PLC应用实例
几个西门子PLC经典实例详解(含程序)

几个西门子PLC经典实例详解(含程序)
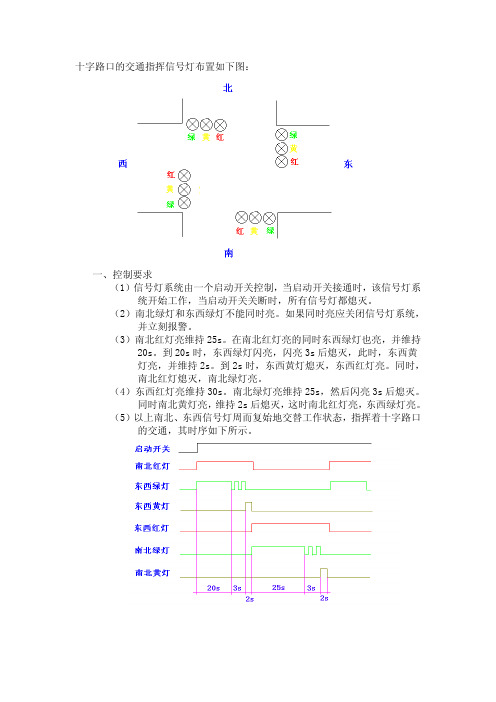
十字路口的交通指挥信号灯布置如下图:
一、控制要求
(1)信号灯系统由一个启动开关控制,当启动开关接通时,该信号灯系统开始工作,当启动开关关断时,所有信号灯都熄灭。
(2)南北绿灯和东西绿灯不能同时亮。
如果同时亮应关闭信号灯系统,并立刻报警。
(3)南北红灯亮维持25s。
在南北红灯亮的同时东西绿灯也亮,并维持20s。
到20s 时,东西绿灯闪亮,闪亮3s 后熄灭,此时,东西黄灯亮,并维持2s。
到2s 时,东西黄灯熄灭,东西红灯亮。
同时,南北红灯熄灭,南北绿灯亮。
(4)东西红灯亮维持30s。
南北绿灯亮维持25s,然后闪亮3s 后熄灭。
同时南北黄灯亮,维持2s 后熄灭,这时南北红灯亮,东西绿灯亮。
(5)以上南北、东西信号灯周而复始地交替工作状态,指挥着十字路口的交通,其时序如下所示。
二、PLC 接线
三、定义符号地址
四、梯形图程序。
plc控制实例200例

plc控制实例200例English Response:Introduction:Programmable logic controllers (PLCs) are widely used in industrial automation and control systems. These devices are capable of performing complex logic operations, sequencing, and data manipulation, making them a versatile solution for various industrial applications. This article presents 200 exemplary PLC control instances that showcase the diverse capabilities of PLCs in various industries.Process Control:1. Temperature control in a manufacturing process: A PLC monitors temperature sensors and adjusts the flow of heating or cooling media to maintain the desired temperature within a specific range.2. Level control in a chemical storage tank: A PLC monitors level sensors and controls the opening and closing of valves to maintain the liquid level within predetermined limits.3. Pressure control in a hydraulic system: A PLC monitors pressure sensors and adjusts the pump speed or valve position to maintain the desired pressure level.Motion Control:4. Conveyor belt control: A PLC controls the speed and direction of a conveyor belt, ensuring smooth material transportation.5. Robotic arm control: A PLC coordinates the movements of a robotic arm, enabling it to perform precise tasks such as assembly or welding.6. Stepper motor control in a machine tool: A PLC precisely controls the movement of a stepper motor, ensuring accurate positioning of cutting tools.Real-Time Monitoring and Data Acquisition:7. Data logger for a water treatment plant: A PLC collects and stores data from sensors monitoring water quality parameters, providing a comprehensive record for analysis and optimization.8. Traffic monitoring system: A PLC records traffic flow data from sensors and displays the information on variable message signs, optimizing traffic patterns.9. Energy consumption monitoring in a building: A PLC tracks the energy usage of different systems and devices, enabling energy-saving measures.Industrial Automation:10. Assembly line control: A PLC coordinates the sequence of operations on an assembly line, ensuring efficient and synchronized product assembly.11. Packaging machine control: A PLC controls the filling, sealing, and labeling operations of a packaging machine, reducing manual labor and waste.12. Machine vision inspection: A PLC integrates with a machine vision system to automatically inspect products for defects, ensuring quality control.Safety and Emergency Response:13. Fire detection and alarm system: A PLC monitorsfire sensors and triggers evacuation alarms and sprinkler systems in case of a fire.14. Gas leak detection and shutdown: A PLC monitors gas sensors and initiates emergency shutdown procedures to prevent accidents.15. Emergency stop system in a manufacturing facility:A PLC detects emergency stop signals and activates safety measures such as machine shutdown and personnel evacuation.Other Applications:16. Lighting control in a warehouse: A PLC manages the on/off status of lighting fixtures based on daylight availability and occupancy sensors, optimizing energy efficiency.17. Irrigation control in a greenhouse: A PLC regulates the flow of water to plants based on soil moisture sensors, ensuring optimal plant growth.18. HVAC system control in a commercial building: A PLC monitors temperature and humidity levels and adjusts the operation of heating, ventilation, and air conditioning systems for comfort and energy conservation.中文回答:简介:可编程逻辑控制器 (PLC) 广泛应用于工业自动化和控制系统中。
第9章 罗克韦尔PLC工程应用实例

景观喷泉PLC控制系统潜水泵输入/输出信号分配如表9-1所示。
3.控制系统的软件设计 景观喷泉潜水泵启动联锁梯形图如图9-1所示。
景观喷泉潜水泵停止联锁梯形图如图9-2所示。
4.系统应用分析 采用PLC控制潜水泵,从而实现景观喷泉的喷水效果。与传统继电器或单片机 控制系统相比,PLC控制系统具有更高的可靠性、灵活性和经济实用性。
现地控制单元构成示意图如图9-5所示。
现地控制屏柜示意图如图9-6所示。
(2)现地控制单元设备配置 机组现地控制单元LCU的设备配置如表9-2所示。
设备名称
彩色液晶触摸屏 数据采集单元PLC 智能电力监测仪 同期装置 有功、无功变送器 电压变送器 交/直流供电电源 继电器 常规紧急停机回路直流继电器 电源防雷器 机柜及其附件
5.输煤PLC控制系统的主要技术特点 系统启动按逆煤流方向顺序启动,按顺煤流方向停机,异常时按顺煤流方向
联锁停机。
操作方式:程控、遥控、就地控制。 运行路径选择,设备工况监视和报警。 给煤机出力调节。 每条皮带有速度信号、打滑信号、跑偏信号等。 落煤管处装有堵煤信号。 电厂来煤/卸煤沟出煤/原煤仓进煤计量。 原煤仓煤位测量,集灰斗灰位测量。 原煤仓配煤控制。 可与工业电视接口。
嵌装Ethernet接口 32通道DI 32通道DO 16通道AI 电源模块
开关站及公用LCU的设备配置如表9-5所示。
模块名称 CPU模块 数字量输入模块 数字量输出模块 模拟量输入模块 型号及规格 1756-L63 1756-IB32 1756-OB32 数 1 4 1 量 单 块 块 块 块 位 描 述
嵌装Ethernet接口 32通道DI 32通道DO 16通道AI
西门子PLC应用80例(经典实例)
Q0.0 ()
I0.0 M0.0 M0.1 M0.2 Q0.0
(a) 梯形图
(b) 时序图
分频电路
用一个按钮来实现启 动和停止两种控制。
方法一:利用计数器 实现单按钮控制功能
I0.0 C9 M0.0 M0.1
2 M0.0 Q0.0
P
C9 CU CTU
M0.0 ()
M0.1 ()
R
C9
(6)当电梯位于3层时,若下方仅出现2层的向上外呼信号SB12,即1层的向 上外呼按钮SB11不按,则电梯下降到2层,由行程开关SQ2停止电梯下降。
(7)电梯在上升途中,不允许下降。 (8)电梯在下降途中,不允许上升。
下面我们逐条对上面的动作要求(1)~(8)用逻辑设计法进行设计:
对(2):这条输出也是电梯上升,进入条件为 SQ1·SB12,退出条件为 SQ2 动作。因此, Q0.0 的逻辑方程为:
Q0.0 KM1 I0.4 SQ2
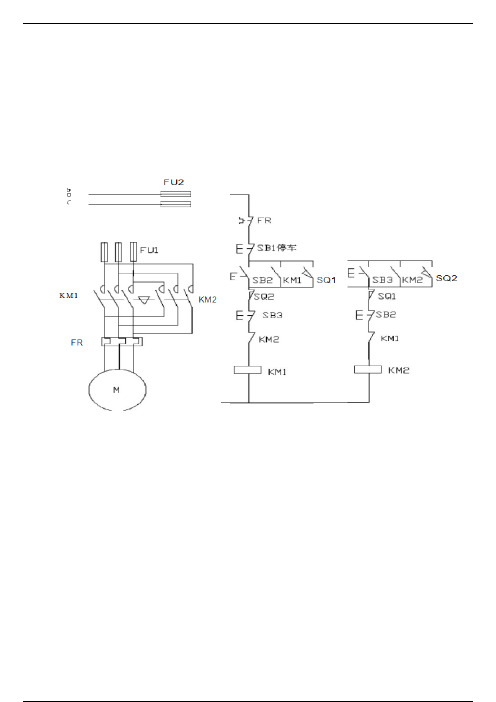
异步电动机主电路
PLC外部接线图
按钮连锁
软件互锁
解:1) 列出所有I/O点并分配地址
a) 代入开启条件
消铃信号
b) 将消铃信号变成长信号
消铃信号
c) 代入关断条件
消铃信号
d) 加入测试信号
消铃信号
3. 控制要求 (1)用启动和停止按钮控制电动机M运行和停止。在电动机运行时,被检 测的产品(包括正次品)在皮带上运行。
(1)控制任务:有3个抢答席和1个主持人席,每个抢答席上各有1个抢答 按钮和一盏抢答指示灯。参赛者在允许抢答时,第一个按下抢答按钮的抢
答席上的指示灯将会亮,且释放抢答按钮后,指示灯仍然亮;此后另外两
个抢答席上即使在按各自的抢答按钮,其指示灯也不会亮。这样主持人就
欧姆龙PLC应用86例(经典实例)

T0001
1.03 0.00
1.01 (电磁阀YV1)
1.02 (电磁阀YV2) 1.00 (接触器) TIM0000 # 0600 1.03 (电磁阀YV3)
TIM0001 # 0020 W2.00 (停机记忆)
END
END
0000 0001 0002 0501
0000 0001
0500 0500
低液位L 0.04
第 1梯级 第 2梯级 第 3梯级
第 4梯级
第 5梯级
0.00 1.01 0.03 0.02
T0000 1.03 0.04
0.03
1.00 T0000
T0001
初步设计的梯形图程序还存在哪些问题?
1.01 (电磁阀YV1)
1.02 (电磁阀YV2) 1.00 (接触器) TIM0000 # 0600 1.03 (电磁阀YV3)
STEP(08)
HR0000~ HR0004 是控制位
程序流程图
00000 00001
步A
步C
00002
00004
步B
步D
00003 00005
步E
条件
00006
步结束
00000ON、00001OFF
00000 00001 SNXT(09) 步开始
00001 00000
HR0000 启动步A
SNXT(09)
当转换开关SA闭合时,其常闭触点00003断开,常开触 点闭合,按下00002按钮,输出线圈01000得电,松开00002 按钮,输出线圈01000失电,实现点动控制。
(1)控制要求
1)启动:SB1→KM得电,Y接法 启动,电动机M进入正常运转。 2)停止:SB2→KM失电,电动机 M停止。 3)过载保护:过载时,FR常开触 点闭合→ KM失电,电动机M停止, 报警灯H闪烁。
基于PLC 控制的自动门系统(实例)

• 采用三菱FX系列PLC进行控制。
• ①输入信号 • 焊枪应能手动和自动控制,用SA1选择开关来进行转
换,1为自动,0为手动; SB1为焊枪自动启动按钮; SB2为急停按钮;焊接控制器故障报警信号TC25和焊 接结束信号TC23需输入到PLC;设置焊枪后位行程 开关SQ1、前位行程开关SQ2、下位行程开关SQ3、 上位行程开关SQ4;气动系统压力开关SP。这样共需 输入点10个。 • ②输出信号 • 焊枪需要前进/后退、上升/下降及加压,则需要3只 气缸进行驱动,共5个电磁阀,设前进/后退电磁阀为 YV1A、YV1B;上升/下降电磁阀为YV2A、YV2B; 加压电磁阀为YV3;启动焊接控制器需中间继电器 KA1;气源故障指示灯为HL1、焊接故障报警指示灯 为HL2。这样共需输出点8个。
输送装置主要由托板、托板的输送装 置、抓取板件的机械手等机构组成,完 成工位间部件的输送任务。
• 现在以某焊接生产线上的一把自动焊枪为例,介绍 焊枪PLC控制系统设计方法。
• 控制要求:
• ①此自动焊枪可以进行手动和自动控制。
• ②能够完成2个焊点的焊接任务。
• 焊枪要完成2个焊点的自动焊接任务动作程序为:原 点自动启动→上升→加压→焊接1→卸压→下降→前 进→上升→加压→焊接2→卸压→下降→后退→原点 结束。
在关门过程中,当有人员出现在光电探测开关(X6、X7) 探测范围内时,立即停止关门,并自动进入开门程序。电机 驱动器故障报警时,也停止关门。
输入:
X1 关门到位限位开关SQ1; X2 开门到位限位开关SQ2; X3 选择开关S3拨到手动开门方式;
6个简单实用的PLC程序实例分析
找钱指示灯亮,表示找钱动作,并退出多余的钱。 参考答案:
1
2
3
4
5
设计程序,使两个气缸顺序动作,其顺序为:A1B1B0A0。 (一)气控回路
(二)位移-步骤图 1 2 3 4 5=1
1 A 0 1 B 0 (三)I 型障碍信号分析
(四)PLC 接线
(五)定义符号地址 (六)梯形图程序
自动售货机的 PLC 控制 如下图所示的自动售货机示意图,其工作要求如下:
12
2
3、1
升 上升到 3 层停
13
3
2、1
降
先降到 2 层暂停 2S 后,再降到 1 层停
14
任意 任意
任意
楼层间运行时间必须小于 10S,否 则停
多种液体自动混合装置的 PLC 控制 如图所示为三种液体混合装置,SQ1、SQ2、SQ3 和 SQ4 为液面传感器, 液面淹没时接通,液体 A、B、C 与混合液阀由电磁阀 YV1、YV2、YV3、 YV4 控制,M 为搅匀电动机,其控制要求如下:
3.停止操作 按下停止按钮 SB2 后,要将当前的混合操作处理完毕后,才停止操 作(停在初始状态)
参考程序:
霓虹灯广告屏控制器的设计 用 PLC 对霓虹灯广告屏实现控制,其具体要求如下:
该广告屏中间 8 个灯管亮灭的时序为第 1 根亮→第 2 根亮→第 3 根 亮→…→第 8 根亮,时间间隔为 1s,全亮后,显示 10s,再反过来从 8→7→…→1 顺序熄灭。全灭后,停亮 2s,再从第 8 根灯管开始亮 起,顺序点亮 7→6→…→1,时间间隔为 1s,显示 20s,再从→2→…→8 顺序熄灭。全熄灭后,停亮 2s,再从头开始运行,周而复始。 参巧梯形图程序:
PLC控制伺服电机应用实例
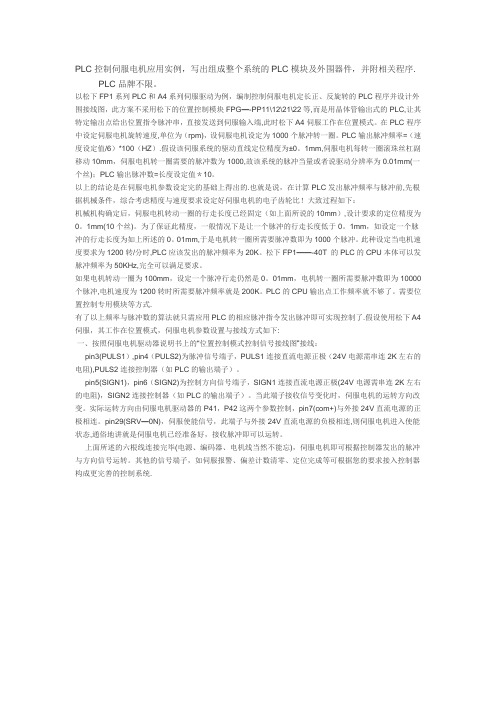
PLC控制伺服电机应用实例,写出组成整个系统的PLC模块及外围器件,并附相关程序.PLC品牌不限。
以松下FP1系列PLC和A4系列伺服驱动为例,编制控制伺服电机定长正、反旋转的PLC程序并设计外围接线图,此方案不采用松下的位置控制模块FPG—-PP11\12\21\22等,而是用晶体管输出式的PLC,让其特定输出点给出位置指令脉冲串,直接发送到伺服输入端,此时松下A4伺服工作在位置模式。
在PLC程序中设定伺服电机旋转速度,单位为(rpm),设伺服电机设定为1000个脉冲转一圈。
PLC输出脉冲频率=(速度设定值/6)*100(HZ).假设该伺服系统的驱动直线定位精度为±0。
1mm,伺服电机每转一圈滚珠丝杠副移动10mm,伺服电机转一圈需要的脉冲数为1000,故该系统的脉冲当量或者说驱动分辨率为0.01mm(一个丝);PLC输出脉冲数=长度设定值*10。
以上的结论是在伺服电机参数设定完的基础上得出的.也就是说,在计算PLC发出脉冲频率与脉冲前,先根据机械条件,综合考虑精度与速度要求设定好伺服电机的电子齿轮比!大致过程如下:机械机构确定后,伺服电机转动一圈的行走长度已经固定(如上面所说的10mm),设计要求的定位精度为0。
1mm(10个丝)。
为了保证此精度,一般情况下是让一个脉冲的行走长度低于0。
1mm,如设定一个脉冲的行走长度为如上所述的0。
01mm,于是电机转一圈所需要脉冲数即为1000个脉冲。
此种设定当电机速度要求为1200转/分时,PLC应该发出的脉冲频率为20K。
松下FP1——-40T 的PLC的CPU本体可以发脉冲频率为50KHz,完全可以满足要求。
如果电机转动一圈为100mm,设定一个脉冲行走仍然是0。
01mm,电机转一圈所需要脉冲数即为10000个脉冲,电机速度为1200转时所需要脉冲频率就是200K。
PLC的CPU输出点工作频率就不够了。
需要位置控制专用模块等方式.有了以上频率与脉冲数的算法就只需应用PLC的相应脉冲指令发出脉冲即可实现控制了.假设使用松下A4伺服,其工作在位置模式,伺服电机参数设置与接线方式如下:一、按照伺服电机驱动器说明书上的“位置控制模式控制信号接线图”接线:pin3(PULS1),pin4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
常见的PLC程序实例详解
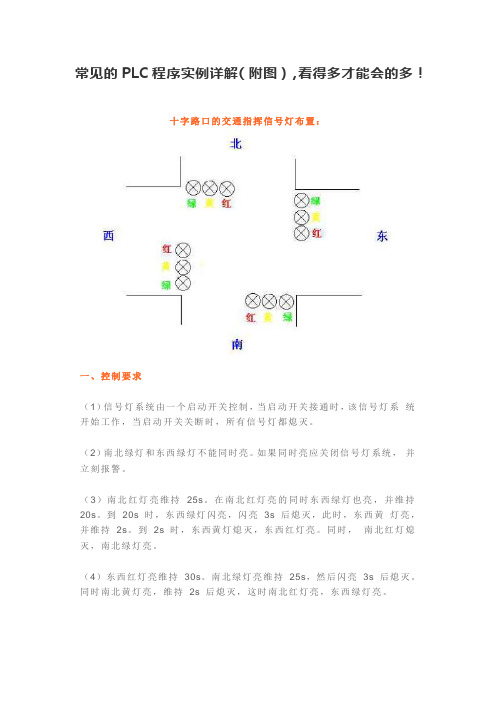
常见的PLC程序实例详解(附图),看得多才能会的多!十字路口的交通指挥信号灯布置:一、控制要求(1)信号灯系统由一个启动开关控制,当启动开关接通时,该信号灯系统开始工作,当启动开关关断时,所有信号灯都熄灭。
(2)南北绿灯和东西绿灯不能同时亮。
如果同时亮应关闭信号灯系统,并立刻报警。
(3)南北红灯亮维持25s。
在南北红灯亮的同时东西绿灯也亮,并维持20s。
到20s 时,东西绿灯闪亮,闪亮3s 后熄灭,此时,东西黄灯亮,并维持2s。
到2s 时,东西黄灯熄灭,东西红灯亮。
同时,南北红灯熄灭,南北绿灯亮。
(4)东西红灯亮维持30s。
南北绿灯亮维持25s,然后闪亮3s 后熄灭。
同时南北黄灯亮,维持2s 后熄灭,这时南北红灯亮,东西绿灯亮。
(5)以上南北、东西信号灯周而复始地交替工作状态,指挥着十字路口的交通,其时序如下所示。
二、PLC 接线三、定义符号地址四、梯形图程序三层楼电梯控制电梯的上升、下降由一台电动机控制;正转时电梯上升、反转时电梯下降。
各层设一个呼叫开关(SB1、SB2、SB3)、一个呼叫指示灯(H1、H2、H3)、一个到位行程开关(ST1、ST2、ST3)。
一、控制要求:(1)各层的呼叫开关为按钮式开关,SB1、SB2 及SB3 均为瞬间接通有效(即瞬间接通的即放开仍有效)。
(2)电梯箱体上升途中只响应上升呼叫,下降途中只响应下降呼叫,任何反方向呼叫均无效,简称为不可逆响应。
具体动作要求,如下表。
(3)各楼层间有效运行时间应小于10S,否则认为有故障、自动令电动机停转。
多种液体自动混合装置的PLC 控制如图所示为三种液体混合装置,SQ1、SQ2、SQ3 和SQ4 为液面传感器,液面淹没时接通,液体A、B、C 与混合液阀由电磁阀YV1、YV2、YV3、YV4 控制,M 为搅匀电动机,其控制要求如下:1.初始状态装置投入运行时,液体A、B、C 阀门关闭,混合液阀门打开20s 将容器放空后关闭。
2.起动操作按下启动按钮SB1,装置开始按下列给定规律运转:①液体 A 阀门打开,液体 A 流入容器。
S7-200_PLC功能指令应用及实例
指令使用说明
(1)梯形图指令符号中:CU为加计数脉冲 输入端;CD为减计数脉冲输入端;R为加计 数复位端;LD为减计数复位端;PV为预置值 (2)Cxxx 为计数器的编号,范围为:
C0~C255 (3)PV预置值最大范围:32767; PV的数据 类型:INT;PV操作数为: VW, T, C, IW,
Y1
M1
S2
S1
M3F M3R
M2
(2)I/O分配 输入
起动按钮:I0.0 停止按钮:I0.3 (常闭按钮) S1按钮:I0.1 S2按钮:I0.2
输出
M1:Q0.0 M2:Q0.1 M3F:Q0.2 M3R:Q0.3 Y1: Q0.4
4.5 比较指令
比较指令是将两个操作数按指定的条件比较,操作数可以 是整数,也可以是实数,在梯形图中用带参数和运算符的 触点表示比较指令,比较条件成立时,触点就闭合,否则 断开。
I0.1
100
C1
C2(Q0.0)
100
100
2000
2. 定时器的扩展
S7-200的定时器的最长定时时间为3276.7S,如果需要更长的 定时时间,可使用图4-59所示的电路。
3. 自动声光报警操作程序
自动声光报警操作程序用于当电动单梁起重机加载到1.1倍额定负荷并 反复运行1h后,发出声光信号并停止运行。程序如பைடு நூலகம்所示。
梯形图
4.6.3 子程序调用及子程序返回指令
在程序中使用子程序,必须执行下列三项任务:建立子程序;在子程序 局部变量表中定义参数(如果有);从适当的POU(从主程序或另一个子 程序)调用子程序。
1. 建立子程序 可采用下列一种方法建立子程序: 1)从“编辑”菜单,选择插入(Insert)/ 子程序(Subroutine) 2)从“指令树”,用鼠标右键单击“程序块”图标,并从弹出菜单选择 插入(Insert)→子程序(Subroutine) 3)从“程序编辑器”窗口,用鼠标右键单击,并从弹出菜单选择插入 (Insert)→ 子程序(Subroutine)。
plc在实际生活中的应用实例

plc在实际生活中的应用实例PLC(可编程逻辑控制器)是一种广泛应用于自动化领域的控制设备,它可以在实际生活中的许多领域发挥重要作用。
本文将以几个具体的应用实例来说明PLC在实际生活中的应用。
1. 工业生产自动化PLC在工业生产中的应用非常广泛。
例如,在汽车制造业中,PLC可以用于控制生产线上的机器人,通过编程控制机器人的动作和任务,实现汽车组装的自动化生产。
另外,PLC还可以用于控制生产线上的传送带、机器人臂等设备,实现物料的自动输送和加工。
2. 智能家居控制随着智能家居的发展,PLC在智能家居控制系统中的应用也越来越广泛。
通过PLC可以实现对家庭电器的集中控制,例如控制灯光的开关、调节空调的温度、打开窗帘等。
此外,PLC还可以与安全系统集成,实现对家庭安防设备的监控和控制。
3. 水处理系统PLC在水处理系统中的应用也非常重要。
例如,在供水系统中,PLC 可以监测水位、流量等参数,根据设定的条件自动控制水泵的启停,实现对供水系统的自动化控制。
另外,在污水处理系统中,PLC可以控制污水处理设备的运行,确保污水的处理效果。
4. 物流仓储系统在物流仓储系统中,PLC可以用于控制自动化设备,例如堆垛机、输送带等。
通过PLC的编程,可以实现对物料的自动分类、存储和取出,提高物流仓储的效率和精度。
此外,PLC还可以与仓储管理系统集成,实现对仓储库存的监控和管理。
5. 智能交通系统PLC在智能交通系统中的应用也非常重要。
例如,在红绿灯控制系统中,PLC可以监测交通流量和信号灯状态,根据设定的算法和策略,自动控制红绿灯的切换,优化交通流量和减少交通堵塞。
另外,PLC还可以用于控制高速公路收费系统、停车场管理系统等。
PLC在实际生活中有着广泛的应用。
它在工业生产、智能家居、水处理、物流仓储和智能交通等领域发挥着重要作用。
通过编程控制,PLC可以实现对设备和系统的自动化控制,提高生产效率、节省能源、提升安全性。
随着科技的不断发展,PLC在实际生活中的应用将会越来越广泛,为我们的生活带来更多的便利和舒适。
西门子PLC编程的9个经典实例!高手勿进
一、小车往返运动用S7-200实现小车往返的自动控制 ,控制过程为按下启动按钮,小车从左边往右边(右边往左边运动)当运动到右边(左边)碰到右边(左边)的行程开关后小车自动做返回运动,当碰到另一边的行程开关后又做返回运动。
如此的往返运动,直到当按下停车按钮后小车停止运动。
▲电气接线图I/O分配表梯形图程序PLC接线图程序调试及结果分析▲控制平台操作面板当按下SB2即i0.0(鼠标点击i0.0f)接通后,Q0.0接通,小车右行(即指示 灯 Q0.0 亮)。
当小车运行碰到右限位开关SQ2即i0.4(用鼠标点击i0.4f,模拟SQ2被压下)接通,此时小车左行(指示灯Q0.0灭,指示灯Q0.1亮),当运行到左边碰到左限位SQ1即i0.3(鼠标点击i0.3f)接通,此时小车又往右运行(指示灯Q0.1灭,指示灯Q0.0亮)。
如此往返运动下去直到按下SB1即i0.2(鼠标点i0.2f)接通,小车停止运行。
附:二、闪光电路当按下启动按钮后,要求在两秒钟内有一秒亮有一秒灭,如此反复,灯一闪一闪 发光。
I/O分配表梯形图程序PLC接线图程序调试及结果分析把编写好的程序下载到西门子s7-200PLC中进行调试。
观察运行结果和实验要求是否相同。
通过在线控制面板进行调试,当按下在线控制面板上的I0.0f(即 I0.0接通)此时Q0.0有输出,Q0.0所接负载灯就亮,同时启动定时器T37开始计时, 当计时一秒后因T37动作,其常闭触点断开,所以Q0.0无输出,所接负载灯灭。
灯灭的同时启动定时器 T38,T38 计时一秒后,把串联在定时器T37的常闭触点断开,所以T37复位,T37常闭触点恢复常闭。
此时Q0.0 又有输出, 所接负载灯又亮。
这样,输出Q0.0上所接的负载灯以接通一秒,断开一秒频率不停的闪烁,直到按下在线控制面板上的 I0.1f(即I0.1接通),闪光电路不在继续工作。
若想改变灯闪烁的频率只要改变定时器的时间就能够达到改变要求。
六个典型PLC程序实例详解(附图),自控项目轻松入门!
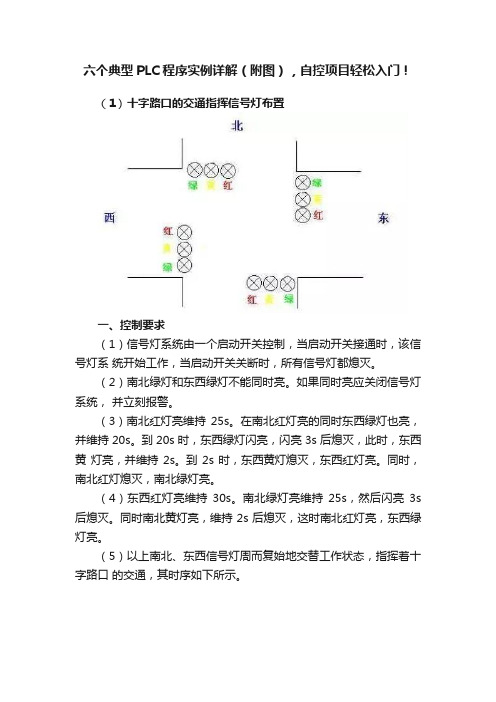
六个典型PLC程序实例详解(附图),自控项目轻松入门!(1)十字路口的交通指挥信号灯布置一、控制要求(1)信号灯系统由一个启动开关控制,当启动开关接通时,该信号灯系统开始工作,当启动开关关断时,所有信号灯都熄灭。
(2)南北绿灯和东西绿灯不能同时亮。
如果同时亮应关闭信号灯系统,并立刻报警。
(3)南北红灯亮维持25s。
在南北红灯亮的同时东西绿灯也亮,并维持 20s。
到 20s 时,东西绿灯闪亮,闪亮 3s 后熄灭,此时,东西黄灯亮,并维持 2s。
到 2s 时,东西黄灯熄灭,东西红灯亮。
同时,南北红灯熄灭,南北绿灯亮。
(4)东西红灯亮维持30s。
南北绿灯亮维持25s,然后闪亮3s 后熄灭。
同时南北黄灯亮,维持 2s 后熄灭,这时南北红灯亮,东西绿灯亮。
(5)以上南北、东西信号灯周而复始地交替工作状态,指挥着十字路口的交通,其时序如下所示。
二、PLC 接线三、定义符号地址四、梯形图程序(2)电梯控制电梯的上升、下降由一台电动机控制;正转时电梯上升、反转时电梯下降。
各层设一个呼叫开关(SB1、SB2、SB3)、一个呼叫指示灯(H1、H2、H3)、一个到位行程开关(ST1、ST2、ST3)。
一、控制要求:1、各层的呼叫开关为按钮式开关,SB1、SB2 及 SB3 均为瞬间接通有效(即瞬间接通的即放开仍有效)。
2、电梯箱体上升途中只响应上升呼叫,下降途中只响应下降呼叫,任何反方向呼叫均无效,简称为不可逆响应。
具体动作要求,如下表。
3、各楼层间有效运行时间应小于10S,否则认为有故障、自动令电动机停转。
如图所示为三种液体混合装置,SQ1、SQ2、SQ3 和 SQ4 为液面传感器,液面淹没时接通,液体 A、B、C 与混合液阀由电磁阀 YV1、YV2、YV3、 YV4 控制,M 为搅匀电动机,其控制要求如下:1.初始状态装置投入运行时,液体A、B、C 阀门关闭,混合液阀门打开20s 将容器放空后关闭。
2.起动操作按下启动按钮 SB1,装置开始按下列给定规律运转:①液体 A 阀门打开,液体 A 流入容器。
PLC编程实例

当计数器值不到5则延时2s —— 继续进行污水处理和排放 —— 若计数器达到5次 —— 则延时2s后启动污物小车 —— 再延时6s后继续进行污水处理循环 —— 如果中途按下停止按钮SB2 —— 则完成本次排污关闭罐底门后延时 2s停止污水处理过程。
解: 1)设I/O端口地址安排为:
启动按钮
停止按钮
T1 M5
RST M4 SET M5 Y0
X4 M6
RST M5 SET M6 Y3 T2 K t3/0.1 RST M6 SET M7 Y1
a)梯形图 b)语句表 图3-24续 PLC控制装卸小车
44 47 49 53
T2
M7 M7 X2 M8
RST M7 SET M8 Y4 T3 K t4/0.1
二、基本指令编程应用举例 例3-1 编制一个用户程序,控制交流电动机M1、 M2的启/停运行。其控制要求是: 1) M1启动40s后方允许M2启动; 2) M2停止运行30s后,方允许M1停止运行。 解: 1) 设I/O端口安排如下: M1:启动按钮SB1接X0 启/停控制接触器 KM1接Y0停止按钮SB2接X1 M2:启动按钮SB3接X2 启/停控制接触器 KM2接Y1停止按钮SB4接X3
RST M0 RST M1 END
指令 LD OUT K LD ANI RST SET LD AND RST SET RST LD OUT OUT K LD RST SET LD OR AND OUT LD RST RST END
数据 M8 T3 20 T3 C0 M8 M1 T3 C0 M8 M9 C0 M9 Y6 T4 60 T4 M9 M1 X7 M10 M0 M10 M10 M0 M1
58
T3
RST M8 SET M1 C0 Kn SET M9 RST M0 RST M1 RST C0
实训:PLC控制实例

PLC控制实例实例导读●五星彩灯闪烁控制程序设计。
●交通信号灯控制。
●四层电梯PLC控制系统。
●自动送料装车控制实训1 五星彩灯控制实训内容1. 五星彩灯分布图(如图1. 1所示)图1.1 五星彩灯分布图2. 控制要求:十只发光二极管L1-L10 的亮暗规律如下:1 ) 花样1先使全部彩灯复位(熄灭),然后L1 到L10 按图1.2所示的顺序每隔0.5s点亮一个彩灯,直到所有彩灯全部亮起为一个循环,重复轮回三次。
图1.2 花样1流程图2)花样2两组灯亮灭交替,循环闪烁三次。
图1.3 花样2流程图3 ) 花 样 3先 L1 灯亮,延时0.5s 后 L2 灯亮L1 灯灭,延时0.5s 后 L3 灯亮L2 灯灭,依次类推,形成单灯跑马 效果,反复循环三次。
(L10L2 L9L3 L8L4 L7L5 L6图1.4花样3流程图根据以上控制要求,将三种花样连贯起来,完成PLC VO 地址分配、硬件连线和控制程序 的设计。
根据五星彩灯的控制要求,为使程序简单,本实例不使用输入信号, 一通电,彩灯即开始 进行花样循环;使用10个输出点接 L1~L10 十个彩灯,具体 VO 地址分配如表1 所示。
表 1 / O 地址分配表输入元件I/O 地址输出元件 I/O 地址①卫 ③ 四 5 → 6 7④(四L101.主程序梯形图Network 4三个计数器清零SM0.1 C0R3Network 2SM0.0调用花样1子程序3次C0<1 +3SBR O_ENNetwork 3 调用花样2子程序3次SM0.0 C1 C0< ==1+4 +3Network 4 调用花样3子程序3欲SM0.0 C2 C11+4 +424VOC 电源L ⁶1 17 L 81 19 L 10[十>1M 1L+ 0.0 0.10.2 0.3 0. 4 2M 2L + 05 0. 6 0.7 M L+ DCS7-200 CPU224 DC/DC/DC>1M 0.00.10.203040.50.60.72M 1.01.11213141.5 L+L11 L2 L3[ L4| L5|DC24V+PLC 接线图SBR 1_ ENSBR 2 ENNetwork 5C2 ==1 +4 彩灯熄灭Q0.0R10图1.6 彩灯PLC 梯形图控制程序(主程序)2.花样1子程序梯形图图1.7 彩灯PLC 梯形图控制程序(花样1子程序) 3. 花样2子程序Network 1SM0.1让所有彩灯熄灭MOV W EN ENO MOV WENO15#0000=IN OUT □V/0 15#0000-OUT -LWONetwork Z 网络2到网络3为脉冲振荡电路SM0.0 T40 M0.1T39N TON+5{ PTNetwork 3T39 T40 M0.2M0.2T40TONNetwork 4M0.1Network 5M0.2+5{PT网络4到网络5为五星彩灯内圈外圈闪烁电路Q0.5S500.0R )5Q0.55Q0.0SEN5 Network 6Q0.0闪烁次数计数器CU C1CTU]10.4+5+Network 7 子程序运回C1==1 P K—(RET)+4图1.8彩灯PLC 梯形图控制程序(花样2子程序)4.花样3子程序Hctwork1SMM0.1Metwork2C2==1+1 Metwork 3C2+2 Hctwork4SM0.0Network 5,W¹.°Metwork 6T37M11.5(第一次循坏前)辅助继电器复位M¹0.1R )14(第二次循环前)辅助些电器复位M10.1P —(R )14(第三次循环前)辅助继电器复位M10.1P —(R)14同路4到网络9为脉冲生成电路T37 M1.0()T37TOM+2{M10.0)M¹0.1Network12M10.2Network13M10.3Network14M10.4Network15M10.5Network16M10.5Network17M10.7Network18M11.0Network 19M11.1同路11到网路20,形灯单灯跑马效果Q0.0)Q0.1)00.200.3—()Q0.4()Q0.5)Q0.600.7Q10Network 7SI/0.0Network20M11.2M0.1Q1.1)Metwork BM.1Network 9T38 MM⁰0M0.0丽+2世M2.—()循环达数计数器C2CUCTU1.5RNotwork 10MM0.0奇存器移位ENO+4{FVNetwork 23 子程序近回M11.5M1001|DATA ——(RET)M10.1 S BIT+14{图1.8 彩灯PLC 梯形图控制程序(花样3子程序)Network 21Network 22T0H]T38实训2交通信号灯控制1. 交通灯示意图(如图2. 1所示)北西实训内容2东南图2.1 交通灯示意图2.控制要求:SB1位自锁型按钮,功能为手动/自动切换,按下为自动状态,自动状态时SB2,SB3 不起作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
= Q4 .0
S6 SE2
S7
= Q4 .1
由于工件的补 充、冲孔、测试 及搬运要求同时 进行,所以应采 用并进分支与汇 合流程设计顺 序功能图。
Sto p
R Q4. 0 R Q4. 1 R Q4. 2 R Q4. 3 R Q4. 4 R Q4. 5
④在第4工位设有由单作用气缸B控制的包装箱隔离挡板, 当合格的工件到达该工位时,有气缸B抽离隔离挡板, 将合格的工件落入包装箱。
⑤工件的补充、冲孔、测试及搬运可同时进行,工件的 补充由传送带(电机M2驱动)送入。
12
Start S1
预置 C1
S2
C1
SE1
S3
T1
C1
S4 SE2
S5 SE1
= Q4 .0
在待命状态下,只要按动起 动按钮(Start),系统即开 始按顺序功能图所描述的过程 循环执行。
5
洗车控制系统设计
风干 Q4.3
清水冲洗 Q4.2 泡沫清洗 Q4.1
自动
手动
冲洗 风干 结束
起动
停止
洗车控制面板
6
1.控制说明 洗车过程包含3道工艺:泡沫清洗、清水冲洗和风干。 系统设置“自动”和“手动”两种控制方式。控制要求如下: ①若方式选择开关Mode置于“手动”方式,按起动按钮 Start,则按下面的顺序动作: 首先执行泡沫清洗→按冲洗按钮SB1,则执行清水冲洗→ 按风干按钮SB2,则执行风干→按完成按钮SB3,则结束洗 车作业。 ②若选择方式开关置于“自动”方式,按起动按钮后,则 自动执行洗车流程:泡沫清洗10s→清水冲洗20s→风干5s→ 结束→回到待洗状态。 ③任何时候按下停止按钮Stop,则立即停止洗车作业。
②在第2工位上设有气压式冲孔机,并安装有下 限位开关SB1和上限位开关SB2。当该工位有工件 时执行冲孔操作,冲孔完成时SB1动作;冲孔机返 回到位后SB2动作。
11
③在第3工位上设有测孔机和由单作用气缸A控制的废料箱 隔离挡板。测孔机上设有下限位开关SB3和上限位开关SB4, 当该工位有工件时,首先进行测孔,若测孔机在设定时间内 能测孔到底(SB3动作),则为合格品,否则即为不合格品。 不合格品在测孔完毕后,由A缸抽离隔离板,让不合格的工 件自动掉入废料箱;若为合格品,则送到第4工 位。
时间到否?
N
Y
东西向红灯亮、南北向黄灯亮 5s
N 时间到否?
Y 东西向绿灯亮、南北向红灯亮 30s
时间到否?
N
Y 东西向黄灯亮、南北向红灯亮 5s
N 时间到否?
Y
2
上图所示为双干道交通信号灯设置示意图,元件分配表如 下。
3
初始步
2.顺序功能图
S1
Sto p
分析信号灯的变化 规律,可将工作过程 分成4个依设定时间而
8
应用实例
气压式冲孔加工控制系统设计
SB2 SB4
SB1 SB3
M2
A缸 B缸
M1
SE2 SE1
9
上图为气压式冲孔加工控制系统示意图,右边为输送工件 的传送带,左边为加工转盘, 元件分配表如下。
10
控制说明
①在第1工位上设有转盘定位传感器SE1和工件检 测传感器SE2。当转盘转到工位位置时SE1动作,利 用该信号可控制转盘停止;有工件时SE2动作,利 用该信号可控制第2和第3工位上的气压式冲孔机和 测孔机是否动作,也可以控制第3和第4工位的隔离 挡板是否抽离。
S5 SB1
S6 SB2
S7 SB3
= Q4 .1 = Q4 .2 = Q4 .3
Sto p
R Q4. 1 R Q4. 2 R Q4. 3 R M0. 0
①待洗状态用S1表示。 ②洗车作业流程包括:泡沫清洗、 清水冲洗、风干3个工序,因此在 “自动”和“手动”方式下可分别 用3个状态来表示:自动方式使用 S2~S4;手动方式使用S5~S7。 ③洗车作业完成状态使用S8。
交通信号灯控制系统设计
北向 绿黄红
西向 绿
黄红
红
东向
黄 绿
红 黄绿 南向
东西向
南北向
Q4.0
红
Q4.3
Q4.1
黄
Q4.4
Q4.2
绿
Q4.5
启动 I0.0
停止 I0.1
交通信号灯控制盘1 开始1.控制说明信号灯的动作受开 关总体控制,按一下 起动按钮,信号灯系 统开始工作,工作 流程如图所示。
东西向红灯亮、南北向绿灯亮 20s
Start
S2 T1
= Q4 .0 = Q4 .5 T1 2 0 s
顺序循环执行的状态: S3
= Q4 .0
S2、S3、S4和S5,
= Q4 .4 T2
T2 5 s
另设一个初始状态S1。
S4
= Q4 .2
由于控制比较简单,
= Q4 .3
T3
可用单流程实现,如
T3 3 0 s
图所示。
S5 T4
= Q4 .1 = Q4 .3 T4 5 s
2. 顺序功能图设计
R S1 R S2 R S3 R S4 R S5 R S6
R S7 R S8 R S9 R S1 0 R S1 1 R S1 2
R S1 3 R S1 4 R S1 5 R S1 6 R S1 7
S8
SB1 S9
SB1 SB2 S10
初始步
= Q4 .0 = Q4 .5 T1 2 0 s
= Q4 .0 = Q4 .4 T2 5 s
= Q4 .2 = Q4 .3 T3 3 0 s
= Q4 .1 = Q4 .3 T4 5 s
Sto p
R S2
R S3
R S4
R S5
= S1
编写程序时,可将顺序功能 图放置在一个功能块(FB) 中,而将停止作用的部分程序 放置在另一个功能(FC)或 功能块(FB)中。这样在系 统启动运行期间,只要停止按 钮(Stop)被按动,立即将所 有状态S2~S5复位,并返 回到待命状态S1。
7
2. 顺序功能图设计
由于“手动”和“自动”工作方式只能选择其一,因此使 用选择性分支来实现,如图所示。
Start M0 .0
S1
S M0.0
Mo d e
S2 T1
S3 T2
S4 T3
= Q4 .1 T1 1 0s
= Q4 .2 T2 2 0 s
= Q4 .3 T3 5 s
S8
R M0. 0
Mo d e
R S2 R S3 R S4 R S5 = S1
4
2.顺序功能图
分析信号灯的变 化规律,可将工作过 程分成4个依设定时 间而顺序循环执行的 状态:S2、S3、S4 和S5,另设一个初 始状态S1。由于控 制比较简单,可用单 流程实现,如图 所示。
S1 Start
S2 T1
S3 T2
S4 T3
S5 T4