CTB GS标准系列驱动器调试方法
超同步 GS伺服主轴驱动器 使用说明书

ctb gs driver 资料编号:zl-10-808-ibcn本产品在改进的同时,资料可能有所变动,恕不另行通知地址:北京市密云县十里堡镇王各庄产业基地电话:010-********传真:010-********24小时全国免费服务电话:400-888-9055ctb technology 经销商北京超同步科技股份有限公司ctb gs driver资料编号:z l-10-808-i b c n beijing ctb technology & stocking co.,ltd.gs driver使用说明书交流伺服主轴驱动器型号:bksc-□□□□gs 400v 级 1.5~160kw (2.5~200kva)请将此使用说明书,交给最终用户,并妥善保存ctb technology 北京超同步科技股份有限公司序 言感谢您惠购北京超同步科技股份有限公司生产的G S 系列伺服驱动器。
G S 系列伺服驱动器是北京超同步科技有限公司研制、开发生产的高品质、多功能、低噪音的交流伺服驱动器。
G S 系列伺服驱动器是交流感应电机(i M)的伺服驱动器,可对普通交流感应电机和变频电机的位置、转速、加速度和输出转矩方便地进行控制,G S 系列伺服驱动器的研制成功为传动控制领域带来了无限生机。
G S 系列伺服驱动器核心采用32位c P U,实现对电机全数字控制。
使交流感应电机具有和同步电机、直流电机一样的调速特性。
是机械制造业最具竞争力的电气传动产品。
GS 系列通用伺服驱动器,是根据自动化领域,针对位置、速度、力矩控制要求而开发,是机床、纺织、塑机、造纸及各种自动化流水线等运动控制领域的首选产品。
在使用GS 系列伺服驱动器之前,请您仔细阅读该手册,以保证正确使用。
错误使用可能造成驱动器运行不正常、发生故障或降低使用寿命,乃至发生人身伤害事故。
因此使用前应反复阅读本说明书,严格按说明使用。
本手册为随机发送的附件,务必请您使用后妥善保管,以备今后对驱动器进行检修和维护时使用。
CTB2-G操作手册(中文)扭力扳手
数字式增紧扭力扳手型号 CTB2-G操作手册致用户:请在使用之前仔细阅读本说明书,请按说明书要求正确使用此产品。
若有任何问题,请与东日公司认可的销售店或东日制作所联系。
安全注意事项为了安全操作该仪器,请在使用前仔细阅读本说明书。
如果有问题,请与销售商或东日公司联系。
请保管好此说明书。
信息提示语信息提示语是安全维护人员必须知道的名称。
信息提示语按照人员工作时的安全程度分为“危险”、“警告”和“注意”。
安全注意标识有以下几种解释:请使用本操作手册中记载的专用充电器和蓄电池。
——请勿使用本操作手册规定之外的充电器和蓄电池。
请正确充电。
请使用本操作手册中指定的充电器。
——避免引起异常发热或导致失火。
请勿在低于0℃或高于40℃的环境下对电池进行充电。
——避免电池爆裂或引起失火。
请将电池置于通风的地方进行充电。
请勿用衣服等物品遮盖正在充电的充电器或电池。
——避免电池爆裂或引起失火。
请在充电器不使用时,将插头从电源插座中拔离,以防发生触电和失火。
请注意工具使用场所的周围情况:请勿在雨中或湿润的环境中使用此扭力扳手、充电器和电池。
——避免发生触电或引起失火。
保持良好的工作环境,避免发生意外。
——请勿在光线不足的地方使用此扭力扳手,避免发生意外。
请勿在有易燃液体或气体的环境下使用或充电。
——避免发生爆炸或引起失火。
、请勿使用本操作手册指定之外的附件,这是最基本的要求。
——避免发生爆炸或造成其他严重事故。
请勿将电池投入火中。
——避免电池爆裂和有害物质的泄漏。
请确认扳手头部换向拨片的状态,确保棘轮正常工作。
(扳手标配头部:QH系列)——避免发生意外和伤害,或功能失效。
请勿使用延长手柄进行操作。
——避免损坏扳手本体或导致精度不良。
注意① 请保持工作场所的整洁。
在脏乱的工作环境中工作容易造成意外。
② 请勿让小孩接近工具使用场所。
请勿让未经培训的人员操作此扳手,避免发生意外。
③ 若工具不被使用时,请放置在安全的地方。
应将工具放置在不易被小孩接触到的干燥的地方,避免发生意外。
超同步 GS伺服主轴驱动器 使用说明书
ctb gs driver 资料编号:zl-10-808-ibcn本产品在改进的同时,资料可能有所变动,恕不另行通知地址:北京市密云县十里堡镇王各庄产业基地电话:010-********传真:010-********24小时全国免费服务电话:400-888-9055ctb technology 经销商北京超同步科技股份有限公司ctb gs driver资料编号:z l-10-808-i b c n beijing ctb technology & stocking co.,ltd.gs driver使用说明书交流伺服主轴驱动器型号:bksc-□□□□gs 400v 级 1.5~160kw (2.5~200kva)请将此使用说明书,交给最终用户,并妥善保存ctb technology 北京超同步科技股份有限公司序 言感谢您惠购北京超同步科技股份有限公司生产的G S 系列伺服驱动器。
G S 系列伺服驱动器是北京超同步科技有限公司研制、开发生产的高品质、多功能、低噪音的交流伺服驱动器。
G S 系列伺服驱动器是交流感应电机(i M)的伺服驱动器,可对普通交流感应电机和变频电机的位置、转速、加速度和输出转矩方便地进行控制,G S 系列伺服驱动器的研制成功为传动控制领域带来了无限生机。
G S 系列伺服驱动器核心采用32位c P U,实现对电机全数字控制。
使交流感应电机具有和同步电机、直流电机一样的调速特性。
是机械制造业最具竞争力的电气传动产品。
GS 系列通用伺服驱动器,是根据自动化领域,针对位置、速度、力矩控制要求而开发,是机床、纺织、塑机、造纸及各种自动化流水线等运动控制领域的首选产品。
在使用GS 系列伺服驱动器之前,请您仔细阅读该手册,以保证正确使用。
错误使用可能造成驱动器运行不正常、发生故障或降低使用寿命,乃至发生人身伤害事故。
因此使用前应反复阅读本说明书,严格按说明使用。
本手册为随机发送的附件,务必请您使用后妥善保管,以备今后对驱动器进行检修和维护时使用。
CTB产品维修手册

CTB产品维修手册主轴电机光电编码器拆卸和安装方法一.拆卸和安装所需工具和零件。
十字螺丝刀1把,M5、M4、M3、M2内六方扳手各1把,M5X35内六方螺钉1 件。
二.拆卸方法和步骤1.拆下主轴电机后端的电机风扇罩和编码器密封盖。
2.拆开电机接线盒,拆下编码器接口板,拔下与编码器连接的电缆。
3.用M2的扳手拆下光电编码器两边的M3X8螺钉,注意保存螺钉的平垫和弹簧垫。
4.用M3扳手拆下编码器中间M4X30的螺钉。
5.用M5X35的螺钉从后端旋进编码器的空心轴,直至将编码器顶出,拆卸工作完成。
三.安装方法和步骤1.将新的编码器对准电机尾部的锥轴,轻轻压下。
2.用M3扳手将M4X30的螺钉,拧进编码器空心轴并且拧紧,以保证主轴电机运转时编码器轴与电机轴同步旋转。
3.用M2扳手将M3X8的螺钉固定码盘两侧弹性安装片,注意加装弹簧垫和平垫,防止松动。
4.插上与编码器连接的电缆,固定好接口电路板。
5.用M3扳手将密封盖安装好,注意重新装好密封圈。
6.用M5扳手将电机风扇罩和接线盒装好,码盘安装过程完成。
7.在主轴驱动器上重新调整主轴准停位臵。
调试主轴电机磁码盘的方法(使用MENC3型接口板)1.将控制器断电,先拆开电机的接线盒,再将编码器接线盒的四个螺钉打开,此时能看到编码器电路板。
(如左下脚图所示)2.将电机后端风机罩取下,再用内六角扳手将磁码盘密封盖取下,此时能看到码盘和编码器的磁检测头。
3.用0.15mm或0.20mm的塞尺放在检测头与磁盘之间,使塞尺尽量与检测头和码盘紧密接触,并保持平行。
4.插好编码器电缆,给驱动器上电,但不要让电机运转。
5.A相的调整:将万用表调到直流2V电压档,将红、黑表笔分别接到A+和A—上,调节对应A相的电位器P1,直至使A+和A—之间的电压为0V即可。
6.B相的调整:将万用表调到直流2V电压档,将红、黑表笔分别接到B+和B—,调节对应B相的电位器P2,直至使B+和B—之间的电压为0V即可。
GS200交流伺服驱动器操作手册(阿启蒙通用伺服)
安全注意事项
(使用前务必阅读)
安装、使用、维修、检查之前必须仔细阅读本操作手册、伺服电机技术资料及相关资料。 请在对设备情况、安全信息和注意事项都清楚的情况下再进行使用。
与安全相关的符号说明
错误使用时,会导致危险发生,可能会引起人身伤亡。
错误使用时,会引起危险发生,可能导致人身轻度或中度伤害或设备损坏。
操 作 手 册
GS200 系列
交流伺服驱动器
感谢您使用本驱动器, 本手册仅提供 G S 2 0 0 系列交流伺服驱动器及其适配电机相关信 息。内容包括: � � � � 伺服驱动器与伺服电机的安装及检查 伺服驱动器面板操作说明 参数说明 故障说明 本使用说明书适合下列使用者参考 � � � 安装或配线人员 试转调机人员 维护与检查人员 在使用之前,请您仔细详读本手册以确保使用上的正确。此外,请将它妥善放置在安全 的地点以便随时查阅。下列为您在未读完本手册时,务必遵守事项: � � � � � 安装的环境必须没有水汽、腐蚀性气体及可燃性气体。 接线时禁止将三相电源接至电机 U、V、W 的接头,一旦接错将损坏驱动器和电机。 接地过程必须确实实施,接地时必须遵照国家现行相关电工法规的规定实行。 在通电时,请勿拆解驱动器、电机或更改配线。 在通电运行时,请勿接触散热片,以免烫伤。 如果您在使用上仍有问题,请咨询经销商或本公司客服中心。
禁止
� � � 禁止接触伺服驱动器及伺服电机内部、否则可能会造成触电。 电源启动后,禁止拆下驱动器面板,否则可能会触电。 电源关闭 10 分钟内,不得接触接线端子,残余电压可能造成触电。
� � � �
不得拆开伺服电机,否则可能造成触电或人员受伤。 不得在开启电源的情况下改变配线,否则可能造成触电或人员受伤。 只有合格的电机专业人员才可安装、配线及修理保养伺服驱动器及伺服电机。 主电路配线
新代 超同步GS系列调试手册

S Y N T E C北京超同步G S系列调试手册日期:2010、8、30版本:Ver 1.2目录一、驱动器与新代控制器的连接 (3)1.1基本接口的连接 (3)1.2与新代基本功能点的连接 (4)1.3驱动器各针脚的定义 (5)二、基本I/O点功能的介绍 (6)2.1、功能列表 (6)2.2、几个关键点的优先级关系 (8)三、基本参数设定 (9)四、按功能选用I/O、调整参数 (13)4.1模拟量控制 (13)4.2脉冲控制 (14)4.3准停 (14)五、按步骤调试伺服 (15)5.1步骤一:驱动器与电机规格检查 (15)5.1.1调整电机参数 (15)5.1.2调整驱动器参数 (16)5.2步骤二:配电 (16)5.2.1主回路连线的确认 (16)5.2.2控制回路接线确认 (17)5.3步骤三试运行 (17)5.3.1电机及驱动器参数确认 (17)5.3.2空载试运行 (17)5.3.3带载运行 (18)六、警报一览表 (19)附表 (22)一、 驱动器与新代控制器的连接1.1基本接口的连接1.2与新代基本功能点的连接(以脉冲控制为例)引脚定义引脚定义轴卡4新代系统4+-+-+-+-+-+-+-+-5151014913+-+-4235491627381200011011229111312132018111910262316123主轴脉冲位置方式主轴脉冲速度方式主轴准停161234驱动器故障常开驱动器故障常闭驱动器就绪准停到位刹车电阻380电机线编码器线11+-+-+-磁环超同步1.3驱动器各针脚的定义注:1、若驱动器为NT型则SV、SC 24v电源为内供,若为EXT型则需外供,请注意查看驱动器上的铭牌。
二、 基本I/O点功能的介绍2.1、功能列表端口种类针脚名称功能信号标准T0通讯与计算机通讯RS232T1 模拟量输入12/14 GND/FC 模拟量输入公共端0V3 FI 0-10V、0-5V、4-20mA可选择模拟量输入阻抗20千欧T2 编码器脉冲输入12/13 PV3/G3 编码器电源提供端子电源公共端DC5V 100mA1/3 SA+、SA- 编码器A相、正交脉冲A相输入RS422标准采用双绞屏蔽线20/18 SB+、SB- 编码器B相、正交脉冲B相输入/单脉冲列输入P14/16 DZ+、DZ- 编码器Z相。
GS10.0现场调试方法
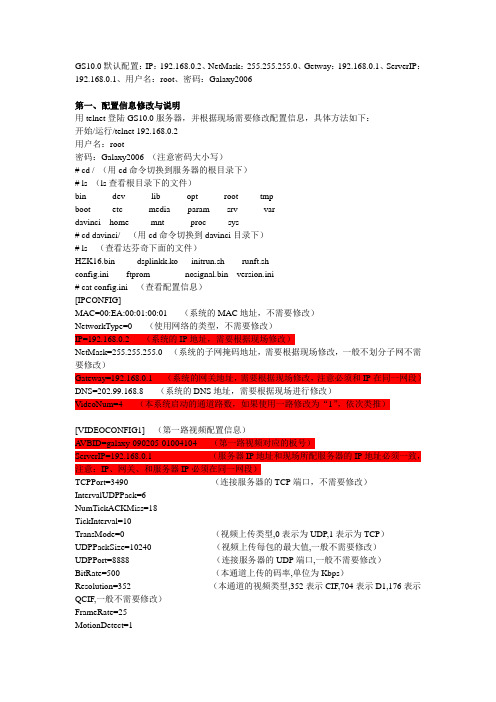
GS10.0默认配置:IP:192.168.0.2、NetMask:255.255.255.0、Getway:192.168.0.1、ServerIP:192.168.0.1、用户名:root、密码:Galaxy2006第一、配置信息修改与说明用telnet登陆GS10.0服务器,并根据现场需要修改配置信息,具体方法如下:开始/运行/telnet 192.168.0.2用户名:root密码:Galaxy2006 (注意密码大小写)# cd / (用cd命令切换到服务器的根目录下)# ls (ls查看根目录下的文件)bin dev lib opt root tmpboot etc media param srv vardavinci home mnt proc sys# cd davinci/ (用cd命令切换到davinci目录下)# ls (查看达芬奇下面的文件)HZK16.bin dsplinkk.ko initrun.sh runft.shconfig.ini ftprom nosignal.bin version.ini# cat config.ini (查看配置信息)[IPCONFIG]MAC=00:EA:00:01:00:01 (系统的MAC地址,不需要修改)NetworkType=0 (使用网络的类型,不需要修改)IP=192.168.0.2 (系统的IP地址,需要根据现场修改)NetMask=255.255.255.0 (系统的子网掩码地址,需要根据现场修改,一般不划分子网不需要修改)Gateway=192.168.0.1 (系统的网关地址,需要根据现场修改,注意必须和IP在同一网段)DNS=202.99.168.8 (系统的DNS地址,需要根据现场进行修改)VideoNum=4 (本系统启动的通道路数,如果使用一路修改为“1”,依次类推)[VIDEOCONFIG1] (第一路视频配置信息)A VBID=galaxy-090205-01004104 (第一路视频对应的板号)ServerIP=192.168.0.1 (服务器IP地址和现场所配服务器的IP地址必须一致,注意:IP、网关、和服务器IP必须在同一网段)TCPPort=3490 (连接服务器的TCP端口,不需要修改)IntervalUDPPack=6NumTickACKMiss=18TickInterval=10TransMode=0 (视频上传类型,0表示为UDP,1表示为TCP)UDPPackSize=10240 (视频上传每包的最大值,一般不需要修改)UDPPort=8888 (连接服务器的UDP端口,一般不需要修改)BitRate=500 (本通道上传的码率,单位为Kbps)Resolution=352 (本通道的视频类型,352表示CIF,704表示D1,176表示QCIF,一般不需要修改)FrameRate=25MotionDetect=1RecLostAlarm=1Brightness=127Contrast=127Satu=127Hue=127[VIDEOCONFIG2]A VBID=galaxy-090205-01004204 ServerIP=192.168.0.1TCPPort=3490 IntervalUDPPack=6 NumTickACKMiss=18 TickInterval=10TransMode=0UDPPackSize=10240UDPPort=8888BitRate=500Resolution=352FrameRate=25MotionDetect=1 RecLostAlarm=1Brightness=127Contrast=127Satu=127Hue=127[VIDEOCONFIG3]A VBID=galaxy-090205-01004304 ServerIP=192.168.0.1TCPPort=3490 IntervalUDPPack=6 NumTickACKMiss=18 TickInterval=10TransMode=0UDPPackSize=10240UDPPort=8888BitRate=500Resolution=352FrameRate=25MotionDetect=1 RecLostAlarm=1Brightness=127Contrast=127Satu=127Hue=127[VIDEOCONFIG4]A VBID=galaxy-090205-01004404ServerIP=192.168.0.1ServerIP=192.168.0.1TCPPort=3490IntervalUDPPack=6NumTickACKMiss=18TickInterval=10TransMode=0UDPPackSize=10240UDPPort=8888BitRate=500Resolution=352FrameRate=25MotionDetect=1RecLostAlarm=1Brightness=127Contrast=127Satu=127Hue=127[ftp]filename=update.iniftpdir=hikupdateusehostaddr=0hostaddr=192.168.0.1 (远程升级服务器的IP地址、需要根据现场进行修改)password=123456username=galaxy# lsHZK16.bin dsplinkk.ko initrun.sh runft.shconfig.ini ftprom nosignal.bin version.ini# cat version.ini (查看本系统的版本信息)[ftprom]version=324boardtype=hikboard# vi config (用vi编辑器进行修改配置信息,编辑用“i”;退出编辑用“Esc”键;保存用“:wq”;不保存用“:q!”)IP=133.124.43.105Gateway=133.124.43..1VideoNum=1A VBID=galaxy-090205-01004104 (第一路视频对应的板号)ServerIP=133.124.43.234hostaddr=133.124.43.234编辑完后用键盘“Esc”键退出编辑模式后,输入:wq (保存修改内容):q!(不保存修改内容)# reboot (用reboot命令重启GS10.0服务器,使得修改的配置信息生效)以上内容即为GS10.0服务器修改方法。
CTB安装使用说明书

0.5
1.0
1.8
3.6
储能时间(S)
≤8
(2)合闸/分闸电磁铁采用螺管式电磁铁,其技术参数见表2。
表2合闸/分闸电磁铁技术数据
额定工作电压(V)
~220
~110
-220
-110
-48
-24
额定工作电流(A)
1.31
3.56
1.69
4.58
13.7
26.6
额定电功率(W)
180
180
2.使用条件
本产品适用以下工作条件:
(1)储运环境空气温度上限为+65℃、下限为-40℃。
(2)使用环境空气温度上限为+65℃、下限为-30℃。
(3)相对湿度:日平均≤有95%,月平均≤90%(+25%C)
(4)海拔高度:≤3000m
(5)风速:≤35m/s
(6)使用场所:无火灾,无爆炸危险,无严重污秽,无腐蚀及剧烈震动。
输助开关的接点断开和闭合是否正确可靠。
用断路器箱体上的操作手柄对机构作手动储能手动分闸操作,应确定其操作正确可靠。
6.运输与保管
(1)机构应贮存在室内,不得遭受水气或有害气体的侵蚀,并应定期检查。
(2)机构运输时必须整台封装于箱内。
(3)装箱、开箱应在干燥的室内进行,注意不要损坏机构零部件。
7.订货须知
4.机构工作原理
CTB-S型机构工作原理
(1)合闸过程:
使用储能手柄使手动齿套转动,可使齿轴旋转,并带动主齿轮旋转。合闸弹簧被逐渐拉长,使机构储能。储能弹簧过中后,由合闸挚子保持,使机构处在准备合闸状态。
当进行合闸操作时,可采用手驱动合闸手柄,驱动脱扣板,使合闸半轴逆时针旋转,解除储能保持,合闸弹簧释放能量,使凸轮产生旋转,并带动输出拐臂动作,合闸完成时,分闸挚子扣住半轴使被驱动的断路器处于合闸状态,通常合闸挚子与半轴的扣接量为1.5mm—2.5mm。
新代 超同步GS系列调试手册

0
模拟量方式选择 0 定位编码器选择 0
电机运转方向
0
准停方向选择
0
脉冲方式选择
0
位置模式方式选 0 择
9
设定值 0
0
1 0
0 0 1 0
说明
0:感应伺服驱动 驱动交流感应电 机 1:开环 V/F 控制 适用于三相异步 电机 注:此种模式下 驱动器只接受模 拟量控制,主轴 可作准停但不可 以做零速 设定值=铭牌标 值功率/100 按手册附表选取
T1
电机热保护信号
输入
2.2、几个关键点的优先级关系
在驱动驱动器的操作和使用中若出现同时有两个或两个以上的 I 点输 入如:脉冲位置模式 X0,脉冲速度模式 X1 同时输入,则各点遵循以下优 先级。
优先级(数字越小优先级越高)
名称
对应点
1
Байду номын сангаас复位
RET
2
外部故障急停
I5
3
脉冲位置方式
X0
4
脉冲速度方式
X1
M00-M01
(只在脉冲控制 时才有效)。 刚性攻丝信号, 闭合进入刚攻状 态,(此功能仅在 双 极 性 -10v — +0v 模拟量模式 时有效)。 外部故障急停, 闭合驱动器紧急 停止(此时控制 器需配合将驱动 器 OFF 掉停止信 号发送,不然等 紧急解除后主轴 会从新启动)。 主轴摆动信号, 多用于变速箱换 挡。 段速信号,闭合 后按照设定的 速度运转(仅在 控制模式为模拟 量输入时有效, 在 CN26 中设定 10v 模拟量对应 的最高转速) 驱动器就绪输出
5
零速伺服
I3
6
准停
I2
7
主轴摆动
CTB_GS标准系列驱动器调试方法

1、八个按键的意义 ①、 【FNU】菜单键 ④、 【>】移位键 ⑤、 【∨】向下键 ⑥、 【ENT】功能选择确认键 ⑦、 【RUN】运行命令键 ⑧、 【STOP】停止命令故障复位键
2、各口定义 ①、T1、T3 是输入口。 ②、T2 是输出口。 ③、T4 脉冲输入口,需要主轴定位时,主轴编码器要并接一路到接到 T4 口,才能完成主轴定 位,编码器输出部分是显示电机速度。 ④、T5 是编码器口。 3、试运行的基本流程 ⑴、驱动器初次上电运行时,要按照以下流程进行,否则容易出现意外,损坏设备或其他危险。 步 骤 操 作 项 目 操 作 内 容 1.确认驱动器的安装螺钉已经紧固。 第1步 安装检查 2.确认驱动器附件, 交流电抗器、 制动电阻等安装螺钉已经 紧固。 1.确认电源进线,驱动器出线(相序),交流电抗器接线, 制动 第2步 主回路接线检查 回路接线(极性)是否正确。 2.确认以上接线已经连接紧固。 1.确认控制回路接线是否正确。 第3步 控制回路接线检查 2.确认以上接线已经连接紧固。 1.观察驱动器的上电过程是否正确。 第4步 上电检查 2.确认驱动器上电后没有异常发生。 1.确认驱动参数及电机参数。 第5步 调整驱动器参数 2.确认相关控制参数。 1.检测驱动器的运转状态,输出转速、电流、转矩等。 第6步 空载试运转 2.观察电机的运转情况,噪音、振动、温升等。 3.初步调整相关控制参数。 1.观察驱动器及电机的运转状态,如上一环节所述。 第7步 带载试运转 2.进一步调整相关控制参数。 3.进行长时间考机运转。 ⑵、主回路连线的确认 主回路接线请确认如下内容: ①、驱动器 R/S/T 上的接线连接至三相工频电源,电源电压符合驱动器要求。 ②、驱动器有内置制动单元,制动电阻接在 P/PB 上。N 端子上不能有任何接线。 ③、驱动器的输出端子与电机连线时,必须保证相序一致,否则电机不能正常运转,并有烧坏 设备的可能。输出电缆线采用屏蔽电缆时,要将电缆两端的屏蔽层分别接在驱动器和电机的接地端 子上。 ④、输出线路上装有滤波磁环时,滤波磁环应尽量靠近驱动器一侧,屏蔽层及接地线不能穿过 磁环,磁环不能与U/V/W端子接触。 ⑤、驱动器、电机必须有良好接地,确认所有接线连接紧固。 ⑶、控制回路接线确认 控制回路接线及跳线请确认如下内容 ①、根据设计要求确认端子输入状态是否连接正确。当数控系统输出信号为 24V 时,应选择 PNP 方式;当数控系统输出信号为 0V 时,应选择 NPN 方式(通过修改 A2.46 来完成设置) 。 ②、禁止将高压线路接在控制信号上。 ③、模拟信号输入信号接线必须采用屏蔽电缆,屏蔽线接在连接器外壳。 ④、采用 0~10V 作为速度给定时,确认 A2.02 参数是否为 1。 ⑤、电机编码器电缆是厂家提供的标准电缆。
新代-超同步GS系列调试手册

SYNTEC
北京超同步 GS系列调试手册
日期 :2010、 8、30 版本:Ver 1.2
1
苏州新代
目录
一、 驱动器与新代控制器的连接...........................................................................................3 1.1 基本接口的连接.................................................................................................................3 1.2 与新代基本功能点的连接.................................................................................................4 1.3 驱动器各针脚的定义.........................................................................................................5
T1
电机热保护信号
输入
2.2、几个关键点的优先级关系
在驱动驱动器的操作和使用中若出现同时有两个或两个以上的 I 点输 入如:脉冲位置模式 X0,脉冲速度模式 X1 同时输入,则各点遵循以下优 先级。
优先级(数字越小优先级越高)
名称
对应点
1
复位
RET
2
外部故障急停
I5
3
脉冲位置方式
X0
4
脉冲速度方式
X1
实验室CT安装与调试(操作)

实验室CT安装与调试(操作)我们实验室的CT是微焦X射线CT装置(microfocus X-ray CT system),属于第四代CT,型号为inspeXio SMX-225CT。
该设备于2012年1月安装完成,经过日本系统工程师调试达到了技术指标交付使用。
见图1-10。
图1-10 inspeXio SMX-225CT1-CT机箱2-箱体拉门3-门安全装置4-X射线警示灯5-工作站6-操作台7-真空泵inspeXio SMX-225CT特点:1.能够用外观确定CT扫描的位置。
这是业界最先在设备上通过外观相机拍摄的图像确定CT扫描位置。
老式的CT通过透视图像确定位置,而现在不需要如此繁琐,系统只通过对话框的形式就可半自动设定CT扫描条件、位置以及范围。
这样,开始扫描的准备工作就从过去的10多分钟缩短到2~3分钟;2.从微小零部件到大型零件,可扫描样品范围广泛。
管球为开放管,日常维护以更换灯丝为主,经济实惠;3.不需要校准。
老式CT在扫描前要进行繁琐的校准工作,而本设备只要将样品放置到载物台上,然后点击“开始”键即可开始CT扫描;4.根据样品自动设定X射线条件。
以前的机器需要操作者手动设定X射线照射量,而现在系统可根据样品形状和材质自动设定,此功能称为“X射线条件自动设定功能”。
此功能也是首次使用在工业用CT上,从而使此项设定内容能够在短时间内完成;5.还能在一次扫描完成后,对感兴趣的部分放大后再次做CT扫描,操作简单,但能得到高质精细的3维CT图像。
同时,门上设置了防止夹手的机构(门安全装置)、管球上安装了防止碰撞传感器,这些措施足以保证设备的安全可靠。
inspeXio SMX-225CT的技术参数指标如下:1. 搭载样品(1) 最大样品尺寸: φ300 mm×H300 mm(2) 最大搭载质量: 9 kg (包含样品固定夹具)2. X 射线发生装置(1) 最大管电压: 225 kV(2) 最大管电流: 1 mA(3) 输出功率: 135 W3. X 射线接收器(1) 输入视野尺寸: 9.0 英寸(230 mm), 7.5 英寸(190 mm), 6.0 英寸(160 mm), 4.5 英寸(120 mm)(2) 相机信号像素: 1024 ×1024 像素(3) 图像速率: 30 fps/秒4. CT 扫描功能(1) 最大视野: φ200 mm(2) 最小视野: φ5 mm(3) 分辨率: 可分辨标准样品,极限分辨率4μm(4) 处理时间: 如果符合以下条件等于或少于15 分钟5.电源(1) 主机电源: 单相、AC 200V ±10%、50 / 60 Hz 3kV A 无瞬间电压波动(2) 控制系统电源: 单相、AC 100V ±10%、50 /60 Hz 1kV A无瞬间电压波动(3) 接地: 最大100Ω,D种接地安装调试完成后日本系统工程师进行了操作培训,项目组成员能够熟练应用该CT系统进行成像操作。
CTB-GS驱动参数v1.00

序号
缺省值
调试值
说 明
An00
0
1
0-HP密码有效;1-HP密码无效
An02
~
~
0055-5.5KW;0075-7.5KW;0110-11KW;0150-15KW……
An46
0001
~
HP密码设置
Bn01
0
~
0-IO为运转使能信号、I1为运转方向信号;1-I0为正转信号、I1为反转信号
Bn02
0
~
0-双极性(-10V—+10V);1-单极性(0—+10V)
Bn05
0
~
0-逆时针为正转;1-顺时针为正转
Bn13
0
1
0-根据当前旋转方向确定定位方向;1-按参数Bn14所设方向确定定位方向Biblioteka Bn1400
0-正向定位;1-反向定位
Bn47
0
1
0-伺服使能EN无效;1-有效
Cn04
0
~
主轴定位角度参数——正向定位偏置值:
50
300
主轴定位的转速(r/min)
Cn10
8000
~
最高速度:当输入CTB驱动模拟量为+10V时,所对应的转速(r/min)
Pn05
0
1
0-电机过热保护报警方式为NC型;1-NO型
(1)主轴定位后,再解除主轴定位;
(2)用手正向转动主轴直至需要定位的位置;
(3)读取参数U2-0数值,输入至Cn04中。
Cn05
0
~
主轴定位角度参数——反向定位偏置值:
(1)主轴定位后,再解除主轴定位;
(2)用手反向转动主轴直至需要定位的位置;
otisGECB调试资料

ACD2 MR调试手册西子奥的斯电梯有限公司文件编号:ACD2 MR_SUR_ZHFIM 工地调试文件Pack 原始会签记录编制李山校对卢翊批准刘祖斌部门SIT 部门SIT 部门SIT日期2011-3-1 日期2011-3-30 日期2011-5-10AUTH. CAL9157部件版本部件名称硬件版本软件版本备注GECB-AP DAA26800AY GAA30780DAK 或更高控制柜控制板GDCB A_A26800AKT1/2 AAA30924CAH 或更高OVF2B系列变频器主板DCPB KCA26800ABS4 AAA31400AAC or higher OVF3B系列变频器主板FIM 工地调试文件Pack更改记录序号更改PC 更改内容描述更改日签名1 CAL9157 首次归档2011-05-05 苏小磊234567891011121314151617181920This work and the information it contains are the property of Xizi Otis Elevator Company (“XOEC”). It is delivered to others on the express condition that it will be used only for, or on behalf of, XOEC; that neither it nor the information it contains will be reported or disclosed, in whole or in part, without the prior written consent of XOEC, and that on demand it and any copies will be promptly returned to XOEC.FIM 工地调试文件Pack目录1控制系统概述 (5)2检修模式运行条件检查 (6)3检修运行变频器设置 (8)4GECB参数设置 (15)5检修运行 (26)6井道位置信号确认 (26)7井道位置自学习 (28)8远程站调整及检查 (31)9门检测运行(DCS) (31)10正常运行 (32)11故障排除 (34)12备注 (45)13常见问题处理 (46)14特殊功能设置 (48)FIM工地调试文件Pack1控制系统概述ACD2 MR 控制系统引用了OTIS 的GCS (全球控制系统)中的GECB 控制板作为电梯控制系统的核心,充分吸收了OTIS 技术,利用OTIS 高可靠性的串行通讯系统及CANBUS 通讯技术,将电梯的各个部件紧密的连在一起。
CT变频器快速调试说明解读

ES系列
一、基本操作
1、操作器介绍
1.1显示器
上排显示区显示: 变频器状态 当前菜单及所查看的参数编号 下排显示区显示: 参数值 具体故障类型
菜 单:18 参 数:11 参数值:50
变频器状态:triP (故障状态)
故障类型:Enc2 (编码器故障)
1.2操作键盘
键盘包括:导航键 模式键(M) 停止/复位建(红色) 正转/反转键(蓝色) 启动键(绿色)
出厂建议值 0:可读写 操作
L2:可以进 入所有菜单
序号 参数 参数名
出厂建议值
3 Pr11.31 修改控制模式
CL vect
先在xx.00输入1253 闭环矢量
(欧洲,设定值50赫兹)(异步)
或1254(美国,设置 值60赫兹),再进入 11.31更改需要模式后 直接按红色复位建。
Servo 闭环伺服 (同步)
下排 显示
OVLd
说明
电机过载 变频器中电机I2t累加器达到变频器故障门限 值的75%,且变频器负载已达到100%。
上排 显示
说明
ACUU 输入掉电
变频器检测到交流电源断电,电机减 速以维持直流母线电压。
输出 状态
允许
*Auto tunE 自调谐进行中
自调谐程序被启动 显示器交替闪烁Auto及tunE
SCAn StoP triP
搜索 OL> 当变频器与旋转中电机寻求同步 时,搜索电机频率。 停机或转速为零 变频器零转速 故障
变频器已故障,不再控制电机。显示 器显示故障类型代码。
允许 允许 禁止
二、主要参数说明
1、变频器功能参数 序号 参数 参数名
1 Pr00.34 设置访问权限
CT驱动器软件使用说明
CT驱动器软件使用说明CT驱动器软件使用说明1:引言该文档旨在提供使用CT驱动器软件的详细指南,以帮助用户正确安装、配置和操作该软件。
本文档适用于所有版本的CT驱动器软件。
2:系统要求在开始使用CT驱动器软件之前,请确保计算机系统满足以下最低要求:- 操作系统:Windows 7或更高版本- 处理器:至少1 GHz的处理器- 内存:至少2 GB的RAM- 硬盘空间:至少100 MB的可用硬盘空间- 显示器:最低分辨率为1024x7683:安装以下是安装CT驱动器软件的步骤:1: CT驱动器软件安装程序。
2:双击安装程序文件并按照提示进行安装。
3:在安装向导中选择安装路径和其他选项。
4:单击“安装”按钮开始安装过程。
5:完成安装后,关闭安装程序。
4:配置一旦安装完成,您可以按照以下步骤配置CT驱动器软件:1:打开CT驱动器软件。
2:在主界面中,“设置”选项。
3:在设置菜单中,选择所需的配置选项。
4:根据需要修改配置参数,并保存更改。
5:使用CT驱动器软件提供了以下功能,您可以根据需要进行使用:1:连接设备:通过“连接”按钮,建立与CT驱动器的通信连接。
2:监测数据:在主界面上,您可以实时监测和显示CT驱动器的各种数据,例如电流、转速等。
3:调整设置:您可以根据需要调整CT驱动器的各种参数和设置,例如最大电流、加速度等。
4:故障诊断:CT驱动器软件提供了故障诊断功能,可以检测和报告设备故障,并提供相应的解决方案。
6:升级CT驱动器软件提供定期的升级版本,以改善功能性能和修复已知问题。
要升级CT驱动器软件,请按照以下步骤进行:1:访问CT官方网站并最新版本的软件安装程序。
2:执行新版本的安装程序,并按照提示进行升级。
3:在升级完成后,重新启动计算机。
7:附件本文档附带以下附件:- CT驱动器软件安装文件- CT驱动器软件用户手册- CT驱动器软件示例数据文件8:法律名词及注释- CT:Current Transformer(电流互感器)的缩写,用于测量交流电流的装置。
CT调速器调试步骤
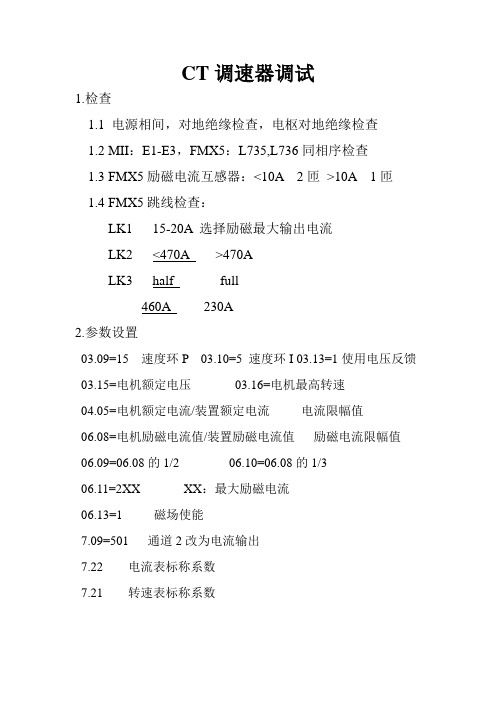
CT调速器调试1.检查1.1 电源相间,对地绝缘检查,电枢对地绝缘检查1.2 MII:E1-E3,FMX5:L735,L736同相序检查1.3 FMX5励磁电流互感器:<10A 2匝>10A 1匝1.4 FMX5跳线检查:LK1 15-20A 选择励磁最大输出电流LK2 <470A >470ALK3 half full460A 230A2.参数设置03.09=15 速度环P 03.10=5 速度环I 03.13=1使用电压反馈03.15=电机额定电压03.16=电机最高转速04.05=电机额定电流/装置额定电流电流限幅值06.08=电机励磁电流值/装置励磁电流值励磁电流限幅值06.09=06.08的1/2 06.10=06.08的1/306.11=2XX XX:最大励磁电流06.13=1 磁场使能7.09=501 通道2改为电流输出7.22 电流表标称系数7.21 转速表标称系数3.调试:3.1 磁场调节1.给定值为0,断开允许信号(21#端子)2.启动,观察励磁电流是否达到额定值3.2 电压反馈试运转1.连接允许信号(21#端子)2.电机转向检查,电机风扇转向,油泵转向检查3.确定测速反馈极性(03.02值应为正,9#,10#端子为测速反馈输入)03.04为电机电枢电压3.3 测速反馈调节1. 3.13=02. LK1—adj3.观察3.02 调节电位器使3.02=10000/测速机最大反馈电压4. LK1—FBK5.启动,使电枢电压=25%,50%,75%,100% 观察速度释放稳定,可调节3.09,3.104.1将MENTOR-II的二级密码解压(#00.00=200),并设置密码4.2参数设置完成后存储(设置##.00并按RESET键保存参数)。
CT变频器调试说明071101

CT变频器一般调试说明书一、基本操作1、键盘介绍图1-1图1-1中,显示器由两行水平排列的7段LED组成。
上排显示区显示变频器状态、当前菜单及所查看的参数编号。
下排显示区显示参数值或具体故障类型。
2、键盘操作键盘包括:导航键、一个模式键、三个控制键导航键用于控制参数结构并更改参数值。
模式键用于切换各种显示模式,如查看参数、编辑参数、状态。
若选用键盘模式,可用三个控制键控制变频器。
图1-2 键盘操作流程3、菜单结构变频器参数结构由菜单及参数组成。
变频器初始上电时仅可查阅菜单0,上下箭头键可在参数间移动,而一旦进入二级菜单(L2)(见Pr 0.49),则左右箭头键可在菜单间移动。
详情请参阅6节参数访问级别及安全。
图1-3若启动L2 访问(Pr 0.49),则仅左右箭头键可在菜单间移动。
请参阅第6部分参数访问级别及安全。
菜单及参数循环滚动,即:若已显示最后一个参数,再次按“向下”键,将显示第一个参数。
4、显示信息下表所列为变频器可能显示的存储信息及其意义。
此处不列故障类型,可查阅CT手册第十三章故障诊断。
5、保存参数更改菜单0 中参数时,按下键由参数编辑模式返回参数查看模式,即可保存新参数值。
若高级菜单中参数被更改,新参数不会自动保存,須启用保存功能保存此更改。
(怎样操作?)步骤在Pr. xx.00 中输入1000。
• 按下红色复位键6、还原缺省参数按以下方法还原缺省参数,其缺省值保存于变频器存储器中(此步骤不影响Pr 0.49 及Pr 0.34 )。
步骤在Pr xx.00 中输入1233(欧洲,设定值50 赫兹)或1244(美国,设定值60赫兹)。
• 按下红色复位键7、参数访问级别及权限参数访问级别决定用户仅可访问菜单0 或访问除菜单0 外所有高级菜单(菜单1 至21)。
用户访问权限决定用户访问方式为只读或读写。
用户访问权限及参数访问级别均可独立操作,如下所示:变频器缺省设定值属参数访问级别L1,且用户访问权限关闭,即仅以只读方式访问菜单0,而高级菜单不显示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
内容说明 驱动器状态显示了变频器当前的工作 状态(恒定正转、静止等等),发生故障 时,就会显示当前的出错信息 实际设定转速 斜坡输出的转速 实际变频器输出频率 编码器1输出频率 编码器2输出频率 通过计算得出的实际转速 编码器的实际转速 编码器输入1上测得的实际速度 编码器输入2上测得的实际速度
U4.11 转矩给定值指示 当前给定转矩
7、操作面板运行 操作方法如下: 1、需修改参数 A2.00=1,A2.45=1,A2.47=1. 2、在 F 0000 菜单下,按下操作面板上的 ENT 键,进入数值输入状态,再利用面板上的 ∧ > > 键输入要运转的转速,并再次按下 ENT 键,在按下 键电机开始运转. 3、再次按下 键电机减速并停止运转.在电机运行过程中可随时重复第 2 步来改变电机运行速度, 如在运行中需要改变电机运转方向可通过设置 A2.45 参数来实现. 注意:操作面板运行只是一种简单的运行模式,一般只是作为测试使用.建议操作面板运行时电 机的转速不要设置太高. 操作面板运行测试完成后,需将 A2.00,A2.45,A2.47 恢复原值。
3、试运行的基本流程 ⑴、驱动器初次上电运行时,要按照以下流程进行,否则容易出现意外,损坏设备或其他危险。
步骤
操作项目
操作内容
第1步 第2步 第3步 第4步 第5步 第6步
第7步
安装检查 主回路接线检查 控制回路接线检查
上电检查 调整驱动器参数
空载试运转
带载试运转
1.确认驱动器的安装螺钉已经紧固。 2.确认驱动器附件,交流电抗器、制动电阻等安装螺钉已经 紧固。 1.确认电源进线,驱动器出线(相序),交流电抗器接线, 制动 回路接线(极性)是否正确。 2.确认以上接线已经连接紧固。 1.确认控制回路接线是否正确。 2.确认以上接线已经连接紧固。 1.观察驱动器的上电过程是否正确。 2.确认驱动器上电后没有异常发生。 1.确认驱动参数及电机参数。 2.确认相关控制参数。 1.检测驱动器的运转状态,输出转速、电流、转矩等。 2.观察电机的运转情况,噪音、振动、温升等。 3.初步调整相关控制参数。 1.观察驱动器及电机的运转状态,如上一环节所述。 2.进一步调整相关控制参数。 3.进行长时间考机运转。
9、参数类别 Un:监控参数。
U1:运行监控参数1。 U2:运行监控参数2。 U3:故障状态记录参数。 U4:工厂监控参数1。 U5:工厂监控参数2。 HP:输入密码。 An:应用参数。 A1:工厂控制参数。 A2:用户多功能参数。基本控制参数A2.00~A2.35 A3:用户参数。控制相关参数A3.00~A3.69 Bn:控制参数。 B1:操作参数。 B2:速度控制参数。 B3:定位控制参数。 B4:PID参数。 Cn:接口参数。 C1:数字量输入参数。 C2:数字量输出参数。 C3:模拟量参数。 C4:程序参数 。 Dn:电机参数。 D1:电机参数。电机及驱动参数D1.00~D1.05 D2:电流环参数。 D3:编码器参数。 D4:u/f参数。 En:E1:用户自定义参数。 Fn:整数参数。 F1:自由参数。 F2:源参数。 Pn:保护参数。 P1:保护参数1。 P2:保护参数2。
6、带载试运行 驱动器带载试运行时要注意以下内容: ⑴、渐进加载,即负载要从小到大增加,发现过载要进行检查或与厂家联系。 ⑵、加载时,要不断监测驱动器的反馈转速、输出电流、输出转矩;不断观察电机振动、噪音 温升情况,发现异常及时停机。 ⑶、调整电机参数时,要先停止运转再进行,以免发生意外,参数的调节量不要太大。 ⑷、不要作过载性试验,或破坏性试验,以免烧坏驱动器或电机。 注意:当发现以下情况时,要立即停机检查,或与厂家联系。 ⑴、驱动器的反馈转速、输出电流、输出转矩波动很大,或达到极限值。 ⑵、电机运转异常,振动、噪音异常。 ⑶、机械设备出现异常。
⑥、编码器输出到数控系统的连线必须使用双绞屏蔽电缆。 ⑦、确认所有控制信号连接可靠。 ⑧、ST 端子为驱动器伺服使能,只有当 ST 有输入时驱动器才能开始工作。 注意:驱动器初次上电前必须认真进行接线的检查,否则容易发生意外事故。 ⑷、电机及驱动器参数确认 GS 系列交流伺服主轴驱动器的出厂参数基本与实际应用相符,大部分参数无需修改,如用户初 次使用,必要时还应对部分参数 进行修改或确认。 试运行需确认的参数 ①、电机及驱动参数 D1,D1.00~D1.05。 ②、基本控制参数 A2,A2.00~A2.35。 ③、控制相关参数 A3,A3.00~A3.69。
5、空载试运行 注意:空运行前首先查看屏幕显示,如果 F. 0 闪烁,伺服系统将无法工作,需要检查参数设定 是否正确,接线是否正确,接线是否有虚接,如:编码器、手脉插线是否插靠。可以在显示编码器 转速擦参数时,转动电机看编码器转速是否跟随电机的转动而变化。 还可以查看参数 U2.02 是否各位输入有效,如果无效,应检查原因并排除。 以出厂参数试运行:模拟量 0~+10V 速度给定。过程如下: ⑴、将 FI-FC 输入 1V 电压,给定使能信号 ST 及正转信号 I1。 监视如下数据: ①、给定转速 U1.00 显示为 A3.23 参数的 10%,有几转偏差正常,可通过 A3 参数调节。 ②、反馈转速 U1.02 与给定转速相符。 ③、输出电流 U1.03 电机额定电流的 30%以下正常。 ④、输出转矩 U1.04 电机额定转矩的 10%以下正常。 观察如下现象: ①、驱动器的风机是否运转? ②、电机的风机是否运转,方向是否正确? ③、电机运转是否平稳? ④、电机运转是否有异常声音? ⑤、电机的表面温度是否正常? ⑵.正转 I1 信号 ①、观察电机减速是否正常? ②、制动电阻(制动单元)是否发热严重? ③、不断提高转速,重复以上第一步、第二步的操作,监视驱动器和电机的运转情况。如有异 常要立即停机检查,必要时请与厂 家技术人员联系。
0~1500
U4.19 峰值母线电压
记录一个运行周期短时母线电压峰值
0~1500
U4.20 输出电压
当前输出电压
0~1176
U5.20 额定直流母线电压 驱动器额定直流母线电压
0~1500
U5.33 有功功率
驱动器有功功率,发电运行期间显负值
-1000.00~ 1000.00
U5.37 编码器1峰值速度 编码器1峰值速度
驱动器功率模块温度显示
显示驱动器内部温度值
用于调整电机停止位置
单位 Pulse
Pulse
-
℃ ℃ Pulse
功能码
U4.00
U4.01 U4.02 U4.03 U4.04 U4.05 U4.06 U4.07 U4.09 U4.10
名称
驱动器状态
设定转速 斜坡输出转速 实际频率 编码器1频率 编码器2频率 计算出的实际转速 实际转速 编码器1速度 编码器2速度
⑵、主回路连线的确认 主回路接线请确认如下内容: ①、驱动器 R/S/T 上的接线连接至三相工频电源,电源电压符合驱动器要求。 ②、驱动器有内置制动单元,制动电阻接在 P/PB 上。N 端子上不能有任何接线。 ③、驱动器的输出端子与电机连线时,必须保证相序一致,否则电机不能正常运转,并有烧坏 设备的可能。输出电缆线采用屏蔽电缆时,要将电缆两端的屏蔽层分别接在驱动器和电机的接地端 子上。 ④、输出线路上装有滤波磁环时,滤波磁环应尽量靠近驱动器一侧,屏蔽层及接地线不能穿过 磁环,磁环不能与U/V/W端子接触。 ⑤、驱动器、电机必须有良好接地,确认所有接线连接紧固。 ⑶、控制回路接线确认 控制回路接线及跳线请确认如下内容 ①、根据设计要求确认端子输入状态是否连接正确。当数控系统输出信号为 24V 时,应选择 PNP 方式;当数控系统输出信号为 0V 时,应选择 NPN 方式(通过修改 A2.46 来完成设置)。 ②、禁止将高压线路接在控制信号上。 ③、模拟信号输入信号接线必须采用屏蔽电缆,屏蔽线接在连接器外壳。 ④、采用 0~10V 作为速度给定时,确认 A2.02 参数是否为 1。 ⑤、电机编码器电缆是厂家提供的标准电缆。
|||| |
|
|
|
|||| |
|
|
|
I6 I5 I4 I3 I2 I1 RST ST
ID IC IB IA
M1A M0A Q2 Q1
模拟量:0~+10V
数字量:0~4095
模拟量:-10~0~+10V 数字量:0~2047~4095
模拟量:-10~0~+10V 数字量:0~2047~4095
模拟量:-10~0~+10V 数字量:0~2047~4095
最高转速<10000rpm时,为转数 最高转速≥10000rpm时,为频率
范围:-32767~32767 母线电压=380V✕1.414
转数:rpm 频率:Hz
A Nm V
功能码
名称
U2.00 电机编码器计数器
U2.01
外部编码器输入/ 脉冲输入计数器
显示
U2.02 U2.03 U2.04 U2.05 U2.05 U2.06 U2.07 U2.09 U2.10 U2.11
| | 位有效、| 位无效 I6~I1、RST、ST状态 内部开关量ID~IA状态 M1A、M9A、Q2、Q1状态 模拟量输入FI数字量 模拟量输入FV数字量 模拟量输出TS数字量 模拟量输出FT数字量 模块温度 驱动器温度 准停偏差监视
内容说明
电机编码器4倍频计数
编码器输入时,4倍频计数 单脉冲输入时2倍频计数 双脉冲输入时4倍频计数
U4.12
U4.13 U4.14 U4.15 U4.16
实际转矩值指示
实际利用率 峰值利用率 有效电流 峰值有效电流
当前实际转矩
驱动器额定电流的当前利用率 记录额定电流峰值利用率 实际有效电流 记录一个运行周期短时峰值有效电流
显示值
-32000~32000 -32000~32000 -32000~32000 -32000~32000 -32000~32000 -32000~32000 -32000~32000 -32000~32000 -32000~32000