项目调度问题的一些matlab开发的工具箱
MATLAB工具箱介绍.
MATLAB工具箱介绍软件Matlab由美国MathWorks, Inc.公司出品,它的前身是C1eveMoler教授(现为美国工程院院士,Mathworks公司首席科学家)为著名的数学软件包LINPACK和EISPACK所写的一个接口程序。
经过近20年的发展,目前Matlab已经发展成一个系列产品,包括它的内核及多个可供选择的工具箱。
Matlab的工具箱数目不断增加,功能不断改善,这里简要介绍其中的几个。
MATLAB 的M文件、工具箱索引和网上资源,可以从处查找。
(1)通讯工具箱 (Communication ToolboX)★提供100多个函数及150多个SIMULINK模块,用于系统的仿真和分析★可由结构图直接生成可应用的C语言源代码(2)控制系统工具箱 (Control System Too1box)★连续系统设计和离散系统设计★状态空间和传递函数★模型转换★频域响应:Bode图、Nyquist图、Nichols图★时域响应:冲击响应、阶跃响应、斜波响应等★根轨迹、极点配置、LQG(3)金融工具箱 (Financial Loo1boX)★成本、利润分析,市场灵敏度分析★业务量分析及优化★偏差分析★资金流量估算★财务报表(4)频率域系统辨识工具箱 (Frequency Domain System Identification Toolbox) ★辨识具有未知延迟的连续和离散系统★计算幅值/相位、零点/极点的置信区间★设计周期激励信号、最小峰值、最优能量谱等(5)模糊逻辑工具箱 (Fuzzy Logic Too1box)★友好的交互设计界面★自适应神经—模糊学习、聚类以及Sugeno推理★支持SIMULINK动态仿真★可生成C语言源代码用于实时应用(6)高阶谱分析工具箱 (Higher—Order Spectral Analysis Toolbox)★高阶谱估计★信号中非线性特征的检测和刻划★延时估计★幅值和相位重构★阵列信号处理★谐波重构(7)图像处理工具箱 (Image Processing Toolbox)★二维滤波器设计和滤波★图像恢复增强★色彩、集合及形态操作★二维变换★图像分析和统计(8)线性矩阵不等式控制工具箱 (LMI Control Too1boX)★LMI的基本用途★基于GUI的LMI编辑器★LMI问题的有效解法★LMI问题解决方案(9)模型预测控制工具箱 (Model Predictive Contro1 Too1box)★建模、辨识及验证★支持MISO模型和MIMO模型★阶跃响应和状态空间模型(10) μ分析与综合工具箱 (μ- Analysis and Synthesis Too1box) ★ μ分析与综合★H2和H∞最优综合★模型降阶★连续和离散系统★μ分析与综合理论(11)神经网络工具箱 (Neural Network Toolbox for MATLAB)★BP,Hopfield,Kohonen、自组织、径向基函数等网络★竞争、线性、Sigmoidal等传递函数★前馈、递归等网络结构★性能分析及反应(12)优化工具箱 (Optimization Too1box)★线性规划和二次规划★求函数的最大值和最小值★多目标优化★约束条件下的优化★非线性方程求解(13)偏微分方程工具箱 (Partial Differential Equation Toolbox) ★二维偏微方程的图形处理★几何表示★自适应曲面绘制★有限元方法(14)鲁捧控制工具箱 (Robust Contro1 Too1box)★LQG/LTR最优综合★H2和H∞最优综合★奇异值模型降阶★谱分解和建模(15)信号处理工具箱 (Signal Processing ToolboX)★数字和模拟滤波器设计、应用及仿真★谱分析和估计★FFT,DCT等变换★参数化模型(16)样条工具箱 (Spline Too1box)★分段多项式和B样条★样条的构造★曲线拟合及平滑★函数微分、积分(17)统计工具箱 (Statistics Too1box)★概率分布和随机数生成★多变量分析★回归分析★主元分析★假设检验(18)符号数学工具箱 (Symbolic Math Too1box) ★符号表达式和符号短阵的创建★符号微积分、线性代数、方程求解★因式分解、展开和简化★符号函数的二维图形★图形化函数计算器(19)系统辨识工具箱 (System Identification Toolbox) ★状态空间和传递函数模型★模型验证★ MA,AR,ARMA等★基于模型的信号处理★谱分析(20)小波工具箱 (WaveLab)★基于小波的分析和综合★图形界面和命令行接口★连续和离散小波变换及小波包★一维、二维小波★自适应去噪和压缩。
(整理)matlab部分工具箱.
(整理)matlab部分工具箱.1)通讯工具箱(Communication Toolbox)。
令提供100多个函数和150多个SIMULINK模块用于通讯系统的仿真和分析——信号编码——调制解调——滤波器和均衡器设计——通道模型——同步可由结构图直接生成可应用的C语言源代码。
2)控制系统工具箱(Control System Toolbox)。
鲁连续系统设计和离散系统设计* 状态空间和传递函数* 模型转换* 频域响应:Bode图、Nyquist图、Nichols图* 时域响应:冲击响应、阶跃响应、斜波响应等* 根轨迹、极点配置、LQG3)财政金融工具箱(FinancialTooLbox)。
* 成本、利润分析,市场灵敏度分析* 业务量分析及优化* 偏差分析* 资金流量估算* 财务报表4)频率域系统辨识工具箱(Frequency Domain System ldentification Toolbox* 辨识具有未知延迟的连续和离散系统* 计算幅值/相位、零点/极点的置信区间* 设计周期激励信号、最小峰值、最优能量诺等5)模糊逻辑工具箱(Fuzzy Logic Toolbox)。
* 友好的交互设计界面* 自适应神经—模糊学习、聚类以及Sugeno推理* 支持SIMULINK动态仿真* 可生成C语言源代码用于实时应用(6)高阶谱分析工具箱(Higher—Order SpectralAnalysis Toolbox * 高阶谱估计* 信号中非线性特征的检测和刻画* 延时估计* 幅值和相位重构* 阵列信号处理* 谐波重构(7)图像处理工具箱(Image Processing T oolbox)。
* 二维滤波器设计和滤波* 图像恢复增强* 色彩、集合及形态操作* 二维变换* 图像分析和统计(8)线性矩阵不等式控制工具箱(LMI Control Toolbox)。
* LMI的基本用途* 基于GUI的LMI编辑器* LMI问题的有效解法* LMI问题解决方案(9)模型预测控制工具箱(ModelPredictive Control Toolbox* 建模、辨识及验证* 支持MISO模型和MIMO模型* 阶跃响应和状态空间模型(10)u分析与综合工具箱(u-Analysis and Synthesis Toolbox)* u分析与综合* H2和H无穷大最优综合* 模型降阶* 连续和离散系统* u分析与综合理论(11)神经网络工具箱(Neursl Network T oolbox)。
matlab各种应用工具箱参考
2021/3/10
讲解:XX
11
二、通用工具箱
• Matlab主工具箱
• 前面课程所介绍的数值计算、符号运算、 绘图以及句柄绘图都是matlab主工具箱 的内容,是matlab的基本部分,也是我 们课程的重点。
• Matlab主工具箱位于:
c:\matlab\toolbox\matlab
• matlab主工具箱是任何版本的matlab都
simulink 的一般结构:
输入
系统
输出
2021/3/10
讲解:XX
27
仿真原理
• 当在框图视窗中进行仿真的同时,matlab 实际上是运行保存于simulink内存中s函数 的映象文件,而不是解释运行该m文件。
• s函数并不是标准m文件,它m文件的一种 特殊形式。
结构图创建方法
• 一个动态系统的创建过程,就是一个方框 图的绘制过程
rose - Angle histogram plot.
compass - Compass plot.
feather - Feather plot.
fplot - Plot function.
comet - Comet-like trajectory.
2021/3/10
讲解:XX
17
Graph annotation. title - Graph title. xlabel - X-axis label. ylabel - Y-axis label. text - Text annotation. gtext - Mouse placement of text. grid - Grid lines.
高阶谱分析工具箱
2021/3/10
项目调度问题的一些matlab开发的工具箱

项目调度问题的一些matlab开发的工具箱Matlab鲁棒控制工具箱(Robust Control Toolbox)目录一、引言 21、工具箱函数简介 21)不确定元素 22)不确定矩阵和系统 23)不确定模型的控制 34)不确定模型间的互连 35)模型降阶 36)鲁棒性和最坏情况分析 47)参数依赖系统的鲁棒性分析 48)控制器综合 49)μ综合 510)采样系统 511)增益调度 512)频域响应模型 513)公用函数 614)LMI函数 615)LMI特征 616)LMI求解 617)结果验证 618)修改LMI对象 72、不确定性建模 73、最坏情况下的性能分析 94、MIMO系统的鲁棒控制器设计 115、模型降阶及逼近 136、作者简介 167、参考文献 17代码1 ACC Benchmark Problem 18 代码2 NASA HiMAT 18二、多变量回路成形设计 19三、模型降阶 201、Hankel奇异值 202、加性误差方法和乘性误差方法 223、modreal函数 264、ncfmr函数 285、参考文献 30四、鲁棒性分析 301、不确定性建模 302、鲁棒性分析 343、MIMO系统的鲁棒性分析 384、最坏情况下增益分析 43Matlab鲁棒控制工具箱(Robust Control Toolbox)鲁棒控制工具箱提供了一系列的函数和工具以支持带有不确定元素的多输入多输出控制系统的设计。
在该工具箱的帮助下,你可以建立带有不确定参数和动态特性的LTI模型,也可以分析MIMO系统的稳定性裕度和最坏情况下的性能。
该工具箱提供了一系列的控制器分析和综合函数,能够分析最坏情况下的性能及确定最坏情况下的参数值。
利用模型降阶函数能够对复杂模型进行简化。
同时提供了先进的鲁棒控制方法,如H2、H∞、LMI、μ分析等。
一、引言1、工具箱函数简介1)不确定元素ucomplex 创建不确定复数参量ucomplexm 创建不确定复数矩阵udyn 创建未定义结构的不确定动态系统对象ultidyn 创建线性时不变不确定性对象ureal 创建不确定实数参量2)不确定矩阵和系统diag 对不确定矩阵和系统对角化randatom 创建随机不确定性atom对象randumat 创建随机不确定性矩阵randuss 创建随机不确定性状态空间模型ufrd 创建不确定性频域响应数据对象(ufrd),或者将其它模型转换为ufrd对象umat 创建不确定性矩阵uss 定义不确定性状态空间模型,或者将LTI对象转换为不确定性状态空间模型rss 创建随机稳定连续时间状态空间模型3)不确定模型的控制actual2normalized 对于给定的atom对象,计算其与标准值间的归一化距离gridureal 将ureal对象均匀网格化isuncertain 判断是否为不确定性系统lftdata 将不确定对象分解为固定的规范型和固定的不确定性部分normalized2actual 将正规化坐标系中的atom值转换为实际值repmat 复制和命名不确定矩阵simplify 简化不确定对象的表达式squeeze 将umat对象去掉一维usample 产生随机不确定对象usubs 替换不确定对象中的不确定参数uss/ssbal 将不确定系统中的状态/不确定性标量化4)不确定模型间的互连iconnect 创建空白的互连对象icsignal 创建icsignal对象imp2exp 将线性关系转换为输入-输出关系stack 将不确定矩阵、模型或者数组压入堆中sysic 互连确定与不确定矩阵或系统5)模型降阶balancmr 利用均方根法求降阶模型bstmr 利用Schur法求随机模型的降阶模型hankelmr 为降阶前的最小Hankel测度hankelsv 计算稳定/不稳定系统、连续/离散系统的Hankel奇异值imp2ss 将脉冲响应模型转换为近似状态空间模型modreal 模态形式的实现ncfmr 归一化的互质降阶模型reduce 利用Hankel奇异值法降阶schurmr 利用Schur法求降阶模型slowfast 将状态空间模型按照快-慢原则分解stabsep 将状态空间模型按照稳定/不稳定原则分解6)鲁棒性和最坏情况分析cpmargin 计算包含反馈控制器的闭环系统的稳定性裕度gapmetric 计算两个系统间的gap、nugap距离上限loopmargin 分析反馈回路loosens 分析包含反馈控制器的闭环系统的灵敏度mussv 计算所构造的奇异值(μ)的界限mussvextract 从mussv创建的数据结构中提出muinfo对象ncfmargin 计算反馈回路的归一化稳定性裕度popov 执行Popov鲁棒性检验robopt 创建可供robuststab和robustperf选择的对象robustperf 计算不确定多变量系统的鲁棒性能裕度robuststab 计算不确定多变量系统的鲁棒稳定性裕度wcgain 计算不确定系统的最坏情况下的增益界限wcgopt 创建可供wcgain、wcsens和wcmargin使用的对象wcmargin 计算最坏情况下反馈系统的增益/幅值裕度wcnorm 计算最坏情况下不确定矩阵的范数wcsens 计算最坏情况下反馈回路的灵敏度和补灵敏度函数7)参数依赖系统的鲁棒性分析aff2pol 将仿射参数依赖系统(Parameter-Dependent Systems,P-系统)转换为多胞模型decay 多胞模型或者P-系统的二次衰减速率ispsys 是否为P-系统pdlstab 评估多胞模型或者P-系统的鲁棒稳定性pdsimul P-系统沿参数变化轨迹的时域响应polydec 计算多胞坐标psinfo 多胞模型或者P-系统的设置参数psys 设置线性的多胞或者参数依赖系统pvec 设置不确定性向量或者时变参数pvinfo 参数向量的参数quadperf 计算多胞模型或者P-系统的二次型H∞指标guadstab 评估多胞模型或者P-系统的二次型稳定性8)控制器综合augw 为加权混合灵敏度回路成形设计创建增广系统模型h2hinfsyn 极点配置约束下的混合H2/H∞设计h2syn 针对LTI模型设计H2控制器hinfsyn 针对LTI模型设计H∞最优控制器loopsyn H∞回路成形控制器设计ltrsyn LQG回路传递函数恢复控制器设计mkfilter 创建Bessel,Butterworth,Chebyshev,RC滤波器mixsyn H∞混合灵敏度控制器设计ncfsyn H∞归一化互质因子控制器设计sigma 画出LTI反馈回路的奇异值makeweight H∞混合灵敏度中的权重(mixsyn,augw)9)μ综合cmsclsyn 常值矩阵μ综合dksyn 利用μ综合D-K迭代法进行鲁棒控制器设计dkitopt 创建供dksyn使用的对象drawmag 鼠标交互操作函数fitfrd 针对状态空间模型,合理化D标度的频域响应fitmagfrd 针对稳定、最小相位的状态空间模型,合理化标量幅值数据genphase 针对单输入单输出、实有理、最小相位传递函数,合理化的幅值响应数据10)采样系统sdhinfnorm 计算采样系统的L2范数sdhinfsyn 采样系统的H∞控制器设计sdlsim 带有反馈回路的采样系统的时域响应11)增益调度hinfgs 增益调度H∞控制器设计12)频域响应模型frd/loglog frd对象的log-log度量frd/semilogx frd对象的半对数(semilog)度量frd/rcond frd对象的互逆条件判断frd/schur frd对象的Schur分解frd/svd frd对象的奇异值分解13)公用函数bilin 多变量频域双线性变换(s域、z域)dmplot 对增益和相位裕度进行说明mktito 将LTI系统分解为两输入-两输出系统sectf 状态空间模型的双线性变换skewdec 创建反对称矩阵symdec 创建对称矩阵14)LMI函数getlmis LMI系统的内部描述lmiedit 用matlab语言编辑或显示LMI系统lmiterm 增加新项给现有的LMI对象lmivar 在现有的LMI系统中设定矩阵变量newlmi 增加新的LMI对象给现有的LMI系统setlmis 初始化LMI系统15)LMI特征dec2mat 从决策变量向量中提取出矩阵值decinfo 描述矩阵变量和决策变量中的联系decnbr LMI系统中的决策变量个数lmiinfo 现有LMI对象的信息lminbr LMI系统中的LMI对象的个数mat2dec 从矩阵中提取决策变量向量matnbr LMI系统中矩阵变量的个数16)LMI求解defcx 为mincx对象设定cTx对象feasp 求解给定的LMI系统gevp LMI约束下的广义特征值mincx LMI约束下最小化线性对象17)结果验证evallmi 针对给定的决策变量评估LMIshowlmi 待评估LMI对象的左边项和右边项18)修改LMI对象dellmi 从现有LMI系统中移除LMI对象delmvar 从带求解的LMI问题中移除矩阵变量setmvar 举例矩阵变量和待评估的LMI项2、不确定性建模鲁棒控制的核心是对不确定LTI系统的建模。
MATLAB工具箱介绍
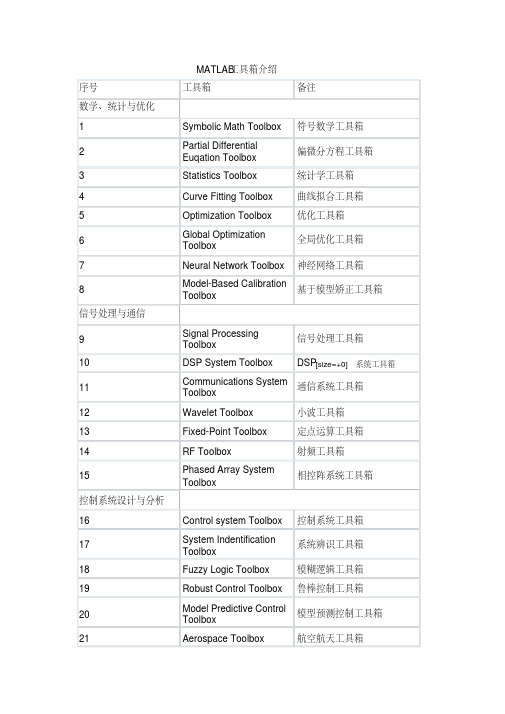
MATLAB工具箱介绍序号工具箱备注数学、统计与优化1Symbolic Math Toolbox符号数学工具箱2Partial DifferentialEuqation Toolbox偏微分方程工具箱3Statistics Toolbox统计学工具箱4Curve Fitting Toolbox曲线拟合工具箱5Optimization Toolbox优化工具箱6Global OptimizationToolbox全局优化工具箱7Neural Network Toolbox神经网络工具箱8Model-Based CalibrationToolbox基于模型矫正工具箱信号处理与通信9Signal ProcessingToolbox信号处理工具箱10DSP System Toolbox DSP[size=+0]系统工具箱11Communications SystemToolbox通信系统工具箱12Wavelet Toolbox小波工具箱13Fixed-Point Toolbox定点运算工具箱14RF Toolbox射频工具箱15Phased Array SystemToolbox相控阵系统工具箱控制系统设计与分析16Control system Toolbox控制系统工具箱17System IndentificationToolbox系统辨识工具箱18Fuzzy Logic Toolbox模糊逻辑工具箱19Robust Control Toolbox鲁棒控制工具箱20Model Predictive ControlToolbox模型预测控制工具箱21Aerospace Toolbox航空航天工具箱图像处理与计算机视觉22Image ProcessingToolbox图像处理工具箱23Computer Vision SystemToolbox计算机视觉工具箱24Image AcquisitionToolbox图像采集工具箱25Mapping Toolbox地图工具箱测试与测量26Data Acquisition Toolbox数据采集工具箱27Instrument ControlToolbox仪表控制工具箱28Image AcquisitionToolbox图像采集工具箱29OPC Toolbox OPC[size=+0]开发工具30Vehicle Network Toolbox车载网络工具箱计算金融31Financial Toolbox金融工具箱32Econometrics Toolbox计算经济学工具箱33Datafeed Toolbox数据输入工具箱34Fixed-Income Toolbox固定收益工具箱35Financial DerivativesToolbox衍生金融工具箱计算生物33Bioinformatics Toolbox生物信息工具箱34SimBiology生物学工具箱并行计算35Parallel ComputingToolbox并行计算工具箱36MATLAB DistributedComputing ServerMATLAB[size=+0]分布式计算服务器数据库访问与报告37Database Toolbox数据库工具箱。
第七讲 Matlab工具箱
31
Specialized X-Y graphs. polar - Polar coordinate plot. bar - Bar graph. stem - Discrete sequence or "stem" plot. stairs - Stairstep plot. errorbar - Error bar plot. hist - Histogram plot. rose - Angle histogram plot. compass - Compass plot. feather - Feather plot. fplot - Plot function. comet - Comet-like trajectory.
学科前沿最新的工具箱(三)
遗传算法工具箱
遗传算法是受达尔文“物 竞天择、适者生存”进化 论启发而提出的一种优化 算法
21
遗传算法 (1/2)
传统优化算法的局限性
-具有一个局部极值点的函数
-具有多个局部极值点的函数
最优解
最优解? 22
最优解!
遗传算法 (2/2)
- 能否从多个方向同时进行搜索? 遗传算法的基本原理
停止
工具箱的扩充功能
用户可以修改工具箱中的函数,更 为重要的是用户可以通过编制 m文件 来任意地添加工具箱中原来没有的工具 函数。此功能充分体现了Matlab语言的 开发性。
matlab工具箱
Graph annotation. title - Graph title. xlabel - X-axis label. ylabel - Y-axis label. text - Text annotation. gtext - Mouse placement of text. grid - Grid lines. See also PLOTXYZ, GRAPHICS.
• 非线型方程求解
信号处理工具箱
• 数字和模拟滤波器设计、应用及仿真
• 谱分析和估计 • FFT、DCT等变换 • 参数化模型
学科前沿最新的工具箱
模糊控制逻辑工具箱
友好的交互设计界面,自适应神经模糊学习、聚类以及Sugeno推理 神经网络工具箱 神经网络系统具有集体运算的能力 和自适应的学习能力。具有很强的容错 性和鲁棒性,善于联想、综合和推广。
• • • • • Matlab Main Toolbox——matlab主工具箱 Control System Toolbox——控制系统工具箱 Communication Toolbox——通讯工具箱 Financial Toolbox——财政金融工具箱 System Identification Toolbox——系统辨识 工具箱 • Fuzzy Logic Toolbox——模糊逻辑工具箱 • Higher-Order Spectral Analysis Toolbox—— 高阶谱分析工具箱
3. Simulink动态仿真工具箱
simulink工具箱简介 • simulink 是实现动态系统建模、仿真和分 析的一个集成环境,使得matlab的功能得 到进一步扩展,它可以非常容易的实现可 视化建模,把理论研究和工程实践有机的 结合在一起。 • 大部分专用工具箱只要以matlab主包为基 础就能运行,有少数工具箱(通讯工具箱、 信号处理工具箱等)则要求有simulink工具 箱的支持。
MATLAB的一些有用的工具箱
MATLAB是很多人经常使用的“懒人”编程软件了。
可是大家是不是有时候仍然觉得他的功能不够强大呢?提供给大家一些matlab的软件toolbox,使得大家在做应用的时候更加得心应手吧。
ZSM (zero sum multinomial)/zsmcode.htmlBinaural-modeling software for MATLAB/Windows/home/Michael_Akeroyd/download2.htmlStatistical Parametric Mapping (SPM)/spm/ext/BOOTSTRAP MATLAB TOOLBOX.au/downloads/bootstrap_toolbox.htmlThe DSS package for MATLABDSS Matlab package contains algorithms for performing linear, deflation and symmet ric DSS.http://www.cis.hut.fi/projects/dss/package/Psychtoolbox/download.htmlMultisurface Method Tree with MATLAB/~olvi/uwmp/msmt.htmlA Matlab Toolbox for every single topic !/~baum/toolboxes.htmleg. BrainStorm - MEG and EEG data visualization and processingCLAWPACK is a software package designed to compute numerical solutions to hyper bolic partial differential equations using a wave propagation approach/~claw/Fusetool - Image Fusion Toolboxhttp://www.metapix.de/toolbox.htmTSTOOL is a MATLAB software package for nonlinear time series analysis.TSTOOL can be used for computing: Time-delay reconstruction, Lyapunov exponents, Fractal dimensions, Mutual information, Surrogate data tests, Nearest neighbor stati stics, Return times, Poincare sections, Nonlinear predictionhttp://www.physik3.gwdg.de/tstool/MATLAB / Data description toolboxA Matlab toolbox for data description, outlier and novelty detectionMarch 26, 2004 - D.M.J. Taxhttp://www-ict.ewi.tudelft.nl/~davidt/dd_tools/dd_manual.html。
MATLAB常用工具箱与函数库介绍
MATLAB常用工具箱与函数库介绍1. 统计与机器学习工具箱(Statistics and Machine Learning Toolbox):该工具箱提供了各种统计分析和机器学习算法的函数,包括描述统计、概率分布、假设检验、回归分析、分类与聚类等。
可以用于进行数据探索和建模分析。
2. 信号处理工具箱(Signal Processing Toolbox):该工具箱提供了一系列信号处理的函数和算法,包括滤波、谱分析、信号生成与重构、时频分析等。
可以用于音频处理、图像处理、通信系统设计等领域。
3. 控制系统工具箱(Control System Toolbox):该工具箱提供了控制系统设计与分析的函数和算法,包括系统建模、根轨迹设计、频域分析、状态空间分析等。
可以用于控制系统的设计和仿真。
4. 优化工具箱(Optimization Toolbox):该工具箱提供了各种数学优化算法,包括线性规划、非线性规划、整数规划、最优化等。
可以用于寻找最优解或最优化问题。
5. 图像处理工具箱(Image Processing Toolbox):该工具箱提供了图像处理和分析的函数和算法,包括图像滤波、边缘检测、图像分割、图像拼接等。
可以用于计算机视觉、医学影像处理等领域。
6. 神经网络工具箱(Neural Network Toolbox):该工具箱提供了神经网络的建模和训练工具,包括感知机、多层前馈神经网络、循环神经网络等。
可以用于模式识别、数据挖掘等领域。
7. 控制系统设计工具箱(Robust Control Toolbox):该工具箱提供了鲁棒控制系统设计与分析的函数和算法,可以处理不确定性和干扰的控制系统设计问题。
8. 信号系统工具箱(Signal Systems Toolbox):该工具箱提供了分析、设计和模拟线性时不变系统的函数和算法。
可以用于信号处理、通信系统设计等领域。
9. 符号计算工具箱(Symbolic Math Toolbox):该工具箱提供了符号计算的功能,可以进行符号表达式的运算、求解方程、求解微分方程等。
matlab toolbox类型

matlab toolbox类型Matlab Toolbox 类型Matlab 是一种强大的数值计算与科学编程工具,由于其卓越的性能和丰富的功能,被广泛应用于科学、工程和金融等领域。
为了更好地满足不同领域用户的需求,Matlab 提供了丰富的工具箱(Toolbox),包含了各种专门用于特定领域的函数和工具。
本文将介绍 Matlab Toolbox 的类型及其应用。
一、控制系统工具箱(Control System Toolbox)控制系统工具箱是 Matlab 中用于设计、分析和模拟控制系统的重要工具箱。
它包含了许多在控制工程中常用的函数和算法,如PID 控制器设计、稳定性分析、系统响应等。
控制系统工具箱的使用可以帮助工程师快速实现对控制系统的建模、仿真和优化。
二、图像处理工具箱(Image Processing Toolbox)图像处理工具箱是专门用于数字图像处理的工具箱,提供了丰富的图像处理函数和算法。
它可以帮助用户实现图像的滤波、增强、分割、配准等操作,还支持图像的压缩和编码。
图像处理工具箱被广泛应用于计算机视觉、医学影像分析、遥感图像处理等领域。
三、信号处理工具箱(Signal Processing Toolbox)信号处理工具箱提供了丰富的信号处理函数,用于设计和分析各种类型的信号。
这些函数包括了离散傅里叶变换(DFT)、滤波器设计、频谱分析等。
信号处理工具箱在音频处理、通信系统设计、生物医学信号处理等领域具有广泛的应用。
四、机器学习工具箱(Machine Learning Toolbox)机器学习工具箱是 Matlab 中用于实现各种机器学习算法的工具箱。
它包含了常用的分类、回归、聚类、降维等算法,如支持向量机(SVM)、决策树、神经网络等。
机器学习工具箱的使用使得用户能够在数据挖掘、模式识别、预测分析等任务中实现自动化的学习与决策。
五、优化工具箱(Optimization Toolbox)优化工具箱是用于解决数学最优化问题的工具箱,提供了各种优化算法和函数。
Matlab的第三方工具箱大全
Matlab的第三方工具箱大全(按住CTRL点击连接就可以到达每个工具箱的主页面来下载了)Matlab Toolboxes∙ADCPtools - acoustic doppler current profiler data processing∙AFDesign - designing analog and digital filters∙AIRES - automatic integration of reusable embedded software∙Air-Sea - air-sea flux estimates in oceanography∙Animation - developing scientific animations∙ARfit - estimation of parameters and eigenmodes of multivariate autoregressive methods∙ARMASA - power spectrum estimation∙AR-Toolkit - computer vision tracking∙Auditory - auditory models∙b4m - interval arithmetic∙Bayes Net - inference and learning for directed graphical models∙Binaural Modeling - calculating binaural cross-correlograms of sound∙Bode Step - design of control systems with maximized feedback∙Bootstrap - for resampling, hypothesis testing and confidence interval estimation ∙BrainStorm - MEG and EEG data visualization and processing∙BSTEX - equation viewer∙CALFEM - interactive program for teaching the finite element method∙Calibr - for calibrating CCD cameras∙Camera Calibration∙Captain - non-stationary time series analysis and forecasting∙CHMMBOX - for coupled hidden Markov modeling using max imum likelihood EM ∙Classification - supervised and unsupervised classification algorithms∙CLOSID∙Cluster - for analysis of Gaussian mixture models for data set clustering∙Clustering - cluster analysis∙ClusterPack - cluster analysis∙COLEA - speech analysis∙CompEcon - solving problems in economics and finance∙Complex - for estimating temporal and spatial signal complexities∙Computational Statistics∙Coral - seismic waveform analysis∙DACE - kriging approximations to computer models∙DAIHM - data assimilation in hydrological and hydrodynamic models∙Data Visualization∙DBT - radar array processing∙DDE-BIFTOOL - bifurcation analysis of delay differential equations∙Denoise - for removing noise from signals∙DiffMan - solv ing differential equations on manifolds∙Dimensional Analysis -∙DIPimage - scientific image processing∙Direct - Laplace transform inversion via the direct integration method∙DirectSD - analysis and design of computer controlled systems with process-oriented models∙DMsuite - differentiation matrix suite∙DMTTEQ - design and test time domain equalizer design methods∙DrawFilt - drawing digital and analog filters∙DSFWAV - spline interpolation with Dean wave solutions∙DWT - discrete wavelet transforms∙EasyKrig∙Econometrics∙EEGLAB∙EigTool - graphical tool for nonsymmetric eigenproblems∙EMSC - separating light scattering and absorbance by extended multiplicative signal correction∙Engineering Vibration∙FastICA - fixed-point algorithm for ICA and projection pursuit∙FDC - flight dynamics and control∙FDtools - fractional delay filter design∙FlexICA - for independent components analysis∙FMBPC - fuzzy model-based predictive control∙ForWaRD - Fourier-wavelet regularized deconvolution∙FracLab - fractal analysis for signal processing∙FSBOX - stepwise forward and backward selection of features using linear regression∙GABLE - geometric algebra tutorial∙GAOT - genetic algorithm optimization∙Garch - estimating and diagnosing heteroskedasticity in time series models∙GCE Data - managing, analyzing and displaying data and metadata stored using the GCE data structure specification∙GCSV - growing cell structure visualization∙GEMANOVA - fitting multilinear ANOVA models∙Genetic Algorithm∙Geodetic - geodetic calculations∙GHSOM - growing hierarchical self-organizing map∙glmlab - general linear models∙GPIB - wrapper for GPIB library from National Instrument∙GTM - generative topographic mapping, a model for density modeling and data visualization∙GVF - gradient vector flow for finding 3-D object boundaries∙HFRadarmap - converts HF radar data from radial current vectors to total vectors ∙HFRC - importing, processing and manipulating HF radar data∙Hilbert - Hilbert transform by the rational eigenfunction expansion method∙HMM - hidden Markov models∙HMMBOX - for hidden Markov modeling using maximum likelihood EM∙HUTear - auditory modeling∙ICALAB - signal and image processing using ICA and higher order statistics∙Imputation - analysis of incomplete datasets∙IPEM - perception based musical analysisJMatLink - Matlab Java classesKalman - Bayesian Kalman filterKalman Filter - filtering, smoothing and parameter estimation (using EM) for linear dynamical systemsKALMTOOL - state estimation of nonlinear systemsKautz - Kautz filter designKrigingLDestimate - estimation of scaling exponentsLDPC - low density parity check codesLISQ - wavelet lifting scheme on quincunx gridsLKER - Laguerre kernel estimation toolLMAM-OLMAM - Levenberg Marquardt with Adaptive Momentum algorithm for training feedforward neural networksLow-Field NMR - for exponential fitting, phase correction of quadrature data and slicing LPSVM - Newton method for LP support vector machine for machine learning problems LSDPTOOL - robust control system design using the loop shaping design procedure LS-SVMlabLSVM - Lagrangian support vector machine for machine learning problemsLyngby - functional neuroimagingMARBOX - for multivariate autogressive modeling and cross-spectral estimation MatArray - analysis of microarray dataMatrix Computation- constructing test matrices, computing matrix factorizations, visualizing matrices, and direct search optimizationMCAT - Monte Carlo analysisMDP - Markov decision processesMESHPART - graph and mesh partioning methodsMILES - maximum likelihood fitting using ordinary least squares algorithmsMIMO - multidimensional code synthesisMissing - functions for handling missing data valuesM_Map - geographic mapping toolsMODCONS - multi-objective control system designMOEA - multi-objective evolutionary algorithmsMS - estimation of multiscaling exponentsMultiblock - analysis and regression on several data blocks simultaneously Multiscale Shape AnalysisMusic Analysis - feature extraction from raw audio signals for content-based music retrievalMWM - multifractal wavelet modelNetCDFNetlab - neural network algorithmsNiDAQ - data acquisition using the NiDAQ libraryNEDM - nonlinear economic dynamic modelsNMM - numerical methods in Matlab textNNCTRL - design and simulation of control systems based on neural networks NNSYSID - neural net based identification of nonlinear dynamic systemsNSVM - newton support vector machine for solv ing machine learning problems NURBS - non-uniform rational B-splinesN-way - analysis of multiway data with multilinear modelsOpenFEM - finite element developmentPCNN - pulse coupled neural networksPeruna - signal processing and analysisPhiVis- probabilistic hierarchical interactive visualization, i.e. functions for visual analysis of multivariate continuous dataPlanar Manipulator - simulation of n-DOF planar manipulatorsPRT ools - pattern recognitionpsignifit - testing hyptheses about psychometric functionsPSVM - proximal support vector machine for solving machine learning problems Psychophysics - vision researchPyrTools - multi-scale image processingRBF - radial basis function neural networksRBN - simulation of synchronous and asynchronous random boolean networks ReBEL - sigma-point Kalman filtersRegression - basic multivariate data analysis and regressionRegularization ToolsRegularization Tools XPRestore ToolsRobot - robotics functions, e.g. kinematics, dynamics and trajectory generation Robust Calibration - robust calibration in statsRRMT - rainfall-runoff modellingSAM - structure and motionSchwarz-Christoffel - computation of conformal maps to polygonally bounded regions SDH - smoothed data histogramSeaGrid - orthogonal grid makerSEA-MAT - oceanographic analysisSLS - sparse least squaresSolvOpt - solver for local optimization problemsSOM - self-organizing mapSOSTOOLS - solving sums of squares (SOS) optimization problemsSpatial and Geometric AnalysisSpatial RegressionSpatial StatisticsSpectral MethodsSPM - statistical parametric mappingSSVM - smooth support vector machine for solving machine learning problems STATBAG - for linear regression, feature selection, generation of data, and significance testingStatBox - statistical routinesStatistical Pattern Recognition - pattern recognition methodsStixbox - statisticsSVM - implements support vector machinesSVM ClassifierSymbolic Robot DynamicsTEMPLAR - wavelet-based template learning and pattern classificationTextClust - model-based document clusteringTextureSynth - analyzing and synthesizing visual texturesTfMin - continous 3-D minimum time orbit transfer around EarthTime-Frequency - analyzing non-stationary signals using time-frequency distributions Tree-Ring - tasks in tree-ring analysisTSA - uni- and multivariate, stationary and non-stationary time series analysisTSTOOL - nonlinear time series analysisT_Tide - harmonic analysis of tidesUTVtools - computing and modifying rank-revealing URV and UTV decompositions Uvi_Wave - wavelet analysisvarimax - orthogonal rotation of EOFsVBHMM - variation Bayesian hidden Markov modelsVBMFA - variational Bayesian mixtures of factor analyzersVMT- VRML Molecule Toolbox, for animating results from molecular dynamics experimentsVOICEBOXVRMLplot - generates interactive VRML 2.0 graphs and animationsVSVtools - computing and modifying symmetric rank-revealing decompositions WAFO - wave analysis for fatique and oceanographyWarpTB - frequency-warped signal processingWAVEKIT - wavelet analysisWaveLab - wavelet analysisWeeks - Laplace transform inversion via the Weeks methodWetCDF - NetCDF interfaceWHMT - wavelet-domain hidden Markov tree modelsWInHD - Wavelet-based inverse halftoning via deconvolutionWSCT - weighted sequences clustering toolkitXMLTree - XML parserYAADA - analyze single particle mass spectrum dataZMAP - quantitative seismicity analysis。
matlab各工具箱功能简介(部分)
Toolbox工具箱序号工具箱备注一、数学、统计与优化1Symbolic Math Toolbox符号数学工具箱Symbolic Math Toolbox™提供用于求解和推演符号运算表达式以及执行可变精度算术的函数。
您可以通过分析执行微分、积分、化简、转换以及方程求解。
另外,还可以利用符号运算表达式为MATLAB®、Simulink®和Simscape™生成代码。
Symbolic Math Toolbox 包含MuPAD®语言,并已针对符号运算表达式的处理和执行进行优化。
该工具箱备有MuPAD 函数库,其中包括普通数学领域的微积分和线性代数,以及专业领域的数论和组合论。
此外,还可以使用MuPAD 语言编写自定义的符号函数和符号库。
MuPAD 记事本支持使用嵌入式文本、图形和数学排版格式来记录符号运算推导。
您可以采用HTML 或PDF 的格式分享带注释的推导。
2Partial Differential Euqation Toolbox偏微分方程工具箱偏微分方程工具箱™提供了用于在2D,3D求解偏微分方程(PDE)以及一次使用有限元分析。
它可以让你指定和网格二维和三维几何形状和制定边界条件和公式。
你能解决静态,时域,频域和特征值问题在几何领域。
功能进行后处理和绘图效果使您能够直观地探索解决方案。
你可以用偏微分方程工具箱,以解决从标准问题,如扩散,传热学,结构力学,静电,静磁学,和AC电源电磁学,以及自定义,偏微分方程的耦合系统偏微分方程。
3Statistics Toolbox统计学工具箱Statistics and Machine Learning Toolbox 提供运用统计与机器学习来描述、分析数据和对数据建模的函数和应用程序。
您可以使用用于探查数据分析的描述性统计和绘图,使用概率分布拟合数据,生成用于Monte Carlo 仿真的随机数,以及执行假设检验。
回归和分类算法用于依据数据执行推理并构建预测模型。
MATLAB常用工具箱与函数库介绍
MATLAB常用工具箱与函数库介绍1. 引言MATLAB是一款功能强大的数学软件,广泛应用于工程、科学、计算机科学等领域。
在MATLAB中,有许多常用的工具箱和函数库,可以帮助用户解决各种数学计算和数据处理问题。
本文将介绍几个常用的MATLAB工具箱和函数库,帮助读者更好地理解和使用这些工具。
2. 统计工具箱统计工具箱是MATLAB中一个重要的工具箱,用于统计数据的分析和处理。
这个工具箱提供了许多函数,如直方图、概率分布函数、假设检验等等。
读者可以使用统计工具箱来分析数据的分布特征、计算数据的均值和标准差、进行假设检验等。
3. 信号处理工具箱信号处理工具箱是MATLAB中用于处理信号的一个重要工具箱。
它提供了一些常用的函数,如滤波器、谱分析、窗函数等等。
利用信号处理工具箱,读者可以对信号进行滤波、频谱分析、窗函数设计等操作,帮助解决各种与信号处理相关的问题。
4. 优化工具箱优化工具箱是MATLAB中用于求解优化问题的一个重要工具箱。
它提供了一些常用的函数,如线性规划、非线性规划、整数规划等等。
利用优化工具箱,读者可以求解各种优化问题,如优化算法选择、变量约束等。
优化工具箱在生产、物流、金融等领域具有广泛的应用。
5. 控制系统工具箱控制系统工具箱是MATLAB中一个针对控制系统设计和分析的重要工具箱。
它提供了一些常用的函数,如系统模型构建、控制器设计、系统分析等。
利用控制系统工具箱,读者可以构建控制系统模型、设计控制器、进行系统稳定性分析等操作。
这个工具箱在自动化控制领域非常有用。
6. 图像处理工具箱图像处理工具箱是MATLAB中一个用于处理和分析图像的重要工具箱。
它提供了一些常用的函数,如图像滤波、边缘检测、图像分割等等。
利用图像处理工具箱,读者可以对图像进行滤波、边缘检测、目标分割等操作,帮助解决图像处理中的各种问题。
7. 符号计算工具箱符号计算工具箱是MATLAB中一个用于进行符号计算的重要工具箱。
MATLAB中常用的工具箱
6.1.1MA TLAB中常用的工具箱MA TLAB中常用的工具箱有:Matlab main toolbox——matlab主工具箱Control system toolbox——控制系统工具箱Communication toolbox——通信工具箱Financial toolbox——财政金融工具箱System identification toolbox——系统辨识工具箱Fuzzy logic toolbox ——模糊逻辑工具箱Higher-order spectral analysis toolbox——高阶谱分析工具箱Image processing toolbox——图像处理工具箱Lmi contral toolbox——线性矩阵不等式工具箱Model predictive contral toolbox——模型预测控制工具箱U-Analysis ang sysnthesis toolbox——u分析工具箱Neural network toolbox——神经网络工具箱Optimization toolbox——优化工具箱Partial differential toolbox——偏微分奉承工具箱Robust contral toolbox——鲁棒控制工具箱Spline toolbox——样条工具箱Signal processing toolbox——信号处理工具箱Statisticst toolbox——符号数学工具箱Symulink toolbox——动态仿真工具箱System identification toolbox——系统辨识工具箱Wavele toolbox——小波工具箱6.2优化工具箱中的函数1、最小化函数2、最小二乘问题3、方程求解函数4、演示函数中型问题方法演示函数大型文体方法演示函数。
MATLAB的工具箱
MATLAB的工具箱
MATLAB除了传统的交互式编程之外,还供应了丰富牢靠的矩阵运算、图形绘制、数据处理、图象处理、便利的WINDOWS编程等便利工具,消失了各种以MATLAB为基础的有用工具箱,广泛地运用于自动掌握、图象信号处理、生物医学工程、语言处理、雷达工程、信号分析、振动理论、时序分析与建模、化学统计学、优化设计等领域,并表现出一般高级语言难以比拟的优势。
较为常见的MATLAB工具箱主要包括:
1. 掌握系统工具箱(Control Systems Toolbox)
2. 系统辩识工具箱(System Identification Toolbox)
3. 鲁棒掌握工程箱(Robust Control Toolbox)
4. 多变量频率设计工具箱(Multivariable Frequency Design Toolbox)
5. 分析与综合工具箱(Analysis And Synthesis Toolbox)
6. 神经网络工具箱(Neural Network Toolbox)
7. 最优化工具箱(Optimization Toolbox)
8. 信号处理工具箱(Signal Processing System Toolbox)
9. 模糊推理系统工具箱(Fuzzy Inference System Toolbox)
10. 小波分析工具箱(Wavelet Toolbox)
11. 通信工具箱(Communication Toolbox)
1。
Matlab所有工具箱说明

Matlab所有工具箱说明工具箱或模块名称模块说明*MA TLAB Compiler 把MA TLAB的M文件编译成DLL文件,或EXE独立应用程序*MA TLABC/C++GraphicsLibrary MA TLABC/C++图形库*MA TLABC/C++Math Library MA TLABC/C++数学计算库*Optimization Toolbox 包含求函数零点,极值,规划等优化程序的工具箱*Partial Differential Equation Toolbox偏微分方程工具箱*Statistics Toolbox包含进行复杂统计分析所需程序的工具箱*StatisticsToolbox统计工具箱*Symbolic Math Toolbox 符号类数据的操作和运算工具箱,通过符号数学工具箱,MA TLAB 用户可以方便地将数学与符号运算纳入统一的环境当中,并且完全不丧失速度和精度DA TA Acquisition Toolbox数据采集工具箱Database Toolbox数据库工具箱Datafeed Toolbox数据流入工具箱Dials and Gauges Blockset刻度标尺模块集DSP Blockset数字信号模块集Embedded Target for Motorola HC12摩托罗拉HC12的嵌入目标Embedded Target for MotorolaMPC555摩托罗拉MPC555的嵌入目标Embedded Target for OSEK VDX OSEK VDX 嵌入目标Embedded TargetforInfineon C166 Infineon C166微控制器嵌入目标Embedded TargetforTIC6000 DSP(tm)TIC6000 DSP(tm)嵌入目标Excel Link EXCEL外链接Extended Symbolic Math 扩展符号数学,用于符号运算Filter Design Toolbox滤波器设计工具箱FilterDesign HDL Coder滤波器设计HDL 编码器,可生成HDL代码Financial Derivatives Toolbox金融系统工具箱Financial Time Series Toolbox金融时间系列工具箱Financial Toolbox金融财政工具箱Fixed-Income Toolbox固定收益证券建模和分析Fixed-Point Blockset定点模块集Fuzzy Logic Toolbox模糊逻辑工具箱GARCH Toolbox 单变量广义自回归条件异方差工具箱,用于对金融市场中反复无常的变化性进行分析Genetic Algorithm Direct SearchToolbox遗传算法直接搜索工具箱Image Processing Toolbox图像处理工具箱Instrument Control Toolbox仪表控制工具箱Link for Code Composer Studio编码复合工作室链接Link for ModelSim模型仿真链接Mapping Toolbox制图工具箱MA TLAB Builder for COM COM的MA TLAB 生成器MA TLAB Builder for Excel Excel的MA TLAB 生成器MA TLAB Report Generator MA TLAB报告生成器Model Predictive Control Toolbox模型预测控制工具箱Model-Based Calibration Toolbox 基于模型的标定工具箱,用于复杂动力传动系统标定的设计ModelPredictive Control Toolbox模型预测控制工具箱Mu-Analysis and Synthesis Toolbox Mu分析与合成工具箱Neural Network Toolbox神经网络工具箱Nonlinear Control Design Blockset非线性设计模块集OPC Toolbox OPC 工具箱Power System Blockset动力系统模块集Real-Time Windows Target实时Windows目标Real-Time Workshop实时工作空间Real-time Workshop Ada Coder实时工作间Ada编码器Real-Time Workshop Embedded Coder实时工作空间内置编码器Requirements Management Interface需求管理界面RF Blockset RF模块RF Toolbox RF工具箱Robust Control Toolbox鲁棒控制工具箱SB2SL(convert models to Simulink)模型转换成Simulink工具Signal Processing Blokset信号处理模块Signal Processing Toolbox信号处理工具箱SimPowerSystems电力电子仿真系统Simulink Accelerator加速器仿真Simulink ControlDesign控制设计仿真Simulink Fixed Point定点控制仿真Simulink ParameterEstimation参数估计仿真Simulink ReportGenerator仿真报告生成器Simulink Response Optimization仿真响应优化Simulink V erification and V alidation仿真确认和生效Spline Toolbox内含样条和插值函数的工具箱Stateflow 与Simulink配合使用, 主要用于较大型, 复杂动态系统的建模,分析,仿真Stateflow状态流Stateflow Coder状态流编码器System Identification Toolbox据时域信号进行动态系统辨别工具箱System Identification Toolbox系统辨识工具箱Video and Image Processing Blockset视频和图像处理模块VirtualReality Toolbox虚拟现实工具箱Wavelet Toolbox小波工具箱xPC Target xPC对象xPC Target Embedded Option xPC对象内置属性。
matlab工具箱介绍
matlab工具箱介绍MATLAB有三十多个工具箱大致可分为两类:功能型工具箱和领域型工具箱.功能型工具箱主要用来扩充MATLAB的符号计算功能、图形建模仿真功能、文字处理功能以及与硬件实时交互功能,能用于多种学科。
而领域型工具箱是专业性很强的。
如控制系统工具箱(Control System Toolbox)、信号处理工具箱(Signal Processing Toolbox)、财政金融工具箱(Financial Toolbox)等。
下面,将MATLAB工具箱内所包含的主要内容做简要介绍:1)通讯工具箱(Communication Toolbox)。
令提供100多个函数和150多个SIMULINK模块用于通讯系统的仿真和分析——信号编码——调制解调——滤波器和均衡器设计——通道模型——同步可由结构图直接生成可应用的C语言源代码。
2)控制系统工具箱(Control System Toolbox)。
鲁连续系统设计和离散系统设计* 状态空间和传递函数* 模型转换* 频域响应:Bode图、Nyquist图、Nichols图* 时域响应:冲击响应、阶跃响应、斜波响应等* 根轨迹、极点配置、LQG3)财政金融工具箱(FinancialTooLbox)。
* 成本、利润分析,市场灵敏度分析* 业务量分析及优化* 偏差分析* 资金流量估算* 财务报表4)频率域系统辨识工具箱(Frequency Domain System ldentification Toolbox* 辨识具有未知延迟的连续和离散系统* 计算幅值/相位、零点/极点的置信区间* 设计周期激励信号、最小峰值、最优能量诺等5)模糊逻辑工具箱(Fuzzy Logic Toolbox)。
* 友好的交互设计界面* 自适应神经—模糊学习、聚类以及Sugeno推理* 支持SIMULINK动态仿真* 可生成C语言源代码用于实时应用(6)高阶谱分析工具箱(Higher—Order SpectralAnalysis Toolbox* 高阶谱估计* 信号中非线性特征的检测和刻画* 延时估计* 幅值和相位重构* 阵列信号处理* 谐波重构(7)图像处理工具箱(Image Processing Toolbox)。
Matlab的第三方工具箱大全(强烈推荐)

Matlab的第三⽅⼯具箱⼤全(强烈推荐)Matlab ToolboxesADCPtools - acoustic doppler current profiler dataprocessingAFDesign - designing analog and digital filtersAIRES - automatic integration of reusable embedded softwareAir-Sea - air-sea flux estimates in oceanographyAnimation - developing scientific animationsARfit - estimation of parameters and eigenmodes of multivariate autoregressive methodsARMASA - power spectrum estimationAR-Toolkit - computer vision trackingAuditory - auditory modelsb4m - interval arithmeticBayes Net - inference and learning for directed graphical modelsBinaural Modeling - calculating binaural cross-correlograms of soundBode Step - design of control systems with maximized feedbackBootstrap - for resampling, hypothesis testing and confidence interval estimationBrainStorm - MEG and EEG data visualization and processingBSTEX - equation viewerCALFEM - interactive program for teaching the finite element methodCalibr - for calibrating CCD camerasCamera CalibrationCaptain - non-stationary time series analysis and forecastingCHMMBOX - for coupled hidden Markov modeling using maximum likelihood EMClassification - supervised and unsupervised classification algorithmsCLOSIDCluster - for analysis of Gaussian mixture models for data set clusteringClustering - cluster analysisClusterPack - cluster analysisCOLEA - speech analysisCompEcon - solving problems in economics and finance Complex - for estimating temporal and spatial signal complexitiesComputational StatisticsCoral - seismic waveform analysisDACE - kriging approximations to computer modelsDAIHM - data assimilation in hydrological and hydrodynamic modelsData VisualizationDBT - radar array processingDDE-BIFTOOL - bifurcation analysis of delay differential equationsDenoise - for removing noise from signalsDiffMan - solving differential equations on manifoldsDimensional Analysis -DIPimage - scientific image processingDirect - Laplace transform inversion via the direct integration methodDirectSD - analysis and design of computer controlled systems with process-oriented modelsDMsuite - differentiation matrix suiteDMTTEQ - design and test time domain equalizer design methodsDrawFilt - drawing digital and analog filtersDSFWAV - spline interpolation with Dean wave solutions DWT - discrete wavelet transformsEasyKrigEconometricsEEGLABEigTool - graphical tool for nonsymmetric eigenproblems EMSC - separating light scattering and absorbance by extended multiplicative signal correctionEngineering VibrationFastICA - fixed-point algorithm for ICA and projection pursuitFDC - flight dynamics and controlFDtools - fractional delay filter designFlexICA - for independent components analysisFMBPC - fuzzy model-based predictive controlForWaRD - Fourier-wavelet regularized deconvolutionFracLab - fractal analysis for signal processingFSBOX - stepwise forward and backward selection of features using linear regressionGABLE - geometric algebra tutorialGAOT - genetic algorithm optimizationGarch - estimating and diagnosing heteroskedasticity in time series modelsGCE Data - managing, analyzing and displaying data and metadata stored using the GCE data structure specification GCSV - growing cell structure visualizationGEMANOVA - fitting multilinear ANOVA modelsGenetic AlgorithmGeodetic - geodetic calculations#1助理⼯程师精华 0积分 49帖⼦ 76⽔位 164技术分 0 Kalman - Bayesian Kalman filter Kalman Filter - filtering, smoothing and parameter estimation (using EM) for linear dynamical systems KALMTOOL - state estimation of nonlinear systems Kautz - Kautz filter design Kriging LDestimate -estimation of scaling exponents LDPC - low density parity check codes LISQ - wavelet lifting scheme on quincunx grids LKER - Laguerre kernel estimation toolLMAM-OLMAM - Levenberg Marquardt with Adaptive Momentum algorithm for training feedforward neural networksLow-Field NMR - for exponential fitting, phase correction of quadrature data and slicingLPSVM - Newton method for LP support vector machine for machine learning problemsLSDPTOOL - robust control system design using the loop shaping design procedureLS-SVMlabLSVM - Lagrangian support vector machine for machine learning problemsLyngby - functional neuroimagingMARBOX - for multivariate autogressive modeling and cross-spectral estimationMatArray - analysis of microarray dataMatrix Computation - constructing test matrices, computing matrix factorizations, visualizing matrices, and direct search optimization MCAT - Monte Carlo analysisMDP - Markov decision processesMESHPART - graph and mesh partioning methodsMILES - maximum likelihood fitting using ordinary least squares algorithmsMIMO - multidimensional code synthesisMissing - functions for handling missing data valuesM_Map - geographic mapping toolsMODCONS - multi-objective control system designMOEA - multi-objective evolutionary algorithmsMS - estimation of multiscaling exponentsMultiblock - analysis and regression on several data blockssimultaneouslyMultiscale Shape AnalysisMusic Analysis - feature extraction from raw audio signals forcontent-based music retrievalMWM - multifractal wavelet modelNetCDFNetlab - neural network algorithmsNiDAQ - data acquisition using the NiDAQ libraryNEDM - nonlinear economic dynamic modelsNMM - numerical methods in Matlab textNNCTRL - design and simulation of control systems based on neural networksNNSYSID - neural net based identification of nonlinear dynamic systems NSVM - newton support vector machine for solving machine learning problemsNURBS - non-uniform rational B-splinesN-way - analysis of multiway data with multilinear models OpenFEM - finite element developmentPCNN - pulse coupled neural networksPeruna - signal processing and analysisPhiVis - probabilistic hierarchical interactive visualization, i.e. functions for visual analysis of multivariate continuous data Planar Manipulator - simulation of n-DOF planar manipulators PRTools - pattern recognitionpsignifit - testing hyptheses about psychometric functionsPSVM - proximal support vector machine for solving machine learning problemsPsychophysics - vision researchPyrTools - multi-scale image processingRBF - radial basis function neural networksRBN - simulation of synchronous and asynchronous random boolean networksReBEL - sigma-point Kalman filtersRegression - basic multivariate data analysis and regression Regularization ToolsRegularization Tools XPRestore ToolsRobot - robotics functions, e.g. kinematics, dynamics and trajectory generationRobust Calibration - robust calibration in statsRRMT - rainfall-runoff modellingSAM - structure and motionSchwarz-Christoffel - computation of conformal maps to polygonally bounded regionsSDH - smoothed data histogramSeaGrid - orthogonal grid makerSEA-MAT - oceanographic analysisSLS - sparse least squaresSolvOpt - solver for local optimization problemsSOM - self-organizing mapSOSTOOLS - solving sums of squares (SOS) optimization problems Spatial and Geometric AnalysisSpatial RegressionSpatial StatisticsSpectral MethodsSPM - statistical parametric mappingSSVM - smooth support vector machine for solving machine learning problemsSTATBAG - for linear regression, feature selection, generation of data, and significance testingStatBox - statistical routinesStatistical Pattern Recognition - pattern recognition methodsStixbox - statisticsSVM - implements support vector machinesSVM ClassifierSymbolic Robot DynamicsTEMPLAR - wavelet-based template learning and pattern classification TextClust - model-based document clustering TextureSynth - analyzing and synthesizing visual texturesTfMin - continous 3-D minimum time orbit transfer around EarthTime-Frequency - analyzing non-stationary signals using time-frequency distributionsTree-Ring - tasks in tree-ring analysisTSA - uni- and multivariate, stationary and non-stationary time series analysisTSTOOL - nonlinear time series analysisT_Tide - harmonic analysis of tidesUTVtools - computing and modifying rank-revealing URV and UTV decompositionsUvi_Wave - wavelet analysisvarimax - orthogonal rotation of EOFsVBHMM - variation Bayesian hidden Markov modelsVBMFA - variational Bayesian mixtures of factor analyzersVMT - VRML Molecule Toolbox, for animating results from molecular dynamics experimentsVOICEBOXVRMLplot - generates interactive VRML 2.0 graphs and animations VSVtools - computing and modifying symmetric rank-revealing decompositionsWAFO - wave analysis for fatique and oceanographyWarpTB - frequency-warped signal processingWAVEKIT - wavelet analysisWaveLab - wavelet analysis。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
schurmr 利用Schur法求降阶模型
slowfast 将状态空间模型按照快-慢原则分解
stabsep 将状态空间模型按照稳定/不稳定原则分解
6)鲁棒性和最坏情况分析
cpmargin 计算包含反馈控制器的闭环系统的稳定性裕度
gevp LMI约束下的广义特征值
mincx LMI约束下最小化线性对象
17)结果验证
evallmi 针对给定的决策变量评估LMI
showlmi 待评估LMI对象的左边项和右边项
18)修改LMI对象
dellmi 从现有LMI系统中移除LMI对象
delmvar 从带求解的LMI问题中移除矩阵变量
m1 = ureal('m1',1,'percent',20);
m2 = ureal('m2',1,'percent',20);
k = ureal('k',1,'percent',20);
s = zpk('s'); % create the Laplace variable s
Matlab鲁棒控制工具箱(Robust Control Toolbox)
目 录
一、引言 2
1、工具箱函数简介 2
1)不确定元素 2
2)不确定矩阵和系统 2
3)不确定模型的控制 3
4)不确定模型间的互连 3
5)模型降阶 3
6)鲁棒性和最坏情况分析 4
7)参数依赖系统的鲁棒性分析 4
popov 执行Popov鲁棒性检验
robopt 创建可供robuststab和robustperf选择的对象
robustperf 计算不确定多变量系统的鲁棒性能裕度
robuststab 计算不确定多变量系统的鲁棒稳定性裕度
wcgain 计算不确定系统的最坏情况下的增益界限
h2hinfsyn 极点配置约束下的混合H2/H∞设计
h2syn 针对LTI模型设计H2控制器
hinfsyn 针对LTI模型设计H∞最优控制器
loopsyn H∞回路成形控制器设计
ltrsyn LQG回路传递函数恢复控制器设计
mkfilter 创建Bessel,Butterworth,Chebyshev,RC滤波器
幅值响应数据
10)采样系统
sdhinfnorm 计算采样系统的L2范数
sdhinfsyn 采样系统的H∞控制器设计
sdlsim 带有反馈回路的采样系统的时域响应
11)增益调度
hinfgs 增益调度H∞控制器设计
12)频域响应模型
frd/loglog frd对象的log-log度量
图2 "ACC Benchmark" Two-Cart System Block Diagram y1 = P(s) u1
最里面的虚线框传递函数矩阵为
其中,输入为u1, u2, 输出为y1, y2。
利用matlab对不确定系统P建模如下:
% Create the uncertain real parameters m1, m2, & k
mktito 将LTI系统分解为两输入-两输出系统
sectf 状态空间模型的双线性变换
skewdec 创建反对称矩阵
symdec 创建对称矩阵
14)LMI函数
getlmis LMI系统的内部描述
lmiedit 用matlab语言编辑或显示LMI系统
lmiterm 增加新项给现有的LMI对象
udyn 创建未定义结构的不确定动态系统对象
ultidyn 创建线性时不变不确定性对象
ureal 创建不确定实数参量
2)不确定矩阵和系统
diag 对不确定矩阵和系统对角化
randatom 创建随机不确定性atom对象
randumat 创建随机不确定性矩阵
repmat 复制和命名不确定矩阵
simplify 简化不确定对象的表达式
squeeze 将umat对象去掉一维
usample 产生随机不确定对象
usubs 替换不确定对象中的不确定参数
uss/ssbal 将不确定系统中的状态/不确定性标量化
4)不确定模型间的互连
lmiinfo 现有LMI对象的信息
lminbr LMI系统中的LMI对象的个数
mat2dec 从矩阵中提取决策变量向量
matnbr LMI系统中矩阵变量的个数
16)LMI求解
defcx 为mincx对象设定cTx对象
feasp 求解给定的LMI系统
lmivar 在现有的LMI系统中设定矩阵变量
newlmi 增加新的LMI对象给现有的LMI系统
setlmis 初始化LMI系统
15)LMI特征
dec2mat 从决策变量向量中提取出矩阵值
decinfo 描述矩阵变量和决策变量中的联系
decnbr LMI系统中的决策变量个数
setmvar 举例矩阵变量和待评估的LMI项
2、不确定性建模
鲁棒控制的核心是对不确定LTI系统的建模。系统的不确定性来源于系统参数不能精确获得,或者变化范围很大,比如系统零极点位置未知、增益未知。也可能存在结构未知。
利用鲁棒控制工具箱可以利用matlab对象构造不确定LTI系统。
例1:ACC Bechmark Problem
iconnect 创建空白的互连对象
icsignal 创建icsignal对象
imp2exp 将线性关系转换为输入-输出关系
stack 将不确定矩阵、模型或者数组压入堆中
sysic 互连确定与不确定矩阵或系统
5)模型降阶
balancmr 利用均方根法求降阶模型
该工具箱提供了一系列的控制器分析和综合函数,能够分析最坏情况下的性能及确定最坏情况下的参数值。利用模型降阶函数能够对复杂模型进行简化。同时提供了先进的鲁棒控制方法,如H2、H∞、LMI、μ分析等。
一、引言
1、工具箱函数简介
1)不确定元素
ucomplex 创建不确定复数参量
ucomplexm 创建不确定复数矩阵
8)控制器综合 4
9)μ综合 5
10)采样系统 5
11)增益调度 5
12)频域响应模型 5
13)公用函数 6
14)LMI函数 6
15)LMI特征 6
16)LMI求解 6
17)结果验证 6
18)修改LMI对象 7
2、不确定性建模 7
3、最坏情况下的性能分析 9
4、MIMO系统的鲁棒控制器设计 11
gapmetric 计算两个系统间的gap、nugap距离上限
loopmargin 分析反馈回路
loosens 分析包含反馈控制器的闭环系统的灵敏度
mussv 计算所构造的异值(μ)的界限
mussvextract 从mussv创建的数据结构中提出muinfo对象
ncfmargin 计算反馈回路的归一化稳定性裕度
4、ncfmr函数 28
5、参考文献 30
四、鲁棒性分析 30
1、不确定性建模 30
2、鲁棒性分析 34
3、MIMO系统的鲁棒性分析 38
4、最坏情况下增益分析 43
Matlab鲁棒控制工具箱(Robust Control Toolbox)
鲁棒控制工具箱提供了一系列的函数和工具以支持带有不确定元素的多输入多输出控制系统的设计。在该工具箱的帮助下,你可以建立带有不确定参数和动态特性的LTI模型,也可以分析MIMO系统的稳定性裕度和最坏情况下的性能。
psys 设置线性的多胞或者参数依赖系统
pvec 设置不确定性向量或者时变参数
pvinfo 参数向量的参数
quadperf 计算多胞模型或者P-系统的二次型H∞指标
guadstab 评估多胞模型或者P-系统的二次型稳定性
8)控制器综合
augw 为加权混合灵敏度回路成形设计创建增广系统模型
3)不确定模型的控制
actual2normalized 对于给定的atom对象,计算其与标准值间的归一化距离
gridureal 将ureal对象均匀网格化
isuncertain 判断是否为不确定性系统
lftdata 将不确定对象分解为固定的规范型和固定的不确定性部分
normalized2actual 将正规化坐标系中的atom值转换为实际值
5、模型降阶及逼近 13
6、作者简介 16
7、参考文献 17
代码1 ACC Benchmark Problem 18
代码2 NASA HiMAT 18
二、多变量回路成形设计 19
三、模型降阶 20
1、Hankel奇异值 20
2、加性误差方法和乘性误差方法 22
3、modreal函数 26
randuss 创建随机不确定性状态空间模型
ufrd 创建不确定性频域响应数据对象(ufrd),或者将其它模型转
换为ufrd对象
umat 创建不确定性矩阵
uss 定义不确定性状态空间模型,或者将LTI对象转换为不确定
性状态空间模型
rss 创建随机稳定连续时间状态空间模型
dkitopt 创建供dksyn使用的对象
drawmag 鼠标交互操作函数
fitfrd 针对状态空间模型,合理化D标度的频域响应