理论力学-刚体的平面运动
理论力学-刚体的平面运动

ω
O
vB
ψ
B
x
vB = vA+ vBA
其中vA的大小 vA=R ω 。
vBA
例题
刚体的平面运动
由速度合成矢量图可得
例 题 3
vA
y
A
vA
vA vBA vB π π sin( ) sin( ) sin( ) 2 2
ω
O
所以
vB vA
y
π 2 π 2
ω
O φ
A B
刚体的平面运动
作业 9-1
曲柄连杆机构如图所 示,OA= r , AB 3r 。如 曲柄 OA 以匀角速度 ω 转动, A ω
求当 60,0 和 90 时点 B的速度。 B
刚体的平面运动
vA
ω
作业 9-1
解:
A vA vB
基点法
连杆AB作平面运动,以A为基点,B点
sin( ) sin( ) R cos cos
例题
刚体的平面运动
例 题 4
在图中,杆 AB 长 l ,
B
滑倒时 B 端靠着铅垂墙
壁。已知 A点以速度u沿 水平轴线运动,试求图
ψ u
A
示位置杆端 B 点的速度 及杆的角速度。
O
例题
刚体的平面运动
解: 基点法
B ω A
60
C D
60
E
例题
刚体的平面运动
解 : 基点法
例 题 2
vDB
B ω A
60
C
vB
60
vD
60
理论力学10刚体的平面运动
vB = v A + vBA
a a ? a
VB VBA
大小 ? 方向 a
B VA
v B = v A ctg φ且 v BA
vA = sin φ
v BA = AB ⋅ ω AB v BA vA ∴ω = = l l sin φ
φ VA
ω A x
14
[例2] 图示机构 端以速度 A沿X轴负向运动,AB=l; 例 图示机构A端以速度 端以速度V 轴负向运动, 轴负向运动 求B端的速度? 端的速度? 端的速度 解:1)分析AB;2)分析A,B两点的速度 在AB直线上的投影相等,可以得到: y B
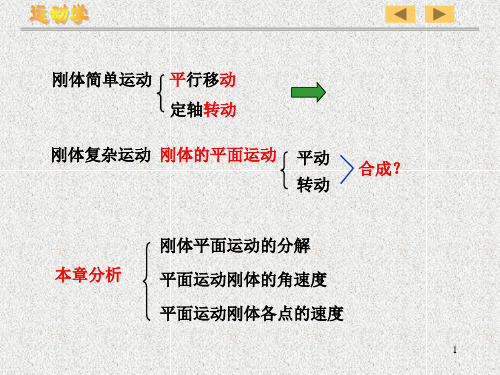
行移动 刚体简单运动 平行移动 定轴转动 定轴转动 刚体复杂运动 刚体的平面运动
平动 合成? 合成? 转动
刚体平面运动的分解 本章分析 平面运动刚体的角速度 平面运动刚体各点的速度 平面运动刚体各点的速度
1
第十章 刚体的平面运动
§10–1 刚体平面运动的概述 §10–2 平面运动分解为平动和转动 · 刚体的平面运动方程 §10–3 平面图形内各点的速度· 速度投影定理 速度瞬心 §10–4 平面图形内各点的加速度 · 加速度瞬心的概念
20
5.几种确定速度瞬心位置的方法 ①已知图形上一点的速度v A 和图形角速度ω, 可以确定速度瞬心的位置.(P点)
AP = vA , AP⊥v A ,且P在v A 顺ω转向绕A点 ω
转90º的方向一侧. ②已知一平面图形在固定面上作无滑动的滚 动, 则图形与固定面的接触点P为速度瞬 心.
21
③已知某瞬间平面图形上A,B两点速度 v A ,v B 的方向,且 v A 不平行 v B 。 过A , B两点分别作速度 v A ,v B的垂线,交点 P即为该瞬间的速度瞬心。 ④ 已知某瞬时图形上A ,B两点速度 v A , v B 大小,且 v A ⊥AB, vB ⊥AB v A − vB (a) v A 与vB 同向, ω = AB v A + vB (b) v A 与vB 反向, ω = AB 注意:交点可能在刚体的外部) (注意:交点转动· 刚体的平面运动方程
理论力学7—刚体的平面运动

A
[vB ]AB [v A ]AB
平面图形上任意两点的速度在其连线上的投影( 大小和方向)相等。这就是速度投影定理。
例7-3 用速度投影定理解例1。 解:由速度投影定理得 vB
[vB ]AB [v A ]AB
B
vA cos30 vB cos60
解得
30°
vA
A
vB 10 3 cm s
0
O
I
vCA与vA方向一致且相等, 点C的速度
vC vA vCA 2vA
7.2 平面图形上各点的速度
7.2.2 投影法
vB v A vBA
vBA
vB vA
B
将两边同时向AB方向投影:
[vB ]AAB,因 此[vBA]AB=0。于是
M
x
xO f1 (t ), yO f2 (t ), f3 (t )
这就是刚体的平面运动方程。
运动分解
y S O' O M
x
如果O'位置不动,则平面图形此时绕轴O'做定 轴转动; 如果O'M方位不变,则平面图形做平移。因此刚 体的平面运动包含了平移和定轴转动两种情况。 但能不能说平移和定轴转动是刚体平面运动的特 殊情况呢? 不能!
M
7.1 刚体平面运动的描述 而垂直于图形S的任 一 条 直 线 A1A2 必 然 作平移。 A1A2 的 运 动 可 用 其与图形S的交 点A的运动来代 替。无数的点A 构成了平面S。
A1 N A S
A2
M
因此,刚体的平面运动可以简化为平面图 形S在其自身平面内的运动。
刚体的平面运动方程 平面图形S在其平面上的位 y 置完全可由图形内任意线段 S O'M的位置来确定,而要确 定此线段的位置,只需确定 O' 线段上任一点O'的位置和线 段O'M与固定坐标轴Ox间的 O 夹角 即可。点O'的坐标和 角 都是时间t的函数,即
理论力学课件-刚体平面运动
作速度 vA、vB的垂线,交点P即为该瞬时的
速度瞬心。
③ 已知某瞬时图形上两点A 、B 的速度 vA vB且 ⊥连线 AB, 则连线 AB与速度矢 vA、vB 端点连线的交点P即速度瞬心。 (a)
vA vB (a) 若vA 与vB 同向,则 AB
v A vB (b) 若v A 与vB 反向, 则 AB
但各点的加速度并不相等。 设匀角速度为,则 aB aB n AB 2 () 而 ac 的方向沿AC,故
aB ac ,瞬时平动与平动不同。
4. 速度瞬心法 利用速度瞬心求平面图形上点的速度的方法,称速度瞬心法。 平面图形任一瞬时的运动可以视为绕速度瞬心的瞬时转动, 故速度瞬心又称为平面图形的瞬时转动中心。 若P点为速度瞬心,则任意一点A的速度大小为 vA AP , 方向 AP,指向与 一致。 5. 注意的问题 ① 速度瞬心在平面图形上的位置不是固定的,而是随时间 不断变化的。在任一瞬时是唯一存在的。 ② 速度瞬心处速度为零,但加速度不一定为零,不同于定轴 转动。 ③ 刚体作瞬时平动时,虽然各点速度相同,但各点加速度 不一定相同,不同于刚体作平动。
vB v A / sin
在B点做 速度平行四边形,如图示。
l / sin 45 2l ()
vBA vActg l ctg45 l
AB vBA / AB l / l (
)
根据速度投影定理 vB AB vA AB vB sin vA vB vA / sin
n 其中 aa aB , ae aA , ar aBA aBA aBA
于是
aB a A aBA aBA
n
aB a A aBA aBA n 其中:aBA AB ,方向 AB,指向与 一致; aBA n AB 2,方向沿AB,指向A点。
理论力学第7章 刚体平面运动

基础部分——运动学第7 章刚体平面运动连杆作什么运动呢?行星齿轮机构行星轮作什么运动?第7章刚体平面运动运动过程中,刚体上任一点到某一固定平面的距离保持不变刚体上任一点都在与某一固定平面平行的平面内运动沿直线轨道滚动的车轮机械臂小臂的运动平面运动的刚体在自身平面内运动的平面图形SxyOxyOASIIxyOA SII平面图形上任一线段的位置位置x Ay AϕB )(1t f x A =)(2t f y A =)(3t f =ϕ平面运动平移+ 转动xyOASIIxAyAϕB基点⇒O ′O O ′O O ′O′三种运动?平面运动基点平移基点转动注意:平移动系不一定固结与某一实际刚不一定固结与某一实际刚体。
O ′xyO平移动系O'x'y'x ′y ′O ′基点推广结论:刚体的平面运动可以分解为随基点的平移和绕基点的转动问题一:x yOA SIIx Ay AϕB问题二:随基点的平移与基点的选择有无关系绕基点的转动与基点的选择有无关系结论:同一瞬时平面图形绕任一基点转动的ω、α都相同。
动点re a 点的速度合成定理SAv ωABB v A v ?=B v x ′y ′基点BA v 三种运动?大小? 方向?BAA B v v v +=AωA Av BAv Bv平面图形上任一点的速度等于基点的速度与该点随图形绕基点转动速度的矢量和。
SAv ωABAv BAv Bv BAA B v v v +=试一试:基点法作平面运动。
[例7-1] 曲柄—滑块机构解:转动。
r 3ABOωϕAv Bv BAv 基点大小方向?AvBA3ABOωϕAv B v BAv Av ABω转向?= v 滑块Bϕ大小方向A 32SAv ωAB Av BAv Bv 平面图形上任意两点的速度在该两点连线上的投影(大小和正负号)相等。
速度投影定理[][]ABA AB B v v =[]ABBA vr 3再分析例7-1ABOωϕAv Bv Bv解:请比较两种方法A 32如何解释这种现象?观察到了什么现象?[先看一照片]若选取速度为零的点作为基点,则求解速度问题•基点法•速度投影法优点:缺点:优点:缺点:SAv ωAv BAv Bv AA 为基点B有没有更好的方法呢?Aω0≠ω唯一存在AL ′证明:MAA M v v v +=SA v v MAv LMPωAv PA =∴0=⋅−=ωPA v v A P ∵该瞬时瞬时速度中心速度瞬心唯一性:瞬时性:不共线,故速度均不为零。
理论力学刚体的平面运动

车轮的平面运动
刚体的平面运动可以 分解为随基点的平动 和绕基点的转动.
随基点A的平动
绕基点A'的转动
平面图形S在t时间内从位置I运动到位置II
以A为基点: 随基点A平动到A'B''后, 绕基点A'转 1角到A'B' 以B为基点: 随基点B平动到A''B'后, 绕基点B'转 2 角到A'B' 图中看出:AB A'B'' A''B' ,1 2 于是有
3
vC vB vCB
大小 ? l l 2
方向 ?
vC vB2 vC2B 1.299 m s 方向沿BD杆向右
例3 曲柄连杆机构如图所示,OA =r, AB= 3。r 如曲柄OA以匀角速度ω转动。
求:当 60,0,90时点B的速度。
已知:OA r, AB
求:当机构在图示位置时,夹板AB的角速度。
已知:AB 600mm, OE 100mm, 10 rad s , BC GD 500mm, 求:
AB
解: 1 杆GE作平面运动,瞬心为 C1
OG 800mm 500mm sin 15 929.4mm
EC1 OC1 OE 3369mm
解: 1 AB作平面运动。
vB AB vA
vB cos 30 OA
OA
vB cos 30 0.2309 m s
已知
求
OA
vE
100mm,OA
2
rad
s
, CD
3CB, CD
理论力学精品课程第十章刚体的平面运动

△
O1
O
O2
A
B
C
D
0
aC
aB
(5)取B点为基点,研究A点
(6) 取 A 为动点,OD 动系
ar
O1
O
O2
A
B
C
D
0
aC
aB
ar
x
在 Ax 轴投影得:
OD
综—3
vA
A
B
D
C
已知:vA=0.2m/s, aA = 0, AB=0.4m
求:当 AC=CB, =30 时杆 CD 的速度、加速度 .
相对于平移系的速度vMA- 相对速度 ,自A点起线性分布。
A
vA
vA
N
vCA
因此 C 点的绝对速度 v C =0。 C 点称为瞬时速度中心,简称为速度瞬心。
令
C
vA vA C 唯一性-某一瞬时只有一个速度瞬心; 瞬时转动特性-平面图形在某一瞬时的运动都可以视为绕这一瞬时的速度瞬心作瞬时转动.
解: (1) AB 杆瞬心为 P 点
vA A vCe AB
01
取 CD杆上C 为动点,AB杆为动系
B
02
vB
vCr
03
vCa
C
04
D
P
vA
A
B
D
C
(2) 取 A为基点,研究B点
AB
aB
vA
A
B
D
C
AB
(3) 取 A为基点,研究杆上C点
(4) 取 CD杆上C 为动点,AB杆为动系
E
O2C
C
O2 vB vC △
O1
理论力学 第7章 刚体的平面运动

M4 ω
M2
C ωO
A
r
M1
M3
O R
解: OA绕O转动
v2
v4
M4
vA
ω A
r
M2 v3
C ωO
M1 Ⅱ M3
RO
Ⅰ
vA AC r OAO (R r) O
C点是齿轮II的速度瞬心
因此轮
II
的角速度
R r
r
O(逆时针)
所以轮 II 上 M1,M2 ,M3 和 M4 各点的速度分别为:
8
7.2 平面图形内各点速度的求法 1、基点法 通常把平面图形中速度为已知的点选为基点
平面图形内任一点的速度 =基点的速度与绕基点转动
速度的矢量和
9
y
例7.1 椭圆规尺的A端以速度vA沿x 轴的负向运动,
AB=l。
B
解:一、基点法
1、 AB 作平面运动
O
基点:A
2、 vB vA vBA
大小 ? vA ?
vA AB ACv , vB AB BCv
得
vB
BCv ACv
vA
对三角形ABC应用正弦定理,可得
ACv
BCv
sin ( π ) sin ( )
2
注意到
,代入上式后得
B
x
vB
R0
sin ( ) cos
速度投影法
应用速度投影定理,有
vAcos vBcos
将v A = R ω , α =90o -ψ - β =ψ
速度瞬心C必定在速度垂线上
速度垂线A N
速度瞬心C
vM vA vMA vM vA AM
v
v 0 AC A
08-理论力学-第二部分运动学第八章刚体的平面运动

形S在该瞬时的位置也就确定了。
88
运动学/刚体的平面运动
四、平面运动的分解 ——平移和转动
当图形S上A点不动时,则
刚体作定轴转动 。
当图形S上 角不变时,
则刚体作平移。
故刚体平面运动可以看成是 平移和转动的合成运动。
例如:车轮的平面运动可以看成: 车轮随同车厢的平移 和相对车厢的转动的合成。
99
2121
如图示平面图形,某瞬时速度瞬心为P点, 该瞬时平面图形内任一点B速度大小
vB vP vBP vBP
B
大小:vB BP
方向:BP,指向与 转向相一致。
vB
S
vA
C
vC
同理:vA=ω·AP, vC=ω·CP
由此可见,只要已知图形在某一瞬时的速度瞬心 位置和角速度 ,就可求出该瞬时图形上各点的速度。
的平面Ⅱ内的运动。
66
运动学/刚体的平面运动
二、平面运动的简化 刚体的平面运动可以简化为
平面图形S在其自身平面内的运动。 即在研究平面运动时,不需考虑 刚体的形状和尺寸,只需研究平 面图形的运动,确定平面图形上 各点的速度和加速度。
三、平面运动方程 为了确定代表平面运动刚体的
平面图形的位置,我们只需确定平 面图形内任意一条线段的位置。
vBA
s
B
vB vA
A
vA
方向: AB, 指向与 转向一致。
即:平面图形上任一点的速度等于基点的速度与该点随
平面图形绕基点转动的速度的矢量和。 ——基点法
基点法是求解平面图形内一点速度的基本方法。 1414
运动学/刚体的平面运动
二、速度投影法
由于A, B点是任意的,因此
理论力学第九章刚体的平面运动
O 基点
转角
基点的选取是任意的,平面图形的位置可由O’点 坐标及直线O’M与x’的夹角φ 完全确定。 基点的选择不同,其运动方程9-1a不同,平面图形随基 点平移的速度和加速度也不同。但平面图形绕不同基 点转动的角速度和角加速度却完全相同。证明如下
f (t ) f (t ) 3 3
结 论
刚体的平面运动可以简化为平面图形S 在其自身平面L上的运动。
6
2、运动分析
思考
刚体平面运动是复杂运动,考虑是否可以用 简单运动合成来分析?
Oxy 平移坐标系(动系) 平面运动=随 Oxy 的平移+绕 O 点的转动
=
+
7
3 运动方程
xO f1 t 9-1a yO f 2 t f3 t 9-1b
vB AB = vA
OA
vD
vB
vB
cos30 2 CD作定轴转动(C)
0.2309 m s
vE
vA
vB vD CD 3vB 0.6928 m s CB
vD vE DE = vD ,vE cos 30 vD , vE cos 30 0.8 m s
第九章 刚体的平面运动
本章重点:刚体平面运动的基本概念,求平面图形上各 点的速度与加速度的基点法,以及求速度的 速度投影法和瞬心法,运动学的综合应用。
1
刚体平面运动举例:行星齿轮中小齿轮运动情况
2
车轮运动情况
3
观察曲柄滑块机构中连杆AB的运动情况
4
§ 9-1
1、概念
刚体平面运动的概述和运动分解
30
《理论力学》第八章刚体的平面运动

刚体的平面运动特点
刚体的平面运动具有 连续性,即刚体上任 意一点的运动轨迹都 是连续的。
刚体的平面运动具有 周期性,即刚体的运 动轨迹可以是周期性 的。
刚体的平面运动具有 对称性,即刚体的运 动轨迹可以是对称的。
02
刚体的平面运动分析
刚体的平动分析
平动定义
刚体在平面内沿着某一确定方向作等速直线运动。
详细描述
通过综合分析动能和势能的变化,可以深入理解刚体在平面运动中的能量转换过程。例 如,当刚体克服重力做功时,重力势能转化为动能;当刚体克服摩擦力做功时,机械能 转化为内能。这种能量转换过程遵循能量守恒定律,即系统总能量的变化等于外界对系
统所做的功与系统内能变化之和。
06
刚体的平面运动的实例分析
刚体的平面运动通常可以分为两种类型:纯滚动和滑动。在 纯滚动中,刚体只滚不滑,刚体上任意一点在任意时刻都位 于一个固定的圆周上。在滑动中,刚体既滚又滑,刚体上任 意一点在任意时刻都位于一个变化的圆周上。
刚体的平面运动分类
纯滚动
刚体只滚不滑,刚体上任意一点 在任意时刻都位于一个固定的圆 周上。
滑动
刚体既滚又滑,刚体上任意一点 在任意时刻都位于一个变化的圆 周上。
势能定理
总结词
势能定理描述了势能与其他形式的能量转换的关系。
详细描述
势能定理指出,在刚体的平面运动过程中,非保守力(如摩擦力、空气阻力等)对刚体所做的功等于系统势能的 减少量。非保守力做正功时,系统势能减少;非保守力做负功时,系统势能增加。
动能和势能的综合分析
总结词
在刚体的平面运动中,动能和势能的综合分析有助于理解运动过程中能量的转换和守恒。
做平动,这种运动也是复合运动。
理论力学 第十章 刚体的平面运动分解

2、平面图形内各点的速度分布
基点:C
v A v AC CM
平面图形内任意点的速度等于该点随图形绕瞬时速 度中心转动的速度。
3、速度瞬心的确定方法
已知 v A , vB 的方向, v v 且 A不平行于 B 。
vA // vB , 且不垂直于AB vB v A v AB vBA 0 AB 0 vB vA vM
绝对运动 :待求 牵连运动 :平移 相对运动 :绕 O 点的圆周运动 vM ve vr vO OM
例10-1 椭圆规尺的A端以速度vA沿x 轴的负向 运动,如图所示,AB=l。
求:B端的速度以及尺AB的角速度。
解:1、 AB作平面运动
基点: A
2、
大小 ?O r1 r2 Ⅱr2 方向
2 2 vB v A vBA 2 O r1 r2
4、 vC vA vCA
vC vA vCA 2O r1 r2
2、速度投影定理
由
vB vA vBA
沿AB连线方向上投影
求平面图形内各点速度的基点法
同一刚体上任意O′,M两点
vM vO ' vMO'
其中
vMO'
vMO' MO ' 方向垂直于MO ,指向同
大小
'
平面图形内任一点的速度等于基 点的速度与该点随图形绕基点转动速 度的矢量和。
M
M
M
=
+
动点:M
动系: O x y (平移坐标系)
2 2 vC vB vCB 1.299 m s
理论力学_刚体的平面运动
①以A为基点: 随基点A平动到A'B''后, 绕基点转1 角到A'B'
②以B为基点: 随基点B平动到A''B'后, 绕基点转2 角到A'B'
图中看出:AB A'B'' A''B' ,1 2 于是有
lim
t0
1 t
lim
t0
2 t
,1 2
;
d1
dt
d2
dt
,1
2
10
所以,平面图形随基点平动与基点的选择有 关,而绕基点的转动与基点的选取无关.(即在
待求点 基点 即平面图形上任一点的速度等于基点的速度与该点随图形绕 基点转动的速度的矢量和.这种求解速度的方法称为基点法, 也称为合成法.它是求解平面图形内一点速度的基本方法.
二.速度投影法 将上式在AB上投影:
vB AB vA AB 或 vB cos vA cos
即 平面图形上任意两点的速度在该两点连线上的投影等.这 就是 速度投影定理.利用这以定理求平面图形上点的速度的 方法称为速度投影法。速度投影定理反映了刚体上任意两点间 的距离保持不变的特性。
aB
/
O2 B;
而 O AO Bl
1
2
1 2 ;1 2.
30
(b) AB作平面运动, 图示瞬时作瞬时平动, 此时 AB 0, vA vB
O A O B l,
1
2
1 vA / O1A,
23
例3:图示机构,曲柄OA以ω0转动。设 OA=AB=r,图示瞬时O、B、C在同一铅直
线上,求此瞬时点B和C的速度。
解:(1)以OA为研究对象:
第九章刚体的平面运动_理论力学

刚体作平面运动时,任意瞬时,平面图形上存在 且仅存在一个点,在此瞬时该点的绝对速度为零,称该点为此瞬时刚体的瞬时速度中心, 或 称速度瞬心(简称瞬心) ,此瞬时刚体上其他各点的速度分布规律等效于此瞬时图形以刚体 的角速度 绕 瞬 心 作 定 轴 转 动 时 的 速 度 分 布 一 样 。 如 图 9-11 ( b ) 所 示 。
例 9-1 图 9-18 所示曲柄连杆机构。 已知
,
。 ① 求图示位置连杆 AB 之瞬心;
② 求 OA 在铅垂位置时连杆 AB 之运动特点。
解:① 分析各构件运动, OA 绕 O 作定轴转动, ,方向如图示;AB 杆作平面运动;B 点作直线运动。VB 沿 OB 方向,属于已知 两点速度方位,过 A、B 两点分别作 vA 和 vB 的垂线,其交点 C 即为图示瞬时之瞬心 C 。 ② 当 OA 位于铅垂位置时的情形。如图 9-19 所示。此时 vA∥vB ,但与 AB 不垂直,
由定义不难推出, 在刚体运动过程中, 由此推出以下结论。
的运动 (见§7-1.2) 。
结。
刚体平面运动方程式 现在来描述平面图形 在空间的位置。 (1)在图形上作直线 (2)运动方程式 ,只需确定 的位置就可以确定 的位置。见图 9-6
(9-1) §9-2 平面运动分解为平动和转动
因此式(9-2)改写成: (9-3) 其中:vM 为动点 的绝对速度
vA 为基点的速度(相对于定系) vMA 为动点 见图 9-9,则 (9-4) 2. 速 度 投 影 定 理 -- 速 度 分 析 的 第 二 种 方 法 ( 亦 称 " 基 点 法 的 推 论 " ) 相对于基点 的速度 (相对速度) ,若在平面运动刚体上另取一点 B ,
这样,平面运动分解成跟随基点的平动和相对于基点的转动。这种分解方法称为基点法。 2. 基点法的特点 (1)平动部分与基点选择有关。 (2)转动部分与基点选择无关。读者试用作图方法验证之。 (3)相对于动系转动的角速度 形的角速度,与基点选择无关。 §9-3 平面运动刚体上各点的速度分析 。由于是平动动系,所以 。称为图
理论力学刚体的平面运动
A的速度为
vA vO vAO 2vO
B的速度为
vB vO2 vBO2 2vO
同理,可得D的速度为
A
vDO
vD
D vO O
vO
vAO
vA
vO B vO
vCO
C
vBO vO
vB
vD 2vO
9.3.2 速度投影法
应用矢量投影定理,将该矢量式 vB vA vBA向
AB连线投影 。
vA cos vB cos
结论:刚体的平面运动可以 简化为平面图形S 在其自身 平面内的运动。
9.1.3 刚体的平面运动方程
在平面图形S内建立平面直角坐标系Oxy,为确定
平面图形 S 在任意瞬时 t 的位置,只须确定其上任意
线段 AB 的位置,而线段 AB 的位置可由点 A 的坐标
xA,yA 和线段 AB 与 x 轴(或 y 轴)的夹角j 来确定。
9.1.2 平面运动的简化
⑴ 作平面Ⅱ∥定平面Ⅰ且与 刚体相交成一平面图形S 。当刚体 运动时,平面图形S 始终保持在平 面Ⅱ内。平面Ⅱ称为平面图形S 自 身所在平面。
⑵ 在刚体上任取⊥平面图形S 的直线A1A2 , A1A2 作平动,其上各 点都具有相同的运动。
⑶ A1A2 和图形S 的交点 A 的运动可代表全部A1A2 的运动, 而平面图形S 内各点的运动即可代表全部刚体的运动。
[vB ]AB [v A ]AB
(9-3)
速度投影定理:平面图形上任意两点的速度在 这两点连线上的投影相等。速度投影定理是刚体上任 意两点间的距离保持不变的必然结果。适用于任何形 式的刚体运动。
应用速度投影定理求速度的方法称为速度投影 法。
例9-4 用速度投影法求例9-1中点B的速度。
理论力学第九章刚体的平面运动
v CA
v MA
C
vA
vA vA
v M = v A + v MA
v M = v A − ω ⋅ AM
v 当M在VA垂线上时: MA = ω ⋅ AM 垂线上时:
必可找到一点C: v C = 0 (v A = v CA ) v AC v A ⇒ AC = =
ω
ω
15
2、平面图形内各点的速度分布
小 A 大 ? ω ⋅O = ω r2 0 Ⅱ 方 ? 向 √ √
2 2 vB = vA +vBA
vB
vA
v CA v A
vC
v BA v A
= 2ω (r +r2 ) O 1
vB与 A夹 为 o, 向 图 v 角 45 指 如
4 vC =vA +vCA vC =vA +vCA = 2 O(r +r ) ω 1 2
向 方 √
√ √
8
ω DE
[例9-3]曲柄连杆机构如图所示,OA =r,AB= 3 。如 3]曲柄连杆机构如图所示, 曲柄连杆机构如图所示 r 转动。 曲柄OA以匀角速度ω转动。 0o 90 点 的 度 求 当 =60o,, o时 B 速 。 : ϕ
vA
vA
解:1 AB作平面 运动, 基点: 运动, 基点:A
6
2、例题分析
轴的负向运动, [例9-1] 椭圆规尺的A端以速度vA沿x 轴的负向运动, 如图所示, 如图所示,AB=l。求:B端的速度以及尺AB的角速度。 。 的角速度。 解:1、AB作平面运动, 作平面运动, 作平面运动 基点: 基点: A
vB
v BA
2 vB = vA +vBA
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七章 刚体的平面运动一、是非题1.刚体作平面运动时,绕基点转动的角速度和角加速度与基点的选取无关。
( )2.作平面运动的刚体相对于不同基点的平动坐标系有相同的角速度与角加速度。
( )3.刚体作平面运动时,平面图形内两点的速度在任意轴上的投影相等。
( )4.某刚体作平面运动时,若A 和B 是其平面图形上的任意两点,则速度投影定理AB B AB A u u ][][ =永远成立。
( )5.刚体作平面运动,若某瞬时其平面图形上有两点的加速度的大小和方向均相同,则该瞬时此刚体上各点的加速度都相同。
( )6.圆轮沿直线轨道作纯滚动,只要轮心作匀速运动,则轮缘上任意一点的加速度的方向均指向轮心。
( )7.刚体平行移动一定是刚体平面运动的一个特例。
( )二、选择题1.杆AB 的两端可分别沿水平、铅直滑道运动,已知B 端的速度为B u,则图示瞬时B 点相对于A点的速度为 。
①u B sin θ;②u B cos θ;③u B /sin θ;④u B /cos θ。
2.在图示内啮合行星齿轮转动系中,齿轮Ⅱ固定不动。
已知齿轮Ⅰ和Ⅱ的半径各为r 1和r 2,曲柄OA以匀角速度ω0逆时针转动,则齿轮Ⅰ对曲柄OA 的相对角速度ω1r 应为。
①ω1r =(r 2/ r 1)ω0(逆钟向);②ω1r =(r 2/ r 1)ω0(顺钟向);③ω1r =[(r 2+ r 1)/ r 1] ω0(逆钟向);④ω1r =[(r 2+ r 1)/ r 1] ω0(顺钟向)。
3.一正方形平面图形在其自身平面内运动,若其顶点A、B、C、D的速度方向如图(a)、图(b)所示,则图(a)的运动是的,图(b)的运动是的。
①可能;②不可能;③不确定。
4.图示机构中,O1A=O2B。
若以ω1、ε1与ω2、ε2分别表示O1A杆与O2B杆的角速度和角加速度的大小,则当O1A∥O2B时,有。
①ω1=ω2,ε1=ε2;②ω1≠ω2,ε1=ε2;③ω1=ω2,ε1≠ε2;④ω1≠ω2,ε1≠ε2。
三、填空题1.指出图示机构中各构件作何种运动,轮A(只滚不滑)作;杆BC作;杆CD作;杆DE作。
并在图上画出作平面运动的构件、在图示瞬时的速度瞬心。
2.试画出图示三种情况下,杆BC中点M的速度方向。
3.已知ω=常量,OA=r ,u A =ωr=常量,在图示瞬时,u A =u B ,即u B =ωr ,所以αB =d(u B )/dt=0,以上运算是否正确? ,理由是 。
4.已知滑套A 以10m/s 的匀速率沿半径为R=2m 的固定曲杆CD 向左滑动,滑块B 可在水平槽内滑动。
则当滑套A 运动到图示位置时,AB 杆的角速度ωAB = 。
5.二直相长度均为1m ,在C 处用铰链连接、并在图示平面内运动。
当二杆夹角α90︒时,u A ⊥AC ,u B ⊥BC 。
若ωBC =1.2rad/s ,则u B = 。
6.半径为r 的圆盘,以匀角速度ω沿直线作纯滚动,则其速度瞬心的加速度的大小等于 ;方向 。
7.小球M 沿产径为R 的圆环以匀速ur 运动。
圆环沿直线以匀角速ω顺时针方向作纯滚动。
取圆环为动参考系,则小球运动到图示位置瞬时:①牵连速度的大小为 ;②牵连加度的大小为 ;③科氏加速度的大小为(各矢量的方向应在图中标出)。
四、计算题1.机构如图,已知:OA=OO 1=O 1B=L ,当φ=90º时,O 和O 1B 在水平直线上,OA 的角速度为ω。
试求该瞬时:(1)杆AB 中点M 的速度M V ;(2)杆O 1B 的角速度ω1。
2.平面机构如图所示。
已知:OA=AB=BC=L ,2/3L BD =,DE=3L/4,杆OA 的角速度为ω。
在图示位置时,φ=30°,O 、B 、C 三点位于同一水平线上。
试求该瞬间滑块C 的速度。
3.平面机构如图所示。
已知:等边三角形板ABO 边长L=30cm ,A 端与半径r=10cm 的圆盘中心铰接,圆盘可沿R=40cm 的固定圆弧槽作纯滚动,BC=60cm 。
在图示位置时,OA 铅垂,BC 水平,盘心A 的速度u A =20cm/s 。
试求该瞬时滑块C 的速度。
4.图示平面机构中,A 和B 轮各自沿水平和铅垂固定轨道作纯滚动,两轮的半径都是R ,BC=L 。
在图示位置时,轮心A 的速度为u,θ=60°,AC 水平。
试求该瞬时轮心B 的速度。
5.图示偏置曲柄机构,已知:曲柄OA 以匀角速度ω=1.5rad/s 转动,OA=40cm ,AB=50cm ,h=30cm 。
试求OA 在图示水平位置时,滑块B 的速度和加速度。
6.在图示椭圆规机构中,已知:OC=AC=CB=R,曲柄OC以匀角速度ω转动。
试用刚体平面运动方法求φ=45°时,滑块B的速度及加速度。
7.在图示四杆机构中,已知:AB=BC=L,CD=AD=2L,φ=45°。
在图示瞬时A、B、C成一直线,杆AB的角速度为ω,角加速度为零。
试求该瞬时C点的速度和加速度。
8.在图示平面机构中,已知:BC=5cm,AB=10cm,A点以匀速度u A=10m/s沿水平运动,方向向右;在图示瞬时,θ=30°,BC杆处于铅垂位置。
试求该瞬时:(1)B点的加速度;(2)AB杆的角加速度;(3)AB杆中点D的加速度。
9.平面机构中在图示θ=30°位置时,杆AB及O2C分别处于水平及铅垂位置,O1A为铅垂线,O1A=O2C=L=10cm,u A=8cm/s,αA=0。
试求此瞬时:(1)连杆BC的角速度ωBC;(2)杆O2C的角速度ω2;(3)杆O1B的角加速度ε1。
10.半径为R的圆盘沿水平地面作纯滚动,细杆AB长为L,杆端B可沿铅垂墙滑动。
在图示瞬时,已知圆盘的角速度ω0,角加速度为ε0,杆与水平面的夹角为θ。
试求该瞬时杆端B的速度和加速度。
11.在图示平面机构中,曲柄OA以匀角速度ω=3rad/s绕O轴转动,AC=L=3m,R=1m,轮沿水平直线轨道作纯滚动。
在图示位置时,OC为铅垂位置,φ=60°。
试求该瞬时:(1)轮缘上B点的速度;(2)轮的角加速度。
12.平面机械如图所示。
已知:直角刚杆AOB的一边长为OB=15cm,BC=30cm。
半径r=10cm的圆盘在半径R=40cm的固定圆弧面上作纯滚动,匀角速度ω=2rad/s。
在图示位置时OB铅垂,φ=30°。
试求该瞬时(1)BC杆的角速度和角加速度;(2)滑块C的速度和加速度。
13.平面机构如图所示。
套筒在轮缘上B点铰接,并可绕B转动,DE杆穿过套筒。
已知:r=h=20cm,OA=40cm。
在图示位置时,直径AB水平,杆DE铅垂,OA杆的角速度ω=2rad/s。
试求该瞬时杆DE的角速度。
14.平面机构如图所示。
AB杆可沿气缸F滑动,而气缸FO1C可绕O1轴摆动。
已知:OA =r=10cm,O1C=40cm,CD=402cm,DE=AB=30cm。
在图示位置时,φ=θ=45°,ω=2rad/s,A与O1C处于同一水平线,AO1=40cm,DE水平。
试求该瞬时杆DE的角速度。
15.平面机构如图所示。
套筒B与CB杆相互垂直并且刚连,CB杆与滚子中心C点铰接,滚子在车上作纯滚动,小车在水平面上平动。
已知:半径r=h=10cm,CB=4r。
在图示位置时,θ=60°,OA杆的角速度ω=2rad/s,小车的速度u=10m/s。
试求该瞬时滚子的角速度。
OB=BA,φ=60°,θ=30°,∠A=90°,OA的角速度为ω。
试求此瞬时套筒D相对BC的速度。
第七章 刚体的平面运动参考答案一、是非题1.对 2.对 3.错 4.对 5.对 6.对 7.对 8.错二、选择题1.④ 2.② 3.②;① 4.③三、填空题1.答:轮A 作平面运动;杆BC 作平面运动;杆CD 作瞬时平动;杆DE 作定轴转动(图略)。
2.答:略3.答:最后一式:a B =du B /dt=0不正确。
∵加速度应为速度函数对时间的导数而非某瞬时值的导数。
4.答:ωAB =0。
5.答:1.2m/s6.答:大小:a=r ω2。
7.r k e e u a R a R u ωωω2 ; ;22===(图略)。
四、计算题1.解:V A =L ω因为杆AB 的速度瞬心在O 点,故ωAB =V A /L=ωV M =OM ·ωAB=ωL 521⨯ (垂直OM 偏上) ω01B =V B /O 1B=OB ·ωAB /O 1B=2ω (逆时针)2.解: 60cos 30cos B A u u AB =平面运动水平向左平面运动ωωL u u u BC L u u C C B A B 5.130cos 33====3.解:等边三角形板作定轴转动u B =u A =20cm/s 它与水平夹角 θ=60°BC 杆作平面运动 u C =u B ·cos θ=10cm/s →4.解:轮A 平面运动,瞬心P 点u PC u R u A C A 2 ,/=⋅==ωωBC 平面运动u c cos15°=u B cos30°, u B =1.58u铅直向上5.解:取点B 为基点,则有cm/s 75)5/4/(60cos /)( cm/s 45)3050(305.140 2/122===→=-⨯⨯=⋅=+=ααA AB A B ABB A V V tg V V V V V 得 取点A 为基点,则有τBA n BA A B a a a a ++=将上式投影到A B 方向,得222cm/s 231 )4/()5( cos / cm/s63.230cos /)cos (cos cos =⨯⨯+⋅=+==+=∴+=AB V OA a a a a a a a a a nAB nBA A B nBA A B nBAA B ωααααα故 6.解:取杆AB ,根据速度投影定理,有 V B cos45°=V C ωR V V C B 22== (↑) 杆AB 的速度瞬心在点P ,它的角速度0//ωωω===R R CP V C AB 顺时针 取点C 为基点,则有τBC n BC c B a a a a ++= 将上式投影到A B 方向,得)(222 45cos 22↓===∴=ωωR R a a a a AB n BC B nBCB 7.解:杆BC 的速度瞬心在点C ,故 VC=0),( 3/34 3/)(32 30cos /)(30cos ,,//222偏上垂直得轴将上式投影到则有为基点取点CD L L L a a a a a a X a a a B L L BC V n CB B C n CBB C CB n CB C B BC ωωωωωωτ=+=+=∴--=⋅-+====∴8.解:(1)求a B 和εAB()方向如图示为基点则选求逆时针由图中几何关系得则为基点选杆作瞬时平动不垂直于且常量 cm/s 3/3203/45)2(/3/4 10/3/40/cm/s 3/340)2/3/(25 30cos /cos / ,A rad/s25/10/,0,,||0,22AB 222=⨯=⋅==∴++=====⨯=⋅===++=+====∴=∴=AB DA D DAn DA A D DBA BC n B BA B BAn BA A B n B B BC AB A B A A A DA a a a a a a A a s rad AB a BC a a a a a a a a BC V AB V AB V V a V εεωθωωττττττ9.解:由速度投影定理 AB B AB A V V ][][=/ 0)/60sin (2 60sin 60cos ),0(cm/s 34.6cm/s 8.1220/16/a rad/s8.010/8/, rad/s 6.110/16/ rad/s 8.020/16/ cm/s16 ,C cm/s 1660cos /860cos / 11122222212B 1122BC ==∴=⋅-⋅==++=+==⋅=============∴===+====B O a B O V AB a a a a a a a a a A BA a B O V A O V O AB CO V BC V V V V V V V V V B B AB B n BAn B B n BA BA n B B A AB n BA B n A AB C BC B BC C BCC B A B τττττεωωωωω 得将上式向水平轴投影则有为基点取点有故杆的速度瞬心为点顺时针顺时针故则得为基点取点得10.解:(1)求B VC 1为圆盘速度瞬心,故V A =R ω0∵C 2为杆AB 速度速度瞬心,故 铅直向下方向方向有上式投影在则为基点选求铅直向下:)sin /( sin /)cos ( cos sin , ,)2( sin /cos sin //32020********θωθεθωθεθθεθωθωθωθωωτL R ctg R L R a a a a BA a a a a A R a a ctg R L R L BC V L R AC V AB B nBA A B BA n BA A B A BAB B A AB +=+=∴+=++===⋅=⋅=∴==11.解:AC 杆速度瞬心在O 点,故ωAC =V A /AO=ωV C =CO ·ωAC =23ω轮子速度瞬心在C 1点,故ωC =V C /R=23ω/RVB=BC1·ωC =2R ·23ω/R=14.7 cm/s 方向如图选A 为基点,则τCA n CA A C a a a a ++=上式投影在CA 方向,有 顺时针rad/s 54/2 60cos /cos /222===⋅==R a L AC a a C C AC n CA C εωωφ12.解:圆盘作平面运动,P 点为速度瞬心u A =r ω=20cm/sαA τ=0αA n =u A 2/OA=40/3cm/s 2直角刚杆AOB 定轴转动2B 2cm/s 3/2021,0cm/s 1021=====n A n B A B u u ααατ BC 杆瞬时平动,其角速度 ω2=0→==∴=====⋅=++=←==∴ cm/s 55.11 rad/s 44.0/BCcm/s 3/40sin / 0cm/s 10 222222φαααεφααωααααατττctg BC BC u u n B C CB n B CB n CB n CB CB n B c B c 逆时针杆的角加速度得式中13.解:轮作平面运动 u A =OA·ω=80cm/s以A 为基点: CA A C u u u +=u C =u A cos60°=40 cm/s以C 为基点: BC C B u u u +=动点:铰链B ,动系:DE r e B u u u += 即 BC C u u +=r e u u+得 u e =u C∴ ωDE =u e /DB=1 rad/s 逆时针14.解:动点:A ,动系:气缸FO 1CA u =r e u u+ 顺时针rad/s 0.47 /30210/u u cm/s 210u cm/s 21022145cos C D c =========ED u u r u u D ED e A e ωω15.解:轮、BC 杆作平面运动,以D 为基点 C u =CD u u +即 u C =r ωD -u以C 为基点: BC C B u u u += 动点:套筒B ,动系:OAB u =r e u u +即 BC C u u +=r e u u+向η方向投影 u c cos30°=u e (r ωD -u )cos30°=OB ·ω OB=803/3 cm∴ ωD =11.67rad/s 顺时针16.解:以滑套B 为动点,OA 为动系 11r e B V V V +=由速度平行四边形得 3/3230cos /1b V V e B ω== AD 杆作平面运动,据速度投影定理,有3/3430cos /b V V A D ω== 再以套筒D 为动点,BC 杆为动系 =D V 11r e V V +=r B V V +将上式向水平方向投影得r V b b +⨯=ωω32313/34 解得 3/32ωb V r =。