铰杆
虎克铰工作原理

虎克铰工作原理虎克铰是一种常用的连接件,被广泛应用于机械工程、建筑工程和航空航天等领域。
它的工作原理基于力学原理和材料力学的知识,通过合理的设计和制造工艺,实现了强大的连接和传递力。
虎克铰的工作原理可以简单描述为:通过虎克铰的结构设计和材料选择,使得其能够承受并传递大量的力,同时保持良好的稳定性和可靠性。
虎克铰的结构设计非常重要。
它由两个相互连接的零件组成,分别是铰杆和铰座。
铰杆是一种长条状的构件,常见的形状有圆形和矩形。
铰座则是一个封闭的结构,通常由金属材料制成。
铰杆和铰座之间通过铰钉连接,形成一个活动连接点。
当外部力作用于虎克铰时,铰杆和铰座之间会产生相互作用力。
这些力可以分为两类:剪切力和弯矩力。
剪切力是指铰杆和铰座之间的相互切割力,而弯矩力则是指铰杆和铰座之间的相互弯曲力。
虎克铰能够承受和传递大量的力的关键在于其材料选择。
常见的虎克铰材料有钢、铝和铜等。
这些材料具有高强度和良好的耐磨性,能够在各种工况下保持稳定的性能。
此外,虎克铰的制造工艺也对其工作性能起着重要的影响。
精细的加工和合理的热处理能够提高虎克铰的强度和耐久性。
虎克铰的工作原理是基于力学原理的。
根据牛顿第三定律,当外部力作用于虎克铰时,铰杆和铰座会产生相互作用力。
这些作用力可以通过受力分析和力矩平衡来计算和分析。
通过合理的设计和计算,可以确定虎克铰的尺寸和材料,以满足特定的工程要求。
虎克铰的工作原理也符合材料力学的知识。
根据弹性力学的原理,虎克铰在受到外部力作用时,会发生弹性变形。
当外部力作用消失时,虎克铰会恢复到原来的形状。
这种弹性变形和恢复的特性使得虎克铰具有良好的耐久性和可靠性。
虎克铰是一种通过合理的设计和制造工艺,实现了强大的连接和传递力的连接件。
它的工作原理基于力学原理和材料力学的知识,通过合理的设计和制造工艺,使得其能够承受并传递大量的力,同时保持良好的稳定性和可靠性。
虎克铰的工作原理符合牛顿第三定律和弹性力学的原理,通过受力分析和力矩平衡来计算和分析。
三铰支架强度计算

三铰支架强度计算三铰支架(双铰链)设计要求是根据三铰杆在两个轴上的位置,可以改变其旋转方向。
在建筑设计中,为了使其各轴能够相互相对地协调转动,因此设计中通常将转角矩较大的转角结构,称为三铰杆或三铰铰臂结构。
双铰支架的主要特征就是转角变化。
三铰链结构的主要特征就是转角的变化,转角越大,三铰链结构的抗弯强度就越大,结构抗剪强度也就越大,这也就是常说的“刚度大”或“抗剪能力强”;而如果两个轴间没有转角,则三铰链结构是没有抗弯强度的。
如果三铰支架不转角,那么三铰链结构可以满足三种强度要求:承受轴力(拉力)、承载扭矩(剪力)与纵向剪力(拉力)。
其中承载扭矩的剪力是指通过铰链来传递的压力;而纵向剪力是通过三铰链来传递到铰链轴上的压力。
转角结构对三铰链结构有很大影响,转角越大强度越低。
但由于转角量小,因此仅能有限地减小转动扭矩,所以用扭断螺栓连接起来的结构较少,一般为简单型。
在单支承结构中转角为45°时:单铰支架设计极限压力应不小于20 MPa。
1、计算过程在上述公式中,支座受力分析为:支座侧力为,在支座轴线处施加静载荷的静力作用下,支座所受拉力为。
根据《建筑抗震设计规范》(GB50010-2006)要求,该类型构造宜采用矩形截面,所受拉、压、剪、弯三种力矩作用于中心线,因此矩形截面所受拉力为有限元分析参数。
对矩形截面三铰安装节点进行有限元分析。
根据结构截面尺寸和轴向变形大小进行相应计算系数。
根据结构力学理论,当转角值越大,三铰结构转角的强度和刚度就越大。
但是对同一建筑结构不同受力情况下,当转角值不到某一极限值时,结构强度并不会随转角增大,而是随着轴向变形增大而减小;当转角达到某一极限值时,结构强度就会增加,但此时受力情况已经非常严重。
所以采用有限元分析方法进行分析计算,是很好的选择方法。
2、三铰链的结构特点与应用三铰链的主要特点是:承载扭矩大,抗剪能力强,旋转方向灵活。
当一个支架用于大跨度构件时,它可以承受纵向剪力,能承受弯曲应力,同时还能承受水平力。
水泥厂热风管道设计及计算
目录一、热风管道一般计算 (4)1.热风管道管径计算 (4)(1)一般地区 (4)(2)高海拔地区 (4)2.管道不同状况下的风速 (4)3.热风管道标准管径及法兰尺寸 (5)4.管道管径与壁厚关系 (6)5.管道阻力计算 (6)(1)阻力计算公式 (6)(2)摩擦阻力系数λ计算 (7)(3)局部阻力系数“ξ”值 (9)(4)阻力平衡计算 (9)二、管道重量计算 (11)1、圆形风管自重 (11)2、保温材料重量 (11)3、风管内积灰重量 (12)4、事故荷载系数 (12)三、膨胀节选型计算 (13)1、膨胀节的作用 (13)(1)金属膨胀节构造及用途 (13)(2)非金属膨胀节构造及用途 (13)(3)膨胀节技术参数 (14)2、膨胀节选型计算 (15)(1)膨胀量计算 (15)(2)膨胀节自振频率计算 (16)(3)膨胀节推力计算 (17)(4)膨胀节预拉伸计算 (18)3、膨胀节的安装位置及注意事项 (18)(1)安装位置 (18)(2)安装注意事项 (18)四、管道支座及支架 (19)1、支座形式 (19)(1)固定支座 (19)(2)滑动支座 (19)(3)导向支座 (19)2、支座设置位置 (19)3、管道支架形式 (20)(1)普通钢支架 (20)(2)铰杆支架 (21)(3)支架的位置 (21)4、管道支座受力计算 (22)(1)计算步骤 (22)(2)同一平面内单一风管支座计算 (22)(3)空间分叉风管支座计算 (25)(4)支座间允许最大跨度计算 (29)五、管道及收尘设备保温计算 (32)1、热风管道保温层厚度 (32)2、收尘设备保温层厚度 (33)3、设备保温经济厚度 (34)4、常用保温材料性能表 (36)六、热风管道工艺布置要求 (37)七、附录表:附录(一)常用设备风量,含尘浓度积气体温度 (39)附录(二)除尘管道计算表 (40)附录(三)常用管件局部阻力系数表 (41)附录(四)膨胀节选型表 (55)附录(五)管道支座选型表 (68)一、热风管道一般计算1.热风管道管径计算对于海拔高度<500m 的一般地区及高海拔地区其计算公式如下: (1) 一般地区 (2) 高海拔地区D-----管径,m ;Q t ------般地区工况风量,m 3/h ; Q Lg ----高海拔地区工况风量,m 3/h ;υ------管道风速,m/s 。
杠杆-铰杆二级增力手动液压泵
执 行 元件
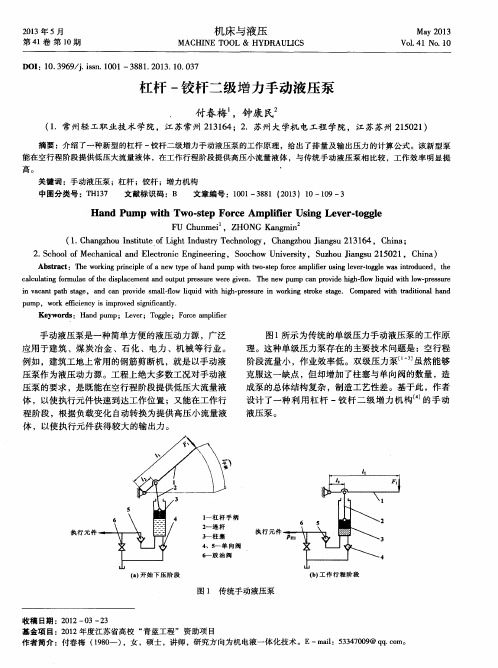
( a ) 开始 下 压阶 段
( b ) 工作 行程 阶 段
图 1 传统手动液压泵
收 稿 日期 :2 0 1 2— 0 3— 2 3 基金项 目:2 0 1 2年度江苏省高校 “ 青蓝工程 ”资助项 目 作者简介 :付春梅 ( 1 9 8 0 一) ,女 ,硕士 ,讲师 ,研究方 向为机电液一体化技术 。E—m a i l :5 3 3 4 7 0 0 9 @q q . c o m。
c a l c u l a t i n g f o r mu l a e o f t h e d i s p l a c e me n t a n d o u t p u t p r e s s u r e w e r e g i v e n .T he n e w p u mp C n a p r o v i d e h i g h - l f o w l i q u i d t l l l o w— p r e s s u r e i n v a c a n t p a t h s t a g e ,a n d C n a p r o v i d e s ma ll — l f o w l i q u i d w i t h h i g h — p r e s s u r e i n w o r k i n g s t r o k e s t a g e .C o mp a r e d wi t h t r a d i t i o n l a h nd a p u mp, w o r k e ic f i e n c y i s i mp r o v e d s i g n i i f c nt a l y . Ke y wo r d s :Ha n d p u mp; L e v e r ;T o g g l e ;F o r c e a mp l i i f e r
解决铰杆-杠杆增力液压夹具自由度不足的新方法——滚动高副取代低副法
Ke wo d :F x u e y rs it r ;Hy r u i rv ; F re a l i r T g l ; L v r R d ls i o y id r d a l d ie c o c — mp i e ; o g e f e e ; o — sps nc l e e t n
20 0 8年 1 0月 第3 6卷 第 1 0期
机床 与液压
M ACHI NE TO0L & HYDRAUL C IS
Oc. 0 8 t2 0
V0. 6 No 1 13 . 0
解决铰杆 一杠杆增力液压夹具 自由度不足 的新方法 滚动高副取代低副法
— —
孙承峰 ,钟康 民
如下 。
1 现 有技 术方 案简 介
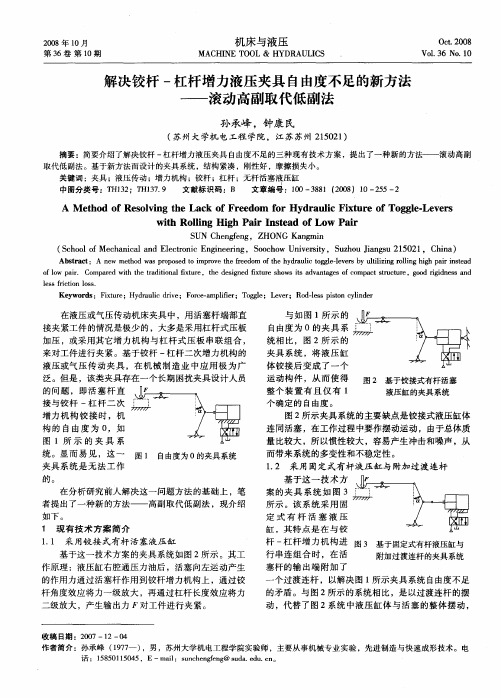
1 1 采 用铰接 式 有杆 活塞 液压缸 . 基于这一技术方案的夹具系统如图 2所示 。其 工
作原理 :液压缸右腔通压力油后 ,活塞向左运动产生 的作用力通过活塞杆 作用 到铰杆增 力机构 上 ,通过铰 杆角度效应将 力一级 放大 ,再通过 杠杆 长度效应 将力 二级放大 ,产 生输 出力 F对 工件进 行夹紧。
杆 一 杆增 力机 构进 图 3 基 于 固定 式有 杆 液 压缸 与 杠
行 串连组合 时 ,在 活 塞杆 的输 出端附 加 了
一
附加过渡 连杆 的夹具 系统
个过渡连杆 ,以解决 图 1 所示夹具 系统 自由度不足 的矛盾 。与 图 2所示 的系统相 比,是 以过渡连杆 的摆
中图分类号: H3; H3. T 1 T 1 9 文献 2 7 标识码: 文章编粤: 0 —81(0 )1 — 5 — B 1 38 20 0 25 2 0 8
气动肌腱驱动的基于曲杠杆-铰杆的增力压紧装置

增 力 机 构 的 组 合 装 置 , 该 装 置 结 构 较 复 杂 ,对 称 性 不 好 。 基 于 上 述 原 因 ,我 们 创 新 设 计 了 2种 新 型 的 以 气
动 肌 腱 为 驱 动 力 、 基 于 曲 杠 杆 一铰 杆 的 压 紧 装 置 ,较 好 地解决 了上述 问题 。
大 直 径 气 动 肌 腱 在 压 缩 空 气 撤 除 后 恢 复 到 松 弛 状 态 , 输 出 件 上 的 作 用 力 也 就 消 失 了 。与此 同 时 , 力 小 直 径 气 动 肌 腱 内 部 充 入 压 缩 空 气 ,产 生 另 一 个 收 缩 力 F, 其 作 用 下 , 输 出 件 又 回 复 到 初 始 位 置 。 在 力
气动肌 腱 驱 动 的基 于 曲杠 杆 一 杆 的增 力压 紧装 置 铰
口 秦 培亮 口 钟康民 1
江 苏苏 州 2 5 2 10 1 1 苏 州 大 学 机 电学 院 .
2 .苏 州农 业职 业 技 术 学 院 江苏 苏 州 2 5 0 10 8 摘 要 : 绍 了两种 新 型 的 以 气动 肌腱 为驱 动 力, 于 曲杠 杆 一 杆 的 压 紧装 置 的 工 作原 理 , 出了 力 学计 算 公 式 。 介 基 铰 给
杠 杆 被 动 臂 的 长 度 , l/ I/ //
2 对 称 布 局 压 紧装 置 的工 作 原 理
对 称 布 局 气 动 肌 腱 驱 动 的 曲 杠 杆 一铰 杆 增 力 压 紧 装 置 的 工 作 原 理 如 图 2 所 示 ,它 与 图 1所 示 装 置 的
工 作 原 理 是 基 本 相 同 的 ,其 区 别 在 于 该 装 置 利 用 气 动
中 图分 类 号 : H1 1 1 :T 6 . T 6 . 3 H1 2 1 文献标识码 : A
脱模机构的设计与加工教案
【课题编号】5—工程五【课题名称】脱模机构的设计与加工【教学目标与要求】一、学问目标1.了解脱模机构的作用,及脱模机构的设计原则。
2.了解顶出机构、推板脱模机构的构造和设计原则。
3.了解保鲜盒盒体模具脱模的动作原理。
4.了解推杆固定板推杆孔和推板与推杆固定板固定螺纹孔的加工工艺。
5.了解拉杆导柱、拉杆、圆形拉模扣、复位杆、拉料杆的作用及构造。
6.了解脱模机构——侧向抽芯机构及复位机构的作用、构造和设计。
7.生疏攻制内螺纹的钻孔和攻制工艺。
二、力量目标1.能够分析保鲜盒盒体模具脱模的动作原理。
2.能够分清拉杆导柱、拉杆、复位杆、拉料杆和拉模的区分。
3.能依据图样要求攻制内螺纹。
三、素养目标1.了解脱模机构在模具生产中的作用,能够依据设计选用原则分析保鲜盒脱模方式的动作过程。
2.了解各种不同杆在脱模机构中的作用,侧向抽芯机构与各种复位机构的作用和构造特点。
3.生疏螺纹孔的钻孔和攻螺纹的过程。
四、教学要求1.了解推杆固定板推杆孔与推板和推杆固定板固定螺纹孔的加工工艺。
2.了解脱模机构的作用、构造及设计原则。
3.能够分析保鲜盒盒体模具脱模方式的动作过程及其优点。
4.了解圆形拉模和安装孔的加工工艺。
5.了解各种杆件在脱模中的作用和构造。
6.了解侧向抽芯机构和复位机构的组成、动作原理及设计方法。
7.把握攻内螺纹的工艺过程。
【教学重点】1.保鲜盒盒体模具脱模过程分析。
2.推杆固定板推杆孔、推板和推杆固定板固定螺纹孔、圆形拉模扣安装孔的加工工艺。
【难点分析】1.脱模机构中的各种机构、构件的设计。
2.侧向抽芯机构和复位机构的作用与设计。
3.攻内螺纹前底孔直径确实定。
【分析学生】要了解脱模机构的构造与设计要求,首先要生疏塑料制作的生产过程,了解脱模机构的作用及动作过程,才能理解脱模机构的构造,设计出合理有用的脱模机构。
侧向抽芯机构的构造比较特别,假设对模具的制作和制件的生产过程不生疏,是比较不简洁理解的。
学生需要具备肯定的根底学问和实践学问后,才能比较简洁理解侧向机构的构造特点。
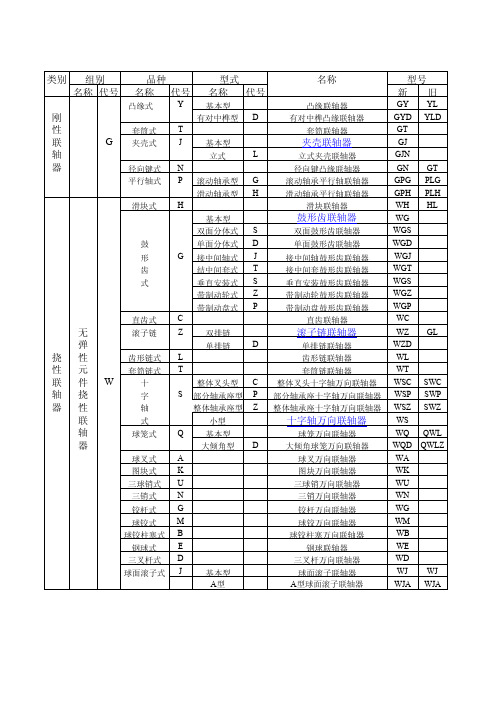
联轴器的分类及标准表
器
大倾角型 D
大倾角球笼万向联轴器
球叉式 A
球叉万向联轴器
图块式 K
图块万向联轴器
三球销式 U
三球销万向联轴器
三销式 N
三销万向联轴器
铰杆式 G
铰杆万向联轴器
球铰式 M
球铰万向联轴器
球铰柱塞式 B
球铰柱塞万向联轴器
钢球式 E
钢球联轴器
三叉杆式 D
三叉杆万向联轴器
球面滚子式 J
基本型
球面滚子联轴器
A型
类别 组别
品种
型式
名称 代号 名称 代号 名称 代号
名称
凸缘式 Y
基本型
凸缘联轴器
刚
有对中榫型 D
有对中榫凸缘联轴器
性
套筒式 T
套筒联轴器
联
G 夹壳式
J
基本型
夹壳联轴器
轴
立式
L
立式夹壳联轴轴式 P 滚动轴承型 G
滚动轴承平行轴联轴器
滑动轴承型 H
滑动轴承平行轴联轴器
永磁式
蛇形弹簧式
名称
蛇形弹簧联轴器
双法兰蛇形弹簧联轴器 单法兰蛇形弹簧联轴器 接中间轴蛇形弹簧联轴器 高速蛇形弹簧联轴器 带制动轮蛇形弹簧联轴器 带制动盘蛇形弹簧联轴器 安全型蛇形弹簧联轴器
气动肌腱驱动的基于杆件-铰杆的对称夹具系统设计

气动肌腱 与一般杠杆 一铰杆增 力机构进行 串联组 合 ,能得到许多 形 式 的气 动 一机 械 复合 传动 夹 紧装
场合 ,有较好 的应用 。文献 [ ]提 出基于气动 肌腱 2
与机械增力机构的夹具系统 ,作者在此基础上 ,根据 科学美学的对称性理念 ,创 新设计 了 4种 以气动
置。作 者创新设计 了 2种气 动 一机械复 合传动 装置 , 结合图对它们 进行分析与 比较 ,并分别给 出其相应 的 力学计 算公式。
安排 。上述两种情况还 可以将直杠杆设计成 曲杠杆以 满足被夹持工件不 同位置的要求。
图 3 气 动 肌腱 驱 动 的基 于恒 增 力 杠 杆 一铰 杆 的 内 夹 持 夹 紧装 置
图 2 气动肌腱 驱动的基 于一般杠 杆 一铰杆 的浮动夹 紧装 置
3 力 学计 算 夹紧装置 的增力系数是 输 出力与输 入力 的 比值 ,
.
O
(e )p s _. n u 。 ‰ ) ( eer …m nrv s
’。。— —
o
— — ntp t n u
n t ut np
De i n o y m e r c Fi t e Sy t m s d o v r t g l i e y Pn um a i us l sg fS m t i x ur se Ba e n Le e -o g e Dr v n b e tc M ce
Q N P ia g . H N a g n I e i Z O G K n mi ln
致 ,很难保证其对 中和均匀夹紧的要求 的情况 ,因此 作者设计 了浮动夹 紧装置 。气动肌腱驱 动的基 于一般 杠杆 一 铰杆 的浮动夹紧装置如图 2所示 ,其工作原理 与图 1 基本相 同,在此不再赘述 。该夹紧装置解决 了 浮动夹 紧的问题 ,该机构在大批量生产中有着一定 的
增力机构
本文所设计的多种新型夹具具有增力比大、结构紧凑、摩擦损失小等优点, 性能稳定可靠、适应范围广,实际用应中可明显提高生产效率,有一定的推广应 用价值。
第l章概述
图1-3偏心夹紧机构
圆偏心轮的增力系数按下式进行计算:
ip 2雨雨蠹瓜司
‘1q
式中 三——力臂的长度;
p——回转中心至接触点的距离;
口——接触点的曲线升角;
仍——工件与圆偏心轮之间的摩擦角;
仍——圆偏心轮与转轴之间的摩擦角。
(4)端面凸轮增力机构
端面凸轮增力机构其实是斜楔增力机构的变型(见图14),在此不再讨论。
对于内孔直径较大的工件设计出两种基于正交增力机构的离心式内孔夹具结构中采用了互相垂直的输出重块与增力重块通过斜楔增力机构或铰杆增力机构进行力的传递使得该夹具相对于同样结构重量但没有增力机构的离心式内孔夹具实际输出转矩的能力大的多
山东大学 硕士学位论文 增力机构在机床夹具设计中的应用研究 姓名:宋强 申请学位级别:硕士 专业:机械制造及自动化 指导教师:张进生
f破lt山.e and c阳ated c(mlbiIl甜ion witll le鹞丘icti∞loss ad_v越也lge were ill鹏缸a_ted
hovated丘xtl|l镐in this p印er ll习峪compacnl嚣s featIlre of great白rce i州勰船ing 谢o、le韬丘icd∞loss锄d∞∞.TIlis bnd of h嬲stable aIId reliable capability with
机器人常见末端夹持机构大全

机器人常见末端夹持机构大全对于工业机器人来说,搬运物料是其抓取作业方式中较为重要的应用之一。
工业机器人作为一种具有较强通用性的作业设备,其作业任务能否顺利完成直接取决于夹持机构,因此机器人末端的夹持机构要结合实际的作业任务以及工作环境的要求来设计,这导致了夹持机构结构形式的多样化。
图1 末端执行器要素、特征、参数的联系大多数机械式夹持机构为双指头爪式,根据手指运动方式的可分为:回转型、平移型;夹持方式的不同又可分成内撑式与外夹式;根据结构特性可分为气动式、电动式、液压式及其组合夹持机构。
一、气压式末端夹持机构气压传动的气源获取较为方便,动作速度快,工作介质无污染,同时流动性优于液压系统,压力损失较小,适用于远距离控制。
以下为几种气动式机械手装置:1. 回转型连杆杠杆式夹持机构该种装置的手指(如V型手指、弧形手指)通过螺栓固定在夹持机构上,更换较为方便,因此能够显著扩大夹持机构的应用场合。
图 2 回转型连杆杠杆式夹持机构结构2.直杆式双气缸平移夹持机构这种夹持机构的指端通常安装于配备有指端安装座的直杆上,当压力气体进入单作用式双气缸的两个有杆腔时,会推动活塞逐渐向中间移动,直至将工件夹紧。
图3 直杆式双气缸平移夹持机构结构图3.连杆交叉式双气缸平移夹持机构一般由单作用双联气缸与交叉式指部构成。
气体进入气缸的中间腔后,会推动两个活塞往两边运动,从而带动连杆运动,交叉式指端便会将工件牢牢固定;如果没有空气进入中间腔体,活塞会在弹簧推力的作用下复位,固定的工件会被松开。
图4 交叉式双气缸平移夹持机构结构图4.内撑式连杆杠杆式夹持机构通过四连杆机构实现力的传递,其撑紧方向和外夹式相反,主要用于抓取带有内孔的薄壁工件。
夹持机构撑紧工件后,为了确保其能够顺利的用内孔定位,通常安装3 个手指。
图 5 内撑式连杆杠杆式夹持机构结构图5.固定式无杆活塞缸驱动的增力机构固定式无杆活塞缸的气动系统如下所示,该缸为单作用气缸,反向靠弹簧力作用,由两位三通电磁阀实现换向。
《钳工实训》项目1任务5 螺纹加工

项目1 钳工实训
1
任务5 螺纹加工
1、学习目标
通过本任务的学习,掌握钻攻螺纹、套螺纹 的相关知识,能够合理利用工具完成螺纹的加工, 进行螺纹加工质量分析。
2
任务5 螺纹加工
任务引入
按要求完成工件上全部孔的加工 ,并达到图样要求。
3
任务5 螺纹加工
知识准备
一、攻螺纹 攻螺纹是用丝锥在工件孔中切削出内螺纹的加工方法,攻螺纹
φ12 mm×200 mm。 2、 工具、刃具、量具准备 划针、划规、样冲、平锉刀、钻头、丝锥、圆板牙、铰杠
、钢直尺、游标卡尺、游标高度卡尺,直角尺、毛刷、机油若干。
18
任务5 螺纹加工
二、 实施步骤 1、攻螺纹 Step1 按图示尺寸要求划出各螺纹的加工位置线,钻各螺纹底孔, 并对孔口进行倒角。 Step2 依次攻制4×M6、M8、 M10、 2×M12(件1)以及 2×M20(件2)的螺纹,并用相应的螺纹进行配检。
二、套螺纹 用板牙在外圆柱面(或外圆锥面)上切削出外螺纹的加工方法
,称为套螺纹。 1、套螺纹的工具 (1)圆板牙——圆板牙是加工外螺纹的工具,有封闭式和开槽
式两种结构。圆板牙一般用于切削螺纹直径小于16 mm、螺距小于 2 mm 的三角形外螺纹。
(2)板牙架——板牙架是用于夹持圆板牙的工具。
圆板牙
板牙架
板。操作时还要经常倒转断屑。
起套方法
套螺纹的方法
16
任务5 螺纹加工
3、套螺纹时出现的问题及其产生原因
套螺纹时出现的问题及其产生原因
17
任务5 螺纹加工
任务实施
1、材料准备 材料:HT200,规格:82 mm×60 mm×25 mm。 材料:45 钢,规格:38 mm×16 mm 的六角体。 材料:45 钢,规格:φ8 mm×100 mm,φ10 mm×150mm,
联轴器的分类及标准表

类别
组别 名称 代号
品种 名称 代号
轮胎式 弹性套 柱销式 弹性 柱销式 弹性柱销 齿式 H Z T U
型式 名称 代号
带骨架型 整体型 开口型 基本型 带制动轮型 基本型 带制动轮型 基本型 圆锥轴孔型 接中间轴型 带制动轮型 基本型 单法兰型 D S D J Z Z Z N K
名称
轮胎式联轴器 整体轮胎式联轴器〕 开口轮胎式联轴器 弹性套柱销联轴器 带制动轮弹性套柱销联轴器 弹性柱销联轴器 带制动轮弹性柱销联轴器 弹性柱销齿式联轴器 圆锥轴孔弹性柱销齿式联轴器 接中间轴弹性柱销齿式联轴器 带制动轮弹性柱销齿式联轴器 梅花型弹性联轴器 单法兰梅花型弹性联轴器 双法兰梅花型弹性联轴器
型号
旧
JSS JSD JSJ JSG JSZ JSP JSA JH JT JTG JN JL JB JG JQ JF ZM ZC ZS ZT ZH ZW AQ AQZ AQP AS ASV AYC AYG AYS AM AM AML AF AA AC AMS AJS AM AML BL TL ML S H
刚 性 联 轴 器
G
套筒式 夹壳式 径向键式 平行轴式 滑块式
基本型 立式 滚动轴承型 滑动轴承型 基本型 双面分体式 S D J T S Z P L G H
立式夹壳联轴器 径向键凸缘联轴器 滚动轴承平行轴联轴器 滑动轴承平行轴联轴器 滑块联轴器 鼓形齿联轴器 双面鼓形齿联轴器 单面鼓形齿联轴器 接中间轴鼓形齿联轴器 接中间套鼓形齿联轴器 垂直安装鼓形齿联轴器 带制动轮鼓形齿联轴器 带制动盘鼓形齿联轴器 直齿联轴器 滚子链联轴器 单排链联轴器 齿形链联轴器 套筒链联轴器 整体叉头十字轴万向联轴器 部分轴承座十字轴万向联轴器 整体轴承座十字轴万向联轴器 十字轴万向联轴器 球笼万向联轴器
杠杆-铰杆二级增力手动液压千斤顶

1 、
。
传 动技 术相 结合 u 的杠 杆一 铰杆 二级 增力 手 动 液压 4
,i1 田1 卵 Z 叩2 /’ 一、
千斤 顶 , 获得 传统 手 动 液压 千 斤 顶 2倍 以上 的举 升 可
F
历
式 中 : — — 人 手作 用 于杠 杆上 的输 入力
D— — 大活 塞 的直径 ( 图 1 图 2所 示 ) 如 、 d— — 小 活 塞 的直径 ( 图 1 图 2所 示 ) 如 、
密 封容 积增大 形成 局部 真空 时 , 向 阀 7打 开 , 箱 中 单 油 的油在 大气压 力 的作 用 下通 过 吸油 管 进 入 活塞 左 腔 , 完 成一 次吸油 动 作 。 当用 力 压下 手 柄 时 , 接 在其 上 铰
7
的连杆 压下 铰杆 34 进 而推 动小 活 塞 5向左 移 动 , 、, 其
l2 O
液压 与 气动
21 0 2年 第 l O期
杠 杆 一 铰 杆 二 级 增 力 手 动 液 压 千 斤 顶
付春梅 ,钟康 民 Ma u lHy ru i a k wi wo- e o c n a d a lcJ c t T -tp F re Amp i e ig L v rtg l h s l rUsn e e ・o ge i f -
3 计算举 例
阀旋 转 角度 是 可 以改 变 的 ) 活 塞 1 , 1可 以在 自重 和 外 力 的作 用下 实 现 回程 。 铰 杆机 构 的 压 力 角 较 小 时 , 一 个 力 放 大 机 是 构 ; 较大 时 , 一 个 行 程 放 大 机 构 。利 用 这 一 特 点 , 是
式 。该 新型 千斤 顶 空载 时速 度 大 , 负载时输 出力大 , 传统 手动 液压 千斤顶相 比较 , 与 工作 效 率 明显 提 高。 关键 词 : 手动 液压 千斤 顶 ; 杠杆 ; 杆 ; 力机 构 铰 增 中 图分类 号 : H17 文献标 志码 : 文章 编 号 :0 0 5 ( 0 2 1 _1 2( T 3 B 10 48 8 2 1 )0( 0 -3 ) )
AutoCAD千斤顶课程设计

计算机辅助设计课程设计报告目录一、课程设计任务书 (3)二、任务书附件1:千斤顶的图样 (4)三、任务书附件2:课程设计报告式样 (8)四、设计过程 (9)五、设计总结 (26)六、参考资料 (27)七、附件一:二维工程图八、附件二(仅电子稿):二维工程图&三维建模(dwg文件)课程名称:计算机辅助设计设计题目:千斤顶的二维工程图和三维建模专业班级:工程力学2学生姓名:王顺金学号:20107090指导老师:张华起止日期 2012 年12月 31 日至2013年 01 月 18 日一、课程设计任务书重庆大学本科学生课程设计任务书说明:1、学院、专业、年级均填全称,如:光电工程学院、测控技术、2003。
2、本表除签名外均可采用计算机打印。
本表不够,可另附页,但应在页脚添加页码二、任务书附件1:千斤顶的图样三、任务书附件2:课程设计报告式样提交的课程设计报告要求包括以下内容:1、封面在学院教务领取2、设计任务3、设计过程4、总结5、参考资料6、二维工程图(打印在A4纸上)(注意:提交课程设计报告的打印稿,以及千斤顶的二维工程图和三维建模的dwg文件和课程设计报告电子稿)四、设计过程千斤顶的二维工程图1.0绘制二维图的基准图1.0.1、看懂各零件图样,了解钳座的结构特点。
打开“AutoCAD”,选择“格式”|“图层”命令,弹出“图层特性管理器”窗口,新建“中心线”、“粗实线”、“细实线”、“文字”、“虚线”五个图层。
设置如下图:1.0.2、选择“格式”|“线宽”命令,将“显示线宽”勾选;选择“标注”|“标注样式”,弹出“标注样式管理器”窗口,单击“修改”;1.0.3、保存当前绘图,命名为“千斤顶基准图”,并关闭。
1.1千斤顶底座的二维工程图1.1.1、打开“千斤顶基准图”选择“粗实线”图层,绘制“200x287”的边框,按照1:1的比例绘制底座零件图并标注,按照要求写好文字说明,具体可以用“offset”命令进行编辑表格绘制,然后用“mtext”插入文字,调整大小格式等;1.1.2、根据任务书附件1的样图(底座零件图)的已知参数,选择“粗实线”图层,按照1:1的比例绘制底座零件图,利用“line”、“circle”、“offset”、“trim”等命令绘制底座工程图;1.1.3、标注,利用“dimlinear”、“半径dimradius”、“”等进行标注,其中直径用“%%C150”进行标注,有效的利用标注样式管理器;1.1.4、底座零件图如下图所示:1.1.4将窗口另存为“底座”并关闭。
一种采用铰杆连接的气-液增压装置

图 4双级气一 液增压 装置 工作流程 图
液 体 。在低 压 液体 的作 用下 , 行 元 件 将快 速 趋 近 执 工 作 部位 。一旦 执行 元件 遇到 负 载 , 统压 力升 高 , 系
a
d
图 3双气一 液增压装置工作原理图
此时单向阀 f 便会 自动关 闭, , h 而顺序 阀 i 会 自动 、 j 打 开 ,液 压缸 大 腔低 压 液 体 经 相 应 顺 序 阀 流 回油 箱, 实现卸荷 。 液压缸小腔经单 向阀 eg 出高压小 、排 流 量液 体 进入 执 行装 置 , 执 行 元件 获得 所 需 的输 使 出力 。 当铰杆 过 临 界点 后 , 压 缸 活 塞将 向 内侧 运 液 动 , 向 阀 ab Cd吸 入 液体 , 单 、、、 完成 一 次工 作 循 环 。 当气 动换 向 阀换 向 , 缸 活 塞 回返 时 , 压 缸 开 始 气 液 下 一 次 工作 循 环 , 气缸 活 塞 每一 次 往 返 将 产生 液 压 缸 两 次工作 循 环 。 需 要 指 出的是 , 气 缸 活塞 向液 压 缸 活塞 能 量 在 传递 的过程 中 , 为 传递 中介 的 铰杆 运 用 了 角度 效 作 应, 进行力的放大和传递 , 效果十分显著。而气缸活 塞 的往 复 运 动 , 可 以 通 过 行 程 控 制 等 方 式 , 则 使气 动换 向阀 自动换 向 ,从而实现 系统工作 的 自动循 环 。因此 , 于无杆 活塞 气缸 的气 一 基 液增 压装 置实 质 上是一种气压驱 动 、 脉动方式持续供液的柱塞液压
S p ,0 e . 06 2
一
种采用铰杆连接的气一 液增压装置
柏 青 钟 康 民
(苏州大学机电工程学院 江苏苏州 2 5 2 10 1)
铰杠心得体会

铰杠心得体会1. 铰链的概念铰链(hinge)是家具、门窗等物件上的一个部件,常用于连接并使物体能够转动或者旋转。
它是一种采用轴承和卡箍连接方法来连接门窗、板材等物体的机械配件。
铰链广泛应用于家具、门窗、机械设备等领域,可分为不同类型和结构。
2. 铰链的分类铰链根据不同的分类标准,可以分为多种类型。
(1)按材质分类:有钢铰链、不锈钢铰链、铝合金铰链、尼龙铰链等;(2)按位置分类:有平移铰链、平面铰链、角铰链、玻璃门铰链等;(3)按形状分类:有单螺旋铰链、双螺旋铰链、三螺旋铰链等;(4)按用途分类:有家具铰链、门窗铰链、机械设备铰链等。
二、铰链的优缺点铰链具有以下优点:(1)安装简单方便,可使门窗等物体开合自如;(2)结构简单、使用方便,维护也比较容易;(3)在装饰效果方面,铰链属于较为美观的一种连接方式。
但是,铰链的缺点也比较明显:(1)耐用性较差,长时间使用容易生锈或损坏;(2)使用寿命较短,需要经常更换;(3)在开合时容易产生噪音或者颤动。
三、铰链的应用1. 家具在家具制作过程中,铰链是一种常见的连接方式。
比如柜门上的开合,床的折叠,折叠桌椅的设计等,都需要使用铰链作为连接方式。
2. 门窗门窗是人们日常生活中常见的物体,使用铰链连接可以让门窗的开合更加方便,提高了使用的便利性,同时也可以增加门窗的美观度。
3. 机械设备在机械设备中,铰链也扮演了重要的角色。
它们常被用来连接各种部件,使得设备能够实现旋转、运动等功能。
四、铰链的选购在选择铰链时,需要根据不同的使用场景和需求来进行选购。
一般需要考虑以下几点:1. 材质铰链的材质是选择的重要因素之一,常见的有不锈钢、铝合金、钢材、尼龙等。
不同材质的铰链具有不同的耐用性和承重能力,需要根据具体的使用场景来选择合适的材质。
2. 结构铰链的结构也是一个需要考虑的因素,在选择时需要考虑其能够承受的重量、使用寿命、防锈性等。
常见的结构有单螺旋、双螺旋、三螺旋等,每种结构都有其适用的场景。
6种铰杆-杠杆二次增力液压夹具的性能比较
6种铰杆-杠杆二次增力液压夹具的性能比较
席川;钟康民
【期刊名称】《机械制造》
【年(卷),期】2007(045)006
【摘要】介绍了6种铰杆-杠杆二次增力液压夹具的工作原理和结构特点,分析比较了它们的空间体积、输出力和结构刚性,并给出了相应的力学计算公式.
【总页数】2页(P61-62)
【作者】席川;钟康民
【作者单位】苏州大学,机电工程学院,江苏,215021;苏州大学,机电工程学院,江苏,215021
【正文语种】中文
【中图分类】TH132;TH137.9
【相关文献】
1.基于铰杆-杠杆增力的两种液压夹具的技术性能对比 [J], 杨益;钟康民
2.基于液压缸的铰杆—杠杆增力双向夹紧液压夹具 [J], 刘扬;钟康民
3.基于无杆活塞缸的铰杆-杠杆增力双向夹紧液压夹具 [J], 王兵;钟康民
4.基于无杆活塞缸的对称双铰杆增力液压夹具 [J], 苏东宁;钟康民
5.解决铰杆-杠杆增力液压夹具自由度不足的新方法——滚动高副取代低副法 [J], 孙承峰;钟康民
因版权原因,仅展示原文概要,查看原文内容请购买。