火电厂给水控制系统仿真
火电机组DEH仿真控制系统

DEH仿真控制系统的未来研究方向
优化算法
未来DEH仿真控制系统的研究将更加注重优化算法的研究和应用, 以提高系统的控制精度和响应速度。
故障诊断和预防
随着安全意识的提高,DEH仿真控制系统的故障诊断和预防技术将 得到更加广泛的研究和应用。
人工智能和机器学习
人工智能和机器学习技术在DEH仿真控制系统中的应用将得到更多 的研究和探索,以提高系统的智能化水平。
安全性
由于DEH仿真控制系统是在计算机上运行的,因此可以 避免真实操作中可能出现的危险。
ABCD
灵活性
DEH仿真控制系统可以根据需要进行调整,以适应不同 的实验需求。
低成本
DEH仿真控制系统运行成本低,可以重复进行实验,大 大降低了实验成本。
DEH仿真控制系统面临的挑战
01
模型建立
建立精确的数学模型是DEH仿真 控制系统的关键,但实际操作中
DEH仿真控制系统的基本组成
控制器
负责接收操作指令和系统反馈信号,根据控 制策略计算出控制输出信号。
执行器
接收控制输出信号,驱动被控对象进行动作, 实现系统的控制目标。
传感器
用于检测被控对象的参数,如温度、压力、 流量等,并将检测信号反馈给控制器。
仿真模型
模拟实际系统的动态行为,为控制器提供系 统状态信息和反馈信号。
。
在仿真环境中,可以对控制策略进行反复试验和优化,以实现 更高效、更安全的机组控制。
DEH仿真控制系统还可用于培训新员工,使他们在实际操作前 熟悉机组的工作原理和操作流程。
其他领域的应用
船舶动力系统
核能发电
DEH仿真控制系统也可应用 于船舶动力系统的模拟与控 制,提高船舶运行的稳定性。
火电厂给水控制系统仿真
第一章绪论1.1课题的研究背景及意义火力发电厂在我国电力工业中占有主要的地位,是我国的重点能源工业之一。
大型火力发电具有效率高、投资省、自动化水平高等优点,在国内外发展快。
随着电力需求的日益增长,以及能源和环保的要求,我国的火电建设开始向大容量、高参数的大型机组靠拢。
但是,火电机组越大,其设备结构就越复杂,自动化程度也要求越高。
给水控制系统是火电厂非常重要的控制子系统。
汽包水位是锅炉安全运行的重要参数,同时他还是衡量锅炉汽水系统物质是否平衡的标志。
随着机组容量的增大,运行参数的不断提高,对汽包水位的的控制品质要求也会越高,为了机组的安全、经济运行,需要采用设计更合理、功能更完善的控制系统,给水自动控制系统可以大大减轻人员的劳动强度,汽包水位的稳定性也得到极大的提高,保障了几组的安全、稳定运行。
为了实现电能生产的“高效‘洁净、经济、可靠、安全”的要求,火电厂汽轮机的参数经历了低压、中压、高压、超高压、亚临界和超临界参数的发张阶段,目前正向超临界参数的方向发展。
1.2国内外的发展状况我国自上世纪80年代引进亚临界火电机组技术以来,虽在改进、优化和发展取得一定的经验,并使300MW、600MW的亚临界火电机组成为我国火力发电的主力机组,但这种亚临界机组依然存在重大问题,这已成为制约我国电力工业发展的瓶颈。
因此,借鉴国际上最先进的技术,研究并发展600MW~1000MW超临界火电机组,是提高电机机组的热效率,实现节能降耗和改善环保状况的有效途径。
随着火电机组的参数的提高,水的饱和温度相应提高,气化潜热减少;当压力提高倒22.115MPa时,气化潜热为零,气和水的密度差也等于零,该压力成为临界压力。
在临界点时,饱和水与饱和蒸汽之间不再有汽、水共存的两相区存在。
当机组工作参数高于这一临界状态参数时,称之为超临界机组。
对蒸汽动力装置循环的理论分析表明,提高循环蒸汽的初始参数和降低循环的终结参数都可以提高循环的热效率。
火力发电厂参数优化控制的建模及仿真
火力发电厂参数优化控制的建模及仿真火力发电是当今社会中最常见的发电方式之一。
无论是小型发电站还是大型的电厂,火力发电的机组都采用相同的工作原理。
利用燃料在高温高压下进行氧化反应,产生的热能转化为汽轮机的动能,最终驱动发电机发电。
但是,由于燃烧特性受到多种因素的影响,使得火力发电的调控较为困难。
为了优化火力发电过程,我们需要通过建立数学模型,进行仿真和优化。
一、火力发电厂的工作原理火力发电的机组主要由以下部分构成:锅炉,汽轮机,发电机和控制系统。
锅炉是燃料在高温高压下进行氧化反应的地方,这个过程会将水加热成为高温高压的蒸汽,并将燃料进行完全燃烧,生成高温高压的烟气。
烟气从炉膛进入锅炉内壁,并在通过水管的过程中旁通换热,使得管内的水被加热成为蒸汽。
最终,这些高温高压的蒸汽通过汽轮机转动,并驱动发电机产生电能。
二、控制系统在火力发电过程中的作用灵活地控制和调节器组操作是火力发电系统优化的重要组成部分。
这个过程需要实施一些最佳调节策略,以确保系统始终处于最合适的状态。
在发电厂中,系统的控制和优化主要是通过对燃烧控制、水循环控制和机组启停的调整来实现的。
1. 燃烧控制燃烧是火力发电厂的核心,然而燃烧过程受到很多因素的影响,如燃料质量、燃料配比、环境氧气含量等。
因此,燃烧控制需要从这些因素入手进行优化。
调节器组应该考虑燃料成分、燃料供应速度、燃烧温度等因素来进行燃烧控制,以便在不影响系统效率的情况下,最大化的发电产量。
2. 水循环控制高温高压的烟气在加热水管时,会将水加热转化为蒸汽。
随着汽轮机的旋转,蒸汽被冷却,然后被再次送回锅炉进行循环。
因此,水循环控制是调控的另一重要方面。
最终目标是,通过只加热所需的水量来最大限度地减少焚烧用于锅炉的燃料,从而提高发电效率。
3. 机组启停最后一个需要考虑的因素是机组启停过程的控制。
当市场需求低,或者系统出现故障时,需要及时控制机组的启停过程。
在开启和关闭机组时,需要考虑温度变化、燃油等级、停机时间等因素。
火电厂给水系统仿真
火电厂给水系统仿真简介火电厂的给水系统是保证发电设备正常运行的重要组成部分。
为了提高火电厂的运行效率和安全性,需要对给水系统进行仿真和优化。
本文将介绍火电厂给水系统仿真的背景和意义,并提供一个基于Matlab的仿真模型。
背景和意义火电厂的给水系统主要包括水处理和输送两个方面。
水处理是指通过净水设备将进入火电厂的原水经过处理,达到符合发电要求的水质标准;输送是指将处理后的给水输送到蒸汽发生器,作为发电过程中的热力传递介质。
火电厂给水系统的稳定运行对保证发电设备的正常运行和电网的稳定供电具有重要意义。
通过对给水系统进行仿真,在火电厂的设计、运行和维护过程中可以更准确地预测和评估系统的性能,并进行优化。
仿真模型本文提供的仿真模型是基于Matlab软件开发的。
它包括了火电厂给水系统的主要组件和连接关系,以及系统的输入和输出。
下面将对模型的各个部分进行详细介绍。
水处理部分水处理部分是给水系统的关键环节,它主要通过一系列的处理设备将进入火电厂的原水进行处理,使其符合发电要求的水质标准。
在仿真模型中,水处理部分包括以下几个主要组件:•水池:用于存放原水,并通过进水管道将原水输入到后续的处理设备中。
•预处理装置:包括沉淀池、过滤器等设备,主要用于去除原水中的悬浮物和杂质。
•软化器:用于将水中的硬度物质去除,以防止在后续的设备中产生结垢现象。
•除氧器:用于去除水中的氧气,以防止蒸汽发生器内的腐蚀。
•调节阀:用于调节水流量和压力,使其符合系统的要求。
输送部分输送部分是将经过水处理的给水输送到蒸汽发生器的关键环节。
在仿真模型中,输送部分包括以下几个主要组件:•水泵:用于将处理后的给水提升到蒸汽发生器的一定高度,以满足正常发电过程的需求。
•输水管道:连接水泵和蒸汽发生器的管道系统,负责输送给水。
•控制阀:用于控制管道中的水流量和压力,以满足系统运行的要求。
•蒸汽发生器:接收给水并将其加热为蒸汽,以驱动发电设备运行。
输入和输出仿真模型的输入主要包括原水的流量和水质标准,以及火电厂的运行参数(如发电机负荷)。
600MW机组给水控制系统分析与仿真

600MW机组给水控制系统分析与仿真研究摘要随着我国电力市场的实际情况和国民经济发展的需要,电站项目朝着高参数、大容量的方向发展已成为大势所趋,近年来超临界发电机组在国内得到迅速发展和应用。
由于超临界机组各子系统间的耦合性强,机组的蓄热能力差,常规的控制方案往往难以取得满意的控制品质,为使超临界机组具有良好的调节品质并能确保长期稳定及经济的运行,必须采用先进的自动控制策略。
超临界直流锅炉给水控制直接关系到机组的安全性和经济性,是超临界机组正常运行的关键。
针对给水控制的大迟延、大惯性和时变性等特点,提出基于给水温度信号的前馈-反馈控制策略,提高了机组水煤比的控制质量。
仿真结果表明,改进的控制方法可以减小中间点焓值在不同扰动下的变化,具有较好的控制品质。
关键词:水煤比,中间点焓值,给水温度信号,给水控制仿真Water Supply Control System Analysis andSimulation of 600MW UnitABSTRACTIt becomes a trend that the power station projects go forward to high parameter and large capacity in consideration of china’s actual situation and the demand of the national economic development. In the past years the super-critical unit were applied and developed quickly.Because of the strong coupling between the sub systems, the thermal storage capability of the kind units sick, regularcontrol plan can’t not get good quality . In order to ensure the super-criticalunit run well, the advanced control strategy must be developed.The feed-water control in supercritical once-through boiler is regarded as the most considerable parameter of the unit operation that has contributed to the demand of unit safety and efficiency in the operating process. And the control of feed-forward and feed-back based on the feed-water temperature signal was employed with respect to the very extent in the delay,inertia and time-variant property,which improved the control quality of the water-fuel ratio in particular.The simulation results showed that the favorable control mode was accounted for the capable of decreasing the intermediate point enthalpy variation at different disturbs value and the quality of control.KEY WORDS:water-fuel ratio,intermediate point enthalpy,feed-water temperature,feed-water control simulation.目录摘要 (I)ABSTRACT (II)目录 (III)1 前言 (1)1.1 选题背景和意义 (1)1.2 国内外研究发展概述 (2)1.3 相关工作 (3)1.3.1 论文的主要工作 (3)1.3.2 工作难点 (3)1.4 小结 (3)2 超临界直流锅炉概述 (4)2.1 超临界机组简介 (4)2.2 超临界直流锅炉 (4)2.2.1 直流炉的工作原理 (4)2.2.2 超临界直流炉的静态特性 (5)2.2.3 超临界直流炉的动态特性 (6)2.3 超临界机组的控制特点 (7)2.3.1 汽包锅炉的控制特点 (7)2.3.2 超临界锅炉的控制特点 (7)2.3.3 超临界直流炉和汽包炉控制系统比较 (8)2.3.4 超临界锅炉的控制任务 (8)2.4 超临界直流锅炉给水控制系统 (9)2.4.1 水煤比控制 (9)2.4.1.1 水煤比调节理论分析 (9)2.4.1.2 水煤比控制 (10)2.4.2 两种给水控制系统对比分析 (12)2.4.2.1中间点温度给水控制系统 (12)2.4.2.2 中间点焓值给水控制系统 (14)2.4.2.3 对比 (14)2.5 本章小结 (15)3 超临界直流炉给水控制方法分析与改进 (16)3.1 直流锅炉给水控制 (16)3.1.1给水控制方案 (16)3.1.2改进的给水控制方案 (16)3.2 前馈-反馈控制系统基本原理 (18)3.3 本章小结 (20)4 运用实例及仿真整定 (21)4.1 系统数学模型 (21)4.2 仿真工具介绍 (21)4.2.1 PID控制器参数整定 (21)4.2.2 前馈补偿环节的计算 (23)4.3 结论 (25)4.4 本章小结 (25)5 超临界直流锅炉给水启动系统 (26)5.1 设置直流炉给水启动系统的意义 (26)5.2 锅炉启动系统 (26)5.2.1 外置式启动分离器系统 (26)5.2.2 内置式启动分离器系统 (27)5.3 直流锅炉给水启动旁路系统 (27)5.4 本章小结 (28)6 结论与展望 (29)6.1 全文总结 (29)6.2 展望 (29)参考文献 (30)致谢 (31)1 前言1.1选题背景和意义电力在中国国民经济中有着举足轻重的作用。
仿真控制在电厂化学水处理系统中的应用研究

3.3
8 6 4 2 O 0 50 100 150 200 250 300
T(.|c)
图4给水温度对联氨与氧反应速值的影响
2006年火电厂环境保护综合治理技术研讨会论文集
Ceo,|_=95×103C
r7、
(8)
(1) (2) (3)
式中:Cl—p043-}知E(mD儿);
C2~HP04S-浓度(tool/L): KI、K2、K3一电离常数,Kl--7.6×10一、
K2=6.2x 10~、K3---4.2X 10一”:
圈1电厂化学水处理系统的主控界面
2006年火电厂环境保护综合治理技术研讨会论文集
图2一级复床除盐工艺流程界面
反应速率越快,并且随着温度的升高,温度对联
3仿真实验
仿真实验是仿真研究过程中的重要组成部 分。本文依据仿真内容所做的仿真实验包括:给 水中阱H3】对[C02】的影响、温度对给水pH值的 影响、给水中温度对联氨与氧反应速率的影响、
pdf文档可能在WAP端浏览体验不佳。建议您优先选择TXT,或下载源文件到本机查看。
2006年火电厂环境保护综合治理技术研讨会论文集
仿真控制在电厂化学水处理系统中的应用研究
陈颖敏,左俊利,惠远峰,程立国,
(华北电力大学环境科学与工程学院,河北保定071003)
依次调整炉水旺,0广】为2mg/L、3mg/L、4mg/L、 5mg/L,R与pH值对应,pHt为R=2.4,pH2为R=2.6, pH3为R=2.7。实验结果如图5所示,在R值不变
电厂化学水处理设备烦杂,耗费了运行人员的 大部分精力,仿真系统的应用,将会提高他们的工 作效率。综上所述,仿真系统在电厂化学水处理方 面将有着广阔的应用前景。
火电厂集控运行专业《技能训练5 单级三冲量给水控制系统的仿真》
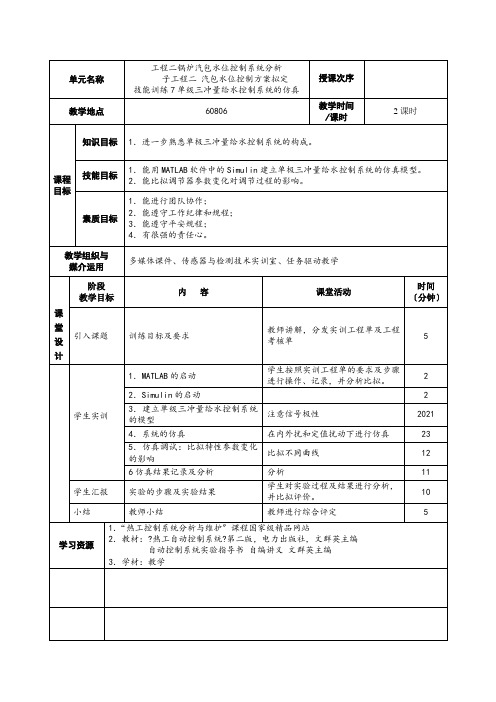
工程二锅炉汽包水位控制系统分析
子工程二 汽包水位控制方案地点
60806
教学时间
/课时
2课时
课程目标
知识目标
1.进一步熟悉单极三冲量给水控制系统的构成。
技能目标
1.能用MATLAB软件中的Simulin建立单极三冲量给水控制系统的仿真模型。
学生汇报
实验的步骤及实验结果
学生对实验过程及结果进行分析,并比拟评价。
10
小结
教师小结
教师进行综合评定
5
学习资源
1.“热工控制系统分析与维护〞课程国家级精品网站
2.教材:?热工自动控制系统?第二版,电力出版社,文群英主编
自动控制系统实验指导书 自编讲义 文群英主编
3.学材:教学
ATLAN仿真进一步加深对单级三冲量控制系统的理解。
5
学生实训
1.MATLAB的启动
学生按照实训工程单的要求及步骤进行操作、记录,并分析比拟。
2
2.Simulin的启动
2
3.建立单级三冲量给水控制系统的模型
注意信号极性
2021
4.系统的仿真
在内外扰和定值扰动下进行仿真
23
5.仿真调试:比拟特性参数变化的影响
比拟不同曲线
12
6仿真结果记录及分析
分析
11
2.能比拟调节器参数变化对调节过程的影响。
素质目标
1.能进行团队协作;
2.能遵守工作纪律和规程;
3.能遵守平安规程;
4.有很强的责任心。
教学组织与
媒介运用
多媒体课件、传感器与检测技术实训室、任务驱动教学
阶段
教学目标
内容
课堂活动
时间
300MW火电厂仿真运行操作流程

300MW火电厂仿真运行操作流程第一节机组冷态启动4.1.1.机组启动前的预备4.1.1.1.确认如下安全条件已具备:●检查机组所有检修工作已终止,工作票已终结,安措已拆除,场地已清理。
●机组所有消防器材、设备、系统完好可用。
●机组所有通道畅通、栏杆完好、正常照明已投入、事故照明良好备用。
4.1.1.2.预备好机组启动时所必需的各种仪器、外表、工具和记录本等。
4.1.1.3.检查机组6KV各单元段、380V各段、UPS系统、直流系统、就地MCC 柜已正常送电。
●(ELEC →4B) 合6502、20201、20101、650、22081、2208、21031、2103●(ELEC →4C) 6KV 1A SYS 中除2101全部投入●(ELEC →4D) 6KV 1B SYS 中除2201全部投入●(ELEC →4F) 汽机1A变,汽机1B变投入,联络开关2B断开,2C刀闸投入,联锁投入(画面下面),汽机保安段由汽机工作1A段供电,3B不合,其它都合上。
●(ELEC →4E) 锅炉1A变,锅炉1B变投入,联络开关2C断开,2A刀闸投入,联锁投入(380 BLR SEQ CB LIANSUO),锅炉保安段由锅炉工作1A段供电(合4A、3C、4C、2B、5C ),柴油机备用。
锅炉底层MCC1A段、MCC1B 段分别由锅炉1A段、锅炉1B段供电,联络开关断开,刀闸投入,联锁投入(MCC1投连锁)。
锅炉运行层MCC1A段、MCC1B段分别由锅炉1A段、锅炉1B段供电(合5A、8C、9C、1D、3B),联络开关断开,刀闸投入,联锁投入(MCC2投连锁)(注:此画面2C、6A、12、22、7A没开)。
●(ELEC →4H) 柴油机方式开关处于“远方”、本体选择开关处于“AUTO”位。
回路中刀闸投入,开关断开。
(4B、6B、3B、2E不合,其它合上)●(ELEC →4G) COM_LTG中3B、2E、3D、7E不合,其它合上。
火电机组协调控制系统预测控制的仿真研究
火电机组协调控制系统预测控制的仿真研究发布时间:2022-09-26T03:50:05.897Z 来源:《中国电业与能源》2022年10期作者:罗颖[导读] 随着电网技术的不断发展,大量的火力发电机组也在进行相应的变化罗颖广东红海湾发电有限公司 516623摘要:随着电网技术的不断发展,大量的火力发电机组也在进行相应的变化,火电机组需要有良好的负荷适应能力,能够存在较强的电荷变化情况,在运行的过程中也需要对机组的各项数据进行控制。
火电机组想要能够运行就需要建立相应的控制系统,一般来说控制系统是由多个系统建立起来的,并且之间会有存在相应的联系,因此火电机组需要对控制方式进行相应的改善,只有火电机组在响应电网负荷要求时,有效的分配工作才能够保证火电机组运行的安全。
火电机组的控制系统能够有效的了解当前火电机组的运行情况,为了取得良好的控制品质,就需要对大型火电机组进行优化和完善。
关键词:协调控制系统;先进控制技术;火力发电机组前言随着电力工业的发展,高参数、大容量的火电机组已经成为了电网的主力机组,这些机组的安全可靠运行,不仅会直接决定电能的产量和质量,同时也会决定整个电能生产过程的能源消耗,因此需要保证火电机组的协调运行,从而让火电机组适应电网调峰的要求。
火电机组需要解决运行过程中的能源消耗问题,在预习的过程中尽量的减少没资源的使用,从而提高电力企业的经济效益。
火电机组主要是由锅炉和汽轮发电机组成,在运行的过程中,火电机组需要利用计算机来对各个系统进行控制,解决火电机组过程中出现的关键技术问题,从而为火电机组的运行打下基础。
一、协调控制系统的概述现代电厂是复杂的流程工业系统,有很多控制回路和子系统构成协调,控制系统是整个控制系统的最上层,能够有效的处理各项流程。
协调控制系统能够利用数学来建立相应的控制模型,并且在系统过程中提出了算法控制矩阵控制,预测控制等等控制算法作为一种先进的控制策略,协调控制系统已经在很多行业中都运用起来,并且引起了社会的广泛关注。
火电厂过程控制系统仿真建模研究

火电厂过程控制系统仿真建模研究摘要:由于火电厂控制系统十分复杂,存在大最迟延、非线性、祸合等因素.经典的辨识方法无法对其进行辨识。
本文借助Matlab软件采用先进辨识算法及模糊控制方法对协调控制系统(CCS)和自动发电控制(AGO系统进行建模、仿真及其优化,用以克服上述缺点,望与同行共同切磋。
关键词:自动发电控制、建模、辨识Abstract: as the power plant control system is extremely complex, the delay, are the major factors to nonlinear, close. Classic identification method can not the identification. This paper makes use of the Matlab software adopts advanced identification algorithm and method of fuzzy control is to coordinate control system (CCS) and of automatic generation control (AGO system modeling, simulation and optimization, to overcome the shortcomings, hope and counterparts from common.Keywords: of automatic generation control, modeling, identify火电厂过程控制系统火力发电机组的生产过程自动化随着科学技术的发展和自动化水平的提高,它所包含的功能越来越丰富,概括起来有以下几个方面:自动检测,顺序控制,自动调节,自动保护。
单元机组自动控制的功能是通过各种自动化系统实现的.大容量单元发电机组的自动化系统土要可分为计算机监视(或数据采集)系统、单元机组协调控制系统、锅炉自动控制系统、汽轮机自动控制系统、发电机和电气控制系统、辅助设备自动控制系统等。
火电厂给水系统仿真
火电厂给水系统仿真火电厂给水系统是一个重要的设备系统,主要用于保证火电厂的正常运转。
该系统主要是由给水泵、锅炉、蒸汽发生器、凝汽器等设备组成。
然而,这些设备的运行关系十分复杂,因此需要进行相关仿真,以确保系统的稳定性和安全性。
本文将详细介绍火电厂给水系统仿真的过程和意义。
一、为什么需要仿真?火电厂给水系统是一个极为复杂的系统,其中包含了多个机电设备和各种流体流动现象。
因此,对于这个系统的研究和优化必须依赖于仿真技术。
下面是具体原因:1.系统模拟仿真可以模拟给水系统的真实运行过程,产生虚拟的系统模型。
这样可以灵活地调整各个元件和参数的组合,以便对整个体系进行操作、分析和优化。
2.系统优化利用仿真可以轻松预测和发现系统的运行稳定性和安全性问题。
通过这个方法可以快速评估各个元件的性能,并优化系统的设计和方案。
3.系统保护现代给水系统因为负载和工作环境变化繁多,系统的保护十分重要。
仿真可以模拟突发故障和异常事件,有效预防和解决问题。
二、仿真模型构建在仿真的过程中,需要按照实际情况构建真实精确的系统模型。
这个过程主要有以下几个步骤:1.环境准备仿真需要选取合适的仿真软件,并根据系统要求设计具有代表性的工作方案和情景,这是一个决定仿真效果的基础工作。
2.流体应力分析针对火电厂给水系统,需要进行流体力学分析,以便解决系统中涉及的流体运动和压力,包括各个元器件间的流动阻力、流体动力机能分析和泵的效率分析。
另外,还需要搭建模拟环境,以便收集数据并对模型进行实时优化。
3.传递函数分析传递函数是指输能量输入与输出之间的转化关系函数。
对于火电厂给水系统来说,传递函数是建立系统流量、压力、温度等基础参数间的转换关系,用于系统的控制、调节和管理,配合系统仿真可以模拟系统的复杂运作过程。
三、模型优化和仿真结果分析1.模型优化仿真过程中,如果系统参数的实际值与模型的仿真值有差异,则需要对系统和模型进行优化。
优化可以根据仿真结果轻松发现系统偏差并进行纠正,同时也可以对系统的设计改进提供可靠的数据依据。
基于系统辨识的超临界600MW机组给水控制热工对象建模与仿真

关键 词 : 临界 机组 ; 超 给水 控制 ; 系统辨识 ; 建模 ; 真 仿 中图分 类号 : K 2 . T 23 5 文献标 志码 : B 文章编 号 :0 9— 2 0 2 1 )9— 0 6— 4 10 3 3 (0 1 0 0 2 0
T eMoe n n i lt no edWae o to T ema O jc h dl ga dSmuai nF e - t C nrl r l bet i o r h
d e t he c a a trsi fl r e s e i c h a fr fie a ,i i e s n bl a a i g it r d ae u o t h r c e tc o a g p cf e to erg r nt t s r a o a e t tt k n n e me it i i h
间点进入饱和区, 即使进入了饱和区 , 与中间点温 度控制相比也可以较快地退出饱 和区 , 在高负 荷时 , 根据中间点温度控制给水流量更容易引起 超温。而且超 临界 机 组 工质 存在 一个 大 比热
( )…,( r。并选定系统的分子多项式阶 2 , Y M)
次为 m一 , 1分母多项式阶次为 n 及系统 的纯滞后
o tu aai sp r r codn eD Sdt, uligads h n te a cl d l y up t t s u e o.A crig ot C a b i n n i  ̄iga h m t a mo e b d i t h a d mp ma i
识工具箱中, 函数 d ed用来去除数据 中的趋势 tn r
项, 函数 i h利 用 滤 波器 对 数 据进 行 滤 波 , 用 d i f 利
MW火电厂仿真运行操作流程

MW火电厂仿真运行操作流程火力发电是目前中国主要的发电方式之一,其运行操作流程的顺序和方法对于保证电厂的安全稳定运行具有重要意义。
下面是一个MW火电厂仿真运行操作流程的简要介绍。
1.运行前准备阶段:-将各设备恢复到正常运行条件:检查锅炉、汽机完整性,并进行必要的维护和修理。
-确认备用设备的可用性:确保备用锅炉、汽机等设备处于完好状态,以备不时之需。
-确认供电可靠性:检查发电机组和相应的电气设备,确保供电可靠和稳定。
2.启动阶段:-启动锅炉:先启动辅助系统,依次启动给水系统、风机系统、燃油输送系统等,最后点火启动锅炉。
-控制炉膛温度:调整给水流量、燃烧控制系统等,控制好炉膛温度,提供足够的蒸汽。
-启动汽机:按照操作规程,启动汽机,并逐渐提高负荷。
3.正常运行阶段:-控制燃料供给:根据实际需求和外部条件变化,调整燃料的供给量和质量,以保持稳定的发电负荷。
-监测参数:实时监测温度、压力、流量等参数,确保设备运行在安全、稳定的工作范围内。
-排放控制:使用污染物监测仪器,定期监测排放情况,并根据监测结果进行调整,以符合环保要求。
-维护保养:定期进行设备的维护保养,如清洗锅炉、检查机组的磨损情况等,以确保设备的长期可靠运行和安全。
4.停机阶段:-降低负荷:根据运行情况和负荷需求,逐渐降低负荷,减少蒸汽的产生。
-停机准备:根据操作规程,进行相应的准备工作,如停炉、停汽机等。
-关停设备:按照操作规程,逐步关闭辅助设备,如风机、水泵等。
-检查设备状态:对设备进行检查,确保设备正常关闭和安全。
以上是一个MW火电厂仿真运行操作流程的简要介绍。
需要注意的是,具体的操作流程可能会因为不同的火电厂运营模式、设备配置和管理要求而有所差异,操作人员需要遵守相应的规程和操作要求,确保发电过程中的安全和稳定运行。
发电厂给水系统的仿真模型
发电厂给水系统的仿真模型
尹静
【期刊名称】《山东电力技术》
【年(卷),期】2003(000)006
【摘要】讨论了发电厂热力系统的建模方法,建立了发电厂给水系统的仿真模型,模型的运算结果与实际运行情况的比较表明本模型准确地描述了给水压力及流量的瞬态响应特性,为新设备、新机组的仿真模型的建立与进一步完善奠定了基础。
【总页数】4页(P5-8)
【作者】尹静
【作者单位】山东电力研究院,山东济南250002
【正文语种】中文
【中图分类】TM621.2
【相关文献】
1.300MW机组除氧给水系统的仿真模型 [J], 徐二树
2.火力发电厂补给水系统浮船取水结构的创新应用 [J], 何启宏
3.垃圾焚烧发电厂锅炉给水系统设计总结探析 [J], 聂克泳
4.火力发电厂水消防给水系统水力计算研究 [J], 张捷;胡华强
5.望亭发电厂改建工程锅炉补给水系统中的“超滤”设计及应用 [J], 王舂;云文泽;胡怡
因版权原因,仅展示原文概要,查看原文内容请购买。
MW单元机组汽包水位控制系统分析设计与仿真doc
封面作者:PanHongliang仅供个人学习华中科技大学文华学院毕业设计(论文)题目:300MW单元机组汽包水位控制系统分析、设计与仿真学生姓名:陈正学号:0902********学部(系):机械与电气工程学部专业年级:09级热能与动力工程指导教师:周慧职称或学位:硕士2013年5月18日300MW单元机组汽包水位控制系统分析、设计与仿真摘要锅炉给水控制系统是火力发电厂非常重要地控制子系统,稳定地汽包水位是汽包锅炉安全运行地重要指标.火电厂给水系统构成复杂,汽包水位受到机组负荷、汽包压力、温度、给水量等多项参数地影响:不同负荷阶段,给水设备不同,又需要采取不同地控制方式.目前使用地火电厂给水控制系统存在着各自地不足之处,往往难以满足火电机组复杂工况地要求.针对这些情况,为了保证汽包水位维持在要求值,本文首先分析了给水控制对象地动态特性,在此基础上设计出了采用汽动调速泵、电动调速泵、调节阀三者结合地汽包水位控制系统,低负荷时通过改变旁路调节阀地开度来调节给水量,用单冲量控制系统控制汽包水位;高负荷时通过改变给水泵转速改变给水量,用串级三冲量控制系统控制汽包水位,保证对汽包水位蒸汽流量和给水流量地准确测量.给水调节阀、汽泵、电泵之间,单冲量系统和三冲量系统之间都能实现无扰切换,既能满足机组全程控制要求,又有良好地调节性能和运行经济性.关键词:锅炉给水控制;三冲量控制系统;单冲量控制系统The Design Of Boiler Feedwater Control System Of The300MW Thermal Power UnitAbstractFeedwater Control System is one of the most important control system in a thermal Power plant . Stabilization of the drum level is one of essential parameter which indicated safe operation of the drum boiler.Drum level is affected by the unit load, press and temperature of the drum,feedwater flux and etc. Because of using different equipment at different stages,it should apply different control methods.The effect of fullrange feed-water control system does not often be satisfied when power unit is in difficult situation because of its imperfect. In order to maintain the level of the drum water in requested value,Basing on analysis of feed-water character firstly, this system adopts timing which is moved by steam and electromotion-timing pump and adjusting valve. It utilizes bypass valves to regulate the feed-water and uses single impulse to control the level of drum in lower load. At the high load condition, change the rotating speed of steam or electricity feed water pumps to ensure the water level of the drum, using three impulse to control the level of drum .The level ofsteam and feed-water can be measured nicety. Non-disturbance switching can be realized among feed-water valves, steam and electricity driven pumps, single and three impulse. That not only meet the requirements of the whole-course control of the unit, but also ensure the satisfactory regulating performance and operating economics. It also have nice regulate performance and circulating economy.Keywords:Boiler feed-water control。
火力发电机组燃烧控制系统的建模和仿真

火力发电机组燃烧控制系统的建模和仿真随着能源需求的不断增长,火力发电机组作为一种高效的发电设备,在现代化的工业生产和日常生活中扮演着重要角色。
在火力发电过程中,燃烧控制系统是一个至关重要的环节。
因此,对火力发电机组燃烧控制系统建模和仿真的研究至关重要。
一、燃烧控制系统的工作原理燃烧控制系统主要由控制器、燃气阀、燃气调节器、燃烧器和燃烧室等部件组成。
控制器通过测量仪器获取5个温度信号、3个压力信号和3个流量信号等数据,然后将这些信号通过反馈回路进行比较和校正,输出控制信号,实现对燃气阀和燃气调节器的控制。
同时,燃烧器通过燃烧空气和燃气进行反应,产生高温高压的热能,从而驱动蒸汽轮机发电。
二、建模过程建模是燃烧控制系统仿真的重要步骤。
在建模过程中,需要将燃烧器和燃烧室分别建立数学模型,并通过控制器对燃气阀和燃气调节器进行控制,从而实现对燃烧过程的控制。
(一)燃烧器模型的建立燃烧器模型可以通过热力学循环和能量平衡原理进行建立。
在热力学循环中,热能的转换过程可以分为压缩、燃烧、膨胀和排放几个阶段。
在能量平衡原理中,燃烧过程中产生的热量可以通过燃烧室的换热面积来传递,从而实现蒸汽轮机的发电。
(二)燃烧室模型的建立燃烧室模型主要包括质量传递、热传递和化学反应三个方面。
通过对燃料和空气在燃烧室内的反应进行分析,可以得到反应的放热量。
其次,通过传热原理和物质质量守恒原理,可以建立燃烧室的温度、压力和质量流经历时间的数学模型。
最后,通过化学反应动力学原理,可以将反应速率和温度等参数相结合,建立化学反应动力学方程,从而得到燃烧室内燃烧反应的速率和放热量。
三、仿真过程燃烧控制系统的仿真主要包括全站仿真和局部仿真两种。
全站仿真主要是通过计算机对整个火力发电站进行仿真,模拟不同负荷和气象条件下的发电过程。
局部仿真主要对燃烧室和燃烧控制系统进行单独仿真,从而验证模型的准确性和可靠性。
仿真过程主要包括以下步骤:(一)收集数据:通过实验仪器获取燃气阀、燃气调节器、燃烧器和燃烧室等部件的数据,并存储到计算机中。
火电厂化学补给水处理仿真系统
o h h oys l in s f r s d sg e .s fn t n i ld trn — tp ig o eainn r lo eaig a jsme t, n te te r,i a o ot e i e in d I u ci s n u e sat g so pn p rt ,oma p rt du t ns mu t wa t o c i o n
sm uain y t m o ei p i lt s se o fTil ng owe pl t ch olgy r an Te n o pr e mode a oc ss l nd ope a ig p amet o we e esabl h d. as d rt n ar erm del r t i e B e s
1 阀 门 和 泵类 的 动 作 。控 制 逻 辑 发 出 动 作 信 号 后 , 迟 一 ) 延 定 时 间 动作 ( 合 设 备 运 行 情 况 , 间 视 需 要 调 整 ) 符 时 。 2 模 拟 量 的状 态 量 。 例 如 液 位 的状 态 量 ( 、 、 等 )实 ) 高 中 低 ,
模 、 业 仿 真 语 言 、 向 对 象 建 模 和 图形 自动 化 建 模 等 , 些 建 专 面 这
模 技 术 在 表 现 形 式 上 虽 然 各 不 相 同 , 在 实 现 形 式 上 基 本 上 都 但
是 采 用 高 级语 言或 者专 用 仿 真 语 言 来 编 程 实 现 。本 文 希 望探 讨
田 珊 义 ( 国家 电力监 管委 员会 东北监 管局 , 宁 沈 阳 1 0 0 ) 辽 0 6 1
摘 要
采 用 先进 的 计 算 机 仿 真 技 术 , 以铁 岭 电厂 的 化 学补 给 水 处 理 系统 为 研 究 对 象 , 立 该 系统 的 水 处 理 工 艺流 程 模 型 、 建 运 行 参 数模 型 , 开 发 化 学 补 给 水 处 理 系统 仿 真 软件 , 并 实现 启 停 操 作 、 常运 行 调 整 、 行状 态和 运行 参 数 显 示 以及 常 见 故 障 正 运 处 理 等 多种仿 真功 能 。 过 仿 真 实验 验 证 , 真 结果 基 本 达 到 了预 定 要 求 。所 开 发 的 仿 真软 件 , 可 以 用 于 教 学 和培 训 , 通 仿 既 又
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章绪论1.1课题的研究背景及意义火力发电厂在我国电力工业中占有主要的地位,是我国的重点能源工业之一。
大型火力发电具有效率高、投资省、自动化水平高等优点,在国内外发展快。
随着电力需求的日益增长,以及能源和环保的要求,我国的火电建设开始向大容量、高参数的大型机组靠拢。
但是,火电机组越大,其设备结构就越复杂,自动化程度也要求越高。
给水控制系统是火电厂非常重要的控制子系统。
汽包水位是锅炉安全运行的重要参数,同时他还是衡量锅炉汽水系统物质是否平衡的标志。
随着机组容量的增大,运行参数的不断提高,对汽包水位的的控制品质要求也会越高,为了机组的安全、经济运行,需要采用设计更合理、功能更完善的控制系统,给水自动控制系统可以大大减轻人员的劳动强度,汽包水位的稳定性也得到极大的提高,保障了几组的安全、稳定运行。
为了实现电能生产的“高效‘洁净、经济、可靠、安全”的要求,火电厂汽轮机的参数经历了低压、中压、高压、超高压、亚临界和超临界参数的发张阶段,目前正向超临界参数的方向发展。
1.2国内外的发展状况我国自上世纪80年代引进亚临界火电机组技术以来,虽在改进、优化和发展取得一定的经验,并使300MW、600MW的亚临界火电机组成为我国火力发电的主力机组,但这种亚临界机组依然存在重大问题,这已成为制约我国电力工业发展的瓶颈。
因此,借鉴国际上最先进的技术,研究并发展600MW~1000MW超临界火电机组,是提高电机机组的热效率,实现节能降耗和改善环保状况的有效途径。
随着火电机组的参数的提高,水的饱和温度相应提高,气化潜热减少;当压力提高倒22.115MPa时,气化潜热为零,气和水的密度差也等于零,该压力成为临界压力。
在临界点时,饱和水与饱和蒸汽之间不再有汽、水共存的两相区存在。
当机组工作参数高于这一临界状态参数时,称之为超临界机组。
对蒸汽动力装置循环的理论分析表明,提高循环蒸汽的初始参数和降低循环的终结参数都可以提高循环的热效率。
实际上,蒸汽动力装置的发展和进步一直都是沿着提高工作参数的方向进行的。
超临界火电技术是目前唯一先进、成熟和达到商业化应用的洁净煤发电技术。
随着火电机组容量的提高及参数的增加,机组在启停过程中需要坚实的参数及控制的项目越来越多。
超临界机组锅炉给水控制系统是超临界机组控制系统中的重点和难点。
我国火电机组的单容量不足20MW,平均供电煤耗达到399g(kw/h),比国外先进水平高70~80g(kw/h),高出25%以上,资源浪费严重,从而也加大了对大气的污染。
因此,超临界机组锅炉给水控制系统的研究至关重要。
近年来,我国通过研究超临界机组给水系统并建立了一些超临界火电机组给水系统的数学模型。
1.3本课题设计的内容主要介绍火电厂给水控制系统的安全稳定运行、节能优化运行,最终实现一套比较完善的给水控制系统策略。
结合火里发电厂单机组的控制系统,设计出锅炉给水控制系统的数学模型。
汽包水位串级冲量非线性PID控制系统是针对锅炉汽包水位控制的特点,在串级控制中,内回路采用P控制以快速消除给水扰动,该控制策略结构和算法简单,相对于PI-P控制方案,该方案具有良好控制品质和较强的鲁棒性,可有效克服蒸汽流量扰动和给水量扰动。
且在对象参数变化大时仍能获得稳定的调节。
通过汽包水位串级冲量非线性PID控制系统完成锅炉给水控制系统的数学模型。
第二章锅炉的给水控制系统2.1锅炉概述锅炉由汽锅和炉子组成。
炉子是指燃烧设备,为化石燃料的化学能转化成热能提供必备的燃烧空间。
汽锅是为汽水循环和汽水吸热以及水汽分离提供必需的吸热和分离空间。
锅炉作为一种把煤、石油和天然气等化石燃料所储藏的化学能转化成水蒸气的热能的重要设备,长期以来在工业生产中占有重要地位。
它已有两百多年的历史了,国外的锅炉控制工业在50~60年代发展很快,70年代达到高峰。
我国的锅炉工业是在新中国成立后才建立和发展起来的,1953年上海首创了上海锅炉厂,再生产和生活中起着不同的作用。
锅炉控制问题伴随着锅炉的出现也就相应的出现了,伴随着控制理论和控制技术的发展,锅炉自动化控制的水平也在逐步提高。
随着计算机在控制中的应用以及此后计算机和通讯技术的迅猛发展,计算机逐步进入了锅炉控制领域。
先进的控制理论和控制算法是过路的发展达到了一个新的高度。
从系统角度看,锅炉包括燃烧系统、:气温控制系统系统、给水控制系统和辅助控制系统。
其结构如图2-1:图1-1锅炉控制系统总图锅炉汽包水位是锅炉安全运行的一个重要参数,水位过高会使水蒸气带水,严重影响蒸汽品质,严重影响生产和安全;水位过低又将破坏部分水冷壁的水循环,引起水冷壁局部过热而损坏,尤其是大锅炉,一旦控制不当,容易使汽包满水或汽包内的水全部气化,造成重大事故。
故锅炉汽包给水系统的任务是保证汽包水位在允许的范围内。
汽包水位是锅炉运行安全的重要参数,同时它还是衡量锅炉汽水系统物质是否平衡的标志。
因此水位控制系统更是锅炉安全运行的重中之重。
随着锅炉参数的提高和容量的扩大,对给水控制提出了跟高的要求,其主要原因有:(1)汽包的个数和体积减小,使汽包的蓄水量和蒸发面积减小,从而加快了汽包水位的变化速度;(2)锅炉的容量的增大,显著提高了锅炉蒸发受热面的热负荷,使锅炉负荷对水位的影响加剧;(3)提高了锅炉的工作压力,使给水调节阀和水管系统相应复杂,调节阀的流量特性更不易满足控制系统的要求。
2.2锅炉给水控制系统的主要设备锅炉给水控制系统的设备包括:给水泵、给水调节器、汽包、管路、过热器、蒸汽管等。
2.3给水调节的任务给水自动调节的主要任务是:维持锅炉水位在运行的范围内,使锅炉的给水量适应于蒸发量。
锅炉的水位是影响按全运行的重要因素。
水位过高会影响汽水分离装置的正常工作,严重时会导致蒸汽带水增加,水过热器管壁和汽轮机叶片结垢,造成事故;对于锅炉工业蒸汽带水量过多,也要影响用户的某些工艺过程。
水位过低,则会破坏汽水正常循环,以致烧坏受热面。
水位过高或过低,都是不允许的。
所以,正常运行时汽包水位应在给定值的 15mm上下范围波动。
水位控制系统主要指调节给水量,使蒸汽量达到一个可以使锅炉安全运行的控制量。
锅炉给水调节的对象如图2.3,给水调节器控制给水量W,汽轮机耗气量D是由汽轮机控制器来控制的。
图2.3 给水调节对象给水调节对象的动态特性是指汽包水位的变化与引起水位变化的各种因素之间的动态关系。
汽包水位是指汽包中储水量和水面下汽包容积的综合反映。
所以水位的变化不仅受汽包储水量变化的影响,而且还受汽水混合物中汽包容积变化的影响。
从水位反映储水量来看,调节对象是一个无力自我平衡的对象,这是因为储水量的变化是由给水量和蒸发量一起的变化,而水位变化后不仅即不能影响给水流量,又不能影响蒸发量,所以水位调节对象是没有自动平衡能力的。
影响汽包水位变化的因素有:蒸汽流动量D,给水量W,燃烧量M,汽包压力P等。
工业锅炉的汽包水位是正常运行的重要指标之一,水位过高,产生蒸汽带水,影响用气单位的正常运行。
汽包水位过低,会影响过路的汽水自然循环,如不及时调节,就会使汽包里的水全部气化,造成锅炉爆炸。
因此,锅炉运行中,保持汽包水位在一定范围内是十分重要的自动控制问题。
影响汽包水位变化的因素很多,主要有燃烧量、给水量和蒸汽流动量。
燃烧量对水位的变化影响较缓慢,比较容易克服。
给水量和蒸汽流动量对水位的影响比较重要。
给水调节对象的动态特性是指各种扰动下汽包水位随时间变化的特性。
当扰动位阶跃扰动时,对象的动态特性称为阶跃相应曲线。
2.3.1给水量扰动下的给水量动态特性在给水量W 的阶跃扰动下,水位H 的相响应曲线如图2.3-1,如果把汽包及水循环系统当做水槽,水位的响应曲线应如图中的直线H 1,当给水温度低于汽包内的饱和水温度,给水量进入汽包后吸收了一部分原饱和水中的一部分热量,使锅炉的蒸汽产生下降,水面下的汽包总图2.3-1 给水扰动下的水位响应曲线体积V S 也就相应减小,导致水位下降。
V S 对水位的影响可以用H 2表示。
水位H 的实际响应曲线是H 1和H 2的总和。
从图中可知,响应过程有一段延时τ ,给水的温度越低,延迟时间越大。
给水扰动下的传递函数表示为G 1(S)= e s 1ε -τs (2.3.1) 其中ε1为水位的变化速度。
在给水量突然增加的瞬间,锅炉的蒸发量还未改变,给水量大于蒸发量,但水位一开始并不立即增加,因为温度较低的给水进入水循环的流量增加了,从原有的饱和汽水混合物中洗去了一部分热量,使水面下的汽包容积减小。
实际上也是给水有一定的冷去作用,使一部分汽变成了水。
减轻了汽包内的沸腾,因此使水位降低,经过一段延迟,水才能经过水管进入汽包使水位上升。
在此过程中,负荷未发生变化,汽包内的水仍在蒸发。
由H 曲线可以看出给水控制对象内绕的特点是:给水扰动刚刚加入,由于水的温度过低,水位的变化H 变化很慢,经过一段时间后水位开始按一定的速度上升,如果不能是给水量和蒸发量平衡,那水位也就不能确定。
水位在给水扰动下的传递函数可表示为:W h (s)=τs)s(1ετs 1ετs ε+=+-=W H其扰动传递方框图如2.3-2,可近似认为是一个几分环节和一个惯性环节的串联和并联的两种形式。
图2.3-2给水扰动传递方框图2.3.2蒸汽扰动下的给水动态特性在汽机耗气量D 的阶跃扰动下,水位H 的响应过程如图2.3-2.当汽机耗气量D 突然阶跃增加时,一方面改变了汽包内的物质平衡状态,使水位下降,图中H 1表示把汽包当作电脑为对象时水位应有的变化;另一方面,由于耗气量D 的增加,迫使锅炉内气泡增多;同时由于燃烧量维持不变,汽包内的压力P d 下降,使水面下的蒸汽泡膨胀,总体积V S 增大,从而导致汽包的水位上升,如图中H 2所示。
汽包水位H 的实际响应过程是H=H 1+H 2.对于大型锅炉来说后者的影响要大于前者,因此在负荷阶跃增加后的一段时间内水位不但不下降,反而明显上升。
这种反常现象通常称为“假水位”现象。
图2.3—2汽机耗气量D 阶跃扰动下的水位响应曲线负荷扰动下汽包水位的传递函数可表示为:G 2(s)=-( s ε2- Ts K1 )式中,ε2为反映物质平衡关系的水位上升速度,T 和K 分别代表图2.3—2中曲线H 2的时间常数和增益。
H 1表示只考虑储水量变化的水位反映曲线;H 2表示水面下汽泡容积变化的水位反映曲线;H 表示实际水位反应曲线(H=H 1+H 2) 两曲线的叠加,即图中的曲线H ,由图可知,负荷变化时汽包水位的动态特性具有特殊的形式:负荷增加时,蒸发量大于给水量,但水位不降反而迅速上升;负荷突然减小时,水位先下降,然后迅速上升,这是“虚假水位”现象。
虚假水位的变化和锅炉的特性有关。
所以,汽包水位调节对象的动态特性有以下几点:(1)调剂通道中存在延迟和惯性,并且无自我平衡能力。