履带式行走机构设计分析和研究
毕业设计(论文)开题报告-履带式行走底盘设计

湖南农业大学全日制普通本科生毕业论文(设计)开题报告学生姓名学号年级专业及班级2009级汽车服务工程(1)班指导教师及职称学院工学院20 年月日毕业论文(设计)履带式行走底盘设计题目文献综述(选题研究意义、国内外研究现状、主要参考文献等,不少于1000字)1.履带式行走底盘设计研究意义履带式底盘的结构特点和性能决定了它在农田机耕作业中具有明显的优势。
履带式底盘的拖拉机不会对翻耕过的土壤造成多次反复的碾压,而轮式底盘在整地和耙地作业时轮胎在翻耕过的土壤上反复碾压,造成对土壤的多次压实,不利于播种后种子的生长发育。
因此,研究履带底盘的性能具有极其重要的意义。
下面我们以履带式拖拉机为例来加以解释说明。
履带式拖拉机的接地比压相对较低,从 51.8kW 到 118.4 kW 的各型拖拉机的接地比压为 30~50kPa,而同级别的轮式拖拉机接地比压要大的多。
以 96.2 kW 拖拉机为以例: 东方红 1302 履带机接地比压(装推土铲)为 47.7kPa;东方红1304 轮式机的接地比压约为104 kPa,相当于履带拖拉机的二倍多计。
无论是整地耙地作业还是播种作业履带式拖拉机比轮式拖拉机都占有绝对优势。
几乎所有山区种植粮油作物的农户毫无例外的选择履带式拖拉机。
2.履带式行走底盘设计的国内外研究状况底盘的作用是支承、安装发动机及其各部件、总成,形成车辆的整体造型,并动力,使整车产生运动,保证正常行驶。
在国外,履带式行走底盘研发较早。
1986 年 W. C. Evans 和 D. S. Gove 公布了在硬地面和已耕地上,1种橡胶履带与1种四轮驱动拖拉机牵引性能的实验结果。
在相同的底盘结构情况下,橡胶履带牵引效率与动态牵引比高,在已耕地和硬地面上其最大牵引效率是 85%~90%,四轮驱动拖拉机是70%~85%。
此后又有许多橡胶履带拖拉机与四轮驱动拖拉机性能试验的研究。
国外生产的履带拖拉机在技术水平、生产能力等性能方面具备较强的竞争能力。
悬臂式掘进机履带行走机构主要参数的确定
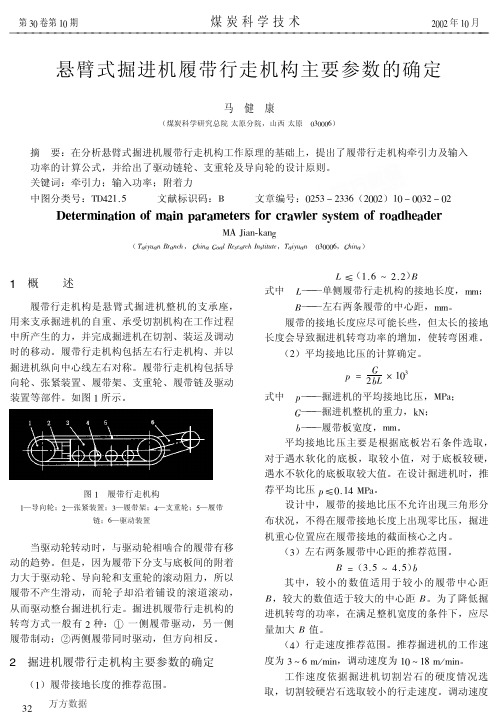
当驱动轮转动时,与驱动轮相啮合的履带有移 动的趋势。但是,因为履带下分支与底板间的附着 力大于驱动轮、导向轮和支重轮的滚动阻力,所以 履带不产生滑动,而轮子却沿着铺设的滚道滚动, 从而驱动整台掘进机行走。掘进机履带行走机构的 转弯方式一般有 ’ 种: ! 一侧履带驱动,另一侧 履带制动;"两侧履带同时驱动,但方向相反。
应尽可能大些,以降低掘进机辅助工作时间,但速 度太高,会导致驱动功率的增大。 (!)张紧装置行程的推荐范围。张紧装置的行 程应大于履带节距的一半,以便在履带因磨损而伸 长时,可拆去块而继续使用。张紧装置的行程一 般为 "#$! % &#’! 个履带节距。 (()单侧履带行走机构牵引力的计算确定。履 带行走机构的最小牵引力应满足掘进机在最大设计 坡度上作业、爬坡和在水平路面上转弯等工况的要 求,最大牵引力应小于在水平路面履带的附着力。 一般情况下,履带行走机构转弯不与掘进机作业、 爬坡同时进行,而掘进机在水平地面转弯时,单侧 履带的牵引力为最大,故单侧履带行走机构的牵引 力的计算以此为依据。 %& & ( ) ) ’ !& " #& $ ! )’ &’ #& " %& * 式中 — —单侧履带行走机构的牵引力, *+; !&— — —单侧履带对地面的滚动阻力, *+; #&— — —履带与地面之间滚动阻力因数,"#", *— % &#"; — —履带 与 地 面 之 间 的 转 向 阻 力 因 数, !— "#, % "#&"; — —掘进机重心与履带行走机构接地形心 )— 的纵向偏心距离,--; — —单侧履带行走机构承受的掘进机的重 %&— 力, *+。 ($)单侧履带行走机构输入功率的计算确定。 + " !& , -"& "’ 式中 — —单侧履带行走机构的输入功率, *.; +— — —履 带 行 走 机 构 工 作 时 的 行 走 速 度, ,— - / 0; — —履 带 链 的 传 动 效 率。有 支 重 轮 时 取 "& — "#,1 % "#1’, 无 支 重 轮 时 取 "#$& % "#$); — —驱动装置减速器的传动效率, 2。 "’ — (,)履带对地面附着力校核计算。单侧履带行 走机构的牵引力心须大于或等于各阻力之和,但应 小于或等于单侧履带与地面之间的附着力。 !& 3 % &#,附着系数值 # 根据表 & 选取。 (1)张紧装置预张力的计算确定。 !" " ./ ’ - ) 0
悬臂式掘进机履带行走机构的设计
ABS TRA CT:By u s i n g t h e we a t h e r c i r c u l a t i o n s i t ua t i o n a n d v a r i o u s p hy s i c a l ie f l d s’ c h a r a c t e r i s t i c s , t h i s p a pe r a n a l y z e s a
气系统等部分组成 ,掘进机 由截割机构 的电机经过二级行 星减 速机驱动截割头进行截煤作业 ,截割臂 由液压系统 的升降油缸
和 回转油缸控制 ,进给作业 由行走机构的液压马达驱动履带来 实现 , 机器作业 时的支撑 由装 载机构 的铲板 和后 支撑 完成 , 截割
有西南 风急流存 在 ; 三 是从强降水 时段的涡度场 、 散度场 、 垂 直
速度场等物理量场看出 , 我市 西北 部为 辐合 区 , 这些参数 和降水
西部 为一 2 0 x 1 0 h P a / s , 也说 明西部为上升运动。
( 4 ) 从红外云图看出 , 7月 2 1日 8 时 1 5分 , 我市范 围有很强
量大小分布落 区吻合较好。
对于天气预报而言 , 日本降水传真 图和德 国数值 预报 场对
山西科技 文章编号 : 1 0 0 4 — 6 4 2 9 ( 2 0 1 3 ) 0 6 — 0 0 61 — 0 4
履带式掘进机行走机构英文参考文献

履带式掘进机行走机构英文参考文献参考文献:1. Zhang, Y., Liu, C., Hu, X., Li, J., & Yan, X. (2017). Research on the bearing capacity of walking chassis based on multibody dynamics simulation. Journal of Vibroengineering, 19(3), 2116-2134.这篇研究基于多体动力学模拟,探讨了履带式掘进机的行走机构的承载能力。
通过建立多体动力学模型,对行走机构的受力分析和承载能力进行了研究,为行走机构设计和优化提供了理论依据。
2. Li, H., Chen, Y., Bai, L., & Zhang, H. (2019). Crawler walking mechanism kinematics and dynamics analysis of coal mine roof bolting rig. Journal of Mining and Safety Engineering, 36(1), 96-102.这篇论文对煤矿顶板支护钻孔机的履带行走机构进行了运动学和动力学分析。
通过建立机构的运动学和动力学模型,研究了履带行走机构的运动规律和受力情况,为机构的设计和控制提供了基础。
3. Wu, X., Dong, F., & Li, C. (2013). Analysis of the steering mechanism of the crawler walking chassis. Mining & Processing Equipment, 41(1), 75-78.本文对履带式掘进机行走机构的转向机构进行了分析。
通过研究转向机构的结构和工作原理,分析了其转向机构的动作规律和影响因素,为转向机构的设计和控制提供了参考。
履带式行走机构设计分析

低重心 。在设计时 ,应注意使 导向轮前 履 带 式 行 走 机 梅 设 计 分 析 调整 范 围 超 过 履 带 节 距 的一 半 , 当 、后移 动的 因 履 带
磨 损 节 距 变 长 时 ,可 取 下 1节 履 带 板 ,仍 能 保 持 履 带 的 张 紧度 。
履 带板 的宽度 取决于工作 条件所要求 的平均接地 比
压 ,宽度越大 , 接地 比压越小 。 一般参照计算公式为 :b =
(. ~ . )× 29× 4 09 11 0 0 0 √G,式中,b为履带宽度 ;G 为
开 发与研究
摘 要 :履带式i 走机构是大型机械整机 的 J :
12 驱 动 轮 . 驱 动 轮 的 齿数 一 般 选 为 奇 数 , 目的 是 使 驱
支承件 ,用 来支承整机的 节 ,承受机构在作业 过程 中产生作 用力 , 完成 机} 进 、后退 、转 J
动轮各齿轮流与节销 啮合 ,增加使用寿命。
冲弹簧预紧力参照计算式为:P (. 0 )G,式中,P O = . 8 v
为 弹 簧 预 紧 力 ; G 为机 体 自重 。 14 支 重轮 .
ห้องสมุดไป่ตู้
支重轮的个数和布置应有利于使履带接地压力分布均 匀。 因此, 在履带作业机械上均采用 直径较 小的多个支重 轮 ,支重轮的个数随车辆功率 ( 机重)的增加而增多 。 但
及转 向功 能 。
翟
机
布置在前还是在后与传动系的布置有关。驱动
轮 中 心 高 度 应 有 利 于 降低 重 心 ( 车 身 )高 度 或
厂
和 增加履带接地长度 ,改善附着 性能 。因此驱 动轮高度应尽量小 。 13 导 向轮和张紧装置 . 导 向轮 的前 后 位 置 根 据 驱动 轮 位 置 而定 , 通 常布 置在 前面 。引导轮 中心 离地 高度应 有利降
履带式挖掘机结构及原理

34
挖掘机械研究所
5.5.3、阀
35
挖掘机械研究所
P2
P1
右行走
直线行走
可选
左行走
铲斗
回转
动臂1
动臂2
斗杆2
斗杆1
36
挖掘机械研究所
1 2 3 4 5 6 7 8
16
挖掘机械研究所
C、回转支承漏黄油 原因:润滑脂、内外圈间隙太大、防尘圈太松 润滑脂:粘度低-泄露,要求3号锂基脂 内外圈间隙太大:(工作时上车晃动较大-可视测)-漏油-更换回转支承 防尘圈(橡胶圈)太松:橡胶老化、断裂或装配间隙太大-更换
17
挖掘机械研究所
D、支重轮漏油
原因:浮封环制品不良、泥沙或冰水使浮封环固结、O型圈老化 黄油嘴装配 检查:若发现O型圈严重磨损-使用中进入水、泥沙等经冻结或挤压 -O型圈与浮封环发生相对转动O型圈磨损-指导用户在湿地工况作业完后在 硬路面上行走,几分钟以将内部水分泥砂从壳体间隙处抖出(或空转)-更换支重轮 黄油嘴装配:生药带或打胶重新装配
46
挖掘机械研究所
- 先导油路
Px 压力 ↑
- 主油路
- 斗杆合流,流量增大,速度加快
ARM DUMP
47
挖掘机械研究所
斗杆回收 - 先导压力
Px 压力 ↑, 保持阀打开 流量再生
X架拼焊结构—9T、15T、22T、33T
分体式结构—45T
14
挖掘机械研究所
5.1.4 典型故障
A、回转异响
原因:回转马达、回转减速机、回转支承 检查步骤:
掘进机履带式行走机构的研究_杨春海

行走机构制造成本低, 无链距 误 差 , 机 体 在 行 走 中 稳 定 , 安 装 、维
修方便, 但由于其滑动形式产生摩擦阻力大, 履带的使用寿命会
较滚动结构短, 因此适用于轻、小型掘进机。
3.4 履带板的合理设计 ( 1) 正确选用履 带 板 宽 度 。 在 满 足 机 器 接 地 比 压 的 要 求 下 ,
对 于 有 支 重 轮 的 履 带 行 走 机 构 , 其 制 造 成 本 高 , 安 装 、维 修
复杂, 由于履带节距与支重轮中心距的制造误差, 产生机体在行
走中的波动, 影响机体的稳定性, 但由于其滚动形式减小摩擦阻
力, 履带的使用寿命长, 适用 于 中 、重 型 掘 进 机 ; 无 支 重 轮 的 履 带
科学之友
Friend of S cience Amateurs
B 2008年 03月
掘进机履带式行走机构的研究
杨春海
( 煤炭科学研究总院太原研究院, 山西 太原 030006)
摘 要: 介绍了掘进机履带式行走机构的工作原理和性能特点, 对行走机构的组成、工作 原理、受力情况和影响行走装置的因素进行 了 分 析 , 提 出 了 一 定 的 解 决 思 路 , 为 行 走 机 构 的设计提供了一定的理论依据。 关键词: 掘进机; 履带; 行走机构 中图分类号: U415.0 文献标识码: A 文章编号: 1000- 8136(2008)03- 0001- 02
4 结束语
通过对履带行走装置的分析, 有助于履带行走装置的结构 和参数的确定, 对机器总体性能及可靠性的改善和提高具有一 定的实际意义。
作者简介: 杨春海, 男, 1980 年 3 月出生, 2001 年毕业于太原重型 机械学院机电系, 工程师。
履带行走机构功率损耗分析系统设计与实现
Xi n Ja t n i e st ’ io o g Un v r i a y,Xi n 7 0 4 ,Chn ; ’ 1 0 9 a ia
2 .Tay a sa c n tt t fChn a c n lg iu nRee rh I si eo iaCo l u Te h oo y& E gn e igGru r n ie rn o pCo p,
履带行走机构 功率损耗分析 系统设计 与实现
朱 爱斌 王 步 康 田 超 周 尧 陈 渭 , , , ,
( . 安 交 通 大 学 现 代 设 计 及 转 子 轴 承 系 统 教 育部 重 点 实验 室 , 西 西 安 7 0 4 ; 1西 陕 10 9 2 中 国煤 炭 科 工 集 团 太 原 研 究 院 , . 山西 太 原 0 0 0 ) 30 6
ZH U — i ,W ANG — a ,TI Aib n Bu k ng AN a ,ZH OU o Ch o Ya ,CH EN e W i
( . y La o a o y o d c t n M i ity f r Mo e n De i n a d Ro o - a i g S s e , 1 Ke b r t r fE u a i n s r o d r s n t rBe r y tm o g n
文章 编 号 :0 674 ( 0 10 —4 40 10 —5 X 2 l) 60 4 —5
De i n a m p e e t to fpo r l s na y i y t m o sg nd i l m n a i n o we o s a l s ss s e f r t a e e ha s o r c d v h c e r v lm c nim f t a ke e i l
掘进机履带行走机构设计参数分析

度, 同时还得保证整机的外形尺寸 , 以两条履带的 中心矩 与 所
履带 板 宽 度 b应合 理 配 合 , 们之 比一 般 推荐 在 35 . 间 。 它 . 5之 触 地 压 强 即 总 机 质 量 除 以 两 履带 的触 地 面积 ,主 履带板 的力学性能 、 掘进 机履 带的结
有效 功 就 会 增 加 , 回转 摩 擦 力 就 会 增 大 , 就 会 增 加 掘 进 机 的 但 这 回转 功 , , 会 增 加 输 I 功 率 , 低 有 效 功 输 出 , 带 板 所 受 的 牢 就 叶 J 降 履
2 掘进机 履带行走 机构主 要设计参 数计算 及选型
在 工 作过 程 中 , 道掘 进 机 要有 一 定 的 稳定 性 、 衡 性 。要 巷 平
图 1 履带式行走装置工作原理简图
想 提 高 掘 进 机 的 同转 输 f有 效 功 率 ,理 论 上 应 增 大 掘 进 机 的 宽 L ;
所有大型矿用机械都应用履带 行走机构 。掘进机行走机构 的作 用是承担整机的重量 ,支承和平衡 掘进机在 丁作过程 巾受到的 所有作用力和反作用力 , 同时进行作业过程 巾的行走和 回转。本
及 输 入 功 率 的计 算 公 式 , 阐述 了驱 动轮 、 重轮 及 张 紧轮 的设 计原 则 。 支
关键词: 掘进机 ; 履带行走机构 ; 设计参数 中图分类号 :D 2 . T41 5 文献标识码 : A
1 问题 的提 出
近几 年 来 , 随着 国家 经 济 建 设 的 深入 发 展 , 国能 源 的 需 求 我 量 也 日益增 加 , 炭 行 业 将 不 断 发展 壮 大 , 进 机 等 新 型设 备 得 煤 掘 到 广 泛 的应 用 。 由 于 掘进 机 履 带 行 走 机 构 相 比轮 式 行 走 机 构具 有输 f功 率 大 、 地 比压小 、 走 方便 、 易 同转 等 鲜 明 的 特 征 , ¨ 接 行 容
简易履带式行走机构的设计及通过性分析

简易履带式行走机构的设计及通过性分析吴哲,马岩*,杨春梅,李春,李虎,王海洋(东北林业大学,黑龙江哈尔滨150040)摘要:研究了国内外林间运输机械的现状,针对我国林间科学研究的需求,提出了简易履带式行走机构的设计方案,并对其在林间的通过性能进行了分析。
关键词:林区;简易式履带;越障中图分类号:TH122文献标识码:A文章编号:2095-2953(2013)12-0014-03Design and Passage Analysis of a Simple Crawler Walking MechanismWU Zhe,MA Yan*,YANG Chun-mei,LI Chun,LI Hu,WANG Hai-yang(Northeast Forestry University,Harbin Heilongjiang 150040,China)Abstract :The curre nt s ta tus o f fo re s t trans po rtatio n m a chine ry a t ho m e a nd a broa d is s tudied and a de s ig n s chem e fo r a s im ple cra wle r w a lking m echanis m ispre s e nte d in vie w of the de m a nd fo r wo o d s cience re s e arch,with the pas s a ge ca pa city o f the cra w ler wa lkingm echanis min thefores t ana lyz e d.Key words :fores t are a;s im plecraw le r;o bs ta clecro s s ing由于山区林地运输环境恶劣,我国主要还是利用畜力或人工来解决林区的生产运输问题,这大大降低了林间运输作业的生产效率[1]。
履带式挖掘机行走装置设计
履带式挖掘机行走装置设计前言课题研究的目的及意义挖掘机械是工程机械的主要类型之一,广泛应用于各个领域的机械化施工中。
本课题的目的是为挖掘机履带行走装置的设计提供方法和参考。
挖掘机械在工程机械发展中占有重要地位,尤其是中小型、通用的单斗挖掘机的作用更为突出。
然而,我国挖掘机行业在品种、数量和技术性能方面仍需进一步提高,这对于机械化水平的提高、国防建设和现代化建设的速度有着直接影响。
履带式液压挖掘机是一种常见的土石方开挖机械设备,广泛应用于各个领域的机械化施工中。
然而,由于其复杂的制造技术和内部结构,以及投入产出比高的特点,我国在挖掘机产品上与国际先进水平存在较大差距。
近年来,国产挖掘机品牌市场占有率逐步提升,一批具有较强自主创新能力的挖掘机生产商正在崛起。
然而,国内市场仍被国外品牌占据了80%的份额,因此对履带式挖掘机的深入研究势在必行。
通过选择此课题,我们可以进一步巩固和加深对工程机械知识的理解,并为我国挖掘机的具体结构设计和优化做出贡献。
同时,这也有助于培养我们的独立思考、综合运用知识、分析和解决问题、创新思维的能力。
特别是在方案设计、设计计算、工程绘图、文字表达、文献查阅、计算机应用和工具书使用等方面的基本工作能力。
挖掘机国内外研究现状国产挖掘机的功能相对单一,衍生产品较少。
国产挖掘机规格主要集中在30吨以下,6吨以下的规格比较齐全,形成了从1.5吨到30吨的系列产品。
然而,200吨以上的规格基本上没有国产产品,因此我国挖掘机仍处于“发展期”。
我国挖掘机企业在研发体系和试验体系建设方面仍处于初级阶段,产品的开发主要还是仿造为主,只有少数公司如山东众友自主开发了电控技术,大多数企业还在选购阶段。
节能减排、降噪安全部件的研发以及不同功能的附属装置的研发,只有个别企业才刚刚起步,大多数企业还没有涉足这些领域。
目前,我国挖掘机的质量问题主要表现在核心部件如结构件、电控和液压件,以及其他部件如轴销、司机室和四轮一带等。
履带式起重机行走机构故障分析及修复
履带式起重机行走机构故障分析及修复履带式起重机是一种依靠履带装置行走的移动式起重机械,依靠其独特的行走机构,使起重机具有带载行驶、接地比压小、爬坡能力强、转弯半径小等特点,行走机构的动态特性,直接影响着履带起重机整车的性能。
在平常的使用中常常出现走行跑偏的现象,使操作起重机的工作效率大打折扣。
为了解决这一问题,本文针对一个故障排查的实例来对整机液压系统进行探讨研究,加以AMESim为平台进行仿真分析,并提出一些日常使用中的建议。
1工作原理该起重机行走液压系统采用双泵、双马达结构,即左、右行走机构各有1个变量泵、1组控制主阀和I个变量马达,各自独立驱动。
以右侧为例:右控制主阀为力士乐MO-5205-00/4M0型电液控制阀。
该阀为四联阀,分别控制右侧履带的行走、主变幅机构、主钩和副钩。
压力油通过右控制主阀的右行走阀片后进入中心回转接头,再通过胶管及快换接头连接到右侧行走变量马达,将动力传递到右侧行走马达。
左侧与右侧相同。
2故障原因分析2.1磨损原因行走机构的机械部件承担自重、作业载荷及运行中的冲击载荷,还要受到砂石、泥水的污染侵蚀,工作条件恶劣,易被磨损。
从行走机构的结构分析,引导轮、支重轮和驱动轮三者的轴线必须和支重轮架的对称中心线重合,该中心线与起重机的半轴轴线垂直,才能保证履带吊直线行走,但驱动轮、托轮、引导轮及支重轮的轮齿磨损,轴承轴套、轴磨损及变形,使驱动轮、引导轮、支重轮与轨链发生啃削,严重时发生履带跑偏、脱轨,进一步加剧这些零部件的磨损,造成恶性循环。
1)土壤、砂石等不利外部环境对磨损的影响。
土壤和砂石对行走机构的影响主要体现在土壤的酸碱度和砂石的硬度、形状上,酸性土壤、带有锐角的碎石、硬度大的砂石等对零部件的腐蚀和磨损较为严重。
2)零部件之间压力及润滑的影响。
在相同材质下,磨损量与作用在零部件上的压力成正比,单位压力越大,磨损量也越大。
因此应尽量避免过大的单位压力。
缺少润滑使零件直接接触,加剧磨损的产生。
行走机器人运动结构特性分析

第19卷第3期湖 北 工 学 院 学 报2004年6月V ol.19N o.3 Journal of H ubei Polytechnic U niversity Jun.2004[收稿日期]2004-03-01[作者简介]段成龙(1980-),男,湖北武汉人,中国地质大学(武汉)硕士研究生,研究方向:机械设计及理论.[文章编号]1003-4684(2004)0620017202行走机器人运动结构特性分析段成龙,张 萌(中国地质大学机械与电子工程学院,湖北武汉430074)[摘 要]介绍了行走机器人的发展、分类、结构和运动特性,并详细叙述了几种典型的机器人行走机构和特点,最后介绍采用U G 设计软件对机器人结构设计的模拟仿真.[关键词]机器人;行走机构;仿真[中图分类号]TP24[文献标识码]:A 行走机器人是机器人学中的一个重要分支.关于行走机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式的和腿式的等.其次,必须考虑驱动器的控制,以使机器人达到期望的行为.第三,必须考虑导航或路径规划.因此,行走机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统.1 行走机器人的结构设计技术发展现状 机器人的机械结构形式的选型和设计,应该根据实际需要进行.在机器人机构方面,应当结合机器人在各个领域及各种场合的应用,开展丰富而富有创造性的工作.对于行走机器人,研究能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构.当前,对足式步行机器人、履带式和特种机器人研究较多,但大多数仍处于实验阶段,而轮式移动机器人由于其控制简单,运动稳定和能源利用率高等特点,正在向实用化迅速发展,从阿波罗登月计划中的月球车到美国最近推出的NASA 行星漫游计划中的六轮采样车,从西方各国正在加紧研制的战场巡逻机器人、侦察车到新近研制的管道清洗检测机器人,都有力地显示出行走机器人正在以其使用价值和广阔的应用前景而成为智能机器人发展的方向之一.2 几种行走机器人行走机构特点2.1 轮式行走机器人轮式行走机器人是机器人中应用最多的一种机器人,滚轮由电机直接驱动,它一般是将具有独立驱动装置、换向装置和制动装置的滚轮安装在由电机驱动的腿结构的末端,这些机构和装置在增强了行走机器人可操作性能的同时,也增加了机器人的重量,一定程度上限制了其机动性能.图1所示机器人是一种特殊的轮式机器人从动轮式机器人.从动轮式机器人作为特殊的轮式机器人,其滚轮是作为从动轮,滚轮上无任何附加主动力,通过水平连杆、垂直连杆和滚轮的协调动作,利用滚轮受到的法向摩擦力远大于切向力的特点,可以使系统受到的摩擦力合力指向前方,产生机器人驱动力,驱动机器人运动.从动轮式机器人可实现多种运动姿态,其功能相当于万向轮式行走机器人,具有较大的灵活性[1].该机器人是由四个装有滚轮的机械腿和机器人本体构成.每个腿有水平连杆和垂直连杆构成,四个腿协调运动.每个机械腿分别有两个直流控制电机驱动.第一个电机控制水平连杆的前后摆动,另一个电机控制垂直连杆内外摆动.根据运动形式,确定四个腿的水平连杆的初始摆角,通过四个腿上的水平连杆和垂直连杆的协调动作,可以调节机器人所受合力的大小和方向,使机器人按要求的路径滑行.2.2 履带式行走机器人履带式行走机器人的行走机构支撑面积大,接地比压小,适合于松软或泥泞场地作业,下陷小,滚动阻力小,对路况具有较强的适应性,常见于军用机器人.履带行走方式具有爬坡能力强、承载能力大的特点,因此也常被设计成某些民用机器人.图2所示机器人是一种特殊的履带式机器人四周履带式机器人的履带结构.该机器人采用四周履带驱动,并且多节串连,除可实现一般的直线移动和曲线移动外,还能在爬坡、越障、翻倒、翻滚、严重歪斜以致侧面受阻的状态下继续移动,它的移动状态比较特殊,其一般的曲线和直线移动相对较少,较多的情况则是在侧翻或倾覆状态、机身两面着地或者前后节相互扭转时的移动;在过沟或过台阶的情况下首节抬头越障时的移动.考虑到情况的复杂性,所以借鉴仿生学原理,采用四周履带行走机构,微电机驱动,整机的行走既可协调控制,又可各节单独控制,如整机中的某一节因倾斜而导致侧面受阻时,通过倾斜传感器控制侧面履带工作,从而使各节之间的推拉作用和履带控制转向的灵活性得到充分发挥,在抬头机构的协调作用下实现适应复杂地形的蛇形移动和整机翻滚移动的功能.该移动机器人整机结构采用多节串联构成(一般不少于3节),每一节都可以单独控制并自行移动,其本身又是由几个独立的履带驱动单元构成四周履带驱动机构.整机主要由行走系、传动系、绞接系、抬头系4部分组成.节与节之间采用广义万向节结构相连;首末2节各有一套柔性抬头机构[2].2.3 足式行走机器人根据调查,在地球上近一半的地面不适合于传统的轮式或履带式车辆行走.但是一般多足动物却能在这些地方行动自如,显然足式与轮式及履带式行走方式相比具有独特的优势.足式行走对崎岖路面具有很好的适应能力,足式运动方式的立足点是离散的点,可以在可能到达的地面上选择最优的支撑点,而轮式运载工具必须面临最坏的地形上的几乎所有点.足式运动方式还具有主动隔振能力[3].尽管地面高低不平,机身的运动仍然可以相当平稳.足式行走在不平地面和松软地面上的运动速度较高,能耗较少.足式机器人种类繁多,有单腿跳跃型、四腿移动型、仿生多足爬行类,以及高级的仿人双腿行走型等.3 行走机器人的仿真研究Unigraphics (简称U G )是目前先进的CAD 软件.该软件可以用来模拟各种机器设备的工作、运动状态,从而验证设备结构设计及参数设定的正确性和优化性.将U G 设计软件应用于机器人行走机构设计中,可以对机器人建立三维几何模型,实现可视化的运动过程模拟.同时,运用其本身的模块可进行一般的运动仿真,如将其模型用Parasolid 导入到ADAM 软件,则可进行更加详细和复杂的运动不和动力学分析.[ 参 考 文 献 ][1] 李金良.混合机构式机器人的动力学建模及参数变化[J ].机械科学与技术,2003,6(6):22-24.[2] 江 浩.新型移动机器人的结构设计[J ].应用科技,2002,3(3):56-58.[3] 殷际英.关节型机器人[M ].北京:化工工业出版社,2003.Movement Characteristic Analysis of R obotand Movement EmulationDUAN Cheng 2long ,ZHAN G Meng(Faculty of Mechanical &Elect ronic Engi n.,Chi na U niv.of Geosciences ,W uhan 430074,Chi na )Abstract :The development of the robot and its classification ,structure and movement characteristics are introd 2uled and walking structure of several kinds of typical robots and their characterisistcs are described in detail U G software is applied to the emulation of the fobit structual design K eyw ords :robot ;walking structure ;emulation[责任编辑:张培炼]81湖 北 工 学 院 学 报 2004年第3期 。
履带式支架搬运车行走机构分析
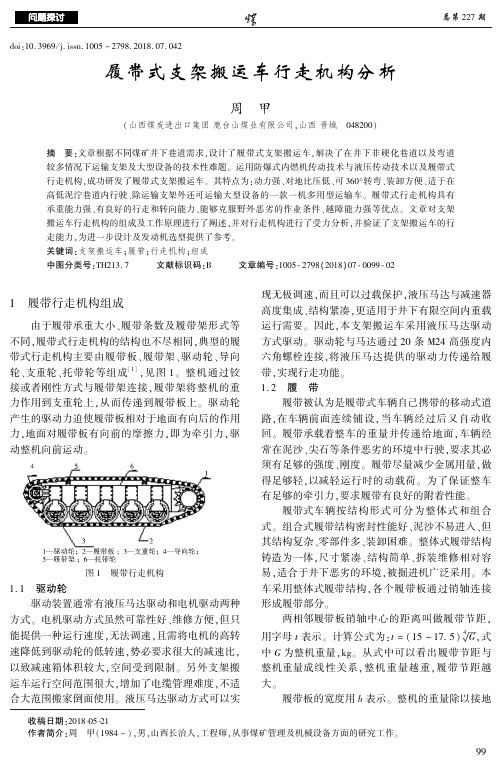
收稿日期:2018 05 21作者简介:周㊀甲(1984-)ꎬ男ꎬ山西长治人ꎬ工程师ꎬ从事煤矿管理及机械设备方面的研究工作ꎮdoi:10.3969/j.issn.1005-2798.2018.07.042履带式支架搬运车行走机构分析周㊀甲(山西煤炭进出口集团鹿台山煤业有限公司ꎬ山西晋城㊀048200)摘㊀要:文章根据不同煤矿井下巷道需求ꎬ设计了履带式支架搬运车ꎬ解决了在井下非硬化巷道以及弯道较多情况下运输支架及大型设备的技术性难题ꎮ运用防爆式内燃机传动技术与液压传动技术以及履带式行走机构ꎬ成功研发了履带式支架搬运车ꎮ其特点为:动力强㊁对地比压低㊁可360ʎ转弯㊁装卸方便㊁适于在高低泥泞巷道内行驶㊁除运输支架外还可运输大型设备的一款一机多用型运输车ꎮ履带式行走机构具有承重能力强㊁有良好的行走和转向能力㊁能够克服野外恶劣的作业条件㊁越障能力强等优点ꎮ文章对支架搬运车行走机构的组成及工作原理进行了阐述ꎬ并对行走机构进行了受力分析ꎬ并验证了支架搬运车的行走能力ꎬ为进一步设计及发动机选型提供了参考ꎮ关键词:支架搬运车ꎻ履带ꎻ行走机构ꎻ组成中图分类号:TH213.7㊀㊀㊀文献标识码:B㊀㊀㊀文章编号:1005 2798(2018)07 0099 021㊀履带行走机构组成由于履带承重大小㊁履带条数及履带架形式等不同ꎬ履带式行走机构的结构也不尽相同ꎬ典型的履带式行走机构主要由履带板㊁履带架㊁驱动轮㊁导向轮㊁支重轮㊁托带轮等组成[1]ꎬ见图1ꎮ整机通过铰接或者刚性方式与履带架连接ꎬ履带架将整机的重力作用到支重轮上ꎬ从而传递到履带板上ꎮ驱动轮产生的驱动力迫使履带板相对于地面有向后的作用力ꎬ地面对履带板有向前的摩擦力ꎬ即为牵引力ꎬ驱动整机向前运动ꎮ图1㊀履带行走机构1.1㊀驱动轮驱动装置通常有液压马达驱动和电机驱动两种方式ꎮ电机驱动方式虽然可靠性好㊁维修方便ꎬ但只能提供一种运行速度ꎬ无法调速ꎬ且需将电机的高转速降低到驱动轮的低转速ꎬ势必要求很大的减速比ꎬ以致减速箱体积较大ꎬ空间受到限制ꎮ另外支架搬运车运行空间范围很大ꎬ增加了电缆管理难度ꎬ不适合大范围搬家倒面使用ꎮ液压马达驱动方式可以实现无极调速ꎬ而且可以过载保护ꎬ液压马达与减速器高度集成㊁结构紧凑ꎬ更适用于井下有限空间内重载运行需要ꎮ因此ꎬ本支架搬运车采用液压马达驱动方式驱动ꎮ驱动轮与马达通过20条M24高强度内六角螺栓连接ꎬ将液压马达提供的驱动力传递给履带ꎬ实现行走功能ꎮ1.2㊀履㊀带履带被认为是履带式车辆自己携带的移动式道路ꎬ在车辆前面连续铺设ꎬ当车辆经过后又自动收回ꎮ履带承载着整车的重量并传递给地面ꎬ车辆经常在泥沙㊁尖石等条件恶劣的环境中行驶ꎬ要求其必须有足够的强度㊁刚度ꎮ履带尽量减少金属用量ꎬ做得足够轻ꎬ以减轻运行时的动载荷ꎮ为了保证整车有足够的牵引力ꎬ要求履带有良好的附着性能ꎮ履带式车辆按结构形式可分为整体式和组合式ꎮ组合式履带结构密封性能好㊁泥沙不易进入㊁但其结构复杂㊁零部件多㊁装卸困难ꎮ整体式履带结构铸造为一体ꎬ尺寸紧凑㊁结构简单㊁拆装维修相对容易ꎬ适合于井下恶劣的环境ꎬ被掘进机广泛采用ꎮ本车采用整体式履带结构ꎬ各个履带板通过销轴连接形成履带部分ꎮ两相邻履带板销轴中心的距离叫做履带节距ꎬ用字母t表示ꎮ计算公式为:t=(15~17.5)4Gꎬ式中G为整机重量ꎬkgꎮ从式中可以看出履带节距与整机重量成线性关系ꎬ整机重量越重ꎬ履带节距越大ꎮ履带板的宽度用b表示ꎮ整机的重量除以接地99面积为接地比压ꎬ履带板的宽度与工作条件下的接地比压有关ꎬ接地比压越小ꎬ履带板的宽度越大ꎬ一般参照以下公式计算:b=(0.9~1.1)ˑ2093Gˑ10(-3))ꎬ式中G为整机重量ꎬkg[1]ꎮ1.3㊀支重轮支重轮承受着搬运车整机的重量ꎬ并将重量传递到履带上ꎮ支重轮在履带上滚动行驶ꎮ支重轮被轮缘夹持在履带上ꎬ确保支重轮在履带上前后滚动ꎬ不能落带ꎮ搬运车在煤矿井下作业ꎬ巷道内经常会有积水㊁煤泥ꎬ作业条件恶劣ꎬ对支重轮轴封密封性能有更高的要求ꎮ支重轮的个数会随着整机重量的增加而增加ꎬ支重轮的布置要考虑到支重轮之间㊁与导向轮和托链轮之间的配合ꎬ防止相互干扰ꎮ除此之外ꎬ还应该考虑到整机接地比压均匀分布问题ꎬ尽量选用比较大的支重轮降低支重轮的滚动阻力ꎬ提高整车的行走效率ꎮ而对于低速行驶的履带车辆通常采用比较小的多个支重轮ꎬ均匀分布ꎬ并且在不影响使用的前提下尽量增长履带的接地长度ꎬ降低接地比压ꎮ1.4㊀托带轮托带轮固定在履带架上ꎬ与上履带接触ꎬ起托撑作用ꎮ托带轮的作用是将履带托住ꎬ减少履带的下垂量ꎬ同时防止履带过于振动和侧向滑移ꎮ托带轮的安装高度应与履带正常行驶时的高度相近ꎬ为了防止振跳ꎬ可以将托带轮安装高度增加ꎬ但会增大与履带的摩擦ꎬ影响行驶效率ꎮ托带轮安装数量与驱动轮与导向轮轴距大小有关ꎬ大于2m时ꎬ一般安装2组托带轮ꎬ小于2m时安装1组托带轮ꎮ1.5㊀导向轮一般情况下ꎬ将导向轮的位置设计在前面ꎬ驱动轮布置在后面ꎬ导向轮的设计以降低车辆重心为宜ꎮ在设计过程中ꎬ通常会将导向轮位置设计为可调ꎬ前后可调范围超过履带节距的二分之一ꎬ当在车辆行驶过程中履带磨损节距变长时ꎬ可取下一节履带板ꎬ仍可以保持履带的张紧度ꎮ2㊀履带式行走机构受力分析支架搬运车在匀速行驶的时候ꎬ分别受到4个力的作用ꎮ行驶方向的牵引力FQ㊁反方向的行驶阻力FZ㊁重力G和地面支撑力FCꎬ如图2所示ꎮ发动机通过传动系统将动力传递给驱动轮ꎬ产生驱动力矩称作MQꎬ在驱动力矩MQ的作用下ꎬ在驱动轮与最近1个支重轮之间的履带段产生一个拉力Tꎬ拉力T有将这段履带拉出的趋势ꎬ而履带被整台车重G压住ꎬ车身的压力会产生一个与拉力T方向相反的摩擦力ꎬ即为车辆的牵引力FQꎮ当牵引力FQȡFZ时车辆才能行走ꎮ车辆的牵引力FQ由发动机驱动力提供ꎬ行驶阻力由车辆的重力G产生的机械附着力提供ꎬ也就是说当车辆驱动力大于等于机械附着力时车辆就可以行走ꎮ图2㊀履带行走机构受力2.1㊀履带最大驱动力计算履带最大驱动力发生在重载爬坡工况ꎬ其值为:T2=Tf+Ti=Gfg+Ggsinα=Gg(f+sinα)ꎮ式中:T2为履带行走机构牵引力ꎻTf为履带行走机构滚动阻力ꎻTi为履带行走机构坡道阻力ꎻf为履带行走机构滚动阻力系数ꎬ一般取0.1ꎻα为最大设计坡度角ꎬ本计算取12ʎꎻG为支架搬运车重载重量ꎬ取60150kgꎻ重载时ꎬT2=60150(0.1+sin12)ˑg=18520ˑ9.8=181.6kNꎮ2.2㊀履带机械附着力Pψ履带机械附着力与道路状况有关ꎬ道路状况用附着系数Ψ来表示ꎬ根据巷道状况取Ψ=0.7ꎮPψ=ΨˑGˑg=0.7ˑ60150ˑ9.8=412.6kNꎮ履带行走机构中附着力必须大于行走阻力即:Pψ>T2ꎮ支架搬运车T2已在上面算出为181.6KNꎬ所以附着力能满足行走要求ꎮ3㊀结㊀语通过对履带式支架搬运车的行走机构的结构进行阐述ꎬ对搬运车进行受力分析研究ꎬ结果表明:当履带式支架搬运车在重载工况下ꎬ即最大驱动力时ꎬ支架搬运车提供的机械附着力可以满足行走要求ꎮ参考文献:[1]㊀赵文生.履带式行走机构设计分析[J].湖北农机化ꎬ2010(4):56-58.[责任编辑:常丽芳]0012018年7月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀周㊀甲:履带式支架搬运车行走机构分析㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷第7期。
悬臂式掘进机履带行走机构设计分析

1 ) 单侧 履带行 走 机构牵 引力 的计 算确 定 在正常的工作情况下, 履带行走机构的转弯运动与掘进机的行走和爬坡运 动不会同时进行, 掘进机转弯时, 单侧履带产生的牵引力最大, 因此, 在计算单 侧履 带行走 机构的 牵引力 时 , 选 择转弯 时履带的 牵引力作 为计算 的根据 , 那么 :
据公式( 3 P 为1 8 . 7 k W。 因此液压马达选型为A2 F 6 3 。 3 ) 泵站 电机的功 率选 择 行 走需 要 电动机 的功率 为 :
( a ) 主 视 图
P n = 2 P /nV l n n j( 5 ) 式中 P 为 单侧履 带行走 机构 的输入 功率 , k W; n v . 为 液压 马达 的效率 t n 为 液压泵 的 效率 ; n 为 功率 传输 的损 失 } n v 、 n、 取0 . 9 , n 取O 9 5 , 根 据 公 式( 5 ) ; l  ̄ - P n = 4 8 k W。 因此 选择 电动机 型号 为YB 2 5 0 M- -4 , 功 率为 5 5 k W, 转 动速 度为1 4 7 0 r / mi n。 3小 结 本 文对 悬臂 式掘进 机 的结 构进行 了 分析 , 并对 其 主要 部件 行走部 进 行设 计分 析。 对 其履 带式 行走机 构 的传 动方 案进行 设计 , 并对行 走部 的具体 部件履 带、 液 压 马达 、 电机 的选 择设 计进 行了 分析 , 为 后续 悬臂 式掘 进机 的研 究 奠定 了基 础 。 参 考 文 献 [ 1 ] 毛君 , 吴常 田 , 谢苗 . 浅谈 悬臂 式 掘进机 的 发展 及趋 势【 J ] . 中国机 械 工 程学报, 2 0 0 7 , 5 ( 2 ) : 2 2 4 2 . ( 1 )
履带式车辆关键机构分析与设计_巩青松
2008年第4期农业装备与车辆工程【设计与研究】农业装备与车辆工程AGRICULTURALEQUIPMENT&VEHICLEENGINEERING2008年第4期(总第201期)No.42008(Totally201)履带式车辆关键机构分析与设计巩青松1,董阿忠2,陈靖芯1,秦永法1,袁鹤来1,习强1(1.扬州大学机械工程学院,江苏扬州225009;2.江苏省灌溉动力管理二处,江苏南京211500)摘要:分析与设计了履带式作业车的行走系、传动系和操纵机构。
在分析履带式作业车的行走系结构形式的基础上,运用驱动力与行驶阻力平衡方程对驱动力进行了分析与计算,为车辆发动机的选型提供依据;采用了一种液压传动与机械传动相结合的传动方式,确定了传动系的关键设计参数;操纵机构采用了集中操纵方式。
履带式车辆行走系的力学分析方法适用于履带式车辆的设计与开发。
液压传动与机械传动相结合的传动方式,不仅可以使发动机功率分配合理,而且可以提高车辆的操纵性能。
集中式操纵杆布置形式使车辆结构紧凑。
分析与设计方法已成功用于某履带式作业车辆的样机研制。
关键词:履带式车辆;分析;设计;行走系;液压无级变速;操纵机构中图分类号:U469.6+94文献标识码:A文章编号:1673-3142(2008)04-0010-06收稿日期:2008-02-01基金项目:科技部创新基金项目(07C26143201357)作者简介:巩青松(1972-),男,扬州大学机械工程学院车辆工程专业硕士生。
AnalysisandDesignforKeyMechanismsofaTrackedVehicleGONGQing-song1,DONGA-zhong2,CHENJing-xin1,QINYong-fa1,YUANHe-lai1,XIQiang1(1.MechanicalEngineeringSchoolofYangzhouUniversity,Yangzhou225009,China;2.TheSecondAdministrationDepartmentofIrrigationPowerofJiangsuProvince,Nanjing211500,China)Abstract:Runningsystem,energytransmissionsystemandcontrolmechanismofatrackedworkingvehicleisanalyzedanddesigned.Withanalyzingthestructurestyleofrunningsystem,driveforceisformulizedusingthebalanceequationofdriveforceandrunningresistance,andtheformalizationofdriveforcewillmakechoosingaengineforatrackedvehiclemoreeasy.Theanalysismethodologyissuitabletodevelopingatrackedvehicle.Severalkeyperformanceparametersoftransmissionsystemaredetermined,andthetransmissionsystemconsistsofahydraulicstatictransmission(HST)andamechanicalgeartransmission.Thecombinedstyleofpowertransmissioncannotonlybebeneficialtopowercollocationrationally,butalsobehelpfultoperformanceimprovementofoperationmechanism.Atthesametime,atrackedvehiclecanbemademorecompactbyusingakindofintegratedcontrolstyleofmanipulationoperationmechanism.Themethodofanalysisanddesignhasbeenappliedsuccessfullytoaprototypedevelopingofatrackedworkingvehicle.KeyWords:trackedvehicle;analysis;design;runningsystem;hydraulicsteplesstransmission;controloperationmechanism引言履带是人类继发明车轮之后又跨出的一大步,扩展了车辆由“线”到“面”的活动范围,既加强了离开道路的越野能力,同时也增大了负重能力。
履带式行走机构设计分析和研究_赵瑜(1)

履带式行走机构设计分析和研究赵 瑜1,闫宏伟2(1.山西北方风雷工业集团有限公司成套装备研究所,山西太原030009;2.中北大学机械工程与自动化学院,山西太原030051)摘 要:履带式行走机构是大型机械等整机的支承件,用来支承整机的重量,承受机构在工程作业过程中的产生力,并完成整机在行进、后退、转场、作业时的移动。
因此,对于大型机械(包括工程机械、冶金机械等)的底盘,一般设计成履带驱动结构,履带沿着整机纵向中心对称布置。
本文主要研究讨论履带行走机构的设计原则和运动受力分析,总结机构行走时的影响因素,以达到整个机构结构合理、安全可靠、行动灵活的目的。
关键词:履带行走机构;运动受力;驱动;影响因素中图分类号:T H213 7 文献标志码:ADesign Analysis and Research on Tracked Walking MechanismZH A O Y u1,Y AN H ongw ei2(plete Equipment Resear ch Institute of Shanxi Beifang Feng lei Industry Gr oup Co.,L td,T aiyuan030009,China;2.M echanical Engineer ing and A utomation Institute,N ort h U niv ersity of China,T a iyuan030051,China)Abstract:T he tr acked w alking mechanism is the suppor ting part for w hole machine,such as heav y mechanism is applied to bear w eight o f the w hole machine,to r eceive forces fo rmed in the engineer ing wo rking pro cess o f mechanisms,and to per for m mo vement of w ho le machine while walking fo rw ard or backwar d,ro tating,and w orking.T her efo re,tracked driv e co nstr uction is generally adopted fo r heav y mechanisms(including eng ineering mechanism,metallurg y mechanism,etc), T he carter pillars are sy mmetrically disposed along the long itudinal ax le o f the who le machine.T his ar ticle mainly discussed desig n pr inciple and dynamic lo ad of tracked w alking mechanism,summarized influence factors o f mechanism in walking to meet reasonable st ructur e,safety and flex ibility r equest s.Key words:T racked w alking mechanism,D ynamic lo ad,Driv e,Impacting facto rs履带行走机构主要由导向轮、张紧装置、履带架、支重轮、驱动装置、托链轮及履带板等组成,如图1所示。
四足步行机器人行走机构设计毕业设计

四足步行机器人行走机构设计毕业设计篇一:四足步行机器人腿的机构设计毕业论文毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of designconcepts and approach to the design of walking and (原文来自:小草范文网:四足步行机器人行走机构设计毕业设计)the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords: SolidWorks; four-legged walking robot 目录摘要 ................................................ ................................................... . (I)Abstract .......................................... ................................................... (II)1 绪论 ................................................ ................................................... .. (1)1.1 步行机器人的概述 ................................................ .. (1)1.2 步行机器人研发现状 ................................................ . (1)1.3 存在的问题 ................................................ .. (5)2 四足机器人腿的研究 ................................................ .. (6)2.1 腿的对比分析 ................................................ . (6)2.1.1 开环关节连杆机构 ................................................ (6)2.1.2 闭环平面四杆机构 ................................................ . (9)2.2 腿的设计 ................................................ (11)2.2.1 腿的机构分析 ................................................ (12)2.2.2 支撑与摆动组合协调控制器 ................................................ . (18)2.3 单条腿尺寸优化 ................................................ . (21)2.3.1 数学建模 ................................................ .. (21)2.3.2 运动特征的分析 ................................................ .. (23)2.4 机器人腿足端的轨迹和运动分析 ................................................ . (24)2.4.1 机器人腿足端的轨迹分析 ................................................ .. (24)2.4.2 机器人腿足端的运动分析 ................................................ .. (27)3 机体设计................................................. ................................................... . (30)3.1 机体设计 ................................................ (30)3.1.1 机体外壳设计 ................................................ (30)3.1.2 传动系统设计 ................................................ (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 ................................................ ................................................... (36)4.1 论文完成的主要工作 ................................................ .. (36)4.2 总结 ................................................ ................................................... .. 36参考文献 ................................................ ................................................... .. (37)致谢 ................................................ ................................................... (39)1 绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
装煤机履带行走机构分析与选用
装煤机履带行走机构分析与选用履带行走机构广泛应用于工程机械、煤矿机械中,如工程挖掘机械、煤矿井下掘进与装载机械等。
履带行走机构具有接地面积大、接地压力小、转弯半径小等特点,它主要是由导向轮、张紧装置、履带架、履带链、支重轮、驱动装置等组成的。
标签:履带行走机构驱动装置内置式外置式1 基本形式结构[1]目前,履带行走机构基本采用两种形式结构,一种是履带行走动力装置内置在履带架中,如图1所示;另一种是履带行走动力装置外置于履带架一侧,一般多在内侧,如图2所示。
内置式的履带板宽度尺寸不受影响,工程机械基本采用这种形式结构;外置式的履带板宽度尺寸受动力装备的约束,调整受到一定限制,煤矿掘进设备中,两种形式结构都有采用。
采用履带行走机构的机械设备,动力装置基本采用液压传动,用液压马达作驱动元件。
马达在履带架上安装的方式不同,对履带行走机构适用的作业场合有一定影响。
动力装置内置式,履带架结构受内置动力元件制约,外形几何形状较大,随着动力的增大,外形尺寸也随之增大。
动力装置内置式,履带板宽度可按实际需要设计,不受履带架及动力装置的约束。
动力装置外置式,侧掛在与机架连接的一侧,动力侧掛链轮设计不受动力元件约束,履带行走机构外形尺寸可相对较小,适宜施工场地相对低矮狭小的煤矿井下作业。
我们公司设计制造的装煤机就是采用这种形式结构,其设计依据之一就是基于上述对两种结构的初步分析比较。
1.1 内置式结构[2]动力装置内置的履带行走机构,多数是采用轴向柱塞马达与大速比行星传动机构组合的动力装置。
动力装置安装在履带架中,履带驱动链轮直接安装在动力装置输出壳体上,与动力装置组成一体,装上组装式履带板,动力装置和履带架等一起包裹在履带形成的闭环中,动力元件不易受外力碰撞而损坏。
由于履带链轮与动力装置组成一体,链轮几何尺寸受到动力装置壳体几何尺寸的影响,内置式履带行走机构几何尺寸相对较大。
根据牵引力公式,T=式中:T——牵引力NMm——动力装置输出转矩N·mR——驱动链轮节圆半径mηm——液壓马达机械总效率%可以看出,当驱动链轮节圆半径增大时,要得到需要的牵引力,动力装置输出转矩就要相应地增大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 .M e h n c lEn i e rn n t ma i n I s i t ,No t i e st fCh n ,Tay a 3 0 1 c a ia g n e i g a d Au o t n t u e o t r h Un v r i o i a y i u n 0 0 5 ,Ch n ) ia
走机构 的设计 原则 和运动 受 力分析 , 结机 构 行走 时 的影 响 因素 , 总 以达 到 整 个机 构 结 构合 理 、 全 可靠 、 安
行 动 灵 活 的 目的 。
关键 词 : 带行走 机 构 ; 履 运动 受 力 ; 驱动 ; 影响 因素 中图分类 号 : 1 . TH 2 3 7 文 献标 志码 : A
Ab t a t: sr c The ta ke l i g m e ha im st e s r c d wa k n c n s i h upp tn r o h e m a h n ori g pa tf rw ol c i e,s c a e ha s i p id u h ashe vy m c nim sa ple
ZH AO u Y ,Y A N o H ngwe。 i
ቤተ መጻሕፍቲ ባይዱ
De in A n l ss a d Re e r h o a ke a ki g M e ha im sg a y i n s a c n Tr c d W l n c n s
( . mp e e E u p n s a c n t u e o h n i e f n - e g e I d s r o p C . 1 Co l t q i me tRe e r h I s i t fS a x i g F n l i n u t y Gr u o ,L d,Tay a 3 0 9 t B a t i u n 0 0 0 ,Ch n ia;
摘 要 : 带式行走机 构是 大型机 械 等整机 的 支承件 , 履 用来 支承 整机 的 重量 , 受机 构 在 工程作 业过 承
程 中的产 生 力 , 完成整机 在行进 、 并 后退 、 场 、 业 时的移动 。 因此 , 于 大型机械 ( 转 作 对 包括 工程机 械 、 冶金
机械 等 ) 的底 盘 , 一般 设计 成履 带驱动 结构 , 履带 沿着整机 纵 向 中心 对称 布 置。 本文 主要 研 究讨论 履 带行
履 带 式行 走机构 设计 分析和研 究
赵 瑜 闫宏 伟 ,
( . 西北 方 风 雷工 业 集 团有 限 公 司 成 套装 备研 究所 , 1山 山西 太 原 0 0 0 ; 3 0 9 2 中北 大学 机 械 工 程 与 自动 化 学 院 , . 山西 太 原 0 0 5 ) 3 0 1
t e rweg to h o e ma h n ,t e ev o c s f r d i h n i e rn r i g p o e s o c a ims n o o b a ih f t e wh l c i e o r c i e f r e o me n t e e g n e i g wo k n r c s f me h n s ,a d t p r o m v me to o ema h n i l i g f r r r b c wa d o a ig,a d wo k n .Th r f r ,ta k d d i e e f r mo e n fwh l c i e wh l wa kn o wa d o a k r ,r t t e n n r ig e eo e r c e rv c n t u t n i e e al d p e o e v c a ims( n l d n n i e rn c a im ,me a l r y me h n s ,e c , o sr c i s g n r l a o t d f r h a y me h n s o y i cu i g e g n e i g me h n s t l g c a im u t) Th a t rp l r r y e c r e i a sa e s mme rc lyd s o e l n h o g t d n l x e o h o ema h n .Th sa t l man y d s u s d l tia l ip s d ao g t e ln i i a l ft ewh l c i e u a i ri e c i l ic s e d sg rn i l n y a c l a f ta k d wa k n c a im ,s mma ie n l e c a t r fme h n s i l i g t e i n p i cp e a d d n mi o d o r c e l ig me h n s u rz d i fu n e f c o s o c a im n wak n o me t e s n b e S r c u e s f t n l x b l y r q e t. e a o a l t u t r , a e y a d f i i t e u s s r e i Ke r s Tr c e l i g me h n s y wo d : a k d wak n c a im,Dy a c l a ,Dr e mp c ig f c o s n mi o d i ,I a tn a t r v