单片机初始化基本程序
松翰单片机 SN8F5702程序例程

#include <stdio.h>#include "SN8F5702.h"#include <intrins.h> // for _nop_void InitCPU(void); //单片机初始化void Ram_init(void); //全局变量赋值void Time_Fun(void); //基准走时函数void SYSIspStart(unsigned int pageAddress);//----------------------字节全局变量-------------------------------u8 idata ISP_RAM[32] ; // IRAM 0xE0 to 0xFF#define WenDu_Up ISP_RAM[1]#define WenDu_Down ISP_RAM[2]#define WenDu_Cha ISP_RAM[3]// u8 WenDu_Up;// u8 WenDu_Down;u8 WenDu_HJ;u8 ADC_WenDu_HJ;u8 AD_key;u8 Time_500ms_Cnt;u8 Temp_ChaZhi_ID;//0显示环境温度,1显示差值闪烁u8 SS_500Ms_Cnt;//500ms闪烁标志位u8 IAP_Save_Cnt;//存储标志位//--------------------位全局变量-----------------------------------bit TimeFlag ;//定时标记bit Buzz_Flag ;//蜂鸣器标志位bit SS_500Ms_Flag ;//500ms闪烁标志位bit ZiDong_ShouDong_Flag;//自动手动标志位bit ShouDong_Out_Flag;//手动输出标志位bit IAP_Save_Flag;//存储标志位bit NTC_Error_Flag;//传感器错误bit NTC_OK_Flag;//传感器错误u8 code ISP_ROM[32] _at_ 0X0200;//****************************************************************** #define ADC_GLOBAL#include "..\inc\config.h"/*****************************************************************/ #define AD_DATA_CNT 250const u16 code TEMP_AD_DATA[AD_DATA_CNT+1]={3138 , // 03100 , // 13061 , // 22982 , // 4 2941 , // 5 2899 , // 6 2857 , // 7 2815 , // 8 2771 , // 9 2728 , // 10 2684 , // 11 2639 , // 12 2595 , // 13 2550 , // 14 2504 , // 15 2459 , // 16 2413 , // 17 2367 , // 18 2321 , // 19 2276 , // 20 2230 , // 21 2184 , // 22 2139 , // 23 2093 , // 24 2048 , // 25 2003 , // 26 1959 , // 27 1914 , // 28 1870 , // 29 1827 , // 30 1784 , // 31 1741 , // 32 1699 , // 33 1658 , // 34 1617 , // 35 1577 , // 36 1537 , // 37 1498 , // 38 1459 , // 39 1421 , // 40 1384 , // 41 1348 , // 42 1312 , // 43 1277 , // 44 1243 , // 45 1209 , // 461144 , // 48 1112 , // 49 1082 , // 50 1052 , // 51 1022 , // 52 994 , // 53 966 , // 54 938 , // 55 912 , // 56 886 , // 57 861 , // 58 836 , // 59 812 , // 60 789 , // 61 766 , // 62 744 , // 63 723 , // 64 702 , // 65 682 , // 66 662 , // 67 643 , // 68 624 , // 69 606 , // 70 589 , // 71 572 , // 72 555 , // 73 539 , // 74 524 , // 75 509 , // 76 494 , // 77 480 , // 78 466 , // 79 453 , // 80 440 , // 81 427 , // 82 415 , // 83 403 , // 84 392 , // 85 381 , // 86 370 , // 87 360 , // 88 349 , // 89 340 , // 90330 , // 91321 , // 92312 , // 93303 , // 94295 , // 95287 , // 96279 , // 97271 , // 98264 , // 99};void AD_fun(void) //{static u8 AD_Sum_Cnt = 0,AD_ID=0;static u16 AD_Sum = 0;static u8 Temp_Change_Cnt=0;u8 i;AD_Sum += Get_ADC(AD_ID);AD_Sum_Cnt ++;if(AD_Sum_Cnt >= 8){AD_Sum_Cnt = 0;AD_Sum >>= 3;if(1){if(!AD_ID){if(AD_Sum<40||AD_Sum>4050){NTC_Error_Flag = 1;}else{NTC_Error_Flag = 0;}AD_ID=1;}}AD_Sum = 0;}}u16 Get_ADC( uchar n){u16 dat;//dat = 0;if(!n){ADM = _1000_0000b;//AIN0通道}else if(n==1){ADM = _1000_0110b;//AIN6通道}else if(n==2){ADM = _1000_0111b;//AIN7通道}else if(n==3){ADM = _1000_1000b;//AIN8通道}_nop_();_nop_();ADM |= _0100_0000b; //开始转换while(!(ADM & _0010_0000b)); //转换中_nop_();_nop_();ADM &= _1101_1111b;dat = ADB;dat <<= 4;dat += (ADR&0x0f);_nop_();_nop_();return dat;}void SYSIspStart(unsigned int pageAddress){ISP(pageAddress, ISP_RAM);}/***************************************************************硬件初始化函数: 硬件初始化输入输出定时器开关AD初始化****************************************************************/void InitCPU(void) //单片机初始化{EAL=0; //关总中断CLKSEL = _0000_0101b;//内部32MRC Fhosc/4 分频CLKCMD = 0x69;//时钟开关启动CKCON = _0011_0001b;//------------------------------I/O口输出--------------------------//---------------P0---------------P0M=_1111_1111b; //P07=BUZZ P06=COM6 P05=COM5 P04=COM4P0UR = _0000_0000b; //P03=COM3 P02=COM2 P01=COM1 P00=LED1P0 = _0000_0000b;//---------------P1---------------// P1W = _0000_1000b;P1M=_0011_1110b; //P17=ADC7 P16=ADC6 P15=LED2 P14=?P1UR = _0000_0000b; //P13=? P12=? P11=? P10=ADC0_温度P1 = _0000_0000b;//---------------P2---------------P2M=_1111_1101b; //P27=? P26=? P25=? P24=?P2UR = _0000_0000b; //P23=? P22=? P21=ADC6 P20=REY_OUTP2 = _0000_0000b;//------------------------------INT--------------------------------// PEDGE |= 0x03; // EX0G 电平变换触发,双沿// EX0 = 1; // INT0 isr enable// PEDGE |= 0x04; // EX1G = 0x01 : INT1 Rising edge trigger// EX1 = 1; // INT1 isr enable//// PEDGE |= 0x30; // EX1G = 0x11 : Both rising and falling edge trigger (Level change trigger).// IEN4 |= 0x40; // INT2 isr enable (EX2)//====================PWM1设置======================// PW1M = _1010_0000b;// PW1CH = _0001_0000b;// PW1YH = 0;// PW1YL = 26;// PW1DH = 0;// PW1DL = 7;// PW1A = 5;// PW1B = PW1D;//------------------------------T0--------------------------------TMOD = _0110_0110b; // T0 T1 8位自动装载TH0 = 131; // Initial valuesTL0 = 131;TCON0 = _0010_0011b; // T0 = Fhsoc/32. T1 = Fhsoc/16ET0 = 1; // Timer 0 isr enableTR0 = 1; // enable Timer 0 Run control//------------------------------T1--------------------------------TH1 = 6; // Initial valuesTL1 = 6;ET1 = 0; // Timer 1 isr enableTR1 = 0; // enable Timer 1 Run controlIP0 = _0000_1000b;IP1 = _0000_1000b;//----------------------AD配置--------------------------------------//----------------------AD配置--------------------------------------ADM = _1000_0000b; //AIN3通道ADR = _0101_0000b;// [ADR.5 ADR.4]00 = Fhosc/16, 01 = Fhosc/8, 10 = Fhosc/1, 11 = Fhosc/2VREFH = _0000_0011b; //参考电压VDDP1CON = _1100_0001b;P2CON = _0000_0010b;//------------------------------------------------------------------EAL=1; //开总中断}void Ram_init(void){u8 i;NTC_OK_Flag=0;//NTC 测温OK后才继电器开始工作WenDu_Up=30;WenDu_Down=20;WenDu_HJ=25;Temp_ChaZhi_ID=0;//0显示环境温度,1显示差值闪烁_clrwdt();for(i=0;i<20;i++){ISP_RAM[i]=ISP_ROM[i];}_nop_();_nop_();if(ISP_RAM[0]==0x55){if(WenDu_Up>99||WenDu_Down>99||WenDu_Cha>18){ISP_RAM[0]=0x55;ISP_RAM[1]=30;ISP_RAM[2]=20;ISP_RAM[3]=9;_clrwdt();SYSIspStart(0X0200);}}else{ISP_RAM[0]=0x55;ISP_RAM[1]=30;ISP_RAM[2]=20;ISP_RAM[3]=9;_clrwdt();SYSIspStart(0X0200);}_nop_();_nop_();}//*****************************************************************// // 主函数////*****************************************************************// void main(void){u8 i;InitCPU();i=200;while(i){i --;_clrwdt();Ram_init();while(1){if(TimeFlag){TimeFlag=0;Time_Fun(); //基准时间函数}_clrwdt();_nop_();}}//*****************************************************************//// 时间走时函数////*****************************************************************//void Work_Fun(void){}//*****************************************************************//// 时间走时函数////*****************************************************************//void Time_Fun(void){static u8 Time_4ms_Cnt = 0,Time_10ms_Cnt = 0,Time_100ms_Cnt = 0,Time_250ms_Cnt = 0;static u8 Buzz_Cnt=0;//***************充放电判断*********************LedDisplay();Time_4ms_Cnt ++;if(Time_4ms_Cnt>=2){Time_4ms_Cnt=0;AD_fun();}Time_10ms_Cnt ++;if(Time_10ms_Cnt>=5){Time_10ms_Cnt=0;KeyDataProcess();}Time_100ms_Cnt++;if(Time_100ms_Cnt>=50){Work_Fun();Time_100ms_Cnt=0;}}//*****************************************************************// // 中断函数// //*****************************************************************// void Timer0_ISR(void) interrupt ISRTimer0 // Vector @ 0x0B{static u8 Time2MS = 0;Time2MS ++;if(Time2MS >= 16) //2MS中断函数{Time2MS = 0;TimeFlag = 1;}if(Buzz_Flag)BUZZ=!BUZZ;elseBUZZ=0;//***************************************}void Timer1_ISR(void) interrupt ISRTimer1 // Vector @ 0x1B{;}。
单片机初始化过程
单片机初始化过程-概述说明以及解释1.引言1.1 概述单片机是一种集成了中央处理器、存储器和输入/输出设备的微型计算机系统。
在单片机的使用过程中,初始化是非常重要的一个步骤。
它涉及到对单片机硬件及软件的一系列设置和配置,确保单片机能够正常工作。
本文将从单片机初始化的概念、步骤和重要性进行探讨,并对未来单片机初始化的发展趋势和展望进行分析。
通过对单片机初始化过程的深入理解,可以更好地在实际应用中利用单片机的功能,提高系统性能和稳定性。
文章结构部分的内容如下:1.2 文章结构本文主要分为三个部分,即引言、正文和结论。
引言部分将介绍单片机初始化过程的概述,文章结构和目的,以便引起读者的兴趣和理解文章的主题。
正文部分将详细介绍单片机初始化的概念、步骤和重要性,帮助读者全面了解单片机初始化的过程和作用。
结论部分将总结单片机初始化的关键点,探讨单片机初始化的发展趋势和未来展望,为读者提供一个对单片机初始化过程的全面思考和理解。
通过这样的文章结构,读者可以系统地了解单片机初始化的全貌,深入思考单片机初始化的重要性和未来发展趋势,从而更好地应用和理解单片机初始化过程。
1.3 目的本文旨在深入探讨单片机初始化过程,介绍单片机初始化的概念、步骤以及其重要性。
通过对单片机初始化的详细解析,读者可以更好地理解单片机初始化的关键点,认识到单片机初始化在嵌入式系统设计中的重要作用。
同时,本文也将展望未来单片机初始化的发展趋势,为读者提供对未来单片机初始化技术的深入认识和思考。
通过本文的阅读,读者可以获取关于单片机初始化的全面知识,以便在实际应用中更加灵活和有效地进行单片机初始化工作。
2.正文2.1 单片机初始化的概念单片机初始化是指在单片机系统通电或复位时,系统从初始状态切换到可以正常工作状态的过程。
在单片机初始化过程中,系统需要进行一系列的设置和配置,以确保单片机可以正确地运行用户程序。
这个过程包括对各种硬件模块和外围设备进行初始化配置,如串行通信口、定时器、中断控制器等。
单片机初始化函数
单片机初始化函数
单片机初始化函数是用于配置单片机内部组件和外部接口的函数。
在编写单片机程序时,通常需要编写一个或多个初始化函数,以确保单片机能够正常运行。
单片机初始化函数的实现方式因单片机的不同而有所差异,但一般都需要完成以下任务:
1. 配置时钟系统:根据单片机的时钟源和频率,配置单片机的时钟系统,以确保单片机能够正常工作。
2. 配置存储器:根据程序的需求,配置单片机的内部或外部存储器,例如RAM、Flash等。
3. 配置I/O接口:根据程序的需求,配置单片机的输入输出接口,例如GPIO、UART、SPI等。
4. 配置定时器:根据程序的需求,配置单片机的定时器,例如计数器、PWM等。
下面是一个示例的单片机初始化函数的实现方式:
```c
void init_mcu(void) {
// 配置时钟系统
clock_config(8000000); // 假设时钟频率为8MHz
// 配置存储器
flash_init(); // 初始化Flash存储器
ram_init(); // 初始化RAM存储器
// 配置I/O接口
gpio_init(); // 初始化GPIO接口
uart_init(); // 初始化UART接口
spi_init(); // 初始化SPI接口
// 配置定时器
timer_init(); // 初始化定时器
}
```
需要注意的是,上述示例只是一个简单的示例,实际的单片机初始化函数的实现方式可能会更加复杂,具体取决于单片机的型号和程序的需求。
单片机串口初始化程序

单片机串口初始化程序1.引言1.1 概述概述:单片机串口(Universal Asynchronous Receiver/Transmitter,简称UART)是一种常见的通信接口,可以通过串口与其他设备进行数据的传输和通信。
在单片机系统中,串口的初始化是非常重要的步骤,它不仅决定了串口通信的可靠性和稳定性,还影响了单片机整体系统的性能和功能。
本文将详细介绍单片机串口初始化的程序,包括串口的基本概念、串口初始化的重要性以及实现串口初始化的方法。
通过阅读本文,读者将了解到串口初始化的必要性,了解如何在单片机系统中进行串口初始化,从而为后续的串口通信提供完善的基础。
在正式进行串口初始化之前,我们需要先了解串口的基本原理和工作原理。
串口是一种异步的通信接口,它使用起停位、数据位、校验位和波特率等参数来进行通信。
单片机通过串口与外部设备进行数据的传输和接收,可以实现与计算机、传感器、LCD显示屏等设备的数据交互。
串口初始化的重要性不容忽视。
在单片机系统中,串口通常用于与其他设备进行数据的传输和通信。
如果串口初始化不正确或不完善,可能会导致数据传输错误、通信失败甚至系统崩溃。
因此,正确地初始化串口成为了保证系统正常运行和稳定通信的关键步骤。
针对串口初始化,本文将介绍一种常用的实现方法。
这种方法需要设置串口的参数,包括波特率、数据位、校验位和停止位等。
同时,还需要配置单片机的引脚和时钟等相关参数,使其能够正确地与外部设备进行串口通信。
本文将通过代码实例的方式,详细介绍串口初始化的具体步骤和方法,供读者参考和借鉴。
总之,本文将全面介绍单片机串口初始化的程序。
通过此文,读者将深入了解串口的基本概念和工作原理,认识到串口初始化的重要性,并学习到一种常用的串口初始化实现方法。
希望本文能为读者提供有益的知识和帮助,为单片机系统的开发和应用提供参考和指导。
1.2文章结构1.2 文章结构本文旨在介绍单片机串口初始化程序的相关知识和实现方法。
单片机程序复位

单片机程序复位
在单片机系统中,程序复位是指将整个系统重新启动。
程序复位后,所有的寄存器和变量将被清零,CPU开始按照规定的顺序执行复位向量地址处的代码。
当单片机系统出现故障或需要重新启动时,程序复位是必要的。
例如,当程序发生意外错误导致系统崩溃时,或者需要重新初始化某
些重要寄存器或变量时,程序复位是最常用的解决方案。
此外,在调
试或测试单片机系统时,程序复位也是一个常见的操作。
在单片机系统中,程序复位通常通过两种方式实现:硬件复位和
软件复位。
硬件复位是通过物理重置单元或通过外部复位信号来实现的,它可以迫使系统立即停止执行以前的任务,并重新开始执行初始
化代码。
软件复位是通过在程序中插入一条特殊的复位指令来实现的,它通常用于特殊的初始化任务或临时测试。
程序复位虽然是一个简单的操作,但是需要注意的是在进行程序
复位时,所有的寄存器和变量将被清零,可能会导致系统处于不稳定
的状态。
因此,在程序复位之前,应该先保存现场状态,确保系统能
够正常恢复。
同时,也需要根据具体需求选择何时进行复位,在程序
编写过程中尽量避免出现需要频繁进行复位的情况。
总之,程序复位是单片机系统中非常重要的一个操作,它能够帮
助我们解决许多问题并提高系统的稳定性。
因此,在单片机开发过程中,我们应该对程序复位有充分的了解和掌握。
单片机数字电压实训报告

一、实训目的1. 掌握单片机的基本原理和操作方法。
2. 学会使用单片机进行数字电压的测量。
3. 熟悉数字电压表的硬件电路设计和软件编程。
4. 提高动手实践能力和问题解决能力。
二、实训内容1. 数字电压表概述数字电压表(Digital Voltmeter,简称DVM)是一种将模拟电压信号转换为数字信号的测量仪器。
它具有测量精度高、读数直观、易于操作等优点,广泛应用于电子测量、工业自动化、科学研究等领域。
2. 硬件电路设计(1)单片机选型:选用AT89C51单片机作为核心控制器,具有丰富的片上资源,满足数字电压表设计需求。
(2)模数转换器(ADC)选型:选用ADC0809模数转换器,具有8路模拟输入端口,可实现8路电压信号的采集。
(3)电压输入电路设计:设计多路电压输入电路,包括电压分压、滤波等,确保输入电压信号稳定、准确。
(4)显示模块选择:选用LCD1602液晶显示屏,可实时显示采集到的电压值。
3. 软件设计(1)初始化程序:设置单片机工作模式、波特率、中断等参数,初始化ADC0809和LCD1602。
(2)ADC采集程序:通过单片机控制ADC0809进行电压信号的采集,将模拟电压信号转换为数字信号。
(3)数据处理程序:对采集到的数字电压信号进行处理,计算实际电压值。
(4)显示程序:将计算得到的电压值显示在LCD1602上。
4. 调试与测试(1)硬件调试:检查电路连接是否正确,元器件是否损坏,确保电路正常工作。
(2)软件调试:使用Keil软件进行程序编译、仿真和调试,确保程序运行正确。
(3)功能测试:通过实际测量,验证数字电压表的功能是否满足设计要求。
三、实训结果与分析1. 测量精度通过实际测量,数字电压表在0~5V范围内具有较高的测量精度,最小分辨率为0.019V,误差约为±0.02V。
2. 测量速度数字电压表具有较快的测量速度,可在短时间内完成电压信号的采集、处理和显示。
3. 稳定性和可靠性数字电压表电路设计合理,元器件选用合格,具有较强的稳定性和可靠性。
STC单片机EEPROM读写程序
STC单片机EEPROM读写程序在单片机中,EEPROM(Electrically Erasable Programmable Read-Only Memory)是一种非易失性存储器,可以用于存储数据,即使在断电情况下,数据也会被保留。
因此,掌握STC单片机的EEPROM读写程序对于开发嵌入式系统非常重要。
一、EEPROM简介EEPROM是一种可重复擦写的存储器,可用于存储小量数据。
与Flash存储器相比,EEPROM具有更快的写入和擦除速度。
在STC单片机中,EEPROM的存储容量通常较小,一般在几个字节到几千字节之间。
二、EEPROM读操作在STC单片机中,进行EEPROM读操作需要按照以下步骤进行:1. 初始化I2C总线:STC单片机使用I2C总线进行EEPROM读写操作,因此需要先初始化I2C总线。
通过设置相关寄存器,设置I2C 总线的速度和地址。
2. 发送设备地址:确定要读取的EEPROM设备的地址,并发送到I2C总线。
3. 发送寄存器地址:确定要读取的EEPROM寄存器地址,并将其发送到I2C总线。
4. 发送读命令:向EEPROM发送读命令,以启动读操作。
5. 读取数据:从EEPROM中读取数据,并保存到变量中。
6. 结束读操作:完成读操作后,关闭I2C总线。
三、EEPROM写操作类似于读操作,进行EEPROM写操作也需要按照一定的步骤进行:1. 初始化I2C总线:同样地,首先需要初始化I2C总线。
2. 发送设备地址:确定要写入的EEPROM设备的地址,并发送到I2C总线。
3. 发送寄存器地址:确定要写入的EEPROM寄存器地址,并将其发送到I2C总线。
4. 发送写命令:向EEPROM发送写命令,以启动写操作。
5. 写入数据:将要写入EEPROM的数据发送到I2C总线。
6. 结束写操作:完成写操作后,关闭I2C总线。
四、注意事项在进行EEPROM读写操作时,需要注意以下几点:1. 确保正确的设备地址:要与EEPROM的地址匹配,否则无法进行有效的读写操作。
C8051F020单片机初始化
C8051F020单片机初始化程序和编译步骤2011-02-15 12:20:06| 分类:默认分类| 标签:|字号大中小订阅C8051F020编程步骤一、编程步骤:1、看门狗设置2、系统初始化3、端口初始化4、对应功能初始化(如:串口,定时器,I2C,SPI,PCA,DAC/ADC,中断等等)5、功能函数或中断函数(如需要)6、包含的头文件7、项目说明二、对应功能初始化要点:1、Uart:(1)串口工作模式由SCON设定(2)定时器工作方式设定TMOD (3)波特率TH载入值设定(4)启动TR1 (5)时钟基准CKCON (6)波特率加倍设定PCON(7)开中断使能TI2、Time:(1)工作方式设定TMOD (2)定时器时钟基准CKCON (3)启动/停止TCON设定TRn3、Interrupt:(1)中断允许IE (2)触发方式设定(上下沿,电平)(3)对应控制位允许设定,如ES串口允许C8051F020单片机初始化程序; $INCLUDE (C8051F020.inc) /C8051F020单片机功能强大,初始化也比较繁杂,为了便于初始化各功能模块,我们编了此程序可看着“说明”初始化。
ORG SYS_INIT;※▲◆●◎★☆△;◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆;■-- <1> --电源管理; PCON ; POWER CONTROL;■-- <2> --系统时钟和振荡器; OSCXCN ; EXTERNAL OSCILLATOR CONTROL; OSCICN ; INTERNAL OSCILLA TOR CONTROL;■-- <3> --复位及看门狗管理; RSTSRC ; RESET SOURCE; WDTCN ; WA TCHDOG TIMER CONTROL;■-- <4> --FLASH存储器编程和安全管理; FLSCL ; FLASH MEMORY TIMING PRESCALER; PSCTL ; PROGRAM STORE R/W CONTROL; FLACL ; FLASH ACESS LIMIT;■-- <5> --中断控制; IE ; INTERRUPT ENABLE; EIE1 ; EXTERNAL INTERRUPT ENABLE 1; EIE2 ; EXTERNAL INTERRUPT ENABLE 2; IP ; INTERRUPT PRIORITY; EIP1 ; EXTERNAL INTERRUPT PRIORITY REGISTER 1; EIP2 ; EXTERNAL INTERRUPT PRIORITY REGISTER 2 ; P3IF ; PORT 3 EXTERNAL INTERRUPT FLAGS;■-- <6> --端口IO初始化及交叉开关设置; XBR0 ; DIGITAL CROSSBAR CONFIGURA TION REGISTER 0; XBR1 ; DIGITAL CROSSBAR CONFIGURA TION REGISTER 1; XBR2 ; DIGITAL CROSSBAR CONFIGURA TION REGISTER 2 ; P0MDOUT ; PORT 0 OUTPUT MODE CONFIGURATION; P1MDOUT ; PORT 1 OUTPUT MODE CONFIGURATION; P2MDOUT ; PORT 2 OUTPUT MODE CONFIGURATION; P3MDOUT ; PORT 3 OUTPUT MODE CONFIGURATION; P74OUT ; PORTS 4 - 7 OUTPUT MODE;■-- <7> --外部RAM和片内XRAM; EMI0CN ; EXTERNAL MEMORY INTERFACE CONTROL; EMI0CF ; EXTERNAL MEMORY INTERFACE (EMIF) CONFIGURA TION; EMI0TC ; EXTERNAL MEMORY;■-- <8> --定时器设置; TMOD ; TIMER MODE; TCON ; TIMER CONTROL; T2CON ; TIMER 2 CONTROL; T4CON ; TIMER 4 CONTROL; TMR3CN ; TIMER 3 CONTROL; TMR3RLL ; TIMER 3 RELOAD REGISTER - LOW BYTE; TMR3RLH ; TIMER 3 RELOAD REGISTER - HIGH BYTE; TMR3L ; TIMER 3 - LOW BYTE; TMR3H ; TIMER 3 - HIGH BYTE;■-- <9> --串行通讯; SCON0 ; SERIAL PORT 0 CONTROL; SCON1 ; SERIAL PORT 1 CONTROL; SBUF1 ; SERAIL PORT 1 DA TA; SADDR1 ; SERAIL PORT 1; PCON ; POWER CONTROL; RCAP2L ; TIMER 2 CAPTURE REGISTER - LOW BYTE; RCAP2H ; TIMER 2 CAPTURE REGISTER - HIGH BYTE; RCAP4L ; TIMER 4 CAPTURE REGISTER - LOW BYTE; RCAP4H ; TIMER 4 CAPTURE REGISTER - HIGH BYTE; SADDR0 ; SERIAL PORT 0 SLAVE ADDRESS;■-- <10> --可编程计数器阵列; PCA0CN ; PCA 0 COUNTER CONTROL; PCA0MD ; PCA 0 COUNTER MODE; PCA0CPM0 ; CONTROL REGISTER FOR PCA 0 MODULE 0; PCA0CPM1 ; CONTROL REGISTER FOR PCA 0 MODULE 1; PCA0CPM2 ; CONTROL REGISTER FOR PCA 0 MODULE 2; PCA0CPM3 ; CONTROL REGISTER FOR PCA 0 MODULE 3; PCA0CPM4 ; CONTROL REGISTER FOR PCA 0 MODULE 4;■-- <11> --SMBus通讯; SMB0CN ; SMBUS 0 CONTROL; SMB0CR ; SMBUS 0 CLOCK RA TE; SMB0STA; SMBUS 0 STA TUS; SMB0DA T ; SMBUS 0 DATA; SMB0ADR ; SMBUS 0 SLAVE ADDRESS;■-- <12> --SPI总线通讯; SPI0CKR ; SERIAL PERIPHERAL INTERFACE 0 CLOCK RA TE CONTROL ; SPI0DAT ; SERIAL PERIPHERAL INTERFACE 0 DA TA ; SPI0CFG ; SERIAL PERIPHERAL INTERFACE 0 CONFIGURATION ; SPI0CN ; SERIAL PERIPHERAL INTERFACE 0 CONTROL;-- <13> --ADC转换; AMX0CF ; ADC 0 MUX CONFIGURATION; AMX0SL ; ADC 0 MUX CHANNEL SELECTION; ADC0CF ; ADC 0 CONFIGURA TION; ADC0CN ; ADC 0 CONTROL; ADC0L ; ADC 0 DA TA - LOW BYTE; ADC0H ; ADC 0 DATA - HIGH BYTE; ADC1CF ; ADC 1 ANALOG MUX CONFIGURATION; AMX1SL ; ADC 1 ANALOG MUX CHANNEL SELECT; ADC1CN ; ADC 1 CONTROL; ADC0GTL ; ADC 0 GREA TER-THAN REGISTER - LOW BYTE; ADC0GTH ; ADC 0 GREA TER-THAN REGISTER - HIGH BYTE ; ADC0LTL ; ADC 0 LESS-THAN REGISTER - LOW BYTE; ADC0LTH ; ADC 0 LESS-THAN REGISTER - HIGH BYTE; REF0CN ; VOLTAGE REFERENCE 0 CONTROL; ADC1 ; ADC 1 DA TA;■-- <14> --DAC转换; PCA0L ; PCA 0 TIMER - LOW BYTE; PCA0H ; PCA 0 TIMER - HIGH BYTE; DAC0CN ; DAC 0 CONTROL; DAC1L ; DAC 1 REGISTER - LOW BYTE; DAC1H ; DAC 1 REGISTER - HIGH BYTE; DAC1CN ; DAC 1 CONTROL;■-- <15> --比较器设置; CPT0CN ; COMPARA TOR 0 CONTROL; CPT1CN ; COMPARA TOR 1 CONTROL; EMI0TC ; EMIF TIMING CONTROL;■-- <16> --时钟/电压基准设置; CKCON ; CLOCK CONTROL; SADEN1 ; SERIAL PORT 1 SLAVE ADDRESS MASK; SADEN0 ; SERIAL PORT 0 SLAVE ADDRESS MASK; P1MDIN ; PORT 1 INPUT MODE; PSW ; PROGRAM STATUS WORD; B ; B REGISTER; WDTCN ; WA TCHDOG TIMER CONTROL;◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆◆;;==================================================================== ; function: Init_CTS 定时器/计数器,中断和串行通讯初始化子程序; input: -----------------; output: -----------------; usage: -----------------;====================================================================THS0 equ 0a8hTLS0 equ 09ah; THS1 equ 0fah;0feh;0fah;-4800;0f4h; TLS1 equ 0fah;0feh;0fah;-4800;0f4h;; THS2 equ 0ffh;0feh;0fah;-4800;0f4h; TLS2 equ 0b8h;0feh;0fah;-4800;0f4hInit_TCS: ;定时器/计数器,中断和串行通讯初始化子程序;〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓; ◆◆◆8051内部控制寄存器◆◆◆;************************************************************************************ ;|名称| 代号| 地址|位寻| B7 | B6 | B5 | B4 | B3 | B2 | B1 | B0 | ;|--------|------|------|----|-----|------|------|------|------|------|------|------| ;|电源控制| PCON | 87H | NO |SMOD | -- | -- | -- | GF1 | GF0 | PD | IDL | ;|--------|------|------|----|-----|------|------|------|------|------|------|------| ;|计时控制| TCON | 88H | YE |TF1 | TR1 | TF0 | TR0 | IE1 | IT1 | IE0 | IT0 | ;|--------|------|------|----|-----|------|------|------|------|------|------|------|;|计时模式| TMOD | 89H | NO |1GATE| 1C/T | 1M1 | 1M0 | 0GA TE| 0C/T | 0M1 | 0M0 | ;|--------|------|------|----|-----|------|------|------|------|------|------|------|;|串行控制| SCON | 98H | YE |SM0| SM1 | SM2 | REN | TB8 | RB8 | TI | RI | ;|--------|------|------|----|-----|------|------|------|------|------|------|------|;|中断允许| IE | A8H | YE |EA| -- | ET2 | ES | ET1 | EX1 | ET0 | EX0 | ;|--------|------|------|----|-----|------|------|------|------|------|------|------| ;|中断优先| IP | B8H | YE |-- | -- | PT2 | PS | PT1 | PX1 | PT0 | PX0 | ;************************************************************************************;时钟频率为:11.059200MHz;;机器周期为:12/fosc=1.085069μs;;CT0定时器设定延时为:2000μs;;CT0定时器工作于模式0;;CT0溢出处理采用中断方式;;CT0选择内部时钟;;CT0启动由TR0的0/1决定;;设定波特率为:4800bps;;串口0工作于方式1--T1定时器工作于方式2;;串口1工作于模式3--T2定时器用于波特率发生器4800bpsmov TH0, #THS0mov TL0, #TLS0; mov TH1, #THS1; mov TL1, #TLS1; mov TH2, #THS2; mov TL2, #TLS2;▲■-- <1> --电源管理;〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓〓;87H---PCON-------电源控制寄存器;复位值: 00000000;位7-2:保留。
gd单片机软复位指令 -回复

gd单片机软复位指令-回复GD单片机软复位指令是一种常用的指令,用于将单片机恢复到初始状态,并重新开始执行程序。
在本文中,我们将逐步回答关于GD单片机软复位指令的一些问题。
一、GD单片机软复位指令是什么?GD单片机软复位指令是一种用于将单片机恢复到初始状态的指令。
当单片机遇到非正常情况或需要重新启动程序时,该指令可以被执行,以重新初始化所有寄存器和外设,并将程序计数器重置为程序的起始地址。
二、为什么需要使用软复位指令?使用软复位指令有以下几个方面的原因:1. 异常情况处理:当单片机遇到某些异常情况,如堆栈溢出、地址错误或不可屏蔽中断等,为了保证系统的可靠性和稳定性,需要执行软复位指令来重新初始化单片机,并清除异常状态。
2. 程序重启:当需要重新执行程序时,比如调试程序、进行固件升级或进行性能测试时,可以使用软复位指令将单片机恢复到初始状态,以便重新执行程序。
3. 节约时间:相比于断电重启或硬件复位,软复位指令更加高效,并且不需要重新加载程序和初始化外设,节省了宝贵的时间。
三、GD单片机软复位指令的执行流程是什么?GD单片机软复位指令的执行流程如下:1. 保存寄存器状态:在执行软复位指令之前,需要将当前的寄存器状态保存到内存中或者堆栈中,以便在复位之后恢复。
2. 清除外设状态:执行软复位指令后,需要清除外设的状态,将其重新初始化。
这包括关闭所有打开的外设、清除标志位和计数器等。
3. 初始化寄存器:需要将寄存器重新初始化为它们的初始值,可以根据需要编写初始化程序来完成这个任务。
4. 设置程序计数器:将程序计数器重置为程序的起始地址,以确保程序从头开始运行。
5. 恢复寄存器状态:在复位指令执行完毕之后,可以将之前保存的寄存器状态恢复回来,以便继续执行程序。
四、如何编写GD单片机软复位指令?在GD单片机上编写软复位指令可以使用汇编语言或者高级语言,以下是一种常见的示例代码:; 保存寄存器状态PUSH AXPUSH BXPUSH CXPUSH DX; 清除外设状态MOV AL, 0OUT 80H, AL ; 清除外设状态的操作,这里以80H端口为例; 初始化寄存器MOV AX, 0 ; 初始化AX寄存器MOV BX, 0 ; 初始化BX寄存器MOV CX, 0 ; 初始化CX寄存器MOV DX, 0 ; 初始化DX寄存器; 设置程序计数器JMP START; 恢复寄存器状态START:POP DXPOP CXPOP BXPOP AX; 继续程序执行...以上示例代码假设使用汇编语言进行编写,并以GD单片机为例。
单片机原理与应用及c51程序设计谢维成

单片机原理与应用及c51程序设计谢维成下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!单片机原理与应用及C51程序设计1. 导言单片机作为嵌入式系统中的核心组成部分,在现代科技中扮演着重要的角色。
单片机第7章习题答案
第7章习题答案1.通常8031给用户提供的I/O口有哪几个?为什么?答案:MCS-51系列单片机虽然有4个8位I/O口P0、P1、P2、P3,但4个I/O口实际应用时,并不能全部留给用户作系统的I/O口。
因为当单片机在外部扩展了程序存储器、数据存储器时,就要用P0和P2口作为地址/数据总线,而留给用户使用的I/O口只有P1口和一部分P3口。
(不做系统扩展,都可以用作I/O口)2.在MCS-51单片机应用系统中,外接程序存储器和数据存储器的地址空间允许重叠而不会发生冲突,为什么?外部I/O接口地址是否允许与存储器地址重叠?为什么?答案:因为单片机访问外部程序存储器与访问外部数据存储器(包括外部I/O口)时,会分别产生PSEN与RD/WR两类不同的控制信号,因此外接程序存储器和数据存储器的地址空间允许重叠而不会发生冲突。
外部扩展I/O口占用数据存储器地址空间,与外部数据存储器统一编址,单片机用访问外部数据存储器的指令来访问外部扩展I/O口。
因此外部I/O接口地址是否允许与程序存储器地址重叠不允许与数据数据存储器地址重叠。
3.在通过MOVX指令访问外部数据存储器时,通过I/O口的哪些位产生哪些控制信号?答案:MCS-51对外部数据存储器的访问指令有以下4条:1)MOVX A, @Ri2)MOVX @Ri, A3)MOVX A, @DPTR4)MOVX @DPTR, A访问外部数据存储器指令在执行前,必须把需要访问的存储单元地址存放在寄存器Ri (R0或R1)或DPTR中。
CPU在执行1)、2)指令时,作为外部地址总线的P2口输出P2锁存器的内容、P0口输出R0或R1的内容;在执行3)、4)指令时,P2口输出DPH内容,P0口输出DPL内容。
写时(/WR P3.6)有效;读时(/RD P3.7)有效。
4.外部存储器的片选方式有几种?各有哪些特点?答案:外部存储器的片选方式有线选法和译码法两种。
线选法的特点是连接简单,不必专门设计逻辑电路,但是各个扩展芯片占有的空间地址不连续,因而地址空间利用率低。
8位单片机ws2812b驱动程序算法

8位单片机ws2812b驱动程序算法引言:WS2812B是一种集控制电路和LED灯珠于一体的智能外控LED光源。
在实际应用中,需要使用驱动程序对WS2812B进行控制,以实现各种炫彩的灯光效果。
本文将介绍一种针对8位单片机的WS2812B驱动程序算法。
一、硬件连接:我们需要将WS2812B与8位单片机进行连接。
具体连接方式如下:1. 将WS2812B的VDD引脚连接至单片机的VCC引脚,以供电。
2. 将WS2812B的DIN引脚连接至单片机的GPIO引脚,用于数据传输。
3. 将WS2812B的GND引脚连接至单片机的GND引脚,以接地。
二、驱动程序算法:接下来,我们将介绍一种基于8位单片机的WS2812B驱动程序算法。
1. 初始化:在开始使用WS2812B之前,需要对单片机进行初始化,以确保正常工作。
初始化包括设定时钟、设置引脚模式和配置串口等操作。
2. 发送数据:WS2812B的数据传输采用时间序列方式,每个时间周期分为0和1两种状态。
数据传输的过程中,通过不同的时间长短来表示不同的数据。
3. 发送逻辑0:发送逻辑0时,将DIN引脚拉低一段时间,然后拉高一段时间。
具体时间长短需要根据WS2812B的要求来设置。
4. 发送逻辑1:发送逻辑1时,将DIN引脚拉低一段时间,然后拉高一段时间。
具体时间长短同样需要根据WS2812B的要求来设置。
5. 发送数据帧:发送数据帧时,需要将要显示的颜色数据按照一定的格式进行组织,并按照一定的顺序发送给WS2812B。
具体格式和顺序需要根据WS2812B的要求来设置。
6. 控制灯光效果:通过发送不同的颜色数据帧,可以实现不同的灯光效果。
例如,发送红、绿、蓝三种颜色的数据帧,可以实现白色灯光效果;发送红、绿、蓝三种颜色的数据帧的不同亮度值,可以实现呼吸灯效果。
7. 循环控制:为了实现连续的灯光效果,可以使用循环控制结构来不断发送不同的颜色数据帧。
通过改变数据帧的内容和顺序,可以实现丰富多样的灯光效果。
单片机课程设计
1 引言单片机微型计算机是微型计算机的一个重要分支,也是颇具生命力的机种。
单片机微型计算机简称单片机,特别适用于控制领域,故又称为微控制器。
通常,单片机由单块集成电路芯片构成,内部包含有计算机的基本功能部件:中央处理器、存储器和I/O接口电路等。
因此,单片机只需要和适当的软件及外部设备相结合,便可成为一个单片机控制系统。
当今时代是一个新技术层出不穷的时代,在电子领域尤其是自动化智能控制领域,传统的分立元件或数字逻辑电路构成的控制系统,正以前所未见的速度被单片机智能控制系统所取代。
单片机具有体积小、功能强、成本低、应用面广等优点,可以说,智能控制与自动控制的核心就是单片机。
8051单片机是当前国内外工业测控领域内使用很广泛的一类8位数控制器,它的特点是使用方便、灵活,外围硬件支持十分丰富,世界许多大的半导体生产厂商,如Atmel、Dallas、TI等公司都推出了具有各自特点的增强型8051系列单片机,使用户有了更大的选择空间。
此外,世界上有许多软件公司致力于8051单片机高级编程语言的开发。
汇编语言具有运算效率高、占用存储空间小、实时性强、执行速度快等优点,能直接管理和控制存储器及硬件接口,充分发挥硬件的作用。
掌握了汇编语言,就可以更好地理解高级编程语言。
2 设计任务和要求2.1 设计任务设计任务:利用开发板设计一个电子锁,用4*3组成0~9数字键及确认键、删除键,用8位数码管组成显示电路提示信息,当输入密码时,只显示“一”,当密码位数输入完毕按下“确定”键时,对输入的密码与设定的密码进行比较,若密码正确,则开锁,此处用LED发光二极管亮1S作为提示;若密码不正确,禁止按键输入3S,同时发出“嘀、嘀”的报警声。
设计要求:自己在电脑上编号程序利用KEIL和PROTEUS软件进行模拟仿真,观察运行情况,如果没有和预期的一样,则需要找出原因改正后再进行调试,最后对设计进行总结。
2.2 实用价值与理论意义本课程设计使用设计电子锁的这个方案的原因是:这是我们汇编语言的第一次课程设计,而电子锁,这个方案不会很难设计,还能让我们体验软件编程的是如何与实际(开发板)联系的,更能让我们学到并运用汇编语言。
51单片机的复位
51单片机的复位复位是单片机的初始化操作。
单片机启运运行时,都需要先复位,其作用是使CPU和系统中其他部件处于一个确定的初始状态,并从这个状态开始工作。
因而,复位是一个很重要的操作方式。
但单片机本身是不能自动进行复位的,必须配合相应的外部电路才能实现。
复位电路:当MCS-5l系列单片机的复位引脚RST(全称RESET)出现2个机器周期以上的高电平时,单片机就执行复位操作。
如果RST持续为高电平,单片机就处于循环复位状态。
根据应用的要求,复位操作通常有两种基本形式:上电复位和上电或开关复位。
上电复位要求接通电源后,自动实现复位操作。
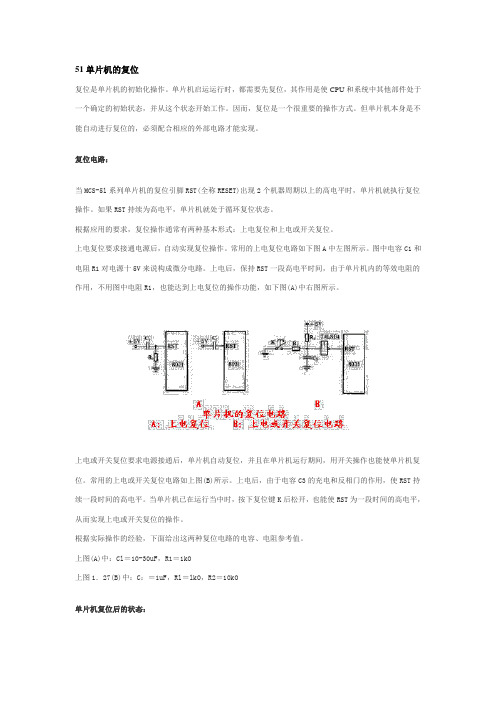
常用的上电复位电路如下图A中左图所示。
图中电容C1和电阻R1对电源十5V来说构成微分电路。
上电后,保持RST一段高电平时间,由于单片机内的等效电阻的作用,不用图中电阻R1,也能达到上电复位的操作功能,如下图(A)中右图所示。
上电或开关复位要求电源接通后,单片机自动复位,并且在单片机运行期间,用开关操作也能使单片机复位。
常用的上电或开关复位电路如上图(B)所示。
上电后,由于电容C3的充电和反相门的作用,使RST持续一段时间的高电平。
当单片机已在运行当中时,按下复位键K后松开,也能使RST为一段时间的高电平,从而实现上电或开关复位的操作。
根据实际操作的经验,下面给出这两种复位电路的电容、电阻参考值。
上图(A)中:Cl=10-30uF,R1=1kO上图1.27(B)中:C:=1uF,Rl=lkO,R2=10kO单片机复位后的状态:单片机的复位操作使单片机进入初始化状态,其中包括使程序计数器PC=0000H,这表明程序从0000H地址单元开始执行。
单片机冷启动后,片内RAM为随机值,运行中的复位操作不改变片内RAM区中的内容,2 1个特殊功能寄存器复位后的状态为确定值,见下表。
值得指出的是,记住一些特殊功能寄存器复位后的主要状态,对于了解单片机的初态,减少应用程序中的初始化部分是十分必要的。
单片机keil初始化流程

单片机keil初始化流程单片机Keil编程中的初始化流程一般包括以下几个步骤:1. 硬件初始化:在程序开始执行前,需要对单片机的硬件资源进行初始化,包括时钟、GPIO口、串口等外设,确保它们处于可用状态。
2. 系统初始化:在硬件初始化完成后,需要对系统进行初始化,包括设置堆栈指针、初始化全局变量区、初始化中断向量表等。
3. 任务初始化:在系统初始化完成后,需要对各个任务进行初始化,包括设置任务的入口点、初始化任务相关的变量和数据结构等。
下面是一个简单的单片机Keil初始化流程示例:```c// 定义单片机型号等信息,包括CPU 型号、晶振频率、Flash 地址等#define CPU_FAMILY_MCS // 晶振频率为8MHz#define FLASH_START_ADDR 0x20000000 // 0x20000000 ~ 0x20001000// 定义头文件#include "startup.h"// 定义系统堆栈大小#define STACK_SIZE 2 * KB// 定义全局变量区大小#define GLOBAL_VAR_SIZE (KB - (STACK_SIZE / KB))// 定义中断向量表void Interrupt_Handler(void) __attribute__((section(".isr_vector")));// 定义系统堆栈初始化函数void InitStack(void) {/* 设置堆栈指针*/_stack_pointer_ = (unsigned char *)(FLASH_START_ADDR + STACK_SIZE);}// 定义全局变量区初始化函数void InitData(void) {/* 初始化全局变量区*/memset((void *)(FLASH_START_ADDR + GLOBAL_VAR_SIZE), 0, KB - GLOBAL_VAR_SIZE);}// 定义系统初始化函数void InitSystem(void) {/* 初始化系统*/InitStack();InitData();/* 设置中断向量表*/_interrupt_vector_table_address_ = (unsigned char *)(FLASH_START_ADDR + INT_VECTOR_OFFSET);}// 定义任务初始化函数void Task1Init(void) {/* 任务1初始化*/// TODO: 初始化任务相关的变量和数据结构等}// 定义任务2初始化函数void Task2Init(void) {/* 任务2初始化*/// TODO: 初始化任务相关的变量和数据结构等}// 定义主函数int main(void) {/* 初始化系统*/InitSystem();/* 任务1初始化*/Task1Init();/* 任务2初始化*/Task2Init();/* 开始执行任务*/while (1) {// TODO: 执行任务}return 0;}// 定义中断处理函数void Interrupt_Handler(void) {/* 中断处理*/// TODO: 处理中断事件}```在这个示例中,我们首先定义了单片机型号等信息,包括CPU 型号、晶振频率、Flash 地址等。
单片机的基本结构

单片机的基本结构一、引言单片机(Microcontroller)是一种集成电路,内部集成了中央处理器(CPU)、存储器(ROM、RAM)、输入/输出接口(I/O)、定时器/计数器(Timer/Counter)等功能模块。
由于其体积小、功耗低、成本较低以及可编程性强等特点,被广泛应用于各个领域,如家电、汽车、电子设备等。
本文将详细介绍单片机的基本结构及其功能模块。
二、单片机的基本结构单片机的基本结构通常包括中央处理器(CPU)、存储器(ROM、RAM)、输入/输出接口(I/O)、定时器/计数器(Timer/Counter)等功能模块。
1. 中央处理器(CPU)中央处理器是单片机的核心部件,负责执行各种指令和控制单片机的运行。
它包括运算器(Arithmetic Logic Unit, ALU)和控制器(Control Unit, CU)两部分。
运算器负责执行算术和逻辑运算,控制器负责从存储器中读取指令并解码执行。
2. 存储器(ROM、RAM)存储器用于存储程序和数据。
单片机的存储器分为只读存储器(Read-Only Memory, ROM)和随机存储器(Random AccessMemory, RAM)两种。
ROM存储器中存储了单片机的固化程序,而RAM存储器用于存储程序的中间结果和变量。
3. 输入/输出接口(I/O)输入/输出接口用于单片机与外部设备进行数据交换。
它可以将外部设备的输入信号转换为数字信号供单片机处理,同时也可以将单片机处理结果输出到外部设备。
输入/输出接口包括通用输入输出口(General Purpose Input/Output, GPIO)和特殊功能寄存器(Special Function Registers, SFR)等。
4. 定时器/计数器(Timer/Counter)定时器/计数器用于产生精确的时间延迟和计数功能。
通过定时器/计数器,可以实现周期性的定时操作和计数功能。
在很多应用中,定时器/计数器被广泛用于实现脉冲宽度调制(PWM)输出、频率测量等功能。
基于单片机的无线遥控智能小车的设计与制作

综合理论245学法教法研究课程教育研究基于单片机的无线遥控智能小车的设计与制作马维维(海南省经济技术学校 海南 海口 571158)前言按照目前多元工业调整动机观察,有关计算机管制范围下的自动化遥控技术开始广受关注,尤其机器人的智能管理方案,能够承担人力在现实生产流程中无法承担的职责要务。
无线遥控小车是沿着上世纪军事理念进行同步改造、设计,为适应防爆危险以及污染效应环境产生,整体布置活动成本不高,发展优势广阔。
我国在开展危险性较高的行业过程中,气体泄露和泥石流地震现场监则工作对人员生命安全造成一定威胁,因此开发意义深刻,需要设计开发人员予以重视。
一、无线遥控小车的设计本文所设计的智能小车主要由3 部分组成:智能小车部分: 车体部分以及2 路电机、单片机STC89C52、驱动电路、红外避障模块;无线通信模块: CC1101 无线通信模块、RS232-TTL 转换电路;系统软件设计: 主要有上位机软件设计和单片机程序设计。
1、遥控小车车体的主要结构遥控小车主要包括: 单片机系统、红外避障模块、无线通信模块、驱动电路。
小车通过红外传感器完成对前方、左方和右方3 个方向的障碍物检测,并以TTL 电平信号的形式送入单片机的I /O 口。
单片机根据收到的信号,进行判断,发出控制信号,通过驱动电路实现小车避障。
上位机经无线模块向单片机发送控制信号,单片机依照应用层的通信协议,对控制信号进行识别判断后控制小车做相应动作。
2、硬件电路设计本系统以STC89C52 单片机为核心控制器,硬件电路主要包括以下几个模块:(1)避障模块。
避障模块利用3 路红外传感器来判断小车前方、左方和右方的障碍物。
当检测范围内无障碍物时,红外传感器向单片机发送高电平; 一旦检测范围内出现障碍物,则发送低电平。
传感器模块有+5V 、GND 、MCU 三根接口线,其中MCU 接口线输出TTL 电平,可以直接连接单片机I \O 口,无需进行电平转换。
单片机标准的上电初始化-概述说明以及解释
单片机标准的上电初始化-概述说明以及解释1.引言1.1 概述概述部分:单片机作为嵌入式系统中的核心组件,其上电初始化是整个系统正常运行的关键步骤。
在单片机标准的设计和应用过程中,上电初始化是不可或缺的环节,它决定了单片机在工作状态下的稳定性和可靠性。
本文将对单片机标准的上电初始化进行深入探讨,包括定义、重要性、流程等方面,旨在为读者提供全面的了解和指导,帮助其更好地应用单片机标准并解决实际问题。
通过对单片机上电初始化的研究,可以提高系统性能和稳定性,为嵌入式系统的开发和应用提供技术支持和指导。
1.2 文章结构今日心情好,阳光明媚,感恩美好。
愿每一天都如此美好。
1.3 目的本文的主要目的是介绍单片机标准的上电初始化流程,通过详细讲解单片机标准的定义、上电初始化的重要性以及具体的初始化流程,帮助读者深入了解单片机的工作原理和初始化过程,提高对单片机应用的理解和应用能力。
通过了解单片机的上电初始化流程,读者可以更好地设计和开发单片机应用程序,确保单片机系统能够稳定可靠地运行。
同时,本文还将展望单片机在未来的应用前景,希望能够激发读者对单片机技术的兴趣,促进单片机技术的进一步发展和应用。
2.正文2.1 单片机标准的定义单片机标准是指针对单片机芯片的软硬件设计和使用过程中所遵循的规范和标准。
单片机标准主要包括芯片的设计规范、开发工具的规范、软件程序设计的规范等方面。
在单片机标准中,通常包括了对芯片引脚功能的定义、内部寄存器的使用规范、时钟和复位电路的设计要求、电源供电的规范,以及对外设接口的定义等内容。
通过遵循单片机标准,可以确保单片机在使用过程中稳定可靠,提高开发效率,降低系统故障率。
单片机标准的制定通常由业内权威机构或厂商制定,以确保单片机在不同厂家生产的芯片之间具有一定的兼容性和统一性。
同时,单片机标准还可以帮助开发人员更好地理解和使用单片机芯片,提高系统的稳定性和性能。
总之,单片机标准是单片机设计和应用过程中必须遵循的规范,是确保单片机系统正常运行和开发效率的重要依据。
基于STC89C52单片机的计算器

基于STC89C52单片机的计算器随着科技的不断发展,单片机已经成为现代电子设备中的重要组成部分。
STC89C52单片机作为一种常见的单片机,因其高性价比和良好的性能而广泛应用于各种嵌入式系统中。
本文将介绍如何使用STC89C52单片机制作一个简单的计算器。
一、硬件设计1、电源电路:为单片机提供稳定的电源。
2、时钟电路:为单片机提供时钟信号,确保其正常运行。
3、复位电路:在单片机出现异常时,通过复位电路实现系统重启。
4、输入电路:用于接收用户输入的数字和运算符。
5、输出电路:用于显示计算结果。
二、软件设计1、初始化程序:对单片机的各个寄存器进行初始化。
2、显示程序:根据需要显示的内容,编写相应的显示程序。
3、输入程序:接收用户输入的数字和运算符,并将其存储在相应的变量中。
4、计算程序:根据用户输入的运算符,调用相应的函数进行计算,并将结果显示在输出电路中。
三、调试与测试1、硬件调试:检查电路板上的元器件是否连接正确,确保电源、输入和输出电路的正常工作。
2、软件调试:通过串口调试工具,对程序进行调试和修改,确保程序的正确性。
3、综合测试:在完成硬件和软件的调试后,进行综合测试,确保计算器的正常工作。
四、结论本文介绍了基于STC89C52单片机的计算器的硬件和软件设计。
通过使用单片机,可以实现简单的计算器功能,并且具有成本低、易于维护和升级等优点。
在制作过程中,需要注意硬件和软件的调试与测试,以确保系统的稳定性和可靠性。
stc89c52单片机技术资料标题:STC89C52单片机技术资料一、概述STC89C52单片机是一种广泛应用的微控制器,它由深圳宏晶科技有限公司生产。
这款单片机具有高性能、低功耗、高可靠性等特点,适用于各种嵌入式系统开发。
下面将详细介绍STC89C52单片机的技术特性、引脚配置、寄存器映射以及常用开发工具等。
二、STC89C52单片机特性1、工作频率:STC89C52单片机的时钟频率可达到35MHz,能够满足大多数应用场景的需求。
单片机程序设计

单片机程序设计单片机程序设计概述单片机(Microcontroller)是一种集成电路芯片,内部集成了处理器、存储器、IO口等功能,用于控制外部设备的操作。
单片机程序设计是指针对特定的应用场景,使用汇编语言或高级语言编写程序,通过单片机实现相应的功能。
单片机的应用领域单片机广泛应用于各个领域,例如智能家居、工业自动化、医疗设备等。
由于单片机具有体积小、功耗低、成本低等特点,在嵌入式系统中得到广泛应用。
单片机程序设计的基本原理和步骤单片机程序设计的基本原理是通过编写一系列指令,将其存储在单片机的存储器中,然后由处理器逐条执行这些指令,从而实现相应的功能。
单片机程序设计的步骤如下:1. 确定需求:要明确需要实现的功能和要求,例如控制LED灯的亮灭、获取传感器数据等。
2. 选择单片机:根据需求选择合适的单片机型号,考虑处理器性能、存储器容量、IO口数量等因素。
3. 开发环境搭建:搭建单片机程序开发环境,包括编译器、调试工具等。
4. 编写程序:根据需求使用汇编语言或高级语言编写程序,实现相应的功能。
程序包括初始化设置、功能实现和IO口控制等部分。
5. 编译和烧录:将编写的程序进行编译二进制文件,然后通过烧录工具将二进制文件烧录到单片机的存储器中。
6. 调试与:通过调试工具对程序进行调试,检查程序的运行是否符合预期。
可以进行功能,确保程序可以正常工作。
7. 优化和改进:根据实际情况对程序进行优化和改进,提高程序的性能和稳定性。
单片机程序设计常用的开发工具和语言开发工具- Keil MDK:一款用于ARM单片机程序开发的集成开发环境,包括编译器、调试工具等。
- MPLAB X IDE:Microchip公司推出的集成开发环境,适用于PIC系列单片机的程序开发。
编程语言- 汇编语言:汇编语言是单片机程序设计中最底层的语言,可以直接操作单片机的寄存器和内存。
- C语言:C语言是单片机程序设计中最常用的高级语言,具有语法简洁、易理解和易于维护的特点。