牧野火花机编程手册
牧野火花机编程手册2
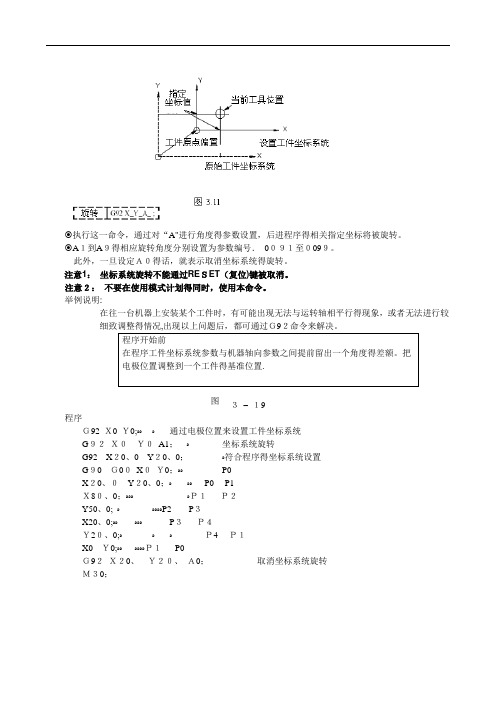
牧野火花机编程手册2————————————————————————————————作者:————————————————————————————————日期:ﻩ∙执行这一命令,通过对“A”进行角度的参数设置,后进程序的相关指定坐标将被旋转。
∙A1到A9的相应旋转角度分别设置为参数编号. 0091至0099。
此外,一旦设定A0的话,就表示取消坐标系统的旋转。
注意1: 坐标系统旋转不能通过RESET(复位)键被取消。
注意2: 不要在使用模式计划的同时,使用本命令。
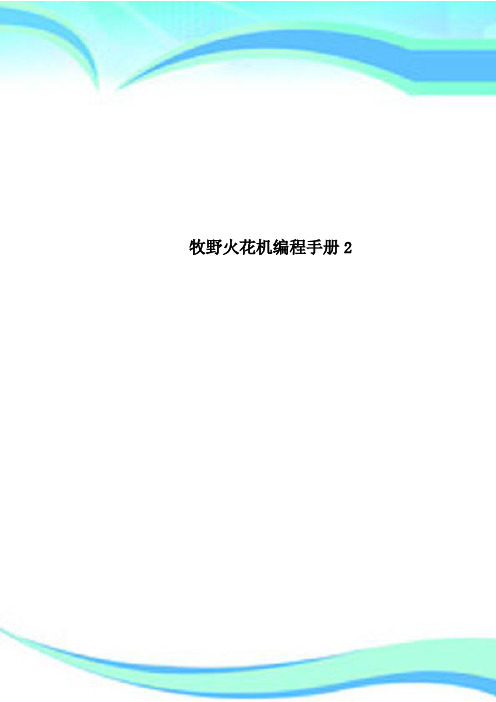
举例说明:在往一台机器上安装某个工件时,有可能出现无法与运转轴相平行的现象,或者无法进行较细致调整的情况,出现以上问题后,都可通过G92命令来解决。
程序开始前在程序工件坐标系统参数和机器轴向参数之间提前留出一个角度的差额。
把电极位置调整到一个工件的基准位置。
图3– 19程序G92X0Y0; ﻩ通过电极位置来设置工件坐标系统G92X0Y0A1; ﻩ坐标系统旋转G92X20.0 Y20.0;ﻩ符合程序的坐标系统设置G90G00X0Y0;ﻩP0X20.0Y20.0;ﻩﻩﻩP0 P1X80.0;ﻩﻩﻩﻩP1P2Y50.0;ﻩﻩﻩP2P3X20.0;ﻩﻩP3 P4Y20.0;ﻩﻩﻩP4P1X0Y0;ﻩﻩﻩP1P0G92X20. Y20. A0;ﻩﻩ取消坐标系统旋转M30;ﻩﻩﻩﻩ3–20ﻬ3.3ﻩ输入部件系统命令相关值的选项这部分说明了一些命令,这些命令使用程序中的数值设置各部件系统,以及它们的输入方法。
表3.2命令值输入模式功能字状态功能小节G90G91(P)绝对模式增量模式3.3.1图3–21ﻬ3.3.1绝对坐标/增量坐标(G90/91)功能: ﻩ命令模式选项G90–绝对命令G91–增量命令格式:ﻩG90/91| X-Y-Z-(C-B-W-) | ;举例说明:G90 X25.0Y20.0;G91 X-25.0Y-20.0;说明:∙通过自工件坐标零点开始的坐标值,绝对命令(G90)指定了所有点的移动。
牧野火花机编程手册 可修改 可下载 优质文档 (2)

放电加工机
MGH 电源
编程说明手册
MAKINO铣床有限公司
7GF1-NF02-0106(E)
第一章
1. 绪言
本程序设计手册说明了如何将数控程序应用于放电加工。
本手册不仅可供第一次开始编制数控程序的初学者使用,也适用于那些想更好地运用数控功能的人。
第二章
程序设计基本原理2. 程序设计基本原理
2.1程序结构
放电加工要求的一系列操作指令的总和称为“程序”。
程序由放电加工的指令单元的程序块构成。
一个程序块由一些字组成,每一个操作由一个字母符号的地址以及该地址之后的数值组成。
每一个数字符号、字母符号或者代码称为“字符”。
图2.1说明了程序结构。
牧野火花机编程手册
∙执行这一命令,通过对“A”进行角度的参数设置,后进程序的相关指定坐标将被旋转。
∙A1到A9的相应旋转角度分别设置为参数编号.0091至0099。
此外,一旦设定A0的话,就表示取消坐标系统的旋转。
注意1:坐标系统旋转不能通过RESET(复位)键被取消。
注意2:不要在使用模式计划的同时,使用本命令。
举例说明:在往一台机器上安装某个工件时,有可能出现无法与运转轴相平行的现象,或者无法进行较细致调整的情况,出现以上问题后,都可通过G92命令来解决。
程序开始前在程序工件坐标系统参数和机器轴向参数之间提前留出一个角度的差额。
把电极位置调整到一个工件的基准位置。
图3–19程序G92X0Y0;通过电极位置来设置工件坐标系统G92X0Y0A1;坐标系统旋转G92X20.0Y20.0;符合程序的坐标系统设置G90G00X0Y0;P0X20.0Y20.0;P0P1X80.0;P1P2Y50.0;P2P3X20.0;P3P4Y20.0;P4P1X0Y0;P1P0M30;3–203.3输入部件系统命令相关值的选项这部分说明了一些命令,这些命令使用程序中的数值设置各部件系统,以及它们的输入方法。
表3.2命令值输入模式功能字状态功能小节G90G91(P)绝对模式增量模式3.3.1图3–213.3.1绝对坐标/增量坐标(G90/91)功能:命令模式选项G90–绝对命令G91–增量命令格式:G90/91| X-Y-Z-(C-B-W-)| ;举例说明:G90X25.0Y20.0;G91X-25.0Y-20.0;说明:∙通过自工件坐标零点开始的坐标值,绝对命令(G90)指定了所有点的移动。
∙通过自当前点开始的一个增加值,增量命令(G91)指定了点的移动。
(1)绝对模式(G90X25.0Y20.0;)注意:当NC部件处于通电状态中,G90和G91之间的选项被设定为一个参数。
[G90/G91选项:参数编号.0060]3–22举例:程序G92X0Y0;[X’Y’ 工件坐标系统设置]G90G01X10.0Y20.0F1;(P0P1)X30.0Y30.0;(P1P2)G91X30.0Y-10.0;(P2P3)G92X20.0Y10.0;[X"Y" 工件坐标系统设置]X10.0Y20.0;(P3P4)G90X40.0Y10.0;(P4P5)M30;3–233.4行进命令这一部分说明了有关运转的命令。
牧野火花机编程手册
牧野火花机编程手册————————————————————————————————作者:————————————————————————————————日期:放电加工机MGH 电源编程说明手册MAKINO铣床有限公司7GF1-NF02-0106(E) ﻬ警告1. 本说明手册未包括的功能,一般来讲,不能被执行。
2.本说明手册提供的说明应当得到遵守,否则,其功能可能不能被正确执行,或者可能对系统产生不利的影响。
3. 根据程序改进的情况可能对本说明手册进行修改,不再另行通知。
4.如果你对本手册有任何不清楚的地方,请与我们联系。
目录1. 绪言------------------――---------------―1–12.程序设计基本原理---――--------――--------------―2–12.1程序结构---------―――-----――-------------―2–12.1.1地址符-------------------------------――ﻩ2–32.1.1.1 程序号字-----------------――-----------――ﻩ2–32.1.1.2序列号字-------―――――――----――-----------―2– 42.1.1.3坐标字--------------------――---------―― 2– 42.1.1.4准备功能字--------------――――-――---------―ﻩ2– 62.1.1.5进给功能字----―――――-----------――----―――――ﻩ2– 62.1.1.6主轴功能字---------------------――-------―2– 62.1.1.7 电极功能字----------------------――-----――2– 62.1.1.8 辅助功能字-----------------------――-----―2– 62.1.1.9 访问程序号字/重复计数字------------------――-----2– 62.1.1.10 偏置量字--------------------------――---ﻩ2–62.1.1.11 加工条件字--------------------------――--ﻩ2–72.1.2 程序块------------------------------――-―2–72.1.2.1程序块的结束---------------------------―――2– 72.1.2.2 跳过任选程序块----------------------------―2–82.1.2.3 注释输入-------------------------------― 2–92.2 坐标系统--------------------------------―ﻩ2–92.2.1机器坐标系统-----------------------------―2–102.2.2 工件坐标系统-----------------------------―ﻩ2–112.2.3局部坐标系统-----------------------------―ﻩ2–122.2.4 绝对值和增量值命令--------------------------―ﻩ2–123.功能字---------------------------------――3– 13.1 G/M代码表-------------------------------―ﻩ3–13.1.1 G代码表-------------------------------- 3– 13.1.2 M 代码表-------------------------------―3–43.2坐标系统命令------------------------------―ﻩ3–63.2.1平面指定(G17/18/19)―――――――――――--------------――3–73.2.2 限制区域指定(G22/23)―――――――――――――――---------―――3– 9 3.2.3局部坐标系统设置(G52)----――――――――――――――――――――――3–113.2.4 机器坐标系统命令(G53)--――――――――――――――――――――――――ﻩ3–13i3.2.5 工件坐标系统选择(G54–61/G500–509)----------------―――ﻩ3–15 3.2.6工件坐标系统设置(G92)――――――――――――――――――――――--――ﻩ3–18 3.3 命令值输入单位系统的选择――-----------------------ﻩ3– 213.3.1绝对坐标系统/增量坐标系统(G90/91)-------------―――――――3– 223.4进给命令---------------------------------ﻩ3– 243.4.1直线插补(G00/01)---------------------------――3–253.4.2 圆弧插补(G02/03) --------------------------――3–283.4.3 暂停(G04)------------------------------――ﻩ3–333.4.4 单向定位(G14)----------------------------――ﻩ3–343.4.5基准点返回(G28/29)--------------------------――3–363.4.6 第2~4基准点返回(G30)------------------------――3– 403.4.7 外部跳过功能(G31)--------------------------――3–423.4.8直接进给速度输入(F)--------------------------―ﻩ3–443.5 数据设置--------------------------------―3– 453.5.1 直接数据写入(G10)--------------------------――3–463.6电极补偿--------------------------------―3– 553.6.1 电极补偿值的选择(D/H)----------――――――――――――――――ﻩ3–56 3.6.2 电极补偿值的改变(G10)--------------――――――――――――ﻩ3–583.6.3 电极直径补偿(G40/41/42)--------------------―――――3–593.6.4电极长度补偿(G43/44/49)-----------------------――3– 713.7 缩放(G47/48)-----------------------------―――3– 733.8 旋转(G68/69)-----------------------------―――3– 773.9镜像(G70/71)-----------------------------―――ﻩ3–793.10 封闭循环-------------------------------――ﻩ3–813.10.1 模式化加工(G74/75)-------------------------――3–823.10.2 跳转(G76/77)----------------------――――--――ﻩ3–863.10.3加工(G80/81/82/83)--------------------------―ﻩ3–963.10.4定位(G84/85/86)---------------------------――ﻩ3–1033.10.5加工起始点/中断点返回功能(G98/99)连续程序块(外形)加工关闭/开启(G958/959)--------------――3–1073.10.6旋转拷贝(G26)---------------------------――3–1083.11 辅助功能(M)/主轴速度(S)/电极编号(T) 功能----------------――ﻩ3–114ii3.11.1 自动运行停止/终止(M00/01/02/03)------――――――――――――――ﻩ3–1163.11.2 接触停止忽略功能(M19)------------------------ﻩ3–1173.11.3 主轴极性反转功能(M24/25)---------------------――3–1183.11.4 绝缘工作液体供应功能(M28/29)--------------------- 3–1183.11.5 加工功能(M26/27)-------------------------――ﻩ3–1193.11.6 子程序功能(M98/99)--------------------------ﻩ3–1203.11.7 电极变换功能(M06/07/08/T)-----------------------3–1213.11.8MA/MR设备(MA/MR HEAD)(M57/56/03/05)-----------―――――ﻩ3–1273.11.9 DH设备(DH HEAD)功能(M18)――----------------――――ﻩ3–1323.11.10 吹送功能(M09/40–49/50/72/73)--------------------3–1333.11.11(绝缘工作液)槽升降功能(M58/59)-------------------3–1363.11.12托盘交换功能(M60)------------------------ --3–1363.11.13SL功能(M70/71)--------------------------- 3–1383.11.14转轴制动功能(M78/79)-----------------------――ﻩ3–1393.12加工条件(E/G10)---------------------------――3–1404. 用户宏程序――――――――-----------------------――4–14.1 一般说明--------------------------------- ﻩ4–14.1.1用户宏程序的特点---------------------------――4–14.1.2 用户宏程序及其运行模式------------------------――ﻩ4–24.2 子程序――――――---------------------------- 4–34.2.1子程序访问类型----------------------------――4–34.2.2简单访问(M98/G27)----------------------------4–34.2.3 参数访问(G65)-----------------------------―4–54.2.4虚拟命令代码访问(参数编号140-171)-------------------―4–64.2.5 子程序的嵌套------------------------------―4–94.3 参数和变量功能-----------------------------―ﻩ4–104.3.1 变量的用途------------------------------――4–104.3.2变量精确度和常量(VARMAP)----------------------――4–144.3.3 空变量特性(#0)----------------------------――ﻩ4–154.3.4 参数和局部变量(#1-#33)------------------------―4–164.3.5 数控命令代码替换---------------------------――4–184.4运算功能--------------------------------―ﻩ4–194.5判断和转移至程序分支功能(如果、否则、转至)-----------------ﻩ4–224.6 循环功能(循环条件语句)-------------------------――4–254.7 外部控制功能的抑制命令-------------------------―4–254.8 用户宏程序的注册----------------------------―4–264.8.1 程序带的准备-----------------------------―― 4–26iii4.8.2 程序的注册-------------------------------4–264.8.3程序的编辑-------------------------------ﻩ4–264.8.4 用户宏程序的运行----------------------------- 4– 274.9 系统变量---------------------------------ﻩ4–284.9.1偏置变量(#2000-)---------------------------- ﻩ4–284.9.2加工件偏置(#2501-) ---------------------------ﻩ4–294.9.3电极偏置(#5501-)----------------------------4– 304.9.4 电极基座偏置(#5891-)-------------------------- 4–31iv1.绪言本程序设计手册说明了如何将数控程序应用于放电加工。
日本牧野火花机放电加工代码【大全】
MACHINING加工条件G100、SINGLE MACHINING、单一加工、通常用于初次粗加工G101、BOTTOM STO—SIMPLE、普通镗蚀加工、一般放电加工(粗、精工)G102、BOTTOM STO—COMPLEX、特殊镗蚀加工、电极底为球底、尖底等。
G103、THROUGH MACHINING、通孔加工、既可穿孔也可做倒扣圆坑G104、CORNER MACHINING、清角加工、将原来圆角加工成直角POSITIONING 加工位置模式G110、POINT、一点位置、电极可倾钭、打水口用G111、LINE/GRID、数组/格列、加工孔位成数组分布G112、ARC/CIRCUMFERENCE、圆弧/圆周、加工孔位随圆周分布G113、DISPERSED、任意点位置、孔位不规则排列G114、PLURAL COORDINATES、工件坐标的设定、G50*(G54~G61)、*为0-9 G115、SPLIT POS、分段加工设定、多孔加工时分粗、幼加工MEASURING测量模式G120、EDGE FAC、碰边、自动测边、找角G121、GROVE/HOLE、槽/孔、分内孔(槽)的中心G122、PLATE/COLUMN、板块/柱体、分工件的中心G124、CENTER HOLE、找几个孔的中心、最多可分四个孔G125、MEASURE SPHERE、量球的定位、确定量球的中心为G54G126、ELECTRODE SPHERE、电极的偏差、测量后自动补偿偏差AUXILARY 辅助功能G130、COOD SYS setting PROC、坐标系设置、相当于G92G131、ATC、PROCESSING、自动换刀控制、optional G132、special、SETTIING、特殊设定G133、G、FUNCTION、G功能设置、optionalG134、M FUNCTION、M功能设置、optional。
牧野火花机编程手册
MGH 电源
编程说明手 册
MAKINO 铣床有限公司
7GF括的功能,一般来讲,不能被执行。 2. 本说明手册提供的说明应当得到遵守,否则,其功能可能不能被正确执行,或者
可能对系统产生不利的影响。
3. 根据程序改进的情况可能对本说明手册进行修改,不再另行通知。
3.6 电极补偿-----------------------------------------------
3.6. 电极补偿值的选择(D/H) ----------------------- ―13.6. 电极补偿值的改变 (G10) ------------------------23.6. 电极直径补偿(G40/41/42) ----------------------33.6. 电极长度补偿(G43/44/49) ----------------------34.7 缩放(G47/48) -----------------------------------
程疥块 L 程序块 2
孑程序 fe 间 程序块 n
4 ------
子程序
程序块 1 程序块 2
返回子程序
图 2 . 3 使用子程序的程序结构
2 -2
11
2 . 1 . 1 地址符
当数值和地址构成字时,地址是指示每一个数值的内涵的字符。字也是对数控装置发出命令的最小的有 意义的单元。
定位(G84/85/86) -----------------------------
加工起始点/中断点返回功能(G98/99) 连续程序块(外形)
加工关闭
/开启(G958/959)
旋转拷贝(G26) -------------------------------3.10.6
牧野指导书资料
浸没式电火花加工机指导手册MGH 电源加工技术7GF1-HJR01-0105(E)1. 确定电极收缩量··········································· 1 – 12. 选择初始加工条件········································· 2 – 13. 安装大型电极············································· 3 – 14. 用石墨电极进行无烟加工··································· 4 – 15. 螺旋齿轮加工············································· 5 – 16. 使用电铸电极以及大区域铜电极加工·························· 6 – 17. 高质量表面处理(使用μSC )······························· 7 – 18. 光滑加工和缎面加工········································ 8 – 19. 针孔加工·················································· 9 – 110. 平动螺纹加工············································ 10 – 111. 轮廓加工················································ 11 – 112. 用微细孔机床进行微细孔加工······························ 12 – 113. 用管状电极进行预加工孔加工······························ 13 – 114. 用修整电极进行微细孔加工································ 14 – 115. 反极性冲头加工·········································· 15 – 116. 如何使用定心球·········································· 16 – 117. 旋转加工················································ 17 – 118. 自动换刀装置(ATC)的使用······························· 18 – 119. 不规则形状的加工(底部加工(复杂)菜单)··············· 19 – 120. 智能专家系统············································ 20 – 121. 定位模型的应用·········································· 21 – 122. 数控语言编程实例········································ 22 – 123. 疑难问题················································ 23 – 1历史编号日期目录7GF1-HJR01 第一版1. 确定电极收缩量目录页数1.1 确定粗加工时的电极收缩量…………………………………………………… 1 - 2 1.2 确定精加工时的电极收缩量…………………………………………………… 1 - 7 1.3 普通电极收缩量的实例………………………………………………………… 1 - 111-1毫无疑问,数控电火花加工机能否充分使用取决于电极收缩量的确定。
火花机设备操作指导书
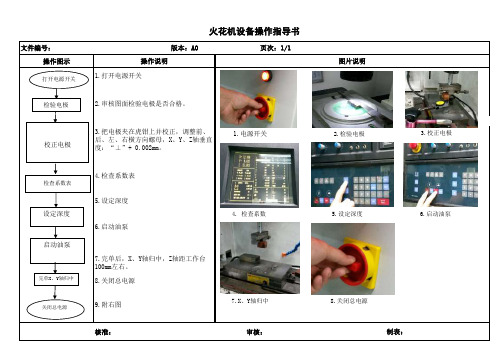
操作图示核准:审核: 3.把电极夹在虎钳上并校正,调整前、后、左、右横方向螺母,X、Y、Z轴垂直度:“⊥”+ 0.002mm。
火花机设备操作指导书操作说明图片说明
文件编号:
版本:A0页次:1/11.打开电源开关2.审核图面检验电极是否合格。
制表:4.检查系数表
5.设定深度
6.启动油泵
8.关闭总电源
9.附右图
7.完单后,X、Y 轴归中,Z 轴距工作台100mm 左右。
校正电极打开电源开关检验电极检查系数表
启动油泵
完单X 、Y 轴归中关闭总电源设定深度
2.检验电极4.检查系数 5.设定深度
3.校正电极
1.电源开关 6.启动油泵7.X 、Y 轴归中8.关闭总电源。
牧野火花机编程手册2
∙执行这一命令,通过对“A"进行角度得参数设置,后进程序得相关指定坐标将被旋转。
∙A1到A9得相应旋转角度分别设置为参数编号.0091至0099。
此外,一旦设定A0得话,就表示取消坐标系统得旋转。
注意1:坐标系统旋转不能通过RESET(复位)键被取消。
注意2:不要在使用模式计划得同时,使用本命令。
举例说明:在往一台机器上安装某个工件时,有可能出现无法与运转轴相平行得现象,或者无法进行较程序开始前在程序工件坐标系统参数与机器轴向参数之间提前留出一个角度得差额。
把电极位置调整到一个工件得基准位置.图3–19程序G92 X0 Y0;ﻩﻩﻩ通过电极位置来设置工件坐标系统G92X0Y0A1;ﻩ坐标系统旋转G92X20、0Y20、0;ﻩ符合程序得坐标系统设置G90G00X0Y0;ﻩﻩP0X20、0Y20、0;ﻩﻩﻩP0 P1X80、0;ﻩﻩﻩﻩP1P2Y50、0; ﻩﻩﻩﻩﻩP2P3X20、0;ﻩﻩﻩﻩﻩP3P4Y20、0;ﻩﻩﻩP4 P1X0Y0;ﻩﻩﻩﻩﻩﻩP1P0G92X20、Y20、A0;取消坐标系统旋转M30;ﻩ3 –203。
3输入部件系统命令相关值得选项这部分说明了一些命令,这些命令使用程序中得数值设置各部件系统,以及它们得输入方法。
表3.2 命令值输入模式功能字状态功能小节G90G91(P)绝对模式增量模式3。
3。
13.3.1绝对坐标/增量坐标(G90/91)功能:ﻩ命令模式选项G90–绝对命令G91–增量命令格式: ﻩG90/91| X-Y—Z-(C-B-W-) |;举例说明:G90 X25.0 Y20.0;G91 X-25。
0Y—20.0;说明:∙通过自工件坐标零点开始得坐标值,绝对命令(G90)指定了所有点得移动.∙通过自当前点开始得一个增加值,增量命令(G91)指定了点得移动.(1)绝对模式(G90X25.0Y20。
0;)(2)增量模式(G91X—25.0Y—20。
0;)ﻩﻩ图注意:当NC部件处于通电状态中,G90与G91之间得选项被设定为一个参数。
牧野机床m代码说明
牧野机床m代码说明牧野机床M代码是牧野机床控制系统中的一种代码,用于控制机床运动、功能和操作。
下面是对牧野机床M代码的详细说明。
1.M代码简介2.M代码分类M代码可以按照功能进行分类,常见的分类有:-主轴控制:用于控制主轴的启停、换刀、冷却等功能,例如M03启动主轴正转,M05停止主轴。
-辅助轴控制:用于控制辅助轴(如刀库)的启停和切换,例如M06刀具切换。
-程序循环:用于设定和控制程序循环,例如M98循环调用子程序。
-坐标系:用于设定和控制坐标系,例如M54选择坐标系。
-程序启动和停止:用于启动或停止程序,例如M30程序结束。
-工具偏置:用于设定和控制工具偏置,例如M41选择刀具偏置。
3.M代码使用规范在使用M代码时,需要遵守一些使用规范,以确保程序的正确运行。
以下是一些常见的规范:-M代码一般以大写字母M开头,后面紧跟一个两位数的代码。
例如M03-M代码可以单独使用,也可以与其他代码组合使用,例如G代码和T 代码。
组合使用时,M代码一般放在前面。
-M代码可以在每行程序的开头使用,也可以在程序中间使用。
当在程序中间使用时,需要放在程序的合适位置,以确保控制系统能够正确识别和执行该代码。
4.M代码示例下面是一些常见的牧野机床M代码示例:-M03:启动主轴正转。
-M05:停止主轴。
-M06:刀具切换。
-M08:打开冷却系统。
-M09:关闭冷却系统。
-M30:程序结束。
-M98:循环调用子程序。
-M54:选择坐标系。
-M41:选择刀具偏置。
以上是对牧野机床M代码的详细说明。
通过合理使用M代码,可以实现机床的精确控制和高效运行。
不同的M代码可以组合使用,以适应不同的加工需求。
在实际应用中,需要根据具体情况选择和合理配置M代码,以达到最佳的加工效果。
MAKINO火花机说明书
G132Q1A32F3
220 620
浅表高速 有差别的低消耗
E12* 速度 E14* 预铣后加工
适于火花面积□3 及以下的 消耗后产生微细差别
M620: Ver.5.007-8
工ห้องสมุดไป่ตู้号.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
光洁度
26 20 15 12 10 8 7 6 5 4 3 2
Ver5.004-8 ’96.12
工序号
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
光洁度
1 0.4 0.2
条件号.
2703 3102 3100
电极消耗
27 100 100
底面余留量
12 4 0
侧面余留量
820
IES:G132Q1A2F3
注解)
必须与时间控制功能一起使用。
这种模式对于 HQSF 不适用。(参见 HQSF 的第 22 页)
侧面余留量
137 110 88 72 58 45 34 24 18 12 7 4
时间控制
□10 □8 □8 □7 □7 □6
电极减 有预处理
寸量 2mm (每侧) 5mm
130 90 80 70 60 50 40 30 130 90 80 70 60 50 40 30 150 100
设置基准 减寸量 粗加工 精加工 0.15 4→11 6→
例) 模型数据 220, 火花面积□2 5 号工序有可能异常放电。 起始时推荐 6 号工序。
● 「设置基准」:以有预处理的情况下设置。
3
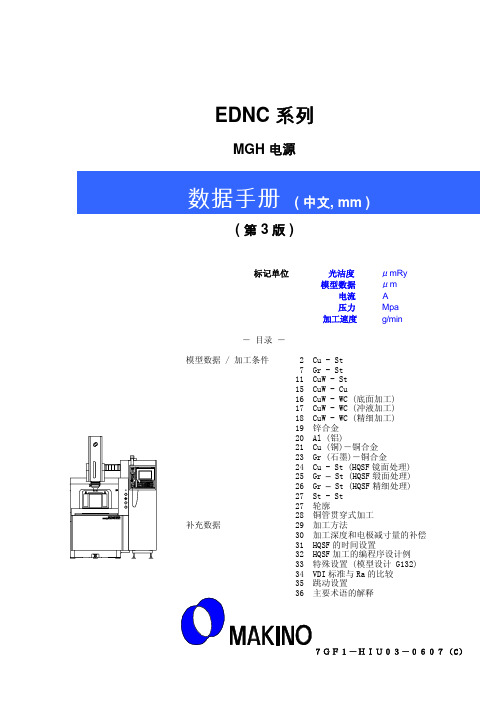
模型数据 / 加工条件
Cu (铜) – St (钢) 3
牧野火花机编程手册(新)
放电加工机MGH 电源编程说明手册MAKINO铣床有限公司7GF1-NF02-0106(E)目录1. 绪言------------------――---------------―1–12. 程序设计基本原理---――--------――--------------―2–1 2.1 程序结构---------―――-----――-------------―2–1 2.1.1 地址符-------------------------------――2–3 2.1.1.1 程序号字-----------------――-----------―― 2–3 2.1.1.2 序列号字-------―――――――----――-----------― 2– 4 2.1.1.3 坐标字--------------------――---------―― 2– 4 2.1.1.4 准备功能字--------------――――-――---------― 2– 6 2.1.1.5 进给功能字----―――――-----------――----――――― 2– 6 2.1.1.6 主轴功能字---------------------――-------― 2– 6 2.1.1.7 电极功能字----------------------――-----―― 2– 6 2.1.1.8 辅助功能字-----------------------――-----― 2– 6 2.1.1.9 访问程序号字/重复计数字------------------――-----2– 6 2.1.1.10 偏置量字--------------------------――---2– 6 2.1.1.11 加工条件字--------------------------――--2– 7 2.1.2 程序块------------------------------――-―2– 7 2.1.2.1 程序块的结束---------------------------――― 2– 7 2.1.2.2 跳过任选程序块----------------------------― 2– 8 2.1.2.3 注释输入-------------------------------― 2– 9 2.2 坐标系统--------------------------------―2–9 2.2.1 机器坐标系统-----------------------------―2–10 2.2.2 工件坐标系统-----------------------------―2– 11 2.2.3 局部坐标系统-----------------------------―2– 122.2.4 绝对值和增量值命令--------------------------―2– 123. 功能字---------------------------------――3– 1 3.1 G/M 代码表-------------------------------―3– 1 3.1.1 G 代码表--------------------------------3– 1 3.1.2 M 代码表-------------------------------―3–4 3.2 坐标系统命令------------------------------―3–6 3.2.1 平面指定(G17/18/19)―――――――――――--------------――3–7 3.2.2 限制区域指定(G22/23)―――――――――――――――---------――― 3– 9 3.2.3 局部坐标系统设置(G52)----――――――――――――――――――――――3–11 3.2.4 机器坐标系统命令(G53)--――――――――――――――――――――――――3–13i3.2.5 工件坐标系统选择(G54–61/G500–509)----------------―――3– 153.2.6 工件坐标系统设置(G92)――――――――――――――――――――――--――3– 183.3 命令值输入单位系统的选择――-----------------------3– 213.3.1 绝对坐标系统/增量坐标系统(G90/91)-------------―――――――3– 223.4 进给命令---------------------------------3– 243.4.1 直线插补(G00/01)---------------------------―― 3– 253.4.2 圆弧插补(G02/03) --------------------------―― 3– 283.4.3 暂停(G04)------------------------------――3– 333.4.4 单向定位(G14)----------------------------――3– 343.4.5 基准点返回(G28/29)--------------------------―― 3– 363.4.6 第2~4基准点返回(G30)------------------------――3– 403.4.7 外部跳过功能(G31)--------------------------――3– 423.4.8 直接进给速度输入(F)--------------------------―3– 443.5 数据设置--------------------------------―3– 453.5.1 直接数据写入(G10)--------------------------――3– 463.6 电极补偿--------------------------------―3– 553.6.1 电极补偿值的选择(D/H)----------――――――――――――――――3– 563.6.2 电极补偿值的改变(G10)--------------――――――――――――3–583.6.3 电极直径补偿(G40/41/42)--------------------―――――3–593.6.4 电极长度补偿(G43/44/49)-----------------------――3– 713.7 缩放(G47/48)-----------------------------―――3– 733.8 旋转(G68/69)-----------------------------―――3– 773.9 镜像(G70/71)-----------------------------―――3– 793.10 封闭循环-------------------------------――3– 813.10.1 模式化加工(G74/75)-------------------------――3– 823.10.2 跳转(G76/77)----------------------――――--――3– 863.10.3 加工(G80/81/82/83)--------------------------―3–963.10.4 定位(G84/85/86)---------------------------―― 3–1033.10.5 加工起始点/中断点返回功能(G98/99)连续程序块(外形)加工关闭/开启(G958/959)--------------――3–107 3.10.6 旋转拷贝(G26)---------------------------――3–1083.11 辅助功能(M)/主轴速度(S)/电极编号(T) 功能----------------―― 3–114ii3.11.1 自动运行停止/终止(M00/01/02/03)------――――――――――――――3–116 3.11.2 接触停止忽略功能(M19)------------------------3–117 3.11.3 主轴极性反转功能(M24/25)---------------------――3–118 3.11.4 绝缘工作液体供应功能(M28/29)---------------------3–118 3.11.5 加工功能(M26/27)-------------------------――3–119 3.11.6 子程序功能(M98/99)--------------------------3–120 3.11.7 电极变换功能(M06/07/08/T)-----------------------3–121 3.11.8 MA/MR设备(MA/MR HEAD) (M57/56/03/05)-----------―――――3–127 3.11.9 DH设备(DH HEAD)功能(M18)――----------------――――3–132 3.11.10 吹送功能(M09/40–49/50/72/73) --------------------3–133 3.11.11(绝缘工作液)槽升降功能(M58/59)-------------------3–136 3.11.12 托盘交换功能(M60)--------------------------3–136 3.11.13 SL功能(M70/71)---------------------------3–138 3.11.14 转轴制动功能(M78/79)-----------------------――3–1393.12 加工条件(E/G10)---------------------------――3–1404. 用户宏程序――――――――-----------------------――4–1 4.1 一般说明---------------------------------4–1 4.1.1 用户宏程序的特点---------------------------――4–1 4.1.2 用户宏程序及其运行模式------------------------――4–2 4.2 子程序――――――----------------------------4–3 4.2.1 子程序访问类型----------------------------――4–3 4.2.2 简单访问(M98/G27)---------------------------- 4–3 4.2.3 参数访问(G65)-----------------------------―4–5 4.2.4 虚拟命令代码访问(参数编号140-171)-------------------―4–6 4.2.5 子程序的嵌套------------------------------―4–9 4.3 参数和变量功能-----------------------------―4–10 4.3.1 变量的用途------------------------------――4–10 4.3.2 变量精确度和常量(VARMAP)----------------------―― 4–14 4.3.3 空变量特性(#0)----------------------------―― 4–15 4.3.4 参数和局部变量(#1 - #33)------------------------―4–16 4.3.5 数控命令代码替换---------------------------――4–18 4.4 运算功能--------------------------------―4–19 4.5 判断和转移至程序分支功能(如果、否则、转至)----------------- 4–22 4.6 循环功能(循环条件语句)-------------------------―― 4–25 4.7 外部控制功能的抑制命令-------------------------―4–25 4.8 用户宏程序的注册----------------------------―4–26 4.8.1 程序带的准备-----------------------------――4–26iii4.8.2 程序的注册-------------------------------4– 26 4.8.3 程序的编辑-------------------------------4– 26 4.8.4 用户宏程序的运行-----------------------------4– 27 4.9 系统变量---------------------------------4– 28 4.9.1 偏置变量(#2000-)----------------------------4– 28 4.9.2 加工件偏置(#2501-) ---------------------------4– 29 4.9.3 电极偏置(#5501-) ----------------------------4– 30 4.9.4 电极基座偏置(#5891-) --------------------------4– 31iv第一章1. 绪言本程序设计手册说明了如何将数控程序应用于放电加工。
牧野火花机编程手册簿

放电加工机MGH 电源编程说明手册MAKINO铣床有限公司7GF1-NF02-0106(E)目录1. 绪言------------------――---------------―1–12. 程序设计基本原理---――--------――--------------―2–12.1 程序结构---------―――-----――-------------―2–12.1.1 地址符-------------------------------――2–32.1.1.1 程序号字-----------------――-----------――2–3 2.1.1.2 序列号字-------―――――――----――-----------―2– 4 2.1.1.3 坐标字--------------------――---------――2– 4 2.1.1.4 准备功能字--------------――――-――---------―2– 6 2.1.1.5 进给功能字----―――――-----------――----―――――2– 6 2.1.1.6 主轴功能字---------------------――-------―2– 6 2.1.1.7 电极功能字----------------------――-----――2– 6 2.1.1.8 辅助功能字-----------------------――-----―2– 6 2.1.1.9 访问程序号字/重复计数字------------------――-----2– 6 2.1.1.10 偏置量字--------------------------――---2– 62.1.1.11 加工条件字--------------------------――--2– 72.1.2 程序块------------------------------――-―2– 7 2.1.2.1 程序块的结束---------------------------―――2– 7 2.1.2.2 跳过任选程序块----------------------------―2– 8 2.1.2.3 注释输入-------------------------------―2– 9 2.2 坐标系统--------------------------------―2–92.2.1 机器坐标系统-----------------------------―2–102.2.2 工件坐标系统-----------------------------―2– 11 2.2.3 局部坐标系统-----------------------------―2– 122.2.4 绝对值和增量值命令--------------------------―2– 123. 功能字---------------------------------――3– 13.1 G/M 代码表-------------------------------―3– 13.1.1 G 代码表--------------------------------3– 13.1.2 M 代码表-------------------------------―3–43.2 坐标系统命令------------------------------―3–63.2.1 平面指定(G17/18/19)―――――――――――--------------――3–73.2.2 限制区域指定(G22/23)―――――――――――――――---------―――3– 9 3.2.3 局部坐标系统设置(G52)----――――――――――――――――――――――3–113.2.4 机器坐标系统命令(G53)--――――――――――――――――――――――――3–13i3.2.5 工件坐标系统选择(G54–61/G500–509)----------------―――3– 153.2.6 工件坐标系统设置(G92)――――――――――――――――――――――--――3– 183.3 命令值输入单位系统的选择――-----------------------3– 213.3.1 绝对坐标系统/增量坐标系统 (G90/91)-------------―――――――3– 22 3.4 进给命令---------------------------------3– 243.4.1 直线插补(G00/01)---------------------------――3– 25 3.4.2 圆弧插补(G02/03) --------------------------――3– 28 3.4.3 暂停(G04)------------------------------――3– 33 3.4.4 单向定位(G14)----------------------------――3– 34 3.4.5 基准点返回(G28/29)--------------------------――3– 36 3.4.6 第2~4基准点返回(G30)------------------------――3– 403.4.7 外部跳过功能 (G31)--------------------------――3– 423.4.8 直接进给速度输入(F)--------------------------―3– 443.5 数据设置--------------------------------―3– 453.5.1 直接数据写入(G10)--------------------------――3– 463.6 电极补偿--------------------------------―3– 553.6.1 电极补偿值的选择(D/H)----------――――――――――――――――3– 563.6.2 电极补偿值的改变(G10)--------------――――――――――――3–583.6.3 电极直径补偿(G40/41/42)--------------------―――――3–593.6.4 电极长度补偿(G43/44/49)-----------------------――3– 713.7 缩放(G47/48)-----------------------------―――3– 73 3.8 旋转(G68/69)-----------------------------―――3– 77 3.9 镜像(G70/71)-----------------------------―――3– 79 3.10 封闭循环-------------------------------――3– 813.10.1 模式化加工(G74/75)-------------------------――3– 823.10.2 跳转(G76/77)----------------------――――--――3– 863.10.3 加工(G80/81/82/83)--------------------------―3–963.10.4 定位(G84/85/86)---------------------------――3–103 3.10.5 加工起始点/中断点返回功能(G98/99)连续程序块(外形)加工关闭/开启(G958/959)--------------――3–107 3.10.6 旋转拷贝 (G26)---------------------------――3–1083.11 辅助功能(M)/主轴速度(S)/电极编号(T) 功能----------------――3–114ii3.11.1 自动运行停止/终止(M00/01/02/03)------――――――――――――――3–116 3.11.2 接触停止忽略功能(M19)------------------------3–117 3.11.3 主轴极性反转功能(M24/25)---------------------――3–118 3.11.4 绝缘工作液体供应功能(M28/29)---------------------3–118 3.11.5 加工功能(M26/27)-------------------------――3–119 3.11.6 子程序功能(M98/99)--------------------------3–120 3.11.7 电极变换功能(M06/07/08/T)-----------------------3–121 3.11.8 MA/MR设备(MA/MR HEAD) (M57/56/03/05)-----------―――――3–1273.11.9 DH设备(DH HEAD)功能(M18)――----------------――――3–132 3.11.10 吹送功能(M09/40–49/50/72/73) --------------------3–133 3.11.11(绝缘工作液)槽升降功能(M58/59)-------------------3–136 3.11.12 托盘交换功能(M60)--------------------------3–136 3.11.13 SL功能 (M70/71)---------------------------3–138 3.11.14 转轴制动功能(M78/79)-----------------------――3–1393.12 加工条件(E/G10)---------------------------――3–1404. 用户宏程序――――――――-----------------------――4–14.1 一般说明---------------------------------4–14.1.1 用户宏程序的特点---------------------------――4–1 4.1.2 用户宏程序及其运行模式------------------------――4–2 4.2 子程序――――――----------------------------4–34.2.1 子程序访问类型----------------------------――4–3 4.2.2 简单访问(M98/G27)----------------------------4–34.2.3 参数访问(G65)-----------------------------―4–54.2.4 虚拟命令代码访问(参数编号140-171)-------------------―4–64.2.5 子程序的嵌套------------------------------―4–9 4.3 参数和变量功能-----------------------------―4–104.3.1 变量的用途------------------------------――4–10 4.3.2 变量精确度和常量(VARMAP)----------------------――4–144.3.3 空变量特性(#0)----------------------------――4–15 4.3.4 参数和局部变量(#1 - #33)------------------------―4–16 4.3.5 数控命令代码替换---------------------------――4–18 4.4 运算功能--------------------------------―4–194.5 判断和转移至程序分支功能(如果、否则、转至)-----------------4–22 4.6 循环功能(循环条件语句)-------------------------――4–25 4.7 外部控制功能的抑制命令-------------------------―4–254.8 用户宏程序的注册----------------------------―4–264.8.1 程序带的准备-----------------------------――4–26iii4.8.2 程序的注册-------------------------------4– 264.8.3 程序的编辑-------------------------------4– 264.8.4 用户宏程序的运行-----------------------------4– 27 4.9 系统变量---------------------------------4– 284.9.1 偏置变量(#2000-)----------------------------4– 284.9.2 加工件偏置(#2501-) ---------------------------4– 294.9.3 电极偏置(#5501-) ----------------------------4– 304.9.4 电极基座偏置(#5891-) --------------------------4– 31iv第一章1. 绪言本程序设计手册说明了如何将数控程序应用于放电加工。
牧野火花机编程手册

7GF1-NF02-0106(E)
警告
1、本说明手册未包括得功能,一般来讲,不能被执行。
2、本说明手册提供得说明应当得到遵守,否则,其功能可能不能被正确执行,或者可能对系统产生不利得影响。
3、根据程序改进得情况可能对本说明手册进行修改,不再另行通知。
4、如果您对本手册有任何不清楚得地方,请与我们联系。
1、绪言------------------――---------------―1–1
2、程序设计基本原理---――--------――--------------―2–1
2、1程序结构---------―――-----――-------------―2–1
3、4、7外部跳过功能(G31)--------------------------――3– 42
3、4、8直接进给速度输入(F)--------------------------―3– 44
3、5数据设置--------------------------------―3– 45
3、5、1直接数据写入(G10)--------------------------――3– 46
3、6电极补偿--------------------------------―3– 55
3、6、1电极补偿值得选择(D/H)----------――――――――――――――――3– 56
2、1、1地址符-------------------------------――2–3
2、1、1、1程序号字-----------------――-----------――2–3
2、1、1、2序列号字-------―――――――----――-----------―2– 4
火花机操作说明书(新)
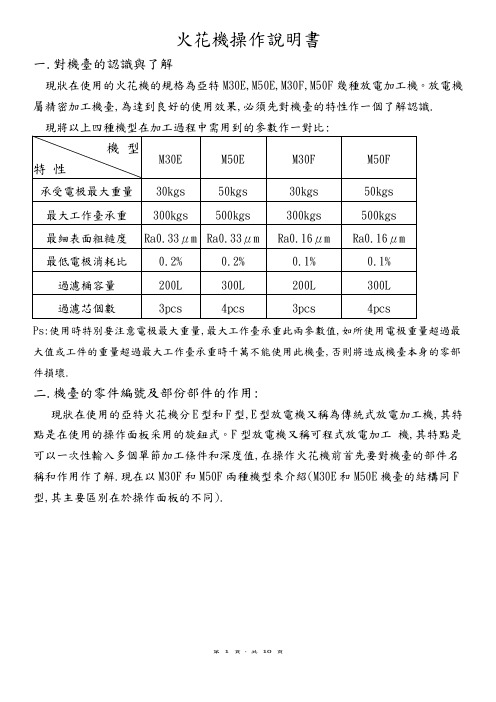
火花機操作說明書一.對機臺的認識與了解現狀在使用的火花機的規格為亞特M30E,M50E,M30F,M50F幾種放電加工機。
放電機屬精密加工機臺,為達到良好的使用效果,必須先對機臺的特性作一個了解認識.Ps:使用時特別要注意電极最大重量,最大工作臺承重此兩參數值,如所使用電极重量超過最大值或工件的重量超過最大工作臺承重時千萬不能使用此機臺,否則將造成機臺本身的零部件損壞.二.機臺的零件編號及部份部件的作用:現狀在使用的亞特火花機分E型和F型,E型放電機又稱為傳統式放電加工機,其特點是在使用的操作面板采用的旋鈕式。
F型放電機又稱可程式放電加工機,其特點是可以一次性輸入多個單節加工條件和深度值,在操作火花機前首先要對機臺的部件名稱和作用作了解.現在以M30F和M50F兩種機型來介紹(M30E和M50E機臺的結構同F 型,其主要區別在於操作面板的不同).三.機臺的維護與保養3.1機臺工作平臺必須保證平整,需每月校正一次,.如磁臺平面度不在0.005以內,則需研磨平臺修整,重新校正;3.2機臺無生銹現象,保持機身乾凈,無油污;3.3觀察壓力表的讀數是否正常(0.7~1.0kg/cm2),馬達幫浦的轉向是否同箭頭方向保持一致(若相反也是壓力表讀數偏小的原因);3.4如圖一中(A)的指示的部位—手動注油器,為導軌和方螺紋注入潤滑油.保證機臺良好的潤滑性.隨時注意注油器油標的高低,及時加油,如機臺使用頻繁應保證每天注油次數最少2次;3.5每週觀察火花油槽內之油量,有無低於標準值,若低於標準值應及時加油;3.6如圖二中絕緣液的清潔與更換:先將機臺油桶內的油抽至一乾凈桶內,抽至不能再抽時將圖中(1)螺釘旋開,將油放入盒子中,待放完后再將(2)大螺釘鬆開,將(3)退開后將過濾蕊(4)拉出,將蕊桶擦拭乾凈后換上新過濾蕊,密封好后換上新油(或待原油完全澄清后再倒回機臺內);3.7機臺三級保養:一級保養: (1)每天保證機臺無油污、積塵等現象;(每天) (2)機臺不用時保證各部件無生銹現象;(3)導軌每天按時上油,保證正常作業.二級保養: (1)定期檢查油路是否暢通;(每月) (2)定期檢查機臺工作平面水平度;(3)定期添加機臺導軌油;(4)定期檢查各部件有無損壞.三級保養: (1)更換新的火花油;(每年) (2)更換機臺工作平臺.四.機臺X、Y、Z三軸精度校正及磁臺平面度校正4.1 X、Y、Z三軸精度校正(讀數)將機臺X(或Y)輛方向校正一平面度較好的擋塊,固定於平臺上,利用50mm、100mm、150mm、200mm的標準塊規,將塊規的一端緊貼擋塊的校正面,然後用校表(千分表)使表針指向一固定讀數(如40處),重復多次,看顯示器讀數是否相同,若幾次都相同,再將顯示器該軸的讀數歸零,然後校表保持絕對不動,將校表移至塊規的另一端,用同一個點碰塊規另一端,重復幾次,看顯示器的讀數是否相同.讀數若大於或小於該塊規的寸法則表示該軸的讀數精度不準確(視差值大小而論,若差值較大則應整修機臺).Z軸是將塊規置於平臺上(平臺要求平面度較好),用上述同樣的方法觀察其讀數,視讀數差值的大小而論是否應調整機臺.4.2 X、Y、Z三軸垂直度校正保證磁臺平面度的前提下,將一標準的垂直度校正器置於平臺上,將校正器的一邊校正平行,再檢查與之垂直的另一邊,若讀數不相同,則表示該機臺X、Y 軸之間存在一定的夾角(不垂直),視差值大小考慮調整機臺.Z軸同上,若已保證磁臺平面度,而校正Z軸時出現差值,則應視差值大小考慮修整機臺.五.操作面板說明5.1 E型火花機操作面板認識六.操作步驟6.1 E型操作步驟說明:6.1.1打開電源總開關,使用“REF”鍵使機臺回復至工作座標狀態;6.1.2將平臺整理平整、乾凈;6.1.3將工件放於平臺上校正並吸磁固定;6.1.4將電極按圖紙相應的形狀、方向裝夾於機床夾頭上,並校正電极;6.1.5尋電极X、Y方向之中心點:調整條件為OA(20~45)us;6.1.6選擇极性:電極為正、工件為負;6.1.7尋邊(分中方式)a.首先用電极M邊尋工件CDEF面按“O”、“ENT”歸零,同時連續按“L”、“ENT”使分中鍵作用;b.然后用電極N邊尋工件CDEF面,得電極直徑Φ(方法:用墊塊緊貼工件CDEF面,電極N邊碰墊塊與CDEF面緊貼的面),(PS:此時墊塊一定要貼緊工件的面,否則尋邊出來的結果是錯誤的).按“ENT”使電極分中,找出電極此方中心,與CDEF面重合;c.用同樣的方法尋出與ABDC邊相重合的電極中心,此時當座標移至(0.0)時,電极中心與工件基準點重合;d.用電極最高點尋工件ACEG面設放電深度Z(按實際尺寸設置).(PS:設值時當電流小於或等於3A時應用所需的定位電流“放電最后所要求的條件”設置深度,並且至細放預留量時應將工件和電極擦拭乾凈重設一次深度,否則由於電極表面附碳的原因會使深度加工過深);e.將座標移至(a、b)位置,選擇適當的放電條件、衝油、放電.6.2 F型操作步驟說明6.2.1打開電源總開關,並按下旁邊的紅色按鈕,待熒幕上出現畫面(參數表); 6.2.2將平臺整理平整乾凈;6.2.3將工件置於平臺上校正並吸磁固定;6.2.4參照圖紙和放電指示單將電極按正確的形狀及方向裝夾於機頭夾頭上,並校正電極;6.2.5設定好尋邊條件OA(20~45)us,按要求的尋邊方式尋邊;6.2.6選擇极性:電極(正)、工件(負);6.2.7尋邊(分中)a.首先用電極M邊尋工件CDEF面按“←”將游標移至X處再依次按“X”、“O”、“ENT”;將此邊零點找出;b.然後用電極N邊尋工件CDEF面,得電極直徑Φ(方法:用墊塊緊貼工件CDEF面,電極N邊碰墊塊與CDEF面緊貼的面)按“1/2”、“ENT”使電極分中,找出電極此方中心與CDEF面重合;c.用同樣的方法尋出與ABDC邊相重合的電極中心,此時當座標移至(0.0)時,電极中心與工件基準點重合;d.深度的設置(分兩種方法:手動和自動)(1)手動:先將電極移至距要求設深度的工件表面2mm左右,再按放電開關,使工件和電極完全接觸時(停止放電蜂嗚器發出響聲時),利用7.1的方式將游標移至Z處再依次按“Z”、“所需設置的深度值”、“ENT”設置完成深度,此時提升為“-”,下降為“+”(2)自動:先將電极移至距工件設深度表面2mm處.再將游標移至“”處,按“INC”(或DEC),使之設置為ON,再按“ENT”.開始設置深度.當聽到電极和工件之間產生4次短路響后,機頭自動提升5mm,將此面定為O面,然后在加工深度設定“Z DEPTH”.將游標移至對應的加工單節序號按“Z”、“所需加工深度值”“ENT”設置所需深度.此時若完工面高於0點;則應輸入正值,若完工面低於0點,則應輸入負值.且必須是上單節設置的深度數值大於下一單節,工作才會繼續.(即提升為“+”;下降為“—”).e.將座標移至(a.b)位置,選擇適當的放電條件、衝油、放電.。
牧野a120nx说明书

牧野a120nx说明书
1.当机床电源打开或按重置键时,标有"* "符号的G代码被激活,即缺省状态。
2 . 不同组的G代码可以在同一程序段中指定;如果在同一程序段中指定同组G代码,.最后指定的G代码有效。
3.由于电源打开或重置,使系统被初始化时,已指定的G20或G21代码保持有效.
4.由于电源打开被初始化时,G22代码被激活;由于重置使机床被初始化时, 已指定的G22或G23代码保持有效.
对刀方法:部品放入夹具--主轴正转--刀类轻触部品--试车一小段外圆--取出部品量测--输入刀具形状补正[例如测得Φ50.0,在相应的地址栏输入X50.0(西安数控车床是输入X-50.0)],Z轴相似,不用再说了吧。
编程方法:法兰克系统车床切记不可漏写小数点,否则会以μm计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
1.绪言
2序结构
2.1.1 地址符
2.1.1. 程序号字 12.1.1. 序列号字 22.1.1. 坐标字 32.1.1. 准备功能字 42.1.1. 进给功能字 52.1.1. 主轴功能字 62.1.1. 电极功能字 72.1.1. 辅助功能字 82.1.1. 访问程序号字/重复计数字 29.1.1.10 偏置量字
定位(G84/85/86) -----------------------------
加工起始点/中断点返回功能(G98/99) 连续程序块(外形)
加工关闭
/开启(G958/959)
旋转拷贝(G26) -------------------------------3.10.6
3.11 辅助功能(M)/主轴速度(S)/电极编号(T)功能
3.6 电极补偿-----------------------------------------------
3.6. 电极补偿值的选择(D/H) ----------------------- ―13.6. 电极补偿值的改变 (G10) ------------------------23.6. 电极直径补偿(G40/41/42) ----------------------33.6. 电极长度补偿(G43/44/49) ----------------------34.7 缩放(G47/48) ---------------------------1 3 -22 3 -24 3 -25 3 -28 3 -33 3 -34 3 -36 3 -40 3 -42 3 -44 3 -45 3 -46 3 -55 3 -56 3 -58 3 -59 3 -71 3 -73 3 -77 3 -79 3 -81 3 -82 3 -86 3 -96 3 -103
放电加工 机
MGH 电源
编程说明手 册
MAKINO 铣床有限公司
7GF括的功能,一般来讲,不能被执行。 2. 本说明手册提供的说明应当得到遵守,否则,其功能可能不能被正确执行,或者
可能对系统产生不利的影响。
3. 根据程序改进的情况可能对本说明手册进行修改,不再另行通知。
2.1.1.11 加工条件字
2.1.2 程序块
2.1.2.1 程序块的结束
2.1.2.2 跳过任选程序块
2.1.2.3 注释输入
2.2 坐标系统
2.2. 机器坐标系统 12.2. 工件坐标系统 22.2. 局部坐标系统 32.2. 绝对值和增量值命令 34.功能字
3.1 G/M 代码表
3.1.1 G 代码表
4
3.2.5 工件坐标系统选择 (G54 -61/G500 -509) -----------
3.2.6 工件坐标系统设置(G92) --------------------------
3.3 命令值输入单位系统的选择一一 --------------------------
3.3.1 绝对坐标系统/增量坐标系统 (G90/91) --------------
3.10. 13.10. 23.10. 33.10. 43.10. 5
模式化加工(G74/75) ---------------------------
跳转(G76/77) --------------------------------
加工(G80/81/82/83) --------------------------
63.4. 73.4.
外部跳过功能(G31) ----------------------------直接进给速度输入(F) ----------------------------
38.5 数据设置-----------------------------------------------
3.5.1 直接数据写入(G10)------------------------------
3.8 旋转(G68/69) -----------------------------------
3.9 镜像(G70/71) -----------------------------------
3.10 封闭循环 ---------------------------------------------
3 -107 3 -108 3 -114
5
3.11. 自动运行停止/终止(M00/01/02/03)
23.4. 暂停(G04) ------------------------------------
33.4. 单向定位(G14) ---------------------------------
43.4. 基准点返回(G28/29) ----------------------------
53.4. 第 2〜4 基准点返回(G30) -------------------------
3.1.2 M 代码表
3.2 坐标系统命令
3.2. 平面指定(G17/18/19) 13.2. 限制区域指定(G22/23) 23.2. 局部坐标系统设置(G52)—— 33.2. 机器坐标系统命令3 2 -4 2 -4 2 -6 2 -6 2 -6 2 -6 2 -6 2 -6 2 -6 2 -7 2 -7 2 -7 2 -8 2 -9 2 -9 2 TO 2 -11 2 -12 2 -12 3 -1 3 -1 3 -1 343 63 73 -9 3131-13
3.4 进给命令-----------------------------------------------
3.4. 直线插补(G00/01) ------------------------------
13.4. 圆弧插补(G02/03) ------------------------------