ESDB交流伺服驱动器使用说明书
伺服驱动器使用说明书

伺服驱动器使⽤说明书MMT-直流伺服驱动器使⽤⼿册济南科亚电⼦科技有限公司直流伺服驱动器使⽤说明书⼀、概述:该伺服驱动器采⽤全⽅位保护设计,具有⾼效率传动性能:控制精度⾼、线形度好、运⾏平稳、可靠、响应时间快、采⽤全隔离⽅式控制等特点,尤其在低转速运⾏下有较⾼的扭矩及良好的性能,在某些场合下和交流⽆刷伺服相⽐更能显⽰其优异的特性,并⼴泛应⽤于各种传动机械设备上。
⼆、产品特征:◇PWM控制H桥驱动◇四象限⼯作模式◇全隔离⽅式设计◇线形度好、控制精度⾼◇零点漂移极⼩◇转速闭环反馈电压等级可选◇标准信号接⼝输⼊0--±10V◇开关量换向功能◇零信号时马达锁定功能◇上/下限位保护功能◇使能控制功能◇上/下限速度设定◇输出电流设定功能◇具有过压、过流、过温、输出短路、马达过温、反馈异常等保护及报警功能三、主要技术参数◇控制电源电压AC:110系列:AC :110V±10%220系列:AC :220V±10%◇主电源电压AC:110系列:AC 40----110V220系列:AC50---- 220V◇输出电压DC:110系列:0—130V或其它电压可设定220系列:0—230V或其它电压可设定◇额定输出电流:DC 5A(最⼤输出电流10A)DC 10A(最⼤输出电流15A)DC 20A(最⼤输出电流25A)◇控制精度:0.1%◇输⼊给定信号:0—±10V◇测速反馈电压:7V/1000R 9.5V/1000R13.5V/1000R 20V/1000R可经由PC板内插⽚选定并可接受其它规格订制四、安装环境要求:◇环境温度:-5oC ~ +50oC◇环境湿度:相对湿度≤80RH。
(⽆结露)◇避免有腐蚀⽓体及可燃性⽓体环境下使⽤◇避免有粉尘、可导电粉沫较多的场合◇避免⽔、油及其他液体进⼊驱动器内部◇避免震动或撞击的场合使⽤◇避免通风不良的场合使⽤五、电源输⼊说明该驱动系统分两路电源输⼊:即U1、V1为主电源输⼊,U2、V2为控制电表1注:1、驱动器的主电源(即U1 V1)独⽴供电时,若电源开路时,驱动器会报警(⾯板上的T.F灯亮)待故障排出后,驱动器⾃动回复正常。
交流伺服电机驱动器使用说明书综述
交流伺服电机驱动器使用说明书1.特点●16位CPU+32位DSP三环(位置、速度、电流)全数字化控制●脉冲序列、速度、转矩多种指令及其组合控制●转速、转矩实时动态显示●完善的自诊断保护功能,免维护型产品●交流同步全封闭伺服电机适应各种恶劣环境●体积小、重量轻2.指标●输入电源三相200V -10%~+15% 50/60HZ●控制方法IGBT PWM(正弦波)●反馈增量式编码器(2500P/r)●控制输入伺服-ON 报警清除CW、CCW驱动、静止●指令输入输入电压±10V●控制电源DC12~24V 最大200mA●保护功能OU LU OS OL OH REG OC STCPU错误,DSP错误,系统错误●通讯RS232C●频率特性200Hz或更高(Jm=Jc时)●体积L250 ×W85 ×H205●重量 3.8Kg3.原理见米纳斯驱动器方框图(图1)和控制方框图(图2)4.接线4.1主回路卸下盖板坚固螺丝;取下端子盖板。
用足够线经和连接器尺寸作连接,导线应采用额定温度600C以上的铜体线,装上端子盖板,拧紧盖板螺丝。
螺丝拧紧力矩大于1.2Nm M4或2.0 Nm M5时才可能损坏端子,接地线径为2.0mm2具体见接线图34.2 CN SIG 连接器[具体见接线图4●驱动器和电机之间的电缆长度最大20M●这些线至少要离开主电路接线30cm,不要让这些线与电源进线走一线槽;或让它们捆扎在一起●线经0.18mm2或以上屏蔽双绞线,有足够的耐弯曲力●屏蔽驱动器侧的屏蔽应连接到CN.SIG 连接器的20脚,电机侧应连接到J脚●若电缆长于10M,则编码器电源线+5V、0V应接双线4.3 CN I/F 连接●控制器等周边设备与驱动器之间距离最大为3M●这些线至少和主电路接线相隔30cm ,不要让这些线与电源进线走同一线槽或和它们捆扎在一起●COM+和COM-之间的控制电源(V DC)由用户供给●控制信号输出端子可以接受最大24V或50mA;不要施加超过此限位的电压和电流●若用控制信号直接使继电器动作要象左图所示那样,并联一只二极管到继电器。
伊莱斯ESDD说明书(2017修订)中英文翻译版
交流伺服驱动器说明书
后再次通电。
12 CCW 驱动 FSTP Type1 CCW(逆时针方向)驱动禁止输入端
禁止
子。
FSTP ON :CCW 驱动允许,电机可
以逆时针方向旋转;
FSTP OFF:CCW 驱动禁止,电机禁止 逆时针方向旋转。
注 1:用于机械超限,当开关 OFF 时, CCW 方向转矩保持为 0。
注 2: 可以通过设置参数 PA20=1 屏
z 由于伺服电机流过高频开关电流,因此漏电流相对较大,电机接 地端子必须与伺服驱动器接地端子 PE 连接一起并良好接地。
4
交流伺服驱动器使用手册
z 因为伺服驱动器内部有大容量的电解电容,所以即使切断了电源, 内部电路中仍有高电压。在电源被切断后,最少等待 5 分钟以上, 才能接触驱动器和电机。
z 接通电源后,操作者应与驱动器和电机保持一定的距离。 z 长时间不使用,请将电源切断。 z 本接线图针对 ACM 系列伺服电机。
1.4.2 安装方法
z 水平安装:为避免水、油等液体自电机出线端流入电机内部,请将 电缆出口置于下方。
z 垂直安装:若电机轴朝上安装且附有减速机时,须注意并防止减速 机内的油渍经由电机轴渗入电机内部。
z 电机轴的伸出量需充分,若伸出量不足时将容易使电机运动时产生 振动。
z 安装及拆卸电机时,请勿用榔头敲击电机,否则容易造成电机轴及 编码器损坏。
26 伺 服 报 警 ALM+ Type2 伺服报警输出端子。
输出
ALM ON:伺服驱动器无报警,伺服
报警输出 ON(输出导通);
27
ALM-
ALM OFF:伺服驱动器有报警,伺服
报警输出 OFF(输出截
止)。
28 定 位 完 成 COIN Type2 定位完成输出端子。
Del ASDA A M SC 操作手册 配线
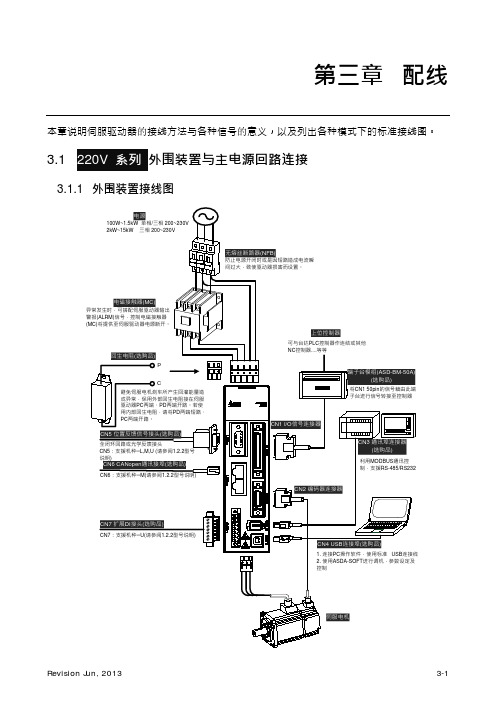
2) R、S、T 及 U、V、W 这六条大电力线不要与其他信号线靠近,尽可能间隔 30 公分(11.8 英寸)以上。
3) 如果编码器 CN2 或是位置反馈信号接头 CN5 联机需要加长时,请使用双绞并附屏蔽接 地的信号线。请不要超过 20 公尺(65.62 英尺),如果要超 过20 公尺,请使用线径大 一倍的信号线,以确保信号不会衰减太多。关于 20 公尺线长的编码器配线规格,请使 用芯线尺寸 AWG26,并符合 UL 2464 规范的金属编织双绞屏蔽线(Metal braided shield twisted-pair cable)。
电磁接触器(MC) 异常发生时,可搭配伺服驱动器输出 警报(ALRM)信号,控制电磁接触器 (MC)将提供至伺服驱动器电源断开。
回生电阻(选购品) P
C 避免伺服电机刹车所产生回灌能量造 成异常,保用外部回生电阻接在伺服 驱动器PC两端、PD两端开路。若使 用内部回生电阻,请将PD两端短路、 PC两端开路。
ECMA-C△13304 (3000W)
ECMA-E△1820S (2000W)
ECMA-E△1830S (3000W)
ECMA-E△1835S (3500W) ECMA-F△1830S (3000W)
D
ECMA-F△1845S (4500W)
ECMA-F118553 (5500W)
Revision Jun, 2013
编码器引出线
驱动器CN2
此端视图
1 蓝 T+
4 蓝/黑
T-
7 红/红白 DC+5V
伺服驱动器中文说明书
1.系统描述...................................................................................................................................- 3 -1.1系统布局图.......................................................................................................................................................- 4 -1.2基本原理...........................................................................................................................................................- 5 -1.3设备说明...........................................................................................................................................................- 6 -1.3.1电动缸DEMxB...........................................................................................................................................- 6 -1.3.2接线盒和电缆..........................................................................................................................................- 8 -1.3.3ACV9BR伺服驱动器...............................................................................................................................- 10 -2.技术规格....................................................................................................................................- 16 -2.1电动缸特性.....................................................................................................................................................- 16 -2.2伺服驱动器的技术特性.................................................................................................................................- 18 -2.3附属设备的技术规格.....................................................................................................................................- 20 -2.3.1主电源变压器........................................................................................................................................- 20 -2.3.2再生电阻RRC.........................................................................................................................................- 20 -2.3.3外部过滤器EFBR...................................................................................................................................- 21 -3.安装和接线.............................................................................................................................- 22 -3.1电动缸在塞棒机构上的安装.........................................................................................................................- 22 -3.1.1塞棒机构的准备....................................................................................................................................- 22 -3.1.1.1 塞棒机构固定件的图纸.....................................................................................................................- 22 -3.1.1.2 DEM电动缸在塞棒机构上的正确安装..............................................................................................- 23 -3.1.1.3塞棒机构间隙和阻力的检查..............................................................................................................- 24 -3.1.2电动缸的安装........................................................................................................................................- 26 -3.1.3塞棒的安装............................................................................................................................................- 27 -3.1.4隔热保护................................................................................................................................................- 28 -3.2.1接线盒JB9BR的安装说明.....................................................................................................................- 30 -3.2.2电缆说明................................................................................................................................................- 30 -3.2.3接线推荐规范和CE标准.......................................................................................................................- 32 -3.2.3.1 屏蔽线的接地.....................................................................................................................................- 32 -3.2.3.2 内部金属导体之间的连接.................................................................................................................- 32 -3.2.3.3 接线盒内的电缆连接.........................................................................................................................- 33 -3.2.3.4 驱动器侧的电缆连接.........................................................................................................................- 34 -3.2.4热区电缆的连接....................................................................................................................................- 35 -3.3驱动器ACV9BR的安装和接线.......................................................................................................................- 36 -3.3.1尺寸........................................................................................................................................................- 36 -3.3.2安装、定位和冷却................................................................................................................................- 37 -3.3.3电源的连接............................................................................................................................................- 39 -4.操作........................................................................................................................................- 40 -4.1手动模式.........................................................................................................................................................- 40 -4.2远程工作模式.................................................................................................................................................- 41 -4.3自动模式.........................................................................................................................................................- 41 -4.4塞棒关闭和安全装置.....................................................................................................................................- 42 -4.4.1塞棒关闭................................................................................................................................................- 42 -4.4.2断开电机电源(可选项).....................................................................................................................- 42 -4.5运行故障的处理.............................................................................................................................................- 43 -5.维护........................................................................................................................................- 44 -5.1检查周期.........................................................................................................................................................- 44 -5.2电动缸的检查和维护.....................................................................................................................................- 45 -5.3推荐的备件.....................................................................................................................................................- 49 -5.4伺服驱动器的故障代码.................................................................................................................................- 53 -5.5故障的数字输出代码.....................................................................................................................................- 57 -5.6驱动器复位和状态显示.................................................................................................................................- 58 -5.7没有报警显示时的故障排除.........................................................................................................................- 59 -6.辅助设备.................................................................................................................................- 61 -6.1DEM系列电动缸的测试台..............................................................................................................................- 61 -6.2塞棒机构MQS..................................................................................................................................................- 61 -1.系统描述SERT的塞棒执行器系统用于控制塞棒和塞棒机构的位置,以控制流入结晶器的钢水的流量。
东元ESDA系列伺服驱动器说明书
751:750W 102:1KW
馬達系列 CB:CB系列 MB:MB系列 Frame尺寸 5:54mm 7:76mm 8:87mm
3:130mm
CB系列 MB系列
馬達系列 CC:CC系列 Frame尺寸 6:60mm 8:80mm
第1頁
東元精電
伺服驅動器與伺服馬達搭配對照表
伺服驅動器機種 名稱
伺服馬達 機種名稱
2、馬達:MB系列馬達附軍用接頭(4 Pins及9 Pins)各一組; MB剎車馬達附軍用接頭(9 Pins)兩組。 • 檢查驅動器機種與馬達是否與訂購的機種相同:
伺服驅動器機種確認
ESDB 15 B - CB 301 C 2 7F
ESDB15B-CB301C27F
伺服驅動器系列 伺服驅動器電流容量
8CC751G (CC系列750W)
8CC102G (CC系列1KW)
ESDB40C
3MB150B (MB系列1. 5KW)
3MB150C (MB系列1. 5KW)
3MB200B (MB系列2KW)
第2頁
東元精電
驅動器尺寸圖 *ESDB15B尺寸圖
*ESDB20B尺寸圖
第3頁
東元精電
*TSDB30B尺寸圖 TSDB40B尺寸圖
ESDB15B尺寸圖 ESDB20B尺寸圖 ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ 3 ESDB30C,ESDB40C尺寸圖 ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ ‧ ‧ 4
驅動器安裝方法
安裝場所 環境條件 安裝方向及間隔 ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ 5
異常警報一覽表 ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ 37~38
东能交流伺服驱动器基础技术手册

交流全数字伺服驱动器EPS系列基础技术手册z非常感谢您选购EPS系列交流伺服驱动器z在您使用驱动器之前,请仔细阅读本技术手册,按照手册上的规范操作·安全注意事项·· 安全注意事项 ·(使用前请仔细阅读)在产品的安装、运行、维护和检查前请仔细阅读本技术手册,在熟悉了有关设备的知识、安全信息和全部注意事项后再使用本产品。
请将此技术手册妥善保存,以备随时查阅。
如果您不能解决产品出现的问题,请及时联系我们。
由于产品的改进,手册内容可能变更,恕不另行通知。
在未得我公司授权下,用户对产品的改动我公司将不承担任何责任,产品的保修将因此作废。
注意下列警告,以免伤害人员、防止器件损坏。
下面的“危险”和“警告”符号是按照其事故危险的程度标出的危险指示一个潜在的危险情况,如果使用不当,会产生危险状况,有导致人员重伤甚至死亡的可能。
警告指示一个潜在的危险情况,如果使用不当,可能会产生危险状况,有导致人员受到中等程度伤害或轻伤的可能,或者发生物件损坏。
下列符号表示哪些是禁止的操作,哪些是必须遵守的。
·1··安全注意事项··2·目 录目录第一章功能和构成 (1)1.1EPS系列驱动器技术规格 (1)1.2EPS系列驱动器功能 (2)1.3EPS系列驱动器命名规则 (3)1.4EPS2系列驱动器外形尺寸 (4)1.5EPS2系列驱动器适配电机 (7)1.6各部分名称 (8)第二章安装 (9)2.1环境条件 (9)2.2驱动器安装场合 (9)2.3安装方向和间隔 (10)2.4电机的安装 (11)2.5伺服驱动器安装示意图 (11)2.6电缆应力 (12)第三章接线 (13)3.1伺服驱动器与外围设备的连接及构成 (13)3.2标准接线 (14)3.3端子功能 (17)3.4编码器信号端子CN3 (22)3.5I/O接口原理 (24)1.开关量输入接口 (24)2.开关量输出接口 (24)3.脉冲量输入接口 (25)4.伺服驱动器光电编码器输入接口 (25)5.长线驱动器(差分输出)输出接口 (26)·1·目 录3.6电源系统电路 (26)第四章参数 (28)4.1参数功能 (28)第五章监控与操作 (40)5.1面板操作 (40)5.2监视方式(DISP) (41)5.3参数设置(SET-P) (44)5.4参数管理(EEPOP) (44)5.5速度试运行 (46)第六章报警与处理 (48)6.1驱动器报警 (48)6.2报警处理 (49)第七章伺服电机 (54)7.1型号命名 (54)7.2电机安装尺寸 (57)附录 (60)·2·第一章 功能和构成·1·第一章 功能和构成1.1 EPS 系列驱动器技术规格表1.1 驱动器技术规格控制回路电源单相AC220V-15~+10% 50/60Hz主回路电源三/单相AC220V -15~+10% 50/60Hz环境温度工作:0~55 ℃存贮:-20℃~80℃ 湿度 小于90%(无结露)振动小于0.5G(4.9m/S 2),10~60Hz (非连续运行)控制方式 IGBT PWM 正弦波控制控制模式①位置控制 ②速度控制 ③转矩控制 ④位置/速度控制⑤位置/转矩控制⑥速度/转矩控制⑦内部位置控制⑧内部速度控制⑨内部转矩控制⑩试运行控制控制输入① 伺服使能 ②报警清除 ③位置偏差清零 ④指令脉冲禁止CCW ⑤驱动禁止 CW ⑥驱动禁止 ⑦控制方式选择 ⑧零速箝位控制输出①伺服准备好 ②伺服报警 ③机械制动释放 ④位置/速度到达 ⑤零速检出 ⑥转矩限制中 Z ⑦相输出 编码器反馈 2500p/r ,15线增量型,差分输出 500 p/r ,15线增量型,差分输出 通讯方式 RS232 RS485 ①② 显示与操作 ①5位LED 显示 4②个按键 制动方式 通过内置/外接制动电阻能耗制动 冷却方式 风冷(热传导膜具、高速强冷风扇) 适配电机 可通过参数设置适配不同型号电机 功率范围≤5KW第一章 功能和构成·2·1.2 EPS 系列驱动器功能表1.2 驱动器功能一览表控制功能位置控制外部输入脉冲形式脉冲/方向,CW/CCW ,A/B 两相最大指令脉冲频率 500Kpps (差分输入)电子齿轮 1/1800~1800(推荐:1/50~50)脉冲输入指令禁止信号位有效时,指令脉冲输入被禁止;可通过参数屏蔽此信号内部位置指令 16种位置设定 速度控制外部速度指令 0~±10V DC零速钳位 通过此功能使得速度保持为0 速度控制范围 1~3000 内部速度指令4种速度设定 转矩控制外部转矩指令 0~±10V DC 内部转矩指令4种转矩设定转矩控制范围外部转矩指令:0~300% 内部转矩指令:0~300%驱动禁止 当CCWL/CWL 信号有效时,电机在CCW/CW 方向输出零速保持力矩 监视功能转速、当前位置、指令脉冲积累、位置偏差、电机转矩、电机电流、转子位置、指令脉冲频率、运行状态、输入输出端子信号等保护功能 过压、欠压、过流、过速、过载、Z 脉冲丢失、编码器出错、EEPROM 错误、位置超差等报警功能 工作异常时输出报警号,同时5个LED 小数点位闪烁 信号显示 在显示部分显示外部输入、输出信号的ON/OFF 状态 增益调整 在电机运行或停止时改变增益以调节驱动器性能 报警记录可记忆包括当前报警在内的4个报警记录第一章 功能和构成·3·1.3 EPS 系列驱动器命名规则EPS □--- □ □ □ □ □ □□ (□□)专用机型电源方式{首数代表电压:2为220V ,3为380V末数代表相数:1为单相,3为三相 {1:2500p/r 2:500p/r 3:省线式} 连接方式{L:螺丝固定 }功率值{040→400W 075→750W …. 软件版本{A →通用 B →通用BT 通用 W 袜机} 2为型材散热器)例如:EPS2—TA150L123(H)注:通用A 和通用B 的区别:编码器信号分周输出脉波信号的功能不同,通用A 分频比只能取1-255整除倍脉波信号数,通用B 可以任意取输出脉波信号数。
ESTUN-EDB交流伺服驱动器手册2.0V
键 QK QL
16 16 22 22 4 4 4 4
D1004650 B06A001
W
5 5 6 6
T
5 5 6 6
U
3 3 3.5 3.5
153(193) 123(163) 173(213) 143(183) 191(234) 156(199) 211(254) 176(219)
(注)括号内的数值表示的是带制动器电机的尺寸。
EDB系列交流伺服随机手册
EDB系列交流伺服随机手册
使用前的注意事项
电源电压是220V。 请使用220V的电源电压。 ■ 请不要将伺服电机直接与市网电源连接。 请不要将伺服电机直接与市网电源连接,这样会使电机损坏。伺服电机没有伺 服驱动器驱动,不能旋转。 ■ 通电时不要进行插座的拔、插动作。 请断电之后,再进行插座的拔、插。 ■ 请在断电5分钟后再进行检查作业。 即使断电,在伺服驱动器的电容内还存储有电量,为了防止触电,请确认 CHARGE灯灭了之后,再进行检查操作。 ■ 与其它设备的安装间隔请选择在10mm以上。 与其它设备的设置间隔,在横向为10mm以上,纵向为50mm以上进行安装。伺服 驱动器发热,尽可能按有利散热的布局安装,并且安装在不受结露、振动、冲击 影响的环境中。 ■ 请进行抗干扰处理和接地。 信号线上如有干扰,容易产生振动和运行不正常。 请严格遵守如下规定: 1.请分离强电线和弱电线。 2.请尽量缩短接线距离。 3.伺服电机、伺服驱动器的安装,请采取一点接地,接地阻抗100Ω以下。 4.电机和伺服驱动器中间绝对不要使用电源输入干扰滤波器。 ■ 请在以下条件下进行耐压试验。 5.电压:AC1500Vrms,1分钟 6.切断电流:100mA 7.频率:50/60Hz 8.加压点:L1、L2、L3接头和FG 接头之间(请紧固端子间的连接) ■ 漏电保护器,请使用快速反应型。 请使用快速反应型漏电保护器或指定PWM逆变器使用的漏电保护器,不能使用延 时型。 ■ 请不要连续地在负加载情况下运行。 不能在负载转动电机、由再生/制动器制动的情况下连续运行。伺服驱动器的 再生制动能力限定在使伺服电机停止的制动的短时间工作状态。 ■ 请不要用电源的开/断运行伺服电机。 电源频繁地开/断将导致内部元件迅速老化,请用指令信号控制伺服电机的运 行。
EPS-BS 系列 伺服驱动器 应用技术手册说明书

AC伺服驱动器EPS-BS系列 应用技术手册(V1.4) Generated by Foxit PDF Creator © Foxit Software For evaluation only.安全注意事项本节就产品到货时的确认、保管、搬运、安装、接线、运行、检查、废弃等用户必须遵守的重要事项进行说明。
危险⏹输入电源。
本驱动器的输入电源是AC220V。
⏹安装在机械上开始运行时,请事先将电机置于可随时紧急停止的状态。
否则会导致人员受伤、机械损坏。
⏹在通电状态下,请务必安装好电源端子排的外罩。
否则会导致触电。
⏹关闭电源后或进行耐电压试验后,在充电指示灯亮灯期间,请勿触摸电源端子。
否则会因残留电压而导致触电。
⏹请按与产品相应的用户手册中说明的步骤、指示进行试运行。
伺服电机安装在机械的状态下,如果发生操作错误,则不仅会造成机械损坏,有时还可能导致人身伤害事故。
⏹请绝对不要对本产品进行改造,非指定人员请勿进行设置、拆卸或修理。
否则会导致人员受伤、机械损坏或火灾。
⏹请在机械侧设置停止装置以确保安全。
带制动器的伺服电机的保持制动器不是用于确保安全的停止装置。
否则会导致受伤。
⏹请务必将伺服驱动器的接地端子与接地极连接(电源输入伺服驱动器的接地电阻为100Ω以下)。
否则会导致触电或火灾。
保管搬运注意⏹请勿保管、设置在下述环境中。
否则会导致火灾、触电或机器损坏。
阳光直射的场所使用环境温度超过保管、设置温度条件的场所相对湿度超过保管、设置湿度条件的场所有腐蚀性气体、可燃性气体的场所尘土、灰尘、盐分及金属粉末较多的场所易溅上水、油及药品等的场所振动或冲击会传到主体的场所⏹请勿握住电缆、电机轴或检出器进行搬运。
否则会导致受伤或故障。
⏹请勿堵塞吸气口与排气口。
也不要使异物进入产品内部。
否则会因内部元件老化而导致故障或火灾。
⏹请务必遵守安装方向的要求。
否则会导致故障。
⏹安装时,请确保伺服驱动器与控制柜内表面以及其他机器之间具有规定的间隔。
交流伺服驱动器说明书
交流伺服驱动器用户手册2

1.SA系列交流伺服简介SA系列数字式交流永磁同步电机伺服驱动器(以下简称伺服驱动器)采用了国际上先进的DSP 芯片(数字信号处理器)对电机的位置、转速、转矩进行数字化智能控制。
该伺服驱动器不仅可靠性高、性能优异,而且可以通过设定用户参数,对系统进行任意组态。
例如:可以组成位置控制系统、速度控制系统、转矩控制系统等。
1.1SA系列交流伺服的使用方法1.1.1 速度控制方式速度控制方式的伺服驱动器标准使用方法,如下图所示:如上图所示,在上位机侧组成位置控制环。
在上位机中,进行位置指令和位置反馈的比较操作,即进行位置环调节的计算,输出模拟速度指令给伺服驱动器。
伺服驱动器接收上位机的模拟速度指令,进行速度环控制。
在这种控制方式下,上位机的位置反馈可以是伺服驱动器输出的电机编码器信号,也可以是安装在机械上的直线位置测量信号(例如光栅尺、磁栅尺、感应同步器等),即可以组成位置全闭环系统。
1.1.2 位置控制方式位置控制方式的伺服驱动器标准使用方法,如下图所示:上位机进行完定位及插补计算后,将位置指令以脉冲串的形式传送给伺服驱动器,由伺服驱动器进行位置指令和位置反馈的比较操作,即进行位置环调节的计算。
这种形式的伺服驱动器包含了位置控制环。
作为位置指令的脉冲串,可以是下面的任一种,在伺服驱动器侧可以通过设定用户常数进行选择:1)符号位+脉冲列2)具有90°相位差的两相脉冲序列3)正转脉冲序列+ 反转脉冲序列1.2 SA系列交流伺服驱动器的内置功能SA系列伺服控制器的内置功能说明如下:1)控制方式转换通过数字操作器设定用户常数,可以使伺服驱动器工作于位置控制方式或速度控制方式。
为了防止误操作,在伺服电机运行时(伺服使能状态),不能改变控制方式。
2)再生能量处理功能伺服驱动器内置再生能量处理电路和再生制动电阻。
当伺服电机起制动频繁或负载惯量过大时,则必须使用外置再生制动电阻。
3)能耗制动功能在伺服驱动器断电、伺服驱动器故障时,电机处于不受控状态。
PSD01交流伺服驱动器使用说明书
4
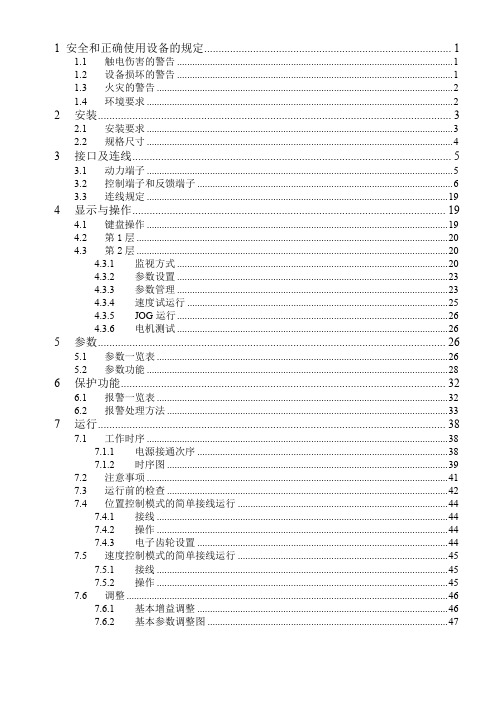
显示与操作............................................................................... 19
2 3
安装........................................................................................................................... 3
2.1 2.2 3.1 3.2 3.3
接口及连线............................................................................................................... 5
1 安全和正确使用设备的规定 ...................................................................................... 1
1.1 1.2 1.3 1.4 触电伤害的警告 ............................................................................................................. 1 设备损坏的警告 ............................................................................................................. 1 火灾的警告 ..........................................................
东能交流伺服驱动器基础技术手册
交流全数字伺服驱动器EPS系列基础技术手册z非常感谢您选购EPS系列交流伺服驱动器z在您使用驱动器之前,请仔细阅读本技术手册,按照手册上的规范操作·安全注意事项·· 安全注意事项 ·(使用前请仔细阅读)在产品的安装、运行、维护和检查前请仔细阅读本技术手册,在熟悉了有关设备的知识、安全信息和全部注意事项后再使用本产品。
请将此技术手册妥善保存,以备随时查阅。
如果您不能解决产品出现的问题,请及时联系我们。
由于产品的改进,手册内容可能变更,恕不另行通知。
在未得我公司授权下,用户对产品的改动我公司将不承担任何责任,产品的保修将因此作废。
注意下列警告,以免伤害人员、防止器件损坏。
下面的“危险”和“警告”符号是按照其事故危险的程度标出的危险指示一个潜在的危险情况,如果使用不当,会产生危险状况,有导致人员重伤甚至死亡的可能。
警告指示一个潜在的危险情况,如果使用不当,可能会产生危险状况,有导致人员受到中等程度伤害或轻伤的可能,或者发生物件损坏。
下列符号表示哪些是禁止的操作,哪些是必须遵守的。
·1··安全注意事项··2·目 录目录第一章功能和构成 (1)1.1EPS系列驱动器技术规格 (1)1.2EPS系列驱动器功能 (2)1.3EPS系列驱动器命名规则 (3)1.4EPS2系列驱动器外形尺寸 (4)1.5EPS2系列驱动器适配电机 (7)1.6各部分名称 (8)第二章安装 (9)2.1环境条件 (9)2.2驱动器安装场合 (9)2.3安装方向和间隔 (10)2.4电机的安装 (11)2.5伺服驱动器安装示意图 (11)2.6电缆应力 (12)第三章接线 (13)3.1伺服驱动器与外围设备的连接及构成 (13)3.2标准接线 (14)3.3端子功能 (17)3.4编码器信号端子CN3 (22)3.5I/O接口原理 (24)1.开关量输入接口 (24)2.开关量输出接口 (24)3.脉冲量输入接口 (25)4.伺服驱动器光电编码器输入接口 (25)5.长线驱动器(差分输出)输出接口 (26)·1·目 录3.6电源系统电路 (26)第四章参数 (28)4.1参数功能 (28)第五章监控与操作 (40)5.1面板操作 (40)5.2监视方式(DISP) (41)5.3参数设置(SET-P) (44)5.4参数管理(EEPOP) (44)5.5速度试运行 (46)第六章报警与处理 (48)6.1驱动器报警 (48)6.2报警处理 (49)第七章伺服电机 (54)7.1型号命名 (54)7.2电机安装尺寸 (57)附录 (60)·2·第一章 功能和构成·1·第一章 功能和构成1.1 EPS 系列驱动器技术规格表1.1 驱动器技术规格控制回路电源单相AC220V-15~+10% 50/60Hz主回路电源三/单相AC220V -15~+10% 50/60Hz环境温度工作:0~55 ℃存贮:-20℃~80℃ 湿度 小于90%(无结露)振动小于0.5G(4.9m/S 2),10~60Hz (非连续运行)控制方式 IGBT PWM 正弦波控制控制模式①位置控制 ②速度控制 ③转矩控制 ④位置/速度控制⑤位置/转矩控制⑥速度/转矩控制⑦内部位置控制⑧内部速度控制⑨内部转矩控制⑩试运行控制控制输入① 伺服使能 ②报警清除 ③位置偏差清零 ④指令脉冲禁止CCW ⑤驱动禁止 CW ⑥驱动禁止 ⑦控制方式选择 ⑧零速箝位控制输出①伺服准备好 ②伺服报警 ③机械制动释放 ④位置/速度到达 ⑤零速检出 ⑥转矩限制中 Z ⑦相输出 编码器反馈 2500p/r ,15线增量型,差分输出 500 p/r ,15线增量型,差分输出 通讯方式 RS232 RS485 ①② 显示与操作 ①5位LED 显示 4②个按键 制动方式 通过内置/外接制动电阻能耗制动 冷却方式 风冷(热传导膜具、高速强冷风扇) 适配电机 可通过参数设置适配不同型号电机 功率范围≤5KW第一章 功能和构成·2·1.2 EPS 系列驱动器功能表1.2 驱动器功能一览表控制功能位置控制外部输入脉冲形式脉冲/方向,CW/CCW ,A/B 两相最大指令脉冲频率 500Kpps (差分输入)电子齿轮 1/1800~1800(推荐:1/50~50)脉冲输入指令禁止信号位有效时,指令脉冲输入被禁止;可通过参数屏蔽此信号内部位置指令 16种位置设定 速度控制外部速度指令 0~±10V DC零速钳位 通过此功能使得速度保持为0 速度控制范围 1~3000 内部速度指令4种速度设定 转矩控制外部转矩指令 0~±10V DC 内部转矩指令4种转矩设定转矩控制范围外部转矩指令:0~300% 内部转矩指令:0~300%驱动禁止 当CCWL/CWL 信号有效时,电机在CCW/CW 方向输出零速保持力矩 监视功能转速、当前位置、指令脉冲积累、位置偏差、电机转矩、电机电流、转子位置、指令脉冲频率、运行状态、输入输出端子信号等保护功能 过压、欠压、过流、过速、过载、Z 脉冲丢失、编码器出错、EEPROM 错误、位置超差等报警功能 工作异常时输出报警号,同时5个LED 小数点位闪烁 信号显示 在显示部分显示外部输入、输出信号的ON/OFF 状态 增益调整 在电机运行或停止时改变增益以调节驱动器性能 报警记录可记忆包括当前报警在内的4个报警记录第一章 功能和构成·3·1.3 EPS 系列驱动器命名规则EPS □--- □ □ □ □ □ □□ (□□)专用机型电源方式{首数代表电压:2为220V ,3为380V末数代表相数:1为单相,3为三相 {1:2500p/r 2:500p/r 3:省线式} 连接方式{L:螺丝固定 }功率值{040→400W 075→750W …. 软件版本{A →通用 B →通用BT 通用 W 袜机} 2为型材散热器)例如:EPS2—TA150L123(H)注:通用A 和通用B 的区别:编码器信号分周输出脉波信号的功能不同,通用A 分频比只能取1-255整除倍脉波信号数,通用B 可以任意取输出脉波信号数。
交流伺服驱动器说明书
交流伺服驱动器使用手册GTAS-30B说明书(印刷版)
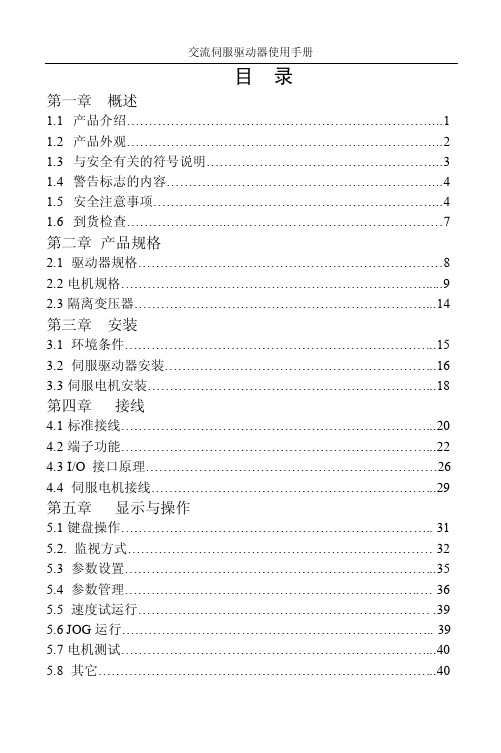
交流伺服驱动器使用手册目录第一章概述1.1产品介绍 (1)1.2产品外观 (2)1.3与安全有关的符号说明 (3)1.4警告标志的内容 (4)1.5安全注意事项 (4)1.6到货检查 (7)第二章产品规格2.1 驱动器规格 (8)2.2电机规格 (9)2.3隔离变压器 (14)第三章安装3.1 环境条件 (15)3.2 伺服驱动器安装 (16)3.3伺服电机安装 (18)第四章接线4.1标准接线 (20)4.2端子功能 (22)4.3 I/O 接口原理 (26)4.4 伺服电机接线 (29)第五章显示与操作5.1键盘操作 (31)5.2. 监视方式 (32)5.3 参数设置 (35)5.4 参数管理 (36)5.5 速度试运行.................................................................. .39 5.6 JOG运行.. (39)5.7电机测试 (40)5.8 其它 (40)目录第六章通电运行6.1 电源的连接 (41)6.2 通电试运行 (43)6.3 参数调整 (45)第七章参数7.1 参数一览表 (48)7.2 参数功能 (50)第八章报警与处理8.1 报警一览表 (59)8.2 报警处理方法 (60)第九章常见问题9.1 常见问题报警.............................................................. ..67 9.2 频繁出现Err-15、Err-30、Err-31、Err-32报警.. (67)9.3 型号代码参数与电机对照表 (68)交流伺服驱动器使用手册第一章概述1.1 产品简介:随着交流伺服技术的成熟稳定,产品性能不断提高,适应工业控制向高速度、高精度、高效率、数字智能化方向发展,同时随着伺服产品性价比的不断提升,伺服控制替代步进控制已成为产业发展趋势。
交流伺服技术已从军工航空航天领域广泛深入地渗透到各行各业,广泛应用于数控机床、纺织机械、轻工机械、网版印刷、包装机械、自动生产线等自动化领域。
ESDB 交流伺服驱动器 使用说明书

TAC交流伺服驱动器ESDB系列使用说明书ESDB使用说明书天津罗升企业有限公司Tianjin Acepillar Co.,ltd目录1.前言..............................................................................................................错误!未定义书签。
1.1开箱.....................................................................................................错误!未定义书签。
1.2使用上注意事项.................................................................................错误!未定义书签。
1.3适用伺服马达.....................................................................................错误!未定义书签。
1.4注意事项.............................................................................................错误!未定义书签。
1.5安装.....................................................................................................错误!未定义书签。
2.面板操作......................................................................................................错误!未定义书签。