混沌神经网络的混沌控制讲义及其应用
非线性系统混沌运动的神经网络控制
{
:: *+ 0# ! , " * ( + 0 -’+ " & + ,
( [ ( ] * "! ! ! " ! ( "# ! # " # ) $ % % )"( $ %% ) !# ($ ) ! !# ) ! (+) 因 % 的变化范围很小, 由 (,) 式可得 !$ ( %) 于 ! %& , 是 (+) 式可改写为 ( [ (( "! ! ! " ! ( "# ! # " # ) $ %% ) !# ($ " %& ( ! !# ( ] , (-) ) %& ) ! $ %% ) 式中 % 在 % % 附近波动, 通过 % 的扰动, 使 !# ( $ 落在 不动点! ( 附近的稳定流形上, 即 " !!# ( $ " %, 用 $ %% ) (-) 式等号两边, 有 " ! 点乘 )( " !! ( " "( ) ( % ) $ %% ) % " ! ! !# !$ % * (.) ( "! & "! ) $) 按照 (.) 式给混沌系统施加扰动作用, 如果下次迭代 落在不动点稳定轨道族中, 则以后迭代将被引到不 动点, 周期 $ 轨道也会离开混沌吸引子而进入稳定 周期轨道 * 根据 (.) 式对混沌运动进行控制, 允许噪 声干扰, 噪声形式为# $# , $# 为均值为零的高斯单位 随机变量, # 为衡量噪声强度的一个常数 * 为保持控 制的有效性, 可设定 % 不超过某个最大值 % /01 , 由 (.) 式可知扰动控制过程混沌轨迹离不动点最大距 离为
控制系统的神经网络混沌滑模控制方法
控制系统的神经网络混沌滑模控制方法混沌滑模控制是一种基于滑模控制理论和混沌控制理论的控制方法。
神经网络则是一种模拟生物神经系统工作原理的数学模型。
将神经网络与混沌滑模控制相结合,可以充分发挥两种方法的优点,实现对于控制系统的高效控制。
本文将介绍控制系统的神经网络混沌滑模控制方法及其应用。
1. 神经网络的基本原理神经网络是一种由相互连接的人工神经元构成的网络模型,它通过学习和训练来实现对输入输出之间的映射关系的建立。
神经网络具有并行处理能力,可以处理非线性、复杂的问题。
常见的神经网络模型包括前馈神经网络、循环神经网络和卷积神经网络等。
2. 混沌滑模控制的基本原理滑模控制是一种通过引入滑模面,使系统状态迅速达到所期望的状态的控制方法。
混沌控制是一种利用混沌现象来改变系统行为的控制方法。
混沌滑模控制则是将滑模控制和混沌控制相结合,利用混沌现象来增强滑模控制的鲁棒性和抗干扰能力。
3. 控制系统的神经网络混沌滑模控制方法控制系统的神经网络混沌滑模控制方法是将神经网络和混沌滑模控制相结合,实现对控制系统的高效控制。
首先,使用神经网络建立控制系统的模型。
通过对系统的输入输出数据进行训练,神经网络可以学习到系统的映射关系,并建立相应的模型。
其次,引入滑模面。
选择合适的滑模面可以使系统的状态在滑模面附近快速收敛到所期望的状态。
然后,利用混沌现象增强滑模控制。
通过将混沌序列引入到滑模控制中,控制输入可以增加随机性,提高系统的鲁棒性和抗干扰能力。
最后,利用神经网络进行在线调整。
在控制过程中,神经网络会根据系统的实际状态对控制器进行调整,以适应系统的变化和不确定性。
4. 控制系统的神经网络混沌滑模控制方法的应用控制系统的神经网络混沌滑模控制方法可以应用于众多领域,如机械控制、电力系统控制、航空航天控制等。
在机械控制中,神经网络混沌滑模控制可以提高机械系统的运动精度和稳定性,实现对复杂轨迹的跟踪。
在电力系统控制中,神经网络混沌滑模控制可以实现对电力系统的频率、电压等参数的控制,提高电力系统的稳定性和鲁棒性。
混沌在BP神经网络中的应用

3 噪声对神 经 网络泛化 能力 的影响
多层 前 向 网络 的泛 化 能 力 是 指 学 习 后 的神 经 网络 对 测
试样本或工作样本 作 出正确反应 的能力 。所 以没有 泛化能 力的神经网络没有任何使用价值。正因为其重要性 , 泛化 问
题 已 成 为 近年 来 国 际 上 十 分 关 注 的 理 论 问 题 。 在 神 经 网 络
第2卷 第 期 8 6
文章编号 :06— 3 8 2 1 )6— 2 5— 4 10 9 4 (0 1 0 0 1 0
计
算
机
仿
真
21 月 0 年6 1
混沌在 B P神 经 网络 中 的 应 用
秦 国兴
( 山 学 院 计算 中 心 , 北 唐 山 0 3 0 唐 河 6 00)
摘要 : 为了提高误差反 向传播算法的网络 泛化能力 , 针对 B P网络 中所 存在网络泛 化能力差的 缺点, 结合混沌优 化的优点 , 提出了一种改进 的算法 。将网络中的少数神经元的激励函数 改变为具有混 沌特性的激励 函数 , 这些神 经元不存在饱和 区, 从而可以加快学 习速度 , 克服假饱 和现象 , 并且神经元的输 出具有一定的随机性 , 似于噪声的作用 , 类 可在一定程 度上提高 网络的泛化能力 。针对字符识 别的仿真效果进行分析 , 证明网络 的容错能力较好 , 网络 的泛化能力得到了改善 。
( o p t gC ne, a ghnC lg , a ghnH bi 60 0 C i ) C m u n e t T nsa oee T n sa ee 0 30 , hn i r l a
ABS TRACT : s a c h a k p o a ain ag r h t mp o e te n t r e e aiain a i t .B ew r a Re e r h t eb c r p g t o i m i r v h ewo k g n r l t b l y o l t o z o i P n tokh s t e s ot o n so o rn t r e e a i t n, a l s t r t n a d b d g n r l ain c p b l y h h r mig f o ewok g n r l a i c p z o f u t au ai n a e e ai t a a i t .C mb nn h d o z o i o i i gt e a ・ v n a e o e c a s o e l oi m sp o o e . S me a t a in f n t n fn u a e r h o e t e c a t a tg ft h o ,a n v lag r h i r p s d o ci t u ci so e rln t k c o s h h oi h t v o o wo c
控制系统的神经网络模糊混沌滑模控制方法

控制系统的神经网络模糊混沌滑模控制方法控制系统的神经网络模糊混沌滑模控制方法是一种应用于复杂控制系统中的先进控制技术。
该方法通过神经网络模型的建立和混沌滑模控制策略的设计,实现对系统动态特性的有效控制。
本文将详细介绍控制系统的神经网络模糊混沌滑模控制方法的原理与应用。
1. 神经网络模型的建立神经网络模型是控制系统中关键的一部分,通过拟合系统的非线性映射关系,实现对系统输入和输出之间的关系建模。
神经网络模型通常由输入层、隐含层和输出层组成,其中隐含层的神经元数量和连接权值决定了模型的表达能力。
在建立神经网络模型时,可以使用多种算法进行参数训练,例如反向传播算法、遗传算法等。
2. 模糊混沌滑模控制策略的设计模糊混沌滑模控制策略是控制系统中的一种优化控制方法,通过结合模糊控制理论和混沌理论,实现对系统的快速响应和鲁棒性改善。
该策略的核心思想是将混沌系统引入到滑模控制中,通过混沌系统的随机性和非线性特性,增加系统对干扰和参数变化的抵抗能力。
同时,利用模糊控制的模糊逻辑和推理能力,提高系统的自适应性和鲁棒性。
3. 控制系统的性能指标与优化方法在神经网络模糊混沌滑模控制方法中,性能指标的选择与优化方法的设计是至关重要的。
常见的性能指标包括响应速度、超调量和稳态误差等,可以根据具体的应用需求进行调整和优化。
优化方法主要包括参数整定和控制策略的选择,可以使用各种优化算法进行参数搜索和求解最优解。
4. 案例分析与仿真实验为了验证控制系统的神经网络模糊混沌滑模控制方法的有效性,本文将以某电力系统的调度控制为例进行案例分析和仿真实验。
通过对电力系统的动态特性建模和仿真,可以评估控制系统的性能和鲁棒性,并对系统参数进行优化和调整。
综上所述,控制系统的神经网络模糊混沌滑模控制方法是一种先进的控制技术,具有良好的控制效果和鲁棒性。
通过神经网络模型的建立和混沌滑模控制策略的设计,可以实现对复杂控制系统的高效控制和优化。
然而,在具体应用中,还需要综合考虑系统的特性、性能指标和优化方法,以实现最佳的控制效果。
关于混沌小论文--概念、混沌控制方法、应用领域等

混沌论文即使没有外界影响社会系统在自身理性逻辑的控制下,它的发展行为也是完全不可预测的。
甚至政策上的微小变化都有可能导致完全不同的变化───莫斯基德(E.Mosckilde)拉森(rsen)斯特曼(J.D.Sterman) 这种多因素影响的事物发展过程的不确定性即混沌。
(一)混沌的概念:混沌(c h a os ) 是指在确定的系统中出现的一种貌似不规则的运动, 是非线性动力系统具有内在随机性的一种表现。
其特征表现为对初始值的敏感性和对未来(即长期演变)的不可预测性。
混沌所显示的类似随机的行为过程, 与具有外在随机项的非线性的不规则结果有着根本的差异。
对于那些由于方程中加卜随机项或随机系数lflJ’得到的随过程来说, 系统的精确行为无法界定; 而对于混沌来说, 系统的结构是确定的, 而且系统的行为在短期内也是可以确定的。
但是在某些参数值范围内, 系统的行为会出现不稳定的或是不规则的变化, 初始条件的微小变化经一系列的递归演化后将导致系统行为的轨道发生巨大的漂移, 从而使系统行为演化轨道的概念失去原有的描述含义。
混沌现象是非线性系统中普遍存在的, 而产生混沌的途径也是多种多样的, 一般有以下四种:(1) 倍周期分又路径, 即系统中相继出现2 , 2^2,2^3……2^m的倍周期分叉, 然后进入混沌状态。
(2) 阵发混沌路径, 即在系统中发生切分叉点之后, 表现出忽而周期忽而混乱, 随机地在两者之问跳跃的生成路径。
阵发混沌与倍周期分叉实质上是李生现象, 在凡是能观察到倍周期分叉的系统中, 原则上均会出现阵发混饨现象。
(3) 含有不可约频率的准周期路径, 即山具有两个或多个不可约(也即比值为无理数)的频率成分的准周期运动进人混沌状态。
(4)稳定流和不稳流横截相交产生混沌。
混沌有如下特点:①对初值的极其敏感性。
混沌的本质特征是系统长期行为对初始条件的敏感依赖性,或称“蝴蝶效应”, 若初值有微小偏差,长时间后会出现较大的、无法预测的偏差,即系统的长期不可预测性。
第五章 混沌控制

r 12 e 2 0 0
r 13 r23
0
r2 n r( n 1) n e n rn 1
(10)
其中
i 是和系统Lyapunov指数相关的量 ,rij 表R阵上的其它量。
R R 1 . 1 0 0
13
3.5.4 Simulation results 1, 1 2 - antiphase motion
2 10 s 2 ,
k 0.5 s 2 ,
1s , 0.7,
1
H* 20 s 2
14
1, 1 2 , system with loss ( 0.1 s -1 )
“Control of Complex Systems”
Method of Ott-Grebogi-Yorke (OGY):
The problem is reduced to a standard linear control problem.
2. Control is switched o
t
i t
t
(13)
由式(12)可以求出系统的Lyapunov指数。
5.2 控制和利用混沌的意义
一、利用混沌的意义: 混沌运动的基本特征是运动轨道的不稳定性,表现在对 初值的敏感依赖性,或对小扰动的极端敏感性。 • 概念:不稳定周期轨道——若系统严格的处于其上,则它会永 远的留在这条轨道上,但只要有相对于这条轨道的极小偏差, 则偏差将随时间指数的增长,系统将会很快离开此轨道。 • 特点:对于一个具有无穷多不稳定周期轨道的集合上,这种周 期轨道,由于不稳定性存在,而使其不可能被观察到,观察到 的是一种奇怪的“似乎”随机的跳动,被称为混沌轨道。 以前人们认为:混沌运动既不可预报,又不可控制,故希望避免这 种“有害”现象,所以工程设计是总是要消除系统中任何混沌行为。 二、控制、利用思想的形成、发展 • 1950年 John Von Nenmann:利用混沌敏感性; • 1987年 Hubler 与 Luscher:引入控制混沌的思想 系统 → 系统变为稳定周期轨道 ↑ 原驱动力 +驱动力的合适项(也可认为是小的扰动)
混沌神经网络的研究及其应用---王敏瑞
上海大学2010 ~2011 学年冬季学期研究生课程论文课程名称:《动力系统基础》课程编号:011201907论文题目: 混沌神经网络的研究及其应用作者姓名:王敏瑞学号: 10720072 成绩: 论文评语:评阅人签名:批阅日期:混沌神经网络的研究及其应用王敏瑞(上海大学理学院,上海200444)摘要:本文通过保持暂态混沌神经元的混沌搜索机制,产生了一类新的混沌动力学系统。
首先分析了该混沌动力系统的参数对系统的影响;其次分析了其混沌时间序列的Lyapunov指数、关联维、熵等动力学特性。
举例通过试验分析验证了该混沌动力系统在密码学上应用。
关键词:混沌动力系统混沌神经元Lyapunov指数The Research And Application OfChaotic Neural NetworkWang Minrui(College of science, Shanghai University, Shanghai 200444. China)Abstract:This paper presents a kind of novel chaotic dynamic system by maintaining the chaotic searching mechanism of TCNN. First, we make an analysis of the parameters’ effects to the system; second, we make an analysis of the Lyapunov exponent, correlation dimension, entropy of the chaotic time series. The test proves that the chaotic dynamic system in encrypt is valid.Key Words: chaotic dynamic system chaotic neural unit Lyapunov exponent0.引言目前广泛研究的混沌神经网络模型是在Hopfield神经网络中引入了一个具有混沌特性的负反馈项,进而得到了混沌神经网络模型,因此在深入研究混沌神经网络之前,有必要先介绍一下Hopfield神经网络。
混沌神经网络中的超混沌
V12 o o2N. . 6
Dc20 e.06
Hale Waihona Puke 混沌 神 经 网络 中的超 混 沌
徐耀群 , 孙 明, 杨树 文
( 哈尔滨商业大学 系统工程研究 所 , 黑龙 江 哈尔滨 10 2 ) 50 8
摘 要: 神经网络是高度复杂的非线性动力系统, 存在着混沌现象. 通过消除暂态混沌神经元的模拟
Ke od :hoi nua ntok Lauo xoethprho yw rscat er ew r;yp nvepnn;yeeas c l
人工神经网络系统是极度复杂的非线性动 力
利 用 了 暂 态 混 沌 的遍 历 搜 索 特 性 , 性 能 与 其
学 系统 , 是迄今所 知功能最强 、 效率最高的最 完美 的信息处理系统 , 因此 , 自然地成为非线性科学 很
Hy e c a so h oi e r ln t r p r h o fc a t n u a ewo k c
X Ya - u S n YA h - e U o q n, UN Mig, NG S u w n
(ntueo ytm E g er g H ri nvr t o o me e H ri 10 2 , h a Istt f s n i e n , abnU i sy f m r , abn 50 8 C i ) i S e n i e i C c n
Ab ta t e rl ewok i akn f ihyc mpe o l e rd n mi sse ,a d c a t sr c :N u a t r s ido g l o lxn ni a y a c y tm n h n n h o-
混沌控制及其应用
参数的模型算出对系统的适当的输出量, 如此
经过反复多次调整参数, 使混沌系统的混沌过
程最终达到所控制的目标。只有当控制目标对
应的参考信号达到时, 控制器才起作用, 从而
实现了真正的混沌控制。
3.5 混沌中非周期轨道的控制方法
示意图:
3.6 参数共振微扰法与外部周期微扰法 两种方法的机制是一致的, 参数共振微扰 法以研究杜芬系统为例, 在原杜芬方程中的项 的系数中加入一个弱周期微扰项, 所以受控杜 芬方程为: x- x+β[1+ηcosΩt]x3=- δx+γcosωt 3.7 传输和迁移控制法 该方法先假定目标轨道与给定动力学系 统具有相同的数学方程, 然后将两个方程叠加 起来, 从而研究如何迫使动力学系统的混沌传 输和迁移到目标轨道中去, 实现稳定控制。 4 混沌控制的应用 经过几十年的发展, 特别是最近十年来, 混沌控制与混沌同步及其应用的研究得到了蓬 勃发展, 并迅速成为研究领域的重要热点, 为 混沌的应用准备了必要的手段。关于控制和利 用混沌的例子有: 对混沌激光器、混沌二极管 电路实现的混沌控制大大地提高了激光输出功 率, 改善了激光性能, 在未来的“星球大战” 中或空间武器的研制中将会发挥独特的作用; 另外, 混沌控制在光学、等离子体、化学反 应、流体、电子回路、人工神经网络和生物系 统等大量实验和应用中得到验证, 并在众多领 域中有着广阔的应用前景。更深入地, 人的思 维与活动是有控制的混沌活动, 其意义与规律 远没有被人们认识和利用。可以预料, 随着控 制混沌方法的完善和普及, 它的应用领域也在 不断的扩大和深入, 控制和利用混沌的前景是 十分广阔和无美好的。
引言
的各种问题比通常想像的更不同。
控制和利用混沌是当前自然科学基础研
3 混沌控制的方法
混沌理论及其应用研究
e综述e 唐 巍等 混沌理论及其应用研究
23
蝶效应 仅仅是蝴蝶翅膀的一次小小扇动 就有可 能改变一个月以后的天气情况
图 对初值的敏感性
具有分形的性质 如图 所示 混沌的 奇 异吸引子在微小尺度上具有与整体自相似的几何结
构 对它的空间描述只能采用分数维
c神 经 网 络 将 混 沌 与 神 经 网 络 相 融 合 使 神 经网络由最初的混沌状态逐渐退化到一般的神经网
络 利用中间过程混沌状态的动力学特性使神经网
络逃离局部极小点 从而保证全局最优 可用于联想
记 忆 Z机 器 人 的 路 径 规 划 等 U图像数据压缩 把复杂的图 像数 据用一 组能
b 混沌的应用前景
混沌应用可分为混沌综合和混沌分析 前者利 用人工产生的混沌从混沌动力学系统中获得可能的
功能 如人工神经网络的联想记忆等Q后者分析由复 杂的人工和自然系统中获得的混沌信号并寻找隐藏
的确定性规则 如时间序列数据的非线性确定性预 测等 混沌的具体的潜在应用 可 ‘a 概括如下
优 化 利 用 混 沌 运 动 的 随 机 性Z遍 历 性 和 规 律性寻找最优点 可用于系统辨识Z最优参数设计等 众多方面
成 步 对每个固定的参量值 变量 从某一个
初值 统一用
开始迭代 舍去最初暂态
过 程的 个迭代值 再把后继 个轨道点都画
到所选参量的纵方向上 这样扫过全部的参量范围
图 为图 中小矩形区域的放大图
不断地经历倍周期分叉 最终达到混沌
称当
时由系统 产生的序列0 1为混
沌变量 混沌变量0 1的运动形式有如下特征
比例也趋于一个极限 >* 4?5435@A3@
B 混沌的识别
一种新的混沌神经网络及其应用_修春波
基金项目 : 国家自然科学基金( No . 10402003) ; 北京理工大学基础研究基金( No . BIT-UBF-200301F10)
第 5 期
修春波 : 一种新的混沌神经网络及其应用
[ 3] 再选取典型的测试 函数式( 10) 作为优化对象 .
869
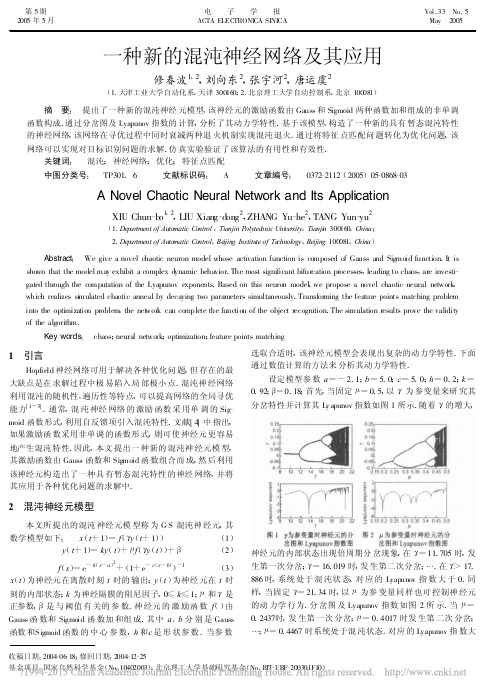
于0. 同时 , 从分岔图 中可 见 , 由于模 型的 激励 函数 为光 滑可 微的函数[ 5] , 因此在混沌带中夹杂着大量密集的周期窗 口 . 当 模型处于混 沌 状态 时 , 模 型 的内 部 状 态 y 的 运动 呈 现出 随 机 、遍历的特 点 . Ly apunov 指 数反 应 了 动力 系 统的 混 沌度 水 平 , Lyapunov 指数越大 , 则混 沌度 越大 , 而 此时 状态 遍历 的范 围也相应增大 . 在优化计算中 , 利用这些特点可使网络具有跳 出局部极值到达全局最优点的寻优能力 .
Abstract : We give a novel chaotic neuron model whose activation function is composed of Gauss and Sigmoid function . It is shown that the model may exhibit a complex dynamic behavior . The most significant bifurcation processes , leading to chaos , are investigated through the computation of the Lyapunov exponents . Based on this neuron model , we propose a novel chaotic neural network , which realizes simulated chaotic anneal by decaying two parameters simultaneously . Transforming the feature points matching problem into the optimization problem , the network can complete the function of the object recognition . The simulation results prove the validity of the algorithm . Key words : chaos ; neural network ; optimization ; feature points matching
用神经网络控制非线性系统的混沌运动
摘 要 : 计 前 馈 反 传 神 经 网络 , 过 对 参 数 扰 动 模 型 输 入 样 本 的 学 设 通
习 , 练 成 混 沌 控 制 器 , 嵌 入 在 混 沌 吸 引 子 中 不 稳 定 周 期 轨 道 镇 定 到 稳 定 训 将
控 制 目的 . 设 P ic r on ae映 射 为 F, 一 非 线 性 动 力 学 系 统 由下 面 迭 代 式 描 述 : 某
2 O世 纪 8 O年 代 兴 起 的 混 沌 科 学 以其 独 特 的 功 能 u , 起 了各 国 学 术 界 和 企 业 界 的 ]引
兴趣 , 为 最 新 型 智 能 计 算 的 3大 支柱 之 一 的混 沌 理 论 , 作 同样 激 发 了科 学 和 工 程 各 领 域 的
研究人员 去认识 、 解它: 了 .自从 1 9 9 0年 Ot E, e o i a dYo k 提 出利 用 参 数 t Grb g n r eJA C, 扰 动 镇 定 不 稳 定 混 沌 周 期 轨 道 这 一 有 效 方 法 以来 ( 以下 简 称 OGY 方 法 ) 各 种 控 制 方 ,
叠
不 动 点 . 用 He o n n映 射 作 数 值 仿 真 实验 , 明该 方 法 十 分 有 效 . 证
关 键 词 : 经 网 络 ; 制 器 ; 沌 ; 引 子 ; 值 仿 真 神 控 混 吸 数 中图分类号 : 23 TP 7 文献标识码 : A
Co r lf r Cha i oton U s n c nt o o otc M i i g ba k
Pr opa a i e a e w or g tng N ur lN t k
采用BP神经网络进行混沌运动控制
振 动 与 冲 击第25卷第5期J OURNAL OF V IBRAT I ON AND SHOCKVo.l 25No .52006采用BP 神经网络进行混沌运动控制国家自然基金(10372079),航空基础科学基金(03C53016)资助项目收稿日期:2005-07-24 修改稿收到日期:2006-09-19第一作者李 磊男,博士生,1983年2月19日生李 磊秦卫阳张劲夫(西北工业大学工程力学系,西安710072)摘 要 利用4层BP 神经网络对非线性非连续函数的无穷逼近特性,设计了控制方法,对非线性系统的混沌运动进行控制。
在系统发生混沌运动时,对于不同类型的期望信号,可以将不同自由度的混沌运动分别控制到各自的目标信号上。
目标函数可以是周期函数,非线性函数。
对L orenz 方程进行了仿真计算,结果显示可以将混沌运动控制到锯齿波信号、正弦信号和直流信号上;对R ossler 方程的仿真计算,可以将系统的混沌运动控制到方波信号与直流信号上,控制所用的时间很短。
关键词:神经网络,混沌运动,控制,目标函数中图分类号:O 322 文献标识码:A0 引 言非线性振动系统在一定的参数情况下,会发生混沌运动[1,2]。
如何设计控制方法,将非线性系统的混沌运动控制到稳定的周期轨道上,是一个比较困难的问题。
OGY 方法[3]是最早提出的混沌控制方法,它通过连续对系统的参数施加小扰动,使在混沌运动中的目标周期轨道稳定,从而达到控制效果。
但是这种方法精度不高,而且控制时间不能确定。
1997年Chen G R [4]对于混沌系统的可控性进行了比较全面的分析,从Lyapunov 稳定性理论出发,给出了混沌控制的必要条件。
目前,混沌控制的新方法不断出现,如反馈控制方法[5],它是利用系统变量作为反馈信号去控制系统的混沌运动,但对于高维系统,进行控制时要计算其Lyapunov 指数来确定参数的取值。
Cao Y J [6]采用相空间重构的方法,对于未知的非线性动力系统,由输出量及其高阶导数构造控制向量,对于混沌运动进行控制,通过数值仿真计算证明取得了很好的效果。
混沌神经网络模型及其应用研究
科 技论研 究
高 春 涛
( 尔滨 商 业 大 学基 础 科 学 学 院 , 哈 黑龙 江 哈 尔滨 10 0 ) 50 0
摘 要: 介绍了两种混沌神经网络模型 , 了其构成和特点 , 了混沌神经网络的主要应用领域, 分析 综述 并试探『 生地指 出了混沌神经网络的发展趋势。 关键词: 混沌; 人工神经网络; 混沌神经网络 1概 述 3混沌神经网络模型 人工神经网络理论是 2 0世纪 8 0年代在国 描述混沌神经网络 的模型主要有 A hr 依 iaa 0 抑制 ) ( , 其他 际上迅速发展起来的—个前沿研究领域。 近年来 , 据动物试验提 出的模型和 I u 依据 Lg t 映 n e o oii sc 更是掀起了一股人工神经网络研究 、开发应用的 象提出的模型两种。 s 是同步的临界参数。 热潮。 由于神经网 络是高度非线性动力学系统, 又 3 i r 的混沌神经网络模型 .Ah a 1 a 接着, o e I u 等又用一个混沌振荡子实现上 n 是自 适应 自 组织系统, 可用来描述认知、 决策及控 19 年 , i r 等目 0 A h a 在前人推导和实验的基 述功自 9 a 。进而 , oe I u 等又将上述晴况推广到模拟 n 制等智能行为 , 使得智能的认知和模拟成为神经 础上 , 给出了—个混沌神经元模型: 态口 。另外, 据相关文献日 苣已有对上述两类模型 报j 网络理论研究的一个重要方面,而这方面的研究 『 M , 1 的结合进行的 研究。 与我们对人脑结构的认识和研究有着密切的关 除上述两种模型外 , 还有多种混沌神经网络 j l = = rO l 系。 事实上, 神经网络理论研究的前沿问题将渗透 模型 , 其中由w n 等基于 E l 离散化 H p e ag ur e ofl id 到 2 世纪科学的挑战性问题中。然而, 1 由于人类 其 中, 1 x ) 是在离散时刻 t 时第 i + l 个神经 网络提出的一种通过改变其时间步长进行混沌模 对真实生物神经系统只了解非常有限的一部分, 元的输出, 取 1 x ( 激活) 0非激活 ) U 或 ( 。 定义如: 拟退火的神经网络模型,以及通过 H p e 网络 of l id 对于 自 身脑结构及其活动机理的认识还 十分肤 中引入混沌噪声的神经网络模型也是较为常见的 ) 一 浅,当今的神经网络模型实际上是极为简略和粗 混沌神经网络模型。 糙 , 目是带有某种先验的。因此 , 并 人 神经网络 w (≠j i ) 是第 j 个神经元激活 r1 + 个时间单 4混沌神经网络的主要应用 的完善与发展有待于神经生理学 、神经解剖学的 位后影响第 i 个神经元的联结权值 , W 是第 i 个 随着混沌神经网络 的研究 , 混沌神经 网络的 研究给予更加详细的信息和证据l ¨ o 神经元激活 什1 个时间单位后保持的对 自己的影 应用也逐渐为人们所重视 , 近几年来混沌神经网 混沌是近代非常引人注 目的热点研究 , 它掀 响的记 系数 , 与不应性相对应, 是第 i 0 个神经 络以其独特的结构和处理信息的方法 , 在许多实 起 了继相对论和量子力学以来基础科学的第j次 元的 全或无激活的阈值。 这里, 不应性指神经元激 际领域中 取得了显著的成效 , 主要应用如下 大革命。 科学中的混沌概念不同于古典哲学与 日 活后其阈值增加的性质。 l混沌的优化算法 常生活语言中的理解 , 简单地说 , 混沌是一种确定 由混沌神经元构造混沌神经网络时 , 要考虑 混沌具有不重复地经历一定 范围内的所有 的系统中出现的无规则的运动。混沌理论所决定 几个不同于普通神经网络的方面: 类似 H p e 状态的遍历 。利用这一特点, of l i d 混沌可以有效的避 的是非线性动力学混沌。目的是揭示貌似随机的 结构 的 自 来 内部神经元的反馈项和类似 B 算法 免在搜索全局最优解的过程中陷入局部最小解 , P 现象背后可能隐藏的简单规律 ,以求发现一大复 的外部输入项, 以及不应性响应和阈值。因此描述 它和禁忌搜索、 模拟退火 、 遗传算法等一样都可以 杂问题普遍遵循的共同规律。 混沌神经网络的数学模型为: 有效的避免局部最小 ,使得神经 网络不用再利用 从2 O世纪 9 年代开始 , 0 人们发现人脑中存 其它的启发式算法来减少这一缺陷造成的解质量 ‘f1 l ( ) ∑ ∑ .= r+ ) ) 在着{沌现象 , 昆 利用混沌理论可解释人脑中某些 不高的问题。而且 , 混沌也是具有内在规律性的, 不规则的活动 , 因此, 混沌动力学为人们研究神经 是由确定性的迭代产生的、 介于确定性和随机性 ∑ ( )n (( ) 之间, ∑k ,卜r ∑k, 卜r一 I g‘ ) 网络提供了新的契机 ,并 由此产生了对神经网络 具有丰富的动力学行为, 系统的演变可以导 和混沌现象相互融合的研究,并于 19 9 0年 K — Ad 其中, M是混沌神经元的个数 , N是外部输入 致吸引子的转移。所以利用混沌的这两个特性可 hr T aa e ee, . k b 等人根据生物神经元的混沌特性 个数 , T w. 是第 j 个混沌神经元到第 i 个混沌神经 以在搜索过程中达到良好的 优化效果。 4 混 沌 的预测 2 首次提出 混沌神经网络模型 , 将混沌引入神经网 元的联结权值, v 是第 i 个外部输入到第 i 个混沌 £ 个混沌神经元的连续 预测系统是一个复杂的动力学系统, 由于混 络中, 使得人工神经网络具有混沌行为, 更加接近 神经元的联结权值 ,是第 i 实际的人脑神经网络。 输出函数 ,j h是第 j 个混沌神经元 的内部反馈函 沌系统对初值的敏感眭, 混沌系统的长期预测是 2 混沌与神经网络的结合 数,f r I_) I 是离散时刻 tr i - 第 个外部输入的强度,. 不可能的, g 但基于 La u o 指数可以进行短期预 yp nv 测。 混沌预测是基于相空间重构的预测方法: 由标 混沌是一种非线性的动力学行为,而 H p 是第 i o— 个混沌神经元的不应性函数。 i d f l 结构正是神经网络与非线性动力学行为的良 e 3 nu 等的混沌神经网络模型 . Io e 2 量观测数据构造延时坐标,得到与原始相空间轨 好结合 ,因而它 可 以作 为研究 混沌神 经 网络 19 年 loe等以耦合的混沌振荡子作为 线微分同胚的重构相空间轨线,从而得到以相空 9 1 nu ( N 的基础网络圈 B 算法可用来观察 、 C N) ;P 学习混 单个神经元,提出了另一种构造混沌神经网络的 间点映射表达的动力学行为 , 据此可推测系统下 沌动力学系统 , 用被破坏的输入数据集重构二维 方法 耦合的混沌振荡子的同步和异步分别对应 个状态点位置, 。 取出合适的延时坐标分量 , 得到 混沌系统的吸引子, 得到相应的几何信 息。 神经元的激活和抑制两个状态。虽然混沌是由简 下一个时刻观测数据的预测位置 混沌神经 网络的研 究起于并基于混沌神经 单的确定性规则产生的,但它包含规则性和不规 4 . 3混沌 的动 态联 想记 元的研究 混沌神经元是构造混沌神经网络的基 则性两个方面。耦合的混沌振荡子的同步来自规 利用混沌系统对初值的敏感依赖性, 有可能 本单位对 于单个神经元的混沌特征的了解可为混 则性 , 而不规则 性可产生随机搜索能力。 对于离散 对仅有微小区别的记忆模型进行识别。 假设把混 己『 乙 l 沌神经网络提供必要前提和认识基础。混沌神经 时间, 耦合的振荡子的运动方程由 和 艏 述 沌吸引子看作一个记忆单位来表示网络所 }J 的 元的研究中, 振荡子是一种典型的 研究对象 因为 ‘ 1 , ()口(E , +) ( n+ ny 1 +) 3 某一特定信 息,通过调整参数改变网络动力学行 = ) ) +) 一 1 ) i( 振荡子或它们的组合可表现出丰富的混沌动力学 Yn 1 g n + (I n 1 (+) () 为, 就可以实现动态记 。 动态记 是指对贮存的 +) ( ) n (+) n 1 ( = () ) 一 l 4 行为。 对于在动力系统平衡点不满足 Lp ht条 isc i z 其中 《是时刻 n i n 1 第 个神经元的 耦合系数, 信息ii变换或者处理 。 井亍 相空间的—个周期轨迹 , 件所引起的极限混沌的现象的研究显示 :神经元 x n Y n l 和 _ 分别是时刻 n i ( ) f 1 第 个神经元第一和第 可以作为一
混沌神经网络的应用和简介(1)
取能量函数为:
dik为城市i到城市k的距离; xij表示以顺序j访问城市i; 参数A= B,一个全局最小的能量值代表一条最短的有效路径
6. SLF 混沌神经网络及其应用
选取20个城市归一化后的坐标,取值分别为:
在SLF混沌神经网络模型中,选取参数:A=B=1,D=2,α=0.4,k=1,I0=0.5,ε=0.02, z(1) =0.8,β=0.002,λ=1/3。每次运行程序时,在区间(-0.1,0.1)内100次随机赋予xij初 值,程序共运行5次,其仿真结果如下表所示,结果显示模型具有较好的求解此问题的 能力。
6. SLF 混沌神经网络及其应用
选取参数ε0=0.02,k = 1,α = 0.1,I0 = 0.56,β = 0.002,y(1) = 0.383,y(2) = 0.283,z1(1) = z2(1) = 0.98,λ = 1/2时,神经网络模 型求解优化函数f的能量函数演化图如下图:
6. SLF 混沌神经网络及其应用
4. 混沌神经网络的构造
15
5. 混沌神经元的性质
神经元的暂态混沌动力学行为可以通过倒分岔图和最大Lyapunov指数时间演 化图来考察,选取参数ε0=0.02,y(1)= 0.1,z(1)= 0.98,k =1,Io= 0.56,β = 0.001,λ = 1/3时神经元的倒分岔图和最大 Lyapunov指数时间演化图:
Evolution Computing
Chaotic Dynamics
Neural Network
Fuzzy System
Brain and Cognition
Large-scale Combinatory Optimization
Evolution Quantum Computing Software
强流束晕-混沌的RBF神经网络控制
分 布束 , 其包络运 动 方程 仍 为 ( )式. 自生 场作 用 1 在
下, 根据粒子 束核模 型 , 各离子沿 z Y方 向的径 向运 , 动方 程分别 为E 3 3
神经 网 络控 制作 为智 能控 制科学 技术 重要 的分
2 1 年 9月 O1
Se 2O1 p. 1
文 章 编 号 : 2 32 2 ( 0 1 0 —2 10 0 5 —3 8 2 1 )30 3—4
强流束晕一 混沌 的 R F神 经 网络 控 制 B
高 远 ,袁 海 英 ,孔 峰 ,谭 光 兴
( 西 工 学 院 电 子 信 息 与 控 制 工程 系 , 西 柳 州 5 5 0 ) 广 广 4 0 6
第3 卷 第3 2 期
Vo _ 2 NO 3 I3 .
宁 夏 大 学 学报 ( 自然 科 学 版 )
J u n lo n x a Un v r iy Na u a ce c i o ) o r a fNi g i ie st ( t r l in e Edt n S i
P io os n电位 方 程 的 电 荷 自生 场 . 粒 子 模 型 可 以 s 多
布束作 为 对象 , 研究 了束 晕一 混沌 的径 向基 函数 神经 网络 ( B NN) R F 控制 方法 .
通过 P C p ril i e1程 序数 值求 解. I ( at e ncl c )
() 具 有 幅度 为 / , £是  ̄ 占空 比为 r的单 极 性周 期 方 o
用 于 外 部磁 场 调节 的参 数 控 制 方法 [ . 者 设 计 6 前 。]
波 . 虑 多粒子 空 间 电荷 所 引起 的 自生 场 , 于 K V 考 对 -
6 混沌控制

• (3)从理论物理的角度,可将混沌分为耗散系统 混沌、保守系统混沌与量子系统混沌。 耗散与保守系统的混沌又统称经典混沌,一 般讨论都是针对这类混沌。当所有初值信息消失后 耗散系统的混沌运动会达到它的终态-奇怪吸引子, 而保守动力学系统中不存在任何类型的吸引子,这 是耗散系统浑混沌与保守系统混沌的根本区别。对 耗散系统中的混沌的研究主要是对奇怪吸引子的研 究。对保守系统混沌的研究则具有更基本的物理学 理论意义。量子混沌是一个充满更多未知因数和充 满争论的问题。量子混沌的含义也往往只要求它具 有混沌的基本特征,即对初始条件的敏感依赖性。
对于不同的混沌系统A和B,若它的相应的混沌度向量 β1和β2之间满足:β1>β2(或β1<β2),则就可断言系统A 的混沌度高于(或低于)系统B的混沌度;当然,若β1=β2, 则它们具有同样的混沌度。这样以各种混沌系统的浑 沌度向量β构成的集合具有一种半序结构。 还有一种情况需要讨论,那就是如果2个系统的混沌度 向量β1=(λ1,m1,d1)和β2=(λ2,m2,d2)之间有如下 关系λ1>λ2,m1>m2,d1<d2,或λ1>λ2,d1>d2, m1<m2,等等, 那么,我们就无法用上述规则来判断 是β1>β2还是β1<β2?为此,给出如下定义。 定义2: 若混沌系统的混沌度向量为β=(λ,m,d),则称 数值γ=p1λ+p2m+p3d为该系统的混沌指数,其中 i>0(i=1,2,3),且Σpi=1。
(1)方法及分类
• 从目前已经获得的控制方法的控制原理上看, 混沌控制方法可分为微扰反馈控制法及无反馈 控制法。微扰反馈控制法的反馈对象可以是系 统参数、系统变量或者外部参数,其共同点都 是利用与时间有关的连续小微扰作为控制信号, 当微扰趋于零或变得很小时,就实现了对特定 周期轨道或非周期轨道的稳定控制。无反馈控 制法则与系统的特定轨道无关,当系统达到目 标时,控制的输入信号也并不趋于零,并且受 控后的动力学行为可能与原系统的行为大不相 同,即产生了新的动力学行为。
控制混沌及其在航天器姿态动力学中的应用

控制混沌及其在航天器姿态动力学中的应用混沌现象是自然界普遍存在的一种现象,最早是由美国的科学家洛伦兹在1963年提出的。
简单地说,混沌是指非线性系统的随机性行为,其状态不断变化且相互耦合,这种行为是不可预测的,因此也被称为“确定性混沌”。
控制混沌是指通过一定的方法和策略,使原本处于混沌状态的系统恢复到有序稳定状态的过程,也被称为“混沌控制技术”。
这种技术可以应用于多个领域,例如航天器姿态动力学控制。
航天器姿态动力学是指航天器的姿态运动和动力学过程。
在航天器的飞行中,由于各种因素的影响,航天器很容易进入混沌状态,导致飞行的不稳定和危险。
因此,控制混沌技术在航天器姿态动力学中具有重要的应用价值。
以下是控制混沌技术在航天器姿态动力学中的应用步骤:第一步:仿真模型的建立混沌控制技术需要先建立航天器的姿态动力学模型,并通过计算机仿真来模拟混沌状态下的航天器运动过程。
在实际应用中,需要考虑到多种因素的影响,例如气动力,惯性效应,环境干扰等。
第二步:确定混沌状态通过模拟数据,可以通过图像显示、频谱分析等方式确定航天器是否处于混沌状态。
混沌状态的特点是无法重复和预测,因此需要在控制之前确定混沌状态,以便为控制提供数据基础。
第三步:确定混沌控制策略混沌控制技术有多种策略,例如传统的分散控制和集中控制,自适应控制等。
根据航天器的实际情况和目标,选取适合的控制策略,并通过仿真验证其稳定性和有效性。
第四步:控制验证通过仿真实验,验证混沌控制策略的实际效果。
这一步需要考虑多种场景下航天器的姿态变化和控制响应。
如果控制策略设计合理,具有很好的鲁棒性和实时性,可以有效地控制航天器的姿态运动。
综上所述,混沌控制技术在航天器姿态动力学中有广泛的应用前景。
通过合理的控制策略设计和仿真验证,可以有效地解决航天器飞行过程中存在的混沌问题,提高航天器的飞行稳定性和安全性。
一种新的基于神经网络的混沌控制方法研究_图文(精)
技术创新《微计算机信息》(测控自动化2010年第26卷第9-1期博士论坛一种新的基于神经网络的混沌控制方法研究A new chaotic system controll methods using neural networks(1.武汉理工大学;2.许昌职业技术学院郭长庚1连智锋2钟珞1GUO Chang-geng LIAN Zhi-feng ZHONG Luo摘要:给出了一种新的基于神经网络的混沌控制方法。
用多变量插值的径向基函数神经网络构建遗传算法对系统进行混沌控制,并提出了具体的学习算法。
计算机仿真表明该算法网络学习的速度快,并且良好的设计能够成功地避免局部极小问题。
关键词:混沌控制;遗传算法;神经网络中图分类号:TP273文献标识码:BAbstract:A new kind of methods is presented for controlling chaotic dynamical systems using neural networks.Applying Radial Basis Function(RBFneural networks to construct controlling system,we discuss its learning algorithms.The results indicated that this method is effective.Key words:chaos controlling;genetic algorithm;neural network文章编号:1008-0570(201009-1-0003-031引言混沌是现在的前沿课题及学术热点,它揭示了自然界及人类社会中普遍存在的复杂性,大大拓宽了人们的视野,加深了人们对客观世界的认识。
控制是通过改变系统的结构或参数使受控系统的运动达到预期的运动行为的过程,而混沌控制是通过微小控制量的作用使受控混沌系统脱离混沌状态的过程。