37速度加速度及振动检测(li)
振动检测仪表原理、结构和应用

3振动检测仪表原理、结构和应用3.1振动检测仪表原理、结构3.1.1振动检测概述振动传感器是将机械振动量转换为成比例的模拟电气量的机电转换装置。
传感器至少有机械量的接收和机电量的转换二个单元构成。
机械接收单元感受机械振动,但只接收位移、速度、加速度中的一个量;机电转换单元将接收到的机械量转换成模拟电气量,如电荷、电动势、电阻、电感、电容等;另外,还配有检测放大电路或放大器,将模拟电气量转换、放大为后续分析仪器所需要的电压信号,振动监测中的所有振动信息均来自于此电压信号。
(1)振动传感器种类振动传感器的种类很多,且有不同的分类方法。
按工作原理的不同,可分为电涡流式、磁电式(电动式)、压电式;按参考坐标的不同,可分为相对式与绝对式(惯性式);按是否与被测物体接触,可分为接触式与非接触式;按测量的振动参数的不同,可分为位移、速度、加速度传感器;以及由电涡流式传感器和惯性式传感器组合而成的复合式传感器,等等。
在现场实际振动检测中,常用的传感器有磁电式速度传感器(其中又以绝对式应用较多)、压电式加速度传感器和电涡流式位移传感器。
其中,加速度传感器应用最广,而大型旋转机械转子振动的测量几乎都是涡流式传感器。
振动传感器设计时采用的机电变换原理不同,在输出电量时也就会有所区别。
振动传感器接收机械量变化信息,转化为电动势变化、电荷变化、电阻变化等电参量变化。
振动传感器的测量线路会接收这些电信号,并放大和转换为分析、显示仪表所能接受的电压信号。
振动传感器在工作原理和工作过程上的这些差别,如振动传感器的不同机械接收原理、不同测量机械量、不同机电变换原理,为振动传感器的种类划分提供了基本依据,是目前振动传感器最主要的三种分类方式。
①振动传感器的机械接收原理有两种,分别是相对式机械接收原理和惯性式机械接收原理,振动传感器按此分类也就是相对式振动传感器和惯性式振动传感器。
相对式机械接收原理:由于机械运动是物质运动的最简单的形式,因此人们最先想到的是用机械方法测量振动,从而制造出了机械式测振仪(如盖格尔测振仪等)。
内科大安全环境监测技术教案第7章 振动检测

【课堂教学小结】3分钟)1、振动与噪音本质上相同,只是频率和传播介质不同。
2、我们所学振动检测,重点掌握环境振动的检测,适合我们矿业的作业场所。
参考位置等优点,由于它的脉冲响应优异,更适合于冲击的测量。
CI=史=2力V=Q时)2Adt4)拾振器的充分利用一般情况尽量用同参数相应的传感器进行测量,也可用电学微积分原理进行测量,但测量误差较大。
7.4拾振器7.4.1 压电式加速度计1.1.1 工作原理(1)组成:压电晶体、弹簧元件、外壳、引线。
(2)原理:(图示说明)2)特点体积小、灵敏度高、测量频率宽。
3)主要参数(1)灵敏度:输出量的变化与输入量变化的比值(2)安装方法与上限频率(3)前置放大器与下限频率(4)横向灵敏度(5)动态范围(6)环境影响程度1.1.2 磁电式速度计1)结构原理(1)组成:线圈、磁钢、顶杠、弹簧片、附件。
(2)原理:切割磁力线产生感生电动势(图示说明)。
2)特点a.只能测量质点振动b.可以做成相对和绝对两种(约20分钟) (约20分钟)c.输出幅度大d.输出阻抗低e.体积较压电式大1.1.3 拾振器的合理选择1)自振频率和工作频率的选择2)灵敏度的选择3)测量范围的选择4)测量内容的选择(本节无作业)【课堂教学小结】(3分钟)1、振动测量主要是根据振动类型正确选择拾振器;2、合理布置拾振器;3、准确分析测量结果。
(约12分钟)举例课程名称:安全环境监测技术7∙6测振仪的校准与标定1)标定内容X⑴拾振器灵敏度标定在振动台上进行,fW200Hz,a≤10g灵敏度Sv=U∕Xa=4π2f2A A为振幅读书;U为输出电压;f为频率(2)实验室条件下的二次标定2)频率特性的标定(1)频率响应:测频带(带宽)⑵谐振频率7.7振动允许标准(约20分钟)D人体允许振动标准(246页)人体可以通过各种感受器接收振动的信息,并通过大脑对振动作出相应的反应和判断。
根据振动对人影响的程度,可以建立振动的评价标准。
实验3 速度与加速度的测量
实验3 气轨测量速度和加速度[实验目的]1. 学习气轨和计时计数测速仪的使用。
2. 测量滑块的速度和加速度。
[实验仪器]气垫导轨、计时计数测速仪、游标卡尺。
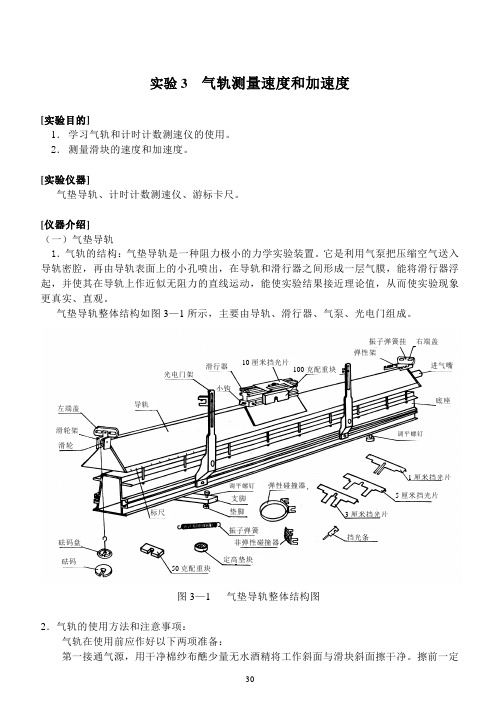
[仪器介绍](一)气垫导轨1.气轨的结构:气垫导轨是一种阻力极小的力学实验装置。
它是利用气泵把压缩空气送入导轨密腔,再由导轨表面上的小孔喷出,在导轨和滑行器之间形成一层气膜,能将滑行器浮起,并使其在导轨上作近似无阻力的直线运动,能使实验结果接近理论值,从而使实验现象更真实、直观。
气垫导轨整体结构如图3—1所示,主要由导轨、滑行器、气泵、光电门组成。
图3—1 气垫导轨整体结构图2.气轨的使用方法和注意事项:气轨在使用前应作好以下两项准备:第一接通气源,用干净棉纱布醮少量无水酒精将工作斜面与滑块斜面擦干净。
擦前一定左端盖 滑轮架 滑轮导轨光电门架滑行器10厘米挡光片100克配重块小钩标尺砝码盘 砝码50克配重块定高垫块非弹性碰撞器 振子弹簧垫脚 支脚弹性碰撞器挡光条3厘米挡光片 5厘米挡光片1厘米挡光片调平螺钉底座进气嘴 右端盖振子弹簧挂弹性架调平螺钉要先开气源,否则污秽容易把气轨堵住而使其无法正常工作。
第二要将气轨调平。
(1)静态调平:气轨通气后,将滑块置于气轨某处,用手轻轻压一下滑块,然后观察滑块的状态。
如果滑块往左运动,气轨左边低右边高,可调节调平螺钉,直到滑块保持不动或在小范围内来回滑动。
静态调平时,应把滑块放在气轨不同的位置上进行调平,直到满意为止。
(2)动态调平:在静态调平的基础上,将两光电门装在气轨中间地段,并使两者相距约50厘米;在滑块上装上1厘米开槽挡光片;按下计时计数测速仪的功能键,将其功能选择为计时2(S2)。
轻推滑块,注意滑块速度不宜太大(计时计数测速仪记录时间约为20 ms左右),滑块同方向经过两光电门的时间近似相等(两者相差不超过0.4ms),则认为气轨已调水平。
考虑到导轨的形变和粘滞阻力,静态调平与动态调平可重复进行。
振动测试方法
第4页/共13页
(5.19电涡流作用原理图 ) (5.21电涡流传感器系统)
第3页/共13页
传感器
传感器是能够感受物体运动并将物体运动转换为模拟电信号的一种灵敏的换能 元件。传感器的种类很多,而且有不同的分类方法,按坐标系的不同可分为绝对式 与相对式传感器;按工作方式的不同可分为接触式和非接触式传感器;按工作原理 的不同可分为惯性式和参数式传感器。按测量参数的不同又可分为位移、速度和加 速度传感器。这里我们仅简单讨论机械振动测量中常用的惯性式(磁电式)速度传 感器、压电式加速度传感器和电涡流位移传感器。 速度传感器
第2页/共13页
振动测试的力学原理
机械系统在外力作用下的运动称为该系统对此作用力的响应,此作用力称为激励力。 如图5.7和图5.10所示的单自由度振动系统,是从复杂振动系统中抽象出 来的一种简单力学模型。该系统的全部质量m〔kg〕集中在一点,并由一 个刚度为k〔N/m〕的弹簧和一个粘性阻尼系统为c〔N/ms-1〕的阻尼器支 撑。讨论中假设系统呈线性,系数m、k和c不随时间变化。
振动幅值是一般振动测量中最感兴趣的测试内容,它一般包括图5.26所示的四种情 况: (1)测量通频带幅值,即总值(Overall),一般早期的测振仪和振动检测仪表就 属于这一类
(2)测量基波频率的幅值,主要采用中心频率可调的带通滤波器,一般手动或自动 扫描式频谱分析仪就属于这一类。
(3)跟踪测量基波,或某一高次谐波频率的幅值,一般动平衡电测系统就是这一类, 主要采用自动跟踪带通滤波器。
浅谈振动监测诊断技术在设备维修中的运用
浅谈振动监测诊断技术在设备维修中的运用摘要:设备的状态监测与故障诊断是对设备进行“未病先防”的预防性诊断技术,本文论述了振动监测在设备维修中的运用方法,并提出了一些运用的建议。
关键词:设备维修振动监测诊断设备的状态监测与故障诊断是现代化设备维修技术的重要组成部分,是对设备进行“未病先防”的预防性诊断技术。
运用设备的状态监测与故障诊断方法可确保设备的安全,提高产品质量,节约维修费用以及防止环境污染。
1 设备振动监测诊断技术设备的状态监测和故障诊断方法主要有振动监测技术、油液分析技术、红外测温技术、声发射技术、无损检测技术等。
其中振动监测技术运用最广、最有效。
振动与机械故障之间是紧密相关的,设备在运转过程中会产生不同程度的振动,当振动幅度超过一定限度时会对设备造成损坏,严重的还会影响设备的运行安全,会引起设备运行状态的劣化,所以振动幅度必须控制在安全的范围之内。
设备在运行状况稳定时,具有一个典型的振级和频谱特征。
而当设备劣化时,振动信号中包含了系统、零部件由于磨损、疲劳、老化等因素引起的劣化和失效等重要信息,设备的振级和频谱特征会发生变化。
振动监测就是通过监测振动位移、速度、加速度等参数,将测得的数值与标准值进行对比分析,以判断设备的运行状况,并对设备的异常状况进行报警;故障诊断则是对监测到的数据进行处理、分析以判断设备的劣化趋势及可能发生的故障类型、位置和程度。
振动监测诊断技术主要有以下的优势:能迅速地对各种类型的设备进行振动测量,i\/J5lM据统计机械故障的90%可以从振动测量中检测出来,有关振动的理论比较成熟。
2 设备振动状态监测的关键步骤2.1 确定设备振动状态监测内容设备振动状态监测内容:(1)振动数据的测量;(2)判别设备运行状态;(3)设备运行状态趋势分析。
2.2 制定适合的监测方案2.2.1 振动测量参数的选择振动检测中位移、速度和加速度参数的选择方法如下。
(1)频率在10Hz以下,位移量较大的低频振动,选择位移为检测参数。
初中一年级物理实验测量速度与加速度的方法与实验
初中一年级物理实验测量速度与加速度的方法与实验物理实验是初中一年级学生探索自然规律、理解物理概念的重要手段之一。
在物理实验中,测量速度与加速度是基础性的内容之一。
本文将介绍初中一年级物理实验中测量速度与加速度的方法与实验。
一、实验目的本实验旨在通过测量物体的速度与加速度,帮助学生理解速度与加速度的概念,并掌握测量的方法。
二、实验仪器与工具1. 直尺:用于测量物体的位移;2. 秒表:用于测量时间;3. 铅笔与纸:用于记录实验数据。
三、实验内容1. 实验一:测量物体匀速运动的速度a. 准备一条直线轨道,长度约为1米,并将其固定在桌子上。
b. 选择一个小物体,例如小车或者小球,并将其放在轨道的起点处。
c. 在轨道的终点处设置一个终点线,标记为“终点”。
d. 用直尺测量物体在轨道上的起点和终点的位移,并记录下来。
e. 使用秒表计时,测量物体从起点到终点所用的时间,并记录下来。
f. 计算物体的速度,速度=位移/时间。
2. 实验二:测量物体匀变速运动的加速度a. 使用与实验一相同的直线轨道和物体。
b. 标记轨道上等距离的5个点,作为测速点。
c. 用直尺测量物体在每个测速点的位移,并记录下来。
d. 使用秒表计时,测量物体在每个测速点经过的时间,并记录下来。
e. 计算物体在每个测速点的速度,速度=位移/时间。
f. 根据测得的速度数据,绘制速度-时间图像,通过直线的斜率计算出加速度。
四、实验注意事项1. 确保实验仪器干净,以免影响测量结果。
2. 尽量保持物体运动平稳,减少因其他因素干扰所引起的误差。
3. 多次重复实验可以提高数据的准确性。
4. 注意安全,避免实验中发生意外情况。
五、实验结果与分析1. 实验一中,根据测量得到的位移和时间数据,计算出物体的速度。
通过多次实验,可以发现物体的速度保持恒定不变。
2. 实验二中,根据测量得到的位移和时间数据,计算出物体在不同测速点的速度。
根据速度-时间图像的斜率,可以计算出物体的加速度。
速度和加速度的测量

速度和加速度的测量【实验目的】1. 观察匀速直线运动,测量滑块的运动速度。
2. 学习使用气垫导轨和存储式数字毫秒计。
【实验仪器】气垫导轨、气源、存储式数字毫秒计、垫块。
【实验原理】1、测量滑块运动的瞬时速度V物体做直线运动时,其瞬时速度定义为: dt dS t S V t =∆∆=→∆lim 0 (1) 根据这个定义瞬时速度实际上是不可能测量的。
因为当∆t →0时,同时有∆S →0,测量上有具体困难。
我们只能取很小的∆t 及相应的∆S ,用其平均速度来代替瞬时速度V ,即tS V ∆∆=(2) 尽管像这样用平均速度代替瞬时速度会产生一定误差,但只要物体运动速度较大而加速度又不太大,这种误差也不会太大。
2、测量滑块运动的加速度a图1 滑块下滑示意图如图1所示,如果将气垫导轨的一端垫高,形成斜面,滑块下滑时将作匀变速直线运动,有三个基本运动公式:)(00t t a V V -=- (3))(20202s s a V V -=- (4)20000)(21)(t t a t t V s s -+-=- (5) 式中s 0和s 以及V 0和V 分别为t 0和t 时刻滑块的位置坐标和相应的瞬时速度。
在实验中使用的毫秒计只能从t 0=0时刻开始计时,所以运动方程变为:at V V =-0 (6)aS s s a V V 2)(20202=-=- (7)2021at t V S += (8) 此时t 为滑块从s 0处到s 处的运动时间, S =s -s 0为两光电门之间的距离。
实验时,使滑块由导轨最高端(或某一固定位置)静止自由下滑,即可测得不同位置s 0、s 1、s 2.....处各自相应的速度和加速度值,如图2-2。
图2 位置和速度对应图【实验仪器介绍】气垫导轨气垫导轨是一种现代化的力学实验仪器。
它利用小型气源将压缩空气送入导轨内腔。
空气再由导轨表面上的小孔中喷出,在导轨表面与滑行器内表面之间形成很薄的气垫层。
混凝土结构构件振动检测方法

混凝土结构构件振动检测方法一、前言混凝土结构构件振动检测是建筑结构安全性评估的重要手段之一,也是建筑结构设计和施工的关键环节之一。
本文将从振动检测的目的、方法、设备、数据处理等方面进行详细介绍,以期为相关人员提供参考。
二、振动检测的目的振动检测的主要目的是评估建筑结构的安全性能,判断结构的抗震性、抗风性、抗振性等。
同时,振动检测还可以帮助工程师了解结构的初始状态、施工过程中的变化、使用过程中的损伤程度等信息,为维护和修复结构提供依据。
三、振动检测的方法振动检测的方法通常包括现场振动测试和模拟计算两种。
1. 现场振动测试现场振动测试是指通过在建筑结构上安装振动传感器等设备,对结构在自然状况下或受到外力作用下的振动进行实时监测和记录,从而获取结构的振动参数和响应特性。
现场振动测试的具体步骤如下:(1)确定监测点位:根据结构的特点和监测目的,选择适当的监测点位,通常选择梁、柱、墙等主要构件节点处进行监测。
(2)布置振动传感器:按照设计要求和监测方案,在选定的监测点位上布置振动传感器,通常采用加速度计或速度计等传感器。
(3)采集数据:通过数据采集系统对振动传感器采集到的振动信号进行实时记录和存储,通常采用数据采集仪或计算机等设备。
(4)数据处理:将采集到的振动信号进行滤波、去噪、分析等处理,得出结构的振动参数和响应特性。
2. 模拟计算模拟计算是指通过有限元分析、模态分析等数值模拟方法,对建筑结构的振动进行计算和模拟,得出结构的振动参数和响应特性。
模拟计算的具体步骤如下:(1)建立结构模型:根据结构的实际情况和设计图纸,利用有限元软件等工具建立结构模型。
(2)求解结构振动特性:通过有限元分析、模态分析等方法,求解结构的振动特性参数,包括固有频率、阻尼比、振型等。
(3)分析振动响应:将结构受到的外力作用加入模型中,进行振动响应分析,得出结构的振动响应参数,包括加速度、位移、速度等。
四、振动检测的设备振动检测的设备主要包括振动传感器、数据采集仪、计算机等。
速度和加速度的测量实验研究

对实验设备进行定期标定 和校准,提高设备精度。
误差来源分析
01 提高实验操作人员的技能和素质,确保实验操作
的准确性和规范性。
02
采用更先进的数据处理方法和技术,提高数据处 理的精度和效率。
05
实验注意事项与安全规范
操作注意事项
在进行实验前,确保 已经充分了解实验步
骤和操作规程。
严格遵守实验室规定 ,禁止在实验室内吸 烟、饮食或进行与实
系统误差
由于实验设备、测量原理等引起的误差,如传感器精度、标定误差 等。
随机误差
由于实验过程中各种随机因素引起的误差,如环境温度、湿度变化 等。
人为误差
由于实验操作不当、数据处理不严谨等引起的误差,如读数误差、计 算错误等。
误差来源分析
为了减小误差,可以采取 以下措施
严格控制实验条件,如保 持恒定的环境温度和湿度 。
培养实验操作能力和数据处理能力,提高实验素 03 养。
实验原理
速度是描述物体运动快慢的物理量,等于物体在单位时间内通过的路程。在实验中 ,可以通过测量物体通过一定距离所需的时间来计算速度。
加速度是描述物体速度变化快慢的物理量,等于物体在单位时间内速度的变化量。 在实验中,可以通过测量物体在一段时间内速度的变化来计算加速度。
数据拟合
利用最小二乘法、多项式拟合等方法对数据进行拟合,得到速度 和加速度的变化规律。
结果展示与讨论
速度-时间曲线
绘制速度随时间变化的曲 线,观察速度的变化趋势 。
结果对比
将实验结果与理论值进行 对比,分析误差来源。
加速度-时间曲线
绘制加速度随时间变化的 曲线,分析加速度的变化 规律。
误差来源分析
02
基于冲击响应谱高速列车设备冲击环境特性分析
第53卷第5期2022年5月中南大学学报(自然科学版)Journal of Central South University (Science and Technology)V ol.53No.5May 2022基于冲击响应谱高速列车设备冲击环境特性分析豆硕,刘志明,王文静,李强,毛立勇(北京交通大学机械与电子控制工程学院,北京,100044)摘要:为准确描述列车设备受到的冲击环境,基于冲击响应谱模型将基础冲击加速度作用到一系列固有频率变化的单自由度系统上,采用系统的最大响应间接地描述冲击载荷。
首先,对半正弦、梯形、前峰锯齿和后峰锯齿等经典脉冲型冲击加速度进行响应谱分析;其次,对线路实测的高速列车车体、转向架和车轴装设备的加速度振动环境,与IEC61373规范对应的半正弦冲击加速度的响应谱进行对比;最后,提出一种冲击响应谱时域合成方法,通过优化小波的幅值和相位参数使合成的冲击加速度满足目标响应谱精度要求,并反映冲击环境的方向特征。
研究结果表明:脉冲型冲击加速度具有相同的响应谱特性,在低频区,加速度响应谱斜率为6dB/Oct ,速度响应谱为水平的恒速线;在高频区,正值和负值响应谱不等,在不同方向上具有不同的冲击效果;现有规范对于车体、转向架和车轴装设备存在低频过试验问题,转向架和车轴装设备同时存在高频欠试验问题,列车设备受到的均为对称冲击环境,脉冲型冲击加速度不能反映列车设备对冲击环境方向的要求;合成的冲击加速度能精确匹配目标响应谱,可以满足3dB 误差要求,更接近真实的冲击加速度瞬态波形。
关键词:高速列车设备;冲击环境;冲击响应谱;冲击加速度;时域合成中图分类号:U270.12文献标志码:A开放科学(资源服务)标识码(OSID)文章编号:1672-7207(2022)05-1843-12Analysis of shock environment characteristics of high-speed trainequipment based on shock response spectrumDOU Shuo,LIU Zhiming,WANG Wenjing,LI Qiang,MAO Liyong(School of Mechanical,Electronic and Control Engineering,Beijing Jiaotong University,Beijing 100044,China)Abstract:To accurately describe the shock environment of train equipment,the shock acceleration was applied to a number of single-degree-of-freedom (SDOF)systems with variation of natural frequency,and the maximum response of the SDOF systems was used to describe the shock load indirectly.Firstly,the shock response spectrum (SRS)characteristics of classical impulse accelerations were analyzed,such as half-sine,trapezoidal,initialpeak收稿日期:2021−09−08;修回日期:2021−12−05基金项目(Foundation item):国家自然科学基金资助项目(11790281);国铁集团科研计划课题资助项目(P2019J001)(Project(11790281)supported by the National Nature Science Foundation of China;Project(P2019J001)supported by China State Railway Group Co.,Ltd.)通信作者:刘志明,博士,教授,从事疲劳可靠性研究;E-mail:****************.cnDOI:10.11817/j.issn.1672-7207.2022.05.029引用格式:豆硕,刘志明,王文静,等.基于冲击响应谱高速列车设备冲击环境特性分析[J].中南大学学报(自然科学版),2022,53(5):1843−1854.Citation:DOU Shuo,LIU Zhiming,W ANG Wenjing,et al.Analysis of shock environment characteristics of high-speed train equipment based on shock response spectrum[J].Journal of Central South University(Science and Technology),2022,53(5):1843−1854.第53卷中南大学学报(自然科学版)sawtooth and final peak sawtooth shock pulse.Secondly,the acceleration response spectrum of high-speed train body,bogie and axle mounted equipment measured on the line were compared with that of the half sine shock acceleration corresponding to IEC61373specification.Finally,a time domain synthesis method of SRS was proposed by optimizing the amplitude and phase parameters of wavelet,which can satisfy the precision of target SRS and reflect the direction characteristics of shock environment.The results show that the acceleration shock pulses have the same response spectrum characteristics.In the low frequency range,the slope of the acceleration response spectrum is6dB/Oct,and the velocity response spectrum is horizontal constant speed line.In the high frequency region,the positive and negative response spectrums show that the acceleration shock pulses have obviously different shock effect in different directions.Moreover,the existing shock resistant specification for car body,bogie and axle mounted equipment have the problems of over test in the low frequency range,and bogie and axle mounted equipment have the problems of fewer test in the high frequency range.The high-speed train equipment is subjected to symmetric shock environment and the specifications can't meet the requirements of shock direction.The synthesized shock acceleration can accurately match the target response spectrum,meet the requirement of3dB error,and is closer to the real acceleration shock waveform.Key words:high-speed train equipment;shock environment;shock response spectrum;shock acceleration;time domain synthesis高速列车在全寿命服役周期中,除了受到正常工况下的稳态激励,还会经历复杂的冲击环境,如列车高速通过道岔、轨缝、变坡点等时会产生超常的冲击载荷,从而引起设备故障[1]。
振动检测基础知识

基频分量的幅值和相位
基频是转速频率,记作 1R。 基频分量的幅值与转子的不平衡大小有关。 基频分量的相位与不平衡在转子上的方位有 直接对应关系。 基频大小和相位由基频分析仪或频率分析方 法求得。
键相与相位参考脉冲
参考脉冲
K’ K
t 1转
在转子上刻印键相标记K ,在轴承座上布置键相传感器K (光电式或涡流式),其输出为相位参考脉冲。 参考脉冲是测量相位的基准。 参考脉冲也可用于测量转子的转速。
振动检测基础知识
工程技术领域中,振动现象也比比皆是。例如, 桥梁和建筑物在阵风或地震激励下的振动,飞机和 船舶在航行中的振动,机床和刀具在加工时的振动, 各种动力机械的振动,控制系统中的自激振动,等 等。
振动测量是指检测振动变化量,将其转换为与之 对应的,便于显示、分析和处理的电信号,并从中 提取所需的有用信息的测量技术。
xav
1 T
T
x dt
0
value)
均值 (Mean value)
x 1
T
x dt
T0
又称平均值或直流分量。
有效值 (Root mean square value) xrms
1 T x2 dt T0
简谐振动的幅值参数
平均绝对值
正峰值
有效值
峰峰值
平均值
负峰值
各幅值参数是常数,彼此间有确定关系
峰值 xp=A; 峰峰值 xp-p=2A
平均绝对值 xav=0.637A
有效值
xrms=0.707A
平均值
x0
复杂振动的幅值参数
峰峰值 正峰值 xrms
负峰值
各幅值参数随时间变化, 彼此间无明确定关系
常用的幅值参数及其单位
速度、加速度的测定和牛顿运动定律的验证实验报告课件.doc

中国石油大学(华东)现代远程教育实验报告课程名称:大学物理(一)实验名称:速度、加速度的测定和牛顿运动定律的验证实验形式:在线模拟+现场实践提交形式:在线提交实验报告学生姓名:学号:年级专业层次:网络18 春石油化工技术学习中心:提交时间:2018 年09 月22 日一、实验目的1.了解气垫导轨的构造和性能,熟悉气垫导轨的调节和使用方法。
2.了解光电计时系统的基本工作原理,学会用光电计时系统测量短暂时间的方法。
3.掌握在气垫导轨上测定速度、加速度的原理和方法。
4.从实验上验证F=ma的关系式,加深对牛顿第二定律的理解。
5.掌握验证物理规律的基本实验方法。
二、实验原理1.速度的测量一个作直线运动的物体,如果在t~t+Δt时间内通过的位移为Δx(x~x+Δx),则该物体在Δt时间内的平均速度为,Δt越小,平均速度就越接近于t时刻的实际速度。
当Δt→0时,平均速度的极限值就是t时刻(或x位置)的瞬时速度(1)实际测量中,计时装置不可能记下Δt→0的时间来,因而直接用式(1)测量某点的速度就难以实现。
但在一定误差范围内,只要取很小的位移Δx,测量对应时间间隔Δt,就可以用平均速度近似代替t时刻到达x点的瞬时速度。
本实验中取Δx为定值(约10mm),用光电计时系统测出通过Δx所需的极短时间Δt,较好地解决了瞬时速度的测量问题。
2.加速度的测量在气垫导轨上相距一定距离S的两个位置处各放置一个光电门,分别测出滑块经过这两个位置时的速度v1和v2。
对于匀加速直线运动问题,通过加速度、速度、位移及运动时间之间的关系,就可以实现加速度a的测量。
(1)由测量加速度在气垫导轨上滑块运动经过相隔一定距离的两个光电门时的速度分别为v1和v2,经过两个光电门之间的时间为t21,则加速度a为(2)根据式(2)即可计算出滑块的加速度。
(2)由测量加速度设v1和v2为滑块经过两个光电门的速度,S是两个光电门之间距离,则加速度a为(3)根据式(3)也可以计算出作匀加速直线运动滑块的加速度。
物理实验-测量速度和加速度

04
实验步骤
实验装置的搭建和调整
准备实验器材:光电门、滑 块、轨道、计时器等
调整实验参数:设置光电门 的触发阈值和计时器的时间 间隔
搭建实验装置:将光电门固 定在轨道两侧,调整滑块位 置
检查实验装置:确保滑块在 轨道上滑动顺畅,光电门能 够准确触发计时器
实验操作步骤和注意事项
准备实验器材: 刻度尺、秒表、 小车、细绳、
实验结果:速度 和加速度的数据 分布和变化趋势
结论:速度和加 速度之间的关系, 以及影响速度和 加速度的因素
06
实验总结与思考
实验过程中的问题和解决方法
解决方法:采用更精确的测量仪器和更科学的测量方法
解决方法:检查实验设备、实验环境和实验操作,确保实验条件的 一致性
解决方法:分析实验过程中的每一个步骤和细节,找出可能导致结 果无法重复的因素
木板等
调整实验环境: 确保实验环境 无风、无震动、
无干扰
测量小车的速 度:使用秒表 记录小车通过 两个标记点的 时间,计算速
度
测量小车的加 速度:使用秒 表记录小车通 过两个标记点 的时间,计算
加速度
注意事项:确 保实验器材的 准确性、实验 环境的稳定性、 实验操作的规
范性
数据记录和处理方法
记录实验数据:使用秒表或电子计时器记录时间,使用米尺或 激光测距仪测量距离。
结果展示:将计算得到的速度和加速度结果以图表形式展示, 以便于理解和分析。
05
实验结果分析
数据表格的整理和计算
整理数据:将 实验数据按照 时间、速度、 加速度等分类
整理
计算平均值: 计算每个数 据的平均值, 以便于分析
计算标准差: 计算每个数据 的标准差,以 便于判断数据
测试系统振动、加速度PPT课件

dt
2
加速度 a dv A 2 cos(t ) A 2 cos(t )
dt
振动位移、振动速度和振动加速度三者的幅值之间的关系与
频率有关。
1
第1页/共48页
振动测量系统
在低频振动场合,加速度的幅值不大,宜选用振动位移测量;
在中频振动场合,宜选择振动速度测量,在高频振动场合,加
2021/5/2
输出与位移(也即与加速度)成近似线性关系的电压,加
2021/5/2
速度方向改变时,输出电压的相位相应地改变180。。
26
第26页/共48页
位移式加速度传感器
电容式加速度传感器
以通过弹簧片支承的质量块作为差动电容器的活动极板, 并利用空气阻尼。
2021/5/2
特点:频率响应范围宽,测量范围大。
27
第27页/共48页
特点
压电式
5~105g
10-4~10-3g
10-2~105g
固有频率较高,用于冲击及 振动测量,大地测量及惯性 导航等
应变式
±0.5~ ±200g
低频响应较好,固有频率低, 适用于低频振动测量
压阻式
±20g~ 105g
灵敏度较高,便于集成化, 耐冲击,易受温度影响
微机电 式
±1g~ ±105g
10-6~10g
2021/5/2
12
第12页/共48页
213021/5/2
测振传感器
第13页/共48页
测振传感器
位移传感器的上限测量频率在理论上是无限的,但实 际上受具体仪器结构和元器件特性、后继放大电路频 响等条件的限制,不能太高。
下限测量频率则受弹性元件的强度和质量块尺寸、重 量等因素的限制,使n不能太小。
《大学物理(一)》实验报告(速度、加速度的测定和牛顿运动定律的验证)
中国石油大学(华东)现代远程教育实验报告课程名称:大学物理(一)实验名称:速度、加速度的测定和牛顿运动定律的验证实验形式:在线模拟+现场实践提交形式:在线提交实验报告学生姓名:学号:184**********年级专业层次:学习中心:山东济南明仁学习中心提交时间:2019 年月日一、实验目的1.了解气垫导轨的构造和性能,熟悉气垫导轨的调节和使用方法。
2.了解光电计时系统的基本工作原理,学会用光电计时系统测量短暂时间的方法。
3.掌握在气垫导轨上测定速度、加速度的原理和方法。
4.从实验上验证F=ma的关系式,加深对牛顿第二定律的理解。
5.掌握验证物理规律的基本实验方法。
二、实验原理1.速度的测量一个作直线运动的物体,如果在t~t+Δt时间内通过的位移为Δx(x~x+Δx),则该物体在Δt时间内的平均速度为,Δt越小,平均速度就越接近于t时刻的实际速度。
当Δt→0时,平均速度的极限值就是t时刻(或x位置)的瞬时速度(1)实际测量中,计时装置不可能记下Δt→0的时间来,因而直接用式(1)测量某点的速度就难以实现。
但在一定误差范围内,只要取很小的位移Δx,测量对应时间间隔Δt,就可以用平均速度近似代替t时刻到达x点的瞬时速度。
本实验中取Δx为定值(约10mm),用光电计时系统测出通过Δx所需的极短时间Δt,较好地解决了瞬时速度的测量问题。
2.加速度的测量在气垫导轨上相距一定距离S的两个位置处各放置一个光电门,分别测出滑块经过这两个位置时的速度v1和v2。
对于匀加速直线运动问题,通过加速度、速度、位移及运动时间之间的关系,就可以实现加速度a的测量。
(1)由测量加速度在气垫导轨上滑块运动经过相隔一定距离的两个光电门时的速度分别为v1和v2,经过两个光电门之间的时间为t21,则加速度a为(2)根据式(2)即可计算出滑块的加速度。
(2)由测量加速度设v1和v2为滑块经过两个光电门的速度,S是两个光电门之间距离,则加速度a为(3)根据式(3)也可以计算出作匀加速直线运动滑块的加速度。
如何测量速度和加速度:动态力学实验

便捷性增强
实验操作将更加 方便
智能化发展
实验设备更智能 化
精确性提升
未来实验将更加 精确
感谢聆听
感谢各位的聆听,希 望本次分享对大家有 所帮助。动态力学实 验是一个重要而复杂 的研究领域,希望通 过分享能够增加对此 领域的了解,并激发 更多人对于实验科学 的兴趣。
问答环节
01 接受问题提问
现场观众提出疑问
自由落体测量法
自由落体测量法通过测量物体的下落时间和下落 距离来计算加速度,适用于重力场下的加速度测 量,操作简单便捷。
旋转加速度测量法
01 角速度测量
测量物体的角速度
02 半径测量
测量物体旋转的半径
03 计算加速度
应用于圆周运动或转动运动
补充知识
重力加速度
地球表面的加速度约为 9.8m/s^2 用于多种加速度计算
速度
光电测速法
通过光电传感器检测物体通过光电 01 门的时间,计算物体通过的距离
适用于高速运动或者瞬间速度测量
02 精度
精确测量速度
03 适用情况
高速运动或者瞬间速度测量
高精度测速方法
使用激光测距仪
实现高精度测量
雷达测速仪
提供高精度速度数据
适用性
对速度要求较高的实验或 者工程中
总结
测量速度是动态力学实验中的重要一环,不同的 测速方法适用于不同情况,选择合适的测速方法 能够提高实验的准确性和可靠性。高精度的测速 方法可以满足对速度精度要求较高的实验需求, 是动态力学实验中不可或缺的手段。
加速度计类型
包括电容式、压电式等多 种类型 根据需求选择合适的加速 度计
应用领域
工程测量 运动分析 物理实验
3.7速度、加速度及振动检测(li)
转速测量-光电码盘 转速测量 光电码盘 A、B两个输出信号成 °相位差,而信号 对 、 两个输出信号成 两个输出信号成90°相位差,而信号Z对 每转一周只输出一个脉冲, 每转一周只输出一个脉冲,作为决定转角的原 点。
f .L v= N
f—脉冲发生器的频率 脉冲发生器的频率
(三)转速传感器
转速传感器是将旋转物体的转速转换为电量输出的传感 转速传感器属于间接式测量装置,可用机械、电气、 器。转速传感器属于间接式测量装置,可用机械、电气、 光和混合式等方法制造。按信号形式的不同, 磁、光和混合式等方法制造。按信号形式的不同,转速 传感器可分为模拟式和数字式两种。 传感器可分为模拟式和数字式两种。 常用的转速传感器有光电式、电容式、变磁阻式、 常用的转速传感器有光电式、电容式、变磁阻式、频闪 测速仪、离心式、磁性式以及测速发电机等。 测速仪、离心式、磁性式以及测速发电机等。
(2)加速度积分法和位移微分法 ) (3)线速度和角速度相互转换法 ) (4)利用各种速度传感器, )
基于同一运动体上线位移和角位移在有固定关系原理。 基于同一运动体上线位移和角位移在有固定关系原理。 将速度信号变换为电信号、光信号等易测信号。 将速度信号变换为电信号、光信号等易测信号。速度传感器法是 最常用的一种方法。多普勒测速仪、磁电速度传感器等。 最常用的一种方法。多普勒测速仪、磁电速度传感器等。
3.7.2 速度的检测
磁电式速度传感器 光束切断法测速仪 转速传感器
(一)磁电式速度传感器
其工作原理基于电磁感应定理
当一线圈作直线运动或旋转运动时, 当一线圈作直线运动或旋转运动时,穿过其的磁通会发 生变化,产生感应电动势, 生变化,产生感应电动势,电动势输出与线圈运动速度 成正比。 成正比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2)数字式转速传感器
在电子计数器采样时间内对转速传感器输出的电脉冲信 号进行计数,利用标准时间控制计数器闸门。当计数器 的显示值为N时,被测量的转速n为
n 60 60N f z zt .
z为被测旋转体每转一转传感器发出的电脉冲信号数;t为采样时间。
数字式转速传感器其 功能是把被测转速转 换成脉冲信号,并且 能够推动计数器计数。 常见的测数传感器按 其作用原理可以分为 光电式、磁电式、电 容式、霍尔式、电涡 流式等等。
受迫振动:由于外界持续干扰引起和维持的振动,此时系 统的振动频率为激振频率; 自激振动:指系统在输入和输出之间具有反馈特性时,在 一定条件下,没有外部激振力而由系统本身产生的交变 力激发和维持的一种稳定的周期性振动,其振动频率接 近于系统的固有频率
2)按振动的规律分: 简谐振动:振动量为时间的正弦或余弦函数,为 最简单、最基本的机械振动形式。其他复杂的 振动都可以看成许多或无穷个简谐振动的合成。 周期振动:振动量为时间的周期性函数,可展开 为一系列的简谐振动的叠加。 瞬态振动:振动量为时间的非周期函数,一般在 较短的时间内存在。 随机振动:振动量不是时间的确定函数,只能用 概率统计的方法来研究。
2、振动测量方法
按振动信号转换的方式可分为电测法、机械法和光学法。 目前电测法是常用的方法,电测法将被测对象的振动量转换成电 量,然后用电量测试仪器进行测量。用电测法测量振动的装置成 为振动传感器。 振动传感器按工作原理不同有压电式、应变式、磁电式、电容式、 电涡流式等; 按测试参考坐标有相对振动传感器和绝对振动传感器,绝对振动 传感器是以大地为参考基准,相对振动传感器是以空间的一点为 参考点; 按被测振动参数分有振动位移传感器、振动速度传感器、振动加 速度传感器。 按传感器放置位置有接触式和非接触式之分,接触式中有磁电式、 电感式、压电式等;非接触式中又有电涡流式、电容式、霍尔式、 光电式等。
循环编码 作用:消除非线性单值误差,减 少误码率
方法:任意相邻两个代码之间只 有一位编码变化
转速测量-光电码盘
增量光电码盘
增量光电码盘是随旋转角度输出一列连续脉冲的 码盘,通过累计脉冲个数测量旋转角,若只使 用一个光电耦合器则只能检测转速,不能检测 转轴的绝对转角和转向。
特点:原理构造简单、寿命长,抗干扰能力强, 可靠性高,适合远距离传输。
另一类是通过振动实验对机械设备或结构施加某种激励, 测量其受迫振动,以便求得被测对象的振动力学参量或 动态性能,如固有频率、阻尼、刚度、频率响应和模态 等,验证理论分析的正确性,以便改进结构设计,提高 抗振能力。
(一)振动的分类
1)按振动产生的原因分:
自由振动:是系统受初始干扰或外部激振力取消后,系统 本身由弹性恢复力和惯性力来维持的振动。当系统无阻 尼时,振动频率为系统的固有频率;当系统存在阻尼时, 其振动幅度将逐渐减弱。
转速测量-光电码盘
绝对光电码盘及其编码方式
绝对光电码盘是把旋转轴的旋转角度用二进制编 码输出,它可以检测绝对角度,并且当有外部 干扰或电源断电事故发生后恢复正常时,可以 立即准确检测位置信息。
缺点:结构复杂,成本高、并需要多个光电元件 检测来自各位的脉冲信号。
转速测量-光电码盘
二进制编码
(三)电阻应变式加速度传感器
(四)差动变压器式加速度传感器
(五)霍尔式加速度传感器
3.7.4 机械振动的检测
机械振动测试目的:
一类是测量机械设备或结构在工作状态下的振动,如振 动位移、速度、加速度、频率和相位等,了解被测对象 的振动状态,评定等级和寻找振源,对设备或结构健康 状况进行监测、分析、诊断和预测。
3.7.2 速度的检测
磁电式速度传感器
光束切断法测速仪 转速传感器
(一)磁电式速度传感器
其工作原理基于电磁感应定理
当一线圈作直线运动或旋转运动时,穿过其的磁通会发 生变化,产生感应电动势,电动势输出与线圈运动速度 成正比。
dx e Bl Blv dt
eB S
d B l dt
光电式转速传感器-光电码盘
分为投射式和反射式两类。
光电码盘和透射型光电耦合器相结合,可对转速进行计 数,输出信号对应于码盘窗口明暗的脉冲序列。 工作时,码盘的一侧放置光 源,另一侧放置光敏器件, 每个数位都对应一个光电管 及放大、整形电路,码盘转 动不同位置,光电元件接收 相应的光信号,并转换为数 码电信号输出。
采用这种脉冲宽度调制精度伺服技术,动极板和定极板 间的间距可以做到小于1m,使传感器具有很高的灵 敏度,因而这种传感器的特点是能够测量低频微弱加速 度,由于这种传感器具有很高的精度,极好的线性和稳 定性,通常用于惯性导航以及如汽车安全气囊,ABS 系统控制等。
(二)压电式加速度传感器
S是弹簧,M是质块,B是基座,P是压电元件,R是夹 持环。 在加速度计感受振动时,由弹簧压紧在压电元件上的重 金属质量块随之振动,其方向与振动加速度方向相反, 产生一惯性力,其大小由F=ma决定。惯性力作用在 压电元件产生电荷,电荷量正比于惯性力,亦即与被测 加速度成正比,经测量电路转换为电压信号输出。
转速测量-光电码盘
A、B两个输出信号成90°相位差,而信号Z对 每转一周只输出一个脉冲,作为决定转角的原 点。
反射式光电传感器:在被 测转轴上设有反射记号, 由光源发出的光线通过透 镜和半透膜入射到被测转 轴上。转轴转动时,反射 记号对投射光点的反射率 发生变化。反射率变大时, 反射光线经透镜投射到光 敏元件上即发出一个脉冲 信号;反射率变小时,光 敏元件无信号。在一定时 间内对信号计数便可测出 转轴的转速值。
(三)振动
1、振动的概念 机械振动是物体在其平衡位置附近所作的 周期性往复运动。 振动是自然界中常见的物理现象,振动试验和 监测是研究和解决工程实际技术问题的重要手 段。如机械设备振动、土木结构振动、运输工 具振动、武器、爆炸引起的冲击振动等。 按振动的频率范围分:有高频振动、低频振动 和超低频振动等。 从振动信号的统计特征来看,可将振动分为周 期振动、非周期振动以及随机振动等。
(1)离心式转速表
离心式转速表属于机械式转速表中的代表种类,特别是 手持式离心转速表,在转速表的使用者中有着较高的认 同度。目前,离心式转速表被广泛的应用在各行各业, 如电机、洗衣机、汽车、轮船和飞机等制造行业。 离心式转速表的优点是,对测量结果的指示直观,运行 可靠、坚固耐用。 离心式转速表的缺点是,其本身的测量原理简单,测量 精度相对较低,一般测量精度是在1到2级,且离心式 转速表的结构比较复杂,不利于制造和维修。
通过测量加速度来测量物体的运动状态,加速度测量广 泛应用于航天、航空和航海的惯性导航系统及运载武器 的制导系统中。2、常用的速度测量方法(1)平均速度法
根据速度的定义,速度可以通过物体在一定时间内移动的距离求 得,这种方法只能求平均速度,距离越小,越接近瞬时速度。如 光束切断法、相关测速法、空间滤波器测速法等。 利用速度与加速度、位移的微分和积分关系,测得运动体的运动 速度,在振动测量中常用方法。
(4)磁阻式转速传感器
采用电磁感应原理实 现测速,在传感器前 端绕有线圈,当齿轮 旋转时,传感器磁路 的磁阻交替变化,通 过线圈的磁力线周期 性变化,在传感器线 圈中产生周期性的脉 冲电压信号,通过对 该脉冲电压信号处理 计数,就能测出齿轮 的转速。
(5)电容式速度传感器
齿轮外沿面为电容器的 动极板,当电容器定极 板与齿顶相对时,电容 量最大,而与齿隙相对 电容量最小。当齿轮转 动时,电容量发生周期 性变化.通过测量电路 转换为脉冲信号,设频 率计显示为f,则 n=60f/z
(6)霍尔式转速传感器
由传感头和齿圈组成。传感头由永磁体,霍尔元件和 电子电路等组成。
永磁体的磁力 线穿过霍尔元 件通向齿轮。 当齿圈的齿准 霍尔元件时, 磁力线集中穿 过霍尔元件, 可产生较大的 霍尔电动势,
放大、整形后输出高电平;反之,当齿轮的空隙对准霍尔元件时, 输出为低电平,对霍尔器件输出信号进行放大、整形,输出稳定 的方波脉冲信号,对脉冲信号计数即可测出转速。
磁电式速度计
在测振时,传感器固定或紧压于被测系统,磁钢与壳体 一起随被测系统的振动而振动,装在芯杆上的线圈和阻 尼环组成惯性系统的质量块并在磁场中运动,其输出电 压与线圈切割磁力线的速度成正比。阻尼环一方面可增 加惯性系统质量,降低固有频率,另一方面在磁场中运 动产生的阻尼力使振动系统具有合理的阻尼。
基于同一运动体上线位移和角位移在有固定关系原理。
(2)加速度积分法和位移微分法
(3)线速度和角速度相互转换法
(4)利用各种速度传感器,
将速度信号变换为电信号、光信号等易测信号。速度传感器法是 最常用的一种方法。多普勒测速仪、磁电速度传感器等。
加速度测量是基于传感器内质量体敏感于加速 度而产生惯性力原理,是一种全自主的惯性测 量。 加速度的测量主要是通过加速度传感器进行的, 依据产生的惯性力的原理不同分,加速度传感 器分为压电式、压阻式、应变式、电容式、振 梁式、磁电感应式、隧道电流式、热电式等。
f .L v N
f—脉冲发生器的频率
(三)转速传感器
转速传感器是将旋转物体的转速转换为电量输出的传感 器。转速传感器属于间接式测量装置,可用机械、电气、 磁、光和混合式等方法制造。按信号形式的不同,转速 传感器可分为模拟式和数字式两种。
常用的转速传感器有光电式、电容式、变磁阻式、频闪 测速仪、离心式、磁性式以及测速发电机等。
3.7 速度、加速度及振动检测
速度、加速度及振动是物体机械运动测量的三 种重要参数,是工业生产和日常生活中极为常见的物 理量,主要应用于交通汽车、工业生产、航空航天三