电涡流位移传感器设计
电涡流传感器(位移)
Your company slogan
1 电涡流式传感器原理
电涡流探头结构
1—电涡流线圈 2—探头壳体 3—壳体上的位置调节螺纹 4—印制线路 板 5—夹持螺母 6—电源指示灯 7—阈值指示灯 8—输出屏蔽电缆线 9—电缆插头
Your company slogan
2 电涡流传感器测量电路
电桥测量电路 在进行测量时,由于传感器线圈的阻抗发生变化,使电桥 失去平衡,将电桥不平衡造成的输出信号进行放大并检波, 就可得到与被测量成正比的输出。 谐振法 谐振法主要有调幅式电路和调频式电路两种基本形式。调 幅式由于采用了石英晶体振荡器,因此稳定性较高,而调 频式结构简单,便于遥测和数字显示。
Your company slogan
Your company slogan
1 电涡流式传感器原理
高频反射电涡流传感器等效电路
R
M
R
1
U
·
1
I
·
1
I
L
1
·
2
L
2
Z1=R+jωL1 RI1+jωL1I1-jωMI2=U1 -jωMI1+R1I2+jωL2I2=0
Your company slogan
1 电涡流式传感器原理
传感器线圈的等效阻抗
Your company slogan
1 电涡流式传感器原理
电涡流传感器分类 涡流传感器在金属体上产生的电涡流, 涡流传感器在金属体上产生的电涡流,其渗透深度从传感器线圈自身 原因来讲主要与励磁电流的频率有关, 原因来讲主要与励磁电流的频率有关,所以涡流传感器主要可分高频 反射的低频投射两类。 反射的低频投射两类。
电涡 传感 (
电涡流式位移传感器实验报告

电涡流式位移传感器实验报告电涡流式位移传感器是一种能够测量目标物体相对于传感器的位移的设备。
它利用了电涡流效应,通过感应电磁场的变化来获取目标物体的位移信息。
电涡流效应是指当导体材料处于变化的磁场中时,会产生涡流。
这种涡流会导致导体内部的能量损耗,并产生一个反向的电磁场。
根据这个原理,电涡流式位移传感器通过测量涡流的大小和方向来确定目标物体的位移情况。
电涡流式位移传感器由传感器头和信号处理电路组成。
传感器头通常由导体线圈制成,将其安装在测量物体附近。
当目标物体发生位移时,导体线圈中的磁场也会发生变化,从而引起涡流的产生。
信号处理电路会对涡流信号进行采集和处理,最终输出位移的数值。
电涡流式位移传感器具有许多优点。
首先,它可以实时、精确地测量目标物体的位移,具有很高的测量精度。
其次,它不需要与测量目标物体直接接触,可以在非接触的情况下进行测量,避免了由于接触导致的误差和磨损。
此外,电涡流式位移传感器还具有响应速度快、抗干扰能力强等特点。
在实际应用中,电涡流式位移传感器被广泛应用于各种领域。
例如,在机械制造行业中,它可以用于测量机械零件的位移和变形,以确保机械设备的正常运行。
在航空航天领域,电涡流式位移传感器可以用于测量飞机结构的变形情况,以保证飞机的安全。
此外,它还可以应用于汽车制造、电子设备、医疗器械等领域。
然而,电涡流式位移传感器也存在一些局限性。
首先,它对目标物体的材料有一定的要求,只有导电性较好的材料才能产生涡流效应。
其次,传感器的测量范围相对较小,对于大范围的位移测量可能不适用。
此外,电涡流式位移传感器的成本较高,不适合用于一些低成本的应用场景。
电涡流式位移传感器是一种能够实时、精确地测量目标物体位移的设备。
它通过利用电涡流效应来感应目标物体的位移,并将其转化为电信号输出。
电涡流式位移传感器在各个领域有着广泛的应用,但也存在一些局限性。
随着科技的不断进步,电涡流式位移传感器将会得到更广泛的应用和发展。
电涡流传感器的仿真与设计

电涡流传感器的仿真与设计电涡流传感器是一种基于电磁感应原理的传感器,具有非接触、高精度、高灵敏度等优点,因此在工业、科研、医疗等领域得到广泛应用。
本文将介绍电涡流传感器的仿真与设计,包括其原理、应用和未来发展。
电涡流传感器的工作原理是利用电磁感应原理,当一个导体置于变化的磁场中时,导体内部会产生感应电流,这种电流被称为电涡流。
电涡流的大小和方向取决于磁场的变化,因此,通过测量磁场的变化,可以推导出被测物体的位置、速度、尺寸等参数。
在进行电涡流传感器的设计和应用之前,通常需要进行仿真和验证。
本文将介绍如何使用仿真工具进行电涡流传感器的设计和验证。
需要搭建一个包含激励源、传感器和数据采集器的电路。
激励源用于产生磁场,传感器用于感测磁场的变化,数据采集器用于采集传感器的输出信号。
激励电源的配置应根据传感器的工作频率、功率和电压等参数进行选择。
通常,激励电源的频率与传感器的谐振频率一致,以获得最佳的测量效果。
将传感器与数据采集器连接,使得传感器能够感测到磁场的变化并将输出信号传输给数据采集器。
数据采集器应选择具有较高灵敏度和分辨率的型号,以保证测量结果的准确性。
运行仿真程序并分析仿真结果,以验证设计的可行性和有效性。
可以通过调整激励电源的参数、传感器的位置和方向等来优化仿真结果,并分析各种情况下传感器的响应特性和测量误差。
在完成仿真后,可以开始进行电涡流传感器的硬件和软件设计。
电路设计应考虑传感器的供电、信号的放大和滤波、抗干扰措施等因素。
可以根据仿真结果来选择合适的元件和电路拓扑结构,以满足传感器在不同情况下的性能要求。
根据应用场景的不同,选择合适的传感器类型和材料。
例如,对于高温环境,应选择能够在高温下正常工作的传感器;对于需要测量非金属材料的场景,可以选择使用高频激励源来减小对非金属材料的感测误差。
根据电路设计和传感器选择的结果,编写数据采集器的程序。
程序中应包括信号的读取、处理、存储和传输等功能,以便将传感器的输出信号转换为有用的测量结果。
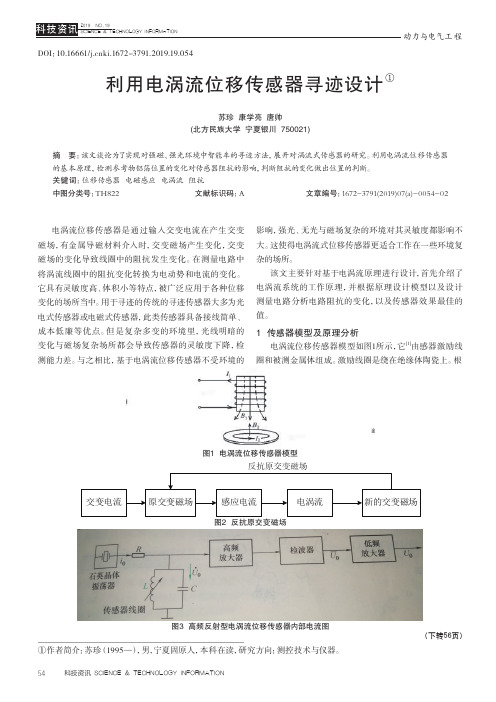
利用电涡流位移传感器寻迹设计
病害,切削突出的部位,对其进行涂刷沥青,再填补上沥青 的 混 合 碎 石原 料,而 对于 基 层 水 稳 定 性 能 不好 的 沥 青路 面,需要利用基层部位的下沉优先处理沥青的基层。
3 结语 对于城 乡沥 青公路 病 害出现的原因正确认识,有助于
促进城乡沥青公路的维护与修补,需要提升城乡沥青公路 的设计质量,从源头上解决和根除公路病害。其次,做好沥 青公路的养护管理,结合城乡沥青公路的使用周期和投资 收益,紧抓路面的专项处治和日常的修补,才能够有针对性 和有依据安排路面的养护,还需要加大对路面技术的创新 和科技投入,为城乡沥青公路的维护提供科技支撑。
对于沥青路面的基层完好,而有坑槽的沥青路面需要 进行面层和基层的共同维护,但需要避开在低温寒冷的季 节或者阴雨较多的季节进行维护,对于缺少合适材料对坑 槽的维护时,需要缩小坑槽面积的扩大可能,及时采取临时 性的措施对坑槽进行处理,利用天气适中的时间,对沥青 公路的坑槽部位进行修补,既要从季节考虑,又要从日常的 天气考虑,针对坑槽的不同情况,因地适宜地进行维修。 2.4 沥青路面车辙的维修方法
222. [4] 裴志华.高速公路交通安全设施现状及养护发展方向
[J].河南建材,2019(2):274-275.
(上接54页) 据电磁感应定律,当传感器励磁线圈中通以正弦交变电流 时,线圈周围将产生交变磁场,在被测导体上面因为互感 关系产生电动势,从而产生电涡流。使得位于该磁场中的 金属导体产生新的感应电流,新的感应电流又产生新的交 变磁场,新的交变磁场又会反抗原交变磁场(见图2)。
2 电路设计
基于COMSOL Multiphysics电涡流传感器的仿真和设计.概要

被测导体中电涡流的大小和金属导体的磁导率 、 电阻率 、金属导体的厚度 、通过探头线圈的电流 强度is。频率 f 、以及其与金属导体之间的距离 H有关, 进而线圈的阻抗可以表示为:
t
u
Z F (u, , t, is , f , H )
当上面参数中的一个参数 H发生变化,其它参数不变时,探 头线圈阻抗Z就成为 H的单值函数,当被测体与传感器之间 的相对位置发生改变时,电涡流传感器的电参数也随之发 生变化,把位移量的变化转为电信号的变化,这是电涡流 传感器进行位移测量的基本原理。
汇报人:方超 时间: 2013年5月23日
基于COMSOL Multiphysics电涡流 传感器的仿真和设计
电涡流传感器(Eddy Current Sensor)是电感式位移 传感器的一种,它的最大的特点是能够对位移、厚度、 材料探伤等进行非接触连续的测量,频率响应特好, 弥补了其它电感传感器的不足。 探头是电涡流传感器重要的组成部分,其性能的 好坏直接影响到电涡流传感器的检测质量。涡流检测 探头的结构是由线圈绕组以及骨架和外壳组成,为了 增强线圈的聚磁能力和提高电涡流传感器的灵敏度, 有些还用到磁芯。
设计了一种放置反射式点涡流传感器探头,绕在线圈骨 架上的是一个环形的扁平空心线圈,线圈和线圈骨架一 起置于环形的电涡流探头壳体内。
四种不同参数线圈的探头做实验分析(mm) rb=12 ra=8 h=2 N=89
rb=10 ra=8 h=2 N=45
rb=12 ra=8 h=1 N=45
rb=10 ra=9 h=2 N=67
在电涡流传感器的硬件实现之前,可以通过数值方法 来模拟电涡流传感器,以节省硬件设计的时间和成本。 通常电涡流传感器的电磁机理非常复杂,用精确数学解 析表达式去计算存在着很大的困难,为此本文利用 COMSOL Multiphysic对电涡流传感器探头的电磁场和影 响其性能的结构参数因数进行了仿真和分析,为电涡流 传感器的设计和制作提供了一定的借鉴和帮助。
电涡流传感器的仿真与设计
电涡流传感器的仿真与设计一、本文概述随着科技的飞速发展,传感器技术作为现代工业、自动化控制以及科研实验等领域中不可或缺的一环,其重要性日益凸显。
电涡流传感器作为一种非接触式测量工具,因其高精度、快速响应和广泛的应用范围,受到了广泛关注。
本文旨在深入探讨电涡流传感器的仿真与设计,以期为其在实际应用中的优化和改进提供理论支持和实践指导。
本文首先将对电涡流传感器的基本原理进行阐述,包括电涡流效应的产生机制以及传感器的工作原理。
在此基础上,我们将对电涡流传感器的仿真技术进行深入分析,探讨如何利用仿真软件对传感器性能进行预测和优化。
接着,本文将重点讨论电涡流传感器的设计要点,包括线圈结构、信号处理电路、屏蔽措施等方面,以期提高传感器的测量精度和稳定性。
本文还将关注电涡流传感器在不同应用场景下的性能表现,如高温、高湿、强电磁干扰等恶劣环境下的适应性。
通过实际案例分析,我们将对传感器的性能进行客观评估,并提出针对性的改进措施。
本文将展望电涡流传感器未来的发展趋势,探讨新技术、新材料在传感器设计中的应用前景。
通过本文的研究,我们期望能够为电涡流传感器的仿真与设计提供一套系统的理论框架和实践方法,推动传感器技术的不断发展和创新。
二、电涡流传感器的基本原理电涡流传感器,作为一种非接触式的测量工具,其基本原理基于法拉第电磁感应定律和电涡流效应。
当交变电流通过传感器线圈时,会在其周围产生交变磁场。
当这个磁场靠近导电材料(如金属)表面时,会在材料内部感应出电涡流。
电涡流的大小和相位与磁场强度、材料电导率、磁导率以及传感器与材料之间的距离有关。
电涡流传感器通过测量这个交变磁场与电涡流之间的相互作用,从而实现对材料性质或位置的测量。
具体来说,当传感器与被测物体之间的距离发生变化时,电涡流的大小和相位也会相应变化,进而引起传感器线圈的电感、阻抗或电压的变化。
通过测量这些电气参数的变化,可以实现对被测物体位置、材料电导率等物理量的测量。
电涡流传感器电路设计

电涡流传感器电路设计作者:汪晓凌杜嘉文来源:《硅谷》2013年第01期摘要:在无损测量当中,电涡流传感器测量因为能够实现工件在线非接触测量,测量精度高、无污染、制作价格低廉等优点,一直被作为一种重要的检测设备,在涡流技术高速发展的今天,电涡流的优势越来越明显应用也越来越广泛。
电涡流传感器是电涡流测量淬火层厚度的核心部分,传感器的测量精度直接影响整个测厚设备的精度,传统的电涡流传感器包括测量探头、整流滤波电路的设计、放大器的设计等,电涡流传感器的精确测量也离不开位移测厚标定器,这里主要研究电涡流测厚核心电路的设计。
关键词:无损测量;电涡流;测厚;电路0 引言电涡流无损检测具有很悠久的历史,从Michael Faradays总结出电磁感应定律,即变化的磁场能产生电场以来,电磁感应相关技术取得了巨大的发展。
后来Foster提出的通过分析系统的阻抗变化来分析涡流检测仪的干扰因素,为涡流检测提供了很好的理论依据,大大推动了电涡流无损检测技术的发展。
通过对阻抗分析法的有效运用,电涡流测量技术已经渗透到我们工业测量的方方面面,包括了航空航天、核工业、机械、冶金、石油、化工、机械、汽车等部门,电涡流无损技术的快速发展,相关研究和运用也越来越广泛,其中传感器的电路设计和测量精度的控制都是研究的焦点。
1 涡流检测原理图涡流检测是无损检测的一个分支,是运用电磁感应原理,将一半径为r的线圈通过正弦波电流后,线圈周围就会产生一交变磁场H1;若在距线圈x处有一电导率为a,磁导率为u厚度为d的金属板,线圈周围的交变磁场会在金属表面产生感应电流,也称作涡流。
金属表面也产生一个与原磁场方向相反的相同的相同频率的磁场H2,反射到探头线圈,导致载流线圈的阻抗和电感的变化,改变了线圈的电流大小及相位,原理图如图1所示。
图1 电涡流测厚原理图2 测厚探头的设计图2 电涡流测量电路整体设计图电涡流测量电路的整体测量电路设计图如图2所示,涡流探头测量物体厚度后引起阻抗的变化,通过电桥电路转化成电流信号输出,也由于信号很微弱,需要经过放大器进行功率放大输出,经过整波电路,把交流信号转化为直流信号,然后把那些高频的还有低频的号过滤掉,得到干扰较小的电流信号,经过放大器尽心比例放大后接入ARM7的A/D转换接口,把模拟信号转化为数字信号,对信号进行控制然后接入数字示波器,观察波形输出,把结果通过PC 机显示出来[1]。
电涡流位移传感器设计

HEFEI UNIVERSITY OF TECHNOLOGY《传感器原理及应用》课程考核论文题目电涡流位移传感器设计班级机设八班学号姓名成绩机械与汽车工程学院机械电子工程系二零一二年五月电涡流位移传感器摘要:随着现代测量、控制盒自动化技术的发展,传感器技术越来越受到人们的重视。
特别是近年来,由于科学技术的发展及生态平衡的需要,传感器在各个领域的作用也日益显著。
传感器技术的应用在许多个发达国家中,已经得到普遍重视。
在工程中所要测量的参数大多数为非电量,促使人们用电测的方法来研究非电量,及研究用电测的方法测量非电量的仪器仪表,研究如何能正确和快速的非电量技术。
电涡流传感器已成为目前电测技术中非常重要的检测手段,广泛的应用于工程测量和科学实验中。
关键词:电涡流式传感器传感器技术电量非电量Abstract:With modern measurement, control box of automation technology development, the sensor technology is more and more attention by people. Especially in recent years, due to the development of science and technology and ecological balance the need, sensor in various fields are also increasingly significant role. The sensor technology application in many developed countries, has been paid attention to. In the project in measured parameters for the most power, the power to urge people to approach to the power, and the research method of the electricity measurement of electric instruments, to study how to correct and fast the power technology. The eddy current sensor has become the electrical measurement technology is very important means of detection, widely used in engineering survey and scientific experiments.Key words:Eddy current sensor, sensor technology ,non-power electrical measurement techniques,一:总体设计方案电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。
电涡流传感器位移特性实验

电涡流传感器位移特性实验
实验目的:
研究电涡流传感器的位移特性。
实验原理:
电涡流传感器是利用电涡流现象进行测量的传感器。
当导体中存在变化的磁场时,就会形成涡流,导致导体表面电流密度分布不均匀,这种现象称为电涡流现象。
电涡流传感器是利用这种现象进行测量的。
电涡流传感器由一个固定的线圈和一个可动的导体组成,当可动导体相对于线圈发生位移时,会产生涡流,从而改变线圈的电阻值,进而得到位移信息。
实验器材:
电涡流传感器、信号放大器、信号采集器、示波器、位移台、自行设计的位移系统等。
实验步骤:
1. 将电涡流传感器固定在一定的位置上,接上信号放大器并连接示波器。
2. 在示波器上观察电涡流传感器输出信号的波形和大小。
3. 将电涡流传感器放置在位移台上,在不同的位移位置上对预期的位移系统进行移动操作。
4. 在每个位移位置上读取电涡流传感器输出信号的波形和大小。
5. 将实验数据进行处理和分析,得到电涡流传感器的位移特性曲线。
实验注意事项:
1. 实验过程中要注意调整信号放大器的增益和滤波器的带宽,以保证信号的质量。
2. 移动位移系统时要注意操作轻柔,避免对电涡流传感器和位移系统造成损坏。
3. 实验结束后要注意恢复实验现场和接线状态,并注意设备的安全。
电涡流式位移传感器实验报告
电涡流式位移传感器实验报告引言:电涡流式位移传感器是一种常用于测量物体位移的传感器。
它通过感应物体表面的涡流引起的感应电磁场变化来实现位移测量。
本实验旨在通过实验验证电涡流式位移传感器的工作原理,并探究其在位移测量中的应用。
实验目的:1. 了解电涡流式位移传感器的工作原理;2. 学习使用电涡流式位移传感器进行位移测量;3. 分析位移测量结果的准确性和稳定性。
实验仪器和材料:1. 电涡流式位移传感器;2. 示波器;3. 可调直流电源;4. 待测物体。
实验步骤:1. 将待测物体固定在实验台上,并将电涡流式位移传感器的感应头靠近物体表面;2. 连接电涡流式位移传感器和示波器,并调节示波器的参数以观察信号波形;3. 通过调节可调直流电源的电压,改变电涡流式位移传感器的工作距离,记录不同工作距离下的信号波形;4. 根据示波器上的信号波形,计算出不同工作距离下的位移值;5. 重复上述步骤,以获得多组位移测量数据。
实验结果和分析:根据实验记录的信号波形和位移测量数据,可以得出以下结论:1. 电涡流式位移传感器的工作距离与信号波形的变化呈反比关系,即工作距离越小,信号波形的振幅越大;2. 通过对信号波形的观察和分析,可以较准确地计算出位移值;3. 在一定范围内,电涡流式位移传感器的测量结果具有较高的准确性和稳定性。
实验结论:通过本实验,验证了电涡流式位移传感器的工作原理,并探究了其在位移测量中的应用。
实验结果表明,电涡流式位移传感器具有较高的测量精度和稳定性,在工业自动化控制和机械加工等领域有着广泛的应用前景。
参考文献:[1] Xie Y, Zhang H, Fu C, et al. Design and fabrication of an eddy current displacement sensor[J]. Sensors, 2018, 18(10): 3243.[2] Wei D, Zhao J, Yan Y. Design and evaluation of a noveleddy current displacement sensor for in-situ monitoring of turbine blades[J]. IEEE Sensors Journal, 2019, 19(13): 5284-5291.。
实验 电涡流传感器位移特性实验

实验电涡流传感器位移特性实验一、实验目的:了解电涡流传感器测量位移的工作原理和特性。
二、基本原理:电涡流式传感器是一种建立在涡流效应原理上的传感器。
电涡流式传感器由传感器线圈和被测物体(导电体—金属涡流片)组成,如图17.1.1所示。
根据电磁感应原理,当传感器线圈(一个扁平线圈)通以交变电流(频率较高,一般为1MHz~2MHz)I1时,线圈周围空间会产生交变磁场H1,当线圈平面靠近某一导体面时,由于线圈磁通链穿过导体,使导体的表面层感应出呈旋涡状自行闭合的电流I2,而I2所形成的磁通链又穿过传感器线圈,这样线圈与涡流“线圈”形成了有一定耦合的互感,最终原线圈反馈一等效电感,从而导致传感器线圈的阻抗Z发生变化。
我们可以把被测导体上形成的电涡等效成一个短路环,这样就可得到如图17.1.2的等效电路。
图中R1、L1为传感器线图17.1.1 电涡流传感器原理图图17.1.2 电涡流传感器等效电路图圈的电阻和电感。
短路环可以认为是一匝短路线圈,其电阻为R2、电感为L2。
线圈与导体间存在一个互感M,它随线圈与导体间距的减小而增大。
根据等效电路可列出电路方程组:通过解方程组,可得I1、I2。
因此传感器线圈的复阻抗为:线圈的等效电感为:线圈的等效Q 值为:Q =Q 0{[1-(L2ω2M2)/(L1Z22)]/[1+(R 2ω2M2)/( R 1Z22)]}式中:Q 0 — 无涡流影响下线圈的Q值,Q 0=ωL1/R 1; Z22— 金属导体中产生电涡流部分的阻抗,Z22=R 22+ω2L 22。
由式Z 、L 和式Q可以看出,线圈与金属导体系统的阻抗Z 、电感L 和品质因数Q值都是该系统互感系数平方的函数,而从麦克斯韦互感系数的基本公式出发,可得互感系数是线圈与金属导体间距离x(H)的非线性函数。
因此Z 、L 、Q均是x的非线性函数。
虽然它整个函数是一非线性的,其函数特征为"S"型曲线,但可以选取它近似为线性的一段。
电涡流位移传感器设计

电涡流位移传感器设计技术要求:1、量程:0~20mm2、精度:1mm3、激励频率:1M Hz4、输入电压:24V5、介质温度: -50℃~250℃6、表面的粗糟度: 0.4μm~0.8μm7、线性误差:<±2%8、工作温度:探头(-20~120)℃,延长电缆(-20~120)℃,前置器(-30~50)℃9、频率响应:0~5KHz一、总体设计方案电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。
它是一种非接触的线性化计量工具。
电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。
电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点。
根据下面的组成框图,构成传感器。
根据组成框图,具体说明各个组成部分的材料:(1)敏感元件:传感器探头线圈是通过与被测导体之间的相互作用,从而产生被测信号的部分,它是由多股漆包铜线绕制的一个扁平线圈固定在框架上构成,线圈框架的材料是聚四氟乙烯,其顺耗小,电性能好,热膨胀系数小。
(2)传感元件: 前置器是一个能屏蔽外界干扰信号的金属盒子,测量电路完全装在前置器中,并用环氧树脂灌封。
(3)测量电路:本电路拟采用晶体振子及其外围电路来产生振荡。
同时考虑到当采用晶体振子构成正弦波振荡电路时,有众多的模拟要素需要处理。
如电路常数的确定,工作点的设定和负载阻抗的选用等。
因此本电路将采用由COMS反向器与晶体振子组成的最简单且稳定性高的电路,来产生频率为1M的方波信号源。
二、电涡流传感器的基本原理2.1 电涡流传感器工作原理根据法拉第电磁感应定律,当传感器探头线圈通以正弦交变电流i1时,线圈周围空间必然产生正弦交变磁场H1,它使置于此磁场中的被测金属导体表面产生感应电流,即电涡流,如图2-2中所示。
与此同时,电涡流i2又产生新的交变磁场H2;H2与H1方向相反,并力图削弱H1,从而导致探头线圈的等效电阻相应地发生变化。
电涡流位移传感器实验报告

实验目的:通过对电涡流位移传感器的实验,了解其工作原理、特性以及在位移测量中的应用。
### 1. 实验背景
电涡流位移传感器是一种非接触、高精度的位移传感器,主要应用于测量金属导体的微小位移。
本实验旨在深入了解电涡流位移传感器的性能参数和使用方法。
### 2. 实验设备
- 电涡流位移传感器
- 信号调理电路
- 示波器
- 位移标准样品
### 3. 实验步骤
1. 连接电路:将电涡流位移传感器与信号调理电路连接,确保连接正确无误。
2. 设置示波器:对示波器进行适当设置,以便观察电涡流传感器输出信号的波形。
3. 校准:使用位移标准样品对电涡流传感器进行校准,调整信号调理电路,确保输出信号与位移值对应准确。
4. 进行位移测量:将电涡流传感器放置在待测物体上,通过示波器观察和记录输出信号的变化,进行位移测量。
5. 性能评估:测量不同位移值下的输出信号,并评估电涡流位移传感器的灵敏度、稳定性和线性度等性能指标。
### 4. 实验数据处理
对实验得到的数据进行整理和分析,绘制位移与输出信号的关系曲线,计算性能指标。
### 5. 实验结论
根据实验数据和分析结果,得出电涡流位移传感器在不同条件下的性能特点,评估其在位移测量中的适用性。
### 6. 实验总结
通过本次实验,深入了解了电涡流位移传感器的工作原理和性能,掌握了其在位移测量中的应用方法,为今后的传感器应用和实验研究提供了基础。
### 7. 实验改进和展望
根据实验中的经验,提出可能的实验改进方案,并展望电涡流位移传感器在未来的发展方向和应用领域。
电涡流式位移传感器实验报告

电涡流式位移传感器实验报告一、引言电涡流式位移传感器是一种常用的非接触式位移测量装置,它基于涡流效应原理,可用于测量金属物体的位移变化。
本实验旨在探究电涡流式位移传感器的原理和性能,并通过实验验证其在位移测量中的应用。
二、实验原理电涡流效应是指当导体在磁场中运动或受力时,由于磁场的变化而在导体中产生涡流的现象。
在电涡流式位移传感器中,传感器探头由线圈和磁铁构成。
当探头靠近金属物体时,磁铁产生的磁场会感应出涡流,并改变线圈的电阻。
通过测量线圈的电阻变化,可以确定金属物体的位移大小。
三、实验步骤1. 准备实验装置:将电涡流式位移传感器固定在测量平台上,将金属物体放置在传感器上方,并调整传感器与金属物体的距离。
2. 连接电路:将传感器的线圈接入测量电路中,保证电路的可靠连接。
3. 调节参数:根据实际情况,调节传感器的灵敏度和滤波器的参数,以获得准确的位移测量结果。
4. 进行位移测量:通过改变金属物体的位置或距离,记录传感器输出的电阻值,并计算出相应的位移值。
5. 数据分析:根据实验数据,分析位移测量的准确性和稳定性,评估电涡流式位移传感器的性能。
四、实验结果经过多次实验测量,我们得到了一系列位移测量数据,并计算出相应的位移值。
实验结果表明,电涡流式位移传感器具有较高的测量精度和稳定性,在不同位移范围内均能提供准确的测量结果。
五、实验讨论1. 影响位移测量精度的因素:在实验中,我们发现传感器与金属物体的距离、金属物体的材料和形状等因素都会对位移测量结果产生影响。
通过合理调整传感器的参数和选择合适的金属物体,可以提高位移测量的精度。
2. 传感器的应用范围:电涡流式位移传感器广泛应用于工业自动化、机械制造和航天航空等领域,用于测量零件的位移、振动和变形等参数,为工程设计和质量控制提供重要的数据支持。
六、结论通过本次实验,我们深入了解了电涡流式位移传感器的原理和性能,并验证了其在位移测量中的应用。
实验结果表明,电涡流式位移传感器具有高精度、稳定性好的优点,适用于各种位移测量场景。
电涡流式位移传感器实验报告
电涡流式位移传感器实验报告前言位移传感器是一种用于测量目标物体位置变化的装置。
在各个领域中都有广泛的应用,比如工业自动化、机械制造以及医疗设备等。
本实验将研究一种常见的位移传感器——电涡流式位移传感器,并通过实验测试其性能和准确性。
一、实验原理电涡流位移传感器是一种非接触式传感器,通过检测金属目标物体上产生的电涡流来测量目标物体的位移。
当一个金属目标物体靠近传感器时,传感器中的线圈会产生交变磁场。
这个交变磁场会引起目标物体上的电流变化,从而产生一个反向的磁场与传感器磁场相互作用。
通过检测目标物体上的电流变化来测量目标物体的位移。
传感器输出的电压信号与目标物体的位置成正比。
二、实验准备1. 装置:电涡流位移传感器、目标物体、信号发生器、示波器。
2. 连接:将信号发生器和示波器连接到电涡流位移传感器上。
三、实验步骤1. 将目标物体放置在电涡流位移传感器的感应范围内。
2. 设置信号发生器的频率和振幅,可以根据实际需要进行设置。
3. 打开示波器,并选择合适的测量范围。
4. 观察示波器上显示的波形,并记录下电压的变化。
四、实验结果通过实验,我们得到了与目标物体位置变化相关的电压信号波形。
通过观察示波器上的波形,我们可以获得目标物体位移的信息。
实验结果表明电涡流式位移传感器具有较好的线性和精确性,可以用于准确测量目标物体的位移。
五、实验分析电涡流式位移传感器的原理是基于金属材料的导电性以及磁场和电流的相互作用。
目标物体的位置变化引起了电涡流的变化,从而影响传感器输出的电压信号。
通过对电压波形的观察和分析,我们可以得到目标物体位置变化的相关信息。
因此,电涡流式位移传感器在工业生产中应用非常广泛。
六、实验应用电涡流位移传感器可以用于各种需要测量位移的场合。
在机械制造中,可以用于检测零件的装配精度;在汽车工业中,可以用于测量活塞的位置变化;在医疗设备中,可以用于测量人体关节的运动等。
由于电涡流式位移传感器具有非接触式测量和高精度等特点,因此在现代工业中得到了广泛的应用。
电涡流传感器的位移特性实验报告
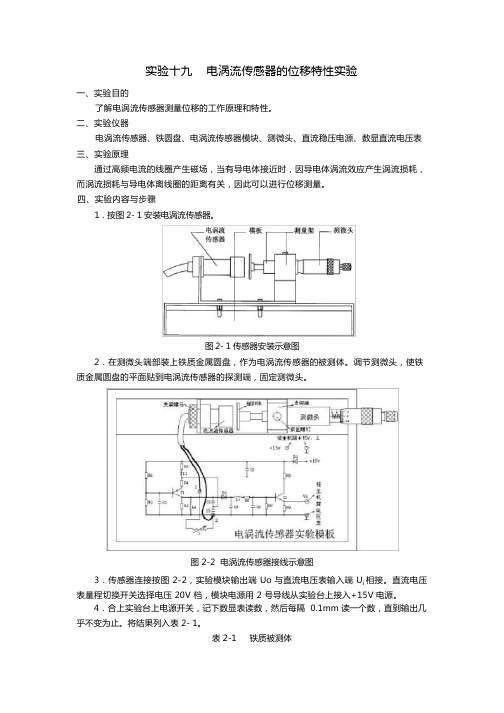
实验十九电涡流传感器的位移特性实验一、实验目的了解电涡流传感器测量位移的工作原理和特性。
二、实验仪器电涡流传感器、铁圆盘、电涡流传感器模块、测微头、直流稳压电源、数显直流电压表三、实验原理通过高频电流的线圈产生磁场,当有导电体接近时,因导电体涡流效应产生涡流损耗,而涡流损耗与导电体离线圈的距离有关,因此可以进行位移测量。
四、实验内容与步骤1.按图 2- 1 安装电涡流传感器。
图 2- 1 传感器安装示意图2.在测微头端部装上铁质金属圆盘,作为电涡流传感器的被测体。
调节测微头,使铁质金属圆盘的平面贴到电涡流传感器的探测端,固定测微头。
图 2-2 电涡流传感器接线示意图3.传感器连接按图 2-2,实验模块输出端 Uo 与直流电压表输入端 U i 相接。
直流电压表量程切换开关选择电压 20V 档,模块电源用 2 号导线从实验台上接入+15V 电源。
4.合上实验台上电源开关,记下数显表读数,然后每隔 0.1mm 读一个数,直到输出几乎不变为止。
将结果列入表 2- 1。
表 2-1 铁质被测体X (mm) 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 U O (V)0.020.210.370.530.670.830.991.141.301.46X (mm)1.11.2 1.31.4 1.5 1.61.7 1.8 1.92.0 U O (V)1.621.801.972.152.322.492.682.863.053.23X (mm)2.12.22.32.4 2.5 2.62.72.82.93.0 U O (V)3.433.623.823.843.843.843.843.843.843.845.根据上表数据,画出 V-X 曲线,根据曲线找出线性区域及进行正、负位移测量时的 最佳工作点(即曲线线性段的中点) ,试计算测量范围为 1mm 与 3mm 时的灵敏度和线性度4.5 4 3.5 32.5系列12 1.5 1 0.5 00 0.5 1 1.5 2 2.5 3y = 1.6852x - 0.1647R 2 = 0.99761.5 2 4.5 4 3.5 32.5 2 1.5 1 0.5 0 -0.5 00.5 2.51(1)由上图可得系统灵敏度: S= ΔV/ΔW=1.6825V/mm(2)由上图可得非线性误差:当 x=1mm 时:Y=1.6825×1-0.1647=1.5178VΔm =Y- 1.46=0.0578VyFS=2.32Vδf = Δm /yFS × 100%=2.49%当 x=3mm 时:Y=1.6825×3-0.1647=4.4828VΔm =Y-3.84=1.0428VyFS=3.84Vδf = Δm /yFS × 100%=27.15%五、思考题1、电涡流传感器的量程与哪些因素有关,如果需要测量±5mm 的量程应如何设计传感器?答:量程与线性度、灵敏度、初始值均有关系。
位移电涡流传感器测量电路设计

成绩评定:传感器技术课程设计题目位移电涡流传感器测量电路设计摘要电涡流传感器由于具有对介质不敏感、非接触的特点,广泛应用于对金属的位移检测中。
为扩大电涡流传感器的测量范围,采用恒频调幅式测量电路,引用指数运算电路作为非线性补偿环节。
利用Matlab计算软件辅助设计了直径为60mm电涡流传感器探头,并结合测量电路进行实验。
实验结果表明最大测量范围接近90mm,验证了该系统工作的稳定性,证明设计达到了预期效果。
关键词:电涡流传感器;测量电路;大位移;线性化目录一、设计目的------------------------- 1二、设计任务与要求--------------------- 12.1设计任务------------------------- 12.2设计要求------------------------- 1三、设计步骤及原理分析 ----------------- 13.1设计方法------------------------- 13.2设计步骤------------------------- 23.3设计原理分析---------------------- 6四、课程设计小结与体会 ----------------- 6五、参考文献-------------------------- 6一、设计目的1.了解电涡流传感器测量位移的工作原理和特性。
2.了解电涡流传感器的前景及用途二、设计任务与要求2.1设计任务扩大电涡流传感器的测量范围,采用恒频调幅式测量电路,引用指数运算电路作为非线性补偿环节。
验证了该系统工作的稳定性,证明设计达到了预期效果。
2.2设计要求1. 工作在常温、常压、稳态、环境良好;2. 设计传感器应用电路并画出电路图;3. 应用范围:测量物体的位移。
三、设计步骤及原理分析3.1设计方法电涡流传感器具有体积小、非接触、对介质不敏感的特点,被广泛应用于对金属位移等的测量中。
基于LabVIEW的电涡流位移传感器测量系统设计与研究

使! k !
2 i 2 i
对 k 和 b 一阶偏导数等于 0, 即 = 2! ( yi - kx i - b) ( - x i ) = 0 ( 4) ( 5)
! 2 i = 2! ( yi - kx i - b) ( - 1 ) = 0 b 从而求出 k 和 b 的表达式为 k= b= n ! xiyi - ! xi ! yi 2 2 n ! xi - ( ! xi ) ! xi ! yi - ! xi ! x iyi
收稿日期: 2008- 09- 16 作者简介: 王欣威 ( 1977 ), 女, 讲师。主要研究方向为 传感器 与测 控技术、 虚拟仪 器、测试 信号 与信息 处理 技术。电 话: 13079256735, E- m a i: l wangx inw ei1977 @ 163 co m。
第 9期
王欣威 等 : 基于 L abV IEW 的电涡流位移传感器测量系统设计与研究
161
标定对于测量系统来说是很关键的一步, 传感器 经静态标定后, 可以获得静标曲线, 求得灵敏度、线 性度等静态特性指标, 并确定线性工作范围, 进而得 到利用电涡 流 传感 器进 行测 量 时的 最佳 工作 点 的范 围 。 标 定时首 先, 移动 测 微头 与传 感 器线 圈 端部 接 触 , 并记 录计算 机 采 集 到 的 电 压 值, 转 动 测 微 头, 每 隔 0 2mm 记录此 时 的电 压 值, 得到 了 一对 数 据, 如 此下去 , 直到把 整个 测量 范围 的标 定 数据 全部 得 到 。再反 方向转动 测微头 , 每隔 0 2mm 记录 此时的 电 压值, 又得到 了一 对数 值, 如此 下去 , 直 到把 整 个 测量范 围反方向 的标 定 数据 全部 得到 。采 用最 小 二 乘和 端 点 连 线 法 两 种 直 线 拟 合 的 方 法 进 行 线 性 化 , 并求 出灵敏度 和 线性 度。如 图 4 所示 为 标定 系 统 的前面 板。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电涡流位移传感器设计技术要求:1、量程:0~20mm2、精度:1mm3、激励频率:1M Hz4、输入电压:24V5、介质温度: -50℃~250℃6、表面的粗糟度: 0.4μm~0.8μm7、线性误差:<±2%8、工作温度:探头(-20~120)℃,延长电缆(-20~120)℃,前置器(-30~50)℃9、频率响应:0~5KHz一、总体设计方案电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。
它是一种非接触的线性化计量工具。
电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。
电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点。
根据下面的组成框图,构成传感器。
根据组成框图,具体说明各个组成部分的材料:(1)敏感元件:传感器探头线圈是通过与被测导体之间的相互作用,从而产生被测信号的部分,它是由多股漆包铜线绕制的一个扁平线圈固定在框架上构成,线圈框架的材料是聚四氟乙烯,其顺耗小,电性能好,热膨胀系数小。
(2)传感元件: 前置器是一个能屏蔽外界干扰信号的金属盒子,测量电路完全装在前置器中,并用环氧树脂灌封。
(3)测量电路:本电路拟采用晶体振子及其外围电路来产生振荡。
同时考虑到当采用晶体振子构成正弦波振荡电路时,有众多的模拟要素需要处理。
如电路常数的确定,工作点的设定和负载阻抗的选用等。
因此本电路将采用由COMS反向器与晶体振子组成的最简单且稳定性高的电路,来产生频率为1M的方波信号源。
二、电涡流传感器的基本原理2.1 电涡流传感器工作原理根据法拉第电磁感应定律,当传感器探头线圈通以正弦交变电流i1时,线圈周围空间必然产生正弦交变磁场H1,它使置于此磁场中的被测金属导体表面产生感应电流,即电涡流,如图2-2中所示。
与此同时,电涡流i2又产生新的交变磁场H2;H2与H1方向相反,并力图削弱H1,从而导致探头线圈的等效电阻相应地发生变化。
其变化程度取决于被测金属导体的电阻率ρ,磁导率μ,线圈与金属导体的距离x,以及线圈激励电流的频率f等参数。
如果只改变上述参数中的一个,而其余参数保持不变,则阻抗Z就成为这个变化参数的单值函数,从而确定该参数的大小。
电涡流传感器的工作原理,如图2-2所示:2.2 电涡流传感器等效电路分析为了便于分析,把被测金属导体上形成的电涡流等效成一个短路环中的电流,这样就可以得到如图2-3所示的等效电路。
图中R1,L1为传感器探头线圈的电阻和电感,短路环可以认为是一匝短路线圈,其中R2,L2为被测导体的电阻和电感。
探头线圈和导体之间存在一个互感M,它随线圈与导体间距离的减小而增大。
U1为激励电压,根据基尔霍夫电压平衡方程式,上图等效电路的平衡方程式如下:经求解方程组,可得I1和I2表达式:由此可得传感器线圈的等效阻抗为:从而得到探头线圈等效电阻和电感。
通过式(2-4)的方程式可见:涡流的影响使得线圈阻抗的实部等效电阻增加,而虚部等效电感减小,从而使线圈阻抗发生了变化,这种变化称为反射阻抗作用。
所以电涡流传感器的工作原理,实质上是由于受到交变磁场影响的导体中产生的电涡流起到调节线圈原来阻抗的作用。
因此,通过上述方程组的推导,可将探头线圈的等效阻抗Z表示成如下一个简单的函数关系:其中,x为检测距离;μ为被测体磁导率;ρ为被测体电阻率;f为线圈中激励电流频率。
所以,当改变该函数中某一个量,而固定其他量时,就可以通过测量等效阻抗Z的变化来确定该参数的变化。
在目前的测量电路中,有通过测量ΔL或ΔZ等来测量x ,ρ,μ,f的变化的电路。
2.3 电涡流传感器测量电路原理电涡流传感器常用的测量电路有电桥电路和谐振电路,阻抗Z的测量一般用电桥,电感L的测量电路一般用谐振电路,其中谐振电路又分为调频式和调幅式电路。
电桥法是将传感器线圈的等效阻抗变化转换为电压或电流的变化。
图2-4为电桥法的原理图。
图中A,B两线圈作为传感器线圈。
传感器线圈与两电容的并联阻抗作为电桥的桥臂,起始状态,使电桥平衡。
在进行测量时,由于传感器线圈的等效阻抗发生变化,使电桥失去平衡,将电桥不平衡造成的输出信号进行放大并检波,就可得到与被测量成正比的输出。
电桥法主要用于两个电涡流线圈组成的差动式传感器。
谐振法是将传感器线圈的等效电感的变化转换为电压或电流的变化,传感器线圈与电容并联组成LC并联谐振回路,其谐振频率为,谐振时回路的等效阻抗最大,Z =L/RC,其中R为谐振回路等效电阻。
当线圈电感L 发生变化时,回路的等效阻抗和谐振频率都将随L的变化为变化,因此可以利用测量回路阻抗的方法或测量回路谐振频率的方法间接测出传感器的被测值。
调频式电路是通过测量谐振频率的变化来进行测量,其结构简单,便于遥测和数字显示;而调幅式电路是通过测量等效阻抗的变化来进行测量,由于采用了石英晶体振荡器,因此稳定性较高。
下面以调幅式测量电路为例,说明谐振法的测量原理,如图2-5所示:从图中可以看出LC谐振回路由一个频率及幅值稳定的晶体振荡器提供一个高频信号激励谐振回路。
LC回路的输出电压为,其中i0为激励电流,Z为等效阻抗。
测量中,当探头线圈远离被测金属导体时,LC回路处于谐振状态,谐振回路上的输出电压最大;当探头线圈接近被测金属导体时,线圈的等效电感发生变化,导致回路失谐而等效阻抗发生变化,使输出电压下降。
输出的电压再经过放大,检波,滤波后由指示仪器(电压表)读出,或输入示波器显示电压波形。
这样就实现了将L-x关系转换成V-x关系,通过对输出电压的测量,可确定电涡流传感器线圈与被测金属导体之间的距离x。
电涡流传感器就是利用涡流效应,将非电量转换为阻抗的变化而进行测量的。
三、电涡流传感器探头参数3.1 传感器线圈尺寸的选取线圈轴向的磁场分布对涡流传感器的灵敏度和线性范围起决定性作用。
对传感器来说总是希望灵敏度高,线性范围大。
欲使线性范围大,就要求磁场轴向分布范围大;欲使灵敏度高,就要求轴向磁场强度变化梯度大。
单匝的载流线圈在轴线上的磁感强度可以根据毕奥-萨伐定律推出:式中:μ——真空的磁导率;r——线圈的半径;I——通过线圈的电流;x——轴线上某点P至线圈中心的距离。
①当x小时(被测体靠近线圈),线圈半径r小,则产生的磁感应强度大。
②当x 大时(被测体远离线圈),磁感应强度小,且半径小的变化梯度大,线圈半径大的变化梯度小。
为了有较大的测量范围,线圈的半径应大一些。
线圈通以电流I 时,则线圈的电流密度为:则通过截面dx ,dy 处的圆形电流元的电流为:i=NI/((r b - r a )h) dx · dy 此电流在轴线任意点P 处所产生的磁感应强度为:整个载流扁平线圈通以电流I 后,在轴线上任意P 点处产生的磁感应强度为:式中,x1 就是扁平线圈端面到被测体的距离,可用x 表示,所以线圈轴线上某点P 产生的磁感应强度可改写为:按表1 中所给参数可做出线圈几何尺寸与线性范围曲线图,可得如下结论:线圈的匝数越多,线性范围越大;线圈薄时,灵敏度高,因此在设计传感器时,为使一定大小外径的传感器有较大的线性范围和尽可能高的灵敏度,要求线圈厚度越薄越好;线圈内径改变时,只有在被测体与传感器靠近处略有变化;线圈外径大时,传感器的敏感范围大,线性范围相应才会增大,但灵敏度降低,对于要求测量范围大的传感器,线圈外径要大一些。
线圈编号外径(mm ) 外径(mm ) 匝数n 轴向厚度h (mm) 130 25 500 10 230 25 200 10 330 25 500 10 430 25 500 2 530 28 500 2 630 20 500 2 730 20 500 2 8 20 15500 2图3 距离电压变化曲线因此,电涡流传感器的灵敏度与线性范围,主要取决于传感器线圈的参数。
线圈的外径大,传感器的测量线性范围大,但灵敏度低;线性范围小,但灵敏度高,线圈薄时,灵敏度高。
四、电涡流传感器新型测量电路的设计4.1 电路实现方案本文采用如图所示的电路结构进行该电路的设计。
4.2 振荡电路的选择所谓振荡,就是指能持续发生一定振幅,一定频率的电振动的现象。
从而把持续发生电振动的电路,称为振荡电路。
振荡电路是为各种电子电路和电子仪器提供信号的来源,是电子仪器中不可缺少的器件。
鉴于晶体振荡器频率稳定度高于RC和LC振荡电路,因此本电路拟采用晶体振子及其外围电路来产生振荡。
同时考虑到当采用晶体振子构成正弦波振荡电路时,有众多的模拟要素需要处理。
如电路常数的确定,工作点的设定和负载阻抗的选用等。
因此本电路将采用由COMS反向器与晶体振子组成的最简单且稳定性高的电路,来产生频率为1M的方波信号源。
具体的电路结构如图4-5中所示:在上图中,从晶体振子的两个端子看C1和C2,可知该电路实际上就是晶体等效电感Lx 与串联电容CL构成的LC并联谐振电路。
因此该电路的振荡频率f可如下式表示:式中CL 为负载电容C1和C2的串联值,即由于负载电容CL远远小于晶体振子的静态电容,从式中可以看出,振荡频率f的变化非常小,基本由晶体振子的振荡频率来决定电路振荡频率的大小,因此由COMS反向器与晶体振子构成的振荡电路能够稳定地产生电路所需要的方波信号。
4.3 滤波电路的选择通过上节的COMS晶体振荡器,产生出了稳定的方波。
方波图形和其分解表达式如图4-6所示。
从表达式中可以看出,方波是正弦波的合成波形,其振幅是基波的奇次倍频率波形振幅的合成。
若从中抽出高次谐波,即可得到所需正弦波。
由于本次设计需要滤掉方波中高于1M的信号,因此可以选用低通滤波器将方波变成正弦波。
滤波电路有多种形式,大致分为有源滤波和无源滤波,二者最大的差别在于滤波电路中是否使用了有源元器件——运算放大器。
对于截止频率为MHz数量级的滤波电路,则有源滤波器对运算放大器等的高频特性要求非常严格。
因此在本电路中,将采用结构相对简单的无源滤波电路。
在滤波器的近代设计方法中有各种方式,如巴特沃思型、切比雪夫型、贝塞型、高斯型等。
本文选用通带内响应最为平坦的巴特沃思型低通滤波器,它对构成滤波器的元件Q值要求较低,因而易于制作和达到设计性能。
为了同时满足电路滤波的精确性和结构简单,本次设计预选用巴特沃思型3阶低通滤波器,其基本结构和对数幅频特性如图4-7所示:4.4 增益调节电路的选择经过滤波电路后输出的正弦波信号,由于信号幅值的衰减,很难直接满足设计时的要求。
因此在电路中,为了便于调节,使输出电压值能满足需要,有必要在滤波电路之后加上一个增益调节环节。
常用的增益调节电路,有同相比例放大器和反向比例放大器。
具体的电路结构分别如图4-8中(a)、(b)所示:上图中两电路的基本特性参数比较如表4-1所示:从上表中可以看出,两电路都能灵活调节输出电压幅值的大小。