自动割草机器人
多功能智能草坪养护机器人技术参数

多功能智能草坪养护机器人技术参数
多功能智能草坪养护机器人是一种自动化草坪养护设备,能够在草坪上进行修剪、浇水、施肥、杀虫等多种功能。
以下是该机器人的技术参数:
1. 外观尺寸:长 * 宽 * 高 = 500 * 500 * 300 毫米
2. 重量:10 公斤
3. 电池容量:24V 10Ah 锂电池
4. 充电时间:6 小时
5. 使用时间:3-4 小时
6. 最大行驶速度:0.8 米/秒
7. 最大爬坡角度:20 度
8. 工作面积:500 平方米
9. 割草高度范围:20-60 毫米
10. 割草宽度:280 毫米
11. 防盗功能:GPS 定位、遥控锁车、报警功能
12. 智能控制:自动避障、智能学习、云端控制
以上是多功能智能草坪养护机器人的技术参数,该机器人可以实现自动化草坪养护,为草坪管理人员提供高效便捷的工具。
- 1 -。
松灵无边界割草机器人控制技术方案
松灵无边界割草机器人控制技术方案松灵无边界割草机器人是一款智能化的割草设备,具备自主导航、智能控制等功能。
以下是关于松灵无边界割草机器人控制技术方案的中文描述:1. 自主导航系统:松灵无边界割草机器人采用先进的自主导航系统,能够通过内置的传感器、激光雷达和地图算法等技术,实现精确导航和避障功能。
它可以识别周围环境、规划最优路径,并且在工作过程中能够及时避开障碍物,确保割草任务的顺利进行。
2. 智能调度系统:松灵无边界割草机器人的智能调度系统具备灵活可调的工作模式。
用户可以通过手机App或者遥控器对机器人进行操作和设定,如设置工作时间、割草面积等。
机器人将根据设定自动启动和停止,并且能够根据草地生长情况智能调整工作策略,确保草坪保持整洁。
3. 安全保护系统:松灵无边界割草机器人具备安全保护系统,能够确保使用过程中的安全性。
一旦机器人感知到有障碍物或者遇到不平整的地面,会自动停止工作,并通过声音或光线等方式发出警告信号,提醒用户处理问题。
4. 远程监控功能:机器人配备了远程监控功能,用户可以通过手机App实时监控机器人的工作状态和位置。
同时,用户还可以收到通知提醒,了解机器人工作完成情况和电量剩余等信息,确保一切运行正常。
5. 高效能源管理:松灵无边界割草机器人采用高效能源管理技术,具备长时间工作能力。
当电量即将耗尽时,机器人会自动返回充电座进行充电,并在充满电后继续完成剩余的工作任务。
总之,松灵无边界割草机器人通过自主导航、智能调度、安全保护和远程监控等技术方案提供了高效、智能的割草解决方案,为用户提供便利和舒适的草坪维护体验。
一种智能割草机器人系统设计
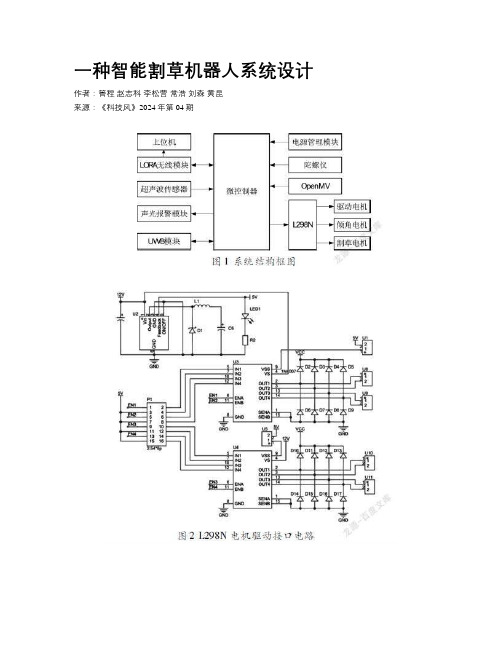
一种智能割草机器人系统设计作者:管程赵志科李松营常浩刘森黄昆来源:《科技风》2024年第04期摘要:该系统以微控制器为核心,采用OpenMV与超声波传感器相结合的方式实现导航与避障功能,通过陀螺仪实时检测地况平整度来调整刀具倾角,通过搭载的UWB模块与LORA模块实现路径规划与远程监控,并设计了整体机械结构及伸缩式刀具结构,为智能割草机器人提供了完整设计方案。
关键词:割草机器人;路径规划;远程监控中图分类号:TP242草坪在城市和景区绿化方面发挥着重要作用,然而随着草坪面积的不断增大,草坪的日常修剪成为一项繁重的工作。
为了减轻草坪修剪维护的成本,割草机器人应运而生[12]。
现有的割草机器人主要有轮式驱动和履带驱动两种方式。
履带式割草机人具有爬坡能力强,适应不同地况的优点,但自身重量偏重,对动力电池的要求较高。
轮式割草机器人具有驱动结构简单的优点,在现有的割草机器人中应用最为广泛。
割草路径规划是割草机器人智能化的重要特征。
现有的割草机器人主要借助超声波传感器、激光雷达、机器视觉、北斗导航等信息获取方式,并通过Dijkstra算法、A*算法、D*算法、人工势场法等路径规划算法实现最佳路径选择[34]。
近年来,随着人工智能和图像处理硬件性能的大幅提升,使得实时图像处理与控制决策成为可能,也使得YOLO等目标检测算法越来越多地应用于割草机器人的路径规划之中。
但是,这些割草机器人普遍存在智能化程度低,且仅能胜任平整草坪的修建工作,无法适应全天候、多种地况作业的修剪任务[5]。
特别是因缺乏智能路径选择算法,容易出现重复作业和遗漏未修剪的情况出现。
因此,迫切需要设计一种适应多种地况的新型智能割草机器人。
1系统总体设计本设计的智能割草机器人系统方案,如图1所示。
本设计的微控制选择STM32F407作为整个控制系统的核心,用于处理各个传感器获得的数据信息,并做出控制决策。
陀螺仪选用MPU6050,用于实时获取行进中机器人的位置姿态,根据运行姿态来调整割草刀具的倾斜角度。
自动割草机器人的设计

1 系 统 结 构
自 动 割 草 机 器 人 主 控 系 统 的 结 构 框 图 如 图 1所 示 。
动 割 草 机 器人 的行 动 电机 以及 割 草 电机 进 行 控 制 。传 感 器 系 统 由电 子篱 笆 传 感 器 、光 电 开关 传 感 器 、碰 撞 开 关 传 感
等 通 用 串行 接 口 ,高 达 4 0 MHz的 主 频 完 全 可 以 胜 任 本 系统 的计算 和处理 速度 。 运 动 系 统 主 要 通 过 单 片 机 给 出 的多 路 P WM 信 号 对 自
护 、 型 草 地 的 修 剪 。 自动 割 草 机 器 人 的 平 台 融 合 了 运 大
Em b d d Tec n og e de h ol y
自动 割 草机 器 人 的设 计
黄 杰, 苏谢 祖 , 钢 锋 颜 ( 江 大 学 电 气工 程 学 院 , 江 杭 州 302) 浙 浙 1 0 7
摘 要 :介 绍 自动 割 草 机 器 人 的 设 计 和 实 现 。 其 硬 件 系 统 主 要 包 括 单 片 机 系统 、 电机 控 制 器 以 及
l wn nd sr Ev r ye r i a i u ty. ey a ,t l c ns wil o ume os f e o c s o lt o r s ur e t mait i t s pu lc r a a s. bo l wn n an ho e b i a e lwn Ro t a mo r a r du e h s we c n e c t o e
中 图 分 类 号 :T 2 26 P 4 . 文 献 标 识 码 :B 文 章 编 号 :0 5 — 9 8 2 1 ) 8 0 3 — 4 2 8 7 9 (0 0 0 — 0 3 0
宝时得无边界割草机器人控制技术方案(一)
宝时得无边界割草机器人控制技术方案(一)宝时得无边界割草机器人控制技术方案背景介绍•宝时得是一家领先的智能设备制造公司,致力于开发高效、智能的割草机器人。
•在市场调研中发现,用户对无边界割草机器人的需求越来越高。
技术方案概述•本技术方案旨在开发一种能够自由移动、无需边界线限制的割草机器人控制技术。
方案细节1. 定位技术的选择•可采用激光雷达和视觉传感器相结合的定位技术。
激光雷达用于获取机器人周围环境的地形信息,视觉传感器用于识别障碍物和边界。
2. 机器人路径规划算法•使用启发式算法,结合地形信息和视觉感知数据,规划机器人的移动路径。
•按照优先级划分区域,确保机器人先割草完重要区域,然后再处理次要区域。
3. 通信技术的选择•采用无线通信技术,通过与用户手机的连接,实现远程控制和监控功能。
•机器人的状态信息、割草进度等数据会实时传输给用户手机端。
4. 自动充电技术•嵌入充电电池和充电座,实现机器人自动返回充电。
•机器人低电量时,将自动停止割草并返回充电座,等待充电完毕后恢复工作。
5. 联网升级与维护•机器人固件支持在线升级,方便引入新功能和性能提升。
•通过远程维护功能,能够实时监测机器人的运行状况,提供及时的故障排查和解决方案。
预期效果•实现无边界割草技术,提高割草效率,减轻用户操作负担。
•各项智能技术的应用,让用户能够更方便地控制和管理割草机器人。
•提供优质的售后服务,保障产品的稳定运行。
结语•本技术方案旨在满足用户对高效、智能的割草机器人的需求,通过创新的技术手段,帮助用户轻松享受美丽的草坪。
割草机器人结构组成部件
割草机器人结构组成部件嘿,朋友们!今天咱来聊聊割草机器人那些事儿。
你想想看,割草机器人就像是一个勤劳的小园丁,在草坪上默默工作着。
它主要有几个关键的组成部件哦。
首先得说说它的“小脑袋”,也就是传感器啦。
这玩意儿就像是机器人的眼睛和耳朵,能感知周围的环境,什么草啊、石头啊、障碍物啊,它都能分辨得清清楚楚,然后聪明地绕过去或者停下来,厉害吧?你说这要是没有这灵敏的传感器,那不就跟个没头苍蝇似的乱撞啦!还有那“小脚丫”,也就是轮子。
这可不能小看,好的轮子能让它在草坪上跑得稳稳当当,不管是平坦的还是有点起伏的地面,都能轻松应对。
就像我们人走路得有双好鞋一样,不然还不得摔跟头呀!当然啦,割草机器人的“大心脏”——电池也很重要啊。
这电池就好比是机器人的能量源泉,要是电池不行,干一会儿活就没电了,那多扫兴啊!好的电池能让它持续工作好长时间呢,让草坪一直保持整洁漂亮。
再说说它的“镰刀”,也就是割草的部件啦。
这可是它的主要工作工具,得锋利,得高效,才能把草割得整整齐齐的。
想象一下,如果这“镰刀”不好使,那草不就跟被狗啃了似的,多难看呀!割草机器人还有个“小身体”,这里面可藏着好多电路和控制系统呢。
就像是人的神经系统一样,指挥着机器人的一举一动。
要是这“神经系统”出了问题,那机器人还不得瘫痪啦?你看,割草机器人虽然不大,但是里面的门道可不少呢!这些组成部件就像是一个团队,各自发挥着自己的作用,共同努力让草坪变得美美的。
有了它,我们就不用自己费力地去割草啦,可以省下好多时间和精力呢!所以啊,别小看这小小的割草机器人,它可是个厉害的小家伙呢!它能让我们的生活变得更加轻松和美好。
怎么样,是不是对割草机器人有了更深的了解啦?。
割草机器人工作原理

割草机器人工作原理引言:随着科技的不断发展,人们的生活水平不断提高,对于生活质量的要求也越来越高。
在过去,割草是一项枯燥乏味的任务,需要人们花费大量的时间和精力。
然而,随着割草机器人的出现,这项任务变得更加便捷和高效。
本文将介绍割草机器人的工作原理。
一、传感器系统割草机器人的工作原理首先依赖于其配备的传感器系统。
传感器系统主要包括以下几个方面:1.1 视觉传感器割草机器人通常配备了摄像头或激光雷达等视觉传感器,用于感知周围环境。
通过视觉传感器,机器人可以识别和判断障碍物、边界线以及草坪的形状和大小。
1.2 碰撞传感器为了避免与障碍物碰撞,割草机器人还配备了碰撞传感器。
碰撞传感器可以感知到机器人与物体的接触,一旦发生碰撞,机器人会立即停下来或改变方向,以避免进一步的碰撞。
1.3 坡度传感器割草机器人还配备了坡度传感器,用于感知地面的坡度。
通过坡度传感器,机器人可以判断草坪的坡度,以便在操作过程中做出相应的调整,保证割草的效果和安全性。
二、导航系统割草机器人的导航系统是其工作的关键。
导航系统主要包括以下几个方面:2.1 GPS定位割草机器人通常配备了全球定位系统(GPS),用于定位其所处的位置。
通过GPS定位,机器人可以在草坪上制定割草的路径,并确定其工作区域。
2.2 地图绘制在完成GPS定位后,割草机器人会通过传感器系统收集到的数据,绘制出草坪的地图。
地图绘制包括识别边界线、障碍物和其他地物等步骤,以便机器人在工作时能够避开障碍物,并按照预定路径进行割草。
2.3 路径规划根据绘制出的地图,割草机器人会通过路径规划算法确定最优的割草路径。
路径规划的目标是尽量降低机器人的移动距离和时间,提高割草效率。
三、割草系统割草机器人的割草系统是机器人最核心的部分。
割草系统主要包括以下几个方面:3.1 割刀装置割草机器人一般配备了割刀装置,用于割除草坪上的草。
割刀装置通常由多个旋转刀片组成,可以快速而均匀地割断草坪上的草。
智能割草机器人设计

智能割草机器人设计
摘要:本文介绍了一种智能割草机器人的设计。
该设计包括机器人结构、电源驱动系统、通信系统、导航系统和控制系统。
详细讨论了设计要求、机械结构、电力驱动系统、通信系统、导航系统和控制系统。
最后完成了机器人的基本设计,可为相关研究提供参考。
1 Introduction
1引言
近年来,随着智能技术的不断发展,智能机器人也被广泛应用于人们的日常生活中,比如智能吸尘器和机器人割草机。
智能割草机器人是最新型的机器人,可以自动割草园林,不仅节省了人们繁琐的割草工作,而且能够保证草坪割草的均匀性,使草坪看起来更加美观整洁。
为了满足人们的实际需求,机器人设计需要满足低成本、低能耗、结构组件少、易于控制和高可靠性的要求。
2 Design requirements
2.1 Mechanical structure
2设计要求
2.1机械结构。
智能割草机器人设计说明书

本科毕业设计说明书题目: 智能割草机器人的研究院(部:机电学院专业: 机械工程及自动化班级:姓名:学号:指导教师:完成日期:2013年6月15日摘要本文首先对国内外市场上现存的智能割草机器人进行了介绍和比较,指出了现在智能割草机器人研制过程中需要注意的关键技术,并结合以往的成功经验和现在的实际需求,选择了结构易于实现的三轮车体结构。
根据智能割草机器人控制系统要求,确定了以AT89C51单片机为核心的智能割草机器人控制方案,将智能割草机器人的控制系统划分成了电机驱动单元、电机控制单元和传感单元等几个部分,最终确定了智能割草机器人的技术指标。
针对上述要求,进行了智能割草机器人机械本体的设计。
首先,根据相关的计算确定了所需驱动电机的参数,并以此为基础进行了电机选型。
然后根据选择的电机情况为智能割草机器人设计了驱动系统的减速机构。
最后,结合智能割草机器人的任务特点,为其设计了特制的割草机构。
控制系统是实现自动割草机器入自主执行割草任务的关键部分,根据具体的任务要求结合低成本的思想,确定了为电机控制和传感系统分别设置独立处理芯片的策略,控制系统首先对各个传感器件发送的环境信号进行预处理,再为智能割草机器人的运动控制反馈合适的环境信息。
然后电机控制单元结合发送的信号对智能割草机器人进行相应的运动调节。
关键词:智能割草机器人;移动机器人机械本体设计;电机控制;传感系统;割草机构Research and Development of Autonomous Robot Lawn MowerABSTRACTThis paper first introduces and compares existing mower robots,point out the key technologies and the successful experience for autonomous robot lawn mower development, chose a simple tricycle structure.According to the needs of autonomous robot lawn mower control system。
智能割草机解决方案

智能割草机解决方案随着经济的发展,各国城市建设逐渐深化,城区的绿化程度也随之提高,大量的公园草坪、足球场草坪、GOLF球场草坪等公共绿地均需要进行维护。
在各种草坪维护作业中,以草皮修剪工作最为繁重,不仅枯燥,而且重复性强,通常需要消耗大量的人力和物力。
为了降低草坪维护作业的劳动强度和成本,近年来我国提出用现代电子技术和智能控制技术改造和提升草坪机械产业的战略,近日,英唐众创方案公司研发了一款智能割草机器人,取代了传统的割草机。
智能割草机的特点自动割草、清理草屑、自动避雨、自动充电、自动躲避障碍物、外形小巧、电子虚拟篱笆、网络控制等。
智能割草机适用于清除平原、丘陵、梯田、果园、三角地等大小地块芦苇、苜蓿、鱼草等各类杂草,操作简单,工作效率高。
我们平时常见到是在学校,以及街道美化,都是用割草机来完成的,在国外,许多家庭都备有除草机,用来为自己的花园除草。
智能割草机功能优势1、预约工作功能割草机可以在割草之前进行手动设置每天的工作时间,割草机会在设定的时间内自动出去割草,在设置的时间内自动回航充电,如果割草期间机器出现电池电量不足,割草机会自动回航充电,充完电之后继续去充电。
既节省了客户的时间,也大大减轻了客户的工作强度。
2、防水功能割草机有底盖,中盖,中盖和上盖三层结构,中盖和上盖双层防水,内部线路都进行了防水漆处理。
而且可以进行泼水,水龙头直冲,无需防雨棚,可以直接保证割草机内部主板的正常运行。
3、自动避雨功能割草机尾部把手处设有个两个雨水感应铜片,下雨的时侯雨水滴落在铜头上,割草机可以自动感应,立即停止割草并回航充电。
4、安全保护在出现以下6种错误操作,为保护机器将自动停止运作。
所有的停止操作都是先停止刀片运转后停止轮胎。
错误一:当机器感受不到线圈发出的信号时,机器运行4分钟后自动停止错误二:机器运作,割到硬石头等小障碍物,机器的电流会超过定值,当超过定值时为了保护机器,设置了机器自动停止运作。
基于人工智能技术的割草机器人设计与优化

基于人工智能技术的割草机器人设计与优化一、引言割草机器人是一种基于人工智能技术的自动化设备,旨在解决人力割草效率低下的问题。
本文将围绕割草机器人的设计与优化展开讨论,涵盖机器人结构、导航系统、割草算法以及性能优化等方面内容。
二、机器人结构设计割草机器人的结构设计应该合理符合实际运行需求。
首先,机器人应具备轻巧、紧凑的外形以适应狭窄和不平整的草坪环境。
其次,机器人需配备适宜大小的割草刀具,确保割草效果达到预期。
此外,机器人的底部需设置传感器来感知地形和障碍物,以便进行导航和避障。
三、导航系统设计割草机器人的导航系统是实现自主运动和割草功能的关键。
首先,机器人应该配备高精度的全球定位系统(GPS)和惯性导航系统(INS),用于定位和导航。
其次,机器人需要激光雷达等传感器,以感知周围环境的地形、障碍物和边界等信息。
最后,导航系统还应具备智能路径规划功能,考虑优化割草路径,节约时间和能量。
四、割草算法设计割草机器人的割草算法决定了割草的效果和效率。
首先,机器人应该能够根据草坪的形状和大小,合理规划割草路径,确保覆盖率达到最大化。
其次,机器人需要具备边界识别和避障能力,避免割草时损坏草坪边缘和撞击障碍物。
最后,割草机器人还应根据草坪的生长速度,合理调整割草频率和割草高度,保持草坪整洁。
五、性能优化为了提高割草机器人的性能,在设计与优化过程中,可以考虑以下方面。
首先,机器人的能源管理系统应该设计合理,以延长机器人的工作时间。
其次,机器人的智能化程度可以通过深度学习等方法提高,使其能够自动适应不同类型的草坪和环境。
最后,为了降低机器人的维护成本,可以考虑采用可拆解和易维修的设计,以便快速更换零部件。
六、安全性考虑在割草机器人的设计与优化中,安全性是一个重要的因素。
机器人应该具备防误伤人和宠物的功能,通过传感器和智能算法识别周围人员和动物,并自动停止割草操作。
此外,机器人还应具备防盗功能,如密码保护和远程锁定等,以避免机器人被盗或滥用。
割草机器人设计理念是什么
割草机器人设计理念是什么
随着科技的不断发展,人们对于生活质量的要求也越来越高。
在农业领域,传统的农耕方式已经无法满足现代社会的需求。
因此,农业机械化成为了农业发展的必然趋势。
而在农业机械化中,割草机器人的设计理念成为了人们关注的焦点。
割草机器人的设计理念主要包括以下几个方面:
1. 自动化,割草机器人的设计理念之一是实现自动化操作。
通过激光雷达、红外线传感器等高科技设备,割草机器人可以自主识别草坪的形状和大小,自动规划割草路线,完成割草任务。
这种自动化设计理念大大提高了割草效率,减少了人力成本。
2. 精准化,割草机器人的设计理念还包括精准化操作。
通过高精度的定位系统和先进的导航技术,割草机器人可以精准地控制割草刀片的位置和角度,确保每一处草坪都能被均匀地修剪,保持草坪整洁美观。
3. 环保节能,割草机器人的设计理念还注重环保节能。
采用电动驱动系统,割草机器人不产生尾气和噪音污染,对环境友好。
同时,割草机器人还可以通过太阳能充电,减少能源消耗,实现节能减排。
4. 智能化,割草机器人的设计理念还包括智能化操作。
通过人工智能技术,割草机器人可以学习草坪的生长规律,根据不同的季节和天气条件调整割草策略,实现智能化管理。
总的来说,割草机器人的设计理念是以提高工作效率、保护环境、节约能源为宗旨,通过自动化、精准化、环保节能和智能化的设计理念,实现对草坪的高效修剪,为人们创造一个美丽整洁的生活环境。
随着科技的不断进步,相信割草机器人的设计理念也会不断完善,为人们的生活带来更多便利和舒适。
剪草机器人应用场景
剪草机器人的应用场景
剪草机器人的应用场景非常广泛,包括但不限于以下几种情况:
1. 家庭庭院:剪草机器人非常适合小型家庭庭院场景,可以高效地完成剪草任务,让家庭庭院更加整洁美观。
2. 公园和公共绿地:公园和公共绿地面积较大,需要定期修剪草坪。
使用剪草机器人可以大大提高修剪效率,节省人力成本。
3. 高尔夫球场:高尔夫球场对草坪的要求非常高,需要保持草坪的平整和美观。
剪草机器人可以精确地控制修剪高度和速度,满足高尔夫球场对草坪的特殊需求。
4. 足球场和其他运动场地:足球场和其他运动场地需要定期修剪草坪以保持场地质量。
剪草机器人可以快速高效地完成修剪任务,确保运动场地符合比赛要求。
5. 农业领域:在农业领域,剪草机器人也可以用于修剪农田中的杂草,提高农作物的产量和质量。
总之,随着科技的不断发展,剪草机器人的应用场景也在不断扩大。
未来,剪草机器人将会在更多领域得到应用,为人们的生活和工作带来更多便利。
智能割草机器人的研究综述

智能割草机器人的研究综述第29卷第4期2007年7月机器人ROBOTV o1.29,No.4July,2007文章编号:1002-0446(2007)04-0407—10智能割草机器人的研究综述丛明,金立刚,房波(大连理工大学精密与特种加工教育部重点实验室,辽宁大连l16023)摘要:分析了国内外智能割草机器人的研究现状.讨论了智能割草机器人在机械结构,传感系统和路径规划算法等方面的现有研究方法.指出了智能割草机器人研究中存在的问题.最后,展望了智能割草机器人的发展方向.关键词:智能割草机器人;机械结构;感应系统;控制系统;路径规划算法中图分类号:TP24文献标识码:AIntelligentRobotMowers:AReviewCONGMing,JINLi—gang,FANGBo(KeyLaborator?/forPrecn8ndNon.tr口d'M.chingTechnnkgyMtEduc毗∽DalianUniversityofTechnology,Dalian116023,China)Abstract:Thispaperanalyzesthestateoftheartofintelligentrobotmowers,anddescribesthec urrentapproachesforin—telligentrobotmowersintermsofmechanism,sensingsystemandpathplanningalgorithm.E xistingproblemsinthefieldofintelligentrobotBowel'sarepointedout.Finally,futuredevelopmenttrendofintelligentrobo tmowersispresented.Keywords:intelligentrobotmower;mechanicalstructure;sensingsystem;controlsystem;p athplanningalgorithm1引言(Introduction)随着经济的发展,各国城市建设逐渐深化,城区的绿化程度也随之提高,大量的公园草坪,足球场草坪,高尔夫球场草坪等公共绿地均需要进行维护.在各种草坪维护作业中,以草皮修剪工作最为繁重,不仅枯燥,而且重复性强,通常需要消耗大量的人力和物力¨j.为了降低草坪维护作业的劳动强度,近年来一些西方国家提出用现代电子技术和智能控制技术来改造和提升草坪机械产业的战略,并于1997年的OPEI(OutdoorPowerEquipmentInstitute)年会上, 第一次提出了智能割草机器人(IntelligentRobot Mower,IRM)的概念,希望在不久的将来用智能割草机器人取代传统的割草机.智能割草机器人是集环境感知,路径动态规划和行为控制等多种功能于一体的综合机器人系统, 与传统的草坪修剪机械相比,智能割草机器人更具有优势:第一,智能割草机器人可自主工作.传统的割草机自动化程度比较低,需要人工操作,而智能割草机器人内部搭载了高速微处理芯片,能结合传感器信收稿日期:2006—08—31息自行识别外部的工作环境并进行作业,不需要或者仅需要少量的人工干预.第二,智能割草机器人具有较高的安全性.智能割草机器人采用了传感单元和控制系统,与人工操作传统割草机相比,智能割草机器人的灵敏性更强, 检测范围更宽,精确度也更高,并且不会带来因疲劳而造成的意外事故.此外,智能割草机器人还可以根据不同条件按一定的策略控制自身的各个元件,来最大程度地降低伤害的可能性,如:当车体倾翻时, 停止割草刀片的运行等.第三,智能割草机器人更利于环境保护.传统割草机的割草机构主要通过内燃机和蓄电池驱动.采用内燃机供能时,会产生高分贝的噪声和燃烧不充分的废气,这将严重影响操作者及周边人员的身体健康;采用蓄电池供能时,虽然能降低污染,但受电池电量及体积的限制,在割草过程中需要操作者往返多次进行充电,降低了实用性.而智能割草机器人由于采用了自动控制系统,能返回预定地点而不需要人工干预,所以智能割草机器人采用清洁的电能时,不会带来额外的劳动量.并且,由于智能割草机机器人2007年7月器人具有体积小,重量轻和所需功率小等特点,在阳光充足的地区,完全可以采用太阳能电池作为动力源,更能体现其低污染的优势.当然,割草机器人也存在一些需要改进和完善的不足之处.比如,为了适应不同类型草坪的割草任务,智能割草机器人的机械本体结构还需要进一步的优化;由于智能割草机器人在户外非结构化的空间中工作,其控制能力和安全性还有待于提高;需要研究基于无线网络和移动电话通讯网络的智能割草机器人远程通讯技术等.2研究现状(Stateoftheart)最早的割草机器人大约诞生在第二次世界大战结束之后(20世纪50~60年代左右),受时代的影响,大量的军工技术开始转向民用领域,极大程度地带动了家庭生活的自动化.图1为摘录于互联网的早期割草机器人产品,日期不详,虽然图中的机器人并不具有智能性,仅能依靠人工遥控进行作业,但却为以后智能割草机器人的发展提供了一定的基础.图1早期的割草机器人Fig.1Earlyagemowerrobot割草机器人智能化的研究建立在智能控制领域逐渐发展的基础上,微型处理器的研制成功又使得利用小体积,低功耗控制器进行运动控制成为可能, ,在最近的二十年里,不同种类的智能割草机器人相继问世,它们大多性能相近,能自动割草,同时具有定时启动,自动充电等辅助功能.割草机器人的智能性主要体现在其自主工作的能力上:低智能的割草机器人只依据设定的轨迹进行工作,不具备动态分析外部环境的能力,当在路径上遇到障碍物时停止, 等待障碍物离开后再继续运行或请求人工协助绕开障碍物;中等智能的割草机器人则依照某种策略绕过障碍物,但不能保证完全覆盖除障碍物以外的其他所有区域,剩余未割草坪由人工修整;高智能的割草机器人能直接建立工作区间的地图,具备路径自主规划和决策的能力,无需任何外部因素干预即可实现割草区域的完全遍历.由于割草机器人属于民用领域,总会受到制造成本的约束,往往并不能采用昂贵的定位和视觉处理设备来保证其高智能性,因此目前所见到的割草机器人大多处于中等智能水平到高等智能水平的过渡阶段.2.1国外研究现状国外对智能割草机器人的研究已有十多年的积累,并取得了一定成果,从事研究的单位既包括公司企业和大专院校,也有机器人爱好者团体和个人.在欧洲和北美等草坪拥有量高的西方发达国家,已将智能割草机器人作为产品在市场上销售,但基本上都属于中等智能水平;在美国,草坪业已经成为其十大支柱产业之一,为了促进智能割草机器人的研发, 从2004年起每年都要举行一次自动割草机器人比赛(AnnualAutonomousLawnmowerCompetition)[5.6J,目的在于实现智能割草机器人的全自主运行.图2FriendlyMachines公司的Robomow(RLIO00) Fig.2Robomow(RL1000)ofFriendlyMachinesCorp图3早期的RobomowFig.3EarlierageRobomowFriendlyMachines公司设计的FriendlyRobo—mow[(如图2,图3所示,图2为最新型号,图3为早第29卷第4期丛明等:智能割草机器人的研究综述期型号)是目前市场化最成功的智能割草机器人产品之一.该机器人(RLIO00)重约22kg,体积为89cm ×65cm×31.5cm,驱动电源为两枚24V,17Ah的免维护铅酸电瓶.Robomow采用三轮小车为本体,后轮用两个不同的直流电机驱动,前轮为起导向作用的万向轮,前端搭载了3个150W的高速电机控制割刀,能形成宽53cm左右的切割区域,Robomow割刀的最大特点是可将割下来的草茎粉碎成3mm以下的碎草沫,形成天然的肥料再释放回草坪中去,其具体结构参见图4.图4Robomow的底部结构Fig.4BottomofRobomowRobomow具备自主充电能力,每次充电大约可工作2.5~3h,能覆盖500m.左右的草坪,同时还具备防偷盗的辅助功能,部分型号还可以进行遥控操作.在Robodlow割草前,使用者需要用电缆将草坪边界,静止障碍物以及机器人不能进人的区域围起来(图5中的①),形成待工作区域,Robomow通过感应电缆中的电信号进行导航.当Robomow(图5中的②)探测到电缆后会反向运行,然后转过相应角度后正向运行,再次检测到电缆后重复以上过程,反复迂回运行于事先设定好的范围内.非电缆确定的障碍物(图5中的③)通过超声波传感器检测并简单绕行,但不能保证工作区域的全部遍历.Robomow的主要传感器为一个位于前端的超声波传感器以及一组排列在车体外缘的接触开关.其他的智能割草机器人产品也都与Robomow的工作原理类似,虽各有特色,但都是利用埋信号电缆的方式划定工作区域.图6为意大利Zucchetti公司生产的AmbrogioRobo—Lawnmower,体积为57×42 ×26ClTI.,采用了四轮结构,后两轮为驱动轮,前端为两个导向轮,支持锂电池,铅酸电瓶和自动充电,每次充电工作时间大约为2h,虽然它较Robomow要小一些,但却能支持3000m左右的草坪,割刀高度的调节范围为20~70mm.AmbrogioRobo—Lawnmower 最大的特点是带有雨水传感器和留有互连网接口.雨水传感器可以让机器人感知外界的天气变化,当下雨时自动返回到安全地点,以防止内部电路因潮湿而受损.互联网接口可为机器人提供远程服务,如进行远程故障诊断以及机器人内部软件远程升级等.此外,Zucchetti公司的产品还有Oscar割草机器人,如图7所示,它的性能指标和AmbrogioRobo—Lawnmower基本类似,区别在于Oscar型割草机器人体积更小,更适合于小型家庭草坪的修剪任务.图5Robomow的工作原理Fig.5HowdoesRobomowworks图6Zucchetti公司的AmbrogioRobo—Lawnmower Fig.6ZucchettiAmbrogioRobo—Lawnmower图7Zucchetti公司的Oscar(在充电仓内)Fig.7ZucchettiOscar(insidethecharger)4l0机器人2007年7月瑞典Electrolux也是比较早涉足割草机器人相关产品开发与研制的公司之一,图8为该公司生产的HusqvarnaAutoMower割草机器人.图8Electrolux公司的HusqvarnaAutoMowerFig.8ElectroluxHusqvarnaAutoMowerAutoMower割草机器人重约8.6kg,体积为71×60X26cm,支持自动充电,单次充电割草面积约为1800m,依靠一枚l8V,22Ah的智能锂电池供电.与wnmower类似,AutoMower采用了四轮结构的驱动,后两轮差动驱动,前两轮为万向导向轮.在AutoMower割草机器人上,Electrolux还采用了更多的适合于草坪切割作业的设计:带有齿状突起的大尺寸驱动轮可驱动AutoMower更可靠地在粗糙的草坪上行驶;AutoMower机器人外壳采用整体悬挂的安装方式,可以迅速捕捉到任何对外壳的碰撞信号;割草高度可直接通过机器人顶部调节等. 在Electrolux公司的Husqvarna品牌下,还有其他型号的智能割草机器人,功能上跟AutoMower基本类似,主要差别是在外形,最大爬坡角度,电池类型和驱动轮直径等方面.图9为Husqvarna另一型号的AutoMower,图l0为配备有太阳能电池板的HusqvarnaAutoMowerJ0].图9另~种型号的HusqvamaAutoMower¨g.9AnotherversionofHusqvamaAutoMower比利时Belrobotics公司生产的Bigmow是一种适用于修剪中型及大型草坪的割草.器人,见图11. Bigmow重约48kg,体积为120×120×50cm,通过一个24V,l5Ah的镍铬充电电池供能.Belrobotics公司还采用了24V的无刷直流电机和直径达450mm的驱动轮,以及5个24V,3200r/min的切割电机,使其更合适在大面积的草坪上作业.图l0带有太阳能电池板的HusqvamaAutoMower Fig.10HusqvarnaAutoMowerwithsolarcells图11Belrobotics公司的BigmowFig.11BelroboticsBigmow图l2俄亥俄大学的智能割草机器人Fig.12OhioUniversity'Sintelligentrobotmower除上述公司外,还有很多院校以及科研机构都积极展开了智能割草机器人的研究.图l2为美国俄亥俄大学研制的智能割草机器人样机.该机器人的整体框架为铝合金,利用两个直流电机驱动,速度约为16km/h,它共使用了3个微处理器,1个陀螺仪,支持远程控制和自动运行.机器人的导航系统的核心为差分全球定位系统(DifferentialGlobalPositio—ningSystem,DGPS),能精确地跟踪机器人在工作区第29卷第4期丛明等:智能割草机器人的研究综述411 间的位置¨.与传统的全球定位系统(GlobalPositio—ningSystem,GPS)相比,差分全球定位系统能将全球定位系统的信号通过已经精确测定位置的基准台再次修正,有效地削弱了各种误差,具有更高的精度,十分适合户外移动机器人的定位¨.凭借该机器人的出色表现,俄亥俄大学在2004年及2005年连续两次获得导航研究所年度自动割草机器人竞赛(Insti—tuteofNavigation'SAnnualAutonomousLawnMower Competition,ALMC)的冠军.其他参与比赛的还有伊利诺斯理工学院(I1T)和俄亥俄州迈阿密大学(MUO)等学校,其中liT的代表队获得了2005年自动割草机器人竞赛的亚军,而MUO的代表队则是2004年首届该竞赛的亚军.图13和图14分别为各个代表队的参赛样机.IIT的割草机器人采用了分体式设计,由中央移动单元和电动割草机两部分构成. 中央移动单元包括了运动及运动控制系统,传感系统,导航系统和电源,电动割草机紧固在中央移动单元上,接受控制命令及电源.MUO的割草机器人则采用了双能源的设计,割草机构通过汽油引擎驱动,而移动部分依靠电瓶驱动,电瓶可通过汽油引擎进行充电..图13liT的割草机器人Fig.13liT'srobotmower图14MUO的割草机器人Fig.14MUO'srobotmowerLawnNibbler(如图15)割草机器人是由佛罗里达大学机器智能实验室开发的,目前已经进入到了第3代的研究,主要的研究领域是实现具有自主学习能力的智能割草机器人,比如通过学习自动识别花,宠物等障碍和学习全区域覆盖策略等方面.图15佛罗里达大学的LawnNibblerFig.15FloridaUniversity'sLawnNibbler图16NREC的自动割草机Fig.16NREC'sautonomousmower针对大型高尔夫球场地草坪的修建,卡耐基?梅隆大学机器人研究所的国家机器人工程中心设计了一种大型的智能割草机器人,如图16所示,该机器人是由大型载人割草机改装而成的,添加了影像识别系统,中央控制计算机和全球卫星定位系统等自动化设备,实现了真正意义上的高效自动割草作业.2.2国内研究现状国内对于割草机器人的研究起步时间较晚,参与该领域的研究单位也比较少,但仍取得了一定的成果.南京理工大学机械学院设计了MORO型移动割孳机器人..''..见图17),并成功开发出了MORO—I,MORO—II等若干型割草机器人样机.南泉堙工大学412机器人2007年7月对割草机器人的总体设计(见图18),路径规划,避障,定位系统,控制系统等从理论上进行了较全面的讨论并提出了一种廉价实用的总体方案,还根据机器人动力学方程推导出驱动力矩的计算公式,为电机选择,控制系统硬件电路主要元器件参数选择提供了计算依据,为进一步深入研究割草机器人打下了基础.MORO型移动割草机器人的主要导航设备为驱动轮编码器和磁航向传感器,能自动生成无信标边界并在内进行全区域覆盖行走.该机器人的体积约为80X51x40cm,重约50kg,刀片的转速高达5000r/rain,适用于大面积草坪的修剪工作.此外,南京理工大学还将机器人领域的前沿技术引用到割草机器人上来,如基于Internet的机器人控制技术和太阳能草坪割草机关键技术18,19]等.图17南京理工大学的MORO移动割草机器人Fig.17MOROmowerrobotofNanjingUniversityofTechnology 图18MORO的机构简图Fig.18MORO'sframe图19江苏大学的割草机器人结构简图Fig.19MowerrobotofJiangsuUniversity与其他轮式割草机器人不同,江苏大学研制了一种履带式割草机器人,具有GPS定位导航的功能,能高效高速地进行作业,适用于大面积的草场区域.该机器人由两部分组成,一部分为广茂达公司生产的AS.RF履带式机器人,另一部分为自行设计的割草机台.此外,江苏大学还针对不同的草坪给出了合理的切割高度,这为割草机器人的研究提供了重要的依据.3研究方法(Researchapproaches)虽然割草机器人的研究平台有很多,国内外的科研机构在此领域也做出了大量的工作,并有部分的产品投放市场,但其中很多并没有达到完全自主运行的条件,割草的效果也不是十分理想,因此割草机器人的研究仍处于起步阶段0.但可以肯定的是,在众多科学家的共同努力下,近几十年来的积累已为割草机器人的研究形成了一整套的研究方法,具体体现在机械结构,传感系统和路径规划算法等几个方面的理论,对这些理论进行深入细致的研究能进一步促进割草机器人.f}勺发展J.3.1割草机器人的机械结构割草机器人的本体包括割草机器人车架体,车轮,减速器,驱动电机,蓄电池,传感系统,控制系统和割草机构等主要部分.对割草机器人进行合理的机械结构设计能为割草机器人在运行时提供可靠的稳定性,安全性和灵活性.整个割草机器人的机械结构又可分为两个方面:割草机器人的驱动机械结构和割草机器人的割草机构.3.1.1驱动机械结构设计割草机器人属于户外移动型机器人,针对该类型的机器人有各种驱动方案可供参考.根据户外移动型机器人的工作特点,文[23],[24]和[25]对户外自主移动机器人平台的驱动方案进行了详细的讨论.在文[23]和[24]中指出,户外移动机器人的运动方式有轮式,履带式和足式等多种.轮式和履带式驱动方式适用于较平整路面,而足式驱动方式适用于特殊的,条件相对恶劣的环境,也有的移动机器人为了适应各种路面将这几种驱动方式混合使用.割草机器人一般工作在条件较好的草坪上,结合其他工作要求,割草机器人大多选用轮式驱动方式.在文[25]中,又指出轮式驱动方式根据轮子数目又分三轮,四轮和六轮等几种.三轮方式结构比较简单,能够满足一般需要,应用也比较广泛,如图20中的(a),(b).四轮方式的稳定性好,承载能力比较大,但第29卷第4期丛明等:智能割草机器人的研究综述4l3 结构相对复杂,如图20中的(c),(d).六轮方式与四轮方式类似,具有更高的承载能力,稳定性和柔性,多用于未知环境的探测,如月球车和火星车等.根据转向方式的不同,轮式驱动方式又可分为铰轴转向式和差动转向式两种.铰轴转向式如图20中的(a),(c)所示,转向轮装在转向铰轴上,转向电机通过减速器和机械连杆机构控制铰轴从而控制转向轮的转向.差动转向式如图20中的(b),(d)所示,在车体两侧的驱动轮上装有不同的控制电机,通过两轮的速度比来实现车体的转向,在该情况下,非驱动轮应为自由的万向轮.在割草机器人中,这些机械结构均有采用,其中最典型的是三轮差动的驱动方式.该方式的优点是结构简单,运动灵活和能实现零半径转弯等,缺点在于实现两电机同步转动对电机的同轴度和控制系统的精度要求比较高.(b)(c)(d)图20移动机器人驱动方式的选择Fig.20Drivingmodeselectionofmobilerobot为了实现割草机器人预定的工作要求,还需要对割草机器人运动学的模型进行分析和讨论,以指导机械设计的过程,割草机器人的运动学模型也为割草机器人的仿真和路径规划提供了数学基础.本文将给出三轮差动这一典型割草机器人驱动模式的运动学模型.如图21所示,万向轮只对机器人起支撑作用,其对车体系统数学模型的影响可以忽略.以下为涉及的参数:图21车体系统运动学模型Fig.21Kinematicmodelofthevehiclesystemy[X,Y]:驱动轮轴心:智能机器人的角速度L:左驱动轮的速度:右驱动轮的速度:两个驱动轮间的距离车体的运动学模型:㈩』=(R+L)/2(2)【=(R一L)/L(1)式和(2)式相加得:r=cos=[(R+L)costh]/2{Y=vsinth=[(R+UL)sinth]/2(3)【击,:假设时间域为[0,t],各个变量的初始值分别为:,y,th,.,Yo,.,则(3)式的定积分公式为::.+旦dy:+d£(4)=.+d£将时间域[0,t]划分成足够小的子区间[0,t],414机器人2007年7月[t,t],…,[t一,t一],[t,t],每个区间作为一个控制周期.在每个时间区间[t一1,t],k=1,2,…, n,t.=0里,智能割草机器人运动学模型的定积分公式为::一+;f"(+)df一'k一1y㈩咖_l+.3.1.2割草机构设计割草机构是智能割草机器人的终端执行机构,用来进行草坪修剪作业,割草机构的设计直接关系到割草机器人性能.文[26]和[27]详细讨论了割草刀片在高速旋转时所产生气流的流场,分析了刀片运行时的模态,不平衡离心力和动态响应等参数.分析的结果为进行割草机器人的刀片及割草机构设计提供了重要的依据.文[21]和[28]提出了常见草坪的合理修剪高度,设计了具有高度调节功能的割草机台,同时该割草机台还设置了出草通道,以免发生草屑堵塞.设计割草机构时应当综合考虑实际需求.为了降低传统割草机的噪音和废气污染,割草机构的驱动能源多为电能,这就要求割草刀片在工作时尽量不要发生卡死,锁紧等现象,以避免烧毁电机及驱动电路.由于割草刀片处于高速运转状态,还应考虑刀片及电机的散热问题.此外,家庭用割草机器人要特别注意刀片的安全性,应严格依照文[29]设计,充分考虑潜在的危险,以使其对人体及其他动物的伤害降至最低.3.2传感系统割草机器人属于典型的户外移动机器人,工作时将处于非结构化空间内.割草机器人要检测固定的和移动的障碍物,获取自身的运行参数(如坐标,方向,速度和加速度等信息),用于判断潜在的危险,并决定相应的对策.因此,割草机器人必须具备一个完备的传感系统.由于户外移动机器人技术已有多年的经验积累,所以很多成熟技术可供割草机器人采用.另外,一些正在发展的新技术也逐渐引入到割草机器人领域中来.通常,割草机器人装备的传感器有超声波传感器,红外线传感器,视觉传感器,金属探测器,光电码盘和人体热释传感器等.超声波传感器的探测范围为10cm~3m,红外线传感器的测试范围为5mm~80cm,由于都属于反射式距离传感器,将两者结合可以测量机器人与障碍物之间的距离.值得指出的是, 在户外环境工作时,超声波的速率往往会受到温度的影响,因此暴露于户外的超声波传感器需要利用温度传感器对输出的结果进行补偿,在文[32]中指出了一种高精度超声波传感器的数据补偿方法.视觉传感器也可作为测距元件,但与其它测距传感器相比,视觉传感器还能识别各种复杂的移动物体(包括人和车辆等),建立工作空间模型,更能让遥控操作变得更直观,但是视觉传感器要与图形处理算法结合才更有效.文[33]就介绍了一种割草机器人的视觉算法,用于生成工作区域地图和检验割草效果. 在利用埋入地下的金属导线作为工作区域界限标识的情况下,采用金属探测器进行边界检测.光电码盘可检测割草机器人的运行速度,加速度及角加速度等参数,利用这些信息可实现机器人运动的闭环控制.人体热释传感器是通过接收人体释放的热量对行动的个人进行识别的元件,通过特殊的调节还可用于动物的识别.随着科技的发展,一些先进的导航技术也正逐渐延伸到民用机器人领域.例如,文[34]中的割草机器人的传感系统采用了GPS技术,通过检测卫星的信号来确定割草机器人在工作区间中的具体位置. 文[35]中更是利用添加基站的DGPS技术提高了割草机器人在工作区间内的定位精度.值得注意的是,这些采用外界定位系统辅助的割草机器人都需要搭载网络通讯设备,已经超出了传统的单机机器人的概念.另外,一些高端的玩具和模型上使用的感测元件也可以应用在割草机器人上,如电子罗盘,惯性计和多通道遥控平台等,这些元件由于产量相对较大,成本也相应低一些,替换起来也很方便.总之,在设计割草机器人传感系统时应当充分考虑预算,实际需求和工作状况等条件,使整个系统达到最优配置. 3.3全区域覆盖路径规划为了实现割草机器人的预定功能,需要对割草机器人的路径进行全区域覆盖规划.所谓全区域覆盖路径规划(CompleteCoveragePathPlanning,CCPP)是指对机器人的路径进行规划,使其完全覆盖工作环境中所有无障碍的区域l3.根据不同的策略,全区域覆盖路径规划又可分为随机路径规划和非随机路径规划两种.其中,基于环境地图的全区域覆盖路径规划是割草机器人路径规划中的研究重点和难点.第29卷第4期丛明等:智能割草机器人的研究综述4l5 采用随机移动路径规划的机器人不需要对环境有预先的了解,公平对待整个区域,主观上不愿意遗漏对任何局部区域的覆盖.文[36]采用的方式是让机器人直线行进,当机器人遇到障碍物时向后随机转一个角度,然后继续直线进行.由于该规划方式不需要特殊的算法,实现非常简单,更不需要机器人附加特殊的导航设备,所以在市场化的割草机器人产。
割草机器人调研报告
割草机器人调研报告哎呀,要说这割草机器人啊,还真是个新鲜玩意儿。
最近我可是对它好好研究了一番。
我先去了几个大公园,想看看这些地方有没有用上割草机器人。
嘿,还真让我碰上了!在一个阳光明媚的周末,我来到了市中心的大公园。
一进去,就听到“嗡嗡嗡”的声音,顺着声音望去,只见一个小巧玲珑的家伙在草地上欢快地跑着,可不就是割草机器人嘛!它的样子有点像个小型的坦克,圆滚滚的身子,下面带着几个灵活的轮子,上面还有个像小帽子一样的盖子。
我好奇地凑近看,发现它的“嘴巴”那里有一排锋利的刀片,正快速地转动着,把草割得整整齐齐。
这割草机器人工作起来可认真了!它沿着设定好的路线,有条不紊地前进,碰到障碍物就会自动转弯或者避开。
不像人工割草,有时候会这儿多割一点,那儿少割一点。
而且啊,它工作的时候声音也不大,不会像那种大型割草机一样吵得人头疼。
我还和公园的管理员聊了聊。
他跟我说,这割草机器人可帮了他们大忙了!以前人工割草,得好几个工人忙上大半天,现在有了这小家伙,轻松多了。
而且它还能根据不同的草的高度和密度,自动调整割草的速度和力度,真是聪明得很!我又去了几个小区,发现也有不少人家用上了割草机器人。
有个住户跟我抱怨说,以前自己割草,累得腰酸背痛的,现在有了这机器人,他可以坐在阳台上喝着茶,看着机器人干活,轻松又惬意。
不过,割草机器人也不是完美无缺的。
比如说,它的价格可不便宜,一般的家庭可能会觉得有点贵。
而且,如果草地的面积太小或者形状太不规则,它的作用就不太能发挥出来。
还有就是,万一它出了故障,维修起来也有点麻烦。
但是总体来说,割草机器人的优点还是很突出的。
它不仅节省了人力,提高了割草的效率和质量,还能让人们从繁琐的割草工作中解放出来,享受更多的休闲时光。
我想啊,随着技术的不断进步,割草机器人肯定会越来越普及,价格也会越来越亲民。
说不定以后,家家户户的院子里都能有这么一个勤劳的“小帮手”呢!经过这一番调研,我对割草机器人有了更深入的了解。
我国有哪些农业机器人

我国有哪些农业机器人随着科技的不断发展,农业机器人在中国的使用越来越普遍。
农业机器人可以提高农业生产的效率和质量,减少人力资源的消耗和环境污染,对农业的发展起到了积极的推动作用。
目前,我国的农业机器人种类较多,下面主要介绍一些常见的农业机器人。
1. 智能拔草机器人智能拔草机器人是一种针对田间作物拔草的机器人,它适用于小麦、玉米、棉花等庄稼和蔬菜等作物的拔草工作。
它能够自动识别作物和杂草,并通过数学算法实现拔草,同时也具备智能导航和自主行驶的功能,大大提高了作业效率和作业质量。
2. 植保无人机植保无人机是一种搭载喷雾器进行植物病虫害防治的机器人,它可以自主飞行、自动喷雾、自动回航。
采用植保无人机喷洒农药,不仅可以减轻劳动强度,提高工作效率,还可以精确喷洒,减少农药的使用量和环境污染。
3. 清洗采摘机器人清洗采摘机器人是一种专门用于采摘水果、蔬菜和清洗的机器人,它能够自动识别不同种类的水果和蔬菜,并将其采摘下来。
采摘完成后,清洗采摘机器人还可以将采摘下来的作物进行清洗、分类和包装,减轻劳动强度,提高作业效率和作业质量。
4. 田间注水机器人田间注水机器人是一种专门用于灌溉田地的机器人。
它可以自主巡航,实现按时间、按条件灌溉,同时它还可以实现精准测量土壤水分和植物需水量,减少水的浪费。
田间注水机器人的应用提高了农作物产量和质量,节省了水资源。
智能割草机器人是一种自动化的割草机器人,它能够感知沿途的障碍物,并自动避让,能够在范围内自由行走割草。
智能割草机器人的应用,可以高效、便捷、安全地完成割草作业,减轻劳动强度,提高作业效率和作业质量。
总之,农业机器人将成为未来农业生产的重要组成部分。
随着科技的不断进步,我国的农业机器人将会更加丰富和多样化,为农业生产提供更好的保障。
2024年割草机器人市场环境分析
2024年割草机器人市场环境分析一、市场概况割草机器人是一种自动化设备,用于代替人工割草。
随着生活水平的提高,人们对生活品质的要求也越来越高,这促使了割草机器人市场的发展。
割草机器人市场是一个新兴的市场,具有较大的潜力和发展前景。
本文将对割草机器人市场的环境进行分析。
二、市场规模分析割草机器人市场目前还处于初级阶段,但整体市场规模呈现增长趋势。
据统计数据显示,全球割草机器人市场规模已经超过1亿美元,并呈现稳定增长。
预计在未来几年内,全球割草机器人市场规模将进一步扩大。
三、市场竞争分析割草机器人市场存在激烈的竞争,主要品牌包括Robomow、Husqvarna、Honda 等。
这些品牌拥有丰富的经验和强大的研发实力,与此同时,新进入市场的厂商也在不断涌现,市场竞争日趋激烈。
市场竞争主要体现在产品性能和品质上。
割草机器人的性能越好、功能越全面,越能吸引消费者的注意。
同时,产品的可靠性和耐用性也是消费者选择的重要因素。
四、用户需求分析割草机器人的主要用户群体包括个人家庭和公共场所,如公园、高尔夫球场等。
个人家庭用户追求的是便捷性和舒适性,希望通过割草机器人节省时间和精力。
公共场所用户重视效率、维护成本和环保性能。
消费者对割草机器人的需求主要集中在以下几个方面:1.自动化程度:消费者希望割草机器人能够实现自动化操作,无需人工干预。
2.安全性:消费者关注割草机器人的安全性能,希望能够通过各种传感器来避免意外伤害。
3.操控性:消费者希望割草机器人易于操作和操控,界面简洁清晰。
4.节能环保:消费者越来越重视割草机器人的能源消耗和环境保护性能。
五、市场发展趋势割草机器人市场发展趋势主要集中在以下几个方面:1.技术升级:随着科技的发展,割草机器人的技术将不断升级,实现更高的自动化程度和智能化操作。
2.产品个性化:消费者对割草机器人的需求越来越多样化,厂商将不断推出不同类型和款式的产品,以满足不同消费群体的需求。
3.价格下降:随着市场竞争的加剧和生产技术的提升,割草机器人的价格将逐渐下降,更多消费者将能够承担购买成本。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动割草机器人
现在,越来越多的家庭开始使用自动割草机器人来帮助他们缩
短园艺时间,降低对草坪的维护成本,同时也减轻了他们的体力
活负担。
在这篇文章里,我将探讨一下自动割草机器人的一些优
点和缺点,以及它们在未来可能的发展方向。
优点:
1.可靠性高:自动割草机器人能够在雨天和各种天气条件下正
常工作,并保持一致的割草效果。
这些机器人需要的维护也很少,不需要定期更换零部件或进行复杂的保养。
2.舒适性高:使用自动割草机器人的最大好处就是它们可以代
替我们手动割草,避免了弯腰和弯曲等体位对身体的伤害。
它们
还可以在没有人看管的情况下完成工作,这意味着我们可以节省
大量的时间和精力。
3.环保:通过使用自动割草机器人,我们可以减少对环境的损害。
不仅减少了使用化学草料的需求,还降低了废气和甲烷气的
排放数量。
4.安全性高:这些机器人内置了各种安全特性,例如防倾倒、
自动停机、红外线探测和超声波反射器等。
它们还可以使用互联
网连接到我们的智能手机或平板电脑,从而实现远程监控和控制。
缺点:
1.价格昂贵:与一般的割草机相比,自动割草机器人的价格通
常要高出数百美元。
这对于那些预算有限的家庭而言可能不太合适。
2.需定期清理集草箱:由于自动割草机器人的底部是开放的,
所以在杂草多的草坪上或经常割草的情况下,集草箱很快就会堵塞,需要我们花费额外的时间和精力进行清理。
3.对景观造成影响:由于割草高度是固定的,自动割草机器人
割草时很难分辨出园艺杂草和开花植物等,这可能影响到我们的
庭院美观度和植物的健康状况。
未来发展方向:
未来的自动割草机器人将更加智能化,它们将会搭载更强大的
电子芯片和传感器设备,从而能够更好地适应各种天气条件和草
坪形状。
此外,未来的自动割草机器人还可以搭载更多种的工具,例如太阳能充电板、蚊香炉、电动车充电输出和开花植物识别等。
总结:
尽管自动割草机器人有一些优点和缺点,但是它们仍然是一种
十分有用的工具,能够帮助我们更好地管理庭院和园艺杂草,节
省时间和精力。
随着技术的发展,我们可以期待着更多的智能化
与高效化的自动割草机器人的出现,从而更好地帮助我们打理庭
院与园艺。