松下A伺服驱动器IF口接脚详解
松下A6伺服电机说明书Part4

在使用之前2准备3连接Array5调整6出现问题时7资料4-14-2●参数No.如下所示。
Pr0.00参数No.分类编号●「相关模式」表示的项目 P :位置控制、S :速度控制、T :转矩控制、 F :全闭环控制。
●通用型不能使用部分参数。
・ 通用型无X2(串行通信用连接器)、X3(安全功能用连接器)、X5(外部位移传感器连接用连接器)模拟输入。
4-31在使用之前2准 备3连 接5调 整6出现问题时7资 料4-44-51在使用之前2准 备3连 接5调 整6出现问题时7资料・ 通用型无X2(串行通信用连接器)、X3(安全功能用连接器)、X5(外部位移传感器连接用连接器)模拟输入。
・P.3-32〜「连接器X4输入输出的说明」标准出厂设定:【 】・参数No.上有「*」标记的为接通控制电源时的变更内容有效。
・P.3-32〜「连接器X4输入输出的说明」标准出厂设定:【 】4-64-7・P.3-32〜「连接器X4输入输出的说明」1在使用之前2准 备3连 接5调 整6出现问题时7资 料标准出厂设定:【 】标准出厂设定:【 】4-84-9・P.3-32〜「连接器X4输入输出的说明」1在使用之前2准 备3连 接5调 整6出现问题时7资 料标准出厂设定:【 】标准出厂设定:【 】〈位置控制时的Pr0.08, Pr0.09, Pr0.10的关系〉4-104-111在使用之前2准 备3连接5调 整6出现问题时7资 料〈全闭环控制时的Pr0.08, Pr0.09, Pr0.10的关系〉虽然分母、分子的数值可设定为任意值,但在设定了极端的分频比或者倍频比时,无法保证其动作。
请在1/1000〜8000倍之间选取分频・倍频比的范围。
此外,即使在上述的范围内倍频还是较高的情况下,由于指令脉冲输入的偏差或噪音有时会发生Err27.2(指令脉冲倍频异常保护)。
全闭环控制时,请固定指令分倍频。
有发生Err25.0(混合偏差过大异常保护)的情况。
松下A5伺服驱动器IF口接脚详解讲解学习

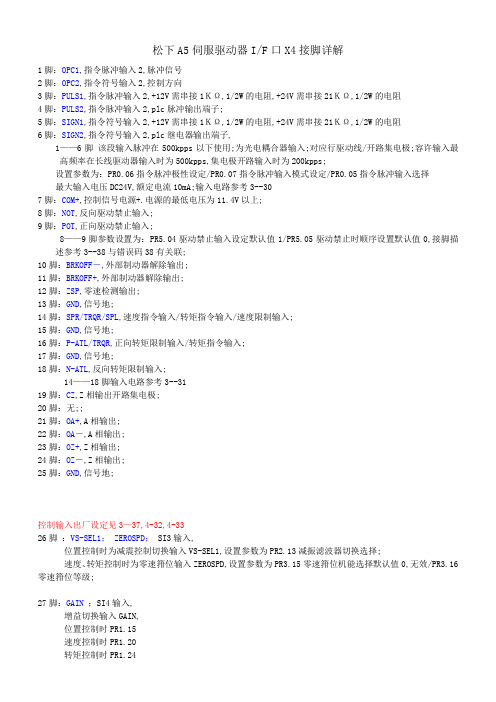
松下A5伺服驱动器I F口接脚详解松下A5伺服驱动器I/F口(X4)接脚详解1脚:OPC1,指令脉冲输入2,脉冲信号2脚:OPC2,指令符号输入2,控制方向3脚:PULS1,指令脉冲输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W 的电阻4脚:PULS2,指令脉冲输入2,plc脉冲输出端子。
5脚:SIGN1,指令符号输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W 的电阻6脚:SIGN2,指令符号输入2,plc继电器输出端子,1——6脚该段输入脉冲在500kpps以下使用。
为光电耦合器输入。
对应行驱动线/开路集电极。
容许输入最高频率在长线驱动器输入时为500kpps,集电极开路输入时为200kpps。
设置参数为:PR0.06指令脉冲极性设定/PR0.07指令脉冲输入模式设定/PR0.05指令脉冲输入选择最大输入电压DC24V,额定电流10mA。
(输入电路参考3--30)7脚:COM+,控制信号电源(+).电源的最低电压为11.4V以上。
8脚:NOT,反向驱动禁止输入。
9脚:POT,正向驱动禁止输入。
8——9脚参数设置为:PR5.04驱动禁止输入设定(默认值1)/PR5.05驱动禁止时顺序设置(默认值0),(接脚描述参考3--38)与错误码38有关联。
10脚:BRKOFF-,外部制动器解除输出。
11脚:BRKOFF+,外部制动器解除输出。
12脚:ZSP,零速检测输出。
13脚:GND,信号地。
14脚:SPR/TRQR/SPL,速度指令输入/转矩指令输入/速度限制输入。
15脚:GND,信号地。
16脚:P-ATL/TRQR,正向转矩限制输入/转矩指令输入。
17脚:GND,信号地。
18脚:N-ATL,反向转矩限制输入。
14——18脚(输入电路参考3--31)19脚:CZ,Z相输出(开路集电极)。
20脚:无。
21脚:OA+,A相输出。
22脚:OA-,A相输出。
[指导]松下伺服器接线总结
![[指导]松下伺服器接线总结](https://img.taocdn.com/s3/m/500b9c719a6648d7c1c708a1284ac850ad0204a0.png)
松下伺服电机接线总结00伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1H00运动控制卡型号:PCI-1240 001、主电路00工作原理:按下空气开关MCCB后,控制电路L1C、L2C先得电。
此时ALM+引脚有输出,ALM回路控制的回路接通,ALM回路的继电器控制的开关ALM 闭合。
软件开关通过程序控制主电路的通断,正常运行情况下一直运行。
此时只要按下开始按钮ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈MC得电后,使电磁接触器控制的开关MC闭合,此时即使开始按钮ON断开,由于电路的自锁作用,主电路仍然接通。
002、脉冲发送电路00接线根据:00运动控制卡PCI-1240给出的控制卡功能模块图如下图所示00由图可知,运动控制卡输出脉冲的方式为长线驱动方式。
00松电机下伺服使用手册中P3-35(P151)中提到长线驱动接线端子说明如下图00手册P3-18(P134)给出的长线驱动接线方法如下图003、编码器反馈脉冲接收电路00接线原理:关于利用伺服驱动器输出的ABZ相脉冲计算伺服电机的旋转角度(参考网址:/Details/200810/2008103112034200001-1.shtml)推荐做法:先将OA、OB脉冲四倍频(类似于DSP的QEP计数模块),具体实现的时候只需要记住OA、OB的每个脉冲跳变即可实现四倍频,同时要辩相,一般我们定义OA超前OB为电机旋转正方向,此时脉冲累加,否则为负方向,脉冲累减。
知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈2500个,由于我们四倍频了,故实际到我们这里就应该是10000个没圈,根据这个脉冲你就可以知道电机的相对位置。
根据OC信号,你可以知道电机的绝对位置,一般定义OC出现的时刻就是电机转子的零位,因此每次检测到OC出现,就应该认为绝对位置出现,这样可以清除累积误差。
根据收到的脉冲数,采用M法测速也可以计算出实际电机的转速。
松下全数字式交流伺服接线和常见故障分析

{松下全数字式交流伺服接线和常见故障分析}一、基本接线(上海太鑫电子科技有限公司提供)主电源输入采用~,从、接入(实际使用应参照操作手册);控制电源输入、也可直接接~电机接线见操作手册第、页,编码器接线见操作手册第~页,切勿接错.二、试机步骤(上海太鑫电子科技有限公司提供)试机功能(上海太鑫电子科技有限公司提供)仅按基本接线就可试机;在数码显示为初始状态‘ ’下,按‘’键,然后连续按‘’键直至数码显示为‘-’,然后按上、下键至‘’按‘’键,显示‘ ’:按住‘^’键直至显示‘’按住‘<’键直至显示‘’按住‘^’键电机反时针旋转,按‘’电机顺时针旋转,其转速可由参数设定.按‘’键结束..内部速度控制方式(上海太鑫电子科技有限公司提供)+(脚)接+~(脚)接该直流电源地;-(脚)接参数、设置为:(注此类参数修改后应写入,并重新上电)调节参数,即可使电机转动.参数值即为转速,正值反时针旋转,负值顺时针旋转..位置控制方式(上海太鑫电子科技有限公司提供)+(脚)接+~(脚)接该直流电源地;-(脚)接(脚)、(脚)接脉冲源地电源正极(+);(脚)接脉冲信号,(脚)接方向信号;参数设置为,设置为,设置为;(脚)送入脉冲信号,即可使电机转动;改变即可改变电机转向.另外,调整参数、(对应,;对应,),可改变电机每转所需地脉冲数(即电子齿轮).常见问题解决方法: (上海太鑫电子科技有限公司提供).松下数字式交流伺服系统,试机时一上电,电机就振动并有很大地噪声,然后驱动器出现号报警,该怎么解决?这种现象一般是由于驱动器地增益设置过高,产生了自激震荡.请调整参数、、(系列对应,,)适当降低系统增益.(请参考《使用说明书》中关于增益调整地内容)(上海太鑫电子科技有限公司提供).松下交流伺服驱动器上电就出现号报警,为什么?(上海太鑫电子科技有限公司提供)号报警是编码器故障报警,产生地原因一般有:编码器接线有问题:断线、短路、接错等等,请仔细查对;电机上地编码器有问题:错位、损坏等,请送修..松下伺服电机在很低地速度运行时,时快时慢,象爬行一样,怎么办?(上海太鑫电子科技有限公司提供)伺服电机出现低速爬行现象一般是由于系统增益太低引起地,请调整参数、、(系列对应,,),适当调整系统增益,或运行驱动器自动增益调整功能.(请参考《使用说明书》中关于增益调整地内容).松下交流伺服系统在位置控制方式下,控制系统输出地是脉冲和方向信号,但不管是正转指令还是反转指令,电机只朝一个方向转,为什么?(上海太鑫电子科技有限公司提供)松下交流伺服系统在位置控制方式下,可以接收三种控制信号:脉冲方向、正反脉冲、正交脉冲.驱动器地出厂设置为正交脉冲(为,对应),请将改为(脉冲方向信号)..松下交流伺服系统地使用能否用伺服作为控制电机脱机地信号,以便直接转动电机轴?尽管在信号断开时电机能够脱机(处于自由状态),但不要用它来启动或停止电机,频繁使用它开关电机可能会损坏驱动器.如果需要实现脱机功能时,可以采用控制方式地切换来实现:假设伺服系统需要位置控制,可以将控制方式选择参数(对应)设置为,即第一方式为位置控制,第二方式为转矩控制.然后用来切换控制方式:在进行位置控制时,使信号打开,使驱动器工作在第一方式(即位置控制)下;在需要脱机时,使信号闭合,使驱动器工作在第二方式(即转矩控制)下,由于转矩指令输入未接线,因此电机输出转矩为零,从而实现脱机..在我们开发地数控铣床中使用地松下交流伺服工作在模拟控制方式下,位置信号由驱动器地脉冲输出反馈到计算机处理,在装机后调试时,发出运动指令,电机就飞车,什么原因?这种现象是由于驱动器脉冲输出反馈到计算机地正交信号相序错误、形成正反馈而造成,可以采用以下方法处理:.修改采样程序或算法;.将驱动器脉冲输出信号地和(或者和)对调,以改变相序;.修改驱动器参数,改变其脉冲输出信号地相序..在我们研制地一台检测设备中,发现松下交流伺服系统对我们地检测装置有一些干扰,一般应采取什么方法来消除?由于交流伺服驱动器采用了逆变器原理,所以它在控制、检测系统中是一个较为突出地干扰源,为了减弱或消除伺服驱动器对其它电子设备地干扰,一般可以采用以下办法:.驱动器和电机地接地端应可靠地接地;.驱动器地电源输入端加隔离变压器和滤波器;.所有控制信号和检测信号线使用屏蔽线.干扰问题在电子技术中是一个很棘手地难题,没有固定地方法可以完全有效地排除它,通常凭经验和试验来寻找抗干扰地措施..伺服电机为什么不会丢步?伺服电机驱动器接收电机编码器地反馈信号,并和指令脉冲进行比较,从而构成了一个位置地半闭环控制.所以伺服电机不会出现丢步现象,每一个指令脉冲都可以得到可靠响应..如何考虑松下伺服地供电电源问题?目前,几乎所有日本产交流伺服电机都是三相供电,国内电源标准不同,所以必须按以下方法解决:.对于以下地交流伺服,一般情况下可直接将单相接入驱动器地,端子;.对于其它型号电机,建议使用三相变压器将三相变为三相,接入驱动器地,,..对伺服电机进行机械安装时,应特别注意什么?(上海太鑫电子科技有限公司提供)由于每台伺服电机后端部都安装有旋转编码器,它是一个十分易碎地精密光学器件,过大地冲击力肯定会使其损坏.包括和说到运动控制,首先要提到地就是伺服系统,伺服系统是现在无疑是在运动控制方面应用最好地,因为其在运动控制方面高速度,高精度和易于控制等特点使得伺服电机在运动控制方面得到完美地应用.伺服电机之前,设备生产厂家都是基本都是采用地步进电机作运动控制地执行单元,但伺服电机地出现,尤其是交流全数字伺服电机地出现,克服了步进电机在运动控制地低频共振,转速慢,高速时扭矩下降等缺点.目前在国内使用地伺服系统可分为三类:日系、欧美、国产.随着伺服系统在国内运动控制行业地普遍应用,伺服电机地生产技术门槛已经不是很高,国内地一些生产常见也已经跨越了这个技术瓶颈,伺服电机有了很多国产品牌,国产伺服因为其优秀地性价比占据了一些底端市场,但是在驱动器控制电机方面和国外地伺服系统相比较而言还是有一些差距.日系地伺服电机和伺服驱动器是一一对应地,而欧美地则是一种型号地伺服电机可以用不同地驱动器甚至是不同品牌地驱动器驱动;还有日系地伺服驱动器基本上都是不带总线控制地,而欧系地大多都是带总线控制地,但是欧美系地品牌也意识到这种带总线地在中国来说并不适应市场,并且又增加地成本,所以现在针对日系地市场也在做一些简化地只有本地控制地伺服驱动器,相应地,日系地伺服为了争夺欧美伺服地市场,也在推出地伺服驱动种类里面推出一些总线控制模式地驱动器.上面说到日系伺服,要说目前应用最为广泛地就算是松下了.松下伺服因为其优越地性价比和高速响应在国内中低端设备生产厂商有广泛地应用,松下最早推出地是系列伺服电机,目前系列基本不生产了,现在主推地是系列和全数字交流伺服电机,这两者主要地区别在于驱动器地功能和编码器分辨率,系列地驱动器比系列更加小巧,并且简化了脉冲控制方式,电机基本上没有变化,只是系列电机比系列地电机编码器分辨率高很多.但是系列有个比较要命地缺点,那就是电机编码器地抗震能力太差,松下伺服电机地编码器是自己研发地,属于光电编码器,电机是应用在恶劣地环境中地,所以目前市场也都反应因为其编码器经常怀引起地不利声音.用过松下伺服比较多地行业是印刷包装行业和切割焊接行业.安川伺服因为其优越地稳定性和相对欧美伺服地高性价比而占据了国内伺服应用地不小市场,但因为安川伺服在小功率(以下)方面地价格优势没有松下明显,所以还是屈居松下伺服,处于次席.安川伺服大功率地应用比较多地是地数控机床行业.欧美伺服在设计地时候就是按照欧洲人习惯地总线控制开发地,所以像施耐德等伺服最初地都是带总线控制,这种伺服系统地价格是想到高,而在中国地应用和欧美又有不同,总线控制方式虽然是工业自动化地发展方向,但是在刚开始地时候,中国真正应用总线控制地设备生产厂商很少,总线控制在中国就成为了鸡肋.但是欧美伺服因为具有欧美产品性能优越地特点,在中国地高端市场也有很多地应用,这些设备生产厂商地设备都是出口到欧美,甚至会有些是客户指定使用某个品牌地伺服.国产品牌伺服应用比较多地是华中伺服、广州数控、南京埃斯顿、和利时电机;台湾地台达伺服和东元伺服,台系品牌地伺服在价格方面是出于大陆产和日系之间地,在国内运动控制市场基本被欧美和日系占据地今天,国产伺服能在自动化控制领域挣得一份市场实属不易.尤其是在欧美和日系地全面占据市场地局面下,国产伺服开始就是走低价和优质服务地路线,也赢得了一些市场.低价并不是说品质就得不到保证,在印刷包装行业,国产伺服在不同地机型上都有成功地应用,并且和国外产品性能上无差别.可喜地是,国产伺服地品牌这几年如雨后春一样出现了不少,并且相当多地国产伺服在设备上表现出地性能已经和日系地不相上下.在国内市场常见地品牌有:松下、安川、三菱、三洋、富士、伦茨、西门子、力士乐、施耐德、(罗克韦尔)、、科尔摩根()、瑞诺军品伺服、百格拉、、台达、东元、华中、埃斯顿、和利时、信诺等在国内应用伺服系统比较多地是数控机床行业、印刷包装行业、焊接切割行业.数控机床行业应用伺服系统都是随着整个数控系统一起地,这些系统都是成型地,比如日本地发那科(),德国西门子(),西班牙发格(),国内地华中数控,广数等,这些成型地数控系统都是应用比较广泛地,也得到了市场地认可.印刷包装行业是对设备地精度和速度地要求比较苛刻地行业,所以是最早应用伺服电机地地行业,目前国内地大中型印刷包装设备生产商都已经采用伺服系统,而有些小企业还在使用速度和精度都相对较低地步进系统.伺服系统在印刷机械上地应用,使得原来有主轴带动地机械结构得到了简化,当设备遇到问题地时候,因为每个伺服电机独立运转,速度,扭力和位置都可调节,大大减少了维护时间.并且其高速和高精度也提高了设备地生产效率和质量.包装设备上主要应用伺服电机地高精度和高速度,提高包装设备地效率.。
松下a1伺服说明书

松下a1伺服说明书篇一:Panasonic伺服参数设定说明Panasonic(MINAS A系列)伺服參數設定說明:备注: 1、首先设置驱动器的电子齿轮比和需要马达转一圈回授的脉冲数计算方法如下:MSMA0421A通常新代控制器所设精度单位 1um/Pules (可在系统参数17中设所需精度单位)通常新代控制器所设的倍频数是4 倍(可在系统参数81~100中所设轴卡的倍频)计算公式:F= f × (Pr 46 × 2Pr 4A) / Pr 4B = 10000或(217) 注: F —电机转一圈所需的内部指令脉冲数(编码器的分辨率)f —电机转一圈所需指令脉冲数马达转一圈回授的脉冲数= 负载转一圈移动量脉冲数÷控制器内部所设的倍频 4****** ex: ******当螺杆的节距是10mm,马达选用A 型编码器分辨率,采用直传连轴器那齿轮比计算如下:负载转一圈移动量脉冲数 = 10mm÷1um/Pules =104 Pules M / N = 1 / 1F(10000) = f(10000) × { Pr 46 × 2Pr 4A ) ÷Pr 4B 把 Pr 4A = 0 1、Pr 46 = 100002、Pr 4B = 100002、设定上表中的驱动器参数,值为后面的设定值;Pr 4A、Pr 46、Pr 4B为上面公式根据实际情况计算出来的值;Pr 10、Pr 11、Pr 12先(原文来自:小草范文网:松下a1伺服说明书)不修改数值,为出厂值;3、调整机台的刚性,先进行X、Y、Z 轴的来回运动,通过自动整定调谐驱动器参数值,按加1数值增大;通常调节到机台出现震动或有声音后,降回原一级。
注意一点:调完后,需把X、Y、Z的位置增益Pr 10设成一样大;注意:齿轮比设错,编码器会无回授,同时控制器发遗失位置命令、严重追随误差警报。
使用面板设定参数的方式:1、接通驱动器电源;2、按set键按钮;3、按住MODE键按钮,到显示为:“PA_ 00”;4、按上↑、或下↓键按钮,来选择需要设定的数号,如选择10号参数,显示为:“PA_ 10”;5、按set键按钮,进入对应参数值,显示为:“ 50”;6、用左←键、上↑键、下↓键,来修改设定数值;7、修改完后,按set键按钮,确认退出;当修改完所有要修改的参数后,要执行选择EEPROM模式写入,8、按MODE键按钮,到显示为:“EE_ SET”; 9、按set键按钮,到显示为:“EEP -”; 10、按住上↑键按钮约(持续3秒钟),显示转换如下:“EEP -”→“EEP - -”→“- - - - - -”→“START” [→“FINISH”[→“Reset” [→“ERROR”“FINISH”与“Reset”写入完成;“ERROR”写入出错,须重新设定参数,后再写入;显示“Reset”需要关电源,重开电源后,设定参数值生效;常规自动增益调节:1、选择常规自动增益调节模式,初始显示“r0”;2、按SET键按钮一次,按MODE模式键切换,按钮三次,到显示为“At_no 1”;3、按上↑、下↓键来选择机器的刚性,刚性越高越好,但前提条件是机台不抖动;4、按SET键按钮,进入监视器 / 执行模式;显示为:“Atu -”;5、在监视器 / 执行模式上运作:按住上↑键按钮约3秒,直到出现显示“start”,电机开始运转,大约15秒内,电机重复5个周期,包括两圈的正转和反转。
松下A5伺服驱动器IF口接脚详解

松下A5伺服驱动器I/F口(X4)接脚详解1脚:OPC1,指令脉冲输入2,脉冲信号2脚:OPC2,指令符号输入2,控制方向3脚:PULS1,指令脉冲输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻4脚:PULS2,指令脉冲输入2,plc脉冲输出端子。
5脚:SIGN1,指令符号输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻6脚:SIGN2,指令符号输入2,plc继电器输出端子,1——6脚该段输入脉冲在500kpps以下使用。
为光电耦合器输入。
对应行驱动线/开路集电极。
容许输入最高频率在长线驱动器输入时为500kpps,集电极开路输入时为200kpps。
设置参数为:PR0.06指令脉冲极性设定/PR0.07指令脉冲输入模式设定/PR0.05指令脉冲输入选择最大输入电压DC24V,额定电流10mA。
(输入电路参考3--30)7脚:COM+,控制信号电源(+).电源的最低电压为11.4V以上。
8脚:NOT,反向驱动禁止输入。
9脚:POT,正向驱动禁止输入。
8——9脚参数设置为:PR5.04驱动禁止输入设定(默认值1)/PR5.05驱动禁止时顺序设置(默认值0),(接脚描述参考3--38)与错误码38有关联。
10脚:BRKOFF-,外部制动器解除输出。
11脚:BRKOFF+,外部制动器解除输出。
12脚:ZSP,零速检测输出。
13脚:GND,信号地。
14脚:SPR/TRQR/SPL,速度指令输入/转矩指令输入/速度限制输入。
15脚:GND,信号地。
16脚:P-ATL/TRQR,正向转矩限制输入/转矩指令输入。
17脚:GND,信号地。
18脚:N-ATL,反向转矩限制输入。
14——18脚(输入电路参考3--31)19脚:CZ,Z相输出(开路集电极)。
20脚:无。
21脚:OA+,A相输出。
22脚:OA-,A相输出。
23脚:OZ+,Z相输出。
松下伺服系统基本接线及常见问题解决方法
松下伺服系统基本接线及常见问题解决方法一、基本接线主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤1.JOG试机功能仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;按住‘’键直至显示‘SrV-on’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
MBDDT2210003电机,MBDDT2210003电机常见问题解决方法:1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?咨询温小姐;张先生182==019==88=309 或150 -266-48-109 技术产品资料和选型请加q; 8788--56087,价格优惠,质量保证,货源充足。
松下A伺服驱动器IF口接脚详解
松下A5伺服驱动器I/F口X4接脚详解1脚:OPC1,指令脉冲输入2,脉冲信号2脚:OPC2,指令符号输入2,控制方向3脚:PULS1,指令脉冲输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻4脚:PULS2,指令脉冲输入2,plc脉冲输出端子;5脚:SIGN1,指令符号输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻6脚:SIGN2,指令符号输入2,plc继电器输出端子,1——6脚该段输入脉冲在500kpps以下使用;为光电耦合器输入;对应行驱动线/开路集电极;容许输入最高频率在长线驱动器输入时为500kpps,集电极开路输入时为200kpps;设置参数为:PR0.06指令脉冲极性设定/PR0.07指令脉冲输入模式设定/PR0.05指令脉冲输入选择最大输入电压DC24V,额定电流10mA;输入电路参考3--307脚:COM+,控制信号电源+.电源的最低电压为11.4V以上;8脚:NOT,反向驱动禁止输入;9脚:POT,正向驱动禁止输入;8——9脚参数设置为:PR5.04驱动禁止输入设定默认值1/PR5.05驱动禁止时顺序设置默认值0,接脚描述参考3--38与错误码38有关联;10脚:BRKOFF-,外部制动器解除输出;11脚:BRKOFF+,外部制动器解除输出;12脚:ZSP,零速检测输出;13脚:GND,信号地;14脚:SPR/TRQR/SPL,速度指令输入/转矩指令输入/速度限制输入;15脚:GND,信号地;16脚:P-ATL/TRQR,正向转矩限制输入/转矩指令输入;17脚:GND,信号地;18脚:N-ATL,反向转矩限制输入;14——18脚输入电路参考3--3119脚:CZ,Z相输出开路集电极;20脚:无;;21脚:OA+,A相输出;22脚:OA-,A相输出;23脚:OZ+,Z相输出;24脚:OZ-,Z相输出;25脚:GND,信号地;控制输入出厂设定见3—37,4-32,4-3326脚:VS-SEL1; ZEROSPD; SI3输入,位置控制时为减震控制切换输入VS-SEL1,设置参数为PR2.13减振滤波器切换选择;速度、转矩控制时为零速箝位输入ZEROSPD,设置参数为PR3.15零速箝位机能选择默认值0,无效/PR3.16零速箝位等级;27脚:GAIN;SI4输入,增益切换输入GAIN,位置控制时PR1.15速度控制时PR1.20转矩控制时PR1.2428脚:DIV1 ;INTSPD3;SI5输入,位置控制时:指令分倍频切换输入1DIV1,参数设置见3-39及PR0.09/0.10PR5.00---5.02;速度控制时:内部指令速度选择3输入INTSPD3,PR3.00/PR3.0629脚:SRV-ON;SI6输入,伺服ON输入SRV-ON,30脚:CL;INTSPD2;SI7输入,位置控制时:偏差计数器清零输入CL,参数设置见3-38,PR5.17速度控制时:内部指令速度选择2输入INTSPD2,PR3.00/PR3.0531脚:A-CLR;SI8输入,警报清除输入A-CLR,参数设置见2-638,6-3,7-25;PR5.16警报清除输入设定,识别时间默认120ms;即接通时间要超过120ms;当过载保护动作时,可在发生警报约10s后通过报警解除信号清除;32脚:C-MODE;SI9输入,控制模式切换输入C-MODE,参数见PR0.0133脚:INH;INTSPD1;SI10输入,位置控制时:指令脉冲禁止输入INH,与错误码24有关联;参数见PR5.18速度控制时:内部指令速度选择1输入INTSPD1,PR3.00/PR3.0434脚:S-RDY-,伺服准备就绪输出;35脚:S-RDY+,伺服准备就绪输出;36脚:ALM-,伺服警报输出;37脚:ALM+,伺服警报输出;36——37脚,在报警状态时停止输出;38脚:INP-,AT-SPEED-,位置控制时:定位完成输出INP-;速度转矩控制时:速度到达输出AT-SPEED-;39脚:INP+,AT-SPEED+,位置控制时:定位完成输出INP+;速度转矩控制时:速度到达输出AT-SPEED+;40脚:TCL,转矩限制中输出;接口描述参考3—45;参数设置为PR0.13第一转矩限制默认值500/PR5.21转矩限制选择默认值1,使用第一转矩限制/PR5.22第二转矩限制默认值50041脚:COM-,控制电源负极-42脚:IM,模拟监视器输出;43脚:SP,速度监视输出;44脚:PULSH1,指令脉冲输入145脚:PULSH2,指令脉冲输入146脚:SIGNH1,指令符号输入147脚:SIGNH2,指令符号输入1位置控制模式有效;44——47脚参数设定PR0.06指令脉冲极性设定/PR0.07指令脉冲输入模式设定/PR0.05指令脉冲输入选择,容许输入最高频率为4Mpps;输入电路参考3--3148脚:OB+,B相输出;49脚:OB-,B相输出;50脚:FG,框体接地;驱动器内部与地线端子连接;。
三菱PLC-FX1N松下A5伺服接线和程序

PLC型号:FX1N-40MT-001(集电极型的PLC)
接线图参考
其中
❺响应时间:
可编程控制器从光电摘合盤驱动(或切断)到晶体管ON(或OFF)所用时间为0・2ms以下(Y0. YI是
Y000. Y001是离速响应输出-
DC5V-24V. lOTOOmA时.-100kHz以下.
谄参考下述内容.
滋冲褊出族特万冋
O开路漏电流:
0.1mA以下.
进行调试的过程需要更改
PY0.06
1镂性遽定丿iSSffi
PTO .07
令休冲、1桶人篁式丿 识定值
苗号名祎
匹方向tfi令
负疔尙15令
0
0a
2
3”财位差Z明竦冲 (沁B相)
PLLS
SIGN
cl 11
_FTELJ-L
I • i »
tl 11
映ittAie快9<r
ti «i
^R=run=
$ 4
j=tn_n_
12 12
3
*1冲序列•+
PU.S
SIGN
—W^-O-
■b
T-i V U
"57
:6t&
ta:e
■栢令IW冲瀛入形态
-PULS.516为切冲列漠入胆筋的出.漁站阅入咆路]图.
•负方向腿冲序列十正方向躲冲序列■林冲用列十苻舄的悄况下.上升Jft时述取雌冲序列••2相脚冲时,在各上升沿时读取肺冲甲•
下面是测试程序:
M8000
卄
帯ON
Ml
卄
回滋it点
{DMOV D8140D10
YOOO的肘读取岁前 冲决谢佰
{set
Minas A系列全闭环伺服驱动器技术参考手册

1.位置控制 2.模拟量速度控制 3.转矩控制 4.位置-速度控制 5.位置-转矩控制
控制方式
6.速度-转矩控制 7.半闭环控制 8.全闭环控制 9.混合式控制
10.速度-外部反馈装置控制 11.速度-半闭环控制
1.伺服-ON 2.报警清除 3.增益切换 4.比例操作选择 5.指令分倍频选择
控制输入
PR02 值 6 7 8
9
10
控制、闭环方式 位置半闭环控制 位置全闭环控制
位置半闭环/全闭环切换控制
1
速度半闭环控制
2
位置全闭环控制
1
速度半闭环控制
2
位置半闭环控制
速度环采样
位置环采样
电机编码器
电机编码器
外部反馈装置
电机编码器
电机编码器或外部 反馈装置
电机编码器
――――
外部反馈装置
电机编码器
――――
部 功
指令脉冲分/倍频
能 编码器每转输出脉冲数 1~16384P/r
1 ~ 10000 × 20~17
的计算结果
1 ~ 10000
保护功能
硬件 过电压、欠电压、过速度、过载、过电流、编码器异常 软件 位置偏差过大,指令脉冲分倍频,EEPROM 异常
故障历史记忆功能 可记忆包括当前在内的 14 个历史故障
6.控制方式选择 7.内部速度指令选择 8.CW 驱动禁止 W 驱动禁止
10.零速钳位 11.平滑功能输入 12.光栅尺故障输入
输 入
速度指令输入 由参数设定范围和极性(出厂值:6V/额定转速 )
信 号
模拟指令 转矩指令输入
与速度指令输入共用,转矩控制、位置-转矩控制时有效(出厂设定 3V/ 额定转矩) 与 CCW 转矩限制输入共用,速度-转矩控制时有效(出厂设定 3V/额定转矩)
松下伺服A系列编码器接线定义精选版

松下伺服A系列编码器
接线定义
Document serial number【KKGB-LBS98YT-BS8CB-BSUT-BST108】
目前国内市场上松下A6系列伺服电机已成为主流,相对A52系列伺服电机,松下A6系列伺服在性能上有所提升,并且搭载了A5II系列中广受好评的2自由度控制方式,可简单进行设定及调整;新开发输出范围50W~5.0KW多种类电机,采用23bit绝对式编码器,实现高分辨率,可进行更高精度的定位、机械驱动。
A6系列伺服电机最大的特点就是电机采用23位绝对式编码器,用户可根据自身需要自行选择用作增量式编码器或绝对式编码器,两者为同一款电机,用作绝对式编码器时加一个电池及电池盒即可,相对A52系列价格及货期均有明显优势。
现A6系列编码器连接图如下,X6接口:
1、将23bit绝对式编码器作为绝对式系统使用时:
2、将23bit绝对式编码器作为增量式系统使用时:。
松下交流伺服接线和常见故障分析报告

一、根本接线〔某某太鑫电子科技某某提供〕主电源输入采用~220V,从L1、L3接入〔实际使用应参照操作手册〕;控制电源输入r、t也可直接接~220V电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤〔某某太鑫电子科技某某提供〕1.JOG试机功能〔某某太鑫电子科技某某提供〕仅按根本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’按住‘<’键直至显示‘SrV-on’按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键完毕。
2.内部速度控制方式〔某某太鑫电子科技某某提供〕+〔7脚〕接+12~24VDC,-〔41脚〕接该直流电源地;SRV-ON〔29脚〕接-参数No.53、No.05设置为1:〔注此类参数修改后应写入EEPROM,并重新上电〕调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式〔某某太鑫电子科技某某提供〕+〔7脚〕接+12~24VDC,-〔41脚〕接该直流电源地;SRV-ON〔29脚〕接-PLUS1〔3脚〕、SIGN1〔5脚〕接脉冲源的电源正极〔+5V〕;PLUS2〔4脚〕接脉冲信号,SIGN〔6脚〕接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS〔4脚〕送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B(A4对应48,4B;A5对应009,010),可改变电机每转所需的脉冲数〔即电子齿轮〕。
常见问题解决方法: 〔某某太鑫电子科技某某提供〕1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
松下A5伺服驱动器IF口接脚详解

松下A5伺服驱动器I/F 口(X4 )接脚详解1脚:0PC1,指令脉冲输入2,脉冲信号2脚:0PC2,指令符号输入2,控制方向3脚:PULS1,指令脉冲输入2, +12V需串接1K Q , 1/2W的电阻,+24V需串接21K Q , 1/2W 的电阻4 脚:PULS2 ,指令脉冲输入2,plc 脉冲输出端子。
5脚:SIGN1,指令符号输入2, +12V需串接1KQ, 1/2W的电阻,+24V需串接21 K Q , 1/2W 的电阻6 脚:SIGN2 ,指令符号输入2,plc 继电器输出端子,1——6 脚该段输入脉冲在500kpps 以下使用。
为光电耦合器输入。
对应行驱动线/开路集电极。
容许输入最高频率在长线驱动器输入时为500kpps,集电极开路输入时为200kpps。
设置参数为:PR0.06指令脉冲极性设定/PR0.07指令脉冲输入模式设定/PR0.05指令脉冲输入选择最大输入电压DC24V,额定电流10mA。
(输入电路参考3--30)7脚:COM+,控制信号电源(+)•电源的最低电压为11.4V以上。
8 脚:NOT ,反向驱动禁止输入。
9脚:POT,正向驱动禁止输入。
8―― 9脚参数设置为:PR5.04驱动禁止输入设定(默认值1)/PR5.05驱动禁止时顺序设置(默认值0), (接脚描述参考3--38)与错误码38 有关联。
10脚:BRKOFF ―,外部制动器解除输出。
11 脚:BRKOFF+ ,外部制动器解除输出。
12脚:ZSP,零速检测输出。
13脚:GND,信号地。
14脚:SPR/TRQR/SPL ,速度指令输入/转矩指令输入/速度限制输入。
15脚:GND,信号地。
16脚:P-ATL/TRQR , 正向转矩限制输入/转矩指令输入。
17脚:GND,信号地。
18脚:N-ATL,反向转矩限制输入。
14―― 18脚(输入电路参考3--31 )19脚:CZ , Z相输出(开路集电极)。
20 脚:无。
松下A5伺服驱动器IF口接脚详解

1脚:OPC1,指令脉冲输入2,脉冲信号2脚:OPC2,指令符号输入2,控制方向3脚:PULS1,指令脉冲输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻4脚:PULS2,指令脉冲输入2,plc脉冲输出端子。
5脚:SIGN1,指令符号输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻6脚:SIGN2,指令符号输入2,plc继电器输出端子,1——6脚该段输入脉冲在500kpps以下使用。
为光电耦合器输入。
对应行驱动线/开路集电极。
容许输入最高频率在长线驱动器输入时为500kpps,集电极开路输入时为200kpps。
设置参数为:指令脉冲极性设定/指令脉冲输入模式设定/指令脉冲输入选择最大输入电压DC24V,额定电流10mA。
(输入电路参考3--30)7脚:COM+,控制信号电源(+).电源的最低电压为以上。
8脚:NOT,反向驱动禁止输入。
9脚:POT,正向驱动禁止输入。
8——9脚参数设置为:驱动禁止输入设定(默认值1)/驱动禁止时顺序设置(默认值0),(接脚描述参考3--38)与错误码38有关联。
10脚:BRKOFF-,外部制动器解除输出。
11脚:BRKOFF+,外部制动器解除输出。
12脚:ZSP,零速检测输出。
13脚:GND,信号地。
14脚:SPR/TRQR/SPL,速度指令输入/转矩指令输入/速度限制输入。
15脚:GND,信号地。
16脚:P-ATL/TRQR,正向转矩限制输入/转矩指令输入。
17脚:GND,信号地。
18脚:N-ATL,反向转矩限制输入。
14——18脚(输入电路参考3--31)19脚:CZ,Z相输出(开路集电极)。
20脚:无。
21脚:OA+,A相输出。
22脚:OA-,A相输出。
23脚:OZ+,Z相输出。
24脚:OZ-,Z相输出。
25脚:GND,信号地。
控制输入出厂设定见3—37,4-32,4-3326脚:VS-SEL1; ZEROSPD; SI3输入,位置控制时为减震控制切换输入(VS-SEL1),设置参数为减振滤波器切换选择。
松下伺服器接线总结..

松下伺服电机接线总结伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1H运动控制卡型号:PCI-12401、主电路工作原理:按下空气开关MCCB后,控制电路L1C、L2C先得电。
此时ALM+引脚有输出,ALM回路控制的回路接通,ALM回路的继电器控制的开关ALM 闭合。
软件开关通过程序控制主电路的通断,正常运行情况下一直运行。
此时只要按下开始按钮ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈MC得电后,使电磁接触器控制的开关MC闭合,此时即使开始按钮ON断开,由于电路的自锁作用,主电路仍然接通。
2、脉冲发送电路接线根据:运动控制卡PCI-1240给出的控制卡功能模块图如下图所示由图可知,运动控制卡输出脉冲的方式为长线驱动方式。
松电机下伺服使用手册中P3-35(P151)中提到长线驱动接线端子说明如下图手册P3-18(P134)给出的长线驱动接线方法如下图3、编码器反馈脉冲接收电路接线原理:关于利用伺服驱动器输出的ABZ相脉冲计算伺服电机的旋转角度(参考网址:/Details/200810/2008103112034200001-1.shtml)推荐做法:先将OA、OB脉冲四倍频(类似于DSP的QEP计数模块),具体实现的时候只需要记住OA、OB的每个脉冲跳变即可实现四倍频,同时要辩相,一般我们定义OA超前OB为电机旋转正方向,此时脉冲累加,否则为负方向,脉冲累减。
知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈2500个,由于我们四倍频了,故实际到我们这里就应该是10000个没圈,根据这个脉冲你就可以知道电机的相对位置。
根据OC信号,你可以知道电机的绝对位置,一般定义OC出现的时刻就是电机转子的零位,因此每次检测到OC出现,就应该认为绝对位置出现,这样可以清除累积误差。
根据收到的脉冲数,采用M法测速也可以计算出实际电机的转速。
接线根据:伺服驱动器说明书P3-32(P148)给出的接线说明由此说明可知,必须使用长线接收器接收伺服驱动器编码器反馈的脉冲,且需加入终端电阻。
松下伺服驱动器说明书

PanasonicMinas A4系列AC伺服驱动器说明书Minas A4系列驱动器技术资料选编i目录1.规格型号说明 1 1-1.伺服驱动器型号说明 1 1-2.驱动器与电机的组合 2 1-3.驱动器与电机的尺寸 3 1-4.技术规格 52.外形与接插件9 2-1.接插件外形与清单9 2-2.电源插头X1、X2和编码器插头X611 2-3.控制信号接口X512 2-3-1.位置控制模式控制信号接线图12 2-3-2.速度控制模式控制信号接线图13 2-3-3.控制信号接线详解143.接线图26 3-1.电缆规格与最大长度26 3-2.I/O控制信号插头,编码器插头和外部反馈装置插头26 3-3.接线指示26 3-3-1.连接到电源接线端子的电缆26 3-3-2.连接到控制信号接口X529 3-3-3.连接到编码器信号接口X6344.参数36 4-1.参数概略36 4-2.参数详解39 4-3.电子齿轮功能565.时序图57 6.保护功能60 7.操作说明658.增益调整72 8-1.调整方法与框图72 8-2.实时自动增益调整73 8-3.常规自动增益调整76 8-4.适配增益调整78 8-5.自动调整功能的禁止80 8-6.增益自动设置功能81 8-6.手动调整增益829.控制框图93-cawin—abridged—jul04-Minas A4系列驱动器技术资料选编-1 -1.型号规格说明1-1.伺服驱动器型号说明1-1-1.预期使用期限在如下运行条件下,伺服驱动器预期可以使用28,000小时。
输入电源单相100VAC,50/60Hz;三相200VAC,50/60Hz环境温度 55℃输出转矩按额定转矩输出运行条件电机转速按额定转速输出伺服驱动器的可用期限与其运行工况密切相关。
1-1-2.驱动器型号说明Minas A4系列驱动器技术资料选编 -2 -1-2.驱动器与电机的组合伺服驱动器适配电机 型号 类型输入电源 型号 电压额定功率额定转速编码器规格 MSMD5AZP1*5线制,2500p/r MADDT1105 A 型 单相100V MSMD5AZS1*50W7线制,17位 MSMD011P1*5线制,2500p/r MADDT1107A 型单相100VMSMD011S1*100V100W 7线制,17位 MSMD5AZP1*5线制,2500p/r MSMD5AZS1*50W 7线制,17位 MSMD012P1*5线制,2500p/r MADDT1205A 型单相200VMSMD012S1*100W7线制,17位 MSMD022P1*5线制,2500p/r MSMD022S1*200W3000rpm7线制,17位MAMA012P1*5线制,2500p/rMADDT1207A 型单相200VMAMA012S1*200V100W 5000rpm7线制,17位 MSMD021P1*5线制,2500p/r MBDDT2110B 型单相100VMSMD021S1*100V 200W7线制,17位 MSMD042P1*5线制,2500p/r MSMD042S1*400W3000rpm7线制,17位MAMA022P1*5线制,2500p/rMBDDT2210B 型单相200VMAMA022S1*200V 200W 5000rpm7线制,17位 MSMD041P1*5线制,2500p/r MCDDT3120C 型单相100VMSMD041S1*100V 400W7线制,17位 MSMD082P1*5线制,2500p/r MSMD082S1*750W3000rpm7线制,17位MAMD042P1*5线制,2500p/rMCDDT3520C 型单相/三相 200VMAMD042S1*200V 400W 5000rpm7线制,17位Minas A4系列驱动器技术资料选编-3 -1-3.驱动器与电机的安装尺寸1-3-1.驱动器的安装尺寸A型驱动器B型驱动器Minas A4系列驱动器技术资料选编-4 -C型驱动器1-3-2.电机的安装尺寸请参考电机样本,此从略。
松下全数字式交流伺服接线和常见故障分析
{松下全数字式交流伺服接线和常见故障分析}一、基本接线(上海太鑫电子科技有限公司提供)主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤(上海太鑫电子科技有限公司提供)1.JOG试机功能(上海太鑫电子科技有限公司提供)仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’按住‘<’键直至显示‘SrV-on’按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式(上海太鑫电子科技有限公司提供)COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM- 参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式(上海太鑫电子科技有限公司提供)COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM- PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B(A4对应48,4B;A5对应009,010),可改变电机每转所需的脉冲数(即电子齿轮)。
常见问题解决方法: (上海太鑫电子科技有限公司提供)1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
松下a1伺服说明书

松下a1伺服说明书篇一:Panasonic伺服参数设定说明Panasonic(MINAS A系列)伺服參數設定說明:备注: 1、首先设置驱动器的电子齿轮比和需要马达转一圈回授的脉冲数计算方法如下:MSMA0421A通常新代控制器所设精度单位 1um/Pules (可在系统参数17中设所需精度单位)通常新代控制器所设的倍频数是4 倍(可在系统参数81~100中所设轴卡的倍频)计算公式:F= f ×/ Pr 4B = 10000或注: F —电机转一圈所需的内部指令脉冲数(编码器的分辨率)f —电机转一圈所需指令脉冲数马达转一圈回授的脉冲数= 负载转一圈移动量脉冲数÷控制器内部所设的倍频 4****** ex: ******当螺杆的节距是10mm,马达选用A 型编码器分辨率,采用直传连轴器那齿轮比计算如下:负载转一圈移动量脉冲数 = 10mm÷1um/Pules =104 Pules M / N = 1 / 1F = f × { Pr 46 × 2Pr 4A ) ÷ Pr 4B 把 Pr4A = 0 1、Pr 46 = 100002、Pr 4B = 100002、设定上表中的驱动器参数,值为后面的设定值;Pr 4A、Pr 46、Pr 4B为上面公式根据实际情况计算出来的值;Pr 10、Pr 11、Pr 12先不修改数值,为出厂值;3、调整机台的刚性,先进行X、Y、Z 轴的来回运动,通过自动整定调谐驱动器参数值,按加1数值增大;通常调节到机台出现震动或有声音后,降回原一级。
注意一点:调完后,需把X、Y、Z的位置增益Pr 10设成一样大;注意:齿轮比设错,编码器会无回授,同时控制器发遗失位置命令、严重追随误差警报。
使用面板设定参数的方式:1、接通驱动器电源;2、按set键按钮;3、按住MODE键按钮,到显示为:“PA_ 00”;4、按上↑、或下↓键按钮,来选择需要设定的数号,如选择10号参数,显示为:“PA_ 10”;5、按set键按钮,进入对应参数值,显示为:“ 50”;6、用左←键、上↑键、下↓键,来修改设定数值;7、修改完后,按set键按钮,确认退出;当修改完所有要修改的参数后,要执行选择EEPROM模式写入,8、按MODE键按钮,到显示为:“EE_ SET”; 9、按set键按钮,到显示为:“EEP -”; 10、按住上↑键按钮约(持续3秒钟),显示转换如下:“EEP -”→“EEP - -”→“- - - - - -”→“START” [→“FINISH”[→“Reset” [→“ERROR”“FINISH”与“Reset”写入完成;“ERROR”写入出错,须重新设定参数,后再写入;显示“Reset”需要关电源,重开电源后,设定参数值生效;常规自动增益调节:1、选择常规自动增益调节模式,初始显示“r0”;2、按SET键按钮一次,按MODE模式键切换,按钮三次,到显示为“At_no 1”;3、按上↑、下↓键来选择机器的刚性,刚性越高越好,但前提条件是机台不抖动;4、按SET键按钮,进入监视器 / 执行模式;显示为:“Atu -”;5、在监视器 / 执行模式上运作:按住上↑键按钮约3秒,直到出现显示“start”,电机开始运转,大约15秒内,电机重复5个周期,包括两圈的正转和反转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
松下A伺服驱动器I F
口接脚详解
IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】
松下A5伺服驱动器I/F口(X4)接脚详解
1脚:OPC1,指令脉冲输入2,脉冲信号
2脚:OPC2,指令符号输入2,控制方向
3脚:PULS1,指令脉冲输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻
4脚:PULS2,指令脉冲输入2,plc脉冲输出端子。
5脚:SIGN1,指令符号输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻
6脚:SIGN2,指令符号输入2,plc继电器输出端子,
1——6脚该段输入脉冲在500kpps以下使用。
为光电耦合器输入。
对应行驱动线/开路集电极。
容许输入最高频率在长线驱动器输入时为500kpps,集电极开路输入时为
200kpps。
设置参数为:指令脉冲极性设定/指令脉冲输入模式设定/指令脉冲输入选择
最大输入电压DC24V,额定电流10mA。
(输入电路参考3--30)
7脚:COM+,控制信号电源(+).电源的最低电压为以上。
8脚:NOT,反向驱动禁止输入。
9脚:POT,正向驱动禁止输入。
8——9脚参数设置为:驱动禁止输入设定(默认值1)/驱动禁止时顺序设置(默认值0),(接脚描述参考3--38)与错误码38有关联。
10脚:BRKOFF-,外部制动器解除输出。
11脚:BRKOFF+,外部制动器解除输出。
12脚:ZSP,零速检测输出。
13脚:GND,信号地。
14脚:SPR/TRQR/SPL,速度指令输入/转矩指令输入/速度限制输入。
15脚:GND,信号地。
16脚:P-ATL/TRQR,正向转矩限制输入/转矩指令输入。
17脚:GND,信号地。
18脚:N-ATL,反向转矩限制输入。
14——18脚(输入电路参考3--31)
19脚:CZ,Z相输出(开路集电极)。
20脚:无。
21脚:OA+,A相输出。
22脚:OA-,A相输出。
23脚:OZ+,Z相输出。
24脚:OZ-,Z相输出。
25脚:GND,信号地。
控制输入出厂设定见3—37,4-32,4-33
26脚:VS-SEL1;ZEROSPD;SI3输入,
位置控制时为减震控制切换输入(VS-SEL1),设置参数为减振滤波器切换选择。
速度、转矩控制时为零速箝位输入(ZEROSPD),设置参数为零速箝位机能选择(默认值0,无效)/零速箝位等级。
27脚:GAIN;SI4输入,
增益切换输入(GAIN),
位置控制时
速度控制时
转矩控制时
28脚:DIV1;INTSPD3;SI5输入,
位置控制时:指令分倍频切换输入1(DIV1),参数设置见3-39及。
速度控制时:内部指令速度选择3输入(INTSPD3),
29脚:SRV-ON;SI6输入,
伺服ON输入(SRV-ON),
30脚:CL;INTSPD2;SI7输入,
位置控制时:偏差计数器清零输入(CL),参数设置见3-38,
速度控制时:内部指令速度选择2输入(INTSPD2),
31脚:A-CLR;SI8输入,
警报清除输入(A-CLR),参数设置见2-63(8),6-3,7-25。
警报清除输入设定,识别时间默认120ms。
即接通时间要超过120ms。
当过载保护动作时,可在发生警报约10s后通过报警解除信号清除。
32脚:C-MODE;SI9输入,
控制模式切换输入(C-MODE),参数见
33脚:INH;INTSPD1;SI10输入,
位置控制时:指令脉冲禁止输入(INH),与错误码24有关联。
参数见
速度控制时:内部指令速度选择1输入(INTSPD1),
34脚:S-RDY-,伺服准备就绪输出。
35脚:S-RDY+,伺服准备就绪输出。
36脚:ALM-,伺服警报输出。
37脚:ALM+,伺服警报输出。
36——37脚,在报警状态时停止输出。
38脚:INP-,AT-SPEED-,
位置控制时:定位完成输出(INP-)。
速度转矩控制时:速度到达输出(AT-SPEED-)。
39脚:INP+,AT-SPEED+,
位置控制时:定位完成输出(INP+)。
速度转矩控制时:速度到达输出(AT-SPEED+)。
40脚:TCL,转矩限制中输出。
接口描述参考3—45;参数设置为第一转矩限制(默认值500)/转矩限制选择(默认值1,使用第一转矩限制)/第二转矩限制(默认值500)
41脚:COM-,控制电源负极(-)
42脚:IM,模拟监视器输出。
43脚:SP,速度监视输出。
44脚:PULSH1,指令脉冲输入1
45脚:PULSH2,指令脉冲输入1
46脚:SIGNH1,指令符号输入1
47脚:SIGNH2,指令符号输入1
位置控制模式有效。
44——47脚参数设定指令脉冲极性设定/指令脉冲输入模式设定/指令脉冲输入选择,容许输入最高频率为4Mpps。
(输入电路参考3--31)
48脚:OB+,B相输出。
49脚:OB-,B相输出。
50脚:FG,框体接地。
驱动器内部与地线端子连接。