MOBA自动找平装置操作手册
沃尔沃ABG8820摊铺机特点

沃尔沃ABG882 0摊铺机特点(1)沃尔沃ABG8820产品的基本特点沃尔沃ABG TITAN8820摊铺机是一款经过全面改进的新一代多功能摊铺机,具有最先进的摊铺技术,并结合无数的摊铺经验,已达到欧洲最高环保标准,完全满足当今世界高效率,低能耗的要求。
同时具备最高的操作舒适度,并能在最恶劣的操作环境中达到理想的摊铺效果。
主机部分1发动机6缸柴油道依茨TCD2013 L06 2V,水冷发动机,功率182 kW。
这种发动机的特点是功率大,油耗小,噪音小,噪音在82分贝以下,低排放,排放符合欧洲三号排放标准。
2独立的散热系统采用独立的散热系统,风扇速度随着温度的提高而加快,风扇速度与发动机转速无关,可适应环境温度最大达到55° C,有效的解决了散热问题。
3行走系统(1)两侧履带各自独立液压系统驱动,电子控制,可以实现摊铺机精确的直线行走,在摊铺弯道时,更加平滑。
(2)履带由一个低速大扭距马达驱动,行星轮减速,这样设计使得整个行走机构结构紧凑,客户便于维修。
(3)全自动液压张紧装置,开机时自动调整履带张紧度,怠速时自动释放履带张紧力,这样的设计使得两侧履带张紧力一致,避免跑偏,并使得两侧履带磨损一致。
4输分料系统左右刮板输料器和左右螺旋布料器都是独立的液压马达驱动,速度都无级可调。
1)刮板输料器开关控制,左右两侧刮板输料器由独立的液压马达和泵控制,速度无级可调,并可选配反转。
2)螺旋布料器由超声波传感器控制,左右两侧螺旋布料器由独立的液压马达和泵控制,速度无级可调,正反转为标准配置。
3)螺旋布料器的高度由液压方式来调节,在改变摊铺厚度时可以很轻松的改变螺旋布料器的高度。
4)四重密封保证了螺旋布料器的稳定性。
EPM电子摊铺管理系统2代,是ABG摊铺机独有的摊铺管理系统,EPM系统的设计确保了对摊铺机的操作更加直观,科学。
配置防强光设计的彩色液晶显示器。
所有的功能按键简明的与摊铺机的工作位置相对应。
罗克韦尔 PlantPAx 全局控制系统 说明书

罗克韦尔自动化出版物 PROCES-UM003A-ZH-P - 2016 年 3 月
3
目录
配置报警 配置历史数据 配置 I/O 块
分配 I/O 和诊断
章节 4
考虑事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79 配置报警组. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79 配置报警和事件横幅 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
控制器项目管理器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 逻辑管理器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 构建过程策略 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 PS_AIn_Chan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 PS_PID_AIn_Chan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 PS_PF755 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 控制器与系统同步 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
铣刨机

如果传感器安装完毕,且坡度设置、电缆连接等也准备就绪,坡度传感器就可以 开始工作。 1 2 3
按动A/M键,将系统切换 至手动状态,“AUTO‖ 指示灯熄灭。
按动控制器的上调键或下 调键、或者操纵机器,将 机器的执行部件调整到所 需的实际工作位置。
按住设定键设置执行部件 的坡度设定值。LCD显示 “SEt‖。.
●拉绳的方向,应保证其与传感器的垂直
正确: 错误:
数字控制器的显示及操作
偏差较大 实际值显示 灯亮:此时LCD上显示 的值为实际值 正、负指示
偏差一般 偏差较小 无偏差
偏差较小 偏差一般 偏差较大
显示值
设定值显示 灯亮:此时LCD上显示 的值为设定值
右坡、左坡 控制器向上、向下输出 准绳指示灯 灯亮:准绳检测模式 灯灭:路面检测模式 自动/手动按键 设定健 零点设置,并且 零点取代控制器 的实际工作值
单位长度的设定
此项菜单仅在纵向传感器被选作有效传感器的前提下,才能在LCD上被显示出 来,因为此项功能仅对纵向传感器有效。 操作人员可在此处预设LCD上显示值的长度单位。长度单位可在“厘米”、“英寸” “英尺”间选择。
同时数次按动A/M键和 设定键。
…直到显示屏交替显示 长度单位符号“CAL‖和 相应的长度单位。 (例如:标准“CEn‖, 即厘米)
YOYO拉绳传感器的尺寸及安装
●首先,铣刨机的铣刨鼓上部、且机器外壳 处须预留安装所需的螺孔 ●安装时,传感器的拉绳出口应该向下(防 止渗水)。拉绳可被 拉出大约 50 厘米。 拉 绳应固定于铣刨机外壳、且预先设计好 的位置
在使用拉绳传感器时,当铣刨鼓完全伸出时,拉绳应保持3厘米 左右于传感器内部以保证传感器有最大的检测范围 拉绳的安装须是:应保证在其应用方面的最大工作范围
平整机操作规程
平整机操作规程一、平整机技术性能平整机平整的来料是经冷轧退火后的成卷带材材质:Q195、Q215、08AL、20、16Mn、SPCC、SPCD、SPCE等带材的机械性能:厚度:0.15-1.2mm宽度:500-1050mm卷径(内/外):φ510/φ1800-φ900mm最大卷重:18吨平整机的部分技术参数:最大轧制力:6000KN最大静压力:8000KN最大轧制力矩:12KN.M轧制速度:900m/min穿带速度:18m/min开卷张力:25-2.5KN卷取张力:35-3.5KN入口平整张力:45-4.5KN出口平整张力:60-6KN工作辊规格:φ430-φ380×1100mm支撑辊规格:φ950-φ890×1050mm张力辊规格:φ610×1100mm延伸率:0-3%延伸率控制精度:<5%工作辊最大开口度:20mm压上油缸直径:φ480/φ360×130mm液压系统工作压力:压上油缸:20Mpa平弯站:18Mpa一般液压系统:10MPa换辊时最大起吊重量:17.5吨二、操作前的检查和准备工作(1)确认钳工维修操作牌、电工维修操作牌已全部收到。
(2)确认生产线上无异物,无人处于危险区内。
(3)互相确认各操作人员已全部到位。
(4)按照电气操作说明书检查供电系统是否正常;操纵台上各种开关是否处于规定的断开位置;电机冷却风机的工作是否正常。
(5)检查稀油循环润滑系统、油气润滑系统、平整液系统及液压系统的工作是否正常;流体压力、温度和流量,各油箱液位是否达到规定范围;工作介质是否符合设计要求。
(6)检查各设备润滑点是否按规定得到润滑;所有油气润滑的辊系轴承座是否积存一定的油量。
(7)检查各种安全防护设施及照明、通讯设施是否齐备,周围环境是否整洁。
(8)检查各设备是否处于规定的初始位置;是否与工艺要求的张力值相适应。
(9)在适当轧制压力下低速转动轧辊30分钟,预热轧辊。
沥青摊铺机摊铺调平操作分析

沥青摊铺机摊铺调平操作分析修建市政、公路沥青路面,都必须用沥青混合料摊铺机(下简称摊铺机)进行沥青混合料的摊铺作业。
这不仅是因为它的摊铺速度快,更重要的是要保证路面的关键技术指标——平整度。
本文简要分析了沥青摊铺机施工操作要点以及摊铺机施工质量控制。
标签沥青摊铺机;摊铺调平;操作分析;质量控制前言目前作业在我国高等级公路工地上的摊铺机,多为进口摊铺机,这些摊铺机性能优越,自动化程度很高。
摊铺机是集机、电、液技术为一体的非常复杂的机械,掌握它要涉及到多方面的专业知识,这对非筑路机械专业人员而言,并非易事。
然而对它有着一般的了解,却又是路面施工技术人员及监理人员应必备的知识之一,否则,很难把握路面施工管理和保证路面质量。
1 摊铺机施工操作要点1.1 牵引臂牵引臂包括前牵引臂、大臂和找平油缸,找平油缸装设于前牵引臂前端,大臂前端铰接于前牵引臂,前牵引臂与大臂之间设有可调节二者夹角的调节装置。
该可调节角度的摊铺机牵引臂具有结构简单紧凑、安装调节方便的优点。
1.2 调平梁结构原理与使用1.2.1 调平梁基本上可以分为两大类:接触式平衡梁和非接触式平衡梁。
1.2.2 接触式平衡梁基准:接触式平衡梁是9米,是浮动基准梁和新铺层基准梁与跨越梁组合长度18米的平均值。
1.2.3 接触式平衡梁结构:接触式平衡梁是一种浮动式基准梁。
它的结构有前、后纵梁跨越梁以及连接件和附件组成。
接触式平衡梁的安装和使用由于现在很少使用不再详细介绍。
1.2.4 非接触式平衡梁原理:非接触平衡是利用超声波测距原理,在路面上一定距离处,使用多个声纳传感器。
它以地面为基准,精确的测出距离的平均值,控制摊铺机大动臂的升降高度。
从而达到更加平整的摊铺效果。
声纳传感器的原理是声纳传感器发射-声波开始计时,声波向下传播碰到参考物体反射-回波,回波碰到接受器,声纳传感器停止计时,它的距离为S=t/2xv(s 距离t 时间v速度)。
声纳传感器的特征:它有一定的工作范围,有一定的工作窗口,温度补偿,故障诊断显示。
DreamMaker-pin调平
DreamMaker调平教程——节选自《DreamMaker用户使用手册》v1.5“产品维护”章节●调平打印平板每一次将打印平板取下后放回打印机时,最好都对打印平板做一次调平。
平台调平分为粗调和精调两种。
如果长时间未使用打印机,建议您粗调结束后进一步精调;如果是取下平台剥离模型后又放回这种一般情况,可以直接跳过粗调这步直接精调。
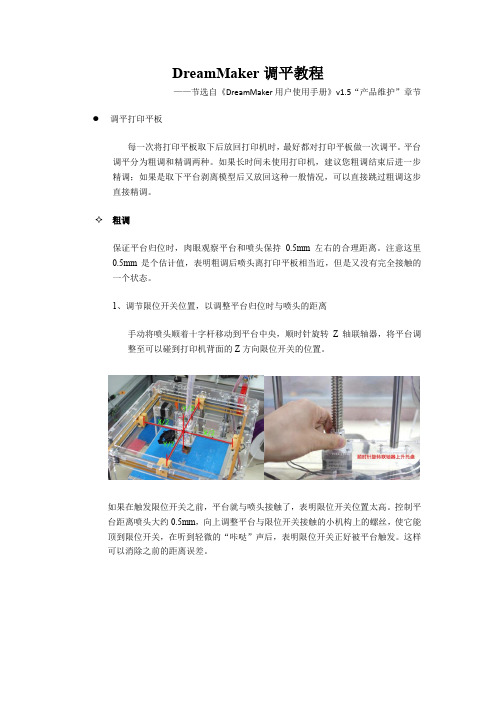
✧粗调保证平台归位时,肉眼观察平台和喷头保持0.5mm左右的合理距离。
注意这里0.5mm是个估计值,表明粗调后喷头离打印平板相当近,但是又没有完全接触的一个状态。
1、调节限位开关位置,以调整平台归位时与喷头的距离手动将喷头顺着十字杆移动到平台中央,顺时针旋转Z轴联轴器,将平台调整至可以碰到打印机背面的Z方向限位开关的位置。
如果在触发限位开关之前,平台就与喷头接触了,表明限位开关位置太高。
控制平台距离喷头大约0.5mm,向上调整平台与限位开关接触的小机构上的螺丝,使它能顶到限位开关,在听到轻微的“咔哒”声后,表明限位开关正好被平台触发。
这样可以消除之前的距离误差。
紧贴如果在碰到限位开关时,平台与喷头还有一定距离(>0.5mm ),表明限位开关位置太低,可以适当向下调整与限位开关接触小机构上的螺丝,使平台在触发限位开关时与喷嘴距离在0.5mm 左右。
2、分别调整平台四角螺丝,使平台水平调整平台水平,可以通过依次拧紧或者拧松平台四角的螺丝做到。
因为喷头一直做标准的平面运动,可以用它做平台水平度的校准器。
将喷头从平台中央移到平台某一角,比如左下角。
观察喷头与平台的距离,顺时针拧紧或者逆时针拧松平台左下角的螺丝,控制喷头与平台的距离在0.5mm 左右。
移动喷头至平台其他三个角,重复之前动作,使得平台四角都与喷头距离0.5mm 。
最后移动喷头到平台中央,微调四周的螺丝,这样平台整个平面都距离喷头0.5mm 左右,理论上是水平了。
平台在未触碰限位开关时先触碰喷头,表明开关位置太高注意:✧在整个操作过程用,避免平台与喷头有过多摩擦,防止喷头损坏。
矫平机操作手册
矫平机操作手册正确处理校平机的点检方法做好正常的维护工作能有效地避免校平机点检不当的问题。
因此,在平时的工作中,要定期对设备进行维护和保养,以提高设备的使用效率。
料越厚,所需结构刚性要越好,辊数越少,辊经越大,功率越大(幅宽一定),反之亦然。
点检步骤如下:1.首先应使该带板举行空运转,检查各部门运转是否正常。
必须保证校平辊轴承有充足的润滑方可正式操作。
2.对校平机滑动、旋转部件及减速器内加注润滑油。
3.对滑动、旋转部位经手动检查,直至机动、无卡阻征象。
4.排除事情上的齐备杂物,并把工件上大概与压辊、导向辊相打仗的焊缝打磨平整。
5.检查校平机电器、电缆等处是否正常。
校平机的安全操作1.开机前,先打开急停,然后选择正反转。
在运行中不可选正反转,要先停机。
2.注意保养,凡是有黄油嘴的地方,一个月加一次黄油,主要是对轴承的润滑。
3.注意辊面的清洁,不允许有焊渣、短小板料或其他东西掉入辊间,以免损坏校平辊。
4.长时间使用后,要检查是否有螺丝母松动,如发现需用扳手拧紧。
如遇到专业性问题,须请专业人员处理询问。
5.树立安全意识,注意人身安全,凡是旋转部位都不能靠近接触!送板料进入校平机时,认得衣服或手等离辊不可太近。
如遇到校平机转速突然升高时,切不可用力拖住板料,以免惯性力卷入机内。
6.在有人检查维修或加油时,必须确保机器电源全部切断。
开机时,也要注意是否有人过分靠近机器。
7.卷料时,注意板料不要碰到电线,以防把电线划破。
8.停机后应断开电源,以防电器长时间工作导致损坏。
校平机微调技巧校平机设备出厂前已经根据客户要求调试完毕。
本说明仅适用于设备微调。
微调步骤如下:1.将板料从校平机牵引辊方向倒入,出板后视板材平整情况进行微调。
2.如果板材呈现上翘现象,可适当调整校平机后手轮向上旋转1-2圈。
3.如果板材呈现下弯现象,可适当调整校平机后手轮向下旋转1-2圈。
4.如果板材呈现校不平现象,可适当调整校平机前手轮向下旋转1-2圈,后手轮应同时向下旋转1-2圈。
智能操控装置手册课件

麦田科技是一家极富创新的高科技公司,经过数年的悉心发展。
麦田科技旗下已经拥有麦田电气和麦田能效两大事业部,涉足电气、能效两大产业,数百种产品。
麦田电气事业部通过对电子、计算机通讯技术的不断探索、研究,已自主研发出具有国际领先水平的麦田开关柜智能操显装置、柜内电气接点温度监测、柜内环境温度测控、开关柜电力参数综合测量、智能环网柜监控装置共五大系列、逾百余种型号产品,全方位的满足客户在电气自动化控制、监测等方面的需求,麦田电气事业部目前已跻身优质电气产品供应商行列,以其优质高性能的产品为中国众多的发电、输电、用电单位提供最新的电气自动化控制、监测解决手段,同时与西门子、ABB 等知名国际电气公司合作为其提供电气自动化智能控制单元。
麦田能效事业部在全球能源危机日益严重、中国节能呼声日益激烈的大背景下,麦田能效事业部凭借着强大的研发能力以及长期对国内工厂、商家、市政等用电情况的跟踪调研,研发出真正适合中国用电情况的八个系列节能节电器,并有100多种专业型号供不同的工矿企业选用。
麦田能效在本着为客户降低能耗成本,创造价值,提供用户核心竞争力的宗旨,已经为中国各个领域的用户提供了上千个节电方案,使用户大幅度的降低用电成本,分享节电所带来的成果,为用户在今天激烈的市场竞争中提供了有力的竞争手段。
今天,麦田科技已经是集研发、制造、市场营销、服务支持于一体,产品涉足电气、能效两大行业的高科技企业,面对未来,麦田科技秉承“创新、诚信、激情、勤奋、务实”的企业精神,以“创造价值、尊重价值”的核心经营理念,倾力打造“电气产品专家、能效产品专家”,不断推动我国电气事业、能效事业向前发展。
麦田科技在创立之初就一直秉承“创造价值、尊重价值”的理念,勤于创新、勇于进取,从研发到生产从产品到服务,麦田科技对每一环节都力求完美,麦田人始终相信“要成为有价值的企业,行业的领先者,就要持续不断地为客户创造价值”。
同时麦田科技尊重每个麦田人及麦田合作伙伴所创造的价值,共同构建和谐、融洽的麦田文化。
平整机操作规程
平整机操作规程一、引言平整机作为土方机械中的一种重要设备,在土地开发、道路建设、建筑工程等领域中发挥着重要作用。
为了确保平整机的操作安全性、高效性和正确性,制定一套科学、规范的平整机操作规程对于保证工作质量和提高工作效率具有重要意义。
本文将详细介绍平整机操作规程,包括操作前的准备工作、平整机的操作流程、平整机的日常维护等内容。
二、操作前的准备工作1. 检查平整机的工作状态:确保平整机的各项功能正常运行,如转向系统、液压系统、刀位调节系统等。
2. 检查工作环境:查看平整机工作区域是否有障碍物、垃圾等,确保工作区域清洁且安全。
3. 确定作业范围和目标:根据实际需求和工作任务,确定平整机的作业范围和目标,如道路平整、场地整理等。
4. 检查工作面状况:查看工作面是否均匀,有无突出物或凹陷等,确保工作面适合进行平整作业。
5. 制定作业计划:根据实际情况,合理制定平整机的作业计划,包括作业时间、作业路线、作业方法等。
三、平整机的操作流程1. 上机准备(1)穿戴合适的劳动防护用品:操作人员应穿戴安全帽、工作服、防护鞋等劳动防护用品,确保个人安全。
(2)熟悉操作控制面板:在上机之前,操作人员要熟悉平整机的操作控制面板,了解各个按钮和开关的功能及使用方法。
2. 启动平整机(1)打开平整机的主电源开关:根据平整机的操作手册,按照正确的顺序打开平整机的主电源开关。
(2)检查仪表盘显示:启动平整机后,仔细观察仪表盘的显示情况,确保各项指示灯正常。
(3)预热发动机:按照平整机操作手册的指示,启动发动机并进行预热,确保发动机处于正常工作温度。
3. 进行平整作业(1)调整刀位和刮板:根据实际需求,根据工作面的状况和要求,合理调整平整机的刀位和刮板,以确保平整作业的质量。
(2)调整行驶速度:根据工作面的情况和工作要求,合理调整平整机的行驶速度,以保证作业效果。
(3)控制平整机行进方向:操作人员根据作业计划,控制平整机的行进方向,确保平整的覆盖面积和路径。
摩巴MOBA找平自动控制系统-平衡梁

MOBA公司生产的超声波非接触式平衡梁控制系统采用先进的滤波、CAN总线 通讯、智能纠错、故障自诊断等技术,使其控制精度更高,使用更方便,能节 省大量的人力物力,极大地减轻了劳动者的工作强度。经过大量工程实际应用 的检验,它是一种可靠、方便、高精度的优良控制系统。在这套系统中有6个 超声波滑靴传感器同时工作,每个传感器上有6个超声波探头,其中5个大探头 用于检测参考物,1个小探头用于温度补偿,最大程度上减小实际测量的误差。 至今,MOBA公司的超声波非接触式平衡梁已经遍布中国的大江南北,在工程 机械行业中有良好的口碑,无论是产品质量还是售后服务都继承了德国严谨的 品质。同时我们还和许多知名的厂商有密切的合作,如国外的DYNAPAC、 WIRTGEN以及国内的三一重工、徐工科技、中联重工、天津鼎盛、广西柳工、 西安宏大等。我们力求产品质量及售后服务来保证不同客户的需求。
螺旋电缆 用于连接机器到找平 系统及系统设备之间 的连线,防油防高温
(数量:10)
超声波非接触式平衡梁梁体一套:
超声波滑靴传感器的介绍
超声波滑靴传感器是通过五个超声波传感器来实现非接触式距离检测,另外 还有一个传感器是用来做为温度补偿的。当以路面为参考基准时,滑靴应纵向工 作,通过五个传感器可以计算检测的平均值。
上调键﹠下调键 控制系统如果采用超声波滑靴,则同 时按动上调键和下调键时,就可以在 准绳感应或路面感应间选择。
在任何状态下,按下自动/手动键,即
可返回工作菜单。
同时按自动/手动,直到交替显示传感器选择符号‘typ’和最新 设定的液压模式值(这里‘1’代表缺省值),通过上下键,可以保 存你期望的液压参数在不同的模式值中 。
设定键﹠上调键或设定键﹠下调键键 利用本组合,可以在不改变设定值的 状况下,改变显示屏上的数值。它既 可在手动状态下实现,也可以在自动 状态下实现。
moba平衡梁操作手册介绍

MOBA-matic(CAN)非接触式平衡梁系统操作手册摩巴(大连)自动控制系统有限公司中国.大连西岗区石峰街1号邮政编码:116013电话:86-411-82498011传真:86-411-82498711电子信箱:wangx@本操作手册中的文字、图片都经过了精心的制作。
尽管如此,仍可能存在一些不足。
如您有针对本操作手册的建议或指出其中的不足,请您与当地的经销商联系。
我们将认真对待您所有的建议或意见。
本手册中一些公司名称、商标名称受商标、专利保护。
版权所有,无MOBA(摩巴)书面同意,不得以任何方式进行复制、转让!定货号: 10-02-00855日期: 04.2006MOBAMobile Automation AGKapellenstr.15D-65555 LimburgInternet:www.moba.deMOBA-MaticV 4.XX 非接触式平衡梁操作手册U目录 :U1. 概述 (4)2. 产品描述 (6)3.系统一览表 (7)4.数字控制器 (8)4. 1数字控制器的描述 (8)4. 2 通电自检 (12)4. 3 传感器的识别 (12)4.4 操作菜单 (13)4.5不同用户设定 (20)5.数字坡度传感器 (21)5.1概述 (21)5.2安装 (21)5.3 数字坡度传感器的操作 (21)6.超声波滑靴传感器 (24)6.1概述 (24)6. 2安装说明和检测范围 (24)6.3超声波滑靴传感器的工作 (26)7.非接触式平衡梁 (29)7.1概述 (29)7.2功能模式 (29)7.3安装说明 (30)7.4非接触式平衡梁的操作 (32)8. 保养维护 (34)9.故障时的补救措施 (34)10.认证声明 (36)1.概述修改权我们力求操作手册的准确及更新。
但为确保我们技术的领先地位,我们有权在没有事先通知的情况下,对我们的产品及其操作作出与本手册不一致的改动。
我们对由此而产生的故障、损失均不负责!包装及储存为确保运输安全,本产品包装严格仔细。
找平仪MOBA-matic中文资料

CAN型MOBA-matic操作手册-汉语-4.28-005 版本操作手册经过精心制作。
但对可能出现的错误或故障,我们将不负责任。
如有关于本手册的建议或意见,请与当地经销商联系。
我们将认真吸取您所提的建议和意见。
本公司的名称、商标等受商标法、专利法及有关贸易条款的保护。
版权所有。
无MOBA公司的书面认可,严禁用于任何目的的复制、传播。
定货号: 10-02-00855日期: 01.2003MOBAMobile Automation AGVor den Eichen 4D-65604 ElzInternet: www.moba.de3目录1. 概述 (6)1.1 简介 (6)1.2 包装及储运 (7)1.3 注意事项 (8)2. 产品简介 (11)3. 系统概要 (12)4. 数字控制器 (14)4.1 控制器描述 (14)4.1.1 LCD (液晶显示屏) (14)4.1.2 LED 显示 (15)4.1.3 功能指示灯 (16)4.1.4 按键 (16)4.1.5按键组合 (17)4.2 通电测试 (18)4.3 传感器识别 (18)4.4 操作菜单 (19)4.4.1 横坡传感器的识别 (21)4.4.2 传感器的选择 (22)4.4.3 三维控制设置 (23)4.4.4 灵敏度设定 (24)4.4.5 控制范围设定 (27)4.4.6 长度单位设定 (28)4.4.7 位置系数 (29)4.4.8 液压模式记录 (332)4.4.9操作菜单框图 (33)4.5 不同用户设定 (34)5. 数字坡度传感器 (37)5.1 描述 (37)5.2 安装 (37)5.3 数字坡度传感器的操作 (38)5.3.1 初始化 (39)5.3. 数字坡度传感器的控制应用 (40)6.超声波滑靴 (41)6.1 描述 (41)6.2 安装说明及工作范围 (41)46.3 超声波滑靴的使用 (43)6.3.1 基准绳感应 (44)6.3.2 路面感应 (45)7. 转动传感器 (47)7.1 描述 (47)7.2 安装说明及应用 (47)7.3 转动传感器的使用 (50)7.3.1 基准绳感应 (51)7.3.2 路面感应 (52)8. 拉绳传感器 (YOYO) (54)(附铣刨机MOBA-Matic操作)8.1 描述 (54)8.2 安装 (54)8.3 拉绳传感器的操作 (56)8.3.1 拉绳传感器的控制应用 (57)9. LS 250激光接收仪 (62)9.1 描述 (62)9.2 安装说明 (62)9.3 LS 250激光接收仪的操作 (64)9.3.1 LS 250激光接收仪的控制应用 (65)10. 非接触式平衡梁 (67)10.1 描述 (67)10.2 功能模式 (68)10.3 安装说明 (69)10.3.1 机械 (69)10.3.2 电气系统 (70)10.4 设置 (72)10.5 平衡梁的操作 (73)10.5.1 平衡梁的控制应用 (74)11. 维护 (76)11.1 综述 (76)11.2 设备的清洁 (76)12. 故障处理 (77)12.1 综述 (77)12.2 故障指示及处理措施 (78)513. 技术参数 (79)14. 认证声明 (88)61. 概述1.1 简介本手册包含MOBA-matic 系统的安装、初始化、操作及其必要的维护、故障处理等。
板料校平机安全操作规程(三篇)
板料校平机安全操作规程1. 在操作板料校平机前,务必穿戴好个人防护装备,包括耳塞、安全鞋、护目镜和手套等。
2. 在开机前,先检查设备的电源、机械和液压系统是否正常,确保设备处于良好的工作状态。
3. 在操作过程中,严禁将手、身体或其他物品靠近旋转部件,以免发生危险。
4. 在调整设备时,应先停止机器运转,并等待旋转部件完全停止后,方可进行操作。
5. 在更换板料时,务必先关闭机器的电源,并等待所有动力装置完全停止后,方可进行更换。
6. 在校平板料过程中,应确保板料牢固地固定在工作台上,防止其滑动或移动。
7. 当设备出现异常声音、异味或其他异常情况时,应立即停止使用,并通知维修人员进行检修。
8. 在维护和清洁设备时,应先切断电源,并等待所有动力装置停止后,方可进行操作。
9. 禁止擅自更改设备的设计结构、参数和电气接线,以免造成设备故障和安全事故。
10. 在操作过程中,应保持机器周围的环境整洁,避免杂物堆积和摆放不当,以免影响设备的正常运行。
11. 在设备使用完毕后,应及时关闭电源,并做好设备的保养工作,以延长设备的使用寿命。
12. 在使用过程中,若发现任何异常情况或有关安全的问题,应立即报告主管,并采取相应的措施进行处理。
以上就是板料校平机的安全操作规程,希望能够帮助到您。
但请注意,在具体操作中,还应根据设备的具体情况和操作手册的要求进行操作,并且应当接受相关的安全培训和指导。
板料校平机安全操作规程(二)1. 操作前,确保板料校平机处于停止状态,并切断电源。
确认周围环境安全,无杂物和障碍物。
2. 检查板料校平机的各个部件是否完好无损,如拖板装置、切割刀具等。
如发现有损坏或故障,应及时维修或更换。
3. 确保操作人员穿戴好个人防护装备,包括安全帽、安全眼镜、耳塞、手套等。
特别是对于有逆向回弹风险的切割刀具,应加装护罩。
4. 操作人员应接受专业培训,并熟悉板料校平机的操作程序和安全规范。
5. 在操作板料校平机之前,应确认工件是否安装牢固,并确保操作区域没有其他人员。
平压平自动烫金机、模切机安全操作规程范本(2篇)
平压平自动烫金机、模切机安全操作规程范本一、操作前准备工作1.1 操作者应首先穿戴好防护用品,包括防护眼镜、耳塞、防尘口罩、耐热手套、防滑鞋等。
1.2 检查设备外观是否完好无损,接线是否正常,各部位是否有杂物累积。
1.3 检查机器的安全开关是否正常,是否能够顺畅地断电。
1.4 确保工作平台清洁干燥,周围无易燃易爆物品。
二、操作步骤2.1 打开电源开关,启动机器。
2.2 调整机器的温度和压力,根据所需加工材料的要求进行调节。
2.3 将待加工的材料放置在工作台上,并调整定位,确保正确对位。
2.4 根据加工要求,调整机器的压力和温度,保证加工质量。
2.5 启动机器,进行加工,保持手和身体远离机器运动部位。
2.6 在加工过程中,及时观察机器的运行情况,如果发现异常应立即停止并检查。
2.7 加工完成后,关闭电源开关,切断电源。
三、操作注意事项3.1 操作者需经过专业培训,并持有相关证书。
3.2 操作者在操作机器时,不得穿戴宽松衣物或手套,以免被卷入机器中。
3.3 不得将手指或其他物品放入机器运动部位,以防发生事故。
3.4 遇到机器故障时,应立即切断电源,停止操作,并通知维修人员。
3.5 加工过程中,严禁将杂物放置在机器上或附近,以免影响机器正常运行。
3.6 加工过程中,及时清理废料和杂质,保持工作台的整洁。
3.7 定期检查设备的使用状况和安全性,并进行必要的维护保养。
3.8 在非正常使用情况下,如遇到异响、异常温升等情况,应立即停止使用,并通知维修人员。
四、紧急情况处理4.1 对于机器发生故障或异常情况时,应立即停止使用,并切断电源。
4.2 如遇到火灾等紧急情况,应立即按下紧急停止按钮,并迅速撤离现场。
4.3 在紧急情况处理时,需保持冷静,不得慌张或随意行动,以免造成更大的伤害。
五、后续操作及维护5.1 完成加工后,及时清洁机器,清除工作台上的废料和杂质。
5.2 定期检查机器的运行状况,如有异常应及时处理或更换损坏部件。
2024年板料校平机安全操作规程(2篇)
2024年板料校平机安全操作规程第一章总则第一条为确保板料校平机的安全运行,保护操作人员的人身安全,减少事故的发生,制定本安全操作规程。
第二条本安全操作规程适用于所有使用板料校平机的操作人员。
第三条操作人员在开始使用板料校平机之前,必须接受相关的安全培训,并且熟悉板料校平机的结构和操作方法。
第四条操作人员必须严格按照本安全操作规程的要求进行操作,禁止任何违反规程的行为。
第五条操作人员在使用板料校平机时必须佩戴个人防护装备,包括安全帽、护目镜、防护手套等。
第二章工作前的准备第六条操作人员在使用板料校平机之前必须检查设备的电源是否正常,各个部件是否工作正常,如有异常情况必须及时报告维修人员进行处理。
第七条操作人员在使用板料校平机之前必须检查工作区域是否清洁整齐,清除杂物和堆积物,确保没有障碍物。
第八条操作人员在使用板料校平机之前必须检查所使用的工具是否完好无损,如有损坏必须更换。
第九条操作人员在使用板料校平机之前必须熟悉操作面板的功能和操作方法,确保能正确地操作设备。
第三章操作规程及注意事项第十条操作人员在使用板料校平机时必须将板料放置在工作台上,调整工作台的高度和角度,保证操作的舒适性和安全性。
第十一条操作人员在使用板料校平机时必须保持集中注意力,注意观察板料的状态,及时调整校平机的参数,确保校平效果达到要求。
第十二条操作人员在使用板料校平机时必须稳定自己的姿势,避免站立不稳或者趴在工作台上操作。
第十三条操作人员在使用板料校平机时必须注意保持双手干燥和清洁,以确保操作的安全性。
第十四条操作人员在使用板料校平机时必须注意禁止碰触设备的运动部件,如有需要调整或者维修,必须先切断电源。
第四章急救措施第十五条操作人员在操作过程中如发生意外事故,必须立即报警并进行急救处理。
第十六条操作人员在使用板料校平机时如发生电器故障,必须立即切断电源并告知维修人员。
第十七条操作人员在使用板料校平机时如发生设备损坏或者异常,必须立即停止操作并与维修人员联系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
- Page 36 -
10. Connection diagram, technical specification and alarm indications
10.1 Pin connections
A=- Batt.B=+ Batt (11...30V DC)C=Output UP D=Output DOWN E=NC F=NC
G=digital Input "side of machine"
H=+ CAN
I=- CAN
J=digital Input "extern valve disconnection"
A=+Vcc (11...30V)
B=Send
C=GND
D=Receive
E=Adr.1
F=Adr./Rec. 2
G=Screen On the controller
To the machine
10 pole cable socket On the controller To the sensor 7 pole case socket
9. Maintenance
The MOBA-matic has been developed for a high level of operating reliability.
At regular intervals the supply cables should be inspected for possible damage and uncleanliness.In order to avoid bad contacts the threads of the connectors and the connector caps must be free of dirt, grease, asphalt or cement. Only suitable cleaning agents should be used.
Interconnection cable 6m (04-02-00240)
to the sensor (7 pole cable socket)to the controller (7 pole cable plug)
- Page 45 -Declaration of conformance
to ISO/EC Guide 22 and EN 45014 standards
Name of manufacturer:
MOBA Mobile Automation Address of manufacture:MOBA Mobile Automation
Vor den Eichen 4
D-65604 Elz
The manufacturer declares that the products:
Product types:MOBA-matic System
Model numbers of the components which were tested in a typical system:
Digital Controller 04-25-10013
Sonic-Ski 04-20-10010
(Test report 909)---Digi Rotary 04-20-40010
(Test report 909)---Digi Slope 04-20-20010
Laserempfänger LS-25004-60-11010
are designed and manufactured to meet the following standards :
Saftey:
DIN VDE 411, part 1, 0001/10.73EMC:EN 55011 - DIN VDE 0875 T11 (1992), class B
ENV 50140 - DIN VDE 847 T3 (1993) criterion A
ENV 50140 - DIN VDE 847 (1993), IEC 65A/77B (Sec) 145/110 criterion A
EN61000-4-2 (1995), IEC 1000-4-2 (1995), VDE0847 part 4-2 criterion B
ENV50141 (1993), E IEC 1000-4-6, E DIN VDE 0843 T6:12/93
EN61000-4-4:1995, IEC 1000-4-4:1995, VDE 0847 part 4-4 criterion B
Performance criteria according to EN 50082 T/2
Additional information:
The products meet the EMC-requirements of 89/336/EEC.
The products were tested in typical configurations.
It is not permitted to take the appliances into service if it is not clarified, that the machine in which this shall be installed is conform to the Council Directive.
Elz, March 14th, 1999Dipl.-Ing. Markus Wendel
Quality manager
13. Declaration of conformace。