三相异步电动机工作原理翻译
三项异步电动机的工作原理
三项异步电动机的工作原理一、引言三项异步电动机是目前工业中最常见的电动机之一。
它具有结构简单、可靠性高、运行稳定等优点,被广泛应用于各个领域。
本文将详细介绍三项异步电动机的工作原理。
二、三项异步电动机的构造三项异步电动机主要由定子和转子两部份组成。
定子是固定在机电壳体内部的部件,而转子则是可以旋转的部件。
定子上绕有三组相互平衡的绕组,转子则通过电磁感应与定子产生转矩。
三、三项异步电动机的工作原理1. 三相交流电源供电三项异步电动机的工作原理基于三相交流电源供电。
当三相交流电源接通后,电流会挨次通过三个相位的绕组,形成一个旋转的磁场。
2. 旋转磁场与转子的互作用由于转子上也存在导体,当转子在旋转磁场的作用下,导体中会感应出电动势,从而在导体上产生电流。
根据法拉第电磁感应定律,电流产生的大小与磁场的变化率有关。
3. 转子的旋转转子上的电流与旋转磁场的互作用会产生一个力矩,使得转子开始旋转。
由于转子与定子之间存在一定的滑差,所以转子的旋转速度会稍慢于旋转磁场的速度。
4. 转子的运行状态当转子旋转起来后,由于转子上的导体不断与旋转磁场发生互作用,转子会受到一个向旋转磁场方向的力矩,使得转子继续旋转。
这样,三项异步电动机就能够持续地将电能转化为机械能。
四、三项异步电动机的特点1. 启动电流较大由于转子的滑差存在,三项异步电动机在启动时需要较大的电流。
为了降低启动电流对电网的影响,通常会采用降压启动、星-三角启动等方法。
2. 转速与负载关系三项异步电动机的转速与负载之间存在一定的关系。
当负载增加时,转速会稍微下降;当负载减小时,转速会稍微上升。
这种特性使得三项异步电动机在不同负载下能够保持相对稳定的工作状态。
3. 高效率三项异步电动机具有较高的效率,能够将电能转化为机械能的效率达到80%以上。
这使得它在工业领域中得到广泛应用。
五、总结三项异步电动机是一种结构简单、可靠性高、运行稳定的电动机。
它通过三相交流电源供电,利用旋转磁场与转子的互作用实现转子的旋转,将电能转化为机械能。
三相异步电动机工作原理

三相异步电动机工作原理什么是三相异步电动机?三相异步电动机是一种常见的交流电动机,也叫做感应电动机。
它通过电磁感应原理实现转动,因为它的转子的转速比空载的旋转磁场稍慢而得名“异步电动机”。
三相异步电动机的组成部分三相异步电动机由定子和转子两部分组成。
定子定子包含三个互相呈120度电位移的线圈,分别被称为A相、B相和C相。
电流通过这三个线圈产生一个旋转磁场。
转子转子通常由类似铜或铝的导体制成,包含一个排列在转子身上且不与定子线圈直接相连的“短路环”。
当定子上产生的旋转磁场与转子相互作用时,导致转子内的电流流动,并产生引起电动力的磁场。
三相异步电动机的工作原理三相异步电动机是由定子磁场作用于转子上的电场而工作的,这也是其异步的来源。
当电机接通电源后,定子线圈中产生的交变电流产生一个旋转磁场,磁场在定子内转动。
此时在转子中会产生出由其自行生成的磁场。
当转子上的磁场与旋转磁场的方向不同,就会产生一个旋转磁场,导致转子开始旋转。
具体地讲,当定子中的电流随时间改变时,这个时变的磁场将在空间中旋转,像一个旋转的磁场波。
此时,三相定子线圈所发出的电流正好呈正、反、零三个不同的相位分别将波浪向前推进120度。
转子上的环路将感受到这个旋转的磁场波,并由于磁场而感生出了电动势。
这种由转子上的电流、定子周围的旋转场和转子本身上所产生的磁场组合而成的旋转势,创造出了一个“滑差”,它是转子的转速和旋转磁场的速度之间的差值。
同样,这个滑差也是一个旋转磁场波,正与电机所产生的磁场波反向旋转。
滑差的大小将影响电机的输出电压和电流,同时也将影响电机的扭矩输出和效率。
电机的转子转速总是略慢于旋转磁场的旋转速度。
三相异步电动机的特点三相异步电动机有以下几个特点:1.简单可靠:三相异步电动机没有滑环、换相器或直流电枢,因此它具有很高的可靠性和稳定性。
2.高效节能:三相异步电动机的效率比其他电机类型高,尤其是在小负载时更为明显。
3.维护简单:三相异步电动机维护费用低,并且不需要频繁更换设备。
三相异步电动机的工作原理

三相异步电动机的工作原理1.磁场的旋转三相异步电动机通过三相电源提供的交流电,形成三个交流电流。
这三个交流电流在电动机内部的绕组中产生旋转磁场。
这个旋转磁场的频率由电源的频率决定,一般为50Hz或60Hz。
绕组中的每个线圈都产生一个旋转的磁场,这些旋转的磁场之间相互作用,形成一个整体旋转的磁场。
2.感应电动势在电动机的旋转磁场中,如果放置一个导体(转子),它会受到电磁感应的作用而产生感应电动势。
这个导体(转子)被称为鼠笼转子,由许多梁或铜条组成。
当鼠笼转子旋转时,它将切割旋转磁场线,导致在导体中产生感应电动势。
由于导体形成了一个闭合电路,感应电动势会导致电流在导体中流动,进而形成一个磁场。
这个磁场与旋转磁场之间的互相作用产生力矩,驱动转子旋转。
3.力的产生根据楞次定律,当鼠笼转子感应电动势产生电流时,它会产生一个与旋转磁场相互作用的力。
这个力的方向是使转子运动,从而实现机械能的输出。
通常,这个力的转矩足够大,足以克服转子的惯性、摩擦和负载的阻力,并使电动机产生既定的转速。
如果负载过大,力矩将减小,电动机可能无法达到其额定转速。
总结:三相异步电动机的工作原理涉及磁场的旋转、感应电动势和力的产生。
通过三相电源提供的交流电,电动机内部的绕组产生一个旋转的磁场。
当鼠笼转子旋转时,它在旋转磁场中产生感应电动势。
感应电动势导致电流在导体中流动,形成一个磁场,与旋转磁场相互作用产生力矩。
这个力矩驱动转子转动,实现机械能的输出。
通过工作原理的理解,可以更好地了解和应用三相异步电动机。
三相异步电动机工作原理介绍

三相异步电动机工作原理介绍电机,即电动机,是一种把电能转化为动能的装置。
在生产中应用极广,被称为现代工业之母。
不同的电机有不同的应用场合,你可能听说过直流电机和交流电机、同步电机和异步电机、步进电机和伺服电机等概念。
随着电机制造技术的不断发展和对电机工作原理研究的不断深入,目前还出现了许多新型的电机,包括稀土永磁电机、开关磁阻电机、同步磁阻电机等。
不过,众所周知,在工业中应用最广泛的,当属「三相异步电机」。
三相异步电机是交流电机的一种,又称感应电机。
它具有结构简单、制造容易、坚固耐用、维修方便、成本较低、价格便宜等一系列优点。
因此,其被广泛应用在工业、农业、国防、航天、科研、建筑、交通以及人们的日常生活中。
作为机械设备的动力来源,三相异步电动机在许多机械设备中应用比较广泛。
那么,三相异步电动机工作原理是什么呢?事实上,电动机通过定子旋转磁场在转子上产生感应电流,产生电磁转矩,电动机转子的转速必须小于同步速率。
因为电动机转子不直接产生磁场。
这就是三相异步电动机工作原理,所以也被称为异步电动机。
三相异步电动机工作原理及电动机功率转换为机械能力的具体方法和过程如下。
感应型电力由电动机定子绕组通过三相交流电流产生,通过三相交换的电流通过电力改变转子,可以通过功率变化改变转子。
当三相异步电进入定子绕组时,会形成旋转磁场,磁场的转速为n1。
当旋转磁场的磁力线被转子导体切割时,转子导体根据电磁感应原理产生感应电动势。
电动机转子导体上电流流动过时,普通电动机转子绕组关闭时。
在转子导体上形成电流时,定子旋转磁场以速度n0切割转子导体感电动势,使导体受电磁力形成电磁转矩,转子以转速N-n0方向旋转,在轴上输出一定大小的机械动力。
三相异步电动机的转子转速N不会加速到旋转磁场的转速n1。
电动机的旋转磁场和旋转之间必须有相对运动才能切割磁力线,电动机电磁转矩在旋转导体上产生感应电流和电动力,使旋转继续朝旋转磁场的方向旋转。
说明三相异步电动机的工作原理
说明三相异步电动机的工作原理三相异步电动机是一种常见的电动机类型,广泛应用于各种工业领域。
它的工作原理是基于电磁感应的原理,通过三相交流电源的供电,产生旋转磁场,从而驱动转子旋转。
本文将详细介绍三相异步电动机的工作原理。
一、电磁感应原理在介绍三相异步电动机的工作原理之前,我们需要先了解电磁感应原理。
电磁感应是指在磁场中运动的导体中会产生感应电动势的现象。
当导体在磁场中运动时,磁通量会发生变化,从而在导体中产生感应电动势。
这个原理是电机工作的基础。
二、三相交流电源三相异步电动机的工作原理基于三相交流电源的供电。
三相交流电源是指由三个交流电压相位差120度的电源组成的电源系统。
在三相交流电源的作用下,电机中的线圈会产生旋转磁场。
三、旋转磁场旋转磁场是指在三相交流电源的作用下,电机中的线圈会产生的磁场。
这个磁场是由三个交流电压相位差120度的电源产生的。
当三相电源的电压大小和相位角度都相等时,电机中的线圈会产生一个旋转磁场。
这个旋转磁场的方向和速度都是固定的,它的方向是由三相电源的相位差决定的,速度是由电源的频率决定的。
四、转子转子是三相异步电动机中的旋转部分。
它由铜条或铜棒制成,通常是固定在轴上的。
当电机中的旋转磁场作用于转子时,转子中的铜条会产生感应电动势,从而在转子中产生电流。
这个电流会产生一个磁场,这个磁场会和旋转磁场相互作用,从而产生一个力矩,驱动转子旋转。
五、工作原理三相异步电动机的工作原理是基于电磁感应原理和旋转磁场原理的。
当三相交流电源的电压大小和相位角度都相等时,电机中的线圈会产生一个旋转磁场。
这个旋转磁场会作用于转子中的铜条,从而在转子中产生电流。
这个电流会产生一个磁场,这个磁场会和旋转磁场相互作用,从而产生一个力矩,驱动转子旋转。
在转子旋转的过程中,由于转子的惯性和摩擦力的作用,转子的转速会略微低于旋转磁场的速度。
这个差异会导致转子中的电流和磁场发生变化,从而产生一个反向的力矩,阻碍转子的旋转。
三相异步直流电动机的工作原理英文
三相异步直流电动机的工作原理英文Working Principle of Three-Phase Induction MotorIntroduction:Construction:Working Principle:When three-phase AC power is supplied to the stator windings, a rotating magnetic field is created due to the phase difference between the windings. This rotating magnetic field inducesvoltage in the rotor windings through electromagnetic induction. In a squirrel cage rotor, the rotor windings are short-circuited by conducting bars, while in a wound rotor, the rotor windings are connected to external resistors or slip rings.As the rotating magnetic field cuts across the rotor windings, currents are induced in the rotor conductors according to Faraday's law of electromagnetic induction. These induced currents generate a magnetic field in the rotor, which interacts with the stator's magnetic field. The interaction of these magnetic fields creates a torque on the rotor, causing it to rotate.The rotating magnetic field in the stator continues torotate at a synchronous speed, which is determined by the frequency of the AC power supply and the number of poles in the stator. The difference between the synchronous speed and theactual rotor speed is called slip. The rotor speed is slightly less than the synchronous speed, which ensures that the rotor constantly experiences a changing magnetic field and experiences torque to keep rotating.Features and Advantages:Applications:Conclusion:In conclusion, the three-phase induction motor operates on the principle of electromagnetic induction, where a rotating magnetic field induces currents in the rotor windings, causing it to rotate. Its construction, working principle, and advantages make it a popular choice in the industry. It is a reliable, efficient, and easy-to-operate motor that serves various industrial purposes.。
三项异步电动机的工作原理

三项异步电动机的工作原理一、引言三项异步电动机是目前最常见的电动机类型之一,广泛应用于工业生产和日常生活中。
了解三项异步电动机的工作原理对于机电的运行和维护具有重要意义。
本文将详细介绍三项异步电动机的工作原理,包括其基本构造、工作原理和运行过程。
二、基本构造三项异步电动机由定子和转子两部份组成。
定子是机电的固定部份,通常由三个相互平衡的绕组组成,每一个绕组都位于120度的相位差。
转子是机电的旋转部份,通常由导体材料制成,通过定子的磁场感应产生转矩。
三、工作原理1. 静止状态当三项异步电动机处于静止状态时,定子的三个绕组分别通电,形成一个旋转磁场。
这个旋转磁场是由三个相位差的正弦波电流产生的,其频率与电源频率相同。
转子处于静止状态,不受磁场的影响。
2. 启动过程当电动机接通电源时,定子绕组中的电流会产生一个旋转磁场,这个磁场会感应到转子中的导体。
由于转子中的导体是导电的,它们会受到磁场的作用而产生电流。
根据洛伦兹力的作用,转子中的电流会与定子的磁场相互作用,使得转子开始旋转。
这个过程称为启动过程。
3. 工作状态一旦电动机启动,转子会开始旋转。
转子的旋转会产生一个自感电动势,这个电动势与定子的电流相互作用,使得电动机继续运转。
在工作状态下,转子的旋转速度会略低于旋转磁场的速度,这是因为转子的旋转会产生一个逆向的电动势,与定子的磁场相互作用,减缓转子的速度。
4. 转子滑差转子的旋转速度与旋转磁场的速度之间的差值称为滑差。
滑差是电动机的一个重要参数,它可以用来衡量电动机的负载情况。
当负载增加时,滑差会增加,电动机的转速会下降。
四、应用领域三项异步电动机在各个领域都有广泛的应用,包括:1. 工业生产:三项异步电动机常用于驱动各种机械设备,如泵、风机、压缩机等。
其高效率和可靠性使其成为工业生产中不可或者缺的动力源。
2. 交通运输:三项异步电动机广泛应用于电动汽车、电动火车等交通工具中。
其高效能和低噪音使其成为可持续交通的重要组成部份。
三相异步电动机的工作原理
空载运行状态。 (2)机械特性曲线上的b点
机械特性曲线上的b点出现在稳定运行区, 是三相异步电动机稳定工作点。
三相异步电动机 的机械特性
三相异步电动机的基础知识
(3)机械特性曲线上的c点 机械特性曲线上的c点为三相异步电动机稳定 运行区和不稳定运行区的临界点,也是出现最大 电磁转矩Tm的点,该点转速对应的转差率Sm称为 临界转差率。
三相异步电动机的基础知识
交流电流在一个周期内五个瞬间所产生的合成磁场的情况
三相异步电动机的基础知识
1)同步转速
磁极对数为1时,一分钟内旋转磁场的转速为: 当旋转磁场具有p对磁极时,旋转磁场的转速为:
n1 ——同步转速, r/min; f ——三相交流电源的频率,Hz; p ——选择磁场的磁极对数,磁极数为2p。
(3)三相异步电动机在额定状态下运行,电动机转速为额定 转速nN,对应的转差率为额定转差率sN。sN一般为0.01~0.07,通 常为0.05左右。
转差率s是三相异步电动机的一个重要参数,在正常运行状态 下,0<s≤1。
三相异步电动机的基础知识
三、三相异步电动机的电磁转矩和机械特性 1.三相异步电动机的电磁转矩T 电磁转矩T 是旋转磁场与转子电流相互作用而产生的。 电磁转矩T 计算公式为:
降低电源电压时机械特性曲线
三相异步电动机的基础知识
2)加大转子电路的电阻可以增大三相异步电动机的启动 转矩和临界转差率,但对最大电磁转矩没有影响。
绕线式异步电动机可以在转子回路中串联电阻来增加启 动转矩。
增大转子电阻时机械特性
三相异步电动机
Y系列三相异步电动机的启动转矩倍数Km一般为
三相异步电动机工作原理
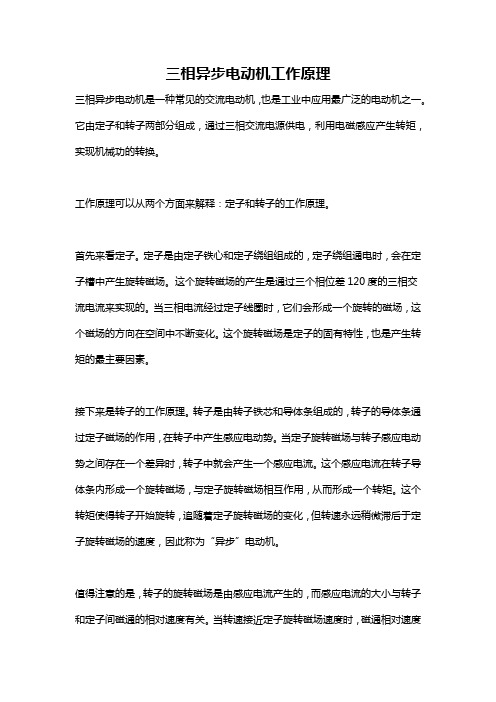
三相异步电动机工作原理三相异步电动机是一种常见的交流电动机,也是工业中应用最广泛的电动机之一。
它由定子和转子两部分组成,通过三相交流电源供电,利用电磁感应产生转矩,实现机械功的转换。
工作原理可以从两个方面来解释:定子和转子的工作原理。
首先来看定子。
定子是由定子铁心和定子绕组组成的,定子绕组通电时,会在定子槽中产生旋转磁场。
这个旋转磁场的产生是通过三个相位差120度的三相交流电流来实现的。
当三相电流经过定子线圈时,它们会形成一个旋转的磁场,这个磁场的方向在空间中不断变化。
这个旋转磁场是定子的固有特性,也是产生转矩的最主要因素。
接下来是转子的工作原理。
转子是由转子铁芯和导体条组成的,转子的导体条通过定子磁场的作用,在转子中产生感应电动势。
当定子旋转磁场与转子感应电动势之间存在一个差异时,转子中就会产生一个感应电流。
这个感应电流在转子导体条内形成一个旋转磁场,与定子旋转磁场相互作用,从而形成一个转矩。
这个转矩使得转子开始旋转,追随着定子旋转磁场的变化,但转速永远稍微滞后于定子旋转磁场的速度,因此称为“异步”电动机。
值得注意的是,转子的旋转磁场是由感应电流产生的,而感应电流的大小与转子和定子间磁通的相对速度有关。
当转速接近定子旋转磁场速度时,磁通相对速度较小,感应电流较小,转矩减小,而当转速越来越低时,磁通相对速度增大,感应电流和转矩也随之增大。
因此,当转速接近定子旋转磁场速度时,转矩减小,电动机难以正常工作。
这就是为什么三相异步电动机通常需要启动时采取特殊措施的原因。
为了解决这个问题,通常会在三相异步电动机的起动过程中使用起动器。
起动器是一种电动机启动器件,通过降低电动机的起动电流和提供额外的转矩,来提高电动机的起动性能。
常见的起动器包括直接起动、星角起动和自耦起动等。
除了起动过程中的特殊措施外,三相异步电动机还具有一些其他的特点。
例如,由于定子绕组的三相对称性,电动机的运行平稳,振动和噪音较小;强度高,转矩大,运行可靠;结构简单,易于制造和安装,维护成本低等。
三相异步电动机的工作原理介绍
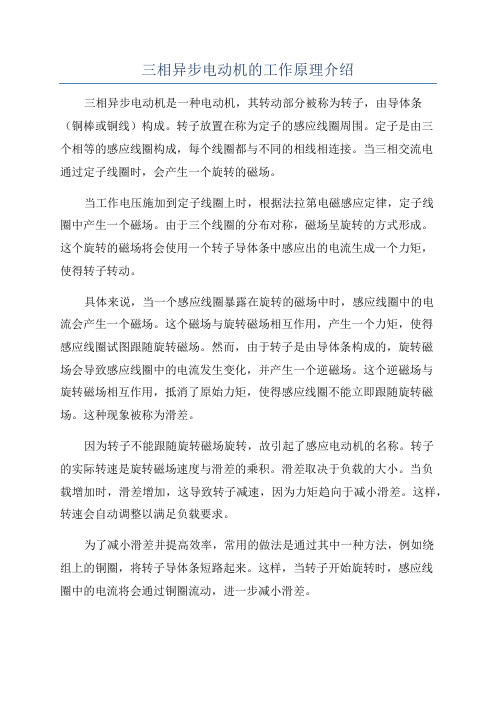
三相异步电动机的工作原理介绍三相异步电动机是一种电动机,其转动部分被称为转子,由导体条(铜棒或铜线)构成。
转子放置在称为定子的感应线圈周围。
定子是由三个相等的感应线圈构成,每个线圈都与不同的相线相连接。
当三相交流电通过定子线圈时,会产生一个旋转的磁场。
当工作电压施加到定子线圈上时,根据法拉第电磁感应定律,定子线圈中产生一个磁场。
由于三个线圈的分布对称,磁场呈旋转的方式形成。
这个旋转的磁场将会使用一个转子导体条中感应出的电流生成一个力矩,使得转子转动。
具体来说,当一个感应线圈暴露在旋转的磁场中时,感应线圈中的电流会产生一个磁场。
这个磁场与旋转磁场相互作用,产生一个力矩,使得感应线圈试图跟随旋转磁场。
然而,由于转子是由导体条构成的,旋转磁场会导致感应线圈中的电流发生变化,并产生一个逆磁场。
这个逆磁场与旋转磁场相互作用,抵消了原始力矩,使得感应线圈不能立即跟随旋转磁场。
这种现象被称为滑差。
因为转子不能跟随旋转磁场旋转,故引起了感应电动机的名称。
转子的实际转速是旋转磁场速度与滑差的乘积。
滑差取决于负载的大小。
当负载增加时,滑差增加,这导致转子减速,因为力矩趋向于减小滑差。
这样,转速会自动调整以满足负载要求。
为了减小滑差并提高效率,常用的做法是通过其中一种方法,例如绕组上的铜圈,将转子导体条短路起来。
这样,当转子开始旋转时,感应线圈中的电流将会通过铜圈流动,进一步减小滑差。
总结来说,三相异步电动机的工作原理是基于三相电流的旋转磁场和导体条中感应电流的相互作用。
这种作用会在转子上产生一个力矩,使其旋转。
滑差的存在导致转速可以根据负载情况自动调节。
通过适当的设计和控制,可以实现高效率和可靠性的运行。
三项异步电动机原理

三项异步电动机原理The three-phase asynchronous motor, also known as the induction motor, is a popular choice in industrial and commercial applications due to its simple construction and reliable operation. 三相异步电动机,也称为感应电动机,在工业和商业领域中广泛应用,因其结构简单和可靠运行而备受青睐。
From a technical perspective, the working principle of a three-phase asynchronous motor is based on the induction of a magnetic field in the rotor by the stator's rotating magnetic field. 从技术角度来看,三相异步电动机的工作原理是基于定子旋转磁场诱导了转子上的磁场。
This induction causes the rotor to rotate and produce mechanical energy, which can then be used to drive various types of machinery. 这种感应使转子产生旋转并产生机械能,然后可以用来驱动各种类型的机械。
One of the key features of the three-phase asynchronous motor is its ability to operate without the need for external commutation, making it a highly efficient and low-maintenance option for manyindustrial applications. 三相异步电动机的一个主要特点是它能够在不需要外部换向的情况下运行,这使其成为许多工业应用中高效且低维护的选项。
三相异步电动机的工作原理

转子受到的电磁力
转子电流与旋转磁场相互作用,会产生电磁 力。电磁力的大小与转子电流、磁通密度和 导体长度有关。电磁力驱动转子转动。
感应电动势会在转子导体中产生电流。 由于转子导体是闭合的,因此电流会在 转子导体中流动,形成转子电流。
转差率与电动机性能的关系
01
转差率的定义
转差率是异步电动机的一个重要参数,表示电动机转速与同步转速之间
旋转磁场的方向
旋转磁场的方向取决于三相交流电源的相序。改变三相交流电源的相序,可以改变旋转磁场的方 向,从而改变电动机的旋转方向。
转子的转动原理
转子导体的感应电动势
当旋转磁场作用于转子导体时,会在转子导 体中产生感应电动势。感应电动势的大小与 导体在磁场中的位置、导体长度和磁通密度 有关。
转子导体的电流
功率因数较高;随着转差率的增大,功率因数逐渐降低。因此,为了提
高电动机的功率因数,也应尽可能减小转差率。
04
三相异步电动机的电磁特性
空载运行时的电磁特性
旋转磁场的产生
当三相异步电动机定子绕组通入三相对称交流电时,会在气隙中产生一个旋转磁场,该磁 场的转速称为同步转速。
转子导体的感应电动势和电流
旋转磁场切割转子导体,会在转子导体中产生感应电动势和电流。感应电流与旋转磁场相 互作用,产生电磁转矩,驱动转子旋转。
检查电动机安装、轴承和转子等方面的问题,如 安装不良、轴承磨损或转子不平衡等,并进行相 应的维修或更换。
电动机的维修和保养
电动机的拆卸和组装
按照规定的步骤和方法进行电动机的拆卸和组装,注意保护各部件不受损坏,并确保组装后的电 动机性能良好。
电动机轴承的维护和更换
定期清洗轴承并更换润滑脂,保持轴承良好的润滑状态。如发现轴承磨损严重或损坏,应及时进 行更换。
三相异步电动机的原理

三相异步电动机的原理
三相异步电动机利用三相交流电源的电流产生旋转磁场,从而使转子产生感应电动势,使转子跟随旋转磁场转动。
它由定子和转子两部分组成。
定子上绕有三个互相平衡的线圈,当交流电源加上相位相差120°的三相交流电时,会在定子绕组内产生交变磁通,形成旋转磁场。
转子内绕有感应电动势的线圈,当转子转动时,感应电动势将使转子内的线圈也产生旋转磁场,从而使转子跟随旋转磁场一起转动。
由于转子的转速不能完全跟随旋转磁场的转速,所以产生了转子的滑差,这就是异步电动机的特殊之处。
异步电动机具有结构简单、性能可靠、使用寿命长、维护方便等优点,广泛应用于各种机械设备中。
- 1 -。
三相异步电机英文缩写
三相异步电机英文缩写英文回答:The abbreviation for a three-phase asynchronous motor is IM. IMs are widely used in industrial and commercial applications due to their simple construction, low cost, and high reliability. They are typically used in applications where constant speed is required, such as pumps, fans, and conveyors.IMs operate on the principle of electromagnetic induction. When a three-phase alternating current (AC) is applied to the stator windings, a rotating magnetic field is created. This rotating magnetic field induces an electromotive force (EMF) in the rotor windings, which causes current to flow in the rotor. The interaction between the rotating magnetic field and the current flowing in the rotor produces torque, which causes the rotor to rotate.The speed of an IM is determined by the frequency of the AC power supply and the number of poles in the stator. The synchronous speed of an IM is the speed at which the rotating magnetic field rotates. The actual speed of an IM is slightly less than the synchronous speed due to slip. Slip is the difference between the synchronous speed and the actual speed of the motor.IMs are available in a variety of sizes and speeds. They can be used in a wide range of applications, from small appliances to large industrial machines.中文回答:三相异步电机的英文缩写为 IM。
说明三相异步电动机的工作原理
三相异步电动机的工作原理1. 引言三相异步电动机是目前最常用的电动机之一,广泛应用于工业生产中。
它的工作原理是基于电磁感应现象的,通过电流和磁场之间的相互作用来实现电动机的转动。
2. 电磁感应原理三相异步电动机的工作原理源于电磁感应原理。
当导体在磁场作用下运动时,根据法拉第电磁感应定律,会在导体两端产生感应电势。
同样地,当通过导体的电流在磁场中运动时,也会受到力的作用。
利用这一原理,可以实现电动机的工作。
3. 电动机结构三相异步电动机主要由定子和转子两部分组成。
3.1 定子定子是电动机的静止部分,通常由三个线圈组成,分别被称为A相、B相和C相。
定子线圈由绝缘铜线绕制而成,形成三个相互间隔120度的线圈。
3.2 转子转子是电动机的旋转部分,它位于定子的内部,并通过轴向支撑。
转子通常由导体材料制成,如铜或铝。
转子中的导体被称为杆,杆沿轴向排列。
4. 工作原理三相异步电动机的工作原理基于电流和磁场之间的相互作用。
在电机工作时,定子中的三个线圈会通过三相交流电源依次通电。
这样就会在定子的三个线圈中产生交流磁场。
同时,当电机启动时,转子中的导体会由于定子的磁场作用而发生电磁感应。
这个感应电势会引起转子杆上的导体中的电流。
由于导体中的电流与磁场相互作用,会在导体上产生一个力,导致转子开始旋转。
5. 旋转机理三相异步电动机的转子旋转是通过交流磁场的变化来实现的。
在定子线圈中,电流的方向和大小是交流的,因此定子线圈产生的磁场也是交流的。
这个交流磁场的变化会引起转子中的感应电势和感应电流的变化。
由于转子中的感应电流和磁场的相互作用,会在转子内部产生一个旋转磁场。
这个旋转磁场和定子中的磁场相互作用,导致转子不断地旋转。
6. 工作特点三相异步电动机的工作具有以下特点:•高效率:三相异步电动机的效率通常在80%以上,是一种比较高效的电动机。
•转速可调:通过改变电源频率或使用变频器,可以实现对电动机转速的调节。
•负载能力强:三相异步电动机能够承受较大的负载,并且能够适应负载的变化。
三相异步电动机的原理
三相异步电动机的原理(2012-09-14 06:26:22)转载▼标签:转载三相异步电动机实现电能与机械能相互转换的电工设备总称为电机。
电机是利用电磁感应原理实现电能与机械能的相互转换。
把机械能转换成电能的设备称为发电机,而把电能转换成机械能的设备叫做电动机。
三相异步电动机的结构与工作原理1.三相异步电动机的构造三相异步电动机的两个基本组成部分为定子(固定部分)和转子(旋转部分)。
此外还有端盖、风扇等附属部分,如图5-1所示。
图 5-1 三相电动机的结构示意图1).定子三相异步电动机的定子由三部分组成:在三相定子绕组中就会产生旋转磁场(图5-4)。
当wt=0时,,AX绕组中无电流;为负,BY绕组中的电流从Y当wt=1200时,,BY绕组中无电流;为正,AX绕组中的电流从A流入X流出;为负,CZ绕组中的电流从Z流入C流出;由右手螺旋定则可得合成磁场的方向如图5-4(b)所示。
当wt=2400时,,CZ绕组中无电流;为负,AX绕组中的电流从X流入A流出;为正,BY绕组中的电流从B流入Y流出;由右手螺旋定则可得合成磁场的方向如图5-4(c)所示。
可见,当定子绕组中的电流变化一个周期时,合成磁场也按电流的相序方向在空间旋转一周。
随着定子绕组中的三相电流不断地作周期性变化,产生的合成磁场也不断地旋,因此称为旋转磁场。
(2).旋转磁场的方向旋转磁场的方向是由三相绕组中电流相序决定的,若想改变旋转磁场的方向,只要改变通入定子绕组的电流相序,即将三根电源线中的任意两根对调即可。
这时,转子的旋转方向也跟着改变。
3).三相异步电动机的极数与转速(1).极数(磁极对数p)三相异步电动机的极数就是旋转磁场的极数。
旋转磁场的极数和三相绕组的安排有关。
当每相绕组只有一个线圈,绕组的始端之间相差1200空间角时,产生的旋转磁场具有一对极,即p=1;当每相绕组为两个线圈串联,绕组的始端之间相差600空间角时,产生的旋转磁场具有两对极,即p=2;同理,如果要产生三对极,即p=3的旋转磁场,则每相绕组必须有均匀安排在空间的串联的三个线圈,绕组的始端之间相差400(=1200/p)空间角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三相异步电动机的结构及工作原理一结构三相异步电动机的种类很多,但各类三相异步电动机的基本结构是相同的,它们都由定子和转子这两大基本部分组成,在定子和转子之间具有一定的气隙。
此外,还有端盖、轴承、接线盒、吊环等其他附件,如图1.1所示。
图1.1 封闭式三相笼型异步电动机结构图1—轴承;2—前端盖;3—转轴;4—接线盒;5—吊环;6—定子铁心;7—转子;8—定子绕组;9—机座;10—后端盖;11—风罩;12—风扇1.定子部分定子是用来产生旋转磁场的。
三相电动机的定子一般由外壳、定子铁心、定子绕组等部分组成。
(1)外壳三相电动机外壳包括机座、端盖、轴承盖、接线盒及吊环等部件。
机座:铸铁或铸钢浇铸成型,它的作用是保护和固定三相电动机的定子绕组。
中、小型三相电动机的机座还有两个端盖支承着转子,它是三相电动机机械结构的重要组成部分。
通常,机座的外表要求散热性能好,所以一般都铸有散热片。
端盖:用铸铁或铸钢浇铸成型,它的作用是把转子固定在定子内腔中心,使转子能够在定子中均匀地旋转。
轴承盖:也是铸铁或铸钢浇铸成型的,它的作用是固定转子,使转子不能轴向移动,另外起存放润滑油和保护轴承的作用。
接线盒:一般是用铸铁浇铸,其作用是保护和固定绕组的引出线端子。
吊环:一般是用铸钢制造,安装在机座的上端,用来起吊、搬抬三相电动机。
(2)定子铁心异步电动机定子铁心是电动机磁路的一部分,由0.35mm~0.5mm厚表面涂有绝缘漆的薄硅钢片叠压而成,如图1.2所示。
由于硅钢片较薄而且片与片之间是绝缘的,所以减少了由于交变磁通通过而引起的铁心涡流损耗。
铁心内圆有均匀分布的槽口,用来嵌放定子绕圈。
(a)定子铁心(b) 定子冲片图1.2 定子铁心及冲片示意图(3)定子绕组定子绕组是三相电动机的电路部分,三相电动机有三相绕组,通入三相对称电流时,就会产生旋转磁场。
三相绕组由三个彼此独立的绕组组成,且每个绕组又由若干线圈连接而成。
每个绕组即为一相,每个绕组在空间相差120°电角度。
线圈由绝缘铜导线或绝缘铝导线绕制。
中、小型三相电动机多采用圆漆包线,大、中型三相电动机的定子线圈则用较大截面的绝缘扁铜线或扁铝线绕制后,再按一定规律嵌入定子铁心槽内。
定子三相绕组的六个出线端都引至接线盒上,首端分别标为U1, V1, W1 ,末端分别标为U2, V2, W2 。
这六个出线端在接线盒里的排列如图1.3所示,可以接成星形或三角形。
图1.3 定子绕组的联结(a)星形连接(b)三角形连接2.转子部分(1)转子铁心是用0.5mm厚的硅钢片叠压而成,套在转轴上,作用和定子铁心相同,一方面作为电动机磁路的一部分,一方面用来安放转子绕组。
(2)转子绕组异步电动机的转子绕组分为绕线形与笼形两种,由此分为绕线转子异步电动机与笼形异步电动机。
①绕线形绕组与定子绕组一样也是一个三相绕组,一般接成星形,三相引出线分别接到转轴上的三个与转轴绝缘的集电环上,通过电刷装置与外电路相连,这就有可能在转子电路中串接电阻或电动势以改善电动机的运行性能,见图1.4。
图1.4 绕线形转子与外加变阻器的连接1—集电环;2—电刷;3—变阻器②笼形绕组在转子铁心的每一个槽中插入一根铜条,在铜条两端各用一个铜环(称为端环)把导条连接起来,称为铜排转子,如图1.5(a)所示。
也可用铸铝的方法,把转子导条和端环风扇叶片用铝液一次浇铸而成,称为铸铝转子,如图1.5(b)所示。
100kW以下的异步电动机一般采用铸铝转子。
(a)铜排转子(b)铸铝转子图1.5 笼形转子绕组3.其他部分其他部分包括端盖、风扇等。
端盖除了起防护作用外,在端盖上还装有轴承,用以支撑转子轴。
风扇则用来通风冷却电动机。
三相异步电动机的定子与转子之间的空气隙,一般仅为0.2mm~1.5mm。
气隙太大,电动机运行时的功率因数降低;气隙太小,使装配困难,运行不可靠,高次谐波磁场增强,从而使附加损耗增加以及使启动性能变差。
二.三相异步电动机原理当向三相定子绕组中通过入对称的三相交流电时,就产生了一个以同步转速n1沿定子和转子内圆空间作顺时针方向旋转的旋转磁场。
由于旋转磁场以n1转速旋转,转子导体开始时是静止的,故转子导体将切割定子旋转磁场而产生感应电动势(感应电动势的方向用右手定则判定)。
由于导子导体两端被短路环短接,在感应电动势的作用下,转子导体中将产生与感应电动势方向基本一致的感生电流。
转子的载流导体在定子磁场中受到电磁力的作用(力的方向用左手定则判定)。
电磁力对转子轴产生电磁转矩,驱动转子沿着旋转磁场方向旋转。
通过上述分析可以总结出电动机工作原理为:当电动机的三相定子绕组(各相差120度电角度),通入三相对称交流电后,将产生一个旋转磁场,该旋转磁场切割转子绕组,从而在转子绕组中产生感应电流(转子绕组是闭合通路),载流的转子导体在定子旋转磁场作用下将产生电磁力,从而在电机转轴上形成电磁转矩,驱动电动机旋转,并且电机旋转方向与旋转磁场方向相同The three-phase asynchronous motor structure and working principle 1. The structure of three-phase asynchronous motor:Types of three-phase asynchronous motor, but all kinds of three-phase asynchronous motor is the same basic structure, they are the stator and rotor of these two basic components, the stator and rotor has a certain air gap between. In addition, end caps, bearings, cable boxes, rings and other accessories, As shown in Figure 1.1.Figure 1.1 Closed-end three-phase cage induction motor structure1 - bearing;2 - the front cover;3 - axis;4 - Junction Box;5 - rings;6 - stator core;7 - rotor; 8 - stator windings; 9 - base; 10 - after the end caps; 11 - wind shield;12 - Fan1. Stator partStator is used to generate the rotating magnetic field. Stator three-phase motors generally shell, stator core, stator windings and other parts.(1) shellThree-phase motor casing including base, end caps, bearing caps, rings, such as junction boxes and components.Machine Block: cast iron or steel casting molding, and its role is to protect and fixed three-phase motor stator windings. Small and medium-sized three-phase motor base and two end caps supporting the rotor, which isthree-phase electrical machinery an important part of the structure. Typically, the base looks good thermal performance requirements, so there are generally cast heat sink.Cover: The casting of cast iron or cast steel molding, which is fixed to the rotor center in the stator cavity, the rotor in the stator in the rotating evenly.Bearing Caps: Cast iron or steel casting is formed, its role is a fixed rotor, the rotor can not move axially, and lubricants storage and protection from the role of bearing.Junction Box: Cast iron casting in general is that its role is to protect and fixed pinout terminals of the windings.Rings: steel manufacturing in general is installed in the upper base for lifting, moving, carrying three-phase motor.(2) Stator CoreInduction motor stator core is part of the motor circuit from 0.35mm ~ 0.5mm thick coated with a thin insulating paint from silicon, as shown in Figure 1.2. And as a result of silicon thin film and between the insulation film, so reduced as a result of alternating magnetic flux through the core caused by eddy current loss. Core inner circle are uniformly distributed the slot to put the stator cruising inlay.(A) stator core (b) stator laminationFigure 1.2 Stator Core and red-chip diagram(3) The stator windingsThree-phase motor stator windings are part of the circuit, there are three-phase three-phase motor windings, symmetrical three-phase current access, it will have a rotating magnetic field. Three-phase winding consists of three separate components of the winding, and each has a number of coil windings connected. Is a phase of each winding, each winding in the space angle difference between the 120 ° electrical. Coil of copper wire from the insulation or insulated aluminum wire around the system. Small andmedium-sized three-phase motors use a round wire, large and medium-sized three-phase motor stator windings are insulated with a larger cross-section aluminum flat wound copper wire or flat system, and then embedded in a certain law of stator core slots. Three-phase stator windings of the six round side are directed to the junction box on the first side, respectively, marked U1, V1, W1, respectively, marked as the end of U2, V2, W2. The six round side of the box with the wiring as shown in Figure 1.3, you can access into a star or triangle.Figure 1.3 links the stator windings(A) star connection (b) triangle connecting2. Rotor part(1) Rotor CoreWith 0.5mm thick steel from, set in the shaft, the role and the same stator core, on the one hand, as part of the motor magnetic circuit, on the one hand to place the rotor windings.(2) rotor windingsThe rotor winding induction motor winding is divided into two kinds of cage-shaped and which is divided into winding rotor asynchronous motor with cage induction motor.①shaped winding windingLike with the stator windings is also a three-phase winding, the general access into astrocytes, respectively, received a three-phase pinout on the three axes and axes of the collector ring insulation, and through the brush device connected with the external circuit, which may circuit in the rotor resistance or electromotive force in series in order to improve the operation of motor performance, see Figure 1.4.Figure 1.4 Rotor winding-shaped connection with the plus rheostat1 - collecting ring;2 - Brush;3 - Varistors②cage windingRotor core in each slot a copper insert in the ends of the copper with a 铜环(known as side Wan) to connect the lead article, called copper rotor, Figure 1.5 (a) as shown in . Aluminum methods can also be used to guide the rotor end ring and fan blades made of aluminum casting a liquid, known as cast aluminum rotor, Figure 1.5 (b) below. Following the induction motor100kW generally cast aluminum rotor.(a) copper rotor (b) cast aluminum rotorFigure 1.5 Rotor cage3. Other parts ofOther parts including the cover, fans, etc.. In addition to the role of end caps to protect, in the end caps is also fitted with bearings to support the rotor shaft. Cooling fan motor is used for ventilation. Three-phase asynchronous motor stator and rotor of the air gap between the general is only 0.2mm ~1.5mm. Air gap too large, the motor run-time to reduce the power factor;air-gap is too small to make the assembly difficult, does not run a reliable, high-harmonic magnetic field increased, thus increasing wear and tear as well as additional start-up performance to deteriorateII. The principle of three-phase asynchronous motor :When the three-phase stator windings through the three-phase alternating current into symmetric, they have had a n1 synchronous speed along the stator and rotor space for inner circle clockwise rotation of the rotating magnetic field. As the rotation speed of rotating magnetic field to n1, the beginning of the rotor conductors is static, it will be cutting the rotor conductors in the stator rotating magnetic field induction electromotive force generated(electromotive force induced by the direction of right-hand rule to determine). Since the derivation conductor ring at both ends by a short circuit shorted, the role of EMF in the sensor, the rotor conductors and inductive electromotive force will produce basically the same as the direction of the induced current. Rotor stator current-carrying conductor in a magnetic field by the electromagnetic force (the direction of force is determined by left-handed set). Electromagnetic force on the rotor axis electromagnetic torque, rotor-driven rotating magnetic field along the direction of rotation.Through this analysis can be summed up as the motor working principle: When the three-phase motor stator windings (the difference between the electrical angle of 120 degrees), access to symmetrical three-phase alternating current will produce a rotating magnetic field, the rotating magnetic field cutting rotor windings, which in rotor windings produce induced current (rotor winding path is closed), current-carrying conductors in the rotor stator rotating magnetic field will produce under the electromagnetic force, which formed in the motor electromagnetic torque shaft, rotary drive motor, and motor rotation direction and rotation the same direction as the magnetic field.。