连续变量的优化算法
一种改进的连续变量全局优化模拟退火算法
2005年4月系统工程理论与实践第4期 文章编号:100026788(2005)0420103207一种改进的连续变量全局优化模拟退火算法顾元宪,项宝卫,赵国忠(大连理工大学工业装备结构分析国家重点实验室、工程力学系,辽宁大连116024)摘要: 在连续变量的全局优化问题求解中,提出了一种改进的模拟退火算法.该算法提出了一种自适应的函数变换方法,解决了模拟退火算法中较难处理的初始温度问题,使初始温度与具体应用问题无关;结合成功-失败法和变尺度方法,提出了有效偏移量的概念,改进了解的产生方式;提出了一种以相对精度为基础的结束准则,较好地解决了计算效率和计算精度的平衡,提高了算法的效率和通用性.数值测试算例验证了本文的改进模拟退火算法的可行性和高效性.关键词: 模拟退火;全局优化;连续变量;相对精度中图分类号: O224 文献标识码: A An Im proved Simulated Annealing Alg orithm for G lobalOptimization Problems with C ontinuous VariablesG U Y uan2xian,XI ANG Bao2wei,ZHAO G uo2zhong(S tate K ey Laboratory of S tructural Analysis for Industrial Equipment,Dept.of Engineering Mechanics,Dalian University of T echnology,Dalian116024,China)Abstract: In this paper,an improved simulated annealing(S A)alg orithm is developed to s olve the globaloptimization problems with continuous variables.By introducing a method of adaptive conversion function,thedetermination of initial temperature,usually a difficult problem in S A has been s olved and becomes independent to thepractical problems s olved.C ombined with the success2failure method and the variable metric method,the conceptionof effective shift2increment is proposed to improve the method generating new s olutions.On the basis of the newlydefined relative precision,a termination criterion is proposed to make better balance between the computationalefficiency and the s olution accuracy,and then,enhance the efficiency and robustness of the S A alg orithm.Thenumerical test examples are given to dem onstrate the feasibility and high-efficiency of the improved S A alg orithmproposed in the paper.K ey w ords: simulated annealing;global optimization;continuous variable;relative precision1 引言求解全局最优解是优化算法研究的重要问题.当函数非凸或呈现分段连续时,难于利用传统的以梯度为基础的优化方法求取全局最优解.模拟退火算法(Simulated Annealing,简称S A)是近年来备受重视的一类软计算方法,在组合优化中取得很好的效果,能解决传统的优化方法难于解决的某些问题[1,2],在V LSI、生产调度、控制工程、神经网络、函数优化等许多领域得到广泛的研究.模拟退火算法的一些变形方法还显示:利用Metropolis算法并适当地控制温度下降过程的模拟退火算法,在连续变量和混合变量的全局优化问题中具有很强的竞争力[3~5].改进已有的模拟退火算法,进一步提高它的计算精度和计算效率,能有效求得全局最优解,是颇有意义的课题.本文对模拟退火算法做了若干改进:首先,通过一种自适应的函数变换方法,使初始温度的确定与具体问题无关,使算法具有更强的通用性和的适应性.其次,在解的产生方法中结合了成功-失败法,使偏移收稿日期:2004205220资助项目:国家自然科学基金(10032030,10228206);国家重点基础研究发展规划项目(G1999032805) 作者简介:顾元宪(1954-),男,教授,主要研究方向:计算力学与工程科学计算,结构与多学科优化.401系统工程理论与实践2005年4月量的产生更加有效;为了加强局部的趋化性搜索能力,在精细搜索阶段采用变尺度方法缩小搜索区间;并且为了充分利用当前的领域信息,还在算法中设置了一个记忆器,使之成为有记忆的模拟退火算法.最后,提出了一种以相对精度为基础的结束准则,同时考虑了降温次数和可行解的个数,以提高算法的健壮性和鲁棒性.算例测试结果表明,上述的改进模拟退火算法具有较强的通用性和适应性,提高了计算效率和计算精度,是一种适合连续变量全局优化问题求解的高效的模拟退火算法.2 模拟退火算法的基本原理及存在问题模拟退火全局优化算法的基本原理如下:1)给定初始温度T0和初始点x0,计算该点的函数值f(x0);2)随机产生扰动Δx,得到新点x′=x+Δx,计算新点的函数值f(x′)和差Δf=f(x′)-f(x);3)若Δf≤0,则接受新点,作为下一次模拟退火的初始点;4)若Δf>0,则计算新点的接受概率:p(Δf)=exp(-Δf/(K・T)),产生[0,1]区间上均匀分布的伪随机数r,r∈[0,1].若p≤r,则接受新点作为下一次模拟的初始点;否则仍取原来的点作为下一次模拟退火的初始点.以上步骤称为Metropolis过程.按照一定的退火方案逐渐降低控制温度,重复Metropolis过程,直至达到结束准则,就构成了模拟退火算法,算法能收敛到全局最优点或近似全局最优点.在同一温度下,重复Metropolis过程的次数称为马尔可夫链长.对于理想模型,经典模拟退火算法在下述条件下收敛于全局最优解:初始温度足够高,降温速度足够慢,终止温度足够低.它表明算法的退火过程很慢,计算效率不高.在连续变量全局优化问题中,在理论上模拟退火算法要对每个温度通过多次迭代达到平衡,当温度从足够高降到足够低时,就可以求出目标函数的最小值,即全局最优解.但是,在每一温度下达到目标函数值的平衡,需要的迭代次数是非常多的,而且理想的退火过程要求温度连续下降,这也是难以达到的.这些都是模拟退火算法效率不高的重要原因.由此,初始温度的确定、解的产生机制、结束准则的确定、计算效率和计算精度的平衡,都是构造模拟退火算法中的重要问题.作为一种随机性搜索方法,经典模拟退火算法还有如下缺点:没有充分利用当前领域知识,搜索序列不单调,在低温下很难跳出局部极小点.改进现有的模拟退火算法,提高计算效率并兼顾精度要求,提高算法的健壮性和适用性,使之能够应用于实际的工程优化问题,这是本文的研究目的.3 改进的全局优化超快速模拟退火算法311 连续变量全局优化的数学模型本文研究如何求解连续变量优化问题的全局最优解,优化问题的数学模型如下:min C(X,Y)s.t. f(X,Y)≤0,(1)h(X,Y)=0其中C为目标函数,f和h为不等式和等式约束条件,X为决策变量,Y为状态变量.应用罚函数法可以将约束优化问题转化为如下罚函数L(X,Y)的无约束优化问题来求解:min L(X,Y)=C(X,Y)+(1+α|C(X,Y)|)∑|max(0,f(X,Y))|+∑|h(X,Y)|s.t. X D≤X≤X U,(2) X D和X U分别表示X的下限和上限,α是惩罚因子(本文在程序中取015).312 初始温度和初始解的确定初始温度的确定始终是模拟退火算法的一个难点.本文通过数值试验研究,提出如下的自适应处理方法:在初始化中随机产生100个满足上下限约束的解,代入(2)式中进行计算,判断有无可行解.如果有可行解,则设置初始温度为5000,从可行解中选出函数值最小的作为模拟退火算法的初始解;否则,初始温度设置为50000,从不可行解中选出罚函数值最小的作为初始解.数值计算表明,在某些复杂的全局优化问题中,这样确定的初始温度有时也会陷入局部极小点.为了解决这个问题,本文再引入一种自适应的函数变换方法:在初始化过程中,记录并计算函数的平均值和最小值,确定一个函数的自适应因子K :有可行解时,K =(L (X ,Y )average -L (X ,Y )min )/(011・T 0).(311) 否则,K =(L (X ,Y )average -L (X ,Y )min )/T 0.(312)这样,可以通过自适应因子K 来调节解的接受准则,从而增强了算法的通用性.313 解的产生机制和降温准则本文采用文[5]提出的一种温度更新函数的启发式降温准则:T k =T 0km,k =1,2, (4)T 0是初始温度;m ≥1是一个常数,一般取m =3;k 是迭代次数;T k 是第k 次降温后的控制温度.在解的产生方式中,本文结合成功-失败法和变尺度方法,提出了利用有效偏移量产生新解的方法.有效偏移量是指当前的解被接受时的偏移量.如果上一个偏移量不是有效偏移量,解的产生函数改进如下:Y k i =X k i +Z ki .Z k i =W i T i (b i -a i )/10∑nj =1W 2j1|U i |m-1,i =1,2,….(5)式中X 是当前解,Z 是迭代偏移量,Y 是新的解,U 、W 是[-1,1]均匀分布的随机量,i 是向量分量,a i 和b i 是向量的第i 分量的下限和上限,m ≥1是同(4)式相同的一个常数,本文取m =3.如果上一个偏移量是有效偏移量,则施行成功-失败法:如果被接受的当前解的罚函数值减小,偏移量打上成功标志,否则偏移量打上失败标志,然后按照下式计算下一迭代的偏移量:Z k i=213・Z k iif success &fabs (Z k i )≤110e 10-Z k i /117if failture &fabs (Z k i )≥110e -8(6) (4)~(6)式可以提高模拟退火算法的计算效率和可靠性,一方面保持了适当的温度下降速度,另一方面又使产生的随机向量保持了一定的散布程度.当找到可行解并且降温次数大于500次时,进入局部的精细搜索.为了提高极小值附近的趋化性搜索效果,在局部的精细搜索阶段采用了由随机数和当前最优解决定的变尺度方法,本文提出新的搜索区间计算方法为:b ′i =l i +(b i -a i )/n i if b ′i ≤b i b i if b ′i >b i ,a ′i=l i -(b i -a i )/n i if a ′i ≥a ia i if a ′i <a i,(7)l i 是当前最优解的分量;n i 是1~50的伪随机数,用以缩短搜索区间、提高搜索效率.在局部的精细搜索阶段,每次降温时同时按一定的比例缩小自适应因子K :K =K/1101.对于(2)式具有边界约束的优化问题,先对随机产生的试探点进行适当的处理,保证其满足给定的边界约束条件,然后再计算相应的目标函数值.计算公式如下:Y k i =b i -(γki -b i )MOD (b i -a i )if γk i >b iγki if a i ≤γki ≤b i a i +(a i -γki )MOD (b i -a i )if γk i <a i,(8)式中i 是向量的分量,a i 和b i 是向量的第i 分量的下限和上限,γk i 是由(5)计算所得的结果,Y ki 是产生的新解.这样处理可以保证使产生的新解一定满足给定的边界约束条件.314 解的接受准则和结束准则501第4期一种改进的连续变量全局优化模拟退火算法解的接受准则按照改进的Metropolis 算法来计算,其公式如下:P (T k )={X k →Y k }=1if L (Y k )≤L (X k )exp L (X k )-L (Y k )K ・T kif L (Y k )>L (X k ),(9)其中K 是自适应因子.对于有约束优化问题,比较它们的罚函数值.在计算中还进行当前可行最优解的判断和处理,以保证记忆器中的解是当前可行最优解.在解的接受准则中还要处理奇异解问题:目标函数或约束函数中若有一个大于一个给定的足够大的正数,此解即为奇异解.遇到奇异解时,重新产生一个新解进行迭代,以保证算法的健壮性.求解过程的结束准则,是模拟退火算法中最难处理的一个环节,其条件的严格或宽松决定了计算效率和求解精度.本文提出了一种综合考虑迭代次数、可行解个数、当前可行最优解的稳定情况的结束准则.为此,定义了一个满足相对精度的概念:所谓满足相对精度是指在间隔一定数量的降温迭代次数中,最优函数值的差的绝对值均小于给定的相对精度系数与当前最优解的绝对值的乘积.满足相对精度是迭代终止的一个必要条件,也是衡量最优值是否稳定的一个标准,取相对精度系数为0100001.如果当前最优解的绝对值小于011时,则取011与相对精度系数的乘积.通过相对精度,可以根据实际情况来解决计算精度和计算效率的平衡,取得比较理想的结果.满足相对精度并且可行解数量大于200,算法正常退出.为了避免偶然因素的作用,迭代次数间隔一般要求较大,对简单问题可以取600个降温迭代间隔;对复杂优化问题,建议取1500个降温迭代间隔以上,以保证有相当高的求解质量.为了保证算法的健壮性,本文还设置了最大的降温迭代次数为50000次,超过此迭代次数后即结束计算.315 算法流程算法流程见图1.4 数值算例本文在算例的计算中,使用P I V 1.5G /256M 计算机和Visual C ++610运行环境;随机数均采用由随机种子数控制的伪随机序列,使结果具有可重复性;迭代次数是指罚函数L (X ,Y )的计算次数.降温迭代间隔越大和马尔可夫链长越长,则求解质量越高,求解效率降低;否则求解效率提高,但陷入局部极小值的可能性会增大.算例中未加说明,均取600个降温迭代间隔来衡量最优解的稳定情况.经典S A 算法的马尔可夫链长的设置标准通常为变量维数的10倍,本文中马尔可夫链长大小的设置标准比经典S A 法要小,主要根据精度要求以及问题的复杂程度和相关性程度随机给定.算例1 求Camel 函数f (x ,y )=(4-211x 2+x 4/3)+xy +(-4+4y 2)y 2的最小值.本例的问题比较简单,马尔可夫链长取1即可,随机种子数取0~9运行10次.每次运行的计算结果前7位有效数字均相同,平均迭代次数为5347次,平均计算时间为0104秒,计算结果及其比较在表1中给出.结果表明,本文算法具有较高的计算精度和计算效率,并且能够有效处理具有多个解的极值问题,只要选取不同的随机种子数,便可能得到不同的多个最优解.本例中有两个最优解,在本文的10次测试中,第一组最优解出现了6次,第二组最优解出现了4次.表1 Camel 函数最小值的计算结果比较f (x ,y )xy迭代次数理论最优解-1.0316280.0898-0.7126没有提供自适应S AG A 法[6]-1.0316130.0879-0.7126没有提供本文S A 法(随机种子数为1)-1.031628-0.08980.71275290本文S A 法(随机种子数为2)-1.0316280.0898-0.71275620算例2 考察如下的6个无约束优化问题:R osenbrock functions :f 1(X )=∑n-1i =1[100(x 2i-x i +1)2+(1-x i )2],|x i |≤30;601系统工程理论与实践2005年4月图1 改进的模拟退火算法流程 Ackley functions :f 2(X )=-20exp -0121n∑ni =1x 2i-exp1n∑ni =1cos2πx i+20+e ,|x i |≤32; Schwefel functions :f 3(X )=∑n-1i =1|x i |+∏ni =1|x i |,|x i |≤10; G riewank functions :f 4(X )=14000∑ni =1x 2i -∏ni =1cosx i i+1,|x i |≤600; G eneralized Schwefel functions :f 5(X )=∑ni =1-x i sin (|x i |),|x i |≤500; G eneralized Rastrigin functions :f 6(X )=∑ni =1(x 2i-10cos (2πx i )+10),|x i |≤10;701第4期一种改进的连续变量全局优化模拟退火算法表2 本文改进的S A法与文[7]S A法计算函数f1(X)~f6(X)结果比较函数算法最佳优化值平均优化值最差优化值优化值方差陷入局部极小次数f1(X) f2(X) f3(X) f4(X) f5(X) f6(X)文[7]S A法0.0911591.70921614.9136123.41752410本文S A法00.0675270.4757550.0062080文[7]S A法0.00032910.91636119.4447228.0206216本文S A法0.0000180.0000540.00017600文[7]S A法1.9893592.4650392.7796820.18469450本文S A法0.0000040.0000130.00011900文[7]S A法00.009970.0418310.01184139本文S A法0.0000010.0150000.1112650.0004740文[7]S A法-12451.0-12098.1-11858.9146.9650本文S A法-12569.5-12569.5-12569.500文[7]S A法0.0585820.1731075.8292790.80527135本文S A法0.0000010.0000090.00015100其中f1(X)~f4(X)和f6(X)极值的最优解为0,f5(X)的最优解为-1256915.采用文[7]提出的算法陷入局部极小的判断标准.为了测试本文方法对高维复杂函数的优化性能和鲁棒性,并与文[7]方法比较,取n=30,随机种子数取0~49运行50次.对问题1和问题3取3000个降温迭代间隔;本例由于问题比较复杂,为了保证求解质量,不陷入局部极小点,马尔可夫链长要较大,问题5取200,其余取100.本文的改进S A法计算结果与文[7]结果的比较见表2,六个问题的平均每次运行时间分别为3211秒、1316秒、4912秒、1013秒、912秒、1116秒.文[7]S A法的结论是单一的模拟退火算法不适合求解高维复杂函数极值,对于低维函数能够取得比较满意的结果.但是表2中对f1(X)~f6(X)的各项测试数据表明,本文的改进S A法对高维复杂函数具有良好的全局优化能力,稳健性令人满意,陷入局部极小值的次数均为0.算例3 考察下面3个有约束优化问题.取随机种子数0~9运行10次.根据文[9]研究,g1(X)~g3(X)的可行率分别为015121%、010010%、5211230%;g1(X)在全局极小点处第一和第四个约束条件是活跃的,g2(X)在全局极小点处所有约束条件都是活跃的,g3(X)在全局极小点处第一和第三个约束条件是活跃的.三个问题求解中的马尔可夫链长分别取10、40、10.min g1(X)=(x1-10)2+5(x2-12)2+x43+3(x4-11)2+10x65+7x26+x47-4x6x7-10x6-8x7s.t. 127-2x21-3x42-x3-4x24-5x5≥0,282-7x1-3x2-10x23-x4+x5≥0,196-23x1-x22-6x26+8x7≥0,-4x21-x22+3x1x2-2x23-5x6+11x7≥0,-1010≤x i≤1010,i=1,2, (7)min g2(X)=x1+x2+x3s.t. 1-010025(x4+x6)≥0,1-010025(x5+x7-x4)≥0,x1x6-833133252x4-100x1+833331333≥0,1-0101(x8-x5)≥0,x2x7-1250x5-x2x4+1250x4≥0,x3x8-1250000-x3x5+2500x5≥0, 100≤x1≤10000,1000≤x i≤10000,i=2,3,10≤x i≤1000,i=4,5,…,8min g3(X)=513578547x23+018356891x1x5+371293239x1-407921141s.t. 0≤c1(X)≤92,90≤c2(X)≤110,20≤c3(X)≤25,c1(X)=851334407+010056858x2x5+0100026x1x4-010022053x3x5,c2(X)=80151249+010071317x2x5+010029955x1x2+010021813x23,c3(X)=91300961+010047026x3x5+010012547x1x3+010019085x3x4,78≤x1≤102,33≤x2≤45,27≤x3≤45,27≤x4≤45,27≤x5≤45.801系统工程理论与实践2005年4月表3 本文改进的S A 法与DCPM 2FG A 法计算问题g 1(X )~g 3(X )结果比较运行次数问题/方法g 1(X )(最优值为680.630)g 2(X )(最优值为7049.331)g 3(X )S A 法DCP M 2FG A 法S A 法DCP M 2FG A 法S A 法DCP M 2FG A 法1680.686680.6327067.6647146.678-31025.553-30665.6392680.709680.6387086.8837182.096-31025.466-30665.5333680.729680.6487105.6357229.908-31025.251-30665.3484680.861680.6517112.6737291.101-31025.098-30664.9045680.878680.6577142.8087313.148-31025.080-30664.8066680.903680.6667158.1307382.573-31024.067-30664.5427680.930680.6787201.9427450.716-31023.969-30463.4668681.021680.6877240.1407653.926-31022.552-30384.6759681.094680.7207389.5127890.198-31021.660-30358.48610681.188680.7817427.5878052.649-31008.001-30127.475迭代次数17,299200,00096,115400,00014,815400,000计算结果以及与文[8]DCPM 2FG A 法的比较见表3,3个问题平均每次运行时间分别为0121秒、1104秒、0116秒.文[8]认为DCPM 2FG A 方法是一种稳健的方法,它能有效处理约束条件并搜索到最优解或近似最优解.表3数据表明:在求解效率上,本文方法比文[8]DCPM 2FG A 法在三个问题中分别提高了1016、312、2610倍;在求解质量上,本文方法比DCPM 2FG A 法在三个问题中分别是差0103%、好3177%、好1158%.值得注意的是:文[7~9]等文献得到的g 3(X )全局最优点为(7810,3310,291995,4510,361776),最优值为-3066515;而本文的改进S A 法得到了更好的最优点为(7810,3310,271071,4510,441969),最优值为-310251553(降低了112%).显然,文[7~9]等陷入了一个局部最优解,而本文方法具有更强的全局优化能力,仅用1万多次迭代就获得相当精确的全局优化解.为了验证上述结果,又进行了180万次迭代计算,得到的结果是(7810,3310,271070977,4510,441969243),目标函数最优值为-310251560242.5 结论本文在连续变量全局优化问题研究中对模拟退火算法做出了如下改进:1)提出了选取固定初始温度方法和一种自适应函数变换方法,提高了算法的适用性和通用性;2)在解的产生方式中利用有效偏移量,并结合变尺度方法和成功-失败法产生新解,提高了算法的计算效率和求解质量;3)提出了以相对精度为基础的结束准则,较好地解决了计算效率和计算精度的平衡.相当数量的数值算例表明,这是一种计算效率高、收敛性好、健壮性强的全局优化模拟退火算法,具有良好的全局优化能力和适用性,可望应用于实际的科学和工程问题.参考文献:[1] K irkpatrick S ,G elatt ,C D Jr ,Vecchi M P.Optimization by simulated annealing[J ].Science11983,220:671-680.[2] Cerny V.Therm odynamical approach to the travelling salesman problem :An efficient simulation alg orithm[J ].J of OptimizationTheory and Applications ,1985,45:41-45.[3] S zu H H ,Hartley P L.Fast simulated annealing[J ].Physics Letter A ,1987,122:157-162.[4] Ingber L.S imulated annealing :Practice versus theory[J ].Mathematical and C omputer M odelling ,1993,18:29-57.[5] 杨若黎,顾基发.一种高效的模拟退火全局优化算法[J ].系统工程理论与实践,1997,17(5):30-33.[6] 樊叔维,张兴志.全局优化算法.自适应模拟退火2遗传算法的研究[J ].光学精密工程,1998,4:16-21.[7] 王凌.智能优化算法及其应用[M].清华大学出版社,2001:147-148.[8] 李敏强,寇纪松,等.遗传算法的基本理论与应用[M].北京:科学出版社,2002:213-398.[9] 潘正君,康立山,等.演化计算[M].北京:清华大学出版社,1998:69-75.901第4期一种改进的连续变量全局优化模拟退火算法。
最小进化法
最⼩进化法⼀、概述最⼩进化法是⼀种优化算法,主要⽤于解决连续变量或离散变量的优化问题。
该⽅法基于⽣物进化原理,模拟⾃然界中⽣物进化的过程,通过不断迭代和选择,寻找最优解。
最⼩进化法的核⼼思想是,通过不断进化,使解的适应度逐渐逼近最优解。
⼆、基本原理最⼩进化法的原理主要包括以下步骤:1.初始化种群:在搜索空间中随机⽣成⼀定数量的个体,每个个体代表⼀个可能的解。
2.计算适应度:根据问题的⽬标函数,计算每个个体的适应度。
适应度越⾼,表示该个体越接近最优解。
3.选择操作:根据适应度的⼤⼩,选择出适应度较⾼的个体进⾏繁殖。
模拟⾃然界的竞争机制,适应度较低的个体被淘汰。
4.交叉操作:通过⼀定概率的交叉操作,⽣成新的个体。
模拟⾃然界中的基因重组过程,以产⽣更优秀的后代。
5.变异操作:对新⽣个体进⾏⼀定概率的变异操作,模拟⾃然界中的基因突变现象。
变异后的个体可以进⼀步优化适应度。
6.迭代更新:重复上述选择、交叉、变异操作,直到满⾜终⽌条件。
终⽌条件可以是达到预设的迭代次数、解的适应度达到预设阈值等。
7.输出最优解:经过迭代进化后,找出适应度最⾼的个体作为最优解。
三、应⽤场景最⼩进化法⼴泛应⽤于各种优化问题,如函数优化、组合优化、机器学习等领域。
以下是⼀些典型的应⽤场景:1.函数优化:最⼩进化法可⽤于求解连续函数的最⼩值或最⼤值问题。
通过模拟进化过程,寻找函数的最优解。
例如,寻找⼀系列函数中的最⼩值点或最⼤值点。
2.组合优化:最⼩进化法也可⽤于解决离散变量优化问题,如旅⾏商问题、背包问题等。
通过将离散变量编码为⼆进制或其他形式,最⼩进化法可以应⽤于求解离散优化问题。
3.机器学习:最⼩进化法可⽤于优化神经⽹络的权重和结构,提⾼模型的性能。
通过不断进化神经⽹络的结构和参数,最⼩进化法可以帮助找到更好的模型。
4.其他领域:最⼩进化法还可应⽤于机器⼈路径规划、化学反应优化、⾦融市场预测等多个领域。
该⽅法具有⼴泛的适⽤性,可以⽤于解决各种不同类型的优化问题。
第4章续 多变量寻优方法
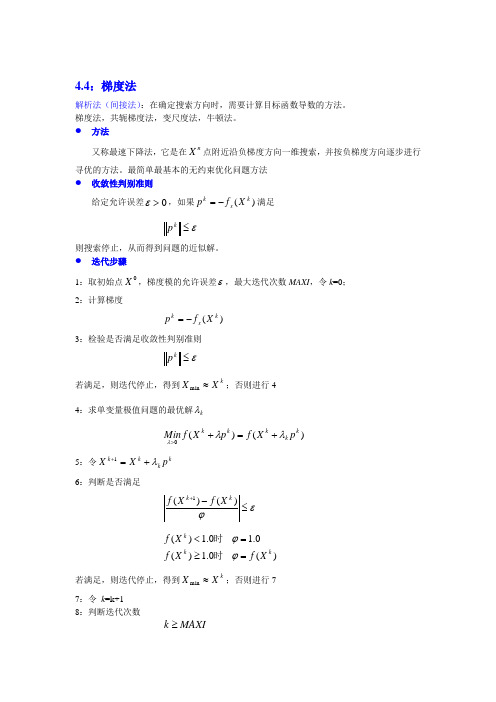
4.4:梯度法解析法(间接法):在确定搜索方向时,需要计算目标函数导数的方法。
梯度法,共轭梯度法,变尺度法,牛顿法。
● 方法又称最速下降法,它是在n X 点附近沿负梯度方向一维搜索,并按负梯度方向逐步进行寻优的方法。
最简单最基本的无约束优化问题方法 ● 收敛性判别准则给定允许误差0>ε,如果)(kx k X f p -=满足ε≤k p则搜索停止,从而得到问题的近似解。
● 迭代步骤1:取初始点0X ,梯度模的允许误差ε,最大迭代次数MAXI ,令k =0; 2:计算梯度)(k x k X f p -=3:检验是否满足收敛性判别准则ε≤k p若满足,则迭代停止,得到kX X ≈min ;否则进行4 4:求单变量极值问题的最优解k λ)()(0k k k k k p X f p X f Min λλλ+=+>5:令k k k k p X Xλ+=+16:判断是否满足εϕ≤-+)()(1k k X f X f)(0.1)(0.10.1)(kk k X f X f X f =≥=<ϕϕ时时若满足,则迭代停止,得到kX X ≈min ;否则进行7 7:令 k =k+1 8:判断迭代次数MAXI k ≥若满足,则迭代停止(非正常),取kX X ≈min ,否则转向2 ● 迭代框图● 优点程序简单,计算机实现起来容易。
对起始点要求也不甚严格,即使从一个较差的初始点出发,一般也能收敛到极小点。
● 缺点在极小点附近收敛得很慢,对于目标函数而言,在起始点远离极小点时,开头几步下降较快,到了极值点时,下降便开始变缓慢,甚至在极小点附近出现来回摆动的情况。
它的收敛快慢与变量尺度关系很大。
2221)(x x X f +=一次迭代 [0,0]22219)(x x X f +=十次迭代]10165.6,10276.5[66--⨯⨯对于小扰动会出现不稳定。
舍入误差或者一维搜索步长的确定不准确,带来小扰动,这些小扰动在个别情况下甚至可能使实际下降方向与理论下降方向成正交的荒谬结论,破坏了方法的收敛性。
朴素贝叶斯处理连续型变量
朴素贝叶斯处理连续型变量
朴素贝叶斯算法最初是针对离散型数据的,如文本分类中的词频统计。
但是,有时候我们需要将连续型变量也应用到朴素贝叶斯算法中。
这时可以借助一些处理方法完成,如:
1.高斯朴素贝叶斯:将连续型变量假设服从高斯分布进行转换和运算。
2.基于区间的贝叶斯分类:将连续型变量分成几个区间,变成类别型
变量进行处理。
3.核密度估计:将连续型变量转换成类别型变量,然后进行朴素贝叶
斯分类。
其中,高斯朴素贝叶斯是最常用的处理方法之一,具体实现方法如下:
1.对于每个连续型变量,计算其均值和方差。
2.将连续型变量转化成类别型变量,具体方法是按照高斯分布的概率
密度函数将连续型变量装换成一个值域在[0,1]范围内(或者是其他相应
区间)的类别型变量。
3.将转换后的类别型变量加入到朴素贝叶斯分类器中进行分类。
需要注意的是,对于高斯朴素贝叶斯分类器,假设所有的类别型变量
都是独立的。
如果连续型变量之间存在依赖性,则需要进一步对数据进行
处理。
数学中的最优化算法

数学中的最优化算法最优化算法是数学中的一种重要分支,其主要目的是寻找问题的最优解。
在现实生活中,很多问题都需要用到最优化算法,比如如何有效地分配资源、制定最佳路线、最小化成本等等。
因此,最优化算法在工业、经济、管理等领域具有广泛的应用。
最优化算法的主要分类最优化算法主要可以分为两类:连续最优化算法和整数最优化算法。
连续最优化算法处理的是连续变量的优化问题,其解通常是实数。
而整数最优化算法则处理的是整数变量的优化问题,其解通常是整数。
具体来说,最优化算法可以分为以下几种:1. 暴力搜索算法暴力搜索算法有时也称为穷举算法,通过在问题所有可能的解中遍历,找到最优解。
因此,这种算法通常被用于解决小规模问题,但是对于大规模问题而言,这种算法的计算量也会非常大,计算效率较低。
2. 梯度下降算法梯度下降算法是一种连续最优化算法,用于求解无约束优化问题。
其思想是在搜索过程中,朝着目标函数的梯度方向去搜索,以找到局部最优解。
这种算法计算效率较高,因为每次只需要计算函数的一阶导数。
3. 分支定界算法分支定界算法是一种整数最优化算法,用于求解可行解离散化的问题。
该算法通过将问题分解成多个子问题,以降低问题的复杂度。
具体来说,分支定界算法在搜索过程中,会将决策点实现两种可能的取值分别作为两个子问题的根节点,分别对两个子问题进行搜索,以找到最优解。
4. 动态规划算法动态规划算法是一种既可以用于连续最优化算法又可以用于整数最优化算法的算法。
其基本思想是将原问题分解为多个子问题,通过计算子问题的最优解,来推导出原问题的最优解。
该算法适用于一些特定的问题,如背包问题、最短路径问题等。
5. 内点法算法内点法算法是一种连续最优化算法,主要用于线性规划和凸优化问题的求解。
其基本思想是通过逐次迭代,将搜索点逐渐移到问题可行域的内部,以找到最优解。
该算法对于大型线性规划问题具有很好的计算效率。
最优化算法的优缺点最优化算法具有一些优点和缺点。
连续优化、离散优化、组合优化与整数优化
连续优化、离散优化、组合优化与整数优化最优化问题(optimization problem)⾃然地分成两类:⼀类是连续变量的问题,称为连续优化问题;另⼀类是离散变量的问题,称为离散优化问题。
1. 连续优化(continuous optimization)连续优化是求解连续优化是求解在连续变量的问题,其⼀般地是求⼀组实数,或者⼀个函数。
离散优化(discrete optimization)2. 离散优化连续优化是求解离散变量的问题,是从⼀个⽆限集或者可数⽆限集⾥寻找⼀个对象,典型地是⼀个整数,⼀个集合,⼀个排列,或者⼀个图。
3. 组合优化(combinatorial optimization)组合优化问题的⽬标是从组合问题的可⾏解集中求出最优解,通常可描述为:令Ω={s1,s2,…,sn}为所有状态构成的解空间,C(si)为状态si对应的⽬标函数值,要求寻找最优解s*,使得对于所有的si∈Ω,有C(s*)=minC(si)。
组合优化往往涉及排序、分类、筛选等问题,它是运筹学的⼀个重要分⽀。
典型的组合优化问题有旅⾏商问题(Traveling Salesman Problem-TSP)、加⼯调度问题(Scheduling Problem,如Flow-Shop,Job-Shop)、0-1背包问题(Knapsack Problem)、装箱问题(Bin Packing Problem)、图着⾊问题(Graph Coloring Problem)、聚类问题(Clustering Problem)等。
这些问题描述⾮常简单,并且有很强的⼯程代表性,但最优化求解很困难,其主要原因是求解这些问题的算法需要极长的运⾏时间与极⼤的存储空间,以致根本不可能在现有计算机上实现,即所谓的“组合爆炸”。
正是这些问题的代表性和复杂性激起了⼈们对组合优化理论与算法的研究兴趣。
4. 整数优化(integer programming, IP)要求所有的未知量都为整数的线性规划问题叫做整数规划 (integer programming, IP) 或整数线性规划 (integer linear programming, ILP) 问题。
数学优化算法的研究与改进

数学优化算法的研究与改进数学优化算法在解决实际问题和优化模型方面起着重要的作用。
本文将从其研究背景、基本原理以及改进方法等方面进行论述,探讨数学优化算法的研究现状以及未来的发展方向。
一、研究背景随着科技的发展和应用领域的扩大,人们对于在有限资源条件下实现最佳效果的需求也越来越迫切。
而数学优化算法正是从数学优化的角度出发,通过寻找问题的最优解,为实际问题提供了解决方案。
因此,对数学优化算法的研究和改进具有重要意义。
二、基本原理数学优化算法可以分为连续型优化和离散型优化两类。
连续型优化是指在连续变量范围内求解最优解,而离散型优化则是在离散变量范围内求解最优解。
在实际应用中,常见的数学优化算法包括线性规划、整数规划、非线性规划、动态规划等。
在连续型优化中,最常用的算法是梯度下降法。
梯度下降法通过不断迭代,不断沿着梯度的负方向更新参数,直至找到函数的最小值。
而在离散型优化中,常用的算法包括遗传算法、模拟退火算法、蚁群算法等。
这些算法基于不同的思想和原理,通过不同的演化和搜索策略来求解离散优化问题。
三、算法改进为了提高数学优化算法的效率和求解精度,研究者们不断进行算法的改进和优化。
以下是数学优化算法改进的几个常用方法:1. 约束处理技术在实际问题中,往往存在着各种约束条件。
为了更好地处理这些约束条件,研究者们提出了各种约束处理技术。
例如,引入罚函数法将约束条件转化为目标函数的一部分,或者通过拉格朗日乘子法将约束条件纳入到目标函数中,从而求解出未知变量的最优解。
2. 启发式算法传统的优化算法在求解复杂问题时往往会陷入局部最优解,而无法找到全局最优解。
为了克服这一问题,研究者们提出了各种启发式算法。
启发式算法通过仿生学、进化计算等思想,模拟自然界的进化过程,以一定的概率接受较差的解,从而有助于跳出局部最优解,找到全局最优解。
3. 并行计算技术随着计算机技术的不断进步,利用并行计算技术来加速数学优化算法的求解已经成为一种趋势。
随机优化算法求解混合整数优化问题
随机优化算法求解混合整数优化问题引言混合整数优化问题(Mixed Integer Optimization Problem)是指在一组约束条件下,求解同时包含连续变量和离散变量的最优解的问题。
这类问题广泛应用于实际工程、管理和经济等领域,例如生产优化、资源分配、路径规划等。
由于离散变量的引入,混合整数优化问题具有较高的计算复杂度,传统的优化算法难以求解。
而随机优化算法由于其随机性和全局搜索能力,成为求解混合整数优化问题的有效方法。
本文将介绍常见的随机优化算法,并探讨如何应用这些算法求解混合整数优化问题。
随机优化算法概述随机优化算法是一类基于概率和随机性的优化方法,其主要特点是通过随机性来搜索解空间,并逐步逼近最优解。
相较于确定性优化算法,随机优化算法无需求解函数的解析表达式,只需能够评估目标函数值即可。
常见的随机优化算法包括模拟退火算法、遗传算法、粒子群算法等。
模拟退火算法模拟退火算法(Simulated Annealing, SA)源自固体物理学中的退火过程,在优化问题中被广泛应用。
该算法通过模拟物质的退火过程,将系统的能量降至较低的状态,从而找到全局最优解。
模拟退火算法的基本思想是通过接受劣解的概率来避免陷入局部最优解,以全局搜索为目标。
算法从一个初始解开始,通过改变解的状态(即变量的取值),计算目标函数的变化,并依概率接受新解。
随着迭代的进行,算法逐渐降低接受劣解的概率,以达到更优解。
模拟退火算法的关键参数包括初始温度、降温速度和终止温度。
初始温度越高,接受劣解的概率越大,有助于跳出局部最优解;降温速度则决定了搜索过程的速度,过快的降温速度可能导致搜索停滞;终止温度通常设定为一个较小的值,当温度低于终止温度时算法停止。
遗传算法遗传算法(Genetic Algorithm, GA)模拟了自然界中生物进化的过程,通过模拟遗传、变异、选择等操作来搜索最优解。
该算法常被用于解决搜索空间巨大而复杂的问题,可以在多个解之间进行搜索,并通过自然选择和遗传操作来进化优秀的个体。
运筹学中的优化算法与算法设计
运筹学中的优化算法与算法设计运筹学是一门研究如何寻找最优解的学科,广泛应用于工程、经济、管理等领域。
在运筹学中,优化算法是重要的工具之一,用于解决各种复杂的最优化问题。
本文将介绍一些常见的优化算法以及它们的算法设计原理。
一、贪婪算法贪婪算法是一种简单而直观的优化算法。
它每一步都选择局部最优的解,然后将问题缩小,直至得到全局最优解。
贪婪算法的优点是实现简单、计算效率高,但它不能保证一定能得到全局最优解。
二、动态规划算法动态规划算法通过将原问题分解为一系列子问题来求解最优解。
它通常采用自底向上的方式,先求解子问题,再通过递推求解原问题。
动态规划算法的特点是具有无后效性和最优子结构性质。
它可以用于解决一些具有重叠子问题的优化问题,例如背包问题和旅行商问题。
三、回溯算法回溯算法是一种穷举搜索算法,通过递归的方式遍历所有可能的解空间。
它的基本思想是逐步构建解,如果当前构建的解不满足条件,则回退到上一步,继续搜索其他解。
回溯算法通常适用于解空间较小且复杂度较高的问题,例如八皇后问题和组合优化问题。
四、遗传算法遗传算法是一种借鉴生物进化过程中的遗传和适应度思想的优化算法。
它通过模拟自然选择、交叉和变异等过程,生成新的解,并通过适应度函数评估解的质量。
遗传算法具有全局搜索能力和并行搜索能力,适用于解决复杂的多参数优化问题。
五、模拟退火算法模拟退火算法是一种模拟金属退火过程的优化算法。
它通过接受劣解的概率来避免陷入局部最优解,从而有一定概率跳出局部最优解寻找全局最优解。
模拟退火算法的核心是温度控制策略,逐渐降低温度以减小接受劣解的概率。
它适用于求解连续变量的全局优化问题。
六、禁忌搜索算法禁忌搜索算法是一种基于局部搜索的优化算法。
它通过维护一个禁忌表来避免回到之前搜索过的解,以克服局部最优解的限制。
禁忌搜索算法引入了记忆机制,能够在搜索过程中有一定的随机性,避免陷入局部最优解。
它适用于求解离散变量的组合优化问题。
综上所述,运筹学中的优化算法涵盖了贪婪算法、动态规划算法、回溯算法、遗传算法、模拟退火算法和禁忌搜索算法等多种方法。
连续优化

连续优化(数学规划):当模型中决策变量的所有分量均为连续数值 线性规划:如果目标函数和约束函数均为线性函数。
非线性规划:如果目标函数和约束函数中至少有一个是非线性函数。
二次规划:目标函数是二次函数,约束函数是线性函数。
离散优化(组合优化):如果模型中决策变量的一个或多个分量只取离散值整数规划:决策变量的一个或者多个分离只取整数数值,进一步分为纯整数规划和混和整数规划。
0-1规划:决策变量的分量中取整数值的范围还限定为只取0和1。
光滑优化:连续优化中的目标函数和约束函数都在可行域内可导非光滑优化:连续优化中的目标函数和约束函数至少有一个在可行域内不可导 凸规划:连续优化中目标函数和约束函数在可行域内都是凸函数非凸规划:连续优化中目标函数和约束函数在可行域内至少有一个不是凸函数 确定性规划:优化模型中的参数和变量具有确定性不确定性规划:优化模型中的参数和变量具有不确定性(随机性或模糊性) 随机规划:优化模型中的参数和变量具有随机性 模糊规划:优化模型中的参数和变量具有模糊性 单目标优化:目标函数只有一个 多目标优化:目标函数有多个目标规划:在多目标优化中选取正负偏差量、目标的优先因子和权系数 单阶段优化(静态优化):决策变量在多个期间内与决策的序列无关 多阶段优化(动态优化):决策变量在多个期间内与决策的序列有关如例题:例 1 用H 乘子法解约束问题22121212min 2;. . 6, 2.x x s t x x x x ++=-+≥ 解 构造增广目标函数()()(){}{}()()22121221222122212122212 (;,,) 26 61 max 0,22.426 6, 4F x v x x x x x x v x x v x x x x x x λμλμμμλνμμ=+-+-++-⎡⎤+--+--⎣⎦+-+-++--= ()()(){}12222121212221212 222661 22, 242x x x x x x x x v x x v x x νμλμνμμμ⎧⎪⎪-+-≥⎪⎪⎨+-+-++-⎪⎪⎪+--+---+-<⎡⎤⎣⎦⎪⎩(1)考虑D:12 22x x νμ-+-≥的情形. 令 ()()()1122122260,,,0426x x x F x x x x λμλνμλμ-++-⎡⎤⎡⎤∇==⎢⎥⎢⎥-++-⎣⎦⎢⎥⎣⎦,得121212,2346x x λμλμμμ++==++. 检验:12122482204646x x λμλμμμ+++-+-=--=-<++(对于足够大的μ),故未得到F 的极小点.(2)另考虑D 1:12 22x x νμ-+-<的情形. 这时,计算并令 ()()()()()()()1121221212 ;,,226220 (1),0 (2)42622F x x x x v x x x x x v x x λνμλμμλμμ∇⎛⎫-++-+--+-⎛⎫⎪== ⎪ ⎪-++----+-⎝⎭⎝⎭由(1)+(2)和(1)-(2)得()()1212121222 60,(3) (4)2220,x x x x x x v x x λμμ+-++-=⎧⎪⎨-+--+-=⎪⎩ 又由(3)+(4)和(3)-(4)得112224 80,44160,x v x x v x λμμλμμ-++-=⎧⎨--+-=⎩ 由此解得12816,2444x x λνμλνμμμ-+++==++. 检验:12122 2281622444 28161 222242 , 2x x vx x μλνμλνμνμμμλνλννμμμμμμνμ-+-+-=-+++-+++=-+⎛⎫++ ⎪⎪=+-⎪++ ⎪⎝⎭<(4)且在该点处 ()224,,,044F x μλνμμ+⎛⎫∇=>⎪+⎝⎭.所以()816,,,2444Tx λνμλνμλνμμμ⎡⎤-+++=⎢⎥++⎣⎦是F 的极小点.把上式中的,λν换为,k k λν,然后将1x 和2x 的表达式代入乘子迭代公式,得1181626,24448162 2.2444k k k k k kk k k kk k λνμλνμλλμμμλνμλνμννμμμ++⎧⎛⎫-+++=-+-⎪ ⎪++⎪⎝⎭⎨⎛⎫-+++⎪=--+- ⎪⎪++⎝⎭⎩当*μμ>时,对上式取k →∞的极限,则有********816 60,(5)2444 816(6) 20.2444λνμλνμμμλνμλνμμμ⎧-++++-=⎪++⎪⎨-+++⎪-+-=⎪++⎩由(5)+(6)和(5)-(6)得****168,(7)22 8(8) 4.12λνμμλνμμ⎧++=⎪+⎪⎨-+⎪=⎪+⎩解之得**10,6λν==.于是,(只要*μμ>,得)原问题的最优解为()[]*10,6,2,4Tx x μ==. □例2用外部罚函数法求解约束问题2212121212min (2)(1);.. 10, 20, 0, 0.x x s t x x x x x x -+--+≥--+≥≥≥解 构造增广目标函数2212122211222121221212(,;) (2)(1) [()() (2)(2) (1)(1)],F x x x x x u x x u x x x u x x x x u x x μμ=-+-+++--+--++-+-+求解无约束问题()12min ,;F x x μ.(1) 考虑D :1212110,20, 0,x x x x x -+≥--+≥≥20x ≥,这时221212(,,)(2)(1)F x x x x μ=-+-,令()12,;0F x x μ∇= ,得[]()2,1T x μ=.将[]()2,1Tx μ=代入D 的约束条件中,有2(())10s x μ=-< ,故()x D μ∉,所以[]()2,1T x μ=不是最优解.(2) 考虑1D :1212110,20, 0, x x x x x -+≥--+<≥20x ≥,这时2221,21212(;)= (2)(1)(2)F x x x x x x μμ-+-+--+,令()12,;0F x x μ∇=,有1122122(2)2(2)0()2(1)2(2)0()x x x a x x x b μμ----+=⎧⎨----+=⎩, , (a )-(b )得211x x =-,再代回(a ),得12321,2121x x μμμμ++==++,有321(),2121Tx μμμμμ⎡⎤++=⎢⎥++⎣⎦.将321(),2121Tx μμμμμ⎡⎤++=⎢⎥++⎣⎦代入1D 的约束条件中,有1()x D μ∈,所以它是无约束问题()12min ,,F x x μ的最优解.而原问题的最优解则为*32131lim ()lim ,,212122TTx x μμμμμμμ→∞→∞⎡⎤++⎡⎤===⎢⎥⎢⎥++⎣⎦⎣⎦. □。
多变量无约束优化牛顿法python代码

多变量无约束优化牛顿法python代码多变量无约束优化牛顿法是一种常用的数学优化算法,在机器学习、数据分析、统计学等领域广泛应用。
本文将介绍多变量无约束优化牛顿法的基本原理,并提供Python代码实现。
牛顿法是一种求解非线性方程和最优化问题的迭代方法。
它利用函数的二阶导数信息来确定函数的极值点。
对于多变量无约束优化问题,牛顿法的迭代公式为:x_{k+1} = x_k - H(f(x_k))^{-1}abla f(x_k)其中,x_k 是第k次迭代的值,H(f(x_k)) 是函数f在x_k处的Hessian矩阵,abla f(x_k) 是函数f在x_k处的梯度向量。
以下是使用Python实现多变量无约束优化牛顿法的代码:```pythonimport numpy as npdef newton_opt(f, f_grad, f_hess, x0, tol=1e-6,max_iter=100):'''多变量无约束优化牛顿法:param f: 目标函数:param f_grad: 目标函数的梯度:param f_hess: 目标函数的Hessian矩阵:param x0: 初始点:param tol: 迭代停止条件:param max_iter: 最大迭代次数:return: 迭代结果'''x = x0for i in range(max_iter):g = f_grad(x)H = f_hess(x)dx = np.linalg.solve(H, -g)x += dxif np.linalg.norm(dx) < tol:breakreturn x```其中,f_grad(x) 和 f_hess(x) 分别是目标函数f在点x处的梯度向量和Hessian矩阵。
np.linalg.solve(H, -g) 是用于求解线性方程组的函数,用于计算牛顿法中的方向dx。
连续优化、离散优化、组合优化与整数优化

连续优化、离散优化、组合优化与整数优化在数学和计算机科学领域,优化问题是一个至关重要的研究方向。
其中,连续优化、离散优化、组合优化与整数优化是常见的几种类型,它们各自有着独特的特点和应用场景。
连续优化是指在一个连续的可行域中寻找最优解。
比如说,我们想要设计一个形状最优的容器,使得在给定材料的情况下能够容纳最多的液体。
这里容器的形状可以通过连续的参数来描述,比如半径、高度等。
在连续优化问题中,目标函数和约束条件通常是连续可微的。
这使得我们可以利用微积分等数学工具来求解。
为了更好地理解连续优化,让我们来看一个具体的例子。
假设有一个工厂生产某种产品,成本函数是关于产量的连续函数。
工厂的目标是在满足市场需求和生产能力等约束条件下,确定最优的产量,以使利润最大化。
通过对成本函数和收益函数的分析,运用导数等数学工具,就可以找到最优的产量值。
离散优化则与连续优化不同,它的可行解是离散的。
想象一下,在安排员工的工作班次时,每个员工要么上班,要么休息,不存在中间状态。
这就是一个离散的决策问题。
离散优化在实际生活中的应用非常广泛,比如资源分配、生产调度等。
离散优化问题的求解往往比连续优化更具挑战性。
因为在离散的空间中搜索最优解,不像在连续空间中可以利用导数等光滑的性质。
常见的解决离散优化问题的方法包括分支定界法、动态规划等。
以一个简单的背包问题为例。
我们有一个背包,其容量有限,还有一系列不同价值和重量的物品。
我们的目标是选择一些物品放入背包,使得背包中的物品总价值最大,同时不超过背包的容量限制。
这就是一个典型的离散优化问题,需要通过巧妙的算法和策略来找到最优的物品组合。
组合优化是一类特殊的离散优化问题,它涉及到从一个有限的组合集合中选择最优的元素组合。
比如旅行商问题,要找到经过一系列城市并回到起点的最短路径。
组合优化问题的特点是解的数量通常是指数级增长的,这使得直接枚举所有可能的解是不现实的。
对于组合优化问题,人们开发了许多启发式算法,如模拟退火算法、遗传算法等。
iSIGHT中优化算法分类
iSIGHT中优化方法种类iSIGHT里面的优化方法大致可分为三类:1 数值优化方法数值优化方法通常假设设计空间是单峰值的,凸性的,连续的。
iSIGHT中有以下几种:(1)外点罚函数法(EP):外点罚函数法被广泛应用于约束优化问题。
此方法非常很可靠,通常能够在有最小值的情况下,相对容易地找到真正的目标值。
外点罚函数法可以通过使罚函数的值达到无穷值,把设计变量从不可行域拉回到可行域里,从而达到目标值。
(2)广义简约梯度法(LSGRG2):通常用广义简约梯度算法来解决非线性约束问题。
此算法同其他有效约束优化一样,可以在某方向微小位移下保持约束的有效性。
(3)广义虎克定律直接搜索法:此方法适用于在初始设计点周围的设计空间进行局部寻优。
它不要求目标函数的连续性。
因为算法不必求导,函数不需要是可微的。
另外,还提供收敛系数(rho),用来预计目标函数方程的数目,从而确保收敛性。
(4)可行方向法(CONMIN):可行方向法是一个直接数值优化方法,它可以直接在非线性的设计空间进行搜索。
它可以在搜索空间的某个方向上不断寻求最优解。
用数学方程描述如下:Design i = Design i-1 + A * Search Direction i方程中,i表示循环变量,A表示在某个空间搜索时决定的常数。
它的优点就是在保持解的可行性下降低了目标函数值。
这种方法可以快速地达到目标值并可以处理不等式约束。
缺点是目前还不能解决包含等式约束的优化问题。
(5)混合整型优化法(MOST):混合整型优化法首先假定优化问题的设计变量是连续的,并用序列二次规划法得到一个初始的优化解。
如果所有的设计变量是实型的,则优化过程停止。
否则,如果一些设计变量为整型或是离散型,那么这个初始优化解不能满足这些限制条件,需要对每一个非实型参数寻找一个设计点,该点满足非实型参数的限制条件。
这些限制条件被作为新的约束条件加入优化过程,重新优化产生一个新的优化解,迭代依次进行。
连续变量优化问题的模拟退火算法求解
连续变量优化问题的模拟退⽕算法求解
算法流程,写得有点乱,⾃⼰看
马尔科夫链长度为某⼀温度下的迭代次数
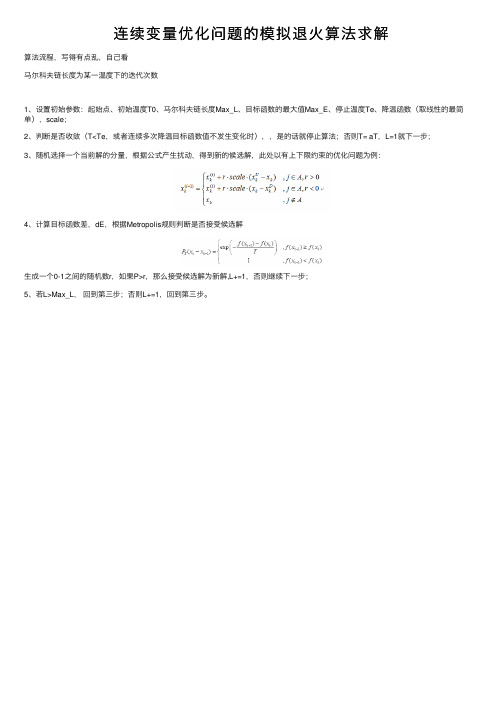
1、设置初始参数:起始点、初始温度T0、马尔科夫链长度Max_L、⽬标函数的最⼤值Max_E、停⽌温度Te、降温函数(取线性的最简单),scale;
2、判断是否收敛(T<Te,或者连续多次降温⽬标函数值不发⽣变化时),,是的话就停⽌算法;否则T= aT,L=1就下⼀步;
3、随机选择⼀个当前解的分量,根据公式产⽣扰动,得到新的候选解,此处以有上下限约束的优化问题为例:
4、计算⽬标函数差,dE,根据Metropolis规则判断是否接受候选解
⽣成⼀个0-1之间的随机数r,如果P>r,那么接受候选解为新解,L+=1,否则继续下⼀步;
5、若L>Max_L,回到第三步;否则L+=1,回到第三步。
连续变量的标准化处理方法
连续变量的标准化处理方法
连续变量的标准化处理方法通常包括以下步骤:
1. 计算变量的平均值和标准差。
2. 对每个原始数据点进行转换,通过减去平均值并除以标准差((x−xˉ)/s)得到标准分数。
这样做可以将原始数据转化为均值为0、标准差为1的z分数,从而更容易比较和解释数据。
另一种常用的标准化方法是极差标准化,也被称为min-max标准化,处理
后可以使多个变量统一量纲,值都落在[0,1]之间。
标准化变量值 =(原变量
值-最小值)/(最大值-最小值)。
标准化处理在数据统计分析中具有重要作用,可以消除变量之间的量纲影响,使数据具有可比性。
连续变量优化模型
变量
猪的重量w( ),饲养时间t≥0 ),t天内饲养猪的化费 天内饲养猪的化费Q(美元),猪的市场价格p ),猪的市场价格 猪的重量 (磅),饲养时间 0(天), 天内饲养猪的化费 (美元),猪的市场价格 饲养时间 售出生猪所获得的总收益R(美元),我们最终获得的净收益C(美元) ),我们最终获得的净收益 (美元/磅),售出生猪所获得的总收益 (美元),我们最终获得的净收益 (美元) 美元 磅),售出生猪所获得的总收益
西南交通大学峨眉校区基础课部 数学教研室 2010年
Mathematical Modeling
多变量优化模型
1.问题分析、假设与符号说明 2.建立数学模型 3.模型求解 4.灵敏性分析
西南交通大学峨眉校区基础课部 数学教研室 2010年
Mathematical Modeling
多变量优化模型
这里涉及较多的变量: s:19英寸彩电的售出数量(台); t:21英寸彩电的售出数量(台); p:19英寸彩电的售出价格(美元/台); q:21英寸彩电的售出价格(美元/台); q 21 / C:生产彩电的成本(美元); R:彩电销售的收入(美元); P:彩电销售的利润(美元)
西南交通大学峨眉校区基础课部 数学教研室 2010年
Mathematical Modeling
单变量连续型优化模型
看看一个具体的情况:一个农民有一头重量大约为 看看一个具体的情况:一个农民有一头重量大约为200磅 磅 的猪,在上一周猪每天增重约 磅 天前猪价为70美分 的猪,在上一周猪每天增重约5磅。5天前猪价为 美分 天前猪价为 /磅,但现在猪价下降为65美分 磅,他应该怎么办? 磅 但现在猪价下降为 美分 美分/磅 他应该怎么办?
西南交通大学峨眉校区基础课部 数学教研室 2010年
连续变量函数全局优化列队竞争算法
1 列队竞争算法
列队竞争算法作为一种群体搜索过程与进化算法的基本机制相似Ψ 也有繁殖、 变异和选择 等操作算子Ψ 主要的区别在于⊥列队竞争算法在进化过程中始终保持 m 个独立并行进化的家 族Ψ 每个家族仅有一个个体Ψ 通过无性繁殖产生后代 1 此外Ψ 在竞争机制上与进化算法完全不 同 1 列队竞争算法中有两个竞争水平 1 一个是纵向竞争Ψ 即指同一家族内繁殖的子代为生存 进行的竞争Ψ 只有一个最优秀个体能够生存Ψ 它代表这个家族[ 另一个是横向竞争Ψ 指不同家族 之间的地位竞争Ψ 根据各个家族目标函数值的大小排列成一个列队Ψ 最优秀家族排在首位Ψ 最 差的家族排在末位 1 该算法的基本思想是⊥通过上述两个水平的竞争Ψ 使列队中的首位个体不 断地被其他家族个体所取代或其值被更新Ψ 以此快速地向最优点逼近 1 为了使每个家族都有
3Σ 根据各个个体在列队中的位置Ψ 按一定比例确定其相应的搜索空间Ψ 处于第一位的搜
索空间最小Ψ 处于最末位的搜索空间最大[ 4Σ 各个个体在各自的相应搜索空间内进行无性繁殖Ψ 产生 n 个彼此差异性尽可能大的 子代个体Ψ 将其中最优秀的一个个体保留下来Ψ 代表 n 个子代个体与父代一起进行生存竞争Ψ 它所属的家族参加下次列队地位的竞争[
摘 要 采用确定型计算策略Κ提出了一种新的群体搜索算法 其优秀的特性 1 关键词 全局优化Μ列队竞争算法Μ 进化算法 中图法分类号 T P 301. 6Μ TQ 021. 8 列队竞争算法Κ用该算法解典
型的测试函数时结果表明Π 该算法具有在复杂搜索空间内迅速搜索到最优解的能力Κ表现出了极
近几年来Ψ 一类模拟生物进化过程的随机搜索、 优化算法在解决某些用传统优化算法难以 解决问题上显示出良好的特性Ψ 受到广泛的关注 1 这类算法包括遗传算法、 进化策略和进化规 划等[ 1~ 6 ] 1 它们的共同特性是群体搜索Ψ 这一特性为求得全局最优解增加了可能性 1 然而Ψ 这 类算法在保持群体多样性、 均衡局部搜索与全局搜索等方面仍不理想Ψ 致使这类算法在求解过 程中常陷于局部优解和出现迟钝状态 1 本文从处理好全局搜索与局部搜索、 个体的相互竞争与相互协作这两对矛盾出发Ψ 用确定 型的计算策略Ψ 提出了列队竞争算法≅ 1 该算法在进化过程中始终保持 m 个独立并行 L CA 法Σ 进化的家族Ψ 通过家族内部的生存竞争和家族间的地位竞争这两种竞争方式Ψ 以促进整个群体 的快速进化并使局部搜索和全局搜索达到均衡 1 算法中引进了竞争推动力的概念Ψ 并给出了 竞争推动力的定量描述Ψ 下面给出此算法的搜索机制Ψ 并进行了特性分析和有关操作的数学描 述1
连续变量函数全局优化算法—列队竞争算法
连续变量函数全局优化算法—列队竞争算法
鄢烈祥;麻德贤
【期刊名称】《应用基础与工程科学学报》
【年(卷),期】1999(0)2
【摘要】提出了一种全局优化搜索新算法——列队竞争算法.算法在模拟进化过
程中,始终保持着独立并行进化的家族,通过家族内部的生存竞争和家族间的地位竞争这两种不同的竞争方式,使群体快速进化到最优或接近最优的区域.根据家族的目标函数值大小排成列队,并按家族在列队中的地位不同获得不同的竞争推动力,使得各个家族在列队中的位置发生动态的变化,从而使得局部搜索与全局搜索达到均衡.数值计算结果表明。
【总页数】7页(P215-221)
【关键词】全局优化;列队竞争算法;进化算法
【作者】鄢烈祥;麻德贤
【作者单位】湖北工学院化工系;北京化工大学计算机系
【正文语种】中文
【中图分类】Q141
【相关文献】
1.连续变量函数全局优化列队竞争算法 [J], 鄢烈祥;麻德贤
2.基于EGA与Alopex算法的非可微函数混合全局优化算法 [J], 翟海峰;苏宏业;
褚健;赵明旺
3.全局优化搜索新算法列队竞争算法(Ⅱ)解网络综合问题 [J], 鄢烈祥;麻德贤
4.基于新颖S型转换函数的二进制粒子群优化算法求解具有单连续变量的背包问题[J], 王泽昆;贺毅朝;李焕哲;张发展
5.全局优化搜索新算法——列队竞争算法(Ⅰ) 解非线性和混合整数非线性规划问题[J], 鄢烈祥;麻德贤
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
连续变量的优化算法
连续变量的优化算法是指用于解决连续变量优化问题的算法。
这些算法通常用于寻找使目标函数达到最优的连续变量值。
常见的连续变量优化算法有:
1.梯度下降法:梯度下降法是一种常用的连续变量优化算法,它通过迭代地沿着函数梯度的负方向寻找最优解。
2.牛顿法:牛顿法是一种基于函数二阶导数的优化算法,它通过迭代地求解方程来找到最优解。
3.拟牛顿法:拟牛顿法是牛顿法的改进,它通过构造一个近似于函数二阶导数的矩阵来加速牛顿法的收敛速度。
4.共轭梯度法:共轭梯度法是一种结合了梯度下降法和牛顿法的算法,它通过迭代地沿着共轭方向寻找最优解。
5.遗传算法:遗传算法是一种基于生物进化原理的优化算法,它通过模拟自然选择和遗传机制来寻找最优解。
6.模拟退火算法:模拟退火算法是一种基于物理退火过程的优化算法,它通过随机地探索解空间来寻找最优解。