侧扫声呐系统技术规格及要求
声呐设备技术规格书

声呐设备技术规格书
一、简述用途(项目建设或仪器设备使用的总体描述)
声呐设备可用于三维现场勘察、三维结构检查、钻塔分解、桥梁检查、水下计量、易操作、一键扫描、3D影像无需位置信息、便于与激光扫描仪集成、紧凑型设计、节省空间。
二、设备清单
三、拟定的技术要求及技术方案
声呐可用于低可见度/零可见度环境探头单元允许全功能声纳在小型船舶显示器彩色式样显示回波全方位扫描设备。
全景成像声纳可生成水下地形、结构和目标的高分辨率图像。
只需触动按钮,三维扫描声纳就会生成水下景象的三维点云。
声呐采用紧凑型低重量设计,便于在三脚架或ROV上进行安装。
扫描声纳头和集成的云台可以生成扇区扫描和球面扫描数据。
在水下甚至在低照度或者零可见度的水下环境,可以获得陆地三维激光扫描一样的图像,这种图像可以与传统的激光扫描图像无缝拼接。
浅析侧扫声呐与多波束测深系统在珠海青洲快船航道“粤江城渔运85109”沉船应急扫测中的应用

浅析侧扫声呐与多波束测深系统在珠海青洲快船航道“粤江城渔运85109”沉船应急扫测中的应用作者:赖培伟张莉莉来源:《珠江水运》2016年第11期摘要:广州海事测绘中心利用SIS-1624型侧扫声呐和Reson Sea Bat 7125多波束测深系统对沉船失事海域进行了扫海测量。
本文介绍了这两种设备在对沉船应急扫测中发挥的重要作用和取得的一些经验。
关键词:扫海测量侧扫声呐多波束沉船应急扫测1.概述2015年10月14日14:00时,广州海事测绘中心接广东海事局应急任务通知书:10月11日15:00时左右,木质渔船“粤江城渔运85109”轮在概位22-11.576N,113-45.04E处沉没,据现场搜寻人员反馈,沉船处于漂移状态;至14日12:00时,珠海渔政船仍未搜寻到沉船,经协调南海预报中心对沉船漂移路径进行推算,需对沉船进行扫测(漂移路径推算以供参考),以确保珠海至香港高速客船通航安全。
经与广东海事局值班室和珠海海事局值班室沟通协调,对沉船预测漂移路径所经青洲快船分隔航道以下四点连线范围内水域进行扫测:A:22-11.81N,113-42.37EB:22-12.80N,113-45.94EC:22-10.92N,113-45.94ED:22-10.72N,113-42.55E扫测范围内平均水深在6m左右,过往船只特别是快船较多,给扫海测量带来不小的难度。
在本次沉船应急扫海测量中,我们主要采用了以下设备:(1)侧扫声呐为美国Benthos公司设计生产的SIS-1624型,采用先进的Chirp技术进行长距离扫描和短距离分辨率的CW脉冲两种技术的侧扫声呐系统。
该设备保证用户可以在不同距离都能获得高分辨率的侧扫图像。
而且系统拖鱼内置了姿态传感器,以很好的补偿由于拖鱼的姿态造成的数据质量下降问题。
主要技术指标:侧扫声呐扫描范围:每个通道25至500米频率范围:Chirp频率:110-130Khz,370-390KhzCW频率: 123 Khz和382Khz标配传感器颠簸和摇摆:范围:± 20度精度:± 0.2度分辨率:0.1度航向:范围:0至360度分辨率:0.1度(2)Reson Sea Bat 7125型多波束测深系统为丹麦Reson公司最新应用于500米以内的浅水型双频高分辨率多波束测深系统。
消防声纳
消防声纳
•测扫声纳:
•测扫声纳(Side Scan sonar)是利用声波的水下摄像装置,效果等同于在空气中使用照相机的效果,具有勘查水下物体,2维地形等功能。
是掌握水下环境的必备系统装置。
•用途:
•救援:探测沉船,坠落飞机,溺死者。
•军事:探测敌潜水艇,机雷,遇难船只。
•环境:探测人工渔草,水中废弃物,2维水下地形。
•土木:探测海底管道线路及海底电缆分布状态,水中构造物状态。
•规格:
•分辨率:≥3.5cm最大作业水深:500m
•牵引速度:最大8knots探测幅度:30~300m
•频率波段:455KHz±10KHz电源:110~240VDC,最大0.2A
•大小:80cm(长) 11.6cm(直径)
•重量:14kg(空气中)10kg(水中)
•传输幅度:10usec,20usec Chirp/50usec,100usec CW
•应用软件(S / W):
•影像过滤,自动/手动调整超音波影像,自动/手动调整时间变移增幅,超声波影像RAW数据放大功能,记录及设定探测路线、航迹,程序管理,编制探测报告书,确定目标物及标识功能,追踪目标物,显示彩色超音波影像,细部剪嵌,作业管理,实时应用及事后合成,水中探测高度修订功能,
•变换数据以便剪嵌对光电子地图(海底,½ ,水池),测定目标物的长度,面积/高度及标识功能。
•支持全国电子地图Mapping剪嵌S/W(Sea Viewer V2.0)。
侧扫声呐-69页精品文档

强反射 弱反射 正常反射 反射阴影
22
2、形成原因 2019/9/21
物质组成的影响 地形影响
23
•物质组成的影响
海面
海水
声呐拖体
海底
沉积物
Ar RAi
R 2V 2 1V 1 2V 2 1V 1
发射的声波在到达海底前,穿过的 是水体。若水体均匀,无声阻抗界 面,则无反射波。
垂 直 波 束 角
覆盖宽度太小,探测效率低
具有较高的工作频率 (几十KHz——几千KHz)
水体相对均匀,对波的吸收也较少 频率高的波探测分辨率较高
防止泥面下地层回波的干扰
三、侧扫声呐图谱内容
直达波 海面线 海底线 海底反射
海面上物体 水体中物体 甚至近海底地层中的物体
21
四、图谱的识别 2019/9/21
测线方向
测线组数量
设计的依据:工作目的、海底情况、调查区形态等 设计的原则:准确、高效、易操作性等
测线间距
平行测线间的距离
设计原则:满足规程或实现目标要求,高效。
设计依据:规程或实现目标要求,设备情况、水深情况、水体混浊度等。
•拖曳方式的选择
调查船固 定安装
适应的环境 浅水
优点 安全
侧拖
浅水
安全
尾拖
难度较大
•探测规范
地质调查 物体寻找
下达的技术要求 国家规范 行业规程
特殊现象探查
没有规范
•测线布设
测线:实现探测目的(一般为测区全覆盖探测),探测设备所需
要的航行探测路径。
计划测线:实现探测目的(一般为测区全覆盖探测),规划
的探测设备应航行的探测路径。
侧扫声纳与多波束测深系统在大连五·七空难搜救中的应用

图1测量范围扫海测量的主要仪器装备:扫测区位于大连港内,平均水深在9m左右,由于海洋污染和泥沙回淤,底质为污泥,海水浑浊,水下能见度非常差,只有20cm左右,打捞难度很大,于是对扫测定位提出了更高的要求。
在本次扫海测量中,我们主要配备了如下设备。
(1)侧扫声纳仪器型号:美国BENTHOS生产的SIs一1500型侧扫声纳工作频率:200kHz量程范围:25~500m横向分辨率:O.04m纵向分辨率:O.04m本次扫海时所使用工作参数:量程:50m,75m,100m拖曳方式:尾拖拖放电缆长度:20m航速:4~5节拖鱼入水深度:3~4m(2)多波束测深系统宽深比:3.5~4.7倍脉冲最大重复频率(PRF):15次/秒216图2在距预报概位南偏西约400m处发现大片可疑物体影象。
(见图3)图3通过对仪器反映的声像进行判读后,计算出飞机失事后的具体位置应在38。
56’59”N121。
39’57”E附近,并且通过影像初步判断飞机已经解体,不存在打捞上飞机整体的可能性。
通过判读计算,整理出10个较大体积可疑物体的具体位置。
根据第一次扫海结果,我们对信号可疑区域使用侧扫声纳又进行了二次扫测,测量区域为:2182.2多波束扫海多波束测深系统是目前世界上先进的海洋测深设备,可对海底地貌进行高精度和全覆盖测量。
可以提供水深图、平面等值线图、分色图、三维立体图、影像图等高技术产品。
根据侧扫声纳扫海的结果,又使用多波束对可疑区域进行了地毯式扫测。
扫测部分海底地貌的三维立体图如图4所示下。
图4根据声纳和多波束的扫海结果,陆续打捞出了大量的机体残骸,包括机首的右半部和部分飞机右侧舷窗、飞机的机翼、水平尾翼、垂直尾翼、发动机、发动机倒流罩、印有公司名称的机体外壳、座椅等等。
侧扫声纳与多波束测深系统在大连"五·七"空难搜救中的应用作者:李鲜枫, 张铁军, 黄永军作者单位:交通部天津海事局海测大队(天津)1.学位论文马纯芳基于MapObjects的海底地形地貌成图技术研究2008多波束测深系统具有全覆盖、高精度、高密度和高效率的特点,因而在大面积扫海测量、河道疏浚、水库测量、海底数据调查、海洋工程等众多领域得到广泛应用。
CM2型侧扫声纳操作手册-中文版

行测量数据重放和编辑的功能,该软件是 C-MAX 公司开发的免费分发的软件。(请注 意 MaxView 的操作说明不包含在本手册中) ◆ 拖鱼的接口和远距离遥控测量支持其它的 内接或外接的传感器。 ◆ 有多种可供选择的大功率绞车,同时有对较 短电缆的人工绞车。 ◆ 如果需要硬拷贝记录,有多种打印机可供选 择。 ◆ 远距离控制运行器(ROV)的配置可通过数 字化远距离遥控测量相关的接口来实现。
阅读本手册的重要性 CM2 的使用是比较简单的。系统的某些方面是比 较独特的,但即使是熟练的操作人员也应该在阅 读完本手册之后,才开始使用。 请遵照以下的注意事项。 用户的信息在显示器上有显示,只要按 INFO 键 即可。
无锡海鹰加科海洋技术有限公司 版权所有 翻录必究
3
CM2 侧扫声纳系统用户操作手册 C-MAX Ltd 2004-2.1 版本
任何外部设备,包括导航(NAV)数据源或回声 测深仪,在连接到 CM2 端口前,都必须检查接 地电压。其接地电压必须与 CM2 的数据采集器 的额定电压一致。如果不一致,则内部中央处理 器的印刷电路板(PCB)会被损坏。(该种损坏不 在保修范围之内)
单 CTU(控制/收发装置)的配置 如果一个第三方(非 C-MAX)的数据采集和显 示系统被使用,则 CM2 的拖鱼会通过一个 CM2 的控制/发送器(CTU)去连接那个第三方的系统, 而不是通过 CM2 的数据采集器、键盘和跟踪球 或鼠标。 参考附录 A3 中关于控制/发送器(CTU)的操作。
任何滑轮或导缆孔必须不小于所使用电缆的半径 大小,建议考虑使用较大的滑轮或导缆孔。使用 滑轮能降低磨损和减小回收拖缆所需要的力。 通常滑轮应当悬挂于横梁之上,当船转向而拖鱼 拖缆往前时,滑轮能够向任何一方移动。不管是 拖鱼,还是拖鱼拖缆,都必须设置于不会缠绕住 螺旋桨或方向舵或其它任何设备的位置。也许某 个中间位置能减小拖鱼拖缆由于船的摇晃而产生 的振荡,但却必须注意
侧扫声纳标准
侧扫声纳标准《侧扫声纳标准,探索海洋的秘密法宝!》嘿,朋友们!你们知道吗?在那广阔神秘的海洋世界里,侧扫声纳就像是一位超级侦探,而侧扫声纳标准呢,那就是这位侦探的行动指南!要是没有它,那可就像在茫茫大海中没有指南针的船只,晕头转向还不知道要驶向何方呢!不了解这个侧扫声纳标准,你对海洋的探索就像没头苍蝇一样,到处乱撞还找不到宝藏的影子!“声纳精度大作战:分毫必究才是真”在声纳精度的世界里,可不能有一丝马虎呀!就像射击比赛一样,差之毫厘谬以千里。
侧扫声纳的精度就如同我们手中的武器,必须要精益求精,分毫必究!这可不是开玩笑的,想象一下,如果声纳精度不准确,那我们就像是戴着模糊眼镜看世界,看到的东西都是模模糊糊的,还怎么能准确找到我们想要的海洋信息呢?比如说在探测海底地形的时候,如果精度不够,可能就会把一个小山丘看成平地,那可就闹大笑话啦!所以呀,一定要保证声纳精度,这才是探索海洋的正确打开方式嘛!“频率选择有诀窍:高低搭配才完美”哎呀呀,这频率选择可真是一门大学问呢!就好像我们听音乐,高音低音要搭配得恰到好处,才能奏出美妙的乐章。
侧扫声纳的频率也是如此呀!高频率就像是海洋中的“千里眼”,能看清细小的物体和细节;低频率呢,则像“广角镜”,能覆盖更大的范围。
你可不能只偏爱其中一个,要高低搭配才完美呢!比如说在寻找沉船的时候,先用低频率大致确定范围,再用高频率去仔细搜索,这样才能事半功倍呀!不然的话,就像只拿着放大镜或者只拿着望远镜,都不能全面地了解海洋的秘密呢!“数据处理要细心:马虎一点都不行”嘿,这数据处理可不能马虎呀!就像拼图一样,每一块都要放对位置,才能呈现出完整的画面。
侧扫声纳的数据处理就是要把那些杂乱无章的数据整理得井井有条,找出其中的规律和信息。
这可不是随随便便就能做好的,需要我们细心再细心!如果数据处理出了差错,那可就像是搭积木的时候放错了一块,整个结构都可能会倒塌呢!比如说在分析海底地貌的时候,一个错误的数据可能会让我们误以为那里有一座山,结果跑过去一看,啥都没有,那不是白跑一趟嘛!好啦,这就是侧扫声纳标准的几个关键要点啦!朋友们,一定要记住这些标准呀,它们可是我们探索海洋的秘密武器呢!有了它们,我们就能在海洋世界里畅游无阻,发现更多的奥秘和惊喜!让我们一起朝着这些标准努力吧,成为海洋探索的“超级英雄”,去征服那片广阔而神秘的蓝色领域!绝绝子呀,相信我们一定可以做到的!。
4125-P侧扫声纳
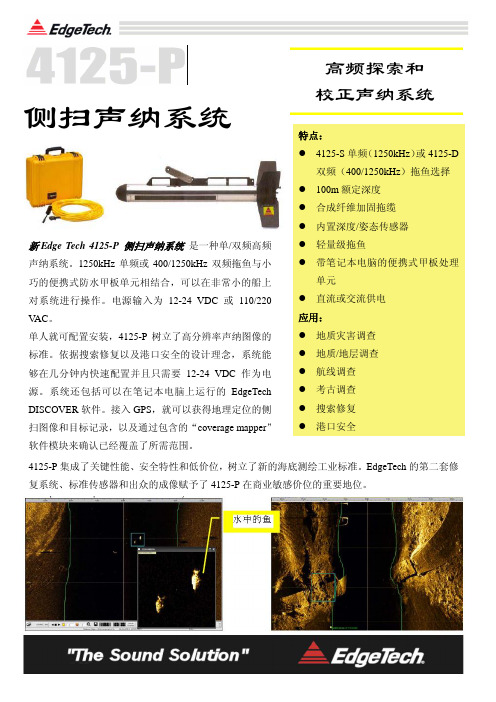
侧扫声纳系统高频探索和 校正声纳系统特点:4125-S 单频(1250kHz )或4125-D双频(400/1250kHz )拖鱼选择100m 额定深度合成纤维加固拖缆 内置深度/姿态传感器轻量级拖鱼 带笔记本电脑的便携式甲板处理单元直流或交流供电 应用: 地质灾害调查 地质/地层调查 航线调查考古调查 搜索修复 港口安全 新Edge Tech 4125-P 侧扫声纳系统 是一种单/双频高频声纳系统。
1250kHz 单频或400/1250kHz 双频拖鱼与小巧的便携式防水甲板单元相结合,可以在非常小的船上对系统进行操作。
电源输入为12-24 VDC 或110/220V AC 。
单人就可配置安装,4125-P 树立了高分辨率声纳图像的标准。
依据搜索修复以及港口安全的设计理念,系统能够在几分钟内快速配置并且只需要12-24 VDC 作为电源。
系统还包括可以在笔记本电脑上运行的EdgeTechDISCOVER 软件。
接入GPS ,就可以获得地理定位的侧扫图像和目标记录,以及通过包含的“coverage mapper ”软件模块来确认已经覆盖了所需范围。
4125-P 集成了关键性能、安全特性和低价位,树立了新的海底测绘工业标准。
EdgeTech 的第二套修复系统、标准传感器和出众的成像赋予了4125-P在商业敏感价位的重要地位。
主要技术指标4125-P 侧扫声纳系统 频率(单频或双频)400 kHz 1250 kHz调制 猝发音侧扫量程(最大) 300 米 70 米脉冲宽度 15-200 微秒 5-25 微秒 航迹方向分辨率 7 厘米 2 厘米 水平波束宽度 0.3° 0.2° 波束宽度 阵列大小中心频率中心频率6kHz 动态范围 12比特 ADC ,60 分贝 TVG换能器角俯角 向下倾斜20°垂直波束宽度 40°操作温度 0℃至45℃深度传感器 5%全刻度运动传感器 艏向,横摇,纵摇拖鱼技术参数拖鱼材料 不锈钢直径 8.9 厘米(3.5 英寸)长度 90 厘米(35.5 英寸)空气中质量 12 千克(26.4磅)拖缆长度 30-300 米拖缆类型 绞合铅缆拖曳速度 1-8 节操作深度(最大) 100米其它EdgeTech 产品侧扫,浅地层,用于深海拖曳系统、AUV 和ROV 的集成或组合成像系统,以及其它使用全频谱、多脉冲或合成孔径采样和处理技术的产品。
侧扫声呐测量技术要求

侧扫声呐测量技术要求侧扫声呐是一种常用于测量水深和海底地形的技术。
它通过发射声波并记录被回波所反弹回来的时间和强度,可以构建出水下的三维地形图。
在进行侧扫声呐测量时,有一些技术要求需要注意,下面将详细介绍。
首先,侧扫声呐测量需要选择合适的设备。
声呐设备应具备高精度和高分辨率的特点,以便准确地捕捉水下的细节信息。
同时,设备的频率和功率也需根据实际需要进行选择。
高频率的声呐适用于较浅的水域和海底地形复杂的区域,而低频率的声呐则适用于较深的水域和海底地形简单的区域。
其次,侧扫声呐测量需要进行准确的航迹规划。
在进行声呐测量时,需确定合适的航迹,以便覆盖需要测量的区域,并确保测量数据的完整和准确性。
航迹规划要考虑到水深、海底地形和测量目的等因素,能够尽可能地横向覆盖整个测量区域,并保持一定的重叠度,以便在数据处理时进行质量控制和验证。
此外,侧扫声呐测量还需要考虑环境因素的影响。
声波传播受水温、盐度、水流等环境因素的影响,因此在测量过程中需要注意对这些因素进行测量和记录。
在数据处理时,还需要对这些环境因素进行校正,以减小其对测量结果的影响。
在进行侧扫声呐测量时,还应注意数据的采集和处理。
采集数据需要保证声呐设备的稳定和准确性,同时要注意数据的时序信息和纵深信息的捕捉。
在数据处理时,需要对原始数据进行滤波、插值和重采样等预处理操作,以提高数据质量和减小噪声干扰。
同时,还需要对数据进行校正,包括校正水深、校正航速、校正航向等,以获得准确的测量结果。
最后,在进行侧扫声呐测量时,还需遵守相关的法规和标准。
根据不同的国家和地区,可能存在不同的法规和标准,包括声呐使用的频率范围、功率限制、测量速度和测量精度等。
在进行测量之前,需要对相关法规和标准进行了解,并遵守其要求,以保证测量的合法性和可靠性。
综上所述,侧扫声呐测量技术要求包括选择合适的设备、进行准确的航迹规划、考虑环境因素的影响、注意数据的采集和处理,以及遵守相关法规和标准。
侧扫声呐测量技术要求
侧扫声呐测量技术要求
侧扫声呐测量技术需要满足以下要求:
1. 高精度:侧扫声呐需要能够提供高精度的测量结果,测量误差应小于一定范围,以满足不同应用的精度要求。
2. 高分辨率:侧扫声呐需要能够提供高分辨率的海底地形信息,以便对复杂的海底地形进行精确地定位和识别。
3. 可靠性:侧扫声呐需要具备高度可靠性,能够在恶劣海况下正常工作,而且需要能够顺利完成长时间的海洋测量任务。
4. 实时性:侧扫声呐需要具备较高的实时性,能够实时反馈海底地形信息,在实时监测、海底勘探和紧急救援等领域有重要应用。
5. 灵敏度:侧扫声呐需要具备高灵敏度,能够检测到低反射率的海底物体,如浅海地形、障碍物等。
6. 易于安装和操作:侧扫声呐需要具备方便安装和操作的特点,以便在各种环境条件下快速启动和使用。
声纳等海洋物探仪器数据采集和处理简介

仪器参数指标
• G-881 铯光泵磁力仪
• 1 Hz 采样时0.005 nT 的灵敏度, 10 Hz 采样时0.02 nT 的灵敏度
• 工作范围:20000~100000nT • 用增压翼可增加下潜深度 • 最大入水深度300米 • 可将GPS位置转换为UTM坐标
带增压翼的 G-881
(二)光泵磁力仪原理
(二)AAE单道地震仪的主要技术指标
• 输出电压:直流3550V • 发射功率:分100,200,300,400和500焦耳五档 • 穿透深度:与沉积物的成分和结构有关,对淤泥为主的软地层最大穿
透深度可达100m。 • 地层分辨率:与使用的信号频带及地层性质有关,对浅表地层的实际
分辨率可达0.2~0.4m(由脉冲宽度确定的最高理论分辨率为7.5cm)。 • 可工作水深:2~300m • 测量船航速:一般2~6节
(三)AAE单道地震仪采集的地层剖面图
• 单道地震测图1(海底基岩)
单道地震测图2
单道地震测图3
单道地震探测成果剖面图
三、磁力仪
• 铯光泵磁力仪(G-881) 用于探测铁磁性金属物体 如铁壳沉船,集装箱等地下金属物,通
电电缆线等。
③ G-881铯光泵磁力仪
(一)G-881铯光泵磁力仪的组成
• 我所使用的声纳为主动声纳,它由发射机、声阵、接收机 (包括信号处理器)、显示控制台几个部分组成(见主动 声纳结构方框图)。它是向水中发射声波,通过接收水下 物体反射回波发现目标,并测量其参量。通过发射脉冲和 回波到达的时间差来估计目标距离。通过测量接收声阵中 两子阵间的相位差得到测定目标方位。
声纳系统构成
光源
透镜
滤镜 偏振镜片
光电管 H1线圈加拉莫频率的电磁场时,电子在塞曼磁次能级间重新发生跃迁, 致使光电信号随之变化。产生拉莫信号。
侧扫声呐技术规格书(评标综合评分稿)

侧扫声呐技术规格书标注“★”号的规格要求或参数为关键技术指标,如不满足将导致投标文件被拒绝。
标注“☆”号的规格要求或参数为重要技术指标,如不满足将逐项扣分。
未标注符号的规格要求或参数为一般技术指标,如不满足将累积扣分。
一、主要技术参数:★1)工作频率:低频:100~300KHZ;高频:400~600KHZ;★2)工作模式:支持CHIRP技术和同步双频工作模式★3)扫测量程(单侧):≥300米@低频☆4)水波束角:≤1.0°★5)工作水深:≥300米☆6)最小物标分辨率:0.5×0.5×0.5米☆7)波束数:支持多波束、多脉冲或多PING☆8)安装方式:拖曳☆9)拖鱼材质:316L不锈钢或钛合金☆10)工作航速:≥8节11)输入电源:24VDC或100~230VAC;12)工作环境温度:-25°C到45°C☆13)内置姿态传感器精度:航向精度及分辨率:≤±1.0°;0.1°横摇精度及分辨率:≤±0.3°;0.1°纵摇精度及分辨率:≤±0.3°;0.1°14)声呐数据采集和后处理软件15)数据采集和后处理工作站配置不低于以下要求:专业图形工作站;2.4GHz 8 核Intel Core i9 处理器;16GB DDR4 RAM ;AMD Radeon Pro 5500M 图形处理器(配备8GB GDDR6 显存);2TB 固态硬盘;屏幕分辨率不低于3072 x 1920 (226 ppi);64位WIN10专业版。
二.设备配置清单三. 售后服务1、提供齐全的技术资料,包括详细使用说明、安装使用手册等。
2、不少于3天的技术培训(不包含设备调试和验收)。
3、保修1年;保期内,除人为因素损坏外,全部免费维修。
4、设备出现故障后,供应商24小时内给出初步技术判断;如有必要,供应商工程师在48小时抵达用户现场进行维修。
侧扫声纳系统在海事应急扫测中的应用
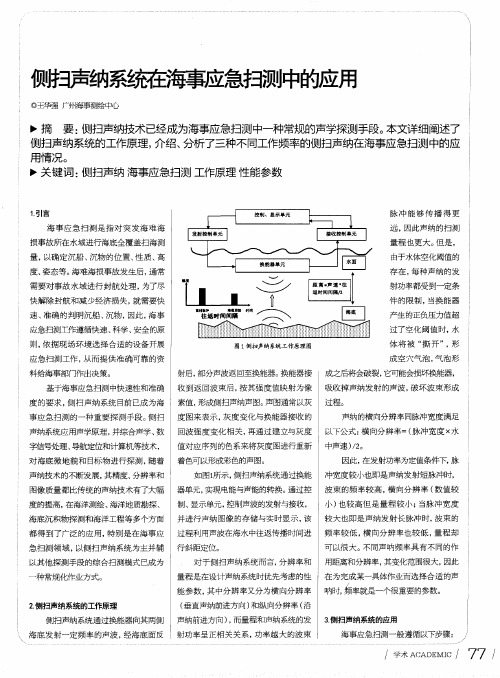
摘 要: 侧扫声纳技术已经成为海事应急扫测中一种常规的声学探测手段。 本文详细阐述了 l 贝 0 扫声纳系统的工作原理 , 介绍、 分析了三种不同工作频率的侧扫声纳在海事应急扫测中的应 用情况。 关键词 : 侧扫声纳 海事应急扫测 工作原理 性能参数
1 . 引言
对 海 底 微 地 貌 和 目标 物 进 行探 测 , 随 着 着色可 以形成 彩色 的声图 。
声纳技术的不断发展, 其精度、 分辨率和
如 图1 所示, 侧 扫声纳 系统 通 过换 能 冲 宽 度较 小也 即 是声 纳发 射 短 脉 冲 时,
图 像 质量 都 比传 统 的 声纳 技 术有 了大幅 器 单元 , 实现 电能 与声能 的转换 。 通 过控 波束 的频率较高 , 横向分辨率 ( 数值较 度 的提 高, 在 海 洋测 绘 、 海洋 地质 勘探 、 制、 显 示单 元 , 控 制声 波 的发 射 与接 收 , 小) 也较高但是量程较 小; 当脉 冲 宽 度
则, 依 据 现 场 环 境 选 择 合适 的设 备 开展
体将 被 “ 撕 开 ”, 形 成 空 穴气 泡 , 气泡形
应急扫测工作, 从而提供准确可靠的资 料给海事部门作出决策。
射后, 部分声波返回至换能器。 换能器接 成之后将会破裂, 它可能会损坏换能器,
基于海事应急扫测中快速 陛和准确 收到返 回波束届, 按其强度值映射为像 吸 收 掉 声 纳发 射 的声波 , 破 坏 波 束 形成 度 的要求 , 侧扫声纳系统 目前已成为海 素值, 形成侧扫声纳声图。 声图通常以灰 过 程 。 事应急扫测 的一种重要探测手段。 侧扫 度 图来表示, 灰度 变化与换能器接收的 声纳的横向分辨率同脉冲宽度满足
侧扫声呐_图像声呐资料

侧扫声呐水下搜救声纳旁侧声纳图像声呐简介品牌:DeepVision 型号:DE680SAR 加工定制:是类型:侧扫声纳外形尺寸:直径60mm*拖鱼长度850mm重量:空气中9kg,水中6.7kg产品用途:水底地貌调查,水下搜救规格:套Deepvision是高性能、低成本侧扫声纳,用于水下综合科考、沉船探测、水下溺水人员搜救、海底地形地貌研究、湖泊海洋测绘等。
Deepvision侧扫声纳可固定在船体(Hull Mount),也可以用作水下拖鱼(Towfish),水下拖鱼最深可用于水下100m。
系统可生成高质量水底图像,适用于各种海底应用和研究。
水下人员搜救需要相对于底部的极其精确的高度,DeepVision最新的DE680 SAR侧扫声纳专为水下人员搜救设计,可提供相对于底部的精确的高度。
DE680S AR侧扫声纳采用Chirp Digital技术,其优异的侧扫分辨率和精确的相对于底部的精确的高度,尤其适用于水下人员搜救等应用。
DE680SAR凭借优异的水下搜救性能,已被瑞典、奥地利、芬兰、加拿大、澳大利亚等国家的消防和搜救部门使用,并且在一次水下搜索中成功找到一具两年前失踪的尸体,之前警方动用其他各种搜救设备均未找到,而使用DE680SAR只用了不到一天的时间。
侧扫声纳拖鱼系统包括水下拖鱼、水面单元、连接电缆、Pelicase存储运输包和数据获取分析处理软件。
船挂侧扫声纳系统包括声呐换能器、水面电源、连接电缆、Pelicase存储运输包、数据获取分析处理软件。
DeepVision侧扫声纳性能特点:优异的图像质量;易于使用;紧凑设计;低成本、高性能。
DeepVision侧扫声纳技术参数:重量:空气中9kg,水中6.7kg;尺寸:直径60mm*拖鱼长度850mm;最长线缆长度:200m;拖鱼接口:RS485,GND,Supply,Fischer 103 DEE 4;软件支持:windows2000、XP、vista系统,支持GPS 输入,NMEA 数据RMC,GSV, 通讯波特率4800 bps;材料:不锈钢,PVC和聚亚安酯。
常用特种海测设备技术参数

目录常用特种海测设备技术参数 (2)一、SIS1500侧扫声纳 (2)二、SEA SCAN侧扫声纳 (6)三、G-882磁力仪 (7)四、Seaspy磁力仪 (8)五、SVPLUS声速仪 (9)六、SVPLUS v2声速仪 (10)七、Pressure Sensor压力传感器 (10)八、DSM-10姿态传感器 (11)九、HS-500姿态传感器 (13)十、OCTANS光纤罗经 (13)十一、DPL275音频发射器 (14)十二、Aquadopp海流计 (14)十三、Sensors水位计 (16)十四、YSM610水位计 (17)十五、便携遥报式水位计 (17)常用特种海测设备技术参数一、SIS1500侧扫声纳处理器:Pentium III 600 MHz CPU,双通道C40数字信号处理板,高速、高分辨率图形处理器操作系统:M icrosoft Windows NT声呐数据17”在高分辨率的1280×1024视频监视器上进行完整显示:的声呐参数控制,显示和处理软件操作数据记录:5.2 Gbyte M.O.磁光盘驱动器。
硬拷贝:EPC-1086-0 热敏记录仪I/O接口:LPT1、LPT2并行接口;COM1、COM1、COM3串行接口。
侧扫声呐采集处理/回放软件包主要处Chirp信号匹配滤波处理;侧扫声呐数据采集处理和存储;理功能:倾斜距离校正;航速校正;自动TVG补偿;波束角和掠射角改正;空间卷集滤波;目标测量/存储;航迹覆盖显示;操作参数显示和实时镶嵌显示。
数据格式:Q-MIPS、XTF、SEG-Y定位导航:每一次扫测都和定位数据结合;可接收来自定位系统的NMEA 0183和XY座标数据。
标记:手动或自动打标(通过导航计算机控制打标)电源:87~264VAC (自适应); 47~64 Hz尺寸:30.5cm×51cm×45.7cm 所有部件可安装在19”标准导轨架上重量:25kgTTV-195 拖曳载体声呐换能器频率:190-210kHz Chirp声源级:226dB re 1μPa@1m波束宽度:0.5︒×55︒水下电子设置量程设置:25-500m垂直航迹 < 4.0cm分辨率:A/D分辨率:16位Sigma-Delta A/D转换器采样率:每通道48kHz电源:48-150VDC(300W)水下传感器姿态:纵摇、横摇和艏向传感器水温:外部水温0-35︒C深度:拖曳船深度传感器,温度补偿精确到满量程的0.25%拖曳载体材料:316号不锈钢重量:36kg尺寸:直径4.5英寸(11.4cm),长70英寸(178cm)安全装置:可断裂式尾翼,拖曳载体保险钢缆。
侧扫声纳测量

侧扫声纳测量本单位目前使用的侧扫声纳是Benthos公司的SIS1624双频侧扫声纳系统,拖曳系统为TTV-196D双频(100/400kHz)拖鱼,其技术指标如下表所示:SIS 1624 声纳侧扫系统TTV-196D拖鱼技术指标在进行侧扫声纳测量时,根据测线间隔可以选择LF模式或HF模式,HF模式虽然图像较LF模式清晰,但由于其量程一般只适用于50m 以内,因而在普通的1:10000的侧扫声纳扫海中较少选择,但在具体测量时可以同时开启四通道测量,这种情况下采集的侧扫声纳数据打印时,需选择正确的打印通道。
1 仪器检校2 测线布设和导航定位2.1 测线布设测线布设分为普扫和精扫测线布设普扫测线布设时的原则就是保证足够的重叠带宽度,一般侧扫比例都是1:10000,为与水深测量同步,这种比例下一般的测线布设方法是平行于水流方向,100m间隔布线,量程采用100m,这样达到100%重叠,如发现可疑图像时需要布设精扫测线,精扫测线的布设应覆盖可疑图线区域,并垂直于普扫测线成“井”字形布设。
2.2 导航定位导航定位仪器根据比例尺的不同而不同,导航软件根据需要可以选择Hypack。
3 仪器安装如果DGPS天线数据线长度不够,或拖鱼与DGPS天线之间有偏差,需要通过Hypack软件的Offset来进行改正注意调节保护绳的长度以保证施测过程中数据线不吃力。
4 仪器连接用于导航的DGPS信号,可以直接通过COM1连接至侧扫声纳,如果使用Hypack也可以通过其内存共享的数据输出,由双母口的串口数据线输入。
5 Sonarwiz.MAP软件采集5.1参数设置设置拖鱼连接参数和量程:设置记录文件:设置融合方式:Mosaic Setup:File-〉configure mosaic setting(F10):Add Edit Datum:New:Input Name,and then fill the blank as the following:And then back to Add/Edit coordinate system, set the parameters as the following picture:At the last back to Browse coordinate system, choose the name your just definite,。
侧扫声呐系统技术规格及要求

侧扫声呐系统技术规格及要求侧扫声呐系统技术规格及要求一、主要技术要求和指标:1侧扫声呐系统硬件(1套)1.1侧扫声呐成像显示系统侧扫声呐系统需具备水下声呐3D成像功能,能够获取水下地形的高清视图,能够直观的显示声呐成像数据和3D成像数据,并能够切换原始成像数据和3D成像视图。
侧扫声呐系统支持历史数据回放及声呐成像数据导出。
1.2水下声波发射和接收换能器水下声波发射和接收换能器能够向两侧和底部发送宽角度声波波束,采集成像深度大于60米,测深深度大于250米。
1.3声呐信号示波器侧扫声呐系统需具备NMEA0183接口及NMEA2000接口,能够对声呐数据原始数据进行采集,最大采样率1GSa/s。
2声呐数据管理软件(1套)能够将声呐成像数据从声呐成像显示系统中导出,包括导出水下声呐3D成像数据和平面成像数据。
二、项目实施要求1项目实施周期要求中标方需在合同签订后60日内,完成设备采购、安装、调试,并且配合完成所有“侧扫声呐系统”的联合安装调试。
2项目实施工作要求2.1供货中标人须在不迟于合同签订后的60个工作日内完成所有招标设备到指定地点的供货。
投标人应确保其技术建议以及所提供的设备的完整性、实用性,保证系统及时投入正常运行。
本技术规格书所规定的技术细节是对设计方案的建议,卖方应该保证最终的效果达到规格书上的主要技术要求和指标,若出现因投标人提供的设备不满足要求、不合理,或者其所提供的技术支持和服务不全面,而导致系统无法实现或不能完全实现的状况,达不到规格书规定技术指标时,投标人负相应责任。
2.2安装调试中标单位必须提供安装、配线以及测试和调整,施工过程由专业的调试人员进行安装、检测和排除故障。
2.3验收设备到货后,用户单位与中标单位共同配合有关部门对所有设备进行开箱检查,出现损坏、数量不全或产品不符等问题时,由中标单位负责解决。
根据标书要求对本次所有采购设备的型号、规格、数量、外型、外观、包装及资料、文件(如装箱单、保修单、随箱介质等)进行验收。
侧扫声纳使用操作规定
侧扫声纳使用安全操作规程1.日常维护1.1 作为一种精密的测量仪器,磁力仪应该放在干燥阴凉的仪器房内,以确保仪器的电子不受潮。
1.2 仪器通电前注意电源电压,保证电源电压的正常。
1.3 仪器下水前注意检查各接头的连接,特别是水下探头接头要严格密封。
一定要注意连接在绞车上的接头,防止接头被绞车擦坏,收放电缆时务必断开仪器电源。
2.扫测准备2.1 搜集有关资料。
扫测海区的水深和地貌,障碍物,潮流的流速和流向扫测期间的气象,扫测船吃水深度,扫测船最低速度等。
2.2 设计扫测方案。
依据测区环境和扫测要求确定扫测方法、重叠带宽度、分辨率、船速、拖鱼高度及拖缆长度等;设计测线布设方向和间距;拟订扫测实施要求,资料整理要求。
2.3 检查系统的完整性;在陆上进行电测试,确定各分机的工作是否正常;检查水密部件,确保不漏水;保证侧扫声纳处于正常工作状态。
2.3 扫测实施前应进行静态和动态试验。
静态试验要求声图灰度适中且均匀,声图清晰而无噪声图象。
动态试验要求扫测船以设计方案实施扫测,检查试验设计各参数是否符合实际情况,调试施测参数,使声图灰度适中,海底地貌轮廓清晰。
系统状态符合技术指标要求方可实施扫测。
3.扫测实施3.1 扫测实施方法有两种:粗扫测和精扫测。
对大面积扫测海区,应先进行粗扫测,当发现可疑目标时,再进行精扫测。
精扫测证实目标存在,并可疑在声图上分辨目标类型和性质,位置和高度,最后应用测深仪加密探测,或潜水员下潜作业,以得到更精确的目标信息。
3.1.1 扫要求全覆盖扫测海区。
扫测趟的取向应一致,而且要相互平行;扫测趟的有效作用距离应有重叠带,不能在相邻产生遗漏区域。
当探测海底微地貌时,相邻扫测趟可采用2倍有效作用距离,而无需设计重叠带。
3.1.2 精扫测应根据粗扫测声图上目标图象确定其位置,高度,并确定扫测频率,发射脉宽,有效作用距离,扫测船船速,拖鱼入水深度,再进行扫测。
精扫测取向应尽量平行于目标走向,或于目标走向的舷角小于30或大于150。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
侧扫声呐系统技术规格及要求
一、主要技术要求和指标:
1侧扫声呐系统硬件(1套)
1.1侧扫声呐成像显示系统
侧扫声呐系统需具备水下声呐3D成像功能,能够获取水下地形的高清视图,能够直观的显示声呐成像数据和3D成像数据,并能够切换原始成像数据和3D成像视图。
侧扫声呐系统支持历史数据回放及声呐成像数据导出。
1.2水下声波发射和接收换能器
水下声波发射和接收换能器能够向两侧和底部发送宽角度声波波束,采集成像深度大于60米,测深深度大于250米。
1.3声呐信号示波器
侧扫声呐系统需具备NMEA0183接口及NMEA2000接口,能够对声呐数据原始数据进行采集,最大采样率1GSa/s。
2声呐数据管理软件(1套)
能够将声呐成像数据从声呐成像显示系统中导出,包括导出水下声呐3D成像数据和平面成像数据。
二、项目实施要求
1项目实施周期要求
中标方需在合同签订后60日内,完成设备采购、安装、调试,并且配合完成所有“侧扫声呐系统”的联合安装调试。
2项目实施工作要求
2.1供货
中标人须在不迟于合同签订后的60个工作日内完成所有招标设备到指定地点的供货。
投标人应确保其技术建议以及所提供的设备的完整性、实用性,保证系统及时投入正常运行。
本技术规格书所规定的技术细节是对设计方案的建议,卖方应该保证最终的效果达到规格书上的主要技术要求和指标,若出现因投标人提供的设备不满足要求、不合理,或者其所提供的技术支持和服务不全面,而导致系统无法实现或不能完全实现的状况,达不到规格书规定技术指标时,投标人负相应责任。
2.2安装调试
中标单位必须提供安装、配线以及测试和调整,施工过程由专业的调试人员进行安装、检测和排除故障。
2.3验收
设备到货后,用户单位与中标单位共同配合有关部门对所有设备进行开箱检查,出现损坏、数量不全或产品不符等问题时,由中标单位负责解决。
根据标书要求对本次所有采购设备的型号、规格、数量、外型、外观、包装及资料、文件(如装箱单、保修单、随箱介质等)进行验收。
设备安装完成,由中标单位制定测试方案并经用户确认后,对产品的性能和配置进行测试检查,并形成测试报告,包括负载测试。
2.4验收内容及标准
侧扫声呐系统需具备水下声呐3D成像功能,能够获取水下地形的高清视图,能够直观的显示声呐成像数据和3D成像数据,并能够切换原始成像数据和3D成像视图。
侧扫声呐系统支持历史数据回放及声呐成像数据导出。
水下声波发射和接收换能器能够向两侧和底部发送宽角度声波波束,采集成像深度大于60米,测深深度大于250米。
侧扫声呐系统需具备NMEA0183接口及NMEA2000接口,能够对声呐数据原始数据进行采集,最大采样率1GSa/s。
声呐数据管理软件能够将声呐成像数据从声呐成像显示系统中导出,包括导出水下声呐3D成像数据和平面成像数据。
三、付款条件:
货到付款。
四、售后服务要求
在保修期内,如有产品故障问题,投标方需免费提供上门协助服务。
在保修期结束前,需由投标方工程师和用户代表进行一次全面检查,任何缺陷必须由投标方负责修理,在修理后,投标方应将缺陷原因、修理内容、完成修理及恢复正常的时间和日期等报告给用户。
免费维护期满后,投标方必须继续提供7*24应急响应,费用另行协商。