基于单片机的倾角传感器设计
基于STC12C5410AD单片机的倾角测试系统方案设计书
摘要本文详细介绍了一种利用加速度传感器、转换器、单片机实现高精度倾角测量的方法。
给出了利用加速度传感器测量倾角的原理提出了整体设计方案。
实验证明该系统工作稳定可靠并对角度传感器进行了研究;分析了不同角度传感器的特性及应用特点。
研究了磁敏角度传感器在拉线式位移传感器的设计与应用,倾角传感器的原理、特点。
结果表明角度传感器具有无触点、高灵敏度、接近无限转动寿命、无噪声、高重复性、高频响应特性好等特点,且广泛应用于航天、航空、国防、科技和工农业生产等各个领域中。
关键词:STC12单片机。
加速度传感器。
角度测量\AbstractThe angle sensor is studied。
analyzes the characteristics and application of the characteristics of different angle sensor,and the magnetic angle sensor in the design and application of Guyed displacement sensor, principle, characteristics of the inclination sensor. The results show that the angle sensor has no contact, high sensitivity, close to life, no noise, rotating infinitely high repeatability, high frequency response characteristic and so on, which is widely used in aerospace, aviation, national defense, science and technology and the production of industry and agriculture and other fields.Key words: STC12 MCU。
基于单片机的一种新型角度传感器的设计
角度 传感 器 广 泛应 用 于工 程 与农 用 机 械 、 仪 器仪 表 、 土 木工程 、 船舶 、 航 空航 天 、 工 业 自动化 、 卫 星 天线 定 位 、 平 台运 转监控 、 地质勘 探 、 四 轮定 位 系 统等 领 域 。其 输 出通 常 分 为 数字 量输 出和模 拟量 输 出 , 数字 量方 式 通过 2 3 2 、 4 8 5、 1 T r L等 方式 以 B C D码 输 出 , 模 拟量输 出电流 或者 电压值 , 根 据行 业 标准 , 默认 电压方式 是 一 9 0度 对应 0 V, +9 0度对 应 5 V, 中间 状态 角度 与 电压 呈 线 性 关 系 ; 默 认 电 流方 式 是 一9 0度 对 应
2 0 1 7年 5月 第2 0卷 第 9期
中 国 管 理 信 息 化
Ch i n a Ma n a g e me n t I n f o r ma t i o n i z a t i o n
Ma y, 2 01 7
Vo 1 . 20. No . 9
基 于 单 片 机 的一 种新 型 角 度传 感 器 的设 计
传 感器 芯片采 用 A D X L 3 4 5芯 片 , 它 可 以测 量 与重 力 方 向夹 角 , 从而确 定 物体 偏 转 的 角度 。不 同角 度下 , 传感 器 芯
蕾 蛊
量
零点位置输出 电流 ( 1 2 ma)
片引脚 输 出不 同的 电压 值 , 单 片机 引脚将 这些 电压值 采集 后 转化 为数字 值 , 即可得传感 器 当前 的角 度情况 。
本 设计 的核 心部 分 是 模 拟 量 输 出模 块, 主 要 通 过 AD 5 4 1 2芯片 实现 , 该 芯 片 是低 成本 、 精密、 完全集成 、 1 2 / 1 6
单片机倾角测试系统设计
数据存储和传输步骤应将处理后 的数据存储到存储器中,并通过 串口或其他通信方式发送出去。
数据采集与处理
01
02
03
04
数据采集应使用合适的传感器 ,如加速度计或陀螺仪,来获
取物体的倾角信息。
数据处理应对采集到的原始数 据进行滤波、去噪等处理,以
获得更准确的数据。
滤波算法可根据实际情况选择 ,如滑动平均滤波、中值滤波
系统优化建议
硬件优化
根据测试结果,优化传感器的设计,提高其精度和稳定性。
软件优化
改进数据处理算法,减少误差和提高计算速度。
系统集成优化
优化系统整体结构,提高测试效率。
06
应用前景与发展趋势
应用领域与优势
工业控制
单片机倾角测试系统在工业控制领域具有广泛应用,如自动化生产线 、机器人等,能够实时监测设备的倾斜角度,保证稳定运行。
系统测试与优化
测试环境与设备
测试环境
为保证测试结果的准确性,测试环境 应保持稳定,避免外界干扰。
测试设备
需要使用高精度的传感器、数据采集 器和单片机开发板等设备。
测试步骤与方法
校准
在开始测试前,需要对 传感器进行校准,以确 保测试结果的准确性。
数据采集
通过单片机开发板采集 传感器数据,并记录下
精度
根据测试需求选择具有合适精度的传感器,以确 保测试结果的准确性。
尺寸与重量
考虑传感器尺寸和重量,以便于安装和集成到测 试系统中。
传感器工作原理
陀螺仪传感器
通过测量旋转轴的角速度来测量 角度变化,常用于测量物体的倾 斜角度和方向。
加速度传感器
通过测量重力加速度在特定轴上 的分量来计算物体的倾斜角度。
基于STC12C5410AD单片机的倾角监控系统设计

基于STC12C5410AD单片机的倾角监控系统设计
何小虎;李现明
【期刊名称】《工业控制计算机》
【年(卷),期】2010(023)010
【摘要】提出了基于STC12单片机的倾角监控系统设计的一种新方法.该系统采用STC12C5410AD单片机作为主控制器,运用三轴加速传感器MMA7260Q进行倾角测量,采用DS1302时钟芯片为角度采集时间标签,配合键盘、人机接口,可以设置角度报警值和实时显示当前角度数据,并实现声光报警.监控计算机通过Visual Basic串口通信可实时采集当前角度数值并存入后台Access数据库,同时可以控制本采集系统的测量参数,实现方便的角度监控.
【总页数】2页(P97-98)
【作者】何小虎;李现明
【作者单位】山东大学控制科学与工程学院,山东,济南,260061;山东大学控制科学与工程学院,山东,济南,260061
【正文语种】中文
【中图分类】TU8
【相关文献】
1.基于STC12C5410AD单片机的单相电参数测量仪设计 [J], 王俊杰;顾冬华
2.基于STC12C5410AD单片机的两轮自平衡小车的系统设计 [J], 杨亚龙;刘金栋;孙玉环;丁婷
3.基于STC12C5410AD单片机的数字电源设计 [J], 蔡金苹
4.基于STC12C5410AD单片机的数字电源设计 [J], 蔡金苹
5.基于STC12C5410AD单片机的镶嵌控制系统设计与实现 [J], 胡礼广;王刚因版权原因,仅展示原文概要,查看原文内容请购买。
基于MMA7260Q的数字倾角传感器设计
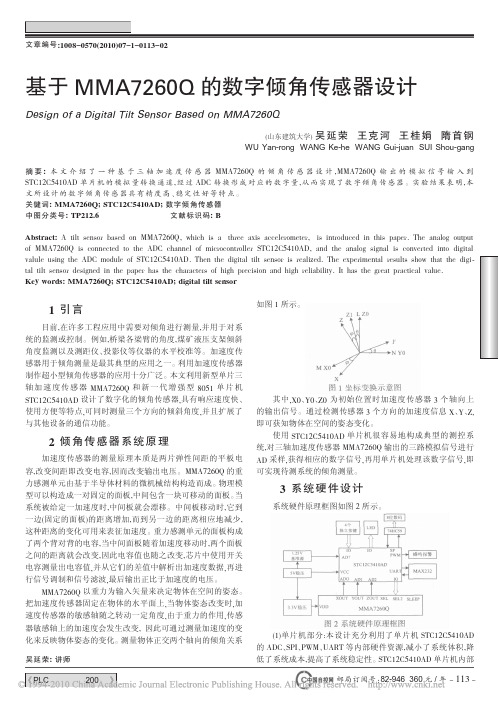
邮局订阅号:82-946360元/年技术创新传感器与仪器仪表《PLC 技术应用200例》您的论文得到两院院士关注基于MMA7260Q 的数字倾角传感器设计Design of a Digital Tilt Sensor Based on MMA7260Q(山东建筑大学)吴延荣王克河王桂娟隋首钢WU Yan-rong WANG Ke-he WANG Gui-juan SUI Shou-gang摘要:本文介绍了一种基于三轴加速度传感器MMA7260Q 的倾角传感器设计,MMA7260Q 输出的模拟信号输入到STC12C5410AD 单片机的模拟量转换通道,经过ADC 转换形成对应的数字量,从而实现了数字倾角传感器。
实验结果表明,本文所设计的数字倾角传感器具有精度高、稳定性好等特点。
关键词:MMA7260Q;STC12C5410AD;数字倾角传感器中图分类号:TP212.6文献标识码:BAbstract:A tilt sensor based on MMA7260Q,which is a three axis accelerometer,is introduced in this paper.The analog output of MMA7260Q is connected to the ADC channel of microcontroller STC12C5410AD,and the analog signal is converted into digital valule using the ADC module of STC12C5410AD.Then the digital tilt sensor is realized.The experimental results show that the digi -tal tilt sensor designed in the paper has the characters of high precision and high reliability.It has the great practical value.Key words:MMA7260Q;STC12C5410AD;digital tilt sensor文章编号:1008-0570(2010)07-1-0113-021引言目前,在许多工程应用中需要对倾角进行测量,并用于对系统的监测或控制。
基于MEMS传感器技术的倾角测量仪设计

T a i y u a n 0 3 0 0 5 1 ,C h i n a )
Abs t r a c t :A t i 1 t me a s u r i n g i n s t r u m e n t c o n s i s t S o f M E M S t i i t s e n s o r s a nd m i c r o c o n t r o l l e rs , a n d i t h a s
U ni v e r si t y o f C hi na , T ai y u a n 0 3 0 0 5 1 , C hi n a:
S ci e n c e a n d T e c h n o l og y o n E1 e c t r o ni c T e s t & Me as u re m e n t L a b o r a t o r y .
m a n y a d v a n t a g e s a s f o l l o w s :s m al l v o l u m e ,e a s y t o c a r r y ,h i g h p r e c i s i o n , s t r o n g a n t i _ j a m mi n g c a p a bi 1 i t y
1 引 言
目前很 多 工程 应用 领 域 需要 进行 精确 、 大量 程 的角 度测 最后~位 为小数 。 倾角测量仪 与计算机通讯采用 的是 U S B转 串口 量 以及 水平 面的确 定, 并 把采集 到的数 据交 由计算机 分析处理 芯 片 P L 2 3 0 3 , 该 芯 片 一 次 性 完 成 U S B至 T T L电 平 的 转 换 , 无 需 增 [ 1 , 2 ] 。 本文针对 这种需求 , 设计 了基于 M E M S加速度 倾角传感器 结构简 单。 的倾角测量仪, 硬件采用 S C A 6 1 0倾角传感器 , A t m e g a 8单 片机 , 加电平转 换芯 片, 数码管和 串 口数据通讯 。 软件方面进 行 了传感器 的线 性度拟合 ,
基于单片机的高精度倾角测量系统的设计
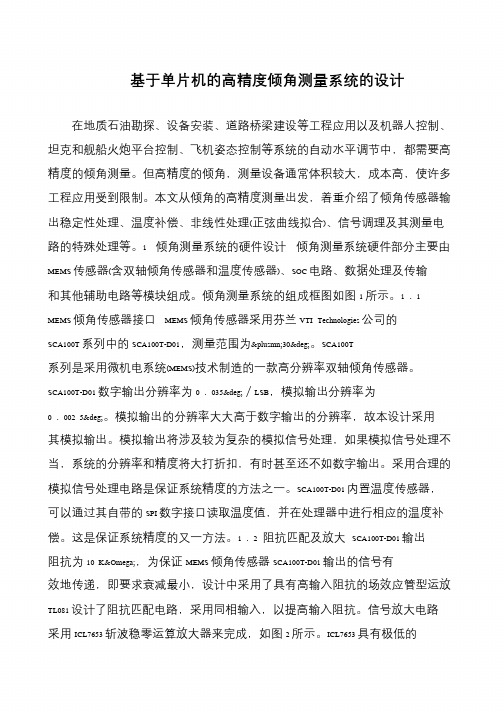
基于单片机的高精度倾角测量系统的设计在地质石油勘探、设备安装、道路桥梁建设等工程应用以及机器人控制、坦克和舰船火炮平台控制、飞机姿态控制等系统的自动水平调节中,都需要高精度的倾角测量。
但高精度的倾角,测量设备通常体积较大,成本高,使许多工程应用受到限制。
本文从倾角的高精度测量出发,着重介绍了倾角传感器输出稳定性处理、温度补偿、非线性处理(正弦曲线拟合)、信号调理及其测量电路的特殊处理等。
1 倾角测量系统的硬件设计倾角测量系统硬件部分主要由MEMS 传感器(含双轴倾角传感器和温度传感器)、SOC 电路、数据处理及传输和其他辅助电路等模块组成。
倾角测量系统的组成框图如图1 所示。
1.1 MEMS 倾角传感器接口MEMS 倾角传感器采用芬兰VTI Technologies 公司的SCA100T 系列中的SCA100T-D01,测量范围为±30°。
SCA100T 系列是采用微机电系统(MEMS)技术制造的一款高分辨率双轴倾角传感器。
SCA100T-D01 数字输出分辨率为0.035°/LSB,模拟输出分辨率为0.002 5°。
模拟输出的分辨率大大高于数字输出的分辨率,故本设计采用其模拟输出。
模拟输出将涉及较为复杂的模拟信号处理,如果模拟信号处理不当,系统的分辨率和精度将大打折扣,有时甚至还不如数字输出。
采用合理的模拟信号处理电路是保证系统精度的方法之一。
SCA100T-D01 内置温度传感器,可以通过其自带的SPI 数字接口读取温度值,并在处理器中进行相应的温度补偿。
这是保证系统精度的又一方法。
1.2 阻抗匹配及放大SCA100T-D01 输出阻抗为10 KΩ,为保证MEMS 倾角传感器SCA100T-D01 输出的信号有效地传递,即要求衰减最小,设计中采用了具有高输入阻抗的场效应管型运放TL081 设计了阻抗匹配电路,采用同相输入,以提高输入阻抗。
基于89C52单片机的倾角测量
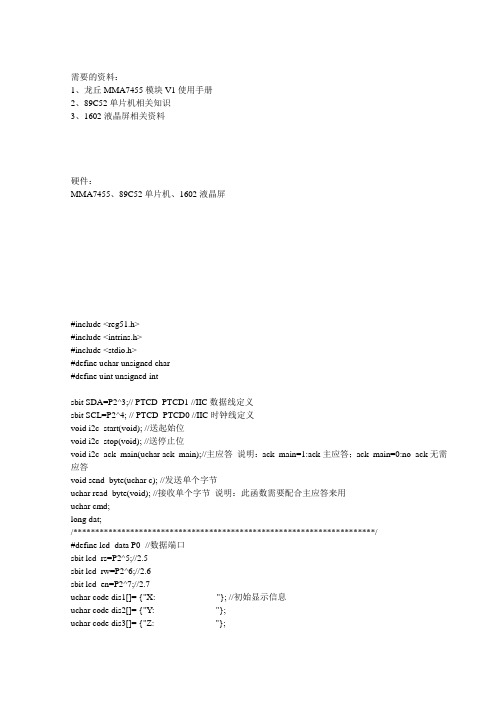
需要的资料:1、龙丘MMA7455模块V1使用手册2、89C52单片机相关知识3、1602液晶屏相关资料硬件:MMA7455、89C52单片机、1602液晶屏#include <reg51.h>#include <intrins.h>#include <stdio.h>#define uchar unsigned char#define uint unsigned intsbit SDA=P2^3;// PTCD_PTCD1 //IIC数据线定义sbit SCL=P2^4; // PTCD_PTCD0 //IIC时钟线定义void i2c_start(void); //送起始位void i2c_stop(void); //送停止位void i2c_ack_main(uchar ack_main);//主应答说明:ack_main=1:ack主应答;ack_main=0:no_ack无需应答void send_byte(uchar c); //发送单个字节uchar read_byte(void); //接收单个字节说明:此函数需要配合主应答来用uchar cmd;long dat;/*********************************************************************/#define lcd_data P0 //数据端口sbit lcd_rs=P2^5;//2.5sbit lcd_rw=P2^6;//2.6sbit lcd_en=P2^7;//2.7uchar code dis1[]= {"X: "}; //初始显示信息uchar code dis2[]= {"Y: "};uchar code dis3[]= {"Z: "};uchar code dis4[]= {"dushu "}; void display1();void display2();void display3();void display4();void delay_ms(uint z){uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}void write_cmd(uchar cmd) //写命令{lcd_rs=0;lcd_rw=0;lcd_en=0;P0=cmd;delay_ms(5);lcd_en=1;delay_ms(5);lcd_en=0;}void write_dat(uchar dat) //写数据{lcd_rs=1;lcd_rw=0;lcd_en=0;P0=dat;delay_ms(5);lcd_en=1;delay_ms(5);lcd_en=0;}void lcd_init(){write_cmd(0x30);delay_ms(10);write_cmd(0x0c);delay_ms(10);write_cmd(0x01);delay_ms(10);write_cmd(0x38);delay_ms(10);write_cmd(0x06);delay_ms(10);write_cmd(0x80);delay_ms(10);write_cmd(0x80+40);delay_ms(10);write_cmd(0x01);delay_ms(10);}void display1(){uchar i;write_cmd(0x80); //第一行for(i=0;i<16;i++){write_dat(dis1[i]);delay_ms(5);}}void display2(){uchar i;write_cmd(0x80+0x40); //第二行for(i=0;i<16;i++){write_dat(dis2[i]);delay_ms(5);}}void display3(){uchar i;write_cmd(0x88); //第三行for(i=0;i<16;i++){write_dat(dis3[i]);delay_ms(5);}}void display4(){uchar i;write_cmd(0x88+0x40); //第四行for(i=0;i<16;i++){write_dat(dis4[i]);delay_ms(5);}}void write_x(long x) /******************uchar hang,****************设置数据类型处*************************/{uchar xsd1,xsd2,xsd3;x=(256-x)*180/128;x=x-90;if(x>0){if(x>90)x=90;xsd1=x/100;xsd2=(x%100)/10; //MH时的显示xsd3=(x%100)%10;write_cmd(0x80+3);write_dat('+');write_dat(0x30+xsd1);write_dat(0x30+xsd2);write_dat(0x30+xsd3);}if(x<0){if(x<(-90))x=-90;xsd1=(-x)/100;xsd2=((-x)%100)/10; //MH时的显示xsd3=((-x)%100)%10;write_cmd(0x80+3);write_dat('-');write_dat(0x30+xsd1);write_dat(0x30+xsd2);write_dat(0x30+xsd3);}}void write_y(long y) /******************uchar hang,****************设置数据类型处*************************/{uchar xsd1,xsd2,xsd3;y=(238-y)*180/115;y=y-90;if(y<0){if(y<(-90))y=-90;xsd1=(-y)/100;xsd2=((-y)%100)/10; //MH时的显示xsd3=((-y)%100)%10;write_cmd(0x80+0x40+3);write_dat('-');write_dat(0x30+xsd1);write_dat(0x30+xsd2);write_dat(0x30+xsd3);}if(y>0){if(y>90)y=90;xsd1=y/100;xsd2=(y%100)/10; //MH时的显示xsd3=(y%100)%10;write_cmd(0x80+0x40+3);write_dat('+');write_dat(0x30+xsd1);write_dat(0x30+xsd2);write_dat(0x30+xsd3);}}void write_z(long z) /******************uchar hang,****************设置数据类型处*************************/{uchar xsd1,xsd2,xsd3;// if(0<z<63)// {z=(63-z)*90/63;if(z<0)z=90;xsd1=z/100;xsd2=(z%100)/10; //MH时的显示xsd3=(z%100)%10;write_cmd(0x88+3);write_dat('+');write_dat(0x30+xsd1);write_dat(0x30+xsd2);write_dat(0x30+xsd3);// }/* if(180<z<255){z=z-180;z=(75-z)*90/75;if(z>75)z=90;xsd1=z/100;xsd2=(z%100)/10; //MH时的显示xsd3=(z%100)%10;write_cmd(0x88+3);write_dat('-');write_dat(0x30+xsd1);write_dat(0x30+xsd2);write_dat(0x30+xsd3);} */}void Delay(void){_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}//********************************************** //送起始位SDA=1->0void i2c_start(void){SCL=0;SDA=1;Delay();SCL=1;Delay();SDA=0;Delay();SCL=0;}//************************************************ //送停止位SDA=0->1void i2c_stop(void){SCL=0;Delay();SDA=0;Delay();SCL=1;Delay();SDA=1;Delay();SCL=0;}//************************************************ //主应答(包含ack:SDA=0和no_ack:SDA=0)void i2c_ack_main(uchar ack_main){SCL=0;if(ack_main)SDA=0; //ack主应答elseSDA=1; //no_ack无需应答Delay();SCL=1;Delay();SCL=0;}//************************************************* //字节发送程序//发送c(可以是数据也可是地址),送完后接收从应答//不考虑从应答位void send_byte(uchar c){uchar i;for(i=0;i<8;i++){SCL=0;if((c<<i) & 0x80)SDA=1; //判断发送位else SDA=0;Delay();SCL=1;Delay();SCL=0;}Delay();SDA=1; //发送完8bit,释放总线准备接收应答位Delay();SCL=1;Delay(); //SDA上数据即是从应答位SCL=0; //不考虑从应答位|但要控制好时序}//**************************************************//字节接收程序//接收器件传来的数据,此程序应配合|主应答函数|i2c_ack_main()使用//return: byte型1字节uchar read_byte(){uchar i;uchar c;c=0;SCL=0;Delay();SDA=1; //置数据线为输入方式for(i=0;i<8;i++){Delay();SCL=0; //置时钟线为低,准备接收数据位Delay();SCL=1; //置时钟线为高,使数据线上数据有效Delay();c<<=1;if(SDA)c+=1; //读数据位,将接收的数据存c}SCL=0;SDA=1;return c;}/////////////////////////////mma7455驱动///////////////////////////////////////////读取uchar mma7455_readbyte(uchar address){unsigned char ret = 100;i2c_start();//启动send_byte(0x3A);//写入设备ID及写信号send_byte(address);//X地址i2c_start();//重新发送开始send_byte(0x3B);//写入设备ID及读信ret = read_byte();//读取一字节i2c_stop();return ret;}//写入void mma7455_writebyte(uchar address, uchar thedata) {i2c_start();//启动send_byte(0x3A);//写入设备ID及写信号send_byte(address);//X地址send_byte(thedata);//写入设备ID及读信i2c_stop();}//初始化void mma7455_init(){mma7455_writebyte(0x16, 0x05);}//主程序main(){uchar x,y,z;lcd_init(); //1602初始化display1();display2();display3();display4();mma7455_init();//初始化mma7455while(1){write_x(x);write_y(y);write_z(z);//读取重力信息x=mma7455_readbyte(0x06);y=mma7455_readbyte(0x07);z=mma7455_readbyte(0x08);} }。
基于HT46R24单片机倾斜角度测量仪的设计

图1运用应变规量测变形量
[ E2荷重元 内包含 应变规和 电桥 电路
在选 用荷重元 时,须注意量测
一
…
掰
j
图3将类 比信号转化为数字信号
-
. l
l L i
- 一
l 2
3 4
5
8
一
V
l 舶3 l 2 BN I 7 T7 P/ A
般 来说 ,荷重 元 的信 号极 为微弱 ,
主体用 来执行 逻辑 、运算 、计 时、
提前预 测意外 事故 的发 生;角 度测 型所 形成 的倾 斜角 ,使放 置在 车 内 的东西不易倾倒 ;可安装于病床 中让 病患能 自动调整所需倾斜角 ,而不须 再使用手摇方式调整病床的角度等。
教 学平 台,可 以积 极推进 高校 信息 参考文献
【 张喜艳 , 月光. 育信 息化 绩效特 征 4 ] 解 教 [ 王同 明. 网络辅助教学的研 究与探 结构解析O. 1 ] 高校 1 中国电化教育, 1 ( : —7 2 18 2 2 . 0 )4 化 建设 的应用水 平 ,可 以提 高学生
绱 三 ^S, d 一 I 嚣 P I HT
-
烈
矬
Байду номын сангаас
瞄培b 一 ^
Cl
潞 p^ C 一 S L
C 7
隔
I
予 口舭雌E8 ● L 9
I , ,陋 们' # 1 'p 椭 l M O 曩D 1 8 1 3 I
I 7 № I
I》 _. )鳗 廑 …………………………一 )
基于HT 6 4 4R2 单片机倾 斜角度测量仪 的设 计
许 昌职业技术学院 穆 亚辉 王俊 豪
基于单片机的一种新型角度传感器的设计

基于单片机的一种新型角度传感器的设计作者:张希元苏蓓蓓阚永恒来源:《中国管理信息化》2017年第09期[摘要]本文介绍了具有两种不同模拟量值输出的角度传感器。
传感器芯片检测到角度值后,由单片机转化为数字量,再经过DA转化,输出模拟量。
通过设置,可实现0~5V电压输出或者4~20mA电流输出。
[关键词]角度传感器;单片机;模拟量1前言角度传感器广泛应用于工程与农用机械、仪器仪表、土木工程、船舶、航空航天、工业自动化、卫星天线定位、平台运转监控、地质勘探、四轮定位系统等领域。
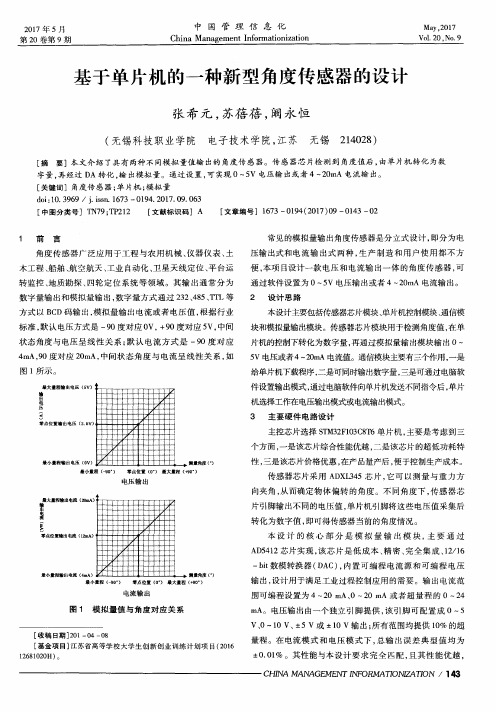
其输出通常分为数字量输出和模拟量输出,数字量方式通过232、485、TTL等方式以BCD码输出,模拟量输出电流或者电压值,根据行业标准,默认电压方式是-90度对应0V,+90度对应5V,中间状态角度与电压呈线性关系;默认电流方式是-90度对应4mA,90度对应20mA,中间状态角度与电流呈线性关系,如图1所示。
常见的模拟量输出角度传感器是分立式设计,即分为电压输出式和电流输出式两种,生产制造和用户使用都不方便,本项目设计一款电压和电流输出一体的角度传感器,可通过软件设置为0~5V电压输出或者4~20mA电流输出。
2设计思路本设计主要包括传感器芯片模块、单片机控制模块、通信模块和模拟量输出模块。
传感器芯片模块用于检测角度值,在单片机的控制下转化为数字量,再通过模拟量输出模块输出0~5V电压或者4-20mA电流值。
通信模块主要有三个作用,一是给单片机下载程序,二是可同时输出数字量,三是可通过电脑软件设置输出模式,通过电脑软件向单片机发送不同指令后,单片机选择工作在电压输出模式或电流输出模式。
3主要硬件电路设计主控芯片选择STM32F103C8T6单片机,主要是考虑到三个方面,一是该芯片综合性能优越,二是该芯片的超低功耗特性,三是该芯片价格优惠,在产品量产后,便于控制生产成本。
传感器芯片采用ADXL345芯片,它可以测量与重力方向夹角,从而确定物体偏转的角度。
基于STC12C5410AD单片机的倾角监控系统设计
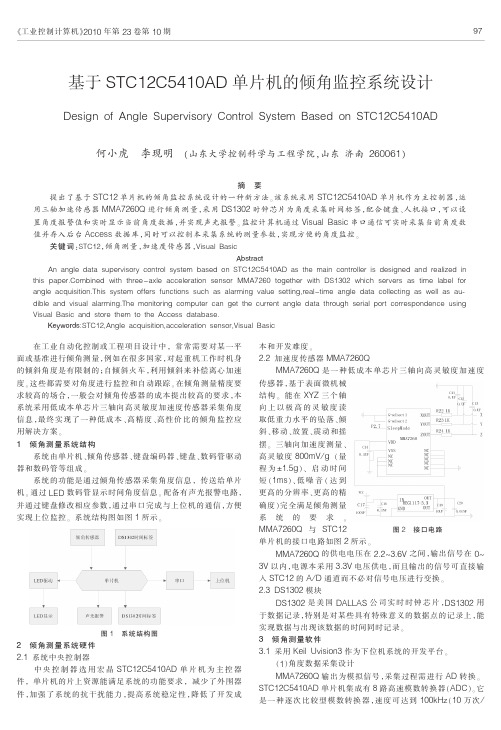
《工业控制计算机》2010年第23卷第10期Design of Angle Supervisory Control System Based on STC12C5410AD 何小虎李现明(山东大学控制科学与工程学院,山东济南260061)摘要提出了基于STC12单片机的倾角监控系统设计的一种新方法。
该系统采用STC12C5410AD单片机作为主控制器,运用三轴加速传感器MMA7260Q进行倾角测量,采用DS1302时钟芯片为角度采集时间标签,配合键盘、人机接口,可以设置角度报警值和实时显示当前角度数据,并实现声光报警。
监控计算机通过Visual Basic串口通信可实时采集当前角度数值并存入后台Access数据库,同时可以控制本采集系统的测量参数,实现方便的角度监控。
关键词:STC12,倾角测量,加速度传感器,Visual BasicAbstractAn angle data supervisory control system based on STC12C5410AD as the main controller is designed and realized in this paper.Combined with three-axle acceleration sensor MMA7260together with DS1302which servers as time label for angle acquisition.This system offers functions such as alarming value setting,real-time angle data collecting as well as au-dible and visual alarming.The monitoring computer can get the current angle data through serial port correspondence using Visual Basic and store them to the Access database.Keywords:STC12,Angle acquisition,acceleration sensor,Visual Basic在工业自动化控制或工程项目设计中,常常需要对某一平面或基准进行倾角测量,例如在很多国家,对起重机工作时机身的倾斜角度是有限制的;自倾斜火车,利用倾斜来补偿离心加速度。
基于单片机的倾角测量系统设计

基于单片机的倾角测量系统设计
唐原广;赵曙东
【期刊名称】《微计算机信息》
【年(卷),期】2007(000)03Z
【摘要】本文详细介绍了一种利用加速度传感器、AD转换器、单片机实现高精度倾角测量的方法。
给出了利用加速度传感器测量倾角的原理,提出了整体设计方案。
实验证明,该系统工作稳定可靠。
【总页数】3页(P96-97,95)
【作者】唐原广;赵曙东
【作者单位】中国海洋大学,山东青岛266003
【正文语种】中文
【中图分类】TP368
【相关文献】
1.基于CC1101的无线倾角测量系统设计 [J], 徐永;李昆;何小妹;王一璋
2.基于4G模块的高精度倾角测量系统设计 [J], 王涛;刘军;曾国强;卿松;胡天宇;郭生良
3.基于STC12C5410AD单片机的倾角监控系统设计 [J], 何小虎;李现明
4.基于单片机的倾角测量系统设计 [J], 唐原广;赵曙东
5.基于单片机的微型嵌入式温度测量仪的设计与实现分析基于PIN光电二极管的毫米级物体速度测量系统设计 [J], 何滔;雷富坤
因版权原因,仅展示原文概要,查看原文内容请购买。
基于嵌入式技术的倾角传感器检测系统设计
拟输出:Pin4:X模拟输出:Pin5:量程选择控制OSl(MMA 7260的pinl);Pin6:量程选择控制GSl(MMA 7260的 pinl):Pin7:悬空;Pin8:GND;Pin9:vcc(sv输入1;
APP
USARTITask.实现角度测量并将电压值传送到上
位机。嵌入式系统程序总流程见图4。 基于嵌入式操作系统的应用中,还有一项重要的工 作就是操作系统的移植和裁剪。所谓移植。就是使一个
实时内核能在某个微处理器或微控制器上运行. ttC/OS-II的移植工作主要包括:OS CPU.H文件中
与微处理器类型及相应硬件有关的常数定义、宏定义和
#defineTASK_STK_SIZE
OS_gTK 512
//定义任务栈的太小为512字节 STK_SIZE];H定义任务栈
APP_TaskStartSTK[TASK
void
APP_TukStm'(void‘tatata);,,声明任务
OSlnit0;//探作乐统初始化 OSTaskCreate((void(+×Void’))APP—-ADTask。
Guiyang Engineering Institute.Guizhou University,
550003,Chin∞
Abstract:The working principle,structure and function of
五、系统调试及结果
acceleration
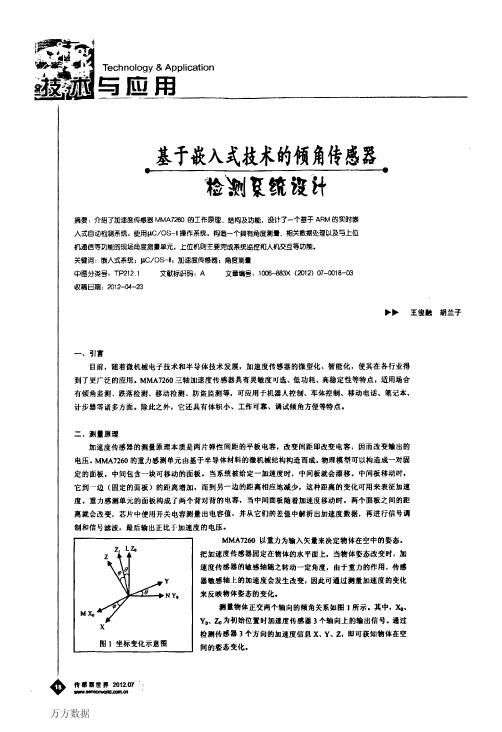
sensorMMA72源自0二、测量原理加速度传感器的测量原理本质是两片弹性间距的平板电容,改变间距即改变电容,因而改变输出的 电压。MMA7260的重力感测单元由基于半导体材料的微机械结构构造而成。物理模型可以构造成一对固 定的面板,中间包含一块可移动的面板.当系统被给定一加速度时,中间板就会漂移。中间板移动时, 它到一边(固定的面板)的距离增加,而到另一边的距离相应地减少。这种距离的变化可用来表征加速 度。重力感测单元的面板构成了两个背对背的电容,当中间面板随着加速度移动时。两个面板之间的距 离就会改变,芯片中使用开关电容测量出电容值。并从它们的差值中解析出加速度数据,再进行信号调 制和信号滤波,最后输出正比于加速度的电压. MMA7260以重力为输入矢量来决定物体在空中的姿态。 把加速度传感器固定在物体的水平面上,当物体姿态改变时,加 速度传感器的敏感轴随之转动一定角度,由于重力的作用。传感 器敏感轴上的加速度会发生改变,因此可通过测量加速度的变化 来反映物体姿态的变化. 测量物体正交两个轴向的倾角关系如图l所示.其中,xo、 Y口、zo为初始位置时加速度传感器3个轴向上的输出信号.通过 检测传感器3个方向的加速度信息x、Y、Z。即可获知物体在空
基于C8051F005单片机和MEMS加速度传感器ADXL311的倾角仪
基于C8051F005单片机和MEMS加速度传感器ADXL311
的倾角仪
丛培田;孟海星;韩辉;罗旋
【期刊名称】《仪表技术与传感器》
【年(卷),期】2010(000)001
【摘要】提出了一种基于C8051F005单片机和ADXL311双轴加速度传感器的数字式倾角仪的设计方法,并介绍了其软硬件的实现.该倾角仪的工作原理是依次在0°、90°、180° 3个不同位置,由C8051F005单片机A/D转换进行定标,然后将处理后的数据送外部设备显示.该倾角仪首次使用需先进行标定,改善因在不同工作环境下
所产生的角度误差,与传统的倾角仪相比具有很高的灵敏度,满足各种不同场合下测
量精度的要求.
【总页数】3页(P36-37,41)
【作者】丛培田;孟海星;韩辉;罗旋
【作者单位】沈阳理工大学机械工程学院,辽宁沈阳,110168;沈阳理工大学机械工
程学院,辽宁沈阳,110168;沈阳理工大学机械工程学院,辽宁沈阳,110168;沈阳工业
大学机械工程学院,辽宁沈阳,110178
【正文语种】中文
【中图分类】TP212.9
【相关文献】
1.基于MEMS加速度传感器的云高仪倾角和振动测量 [J], 何俊峰;张玉钧;陈臻懿;阮俊
2.基于C8051F005单片机航空交流电参数测试仪的设计 [J], 呼靳宏;郝迎吉;王瑜;王蒙
3.基于MEMS加速度传感器的数字倾角仪设计 [J], 沙承贤;李杰;翟成瑞;王博;胡丽丽
4.基于MEMS加速度传感器的倾角仪设计方法 [J], 苏君;王占平
5.基于MEMS加速度传感器的倾角仪设计方法 [J], 苏君;王占平
因版权原因,仅展示原文概要,查看原文内容请购买。
新型便携式倾角传感器设计
1 1 传 感器 敏 感元 件模块 .
S A0 C 6 C是 芬 兰 V I 技 公 司 推 出 的一 种 分 T科
辨率 高 、 噪声 角传 感器 芯 片 . 芯 片 可 用 来 测 量 物 体 是 否 处 该
于水 平 、 垂直 位 置或 与水 平成 一定 的角 度 , 它实 际 上是 一个 加 速 度 计 ,其 内 部 由敏 感 元 件 、 量 电 测 路 、 益放 大和 滤波 模块 组 成 , 增 它通 过 测 量地 球 引
1 电路 系统 方 案
倾 角 传感 器 敏感 元 件 S A 0 C 6 C的 输 出 电压 信
号 与 角 度 成 正 弦 关 系 变 化 , 过 模 数 ( n lgt 通 A a o o
力 在测 量方 向上 的分 量 , 将其 转 换为倾 斜 角度 . 采
用公 式 ( ) 角度 转 化为模 拟 输 出量 : 1将
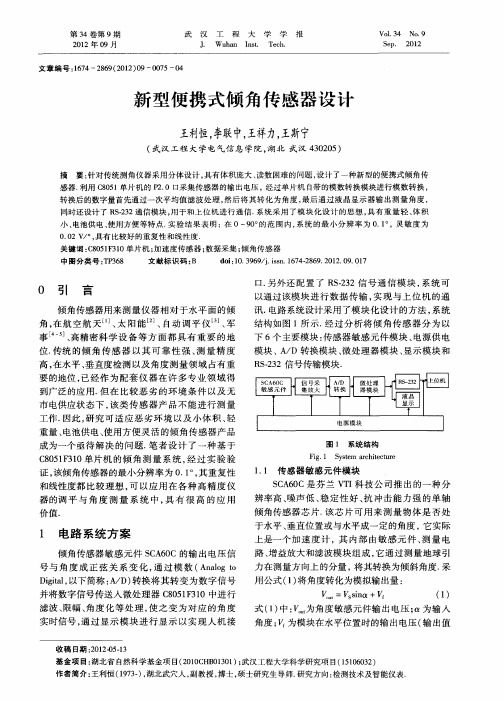
感器. 利用 C 0 1 85 单片机 的 P . 2 0口采集传感器 的输 出电压 ,经过单片机 自带 的模数转换模块进行 模数转换 ,
转换后的数字量首先通 过一 次平 均值滤 波处 理 , 后将 其转化 为角度 , 然 最后 通过 液 晶显 示器输 出测 量角度 ,
同时还设计 了 R -3 S2 2通信模 块 , 于和上位机 进行 通信. 用 系统 采用 了模块 化设 计 的思想 , 具有 重量 轻 、 体积 小、 电池 供电 、 使用方便 等特点. 验结 果表 明 : 0—9 。 范 围内 , 实 在 0的 系统 的最 小分 辨率 为 0 1 ,灵敏 度为 .。
讯. 电路 系统设 计 采用 了模 块化 设 计 的 方法 , 系统
结构 如 图 1所 示 . 过 分 析将 倾 角 传 感 器 分 为 以 经
基于PIC单片机的倾角传感器的设计
基于PIC单片机的倾角传感器的设计介绍倾角传感器的工作原理,对PIC16C72与倾角传感器的硬件接口电路及其软件进行了设计,并且该设计已经由实验得到验证。
关键词:PIC16C72;单片机;倾角传感器0 前言设计中的倾角传感器是新型变质面积电容式倾角传感器,该倾角传感器技术是为数不多的、能够兼有结构简单、可靠性高、有通用传感器集成电路等优点的倾角传感器技术之一。
在测绘仪器仪表、建筑机械、天线定位、机器人技术、坦克和舰船火炮平台控制、飞机姿态、汽车电子控制、石油勘探、海上平台监控等方面有广泛应用。
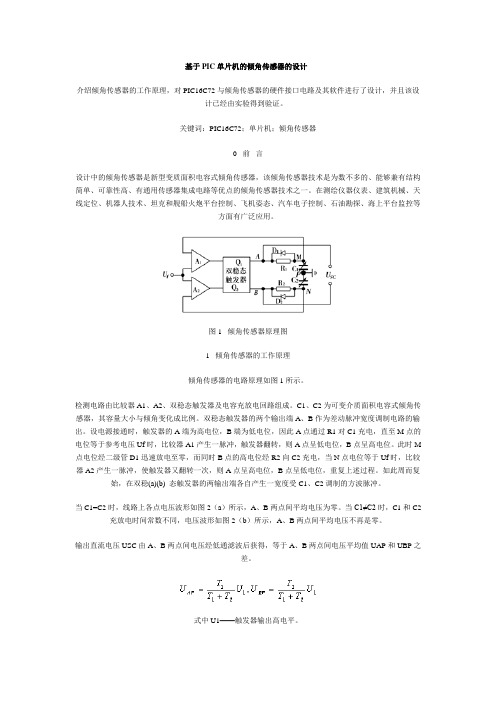
图1 倾角传感器原理图1 倾角传感器的工作原理倾角传感器的电路原理如图1所示。
检测电路由比较器A1、A2、双稳态触发器及电容充放电回路组成。
C1、C2为可变介质面积电容式倾角传感器,其容量大小与倾角变化成比例。
双稳态触发器的两个输出端A、B作为差动脉冲宽度调制电路的输出。
设电源接通时,触发器的A端为高电位,B端为低电位,因此A点通过R1对C1充电,直至M点的电位等于参考电压Uf时,比较器A1产生一脉冲,触发器翻转,则A点呈低电位,B点呈高电位。
此时M 点电位经二级管D1迅速放电至零,而同时B点的高电位经R2向C2充电,当N点电位等于Uf时,比较器A2产生一脉冲,使触发器又翻转一次,则A点呈高电位,B点呈低电位,重复上述过程。
如此周而复始,在双稳(a)(b) 态触发器的两输出端各自产生一宽度受C1、C2调制的方波脉冲。
当C1=C2时,线路上各点电压波形如图2(a)所示,A、B两点间平均电压为零。
当C1≠C2时,C1和C2充放电时间常数不同,电压波形如图2(b)所示,A、B两点间平均电压不再是零。
输出直流电压USC由A、B两点间电压经低通滤波后获得,等于A、B两点间电压平均值UAP和UBP之差。
式中U1——触发器输出高电平。
设充电电阻R1=R2=R,则得图5 主程序图6 A/D转换子程序4 实验结果按上述倾角测量原理及电路,我们制作了实际倾角测量装置,在实际转角测试平台上进行了测量实验,图7 为倾角实际测量曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PIC单片机的倾角传感器的设计
摘要:介绍倾角传感器的工作原理,对PIC16C72与倾角传感器的硬件接口电路及其软件进行了设计,并且该设计已经由实验得到验证。
关键词:PIC16C72;单片机;倾角传感器
0 前言
设计中的倾角传感器是新型变质面积电容式倾角传感器,该倾角传感器技术是为数不多的、能够兼有结构简单、可靠性高、有通用传感器集成电路等优点的倾角传感器技术之一。
在测绘仪器仪表、建筑机械、天线定位、机器人技术、坦克和舰船火炮平台控制、飞机姿态、汽车电子控制、石油勘探、海上平台监控等方面有广泛应用。
1 倾角传感器的工作原理
倾角传感器的电路原理如图1所示。
图1 倾角传感器原理图
检测电路由比较器A1、A2、双稳态触发器及电容充放电回路组成。
C1、C2为可变介质面积电容式倾角传感器,其容量大小与倾角变化成比例。
双稳态触发器的两个输出端A、B作为差动脉冲宽度调制电路的输出。
设电源接通时,触发器的A端为高电位,B端为低电位,因此A 点通过R1对C1充电,直至M点的电位等于参考电压U f时,比较器A1产生一脉冲,触发器翻转,则A点呈低电位,B点呈高电位。
此时M 点电位经二级管D1迅速放电至零,而同时B点的高电位经R2向C2充电,当N点电位等于U f时,比较器A2产生一脉冲,使触发器又翻转一次,则A点呈高电位,B点呈低电位,重复上述过程。
如此周而复始,在双稳(a)(b) 态触发器的两输出端各自产生一宽度受C1、C2调制的方波脉冲。
当C1=C2时,线路上各点电压波形如图2(a)所示,A、B两点间平均电
压为零。
当C1≠C2时,C1和C2充放电时间常数不同,电压波形如图2(b)
所示,A、B两点间平均电压不再是零。
输出直流电压U SC由A、B两点间电压经低通滤波后获得,等于A、B两
点间电压平均值U AP和U BP之差。
<!--[if !vml]-->
式中U1——触发器输出高电平。
图2 各点电压波形图
<!--[if !vml]-->
设充电电阻R1=R2=R ,则得
当倾角传感器在-90°=-+90°之间转动变化时,C1、C2的电容将随之发生变化。
由上面的等式可知,差动电容的变化使充电时间不同,从而使双稳态触发器输出端的方波脉冲宽度不同,因此A、B两点间输出直流电压U SC也不同,而且具有线性输出特性。
2 硬件设计
用芯片LM339 作为倾角传感器的两个电压比较器,芯片HBF4013AF作为倾角传感器的RS触发器,芯片LM324用作电压跟随器。
触发器的A点电压经低通滤波后,再由芯片LM324进行电压跟随,然后作为PIC16C72单片机RA0端口的模拟输入量。
基于PIC单片机的检测电路如图3所示。
图3 PIC 硬件连接图
PIC16C72 芯片是一种具有28个引脚的双列直插式芯片,有2k 的程序存储器和128 Byte 的RAM ,它提供22个I/O 引脚与电源掉电复位功能,内置的外围包括3个定时器,一个捕捉/比较/PWM 模块和一个同步串行通信端口,这个通信端口可以设置为使用两线的集成电路间通信模式,或是三线的串行外围接口。
PIC16C72提供8个中断源,并可由软件来设置它们的优
先权。
PIC16C72芯片的最大特点就是带有8位A/D 转换部件,有5个A/D 通道模拟输入,这些多通道模拟输入共用一个采样/保持电路,用一个多路转换开关进行切换。
使用A/D 转换功能时,应首先对A/D 控制寄存器ADCON0、ADCON1进行初始化定义,见图4.
PIC16C72的RA1端接有一校零电键,当PIC16C72采样时,若电键按下,则把当前倾角传感器的倾斜角定为零度角。
此时,数码管显示的数据为零(000.0)
.
图4 A /D 控制寄存器
本设计中,由4 个LED 数码管显示倾角传感器的倾斜角度。
第一个数码管显示符号位,中间两个显示整数位,最后一个数码管显示小数位。
显示的数值范围为-90.0°—+ 90.0°.LED数码管显示采用的是共阴极动态扫描。
RA2、RA4、RA5、RC0为位选端,当该端为高电平时,由三极管驱动位选。
RB0-RB7为段选,当它为高电平时分别驱动八段LED.
3 软件设计
主程序和A/D转换子程序流程图如图5和图6所示。
图5 主程序图6 A/D转换子程序
4 实验结果
按上述倾角测量原理及电路,我们制作了实际倾角测量装置,在实际转角测试
平台上进行了测量实验,图7 为倾角实际测量曲线。
其中,实线表示倾角传感
器从-90°逐渐增大到+90°时的测量曲线,虚线表示从刚才的+90°逐渐返回到-90°
的测量曲线。
从图中可以看出,我们设计及制作的倾角传感器能够实现-90°-
图7 倾角实际测量曲线
+90°之间的倾角测量,且具有较好的线性度,但测量存在一定的回差,这主要
是由于传感器中介质的性能造成的。
而且,若介质对温度变化敏感,则传感器
的测量精度也要随之受温度影响。
下一步的工作将寻求稳定的电容介质,提高
传感器的测量精度。
参考文献:
[1]窦振中.PIC系列单片机原理和程序设计[M].北京:北京航空航天大学出版社,2000.
[2]王有绪.PIC系列单片机接口技术与应用系统设计[M].北京:北京航空航天大学出版社,2001. [3]何信龙,李雪银.PIC16C7X入门与应用范例[M].北京:清华大学出版社,2002.
[4]彭树生.PIC单片机原理及应用[M].北京:机械工业出版社,2002.
[5]王化祥,张淑英.传感器原理及应用[M].天津:天津大学出版社,1997.。