基于S7-300PLC的小车运动控制系统
毕业设计(论文)-基于PLC的小车运动控制系统
IVT-REJX-50苏州工业园区职业技术学院毕业项目2011 届2011年5月20日项目类别:毕业论文项目名称:基于PLC 的小车运动控制系统专业名称:电子产品质量检测姓 名 :学 号 :班 级:指导教师:IVT-REJX-51苏州工业园区职业技术学院毕业项目任务书(个人表)系部:电子工程系毕业项目类别:毕业论文毕业项目名:基于PLC的小车运动控制系统校内指导教师:职称:工程师类别:专职校外指导教师:职称:工程师类别:兼职学生:专业:电检班级:1、毕业项目的主要任务及目标任务:结合工作实际,实现基于PLC的小车运动控制系统,完成小车运动控制系统得软硬件设计。
目标:完成一篇5000字以上的论文。
2、毕业项目的主要内容论文的主要内容:用plc控制小车的要求;I/O分配表和工作流程;小车运动系统的控制流程和梯形图;调试过程中的问题及解决方式。
要求:(1).采用学院规定的文档格式(2).论文正文层次分明,行文流畅,易懂(3).不得整段抄袭他人文章或技术资料3、主要参考文献(若不需要参考文献,可注明,但不要空白)[1]范次猛. 可编程控制器原理与应用[M].北京:理工大学出版;[2]张桂香.电气控制与PLC应用[M].北京:化学工业出版社;[3]邓则名,邝穗芳等.电器与可编程序控制器应用技术[M].北京;机械工业出版社;[4]曹辉.可编程序控制器系统原理及应用[M].北京:电子工业出版社;[5]戴冠秀.PLC在运料小车自动控制系统中的应用[J]. 工矿自动化6期,2005年;[6]李仁编.电器控制[M].北京:机械工业出版社;[7]郑凤翼.图解PLC控制系统梯形图和语句表[M]. 北京:人民邮电出版社;[8]廖常初.PLC应用技术问答[M].北京:机械工业出版社;[9]刘柏生. PLC编程实用指南[M]. 北京:机械工业出版社;[10]张万忠. 可编程控制器应用技术[M].北京:化学工业出版社;[11]赵华军. PLC 在生产线送料小车控制系统中的应用[J].机电工程技术,第36卷,第三期;[12]郝力文,王子文.车间运输小车的智能控制[J]. 机电工程.2001 年第28 卷增刊;[13]汪晓光,孙晓瑛,王艳丹.可编程控制器原理及应用[M].北京:机械工业出版社.2002.5;[14]张传祥.电气自动控制系统[M].北京:电子工业出版社. 2003;[15]王国庆.现在PLC的发展及其在先进制造技术中的应用[J].机电工程.1997年,第四期;[16]求是科技. PLC应用开发技术与工程实践[M]. 北京:人民邮电出版社. 2005年。
基于S7-300PLC和Wincc的移载车控制系统
石
华 ,王瑞 辉ANG Ru i — h u i ,SHI B o。 ,Y ANG Wa n — r a n
( 1 . 机械科学研究总院 先 进制造技术研究 中心 先进成形技术与装备国家重点实验室 ,北京 1 0 0 0 8 3 ; 2 . 泰安康平纳毛纺织 集团有 限公司 ,泰安 2 7 1 0 0 0 )
作者简介:石华 ( 1 9 8 4一 ),女,工程师 ,本科 ,研究方 向为 电气控制 。
【 7 4 】 第3 6 卷
第1 期
2 0 1 4 — 0 1 ( 下)
、 l
行 , 验 证 了设 备 性 能 稳 定 可 靠 ,也 证 明 了基 于 下 位机P L C和 上 位机 WI NCC的 自动 移 载 车 控 制 系统 是 一 个 可靠 、 高 效 的 系统 ,其 控 制 流 程 与 精 度 达
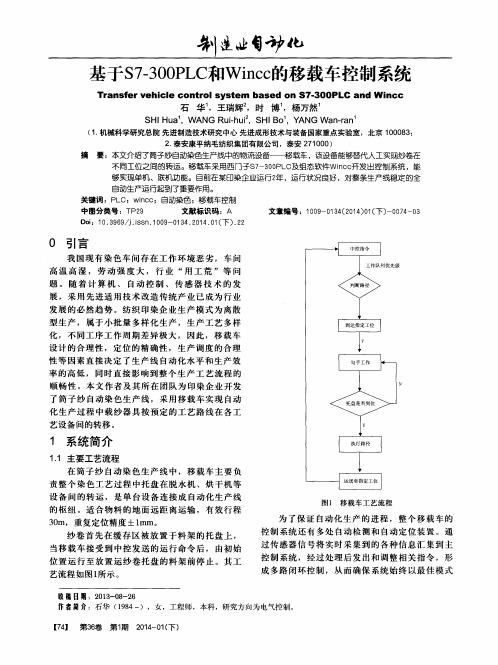
设 计 的 合 理 性 ,定 位 的 精 确 性 ,生 产 调 度 的合 理 性 等 因 素 直 接 决 定 了生 产 线 自动 化 水 平 和 生 产 效 率 的 高 低 , 同 时 直 接 影 响 到 整 个 生 产 工 艺 流程 的
顺 畅 性 。本 文 作 者 及其 所 在 团 队 为 印 染企 业 开 发 了筒 子 纱 自动 染 色 生 产 线 , 采用 移 载 车 实 现 自动
1 生 訇 , t t L
基于 S 7 — 3 0 0 P L C 和Wi n c c 的移载车控制 系统
Tr ans f er v ehi cl e con t r oI s ys t em based on S7- 300PLC an d Wi ncc
0 引言
我 国现 有 染 色 车 间 存 在 工 作 环 境 恶 劣 ,车 间 高 温 高 湿 , 劳 动 强 度 大 , 行 业 “用 工 荒 ” 等 问
基于S7-300PLC的小车运动控制系统
基于S7-300PLC的小车运动控制系统白颖;王致杰;孙丛丛;朱谷雨;刘水【期刊名称】《信息技术》【年(卷),期】2017(000)001【摘要】基于改善现有工业生产运输环节的目的,设计开发了基于PLC (S7-300)的小车运动控制系统,并完成了硬件设计和软件编程.该系统通过PLC编程、直流电动机传动装置、传感检测以及数码管显示装置,实现了对运动小车的自动和手动两种控制方案,能够自动检测出目标小车的位置,完成小车位置的实时故障报警.实际应用表明,该系统具有操作简便、测试准确的特点,达到了设计要求.%This paper based on the purpose of improving the existing industrial production and transportation links,designs a trolley motion control system,which was based on Siemens programmable logic controller(S7-300).And the design also completes the hardware design and software programming.It realizes two kinds of control programs of sports car,including automatic control and manual control,through PLC programming,DC motor drives,sensor detection and digital display devices.The practical application shows that the system has the characteristics of simple operation,accurate test,and reached the design requirements.【总页数】4页(P22-25)【作者】白颖;王致杰;孙丛丛;朱谷雨;刘水【作者单位】上海电机学院电气学院,上海201306;上海电机学院电气学院,上海201306;上海电机学院电气学院,上海201306;上海电机学院电气学院,上海201306;上海电机学院电气学院,上海201306【正文语种】中文【中图分类】TP273+.5【相关文献】1.基于S7-200 PLC小车运动控制系统的设计 [J], 薛俐清;2.基于PLC、变频器与组态王的“运料小车运动控制系统”综合实训课题的研究[J], 胡玲笑3.基于组态王软件的小车运动控制系统设计 [J], 董海兵;姚胜兴4.基于S7-200 PLC小车运动控制系统的设计 [J], 薛俐清5.基于PLC、变频器与组态王的“运料小车运动控制系统”综合实训课题的研究[J], 胡玲笑因版权原因,仅展示原文概要,查看原文内容请购买。
基于PLC的机械小车运料自动控制系统设计毕业设计

本科毕业设计(论文)题目基于PLC的机械小车运料自动控制系统院(系部)专业名称年级班级学生姓名指导教师2013 年 5 月14日年摘要早期的机械运料小车电气控制系统大多为继电器-接触器组成的复杂系统,这种系统存在设计周期长、体积大、成本高等缺点,几乎无数据处理和通信功能,还必须有专人负责操作。
将PLC应用到机械运料小车电气控制系统,可实现机械运料小车的自动化控制,降低系统的运行费用,节省劳力。
PLC机械运料小车电气控制系统具有连线简单、控制速度快,精度高,可靠性和可维护性好,安装、维修和改造方便等优点。
本设计以PLC控制技术为核心,采用德国西门子S7-200的PLC,论述了机械运料小车控制系统的软硬件设计方案及其控制原理,实现了机械运料小车的自动控制。
通过实际应用,说明所设计的控制系统运行可靠,满足了实际需要。
关键词:PLC 机械运料小车自动化控制AbstractMost of the early mechanical the car transporter electrical control system relay - contactor complex system composed of, such a system design cycle, bulky, cost disadvantages, almost no data processing and communications functions, there must also be the person responsible for the operation. PLC application to mechanical car transporter electrical control system can achieve the mechanical car transporter automation control, reduce system operating costs, labor-saving. PLC mechanical car transporter electrical control system has a simple connection, control speed, high precision, reliability and maintainability, easy installation, maintenance and renovation.The design of PLC control technology as the core, with Germany's Siemens S7-200 PLC, discusses the mechanical car transporter control system hardware and software design and its control principle, to achieve a mechanical automatic control of the car transporter. Through the practical application of the design of the control system is reliable, meet the actual needs.Key words:PLC mechanical car transporter automation control目录前言 (1)1.1设计背景及意义 (1)1.2设计取得的成果 (3)2 PLC概述 (4)2.1PLC的产生与定义 (4)2.1.1 PLC的产生 (4)2.1.2 PLC的定义 (4)2.2PLC的发展及趋势 (5)2.3PLC的特点及其功能 (7)2.3.1 PLC的基本特点 (7)2.3.2 PLC的功能 (8)2.3.3 PLC与DCS、工业PC (8)2.4PLC的基本组成及其各部分作用 (9)2.5PLC的工作原理 (11)2.6PLC的工作过程 (12)3 方案设计 (13)3.1方案的比较 (13)3.2系统描述 (14)3.3控制要求 (14)3.4主要电气元件的配置 (15)3.5PLC机型的选择 (17)4 PLC控制系统硬件设计 (19)4.1系统主回路与控制回路的设计 (19)4.1.1硬件设计概述 (19)4.1.2 系统主回路设计 (19)总体电路图见附录1 (20)4.2机械运料小车控制系统的实现原理 (20)4.2PLC的外部接线图 (22)根据机械运料小车的工作原理和I/O地址分配表画出PLC的外部接线图,如下: (22)5 PLC控制系统的软件设计 (24)5.1S7程序设计的基本步骤 (24)5.1控制系统的顺序功能图 (24)5.2控制系统的梯形图 (25)7 STEP7-MICRO/WIN编程软件的应用 (27)结束语 (30)致谢 (32)参考文献 (34)附录: (35)外文资料与中文翻译 (35)前言1.1 设计背景及意义PLC控制系统的应用几乎涵盖了工农业生产和人类生活的各个领域。
《2024年基于S7-300PLC的车门包边机控制系统研究》范文

《基于S7-300PLC的车门包边机控制系统研究》篇一一、引言随着汽车工业的快速发展,车门包边机的自动化控制已成为提升生产效率和产品质量的关键环节。
S7-300 PLC(可编程逻辑控制器)以其强大的数据处理能力和灵活的编程方式,在工业自动化领域得到了广泛应用。
本文将针对基于S7-300 PLC的车门包边机控制系统进行研究,探讨其设计原理、实现方法及优势。
二、系统概述车门包边机控制系统是一个集机械、电气、气动和软件于一体的复杂系统。
该系统通过S7-300 PLC进行控制,实现对车门包边机的精确控制,包括包边速度、压力、位置等参数的调整。
S7-300 PLC具有高性能的运算处理能力,能够满足车门包边机高精度、高效率的作业需求。
三、系统设计1. 硬件设计系统硬件主要包括S7-300 PLC、传感器、执行器、电源等部分。
其中,S7-300 PLC作为核心控制单元,负责接收传感器信号、输出控制指令;传感器用于检测车门包边机的运行状态和参数;执行器根据PLC的指令进行动作,实现车门包边机的精确控制。
2. 软件设计软件设计主要包括PLC程序编写、人机界面开发等部分。
PLC程序采用结构化编程方式,便于维护和升级;人机界面采用友好的操作界面,方便用户进行参数设置和操作。
四、控制策略与实现1. 控制策略车门包边机控制系统采用闭环控制策略,通过传感器实时检测车门包边机的运行状态和参数,将检测结果反馈给PLC,PLC 根据反馈结果调整执行器的动作,实现对车门包边机的精确控制。
2. 实现方法系统实现主要采用PLC编程和人机界面开发技术。
PLC编程采用结构化编程方式,便于程序的调试和维护;人机界面采用友好的操作界面,方便用户进行参数设置和操作。
此外,系统还采用了气动技术,通过气动元件实现车门包边机的动作。
五、系统优势1. 高精度控制:S7-300 PLC具有高性能的运算处理能力,能够实现高精度的控制,提高车门包边机的作业精度和效率。
S7-300在多组移动式架车机控制系统中的应用
S7-300在多组移动式架车机控制系统中的应用摘要:文章介绍了以西门子S7-300系列PLC和ET200系列子站为控制核心的多组移动式架车机同步控制系统。
阐述了PLC的基本控制原理、软硬件组成和多组同步控制系统的控制方案。
关键词:PLC;同步控制系统;多组移动式架车机1课题的提出多组移动式架车机是目前我国城市轨道交通系统各个车辆段中为检修电客车和工程车托起除转向架外的车体及以上部分到一定的高度,便于将车体底部的行走总成部分解体和更换的必不可少的专用检修设备,多组移动式架车机是以4台为一组,多组成套使用的设备。
一般电客车和工程车车体常重达几十吨甚至上百吨,架车作业升程多在1.4~2 m之间,同时架车点距地面最高可达2.2 m。
架车作业过程中,由于每台架车机电机的电气性能不可能完全一致,电客车车体重量分布也不可能绝对平衡,因此,各台架车机的运行速度有快有慢,造成在架升过程中各个架车机的升降高度不可能完全一致,电客车车体有可能产生破坏性的车体变形,甚至当高度差达到一定值时,车体就有倾覆的危险。
因此,在保障作业中各个架车机的同步运行就成为一个非常重要的安全问题。
老式架车机多为单组4台架车机同步升降,其控制系统在硬件方面多沿用单片机作为主要控制器构成控制系统,这样的控制系统虽然造价低,但存在开发周期长,稳定性和可靠性差,工程师和工人现场维护不方便,可替换性差的缺点,容易造成误动作等现象,严重时有可能导致由于设备失灵而产生的设备、车辆及人员安全方面的重大事故;虽然也有用PLC作为主控器的,但对于老式架车机其系统要求较低,只需控制4台架车机的同步升降,控制精度要求较低,系统响应时间较长,操作不灵活等问题。
2工艺要求及参数设置2.1工艺要求中华人民共和国铁道部2000年10月24日颁发了TB/T 1686-2000行业标准。
标准中第3.8.2条中规定:为保证每组架车机安全作业,应同时配置架车机同步控制装置,该装置应具有运行高度显示、超差自动调整、超限自动停机报警等功能。
小车三地运行控制系统程序设计plc
《PLC技术》课程设计题目小车三地运行控制系统程序设计学院:信息科学与工程学院班级:自动化2012级01班学号:201204134013学生姓名:指导教师:程耕国老师二○一五年四月一、设计题目:小车三地运行控制系统程序设计二、设计目的:巩固《PLC技术》课程学过的知识,加强理论与实践的联系。
以西门子S7-300系列PLC为例,通过本课程设计,达到了解硬件设备,熟悉PLC系统设计流程,灵活运用基本指令目的。
三、设计时间:一周四、设计内容及要求:1、设计控制内容:根据设计资料的控制要求,采用西门子S7-300系列PLC来实现小车三地自动运行。
具体要求如下:(1)、小车在A地停两分钟等待装料,然后自动走向B。
如果车不在A地,则需要车先返回A地装料;(2)、小车到B地后停一分钟等待卸料,然后自动走到A;(3)、小车在A地停两分钟等待装料,然后自动走向C,小车在C地停一分钟等待卸料,开始往复运动;(4)、工作过程中若按停止按钮,需要完成一个工作周期后才停止工作。
2、要求:(1)、提交课程设计报告书。
注意:不得抄袭他人的报告(或给他人抄袭),一旦发现,成绩记为零分。
(2)、课程设计报告的内容应该包括以下几个部分:○1设计题目、设计要求以及系统功能需求分析;○2PLC硬件模块选型,主电路以及输入输出电路;○3信号表,程序流程图、梯形图及程序注释;○4对程序进行仿真,调试过程中存在问题的思考(列出主要问题的出错现象、出错原因,解决方法及效果等);○5课程设计小结。
包括课程设计过程中得些学习体会与收获。
五、具体设计(1)需求分析首先,一个系统的完整性必然会有开始和停车按钮,以保证安全性和完整性。
由于在A、B、C三地分别需要触发并且延时,所以需要行程开关以及内部定时器的配合。
并且经过分析,A地应该位于B、C两地之间,因此需要有一个方向标志及电机的正反转来表征小车的状态。
(2)主电路图(3)I/O接线图(4)信号表(5)程序流程图(6)STEP7项目创建(硬件)1 新建一个工程2 保存工程路径3 创建S7-300项目4 摆放机架5 开始摆放模块6 完成后的模块7 硬件创建完以后,保存。
《2024年基于S7-300PLC的车门包边机控制系统研究》范文
《基于S7-300PLC的车门包边机控制系统研究》篇一一、引言随着汽车制造技术的不断发展,车门包边机的自动化控制成为了汽车制造领域中不可或缺的一环。
S7-300 PLC(可编程逻辑控制器)以其卓越的稳定性和灵活的编程能力,在工业自动化控制领域得到了广泛应用。
本文旨在研究基于S7-300 PLC的车门包边机控制系统,以提高车门包边机的自动化程度和效率。
二、系统概述车门包边机控制系统是一个集机械、电气、气动和PLC控制于一体的复杂系统。
该系统通过S7-300 PLC实现对车门包边机的精确控制,包括包边速度、压力、温度等参数的调节。
此外,系统还具有故障诊断、报警提示和自动停机等功能,以确保生产过程的安全性和稳定性。
三、系统硬件设计1. PLC选择:选用S7-300 PLC作为核心控制器,其强大的处理能力和丰富的I/O接口能够满足车门包边机控制系统的需求。
2. 传感器与执行器:系统采用多种传感器(如位置传感器、压力传感器、温度传感器等)实时监测车门包边机的运行状态,同时通过执行器(如电机、气缸等)实现对车门包边机的精确控制。
3. 通信接口:系统具备多种通信接口,如以太网、USB等,方便与上位机进行数据传输和远程控制。
四、系统软件设计1. 编程语言:采用STEP7编程软件进行程序设计,支持多种编程语言,如梯形图、指令表等。
2. 控制算法:根据车门包边机的工艺要求,设计合适的控制算法,如PID控制、模糊控制等,以实现对包边速度、压力、温度等参数的精确控制。
3. 界面设计:设计友好的人机交互界面,方便操作人员对车门包边机进行控制和监控。
界面应具备实时显示运行状态、参数设置、故障诊断等功能。
五、系统实现与测试1. 系统实现:根据硬件和软件设计,搭建车门包边机控制系统,并进行调试和优化。
2. 测试方法:通过实际生产过程中的测试,验证系统的性能和稳定性。
测试内容包括包边速度、压力、温度的调节范围和精度,以及系统的故障诊断和报警提示功能等。
s7-300运动控制系统操作说明
运动控制系统操作说明上海西门子工业自动化有限公司目录一.安装软件权 (3)二.新建工程 (4)三.硬件配置 (6)3.1.插入S7-300主站 (6)3.2.插入ET200S从站(PROFINET IM151-3PN) (11)3.3.插入X208以太网路由器(PROFINET SCALANCE X208) (13)3.4.插入ET200S从站(PROFIBUS IM151-1) (14)3.5.插入变频器MM440从站(PROFIBUS MM440) (16)3.6.插入DP/ASI从站(DP/AS-i Link 20E) (17)3.7.插入S7-200从站(EM 277)* (18)3.8.下载硬件配置 (20)四.PROFINET硬件地址配置 (21)五.下载配置及程序 (27)六.PROFIBUS硬件地址设定 (29)6.1.IM151-1(PROFIBUS ET200S)硬件地址设定 (29)6.2.MM440(带PROFIBUS 面板的变频器)硬件地址设定及快速调试 (30)6.3.ASI(DP/ASI LINK)硬件地址设定 (36)一.安装软件权(请先安装SOFTWARE FOR TRAINING EDITION 2004(STEP 7 PROF EDITION 2004),安装过程此处不再详细叙述,其他版本的STEP 7类似。
)导入您软件配套软盘上的加密文件-授权。
打开开始菜单-ALL PROGRAMS-SIMATIC-LICENSE MANAGEMENT- Automation License Manager将软盘上的授权导入您的C盘根目录下。
(切记:在重装操作系统或格式化硬盘前,一定要将此授权导回软盘中,以免发生授权丢失。
)二.新建工程打开开始菜单-ALL PROGRAMS-SIMATIC- SIMATIC Manager您可以用向导新建一个项目,也可以取消此向导,按文后的说明一步步手动新建项目。
基于S7—200 PLC小车运动控制系统的设计

基于S7—200 PLC小车运动控制系统的设计摘要:可编程控制器(PLC)以其可靠性高、速度快、处理能力强、电磁兼容性良好等特点,受到越来越广泛的应用,因此,用可编程控制器代替传统的继电器控制小车运动系统成为社会发展的一个方向。
文章通过用可编程控制器(S7-200 PLC)控制小车运动模型工作,详细叙述了小车运动PLC控制系统的设计方法,主要介绍了小车运动PLC控制系统的设计要求,列出了具体的输入输出地址,并给出了系统梯形图的设计。
该PLC控制程序在对小车运动的模型控制中取得了良好的效果,完全满足本系统提出的控制要求。
关键词:S7-200 PLC;小车运动;程序1 小车运动控制系统实训模型介绍1.1 小车运动控制系统概述本小车运动控制系统实训教学模型(如图1所示)由运动小车、同步带轮传动机构、直流电机、光电传感器、电感式传感器、电容式传感器、行程开关等组成,通过传感检测、PLC编程,实现运动距离测量、传动控制、键值优化比较行走控制、定向控制、定位控制、点动控制、位置显示控制等,能实现小车的精确定位。
该系统外观精美,体积紧凑,重量轻,能满足大中专院校可编程控制器技术的教学、课程设计和毕业设计。
1.2 系统配置小车运动控制系统实训教学模型如图1所示。
①安装底板:用于安装各种执行器及控制器的支撑体。
②导轨:用于固定同步带/轮,牵曳滑块小车运动及定义滑块小车的运行轨迹。
③小车滑块(如图2所示):整套系统的被控对象。
④直流减速电机:整套系统的执行机构,用于带动被控对象小车。
⑤操作盒(如图3所示):安装有各种控制输入及输出显示机构。
⑥传感器机构:安装有各种传感器,例如电感式、电容式、光电式等,用于检测控制对象的位置信息。
2 小车运动控制系统的设计要求2.1 控制要求①系统启动,小车复位运行至位置4处。
②当选择“手动运行”时,系统调用“手动子程序”,进入手动运行状态,小车按手动方式运行。
控制要求如下:系统启动,进入手动状态,点动“1、2、3、4”定位按钮时,小车能运动至指定位置。
小车自动运行控制系统(plck课程设计)

第一章概述1.1 设计背景及意义本文介绍了一种基于西门子PLC控制的生产流水线自动控制小车系统设计方案。
将PLC运用到小车自动控制系统,可实现小车的全自动控制,降低系统的运行费用。
PLC小车自动控制系统具有连线简单控制速度快,精度高,可靠性和可维护性好,维修和改造方便等优点。
利用PLC 控制技术,可实现小车相关运动,小车在一个周期内的运动由4段组成。
设小车最初在左端,当按下启动按钮,则小车自动循环地工作,若按下停止按钮,则小车完成本次循环工作后,停止在最初位置。
其运动路线示意图如下图1-1所示。
如图1-1 小车运动路线示意图第二章硬件设计2.1 主电路图如图2-1为小车循环控制的主电路原理图。
该电路图利用两个接触器的主触点KM1、KM2分别接至电机的三相电源进线中,其中相对电源的任意两相对调,即可实现电机的正反转,也可达到小车左右运行的目的。
假设接通KM1为正转(小车右行),则接通KM2为反转(小车左行)。
图2-1小车循环控制的主电路原理2.2 I/O地址分配如表2-1为小车循环运动PLC控制的I/O分配表。
在运行过程中,这些I/O口分别起到了控制各阶段的输入和输出的作用,并且也使小车的控制过程更清晰明了,动作与结果显示更加方便直接。
表2-12.3I/O接线图如图2-2为小车循环运动PLC控制的I/O接线图。
在进行调试过程时,在PLC模块上,当I0.0有输入信号,即按下SQ1;当I0.1有输入信号,也即按下SQ2,以此类推,I/O接线图就是把实际的开关信号变成调试时的输入信号。
同理,输出信号也是利用PLC模块把小车的实际运动用Q0.0、Q0.1的状态表现出来。
图2-2小车循环运动PLC控制的I/O接线图2.4元件列表如表2-2为小车循环运动PLC控制的元件列表。
在本次设计中就是利用这些元件,用若干导线连接起来组成了我们需要的原理图、I/O接线图。
第三章软件设计3.1 程序流程图如图3-1为小车循环运动PLC控制的程序流程图。
送料小车自动往返的PLC控制
3
输入输出接口
Company Logo
内部电路
R1
I0.0
5 .6 k S1
D1
Q1
R2
1k
D2
1M
M
DC
L+
2 4v
3
输入输出接口
Company Logo
❖ 3. 热电偶、热电阻扩展模块
❖ 4. PROFIBUS-DP通信模块
5.5 S7-200 PLC内部器件
Company Logo
31
PLC数据类型
2
编址方式
3
寻址方式
4
元件功能及地址分配
31
PLC数据类型
Company Logo
❖ 最基本的存储单位是位(bit),8位二进制数组成1个 字节(Byte),其中的第0位为最低位(LSB),第7位为 最高位(MSB)。两个字节(16位)组成1个字(Word), 两个字(32位)组成1个双字(Double word)。把位、 字节、字和双字占用的连续位数称为长度。
2
PLC基本组成
Company Logo
❖ 可编程控制器主要由CPU、存储器、基本I/O接口电路、 外设接口、编程装置、电源等组成
输入 信号
输
输
入
出
接
CPU
接
口
存储器
口
电
单元
电
路
路
编程装置
输出 设备
2
PLC基本组成
Company Logo
S7-300小车控制系统(S7与PLC通信连接组态) 教学设计

分 2.4.2小车控制系统
1.控制制系统简介
图2-43是小车控制系统的示意图与外部接线图。
按下右行起动按钮SB2或左行起动按钮SB3后,要求
小车在左限位开关SQ1和右限位开关SQ2之间不停地循环往返,直到按下停止按钮SB1。
2.仿真实验要求
用“新建项目”向导生成一个名为“小车控制1”的项目目(见随书光盘中的同名例程),CPU可以选用任意的型号。
打开OB1,输入图2-44所示示的梯形图程序。
打开PLCSIM,将用户程序和系统数据下载到仿真PLC。
将仿真PLC切换到RUN或RUN-P模式。
生成视图对象IB0O和QB4(见图2-36),用用PLCSIM调试程序。
单击10.0~110.5对应的小方框,生成各种输入信号,通过观察Q4.0和Q4.1对应的小方框,检查程序运行的情况。
在
引导下,结合
识
决
题,并做到举一反三。
动手实践
如果选中“设置PG/PC接口”对话框中间的通信接口列
表的“PCAC( PROFIBUS)”,适配器应连接到CPU的DP接口。
更改后单击“确定”按钮,退出对话框后新的设置生效。
S7-300型PLC在立式锥形辊穿孔机顶杆小车上的应用
Abs r c : T e e e ti a o t o ft e t r s l c s r g r e s s r t a o n u i g n r la d h g — ta t h l c rc lc n r lo h h u tb o k i e a d d a o c i c lf re s rn o ma n i h i
Appl a i n o -3 0 PL t s o k i t fS7 0 C o Th u tBl c c o r o fVeri al t c Con y e Pi r e eT p ec r
Ch n C a g e h n
(Pe iinSe l iePa t as a o n te C . t. h n h i2 0 4 ,C ia) rcso te Pp ln,B oh nI na dSe l o,Ld,S a g a 0 9 0 hn r
在立 式 锥形 辊 穿孔机 顶 杆小 车 电气控 制系 统 中 的应
用情 况 。
穿孔机 的 2个轧辊上下 立式布置 ,由 2台 1 0 0 5
k W、5 01 0 m n的电机单独传 动 ,导板左右 0 / 0 0r i / 水平 布置 。上 、下 轧辊设 计有 辗轧 角 ,可在 一定 范
e iin yo eain o evr c l o etp ire C P rp r Decie eeaeteman ap cso e fce c p rt f h et a c n y epecr( T )po e. sr dh r r h i se t f h f o t i b t
Ke r s P C; CT h u tb o k; El c r c c n r ls se y wo d : L P t r s l c e t i o to y t m; Ha d a e c n i u a i n; P r me e e t g r w r o fg r to a a t rs ti ; n
小车往复运动PLC自动控制说明书
小车往复运动PLC自动控制说明书可编程控制器是一种为工业机械控制所设计的专用计算机,在各种自动控制系统中有着广泛的应用,它是在继电器控制和计算机控制基础上开发的产品,逐渐发展成为以微处理器为核心,把自动化技术、计算机技术,通信技术融为一体的新型工业自动控制装置。
早期的可编程控制器在功能上只能进行逻辑控制,因而称为可编程程序逻辑控制器(Programmable Logic Controller)简称PLC。
随着技术的发展,其控制功能不断增强,可编程程序控制器还可以进行算术运算,模拟量控制、顺序控制、定时、计数等,并通过数字,模拟的输入、输出控制各种类型的机械生产过程。
长期以来,PLC及其网络控制系统始终战斗在工业自动化控制行业的主战场,其提供的安全和完善的解决方案,为各种各样的自动化设备提供了非常可靠的控制应用,在电力、冶金、化工、机械等行业发挥了重大作用,被公认为现代工业自动化三大支柱之一。
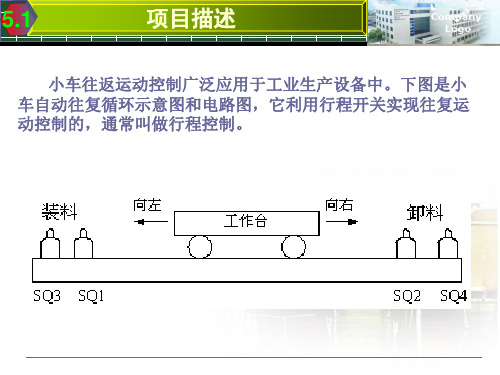
PLC广泛用于自动化生产线上,有些生产机械工作台需要按一定顺序实现自动往返运动,有还要求某些位置有一定时间停留,以满足生产工艺要求。
用PLC程序实现运料小车自动往返顺序控制,具有程序设计简易、方便、可靠性高等特点,程序设计方法多样,便于不同层次设计人员理解和掌握。
此次的课程设计我们设计的是小车往复运动PLC自动控制。
用型号为西门子公司S7系列的S7-300的PLC实现小车在运输过程中装料、卸料的往复运动过程。
通过I/O地址的分配,实现PLC与控制路线的接口连接。
关键词:可编程控制器(PLC)小车往复运动 S7系列S7-300第一章方案概述 (4)1.1 小车往复运动PLC自动控制设计 (4)1.2 往复运动的实现要求 (4)1.3 设计系统要求 (4)第二章原理控制线路图 (6)2.2 PLC I/O接线原理图 (7)2.3 顺序功能图 (8)2.4控制程序梯形图 (9)第三章系统仿真与运行 (12)3.1 组态 (12)3.2 调用函数 (13)3.3完成仿真 (14)结束语 (14)参考文献 (15)附录 (16)第一章方案概述该方案的目的是实现运料小车的往复运动,在运送过程中,根据站点的不同进行往复,是按照顺序进行运送的设计,并通过对电机的控制实现一定的循环。
基于PLC控制的小车运动控制系统的毕业设计论文

小车运动控制系统的研究摘要:小车运动控制Ⅰ型实物教学模型的机械结构由丝杆、滑杆等机械部件组成;电气方面有直流减速电机、传感器、开关电源等电子器件组成;可编程控制器可采用目前市面上比较流行的各类PLC,如西门子、三菱或欧姆龙等。
本论文采用的是欧姆龙的PLC。
该模型是将PLC技术,位置控制技术、机械传动等有机结合成一体的教学仪器。
本文详细介绍了小车运动控制系统的硬件电路的设计与实现。
并给出详细的电路连接图。
对欧姆龙PLC,直流电机以及接近开关传感器的工作原理和在本实验中直流电机,传感器所起的作用做了详细的介绍。
重点就如何用梯形图实现小车的左行与右行,停止以及位置的显示,如何报警进行研究。
对现场总线和工业现场控制进行了简单的介绍。
用PLC继电器逻辑实现小车的智能控制具有深远的现实意义,可以将此技术广泛应用于车间物料的传送。
其具有极为方便的操作性能,较高运行效率和运行可靠性。
关键词:直流电机;接近开关;欧姆龙PLC;机械传动;The study for vehicle motion control systemAbstract: The mechanical structure of the teaching model which is called the type ⅠMotion Control Vehicle is made up of screw, slider and other mechanical components; There are DC geared motors, sensors, electronic devices, such as switching power supply components in electrical part; The PLC can be the currently popular types in the market, such as Siemens, Mitsubishi or Omron. In this thesis, the Omron PLC is used. The model is the teaching equipment which is the organic integration made up of PLC technology, the location of control technology, mechanical transmission.This paper describes the design and implementation of the hardware circuit in car motion control system. And a detailed connection diagram of the circuit is given. For Omron PLC, the working principle of DC motors and the proximity switch sensor switch, as well as the actions of DC motor and sensors in this experiment are presented in detail. Which are focused that how to achieve the left-right running, stop as well as the location display of car by ladder diagram, and how to give an alarm. CAN-Bus and control system in industrial site are also introduced in brief.There is far-reaching practical significance using PLC relay to logically achieve the intelligent control of car, and this technology can be widely used in the transmission of workshop materials. It has very convenient interoperability, and can improve the operating efficiency and operating reliability.Keywords: DC motor; proximity switch; Omron PLC; mechanical transmission目录第一章绪论 (1)1.1 课题在理论和实际应用方面的价值 (1)1.2 主要研究内容 (2)第二章智能小车的研究现状 (3)2.1 国内智能小车的研究现状 (3)2.2 国外智能小车的研究现状 (4)第三章小车运动控制系统的关键技术 (6)3.1 PLC的选择及工作原理 (6)3.2 直流电机与接近开关 (10)3.2.1 直流电机的基本工作原理 (10)3.2.2 接近开关的工作原理: (14)3.3 机械传动原理和现场总线技术 (15)3.3.1 机械传动原理 (15)3.3.2 现场总线技术 (16)第四章小车运动控制系统的设计 (19)4.1 硬件电路的设计 (19)4.1.1 实验器材 (19)4.1.3 控制要求 (23)4.1.4 实验步骤 (24)4.2 梯形图的设计 (24)结论 (32)致谢 (33)参考文献 (34)第一章绪论1.1 课题在理论和实际应用方面的价值小车运动控制系统,也就是最简单的轮式机器人,最适合在那些人类无法工作的环境中工作,它们已在许多工业部门获得广泛应用。
《基于PLC的皮带卸料小车智能控制系统设计》范文
《基于PLC的皮带卸料小车智能控制系统设计》篇一一、引言随着工业自动化程度的不断提高,智能控制系统在生产线上扮演着越来越重要的角色。
其中,基于PLC(可编程逻辑控制器)的皮带卸料小车智能控制系统是一种常见且有效的解决方案。
该系统通过精确控制皮带卸料小车的运动,提高了生产效率,降低了人工操作成本,并确保了生产安全。
本文将详细介绍基于PLC 的皮带卸料小车智能控制系统的设计。
二、系统设计目标本系统设计的主要目标是实现皮带卸料小车的自动化、智能化控制。
具体包括:1. 提高生产效率:通过精确控制小车的运动,实现快速、准确的物料卸载。
2. 降低人工成本:减少人工操作,降低劳动力成本。
3. 确保生产安全:通过智能控制系统,避免因人为操作失误导致的安全事故。
4. 适应性强:系统应能适应不同生产环境和需求,具有较好的扩展性和灵活性。
三、系统组成基于PLC的皮带卸料小车智能控制系统主要由以下几个部分组成:1. PLC控制器:作为系统的核心,负责接收传感器信号、执行控制算法、输出控制指令。
2. 传感器系统:包括位置传感器、速度传感器、压力传感器等,用于实时监测小车的位置、速度、负载等状态。
3. 执行机构:包括电机、减速器、刹车装置等,根据PLC控制器的指令,驱动小车进行运动。
4. 人机交互界面:用于显示系统状态、设置参数、进行操作等。
5. 通信模块:实现与上位机或其它设备的通信,便于系统管理和监控。
四、系统工作原理系统工作时,首先通过传感器实时监测小车的状态。
当需要卸载物料时,PLC控制器根据预设的算法和传感器信号,输出控制指令给执行机构,驱动小车进行运动。
同时,人机交互界面显示系统状态和相关信息,方便操作人员进行监控和调整。
此外,系统还具有自诊断功能,当出现故障时,能及时报警并记录故障信息,便于维护和检修。
五、控制系统设计1. 硬件设计:根据系统需求,选择合适的PLC控制器、传感器、执行机构等硬件设备,并设计合理的电路连接和布局。
第6章S7-300PLC指令系统及编程(1).
图6-24 两个字间的 AW指令的操作
例2 使用32位常数异或XOD指令的示例。该程序实现了累加器与
指令中给出的32位常数的异或逻辑运算。
L MD10
//把存储区双字MD10的内容写入累加器1
XOD DW#16#ABCD_1978 //把累加器1的内容与DW#16#ABCD_1978
按位进行异或逻辑运算,结果放在累加器1中
一个正跳沿,Q4.0便反转一次。因此只要设计一个反转程序,每测 得一个正跳沿则进行一次反转,没有正跳沿则不执行反转。具体程 序如图5-21所示(用了跳转指令)。
图6-21 二分频器程序之二
4.往复运动小车控制程序的编写 一小车由电动机拖动,启动后小车自动前进,至指定位置又自动
退回到起始位置,然后又前进,如此反复运行直至命令停止。根据 上述控制要求对I/O点分配如下。小车控制程序如图5-22所示。
STL L MW10 L MW20
AW
T MW12
//把存储字MW10的内容写入累加器1低字中
//把存储字MW20的内容写入累加器1低字中,累加器1原内 容移至累加器2
//累加器1、2低字内容逐位进行“与”逻辑运算,结果存放 在累加器1低字中
//把累加器1低字中内容传送至存储区MW12中
设MW10、MW20的存储内容如图6-24所示,按位进行与运算后, 存入MW12的内容亦示于图6-24中。
T MD14
//把累加器1中内容传送至存储区双字MD14
中设MD10的存储内容如图5-25所示,与异或XOD指令中常数按位进
行异或运算后,传入存储双字MD14的内容亦示于图5-25中。
图5-25 32位常数XOD指令的操作
(二)字逻辑梯形图方块指令 上述字逻辑语句表指令都有对应的梯形图方块指令,梯形图方块
S7-300 PLC第7章 PLC控制系统设计
(6)核算机架数
总模块数=AI(9)﹢AO(3)﹢DI(2)﹢DO(1)=15 块。
每个机架最多可插8个模块,所以需要一个扩 展机架。由于只有一个扩展机架选择经济性比 较好的IM365接口扩展模块。因为每个接口模 块都要从总线电源消耗一定电流,所以必须核 算总线接口带载能力。
根据以上要求并结合本项目模块数量,主机架 放置八块AI模块,扩展机架放置一块AI模块、 三块AO模块、两块DI模块、一块DO模块。
现场施工。主要内容有: 1)设计控制柜和操作台等部分的电器布置图及安装接
线图。 2)设计系统各部分之间的电气互连图。 3)根据施工图纸进行现场接线,并进行详细检查。 (6)联机调试 联机调试是将通过模拟调试的程序进一步进行在线统调。 (7) 整理和编写技术文件 技术文件包括设计说明书、硬件原理图、安装接线图、
1.控制系统设计原则
PLC控制系统设计的原则一般有下面几个方面: (1)最大限度满足被控设备或生产过程的控制要求 最大限度地满足被控对象的控制要求,它是设计控制系
统的首要前提。 (2) 在满足控制要求的前提下,力求系统简单、经济,
操作方便 一个新的控制工程固然能提高产品的质量,提高产品的
电气元件明细表、PLC程序及使用说明书等。
7.2 PLC应用系统的硬件设计
7.2.1 PLC选型与容量估算 1. PLC的选型 (1)性能与任务相适应 ( 2)PLC的处理速度应满足实时控制的要
求 (3)PLC应用系统结构合理、机型系列应
统一 (4)在线编程和离线编程的选择
40针接线端子;6ES7 392—1AM00—0AA0, 14个;
480mm导轨(机架):6ES7 390—1AE80— 0AA0,2个
基于s7-200plc小车定位系统课程设计
基于s7-200plc小车定位系统课程设计1. 介绍本文档描述了基于S7-200PLC的小车定位系统课程设计。
在该课程设计中,我们将利用S7-200PLC控制器来实现一个移动小车的定位功能。
通过该设计,学生可以学习PLC编程和控制算法,并将其应用于实际的小车定位问题中。
2. 设计目标设计的目标是实现一个可靠、精确和高效的小车定位系统。
通过该系统,我们可以确定小车在特定区域内的位置,以及它的运动轨迹。
为了实现这个目标,我们需要考虑以下几个方面:•使用PLC来控制小车的运动,以及获取相关的传感器数据。
•利用传感器数据计算小车的位置和运动轨迹。
•实现一个可视化界面,用于监视和控制小车的定位系统。
3. 系统组成3.1 小车控制部分小车控制部分包括以下几个组件:•S7-200PLC控制器:用于控制小车的运动和获取传感器数据。
•电机驱动器:通过PLC控制电机的运动,以实现小车的移动。
•传感器:用于获取小车的位置和姿态信息,如编码器、陀螺仪等。
3.2 数据处理部分数据处理部分负责处理传感器数据,并计算小车的位置和运动轨迹。
它包括以下几个模块:•数据采集模块:负责从传感器读取数据,并传输给PLC控制器。
•数据处理模块:将传感器数据进行处理,计算小车的位置和姿态信息。
•数据存储模块:将处理后的数据保存到存储设备中,以供后续使用。
3.3 可视化界面部分可视化界面部分提供了一个图形界面,用于监视和控制小车的定位系统。
它包括以下几个组件:•人机界面:用户可以通过该界面查看小车的位置和运动轨迹,并进行相应的控制操作。
•数据显示模块:显示小车的位置和运动轨迹的图表等信息。
•操作控制模块:用户可以通过该模块对小车的运动进行控制,如启动、停止等操作。
4. 实施步骤要完成基于S7-200PLC的小车定位系统课程设计,可以按照以下步骤进行:1.确定设计的具体要求和目标。
2.设计小车的硬件系统,包括电机、传感器等。
3.编写PLC程序,实现小车的运动控制和传感器数据的读取。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
warning
0 引言
“运 动 控 制 系 统 ”这 一 技 术 术 语 在 近 几 年 使 用 非 常 频 繁 ,它 所 研 究 的 是 机 械 在 运 动 过 程 中 有 关 控 制方面的一些理论和技术,内容涉及到动力驱动、运 动 参 数 的 检 测 (传 感 检 测 技 术 )以 及 力 学 等 方 面 [|]。
(上海电机学院电气学院,上 海 201306)
摘 要 :基 于 改 善 现 有 工 业 生 产 运 输 环 节 的 目 的 ,设 计 开 发 了 基 于 PLC ( S7-300) 的 小 车 运 动 控 制 系 统 ,并 完 成 了 硬 件 设 计 和 软 件 编 程 。该 系 统 通 过 P LC 编 程 、 直 流 电 动 机 传 动 装 置 、传 感 检 测以及数码管显示装置,实 现 了 对 运 动 小 车 的 自 动 和 手 动 两 种 控 制 方 案 ,能够自动检测出目标 小 车 的 位 置 ,完 成 小 车 位 置 的 实 时 故 障 报 警 。 实 际 应 用 表 明 ,该 系 统 具 有 操 作 简 便 、 测 试 准 确 的 特 点 ,达 到 了 设 计 要 求 。 关键词:运动控制系统;PLCS7 -300;传感检测;故障报警
收 稿 日 期 :2015 - 1 2 - 0 3 基 金 项 目 :国 家 自 然 科 学 基 金 项 目 (11304200);上 海 市 自 然 科 学 基
金 项 目 (15ZK1417300,15ZK1417200);上 海 市 教 委 创 新 基 金 项 目 (14YZ157,15ZZ106);上 海 市 闵 行 区 科 技 项 目 (2014MH166) 作 者 简 介 :白 颖 ( 1992 - ) ,女 ,硕 士 在 读 ,研 究 方 向 为 智 能 电 网 。
微 机 技 术 的 发 展 ,电 力 电 子 技 术 的 进 步 以 及 一 些 新 型 控 制 策 略 的 出 现 ,正 在 改 变 着 运 动 控 制 系 统 的现状。运动控制系统能够实现机械运动精确的速 度 控 制 和 位 置 控 制 ,还 能 对 被 控 对 象 的 一 些 机 械 量 进 行 综 合 控 制 ,这 种 控 制 通 常 发 生 在 复 杂 的 环 境 中 , 它 可 以 使 机 械 完 成 预 期 的 运 动 ,而 这 些 运 动 可 以 是 指 定 的 控 制 方 案 和 指 令 [2]。运 动 控 制 系 统 现 在 已 然 成 为 了 现 代 工 业 发 展 中 非 常 重 要 的 一 部 分 ,随着
自 动 检 测 出 目 标 小 车 的 位 置 ;结 合 P L C 控制与数 1 . 1 小车运动控制系统能够实现自动/ 手动的两种
Abstract: This paper based on the purpose ol improving the existing industrial production and
transportation lin k s ,designs a trolley motion control system,which was based on Siemens programmable logic controller (S7 -300). And the design also completes the hardware design and software programming. It realizes two kinds ol control programs ol sports car,including automatic control and manual control, through PLC programming,DC motor drives,sensor detection and digital display devices. The practical application shows that the system has the characteristics ol simple operation,accurate test,and reached the design requirements.
信息疼术
文 章 编 号 =1009 -2552 (2017)01 -0022 -04
D O I :10. 13274/ki.hdzj.2017. 01. 006
2 0 1 7 年第1期
基 于 S7-300PLC 的 小 车 运 动 控 制 系 统
白 颖 ,王 致 杰 ,孙 丛 丛 ,朱 谷 雨 ,刘 水
— 22 —
各 个 领 域 科 技 的 发 展 ,人 们 也 对 运 动 控 制 系 统 提 出 了更高的要求,尤 其 是 运行时的准确性、平 稳 性 、高 效 性 、高速性等一系列的性能都有了更严格的衡量 标准。
本 文 结 合 运 动 控 制 系 统 的 相 关 理 论 ,设 计 了 基 于 PLC(S7-300)的小车运动控制系统,通过硬件设 计 和 软 件 编 程 ,实 现 了 对 运 动 小 车 的 自 动 和 手 动 两 种 控 制 方 案 ;同 时 ,通 过 运 用 传 感 器 技 术 ,系统能够
中图分类号A:tTrPo2l7l3e+y.5mo文tio献n标c识o码n:trAol system based on S -7 3 0 0 PLC
BAI Ying, WANG Zhi-jie, SUN Cong-cong, ZHU Gu-yu, LIU Shui
(S ch o o l o f E lectrica l E n g in e e r in g ,S h a n g h a i D ia n ji U n iv e r sity ,S h a n g h a i 201306,C h in a )