ACS运动控制 引领世界最先进技术
基于ACS运动控制的LED晶片分选系统设计

控制技术・ 116 ・计算 机测 量与控制 2021 29(5)Computer Measurement & Control文章编号:1671 - 4598(2021)05 - 0116 -06DOI : 10.16526/ki.11 — 4762/tp.2021. 05.023中图分类号:TP510. 8060文献标识码:A基于ACS 运动控制的LED 晶片分选系统设计张永昊,宋华军,武田凯,韩旭(中国石油大学(华东)海洋与空间信息学院,山东青岛266580)摘要:为了提高LED 晶片分选机的分选速度和精度,设计了基于IPC+ACS 运动控制的LED 晶片分选系统;分析了晶片分选过程直线电机定位、直驱电机旋转以及音圈电机拾取三部分的时序,并结合电机性能分别规划了3类电机的定位时间;以直驱电机为例分析了在SPiiPlus MMI 软件环境中调试电机电流环、速度环和位置环以及频域稳定性的过程,并最终给出3类电机的定位时间和定位误差;设计了吸嘴和顶针接触式剥离拾取晶片的方案,利用ACSPL +语言编写拾取动作的程序,并在速度环和 位置环曲线中加以验证;在ZKMY —P10型号的分选机分选平台进行了连续分选测试,实验结果表明,分选机的X/Y 轴定位精 度为士0.5mil ,晶片分选的平均速度为125 ms/片。
关键词:晶片分选;ACS 运动控制;SPiiPlus MMI ; LED 分选机LED Chip Sorting System Design Based on ACS Motion ControlZhang Yonghao , Song Huajun , Wu Tiankai , Han Xu(School of Ocean and Spatial Information , China University of Petroleum, Qingdao 266580 , China)Abstract : In order to improve the sorting speed and accuracy of the LED chip sorting machine , an LED chip sorting system based onIPC+ACS motioncontrolisdesigned Thepositioningofthelinearmotor ,therotationofthedirectdrivemotorandthevoicecoilmotorpicksupthetimingofthethreeparts , andcombinesthemotorperformancetoplanthepositioningtimeofthethreetypesof motors. Taking the direct drive motor as an example , the debugging of the motor current loop , speed loop, position loop and frequen cy in the SPiiPlus MMI software environment is given. The process of domain stability verification , and finally the debugging results ofthethreetypesofmotorsaregiven Aplanforpickingupthechipbycontactpeelingofthesuctionnozzleandthimbleisdesigned ,andthepickingactionprogramiswri t eninACSPL+languageandverifiedonthespeedandpositioncurve Thecontinuoussorting test was carried out on the sorting platform of the ZKMY 一P10 type sorter. The experimental results show that the X/Y axis positio-ningaccuracyofthesorteris 士0 5 mil , andtheaveragespeedofchipsortingis125ms /pieceKeywords : chip sorting ; ACS motion control ; SPiiPlus MMI ; LED sorting machineo 引言随着半导体技术的飞速发展,全球的LED 行业已经进 入一个新时代,LED 以其省电、寿命长、响应速度快等优点,已经广泛应用于信号灯、显示屏、舞台灯等领域。
力矩电机的控制系统设计与性能实验论文

力矩电机的控制系统设计与性能实验摘要现代高档数控机床的发展对转台旋转进给伺服性能提出了越来越高的要求,在各种数控转台中,传统的驱动方式难以实现高精度加工。
本文采用KOLLMIRGEN力矩电机直接驱动数控转台,消除了中间传动环节,具响应速度快、动态刚度和定位精度高等特点。
本文依据“零传动试验台”的具体要求,采用了“NC嵌入PC”的开放式数控系统,采用工控机作为上位机,来处理数控系统中的弱实时性任务,用PMAC运动控制卡作为数控系统的控制器,完成数控系统中的强实时性任务;安装了PMAC运动控制卡的IPC与Danaher Motion伺服驱动器、力矩电机组成了三环闭环的控制系统;利用PMAC提供的PID执行程序在线调节整个系统的PID参数,优化系统的动态性能;利用RENISHAW激光干涉仪测定电机的定位误差并编写误差补偿程序,实施误差的在线补偿。
通过对电机的调试和检测,电机的性能达到各项设计要求。
关键词:力矩电机,PMAC, RENISHAW激光干涉仪Design of Torque Motor Control System andPerformance TestABSTRACTThe performance of the rotative feed servo is more and more important with the development of modern advanced numerical control machine ,in various NC rotary tables, the traditional drive mode is very difficult to implement high precise processing. The text taking kollmorgen direct drive NC rotary table, in this drive mode, all mechanical transmission elements are eliminated, and it has quick response ,high dynamic stiffness and position precision.According to requirement of zero mechanical transmission experimental table, this text taking “NC+PC” openning architecture, IPC was used as its supervisory to process weak real-time tasks in CNC, and PMAC motion control card was used as the control of CNC to process strong real-time tasks. stage.The whole system PID parameters had been adjusted on—line using the PID executive program provided by PMAC,optimized the dynamic performance of the system. The setting accuracy and the resetting accuracy of the Torque Motor had been determined by RENISHAW laser interferometer. system,and then the setting error compensation on-line had been realized by compiling the error compensation program.Through the debug and detection of the motor, the performance index of it has fulfilled the designing requirement.Key words: Torque Motor, PMAC, RENISHAW laser interferometer目录第1章.绪论 (1)1.1. 课题研究的目的及意义 (1)1.2. 力矩电机的研究状况及发展趋势 (2)1.3. 国内外超精密数控系统中应用PMAC概况 (4)1.4. 开放式数控系统 (6)1.5. 论文的主要内容与任务 (7)第2章.伺服驱动单元 (9)2.1. 力矩电机 (9)2.1.1. 力矩电机的主要特点及应用 (9)2.1.2. KOLLMORGEN力矩电机D063M (10)2.2. 伺服驱动器 (11)2.2.1. 驱动器的主要端口 (12)2.2.2. 编码器的引脚及意义 (13)2.2.3. 正弦编码器的反馈 (15)2.3. 本章总结 (15)第3章.PMAC运动控制卡 (16)3.1. PMAC运动控制卡的概述 (16)3.2. PMAC运动控制卡的功能简介 (16)3.3. PMAC运动控制卡的开放性 (18)3.4. PMAC运动控制卡的应用 (19)3.5. 本章总结 (19)第4章.控制系统设计 (20)4.1. 控制系统的组成与分类 (20)4.1.1. 运动控制系统的组成 (20)4.1.2. 运动控制系统的分类 (21)4.2. 运动控制系统的电路设计 (22)4.2.1. 系统连线 (24)4.2.2. 系统的电气控制 (29)4.3. 运动控制系统的调试 (29)4.3.1. I变量的设置 (29)4.3.2. 驱动器参数的设置 (32)4.3.3. 电机PID参数的设定及调节 (33)4.4. 系统安全 (37)4.4.1. 硬件超程限位开关 (38)4.4.2. 软件超程限位 (38)4.4.3. 跟随误差限制 (38)4.4.4. 屏蔽技术 (38)4.4.5. 光电隔离 (39)4.5. 本章总结 (39)第5章.系统精度检测实验 (40)5.1. RENISHAW激光干涉仪的测量原理 (40)5.2. 精度测量结果分析 (41)5.2.1. 基于PMAC的误差补偿功能 (41)5.2.2. 测量结果分析 (42)5.3. 本章小结 (44)第6章.结论及展望 (45)6.1. 结论 (45)6.2. 展望 (45)参考文献 (47)致谢 (50)第1章.绪论1.1.课题研究的目的及意义目前多轴联动数控机床的发展水平已经成为衡量一个国家制造装备业水平的重要标志,国外发达国家已把数控转台直接驱动多轴联动数控机床作为新一代产品的主流发展方向之一,并正在积极研制和开发。
acs直线电机运动控制卡函数库
尊敬的读者,今天我要和你共享的主题是“acs直线电机运动控制卡函数库”。
在本文中,我将深入探讨这一主题,并为你提供全面的评估和理解。
1. 什么是acs直线电机?acs直线电机,全称为“交流伺服直线电机”,是一种利用三相交流电源作为动力源并具有闭环反馈控制功能的直线运动设备。
相比于传统的直线执行器,acs直线电机具有更高的精度、更快的响应速度和更强的负载能力。
2. 运动控制卡的作用是什么?运动控制卡是控制acs直线电机的关键装置,它主要用于接收主控系统发送的指令信号,并将其转化为电机可以识别和执行的控制信号。
运动控制卡不仅能够实现对电机的速度、位置和力的精确控制,还可以通过多种算法保证系统的稳定性和安全性。
3. 函数库在acs直线电机运动控制卡中的作用和意义在acs直线电机运动控制卡中,函数库是运动控制系统中的“大脑”,它集成了大量的算法和控制策略,可以极大地简化系统开发过程,并提高系统的性能和灵活性。
不同的函数库可以实现不同的功能,比如位置闭环控制、速度控制、力控制等,满足不同应用场景的需求。
4. 以从简到繁的方式理解acs直线电机运动控制卡函数库让我们从最基础的控制功能开始理解。
在acs直线电机运动控制卡中,最基本的函数库是位置控制函数库。
它能够实现对电机位置的精确控制,保证系统能够按照预定的路径和速度进行运动。
我们可以深入了解速度控制函数库。
速度控制函数库可以根据系统的实际运行情况动态调整电机的输出速度,保证系统能够在不同负载和工况下保持稳定的运行状态。
让我们来探讨力控制函数库的意义和作用。
力控制函数库可以根据外部的力信号对电机输出的力进行实时调整,保证系统能够在外部干扰下保持稳定的运行状态,从而提高系统的安全性和可靠性。
5. 我的个人观点和理解在我看来,acs直线电机运动控制卡函数库是现代工业自动化系统中不可或缺的一部分。
它不仅极大地简化了系统的开发和维护工作,还提高了系统的性能和灵活性,为工业生产带来了巨大的便利和效益。
运动控制新技术探析

动 效 率 大 大 提高 。
在一 些定位精 度或 动态响应要求 比较高的机电一体化产品中, 交流 伺服 系统 的应用越来越广 泛, 中数字式交 流伺服系统更 符合数 字化控 其 制模式 的潮 流, 而且调试 、 使用十分简单, 因而倍 受青睐 。这种伺服 系统 的驱动器采 用了先进 的数 字信号处理器(i t i aPoes , S ) D g  ̄S nl rcs rD P, g o 可 以对 电机轴后端部 的光 电编码器进行位 置采 样, 在驱动器和电机 之间构 成位 置和速度的闭环控 制系统, 并充分发 挥 D P的高速运算 能力, S 自动 完 成整个伺 服系统的增 益调 节, 至可以跟踪 负载变化 , 时调节 系统 甚 实 增益 ; 的驱动器还具有快 速傅立叶变换 ( T 的功能, 出设备 的机 有 F ) F 测算 械共振点 , 并通过 陷波滤 波方式 消除机 械共 振。 般情 况下 , 这种数 字式交 流伺 服系统 大多工作 在半闭环的控制方 式, 即伺服 电机上 的编码器反馈 既作速度环 , 也作位 置环 。 这种控制方式 对 于传动链上 的间隙及误 差不能克服或补偿 。为了获得更高 的控 制精 度, 应在最终 的运动部分安 装高精 度的检测 元件 ( 光 栅尺 、 如: 光电编码 器等) , 即实现 全 闭环控 制。 比较传统的全 闭环 控制方法是 : 伺服系统 只 接受 速度指令 , 完成速度环 的控制, 位置环 的控 制 由上位控 制器来完成 ( 多数全 闭环的机床数 控系统 就是这 样) 这样大大增加 了上位控制器 大 。 的难度, 限制 了伺服 系统 的推广。 目前, 也 国外 已出现了一种更完善 、 可 以实 现更 高精度 的全 闭环数 字式伺服系统 , 得高精度 自动化设备 的 使 实现更为容 易。 该系统克服 了上述半 闭环控制系统 的缺 陷, 驱动器 可以直接采 伺服 样装 在最后一级 机械运动部 件上 的位置反 馈元件 ( 如光栅 尺 、 栅尺 、 磁 旋转 编码 器等)作为位 置环 , , 而电机上 的编码 器反馈 此时仅作 为速度 环 。这样伺 服系统就可 以消除机械传动上存在 的间隙( 如齿轮 间隙 、 丝 杠 间隙等) , 机械传动件 的制造 误差( 补偿 如丝杠 螺距误差 等) , 实现真正 的全闭环位置控制功能, 获得较高的定位精度 。而且这种全 闭环控制均 由伺 服驱动器来 完成, 无需增 加上位控制 器的负 担, 因而越来越 多的行 业在其 自动化设备 的改造 和研制 中开始采用这种伺服 系统 。
ACS技术简介

力帆520ACS 力帆520ACS
力帆520ACS安装示意图 ①安装在变速器上的离合器 操纵机构(拉索式) ②安装在车身悬架上的电控 单元 ③安装在换档拉杆上的换档 力传感器及安装在变速器 上的档位传感器
① ②
宏泰伟业
③ ② ① ③
离合器机构
电控单元
档位、 档位、换档力传感器
捷达轿车ACS 捷达轿车ACS
宏泰伟业
拉 索 式 机 构
ACS离合器操纵机构 ACS离合器操纵机构
宏泰伟业
拉索式机构剖面图
液压式机构剖面图
ACS离合器操纵机构 ACS离合器操纵机构
离合器拉索 助力弹簧 行程传感器 定位导向
宏泰伟业
电动机
自调装置
组合螺杆
组合螺母
平面推力轴承
离合器操纵机构传动路径:电动机拖动驱动组合螺杆旋转→定位导向辅助组合螺母将组合螺杆的 旋转运动转换为直线运动→组合螺母带动自调装置运动→自调装置拉动离合器拉索实现离合器 分离结合动作。
ACS系统简介 ACS系统简介
ACS构成 ACS构成
显示、报警单元 采集变速箱 档位位置 档位显示、故障 显示及报警、误 操作蜂鸣提示
宏泰伟业
档位传感器
采集原车转速、车速、 节气门、制动信号
ACS
电控单元 换档力传感器
ACS控制核心部件, 收集各传感器数据 进行综合运算输出 控制离合器 离合器操纵机构 总成,用于执行 电控单元对离合 器的控制
ACS电控单元软件框图 ACS电控单元软件框图
初始化模块 控制参数初始化读取 各软硬件模块初始化 设置
调用执行 中断执行
宏泰伟业
通讯模块(中断) 系统主流程 软件系统主控部 分,支配各功能 模块协调工作 同外部故障诊断系 统通讯,同外部显 示单元通讯
VAMCO伺服直驱模具大回转及模具控制系统如何达到世界最高的速度与精度?

VAMCO伺服直驱模具大回转及模具控制系统如何达到世界最高的速度与精度?伺服驱动是一门包含着丰富内容的综合性技术。
它的发展离不开电力电子技术、大功率驱动技术、电机制造技术、计算机控制技术和控制理论学科的发展。
伴随各项技术的发展和完善,伺服驱动控制的研究也在不断深入,其应用领域日益广泛。
坚实的发展基础:VAMCO公司综合实力十分雄厚,目前在VAMCO公司的生产线中,可更换齿轮送料机超过3000台、可调节凸轮送料机大约623台、传统单伺服送料机大约829台、Quantum系列伺服送料机大约1850台、SR系列伺服进给大约991台,总计已经超过9239台,生产能力十分强大。
VAMCO公司致力于市场开拓,目前VAMCO公司所服务的市场十分广泛,主要有电机铁芯、电气连接器、铅酸蓄电池格栅、硬币、汽车正时链条、滚针轴承部件、引线框架等等,这对于VAMCO公司的发展而言,有着强大助力,也是VAMCO 机械(上海)有限公司一直保持不断前进的基础所在。
VAMCO公司在基础设备以及专业技术方面,也实力雄厚,在应用工程方面,专有运动控制系统设计;其中在机器设计和制造方面,还有专门的软件和硬件的嵌入式系统。
高超的生产技术:目前VAMCO公司凭借着自身强大的实力,雄厚的基础,高质量的生产线,科学的投资组合,获得了大量的投资支持。
目前已经VAMCO公司有Quantum ACS系列高速伺服送料&自动化系统、SR系列高速重载伺服辊式送料系统、Quantum SG 系列高速伺服夹持式送料系统。
Quantum ACS(高级控制系统):其中有全集成自动化控制平台、专有多轴运动控制(20 Max),生产速度高达2500 SPM,在该系统已经实现了智能自动化模具控制功能,还具有高级模具保护功能。
目前已经实现了全智能控制,在该智能化系统中,Quantum HMI上可以持续显示电机扭矩,还可以自动生成良好送料特征的公差带,如果超出公差带就表示模具中存在送料障碍,同时还能将原料拉回到“安全”位置,并立即停止压机。
国外十大变频器

变频器国外十大品牌排名如下:1、西门子【西门子(中国)有限公司】2、ABB【ABB(中国)有限公司】3、三垦力达【三垦力达电气(江阴)有限公司】4、施耐德【施耐德电气(中国)投资有限公司】5、爱默生【艾默生网络能源有限公司】6、三菱【三菱电机自动化(中国)有限公司】7、富士电机【富士电机(上海)有限公司】8、博世力士乐【博世力士乐电子传动与控制(深圳)有限公司】9、欧姆龙【欧姆龙自动化(中国)有限公司】10、艾伦-布拉德利(A-B)【罗克韦尔自动化有限公司】1.西门子变频器西门子股份公司(SIEMENS AG FWB:SIE, NYSE:SI)是世界最大的机电类公司之一,1847年由维尔纳·冯·西门子建立。
如今,它的国际总部位于德国慕尼黑。
西门子股份公司是在法兰克福证券交易所和纽约证券交易所上市的公司。
2005年,西门子全集团在190个国家和地区雇用员工460,800人,全球收入为754.45亿欧元(2004年为702.37亿欧元),税后利润较2004年的36.6亿欧元降至24.2亿欧元。
特点:西门子变频器也可分为通用型变频器和工程型变频器。
MicroMaster410 紧凑型变频器它小巧、灵活、安装简单、使用方便。
是小功率紧凑型应用的理想选择。
MicroMaster420 基本型变频器全新一代模块化设计的多功能标准变频器。
用户界面有好,安装、操作和控制灵活方便。
它有着全新的IGBT技术、强大的通讯能力、精确的控制性能、和高可靠性。
MicroMaster440 矢量型变频器MicroMaster440是全新一代可以广泛应用的多功能标准变频器。
它采用高性能的矢量控制技术,提供低速高转矩输出和良好的动态特性,同时具备超强的过载能力,以满足广泛的应用场合。
创新的BiCo(内部功能互联)功能有无可比拟的灵活性。
工程型变频器SIMOVERT MASTERDRIVES一贯地共同遵守相同的设计原则。
ACS运动控制高级算法介绍(ServoBoost和Motionboost)
ACS运动控制高级算法介绍(ServoBoost和Motionboost)随着工业自动化和智能化的不断发展,对于动态性能和高效能的要求也在不断提高。
作为工业自动化的重要部分,运动控制系统的性能也越来越受到关注。
ACS (Automation Control System)作为欧洲一家领先的运动控制系统供应商,推出了ServoBoost和Motionboost两个高级算法,通过强大的算法实现运动控制系统的高效能、稳定性以及动态性能。
ServoBoostServoBoost算法是ACS推出的一种特殊的控制算法,该算法能够实现稳定的运动控制并具有优异的动态性能。
与传统的PID控制算法不同的是,ServoBoost算法利用电流反馈,对电机作出更为精确的控制。
ServoBoost算法与传统的PID控制算法相比,在控制精度、响应速度和动态性能上有了突破性的提升。
且可以同时控制多个轴,具有更强的灵活性。
MotionboostMotionBoost是ACS推出的一种独特的运动控制算法,旨在使运动过程更加流畅和高效。
该算法通过减少运动中的振动和来回摆动,提高了运动的质量和速度。
Motionboost是基于预测控制算法开发的,将预测数据与实际数据进行比较,减少了机械振动和过渡时间。
Motionboost算法的应用范围较为广泛,主要应用于自动化生产线、石油化工、食品饮料、机床加工等行业中。
ACS运动控制系统的优势ACS运动控制系统集成了ServoBoost和Motionboost两个高级算法,具有以下优势:高效能ACS运动控制系统的高级算法可以实现稳定的运动控制和高效能的动态响应。
通过电流反馈控制方式,提高了电机的利用率和能效,并且能够同时控制多个轴,大大提高了运动控制系统的应用灵活性。
稳定性ACS运动控制系统的高级算法可以通过对电机的超前控制,有效降低了控制系统的谐波振动和失速风险。
算法不仅能够实现贴合性好、精度高、最终速度稳定、且响应快,而且能够稳定的控制在低速和高负载情况下的工作效率。
ACSM 产品介绍

齐立健, TPMABB高性能机械传动ACSM1 产品介绍© ABB Group March 7, 2012 | Slide 1ABB高性能机械传动 ACSM1硬件介绍 高性能 驱动同步和感应电动机 强大的反馈接口 模块化紧凑设计 自定义编程 存储单元,方便维护 安全标准© ABB Group March 7, 2012 | Slide 2型号和额定值 (1/3)© ABB Group March 7, 2012 | Slide 3模块型号 电流和功率额定电流 最大电流 电机功率 制动斩波器 制动电阻 输入电抗器 滤波器 (EMC)ABCDE• 标准的2,5…7,0A 5,3…14,7A9,5…16A 16,6…28 A24…46A 42…80A0,75…3 kW•4…7,5 kW•11…22 kW*•60…90A 110…210A 105…150A 165…326A30…45 kW*•55…110 kW**• 外部可选 件有进线电*抗器可选 件水冷单元 ** 最大到160KW••型号和额定值(2/3)© ABB Group March 7, 2012 | Slide 4模块特征 安装和冷却 可拆卸散热器 空冷 - 壁挂安装 - 导轨安装 可拆卸的电机线端子 可拆卸的控制线端子模块 A B C D E高度 (mm) 364 380 467 467 700宽度(mm) 90 100 165 220 314ABCDE说明:–– ■■ –■ ■ ■ ■ ■ • 标准的 ● ● ●●●●●–––●●––■ 可选件 –● ● ●●●厚度 (mm) * 146 223 225 225 398重量 (kg) * 3 5 10 17 64* 没有可选件型号和额定值(3/3)© ABB Group March 7, 2012 | Slide 5ACSM1-04xxFrame A A A A A B B B C C C C D D D E E E EType -02A5-4 -03A0-4 -04A0-4 -05A0-4 -07A0-4 -09A5-4 -012A-4 -016A-4 -024A-4 -031A-4 -040A-4 -046A-4 -060A-4 -073A-4 -090A-4 -110A-4 -135A-4 -175A-4 -210A-4I2NPnPnI2maxI2cont4k I2cont8k I2cont16k4kHz8kHz16kHzAkWHpAAAA2.50.7515.332.52.031.11.56.33.632.241.528.44.842.452.2310.5652.573.0314.785.53.09.54516.610.59.55.0125.57.52114126.0167.510.02818137.524111542272418311520543531204018.525.070443522462230805038246030401056555287337501288060319045601509365341105575165tbdtbd-13575100202tbdtbd-17590125282tbdtbd-210110150326tbdtbd-运行条件 ACSM1 是为装柜 安装设计 的工作条件 防护等级 环境温度 海拔 相对湿度 气候环境条件IP20 acc. to EN 60529; Open Type acc. to UL 508. -10…+55°C, 40°C以上降容使用 0….4000m, 1000m以上降容使用 最大 95% Class 3K3, 3C2 acc. to EN 60721-3-3.震动EMC (满足 EN61800-3)Class 3M4 acc. to EN 60721-3-3噪声干扰 - 标准: 无滤波器 - 有滤波器: C2类别安全端子 认证安全转矩切断功能 (STO acc. Draft EN 61800-5-2). 设计符合(SIL 3) acc. to IEC 61508 and Safety Category 3 acc. to EN 954-1CE, UL, cUL, CSA, C-Tick© ABB Group March 7, 2012 | Slide 6动力线连接 (1/2)2 1 1. 交流进线供电电压3相 380-480V +10 /- 15%频率50…60Hz +/- 5%总谐波含量(THD)选择外部进线电抗器可满足EN61000-3-2, Draft IEC61000-3-12, IEC 61000-3-42. DC 连接 DC 电压等级范围: 436…712 VDC充电内部进行© ABB Group March 7, 2012 | Slide 7动力线连接 (2/2)3. 电机接线 电机类型输出频率 开关频率 4. 制动单元连接 制动斩波器异步电机 (标准感应电机, 伺服电机) 同步电机 (伺服, 高转矩) 0…500Hz 1…16kHz, 默认值为4kHz. 在4kHz以上降容使用所有型号内置制动电阻34© ABB Group March 7, 2012 | Slide 8外部连接控制板接口24 6 8© ABB Group March 7, 2012 | Slide 91 3 5 7 9控制接口1. 状态显示 2. 控制电源供电7段数码管显示主要状态和 故障信息内部或外部输入24VDC供 电给控制单元3. 数字 I/O6xDI, 3xDI/O, 1xRO4. 模拟 I/O2xAI, 2xAO5. 热继电器输入电机传感器 (PTC, KTY)6. 传动到传动 (D2D) 通过RS-485连接使传动间 通讯7. 安全转矩切断 (STO)设计为安全考虑 (SIL 3) 符 合IEC 615088. 用户接口 (HMI) 9. 存储单元 (MU)PC工具和控制盘连接完整的传动设置和程序都存 储在存储单元中ACSM1 安全转矩切断接口STO 接口安全转矩开 关 (STO)• SIL 3 / IEC 61508, • SILCL 3 / EN 62061 • Category 4 / EN 954-1 • PL e / EN 13849-1STO© ABB Group March 7, 2012 | Slide 10控制 & 通讯可选件1 2 3© ABB Group March 7, 2012 | Slide 11可选件数据模拟 & 数字扩展模块FIO-014xDI/O, 2xROFIO-113xAI, 1xAO, 2xDO反馈接口模块FEN-012路 输入 (TTL增量式编码器), 1路输出FEN-112 路输入 (SinCos 绝对值型, TTL 增量型编码器), 1 路输出FEN-21FEN-31 通讯模块2路输入(TTL增量,旋 变),1路输出1路HTL编码器输入, 1 路输 出FPBA-01 PROFIBUSFCAN-01 CANopenFDNA-01 DeviceNetFENA-01 FSCA-01Ethernet/IP, Modbus/TCP MODBUS安装 Slot 1 or 2Slot 1 or 2Slot 3外部可选件灵活连接多种外部可选电抗器 减少输入电流的谐波含量 降低主电源低频干扰 提高直流电源功率制动电阻 吸收发电状态下的电动 机的能量 适用于多种负载 标准内置滤波器 (EMC) 符合 C2 级别的标准 (最大 50m电缆).© ABB Group March 7, 2012 | Slide 12EMC 通用标准EN 61800-3/A11 (2000), 产品标准EN 61800-3 (2004), 产品标准第一环境,非限 制性销售第一环境,限制 性销售第二环境,非限 制性销售第二环境,限制 性销售Category C1 Category C2 Category C3 Category C4EN 55011,product family standard for industrial, scientific and medical (ISM) equipmentGroup 1, Class BGroup 1, Class AGroup 2, Class A不适用ACSM1-204 能量回馈单元 ACSM1 再生供电可用于单传动和多传动配置 再生供电模块有四个外形尺寸,功率范围为5 至 60 kW© ABB Group March 7, 2012 | Slide 13ACSM1-204 能量回馈单元 亮点• 全制动功率 (100%额定功率) • 网侧功率因数控制为 1 • 具有低谐波电流 (THD < 5%) 和集成EMC滤波( C2类)的清洁动力 • 由于受控直流电压的原因,可抑制供电电压的波动 • 连线即运行。
:ACS运动控制
研拓自动化
Firmware - SP程序 程序
编码器反馈值处理 给定值精插补 位置环控制算法 速度环控制算法 电流环控制算法
研拓自动化
应用程序开发
研拓自动化
ACSPL+开发环境 开发环境
研拓自动化
ACSPL+基本特性 基本特性
高级语言, 高级语言,拥有丰富的指令集 强大的运动控制指令 64位浮点运算,丰富的数学函数 位浮点运算, 位浮点运算 复杂的数学表达式 多任务: 个程序区 可以10个程序同时运行 个程序区, 多任务:10个程序区,可以 个程序同时运行 编译执行,类似于 编译执行,类似于C++ 执行时间确定:每个MPU周期执行 周期执行1~10行 执行时间确定:每个 周期执行 行 每行程序可以包含多个语句 自动执行子程序(Autoroutine) 自动执行子程序 大容量: 大容量:128Mb RAM, 128Mb Flash 支持一维和二维数组,数组最大容量为10万 支持一维和二维数组,数组最大容量为 万 支持全局变量, 支持全局变量,每个程序都可访问
研拓自动化
MPU SPii
研拓自动化
统一的软件平台:SPiiPlus ADK 统一的软件平台:
SPiiPlus MMI SPiiPlus Simulator SPiiPlus FRF SPiiPlus Library PLCopen 文档 课件与例程
研拓自动化
人机接口软件 – SPiiPlus MMI
研拓自动化
Q&A
研拓自动化
Thanks!
研拓自动化
�
SIN-COS编码器细分器
– –
65536倍 16位分辨率 位分辨率, 4 ~ 65536倍,16位分辨率,2.5MHz 可达到亚纳秒级的分辨率
ABB通用型传动ACS530-04产品样本说明书

—低压交流传动ABB通用型传动ACS530-04 R10-R11, 250 kW 至 500 kW2ABB通用型传动 | ACS530-04产品样本—ACS530-04通用型传动专为柜体安装而设计。
3—目录04 ABB通用型传动ACS530-04系列06 易用而可靠08 典型应用09 标准接口和插件扩展连接10 欧盟生态设计法规11 技术数据外形尺寸12 如何选购变频器13 额定值、型号和电压14 控制盘可选件15 基本控制盘柜门开孔尺寸16 附加可选件17 连接可选件18 内装可选件冷却和熔断器19 du/dt滤波器20 断路器21 ABB Ability™智能手机应用22 ABB运动控制服务为您的业务增长保驾护航24 在整个生命周期确保变频器的性能始终处于稳定状态4ABB通用型传动 | ACS530-04产品样本—ABB通用型传动ACS530-04系列简单易用,可靠之选ACS530-04传动模块是ABB全兼容型传动产品组合的一员,是针对柜体安装而优化设计的产品。
其结构紧凑合理,选型、安装、调试和维护方便快捷,是系统集成商、盘柜厂商和OEM用于柜体安装的理想之选。
食品饮料纺织制浆造纸简单易用传动具有多种内置功能如交流电抗器、可选EMC滤波器、STO等,简化了传动的选型、安装及使用。
标配图形化界面控制盘,可快速有效的配置传动。
集成PID、PFC及SPFC等多种控制宏,有效降低调试工程师的工作量。
服务完备ABB有完善且系统的响应服务,能针对客户的需求快速做出反应。
多中心仓库发货,节省物流时间。
7*24全天候全球服务网络和标准的质保政策,免除您购买ABB变频器的后顾之忧。
具有可扩展性ACS530-04和ABB其他全兼容型传动具有统一的选型规则和选型工具,并具有相同的、易于使用的PC工具和相似、直观的多语言用户界面和参数结构,统一的安装尺寸、统一的调试风格和统一的接口和可选件。
产品自身功能可持续优化和升级,更好的满足客户需求。
双角度编码器超精密转台测角误差校准
双角度编码器超精密转台测角误差校准焦扬; 黄明; 刘品宽; 李梦阳; 秦代成【期刊名称】《《光学精密工程》》【年(卷),期】2019(027)010【总页数】12页(P2180-2191)【关键词】精密转台; 角度编码器; 分度误差; 细分误差; 角度校准【作者】焦扬; 黄明; 刘品宽; 李梦阳; 秦代成【作者单位】上海交通大学机械与动力工程学院上海200240; 中国工程物理研究院机械制造工艺研究所四川绵阳621900【正文语种】中文【中图分类】TB922; TH7121 引言精密转台是精密工程领域中用于角度测量的关键装置,被广泛应用于超精密机床、精密定位系统等高端装备中。
近年来,微纳米技术和精密工程的发展对测角转台的性能指标提出更高要求,集成多种关键技术的高精度新型转台已成为研究热点[1]。
精密转台的角度测量精度受编码器刻线误差、安装精度、主轴误差运动以及环境条件等多种因素的影响。
对转台测角误差进行校准是评估并提升转台精度的重要措施。
以角度编码器为核心部件的转台可以同时具备测量范围大、高分辨率、高精度等特点。
多国计量院研发了代表该国最先进测角水平的超精密转台,并将其用作国家角度计量基标准装置。
德国联邦物理技术研究院(PTB)的角度基准WMT 220,是目前世界上精度最高的计量转台。
该转台以气浮轴承为支承,以布置有16个读数头(8个测量读数头、8个校准读数头)的高精度增量式编码器为位置反馈,可以实现0.01″(k=2)以内的测量不确定度[2]。
此外,日本、韩国、土耳其、意大利等国的角度计量转台在轴系设计、测量方案(单光栅多读数头或多光栅系统)、驱动装置等方面也各具创新之处[3-6]。
我国精密测角转台的研究近几年也取得了一定的成果[7-8],但与国际先进水平相比仍然存在较大差距。
精密转台的测角误差主要包含分度误差和细分误差[9]。
分度误差的主要成分是周期为360°/n(n为正整数)的低频误差。
ACS评估及护理解析

针对患者可能出现的焦虑、抑郁等心理问题,采取适当的心理干预措 施,如心理疏导、认知行为疗法等。
家属支持
鼓励家属积极参与患者的护理工作,提供情感支持和生活照顾,帮助 患者树立战胜疾病的信心。
康复指导
根据患者的具体情况,制定个性化的康复计划,包括饮食调整、运动 锻炼、生活习惯改善等,促进患者康复和生活质量提高。
XX
ACS评估及护理解析
汇报人:XX
2024-01-18
REPORTING
• ACS概述与评估重要性 • ACS评估方法与标准 • 护理在ACS中的作用与挑战 • ACS患者护理实践解析 • ACS并发症预防与处理 • 总结与展望
目录
XX
PART 01
ACS概述与评估重要性
REPORTING
ACS定义及发病原因
保持良好作息
保证充足的睡眠时间,避免熬 夜和过度劳累。
积极治疗原发病
控制高血压、糖尿病等危险因 素,降低ACS发生风险。
适量运动
根据身体状况选择合适的运动 方式,如散步、太极拳等,提 高身体抵抗力。
定期体检
定期进行心电图、心脏彩超等 检查,及时发现并处理潜在问 题。
处理方法及效果评价
心律失常处理
根据心律失常类型选择合适的抗心律 失常药物,如胺碘酮、利多卡因等。 对于严重心律失常患者,可考虑采用 电复律或射频消融术治疗。
参考超声心动图、冠状动脉造 影等影像学检查结果进行评估
。
综合分析
将上述各方面信息进行综合分 析,得出ACS的评估结论。
XX
PART 03
护理在ACS中的作用与挑 战
REPORTING
护理角色与职责
病情监测
密切观察患者病情变化,包括 生命体征、症状等,及时向医
ACS控制器在超精密定位系统中的应用
ACS控制器在超精密定位系统中的应用肖勇,葛晓宇,逄玉俊(沈阳化工大学信息工程学院,辽宁 110142Email: xiaoyong@)摘要:超精密定位系统是现代科技与工业发展的核心技术之一,长期以来受科研及高科技产业迅速发展的推动,对其运动控制技术的需求迅速增长,比如超精密加工,微/纳米制造,包装等。
除需要达到超精密的定位精度外,还要求各运动轴在定位过程中严格按照既定的轨迹协同运动。
本文首先设计了X-Y定位平台。
然后,根据运动控制的需求,采用ACS控制器模块化方案,通过合理的系统配置和调试策略,实现了位置和速度的精确控制,以满足不断发展的多自由度,多约束加工和制造要求,进一步提高生产力,降低制造成本,增强企业的市场竞争力。
关键词:定位系统;ACS控制器;超精密1.引言在现代机械制造中,多轴运动控制已经越来越普遍,用电子方式来实现机械运动轴之间协调同步,取代了传统的机械凸轮和齿轮,给机械设计制造带来了巨大的灵活性,控制精度更高,动态性能更好,没有机械损耗,使维护变得方便而简单[1, 2]。
用户可以实现更加灵活的,模块化的机械结构。
与此同时,超精密运动控制技术是集控制技术,电子技术,数字技术,传感技术,驱动技术,测量技术及精密机械技术于一体的一门综合技术,是现代科技与工业发展的核心技术之一,长期以来受科研及高科技产业迅速发展的推动,对超精密运动控制技术的需求迅速增长。
目前,此技术已经被工业界所采用,比如超精密加工,微/纳米制造,包装等[3-6]。
除了需要达到高精度的跟踪误差外,还要求各轴在运动过程中按照既定的轨迹协同动作,以减少轴间的同步误差,提高系统的运动稳定性[7]。
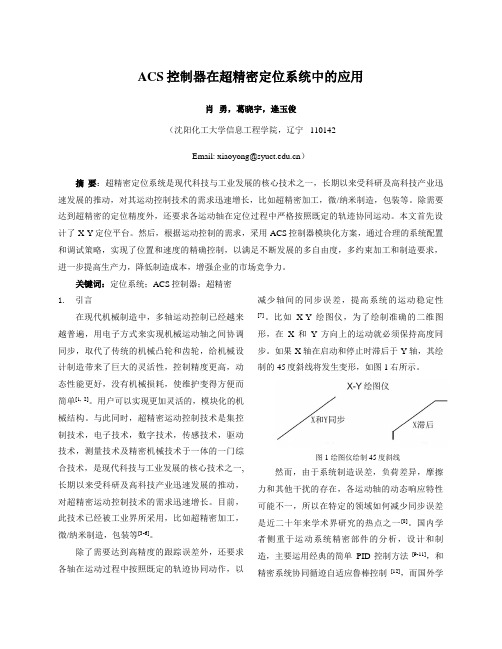
比如X-Y绘图仪,为了绘制准确的二维图形,在X和Y方向上的运动就必须保持高度同步。
如果X轴在启动和停止时滞后于Y轴,其绘制的45度斜线将发生变形,如图1右所示。
图1 绘图仪绘制45度斜线然而,由于系统制造误差,负荷差异,摩擦力和其他干扰的存在,各运动轴的动态响应特性可能不一,所以在特定的领域如何减少同步误差是近二十年来学术界研究的热点之一[8]。
(完整版)运动控制技术

控制器与驱动器结合策略-6
❖ 德国倍福,以色列ACS等公司的EtherCAT产 品。
控制器与驱动器结合策略-6
❖ 丹纳赫公司的SynqNet产品
让电机快速运动起来
❖ 控制器厂商都会提供一个界面友好的运行在 Windows系统的控制器配套软件。
❖ EMAC:Pro-Motion ❖ ACR9000:ACR-View ❖ PMAC:Pewin32PRO ❖ ACS控制器:SPiiPlus Suite
控制器与驱动器结合策略-2
❖ 小知识——控制器预防飞车或失控的策略 ❖ 跟随误差限制:当飞车时,跟随误差会越来
越大,可以在控制器中设置跟随误差限制, 当达到或超过这个限制时,控制器会自动切 断对驱动器的使能信号。电机将停止。 ❖ 在最开始调试时,不要把这个限制设置的过 小,否则电机可能经常被禁能。
致,控制器无法实现负反馈,而是形成了正 反馈,位置误差将越来越大,电机向一个方 向飞速旋转。 ❖ 飞车一般只发生在第1次调试该电机时,当确 定好极性后,就不会再出现飞车现象。
控制器与驱动器结合策略-2
❖ 避免飞车的方法:
❖ 在调试时,先开环调试。以这种策略为例, 首先控制器开环,然后控制器发送1个较小的 速度指令信号给驱动器,电机将运动,再控 制器中监视反馈信号的读数。正确的极性为: 正电压对应反馈读数增加,负电压对应反馈 读数减小。否则,需要更改反馈信号或指令 信号的极性。
冲,就不能实现这种及之后的策略。控制器 必须接收反馈信号。 ❖ 调试较第1种复杂一些,调试时控制器中需要 确定位置环极性,若极性不对,会出现飞车。 ❖ 控制器及驱动器可能都需要调试参数。 ❖ 对屏蔽要求高,控制器与驱动器共地。
控制器与驱动器结合策略-2
❖ 名词解释: ❖ 飞车:当指令信号及反馈信号方向(符号)不一
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
研拓自动化
MPU SPii
研拓自动化
统一的软件平台:SPiiPlus ADK 统一的软件平台:
SPiiPlus MMI SPiiPlus Simulator SPiiPlus FRF SPiiPlus Library PLCopen 文档 课件与例程
研拓自动化
人机接口软件 – SPiiPlus MMI
研拓自动化
SPiiPlus CM
集成了电源和驱动器 研拓自动化
MC4U
用户可配置式控制系统: 控制器,电源, 用户可配置式控制系统: 控制器,电源,驱动器 可配置式控制系统
研拓自动化
HSSI扩展模块 扩展模块
HSSIHSSI-HES HSSIHSSI-IO16 研拓自动化 HSSIHSSI-ED2
C Library
C C++
COM Library
VB LabVIEW
研拓自动化
统一的系统架构:多处理器架构 统一的系统架构:
一个SPii处理器控制两个轴,轴数增加,性能保持不变! 一个SPii处理器控制两个轴,轴数增加,性能保持不变! SPii处理器控制两个轴
研拓自动化
统一的系统架构:多处理器架构 统一的系统架构:
ACS Motion Control
AdvanTofine Automation
研拓自动化
ACS Motion Control
成立时间:1985年 :1985年 产品:高性能多轴运动控制器 : 应用:中高端设备 : 布局
– – –
全球总部:Israel 全球总部: 北美总部: 北美总部:Plymouth, Minnesota 亚洲支持中心: 亚洲支持中心:South Korea
MARK:高速位置捕捉
– –
高速, 高速,高精度 应用场合: 应用场合:包装
研拓自动化
SPii运动控制芯片 运动控制芯片
HSSI:高速同步串行接口
– – – –
扩展接口: ,编码器, 扩展接口:I/O,编码器,驱动 总线速率2.5MHz,刷新速率20KHz,基于 ,刷新速率 总线速率 ,基于RS-485 标准网线( 米 标准网线(20米) 协议简单, 协议简单,客户可自己设计扩展模块
研拓自动化
Q&A
研拓自动化
Thanks!
研拓自动化
SPiiPlus PCI/-LT/-ST
板卡级控制器 – PCI,可独立运行 , 研拓自动化
SPiiPlus-LF
4轴,经济型,小尺寸,支持:PLCopen,CANOpen 经济型,小尺寸,支持:PLCopen,
研拓自动化
SPiiPlus SAR/SAR-LT
研拓自动化
SPiiPlus-LF-CM
研拓自动化
软PLC编程 编程
IEC61131-3:LD,FBD,ST,IL,SFC : , , , , 采用Infoteam OpenPCS 采用 PLCOpen运动控制功能块 运动控制功能块 支持CANOpen 支持
研拓自动化
SPii运动控制芯片 运动控制芯片
研拓自动化
SPii运动控制芯片 运动控制芯片
研拓自动化
SPiiPlus运动控制功能 运动控制功能
8轴均独立,支持8轴联动 轴均独立,支持 轴联动 轴均独立 8轴点对点,JOG,跟随运动 轴点对点, 轴点对点 , 8轴连续直线插补 轴连续直线插补 PVT三次样条插补,S曲线加速 三次样条插补, 曲线加速 三次样条插补 运动中改变位置、速度、 运动中改变位置、速度、加速度 反向运动学和轴变换 主从跟随, 主从跟随,虚拟主轴 电子齿轮, 电子齿轮,电子凸轮 高级龙门控制算法 输入整形控制算法(Input Shaping) 输入整形控制算法
– – – – –
SPiiPlus MMI SPiiPlus Simulator SPiiPlus FRF SPiiPlus Library PLCopen
研拓自动化
Firmware - MPU程序 程序
与SP程序通信 程序通信 运动轨迹生成( 运动轨迹生成(APOS) ) 给定值计算( 给定值计算(RPOS) ) 安全控制 数据采集 硬件位置触发( 硬件位置触发(PEG) ) 硬件位置触发( 硬件位置触发(MARK) ) 主机即时命令执行 任务调度和管理
网址: :
研拓自动化
研拓自动化
研拓自动化
研拓自动化
Gantry Control
研拓自动化
Input Shaping
研拓自动化
Input Shaping
研拓自动化
安装软件:SPiiPlus 6.50 安装软件:
研拓自动化
研拓自动化
研拓自动化
人机接口软件 – SPiiPlus MMI
研拓自动化
仿真器软件 – SPiiPlus Simulator
研拓自动化
频率响应分析软件 – SPiiPlus FRF
研拓自动化
PLC编程软件 – Infoteam OpenPCS 编程软件
研拓自动化
PLC编程软件 – Infoteam OpenPCS 编程软件
研拓自动化
典型系统配置: 典型系统配置:SPiiPlus CM
研拓自动化
通信与扩展
研拓自动化
软件接口与伺服接口
PC
ACS SPiiPlus
SPiiPlus MMI
ACSPL+ program
模拟量 2~8轴 脉冲/方向
Infoteam OpenPCS
PLC program
CANOpen 1 ~ 64轴
SPii T/D
MPU Interaction with host computer
SPii Z/C SPii Y/B SPii X/A
586/Pentium
MPU cycle 0.5, 1, 2 msec
SPii cycle 50µsec
Flash memory
Interaction with real world
SIN-COS编码器细分器
– –
65536倍 16位分辨率 位分辨率, 4 ~ 65536倍,16位分辨率,2.5MHz 可达到亚纳秒级的分辨率
SIN
COS
研拓自动化
系统软件架构
MPU程序:在MPU的Flash中 : 的 中 SP程序:初始化时载入SPii中,包括伺服算法 :初始化时载入 中 软件工具SPiiPlus ADK:安装在 上 软件工具 :安装在PC上
研拓自动化
Firmware - SP程序 程序
编码器反馈值处理 给定值精插补 位置环控制算法 速度环控制算法 电流环控制算法
研拓自动化
应用程序开发
研拓自动化
ACSPL+开发环境 开发环境
研拓自动化
ACSPL+基本特性 基本特性
高级语言, 高级语言,拥有丰富的指令集 强大的运动控制指令 64位浮点运算,丰富的数学函数 位浮点运算, 位浮点运算 复杂的数学表达式 多任务: 个程序区 可以10个程序同时运行 个程序区, 多任务:10个程序区,可以 个程序同时运行 编译执行,类似于 编译执行,类似于C++ 执行时间确定:每个MPU周期执行 周期执行1~10行 执行时间确定:每个 周期执行 行 每行程序可以包含多个语句 自动执行子程序(Autoroutine) 自动执行子程序 大容量: 大容量:128Mb RAM, 128Mb Flash 支持一维和二维数组,数组最大容量为10万 支持一维和二维数组,数组最大容量为 万 支持全局变量, 支持全局变量,每个程序都可访问
60MHz数字编码器接口 数字编码器接口 16位模拟量驱动输出 位模拟量驱动输出 脉冲/方向信号输出 脉冲 方向信号输出 PEG MARK HSSI SIN-COS编码器细分器 编码器细分器
研拓自动化
SPii运动控制芯片 运动控制芯片
PEG:高速脉冲触发
– – –
高速, 高速,输出触发延时为亚微妙级 脉冲的编码器下精度达到± 个脉冲 在5MHz脉冲的编码器下精度达到±1个脉冲 脉冲的编码器下精度达到 应用场合:激光切割,打印, 应用场合:激光切割,打印,成像