串口通信Verilog代码
rs串口verilog代码
UART是通用异步收发器的简称,其中有一种电平规范较RS232规范,它用-3~-15V表示正逻辑,3~15V表示负逻辑,通过FPGA芯片实现RS232通信首先要解决的就是FPGA电平和RS232电平之间的矛盾,通常采用MAX3232作为物理层的电平接口,根据MAX3232提供的标准配制方式把物理电路设计好后,接下来的通信就是要实现逻辑的接收和发送……设计最简单的RS232通信逻辑,FPGA实现将接收到的数据会发出去,总共两个数据传输引脚,一收一发。
将此通信模块分为三个部分:接收模块,波特率控制模块,发送模块。
工作原理:此模块接收MAX3232传过来的串行数据,对齐进行判断采样,校验,最后将数据流中的串行数据转换为八位并行数据,将此八位数据储存,或送给发送模块发送出去。
根据RS232通信标准器串行数据分为起始位、数据位、校验位、停止位,空闲时为高电平,起始位通常为低电平,数据位通常为8位,校验位分为奇校验、偶校验等,停止位一位或两位且为高电平。
FPGA接收模块对此数据进行异步接收,首先就要检测其数据传输开始标识,当然就是检测开始位,于是要有下降沿检测电路,检测到下降沿是输出一高脉冲,此电路可以用两个D触发器加上基本门电路实现,脉冲触发开始进入接收状态,输出接收状态标志位,使其为1,此标志位使能波特率控制模块输出采样脉冲,此计数脉冲触发接收模块中的计数器计数,加到相应的位就把当前的串行总线上的值赋给缓冲器,或对其判断,当计数完成11次计数后,已将8位串行数据转成并行数据到缓冲器中,且进行了校验的判断和停止位的判别,这是接收状态结束,接收状态位置0,计数器清零。
对于波特率产生模块用于控制采样数据脉冲的周期,其周期就为串行数据传送一个bit所用的时间,根据此时间和时钟周期设置计数值。
当接收模块完成工作时,接收状态位为0时可以触发发送模块,发送模块检测接收状态的下降沿,由此产生一高脉冲,与发送模块类似,根据波特率控制模块产生的计数脉冲将并行数据转成串行数据,并加上开始位、校验位、停止位。
verilog 逻辑函数 串口发送

verilog 逻辑函数串口发送摘要:1.Verilog 逻辑函数概述2.串口发送原理3.Verilog 实现串口发送的逻辑函数4.应用实例正文:【1.Verilog 逻辑函数概述】Verilog 是一种硬件描述语言,主要用于数字电路和模拟混合信号电路的描述。
它的语法简洁,易于理解和使用。
在数字电路设计中,逻辑函数是基本的构建模块,通过组合这些模块可以实现复杂的数字电路。
【2.串口发送原理】串口(Serial Port)是一种计算机硬件接口,可以通过串行通信传输数据。
发送数据时,数据被逐个比特按顺序传送,这样可以减少线路的传输次数,提高通信效率。
在电子设备中,如单片机、FPGA 等,通常会使用串口进行数据通信。
【3.Verilog 实现串口发送的逻辑函数】要实现串口发送功能,首先需要设计一个状态机,控制数据的发送过程。
下面是一个简单的Verilog 代码示例,实现一个8 位串口发送器:```verilogmodule serial_port_sender(input wire clk, // 时钟信号input wire rst_n, // 低电平复位信号input wire start, // 开始发送信号input wire [7:0] data, // 发送数据output wire busy // 忙碌信号);// 定义状态机typedef enum logic [1:0] {IDLE, SENDING} state_t; state_t current_state, next_state;always_ff @(posedge clk or negedge rst_n) begin if (!rst_n) begincurrent_state <= IDLE;end else begincurrent_state <= next_state;endendalways_comb begincase (current_state)IDLE: beginif (start &&!busy) beginnext_state = SENDING;endendSENDING: beginif (data == 8"b0000_0001) begin // 发送结束标志next_state = IDLE;end else begin// 发送数据busy = 1;next_state = SENDING;endendendcaseendendmodule```【4.应用实例】上述代码实现了一个简单的8 位串口发送器。
verilog 串口时钟相位控制字-概述说明以及解释
verilog 串口时钟相位控制字-概述说明以及解释1.引言1.1 概述概述部分的内容可以包括对verilog 串口时钟相位控制字的简要介绍和重要性的提及。
可以参考以下内容进行编写:在现代通信领域中,串口通信起到了至关重要的作用。
而在串口通信中,时钟相位控制字是一个非常关键的概念。
verilog 串口时钟相位控制字是指通过调节时钟信号的相位来进行数据传输的一种技术。
时钟相位控制字的作用在于确保在数据传输过程中,接收方能够正确地识别发送方发送的数据。
通过调整时钟信号的相位,可以使得接收方在正确的时间点对数据进行采样,从而减少数据传输过程中可能会出现的误差。
时钟相位控制字的设计和调整对于串口通信的稳定性和可靠性具有非常重要的意义。
合理地设置时钟相位控制字可以提高数据传输的成功率,并减少传输过程中可能出现的错误。
因此,了解verilog 串口时钟相位控制字的原理和作用对于串口通信的设计和实现是至关重要的。
在本篇文章中,将详细介绍verilog 串口时钟相位控制字的原理和作用,希望能够为读者提供一个全面的了解,并为未来的研究和应用提供有益的参考。
1.2文章结构1.2 文章结构本文将围绕Verilog串口时钟相位控制字展开讨论,主要分为以下几个部分:第一部分是引言,包括概述、文章结构和目的。
在概述部分,将介绍串口通信的基本原理和应用领域。
文章结构部分将简要介绍本文的章节安排和内容要点。
目的部分将说明本文的研究目的和意义。
第二部分是正文,主要包括串口通信原理和时钟相位控制字的作用。
在串口通信原理部分,将介绍串口通信的基本原理,包括数据传输的方式、波特率的定义和选择。
时钟相位控制字的作用部分将详细探讨时钟相位控制字在串口通信中的作用及其实现原理。
第三部分是结论,主要总结本文的主要内容和研究成果。
在总结部分,将回顾本文的研究目的和主要内容,并对所得出的结论进行归纳和概括。
对未来研究的展望部分将提出一些关于Verilog串口时钟相位控制字相关研究的展望和建议,以促进相关领域的进一步研究和发展。
基于Verilog HDL设计的UART模块
1 UART原理串行通信是指外部设备和计算机间使用一根数据线(另外需要地线,可能还需要控制线)进行数据传输的方式。
数据在一根数据线上一位一位传输,每一位数据都占据一个固定的时间长度。
与并行通信方式相比,串行通信方式的传输速度较慢,但这种通信方式使用的数据线少,在远距离通信中可以节约通信成本,因此得到了广泛的应用。
基本的UART只需要发送和接收两条数据线就可以完成数据的全双工通信,其基本功能是在发送端将控制器通过总线传过来的并行数据,以设定的格式,设定的频率串行地传输出去,并同时在接收端将串行接收到的数据,转换成相应的并行数据发送出去。
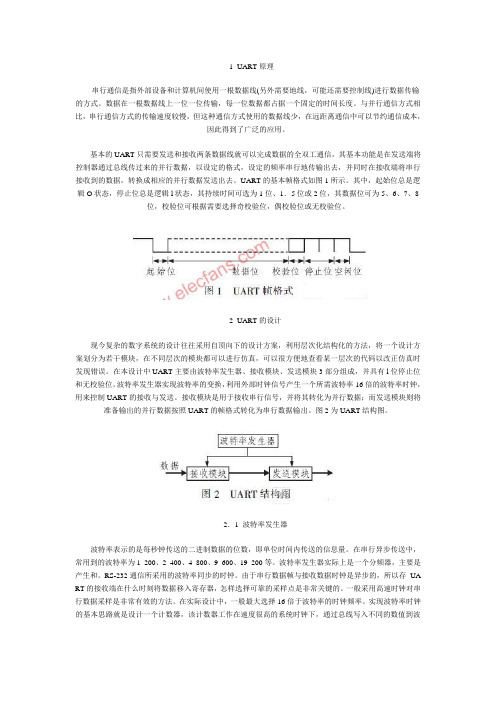
UART的基本帧格式如图1所示。
其中,起始位总是逻辑O状态,停止位总是逻辑l状态,其持续时间可选为1位、1.5位或2位,其数据位可为5、6、7、8位,校验位可根据需要选择奇校验位,偶校验位或无校验位。
2 UART的设计现今复杂的数字系统的设计往往采用自顶向下的设计方案,利用层次化结构化的方法,将一个设计方案划分为若干模块,在不同层次的模块都可以进行仿真,可以很方便地查看某一层次的代码以改正仿真时发现错误。
在本设计中UART主要由波特率发生器、接收模块、发送模块3部分组成,并具有l位停止位和无校验位。
波特率发生器实现波特率的变换,利用外部时钟信号产生一个所需波特率16倍的波特率时钟,用来控制UART的接收与发送。
接收模块是用于接收串行信号,并将其转化为并行数据;而发送模块则将准备输出的并行数据按照UART的帧格式转化为串行数据输出。
图2为UART结构图。
2.1 波特率发生器波特率表示的是每秒钟传送的二进制数据的位数,即单位时间内传送的信息量。
在串行异步传送中,常用到的波特率为1 200、2 400、4 800、9 600、19 200等。
波特率发生器实际上是一个分频器,主要是产生和。
RS-232通信所采用的波特率同步的时钟。
由于串行数据帧与接收数据时钟是异步的,所以存UA RT的接收端在什么时刻将数据移入寄存器,怎样选择可靠的采样点是非常关键的。
电子教材-基于VerilogHDL的UART设计
基于VerilogHDL的UART设计季雄段吉海胡媛媛袁柯于海生(桂林电子工业学院 通信与信息工程系,广西 桂林 541004)摘要:UART是广泛使用的串行数据通信电路,因其要求的传输线少,可靠性高,传输距离远,所以系统间互联常采用RS—232接口方式,一般说来,该接口由硬件(UART专用芯片)实现。
文章基于VerilogHDL语言,结合有限状态机的设计方法来实现UART,将其核心功能集成到FPGA上,使整体设计紧凑、小巧,实现的UART功能稳定、可靠,为RS—232接口提供了一种新的解决方案;同时,与其他设计方法相比较,利用有限状态机的方法具有结构模式直观简单,设计流程短,程序层次分明,易综合,可靠性高等优点,必将在EDA技术中发挥重要作用。
关键词:VerilogHDL; UART;帧格式;状态机引言随着微机系统的广泛运用和微机网络的极大发展,UART(Universal Asynchronous Receive Transmitter)【1】在数据通信及控制系统中得到了广泛运用。
8250、NS16450等芯片都是常见的UART 器件[2],这类芯片已经相当复杂,有的含有许多辅助模块(如FIFO),但在实际中有时只需要使用UART的部分功能,因而会造成一定的资源浪费。
FPGA在现代电子设计中的广泛运用,使我们可以充分利用其资源,在芯片上集成UART的功能模块,这样就无需外接专用UART芯片,从而简化了电路,缩小了体积,设计的灵活性更大。
文章通过分析UART的功能,利用有限状态机[4]来描述UART核心控制逻辑的方法,将其核心功能集成,从而使整个设计更加稳定、可靠。
基本的UART通信只需要两条信号线就可以完成数据的相互通信。
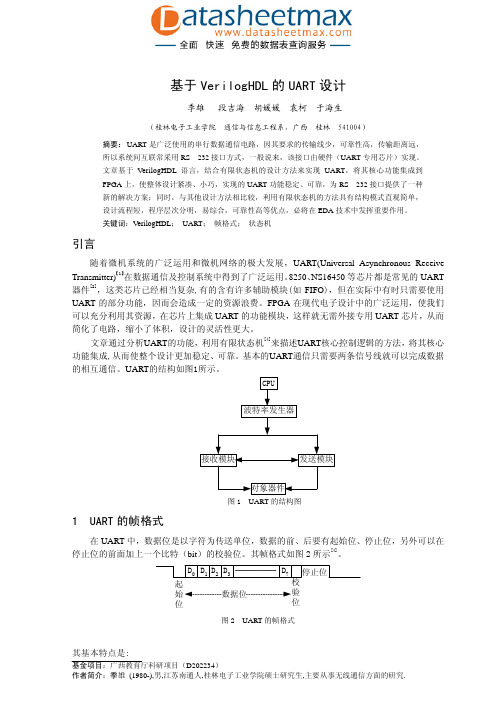
UART的结构如图1所示。
图1 UART的结构图1 UART的帧格式在UART中,数据位是以字符为传送单位,数据的前、后要有起始位、停止位,另外可以在停止位的前面加上一个比特(bit)的校验位。
verilog RS232 串口通信 verilog

module uart_top(clk,rs232_rx,rs232_tx);
input clk; //时钟信号50M
input rs232_rx; //数据输入信号
bps_start,
clk_bps,
rs232_rx,
rx_data,
rx_int
);
input clk; //50MHz时钟
input rst_n; //低电平复位信号
input rs232_rx; //接收数据信号
);
uart_rx uart_rx(//数据接收模块
.clk(clk),
.rst_n(rst_n),
.bps_start(bps_start1),
.clk_bps(clk_bps1),
.rs232_rx(rs232_rx),
.rx_data(rx_data),
else
begin
if(int_cnt<250) int_cnt<=int_cnt+1'b1;
end
end
assign data_flg=(int_cnt==10)?1'b1:1'b0;
always @(posedge data_flg or negedge rst_n)
output rs232_tx; //数据输出信号
wire clk_bps1,clk_bps2;
wire bps_start1,bps_start2;
wire [7:0] rx_data;
i2s的verilog代码

i2s的verilog代码i2s的Verilog代码是指用Verilog语言编写的用于实现i2s (Inter-IC Sound)接口功能的代码。
i2s接口是一种常用的音频数据传输接口,广泛应用于音频芯片、音频设备和数字信号处理器等领域。
i2s接口由三根线组成,分别是时钟线(SCLK)、数据线(SD)和帧同步线(WS)。
时钟线用于同步数据的传输,数据线用于传输音频数据,帧同步线用于标志数据的起始和结束。
在Verilog代码中,首先需要定义i2s接口的输入输出端口,并根据接口规范进行信号的定义和赋值。
接下来可以根据具体的应用需求,编写相应的模块和逻辑来实现i2s接口的功能。
一个简单的i2s接口的Verilog代码示例如下:```verilogmodule i2s_interface (input wire SCLK, // 时钟线input wire SD, // 数据线input wire WS, // 帧同步线output wire audio // 音频数据输出);reg [15:0] audio_data; // 音频数据寄存器always @(posedge SCLK) beginif (WS) beginaudio_data <= SD; // 读取音频数据endendassign audio = audio_data; // 输出音频数据endmodule```上述代码中,定义了一个名为i2s_interface的模块,该模块包含了一个i2s接口,输入端口为SCLK、SD和WS,输出端口为audio。
在always块中,通过检测时钟线的上升沿,判断帧同步线的状态,如果帧同步线为高电平,则将数据线的数据存入音频数据寄存器中。
最后,通过assign语句将音频数据输出到audio端口。
需要注意的是,上述代码仅为示例,实际的i2s接口实现可能需要根据具体的应用需求进行修改和优化。
此外,在实际应用中,还需要考虑时序约束、数据格式、时钟频率等因素,以确保i2s接口的正常工作。
verilog串口通信程序【精选文档】
FPGA实现RS-232串口收发的仿真过程(Quartus+Synplify+ModelSim)(2007-09-11 12:17:37)网上关于RS—232的异步收发介绍得很多,最近没事学着摸索用ModelSim来做时序仿真,就结合网上的参考资料和自己的琢磨,做了这个东西.针对我这个小程序结合FPGA的开发流程,主要走了以下几步:1。
文本程序输入(Verilog HDL)2。
功能仿真(ModelSim,查看逻辑功能是否正确,要写一个Test Bench)3。
综合(Synplify Pro,程序综合成网表)4. 布局布线(Quartus II,根据我选定的FPGA器件型号,将网表布到器件中,并估算出相应的时延)5。
时序仿真(ModelSim,根据时延做进一步仿真)这里贴出我的程序和各个详细步骤,能和各位正在学习的新手们一起分享。
0。
原理略一、文本程序输入(Verilog HDL)发送端:module trans(clk,rst,TxD_start,TxD_data,TxD,TxD_busy);input clk,rst,TxD_start;input[7:0]TxD_data; // 待发送的数据output TxD, // 输出端口发送的串口数据TxD_busy;reg TxD;reg [7:0] TxD_dataReg; // 寄存器发送模式,因为在串口发送过程中输入端不可能一直保持有效电平reg [3:0]state;parameter ClkFrequency = 25000000;// 时钟频率-25 MHzparameter Baud = 115200;// 串口波特率-115200// 波特率产生parameter BaudGeneratorAccWidth = 16;reg [BaudGeneratorAccWidth:0]BaudGeneratorAcc;wire [BaudGeneratorAccWidth:0] BaudGeneratorInc = ((Baud〈<(BaudGeneratorAccWidth—4))+(ClkFrequency>>5))/(ClkFrequency>〉4);wire BaudTick = BaudGeneratorAcc[BaudGeneratorAccWidth];wire TxD_busy;always @(posedge clk or negedge rst)if(~rst)BaudGeneratorAcc <= 0;else if(TxD_busy)BaudGeneratorAcc <= BaudGeneratorAcc[BaudGeneratorAccWidth-1:0]+ BaudGeneratorInc;// 发送端状态wire TxD_ready = (state==0);// 当state = 0时,处于准备空闲状态,TxD_ready = 1 assign TxD_busy = ~TxD_ready; // 空闲状态时TxD_busy = 0// 把待发送数据放入缓存寄存器TxD_dataRegalways @(posedge clk or negedge rst)if(~rst)TxD_dataReg <= 8’b00000000;else if(TxD_ready &TxD_start)TxD_dataReg <= TxD_data;// 发送状态机always @(posedge clk or negedge rst)if(~rst)beginstate 〈= 4’b0000;// 复位时,状态为0000,发送端一直发1电平TxD <= 1'b1;endelsecase(state)4’b0000: if(TxD_start) beginstate <= 4’b0100;// 接受到发送信号,进入发送状态end4’b0100: if(BaudTick) beginstate <= 4’b1000;// 发送开始位—0电平TxD <= 1'b0;end4'b1000: if(BaudTick)beginstate <= 4'b1001;// bit 0TxD <= TxD_dataReg[0];end4'b1001:if(BaudTick) beginstate <= 4’b1010; // bit 1TxD 〈= TxD_dataReg[1];end4’b1010:if(BaudTick) beginstate <= 4'b1011; // bit 2TxD <= TxD_dataReg[2];end4'b1011:if(BaudTick)beginstate <= 4'b1100; // bit 3TxD 〈= TxD_dataReg[3];end4'b1100: if(BaudTick) beginstate 〈= 4’b1101;// bit 4TxD <= TxD_dataReg[4];end4'b1101:if(BaudTick) beginstate 〈= 4’b1110;// bit 5TxD 〈= TxD_dataReg[5];end4'b1110:if(BaudTick) beginstate <= 4’b1111; // bit 6TxD <= TxD_dataReg[6];end4’b1111:if(BaudTick) beginstate 〈= 4’b0010;// bit 7TxD <= TxD_dataReg[7];end4'b0010: if(BaudTick) beginstate 〈= 4'b0011;// stop1TxD 〈= 1’b1;end4’b0011:if(BaudTick)beginstate 〈= 4’b0000;// stop2TxD 〈= 1'b1;enddefault: if(BaudTick)beginstate 〈= 4’b0000;TxD 〈= 1’b1;endendcaseendmodule接收端:module rcv(clk,rst,RxD,RxD_data,RxD_data_ready,);input clk,rst,RxD;output[7:0] RxD_data; // 接收数据寄存器output RxD_data_ready;// 接收完8位数据,RxD_data 值有效时,RxD_data_ready 输出读信号parameter ClkFrequency = 25000000;// 时钟频率-25MHzparameter Baud = 115200; // 波特率-115200reg[2:0]bit_spacing;reg RxD_delay;reg RxD_start;reg[3:0] state;reg[7:0]RxD_data;reg RxD_data_ready;// 波特率产生,使用8倍过采样parameter Baud8 = Baud*8;parameter Baud8GeneratorAccWidth = 16;wire [Baud8GeneratorAccWidth:0]Baud8GeneratorInc = ((Baud8〈<(Baud8GeneratorAccWidth—7))+(ClkFrequency>〉8))/(ClkFrequency>>7);reg [Baud8GeneratorAccWidth:0]Baud8GeneratorAcc;always @(posedge clk or negedge rst)if(~rst)Baud8GeneratorAcc 〈= 0;elseBaud8GeneratorAcc <= Baud8GeneratorAcc[Baud8GeneratorAccWidth—1:0] + Baud8GeneratorInc;// Baud8Tick 为波特率的8倍-115200*8 = 921600wire Baud8Tick = Baud8GeneratorAcc[Baud8GeneratorAccWidth];// next_bit 为波特率-115200always @(posedge clk or negedge rst)if(~rst||(state==0))bit_spacing 〈= 0;else if(Baud8Tick)bit_spacing <= bit_spacing + 1;wire next_bit = (bit_spacing==7);// 检测到RxD 有下跳沿时,RxD_start 置1,准备接收数据always@(posedge clk)if(Baud8Tick)beginRxD_delay 〈= RxD;RxD_start <= (Baud8Tick & RxD_delay & (~RxD));end// 状态机接收数据always@(posedge clk or negedge rst)if(~rst)state 〈= 4’b0000;else if(Baud8Tick)case(state)4'b0000:if(RxD_start)state <= 4’b1000;// 检测到下跳沿4’b1000: if(next_bit)state 〈= 4'b1001;// bit 04'b1001: if(next_bit) state <= 4'b1010;// bit 14’b1010:if(next_bit) state 〈= 4’b1011; // bit 24’b1011: if(next_bit) state <= 4'b1100;// bit 34’b1100: if(next_bit)state 〈= 4'b1101;// bit 44'b1101:if(next_bit)state <= 4’b1110; // bit 54'b1110: if(next_bit) state <= 4'b1111; // bit 64'b1111: if(next_bit) state 〈= 4'b0001; // bit 74'b0001: if(next_bit) state 〈= 4’b0000;// 停止位default: state <= 4'b0000;endcase// 保存接收数据到RxD_data 中always @(posedge clk or negedge rst)if(~rst)RxD_data 〈= 8’b00000000;else if(Baud8Tick &&next_bit && state[3])RxD_data <= {RxD,RxD_data[7:1]};// RxD_data_ready 置位信号always @(posedge clk or negedge rst)if(~rst)RxD_data_ready <= 0;elseRxD_data_ready <= (Baud8Tick && next_bit &&state==4'b0001); endmodule为了测试收发是否正常,写的Test Bench`timescale 1ns / 1nsmodule rs232_test;reg clk,rst,TxD_start;reg [7:0]TxD_data;wire[7:0] RxD_data;wire //RxD,TxD,TxD_busy,RxD_data_ready;trans trans(.clk(clk),。
ps2键盘解码基础实验与串口通信进阶实验

PS2 键盘解码实验一、实验内容:基础实验:ps2键盘通过ps2接口和FPGA相连,通过在开发板上对接收到的键盘扫描码进行接收和解码,将键盘值在数码管上进行显示。
进阶实验:串口通信实验,ps2键盘作为输入,通过FPGA和电脑进行串行通信,将键盘值显示在电脑屏幕上。
二、实验代码:(1)基础实验:module ps2( rst_n,clk,ps2clk,ps2data,sw,seg);input rst_n; //高电平复位信号input clk; //50M固有时钟input ps2clk;//ps2时钟线input ps2data; //ps2数据线output [3:0] sw;//数码管位选择output [7:0]seg;//数码管段选择reg [5:0] num; // 用于循环寄存器reg [7:0] temp_data; //数据暂存reg ps2clk_r0,ps2clk_r1; //用于检测ps2clk时钟下降沿reg [7:0]seg;wire neg_ps2clk;// ps2clk时钟下降沿wire [3:0]sw;wire ps2clk;wire ps2data;//***********检测ps2clk时钟下降沿并存于neg_ps2clk寄存器中************// always @ (posedge clk or posedge rst_n)beginif(rst_n)beginps2clk_r0 <= 1'b1;ps2clk_r1 <= 1'b1;endelsebeginps2clk_r0 <= ps2clk;ps2clk_r1 <= ps2clk_r0;endendassign neg_ps2clk = ~ps2clk_r0 & ps2clk_r1;//**************检测到ps2clk的下降沿则传送一位数据****************// always @ (posedge clk or posedge rst_n)beginif(rst_n)beginnum <= 4'd0;temp_data <= 8'b0000_0000;endelseif(neg_ps2clk)begincase (num)6'd0: num <= num+1'b1;6'd1: beginnum <= num+1'b1;temp_data[0] <= ps2data; //bit0end6'd2: beginnum <= num+1'b1;temp_data[1] <= ps2data; //bit1end6'd3: beginnum <= num+1'b1;temp_data[2] <= ps2data; //bit2end6'd4: beginnum <= num+1'b1;temp_data[3] <= ps2data; //bit3end6'd5: beginnum <= num+1'b1;temp_data[4] <= ps2data; //bit4end6'd6: beginnum <= num+1'b1;temp_data[5] <= ps2data; //bit5end6'd7: beginnum <= num+1'b1;temp_data[6] <= ps2data; //bit6end6'd8: beginnum <= num+1'b1;temp_data[7] <= ps2data; //bit7end6'd9: beginnum <= num+1'b1;end6'd32: beginnum <= 6'd0;enddefault: num<=num+1;endcaseendend//***************************译码显示部分***************************// always @ (temp_data)begincase (temp_data)8'h45: seg <= 8'b0000_0011; //08'h16: seg <= 8'b1001_1111; //18'h1E: seg <= 8'b0010_0101; //28'h26: seg <= 8'b0000_1101; //38'h25: seg <= 8'b1001_1001; //48'h2E: seg <= 8'b0100_1001; //58'h36: seg <= 8'b0100_0001; //68'h3D: seg <= 8'b0001_1111; //78'h3E: seg <= 8'b0000_0001; //88'h46: seg <= 8'b0000_1001; //98'h00: seg <= 8'b1111_1111;default:;endcaseendassign sw = 4'b1011;endmodule(2)进阶实验:1.top模块:module top(clk,rst,ps2clk,ps2data,rs232_tx,ps2_state);input clk;input rst;input ps2clk;input ps2data;output rs232_tx;//串口输出端output ps2_state;//有键按下时数据准备好状态位wire [7:0]dout;//暂存按键的ASSIC码值wire bps_start;//发送启动信号wire clk_bps;//波特率控制信号dfps2m1(.rst(rst),.clk(clk),.ps2clk(ps2clk),.ps2data(ps2data),.ps2_state(ps2_state),.dout(dou t));bote m2(.bps_start(bps_start),.clk(clk),.rst(rst),.clk_bps(clk_bps));chuangkoum3(.clk(clk),.rst(rst),.clk_bps(clk_bps),.rx_int(ps2_state),.rx_data(dout),.bps_start(bps _start),.rs232_tx(rs232_tx));endmodule2.ps2键盘模块:module dfps2( rst,clk,ps2clk,ps2data,ps2_state,dout);input rst;input clk;input ps2clk;input ps2data;output ps2_state;output [7:0]dout;reg [5:0] num;reg [7:0] temp_data;reg ps2clk_r0,ps2clk_r1;reg [7:0]dout;reg ps2_state;wire neg_ps2clk;//*********检测ps2clk时钟下降沿并存于neg_ps2clk寄存器中********// always @ (posedge clk or posedge rst)beginif(rst)beginps2clk_r0 <= 1'b1;ps2clk_r1 <= 1'b1;endelsebeginps2clk_r0 <= ps2clk;ps2clk_r1 <= ps2clk_r0;endendassign neg_ps2clk = (~ps2clk_r0) & ps2clk_r1;//******检测到ps2clk的下降沿则传送一位数据并判断ps2_state的状态*****// always @ (posedge clk or posedge rst)beginif(rst)beginnum <= 4'd0;temp_data <= 8'b0000_0000;ps2_state<=1'b0;endelsebeginif(neg_ps2clk)begincase (num)6'd0: beginps2_state <= 1'b0;num <= num+1'b1;end6'd1: begintemp_data[0] <= ps2data; //bit0ps2_state <= 1'b0;num <= num+1'b1;end6'd2: begintemp_data[1] <= ps2data; //bit1ps2_state <= 1'b0;num <= num+1'b1;end6'd3: begintemp_data[2] <= ps2data; //bit2ps2_state <= 1'b0;num <= num+1'b1;end6'd4: begintemp_data[3] <= ps2data; //bit3ps2_state <= 1'b0;num <= num+1'b1;end6'd5: begintemp_data[4] <= ps2data; //bit4ps2_state <= 1'b0;num <= num+1'b1;end6'd6: begintemp_data[5] <= ps2data; //bit5ps2_state <= 1'b0;num <= num+1'b1;end6'd7: begintemp_data[6] <= ps2data; //bit6ps2_state <= 1'b0;num <= num+1'b1;end6'd8: begintemp_data[7] <= ps2data; //bit7ps2_state <= 1'b0;num <= num+1'b1;end6'd9: beginps2_state <= 1'b0;num <= num+1'b1;end6'd10: beginps2_state <= 1'b1;num <= num+1'b1;end6'd32: beginps2_state <= 1'b0;num <= 6'd0;enddefault: beginps2_state <= 1'b0;num <= num+1;endendcaseendendend//******************将输出键值通码转换成ASSIC码值******************// always @(posedge clk or posedge rst)//Generatebeginif(rst)dout<=8'b0000_0000;elsebeginif(num==6'd10)begincase (temp_data)8'h45: dout <= 8'd48; //08'h16: dout <= 8'd49; //18'h1E: dout <= 8'd50; //28'h26: dout <= 8'd51; //38'h25: dout <= 8'd52; //48'h2E: dout <= 8'd53; //58'h36: dout <= 8'd54; //68'h3D: dout <= 8'd55; //78'h3E: dout <= 8'd56; //88'h46: dout <= 8'd57; //98'h1C: dout <= 8'd65; //A8'h32: dout <= 8'd66; //B8'h21: dout <= 8'd67; //C8'h23: dout <= 8'd68; //D8'h24: dout <= 8'd69; //E8'h2B: dout <= 8'd70; //F8'h34: dout <= 8'd71; //G8'h33: dout <= 8'd72; //H8'h00: dout <= 8'd0;default: dout <= 8'd0;endcaseendendendendmodule3.波特率模块:module bote(bps_start,clk,rst,clk_bps);input rst;input clk;input bps_start;//波特率转换启动信号output clk_bps;//转换后输出信号reg clk_bps;reg [11:0]i;//用于分频计数parameter speed=2603;//波特率控制50M/9600/2//**********************9600bps波特率产生模块*********************// always @(posedge clk or posedge rst)//Generatebeginif(rst)beginclk_bps<=1'b0;i <= 12'b0;endelsebeginif(bps_start)beginif(i==speed)begini <= 12'b0;clk_bps <= ~clk_bps;endelsei<=i+1'b1;endendendendmodule4.串口通信模块:module chuangkou(clk,rst,clk_bps,rx_int,rx_data,bps_start,rs232_tx );input clk;input rst;input clk_bps;//波特率变换后信号input rx_int;//接收准备好信号input [7:0]rx_data;//暂存键值的ASSIC码值output bps_start;//传输启动信号output rs232_tx; //串口输出端口reg [3:0]j; //用于循环寄存器reg clk_bps_r0,clk_bps_r1;// 用于检测clk_bps时钟上升沿reg rs232_tx;reg bps_start;wire posedge_clk_bps; //clk_bps时钟上升沿寄存器//**************检测到clk_bps的上升沿则传送一位数据*************// always @ (posedge clk or posedge rst)beginif(rst)beginclk_bps_r0 <= 1'b0;clk_bps_r1 <= 1'b0;rs232_tx <= 1'b1;bps_start <= 1'b0;j <= 1'b0;endelsebeginclk_bps_r0 <= clk_bps;clk_bps_r1 <= clk_bps_r0;if(rx_int)beginbps_start <= 1'b1;endelse if(bps_start)beginif(posedge_clk_bps)begincase(j)4'd0: beginrs232_tx<=1'b0;j <= j+1'b1;end4'd1: beginrs232_tx<=rx_data[0];j<=j+1'b1;end4'd2: beginrs232_tx<=rx_data[1];j<=j+1'b1;end4'd3: beginrs232_tx<=rx_data[2];j<=j+1'b1;end4'd4: beginrs232_tx<=rx_data[3];j<=j+1'b1;end4'd5: beginrs232_tx<=rx_data[4];j<=j+1'b1;end4'd6: beginrs232_tx<=rx_data[5];j<=j+1'b1;end4'd7: beginrs232_tx<=rx_data[6];j<=j+1'b1;end4'd8: beginrs232_tx<=rx_data[7];j<=j+1'b1;end4'd9: beginrs232_tx<=1'b1;bps_start <= 1'b0;j<=4'b0;enddefault: j<=4'd0;endcaseendendendendassign posedge_clk_bps = clk_bps_r0 & ~clk_bps_r1; endmodule5.管脚约束文件NET"clk" LOC="B8";NET"rst" LOC="H13";NET"ps2clk" LOC="R12";NET"ps2data" LOC="P11";NET"rs232_tx" LOC="P9";三、进阶实验结果:四、实验感想Ps2键盘解码实验持续了近一周,在这一周的实验中,我失败的很多次,但也在一次次的失败中吸取教训,一次次的重复并最终完成实验达到预期的效果,在这次实验中收获了很多。
fpga利用io口实现rs422通信的代码

fpga利用io口实现rs422通信的代码RS422通信是一种全双工、差分信号传输的串行通信协议。
相较于RS232通信协议,RS422通信协议传输距离更远、传输速度更快、噪声干扰更小,并且能够支持多个设备同时通信。
在本文中,我们将介绍如何利用FPGA的IO口实现RS422通信。
首先,我们需要为FPGA选择一个支持RS422协议的IO口。
以下是常用的几种IO口:1. 差分输出:FPGA通过两个相反的信号线向外输出差分信号。
3. 孤立输入:FPGA通过单一信号线接收差分信号,并通过内部电路将差分信号转换为单压缩信号。
在本文中,我们将选择差分输入的方式进行RS422通信。
接下来,我们需要配置FPGA的IO口。
一般来说,FPGA会提供相应的IP核用于配置IO口,我们可以通过IP核配置管理器进行配置。
以下是常见的IO口配置:1. 设置IO口的功能:将IO口设置为输入、输出或双向模式。
2. 设置IO口的电平:确定IO口的高电平和低电平的电压值。
3. 设置IO口的上下拉电阻:控制IO口的输入输出电阻。
4. 设置IO口的保护电路:为了保护IO口不受过电压或过电流的损坏,通常需要为IO 口配置保护电路。
接下来,我们可以开始编写FPGA的代码。
以下是实现RS422通信的代码:```verilogmodule RS422 (input clk, //时钟信号input rst, //复位信号input [7:0] rx, //接收端口output [7:0] tx, //发送端口output de, //差分输出使能output re, //差分输入使能output [1:0] ie //输入使能);//定义常量localparam BIT_CNT = 8; //一帧数据位数 localparam CNT_MAX = 16'h3FFF; //计数器最大值 localparam BAUD_RATE = 9600; //波特率//计数器reg [15:0] cnt;always @(posedge clk or posedge rst) beginif (rst) begincnt <= 0;end else beginif (cnt >= CNT_MAX) begincnt <= 0;end else begincnt <= cnt + 1;endendend//接收数据wire [BIT_CNT-1:0] rx_data;reg rx_flag;reg rx_err;reg rx_done;uart_rx #(BIT_CNT) uart_rx_inst (.rx(rx),.clk(clk),.rst(rst),.data(rx_data),.flag(rx_flag),.err(rx_err),.done(rx_done));assign tx = tx_data;//差分接收器使能信号assign re = 1;//输入使能assign ie[0] = tx_done;assign ie[1] = rx_done;endmodule```以上代码中,我们使用了一个基于计数器的时序生成器来产生波特率同步信号,用于控制发送和接收的时序。
串口通讯设计之Verilog实现
串口通讯设计之V e r i l o g实现FPGA串口模块是将由RS-485发送过来的数据进行处理,提取出8位有效数据,并按异步串口通讯的格式要求输出到MAX3223的12脚。
FPGA选用Xilinx公司的Spartan?II系列xc2s50。
此部分为该设计的主体。
如上所述,输入数据的传输速率为700k波特率。
为了使FPGA能够正确地对输入数据进行采样,提高分辨率能力和抗干扰能力,采样时钟必须选用比波特率更高的时钟,理论上至少是波特率时钟的2倍。
1 串口通信基本特点随着多微机系统的应用和微机网络的发展,通信功能越来越显得重要。
串行通信是在一根传输线上一位一位地传送信息.这根线既作数据线又作联络线。
串行通信作为一种主要的通信方式,由于所用的传输线少,并且可以借助现存的电话网进行信息传送,因此特别适合于远距离传送。
在串行传输中,通信双方都按通信协议进行,所谓通信协议是指通信双方的一种约定。
约定对数据格式、同步方式、传送速度、传送步骤、纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。
异步起止式的祯信息格式为:每祯信息由四部分组成:a.1位起始位。
b.5~8位数据位。
传送顺序是低位在前,高位在后.依次传送。
c.一位校验位,也可以没有。
d.最后是1位或是2位停止位。
FPGA(Field Pmgrammable Gate Array)现场可编程门阵列在数字电路的设计中已经被广泛使用。
这种设计方式可以将以前需要多块集成芯片的电路设计到一块大模块可编程逻辑器件中,大大减少了电路板的尺寸,增强了系统的可靠性和设计的灵活性。
本文详细介绍了已在实际项目中应用的基于FPGA的串口通讯设计。
本设计分为硬件电路设计和软件设计两部分,最后用仿真验证了程序设计的正确性。
2 系统的硬件设计本方案的异步串行通信的硬件接口电路图如图1所示,主要由四部分组成:RS-485数据发送模块、FPGA 串口模块、MAX3223和DB9。
verilog串口发送 例化逻辑函数

verilog串口发送例化逻辑函数摘要:1.引言2.Verilog 串口发送的基本原理3.例化逻辑函数的定义和应用4.实例:使用例化逻辑函数实现串口发送5.总结正文:1.引言在数字电子系统中,串口通信是一种常见的通信方式。
Verilog 作为一种硬件描述语言,可以用来描述和实现串口发送功能。
例化逻辑函数是Verilog 中的一种重要编程技巧,可以用来简化和优化代码。
本文将介绍如何使用例化逻辑函数实现串口发送。
2.Verilog 串口发送的基本原理Verilog 中的串口发送功能主要通过两个模块实现:发送器(sender)和接收器(receiver)。
发送器负责将数据字符从并行转换为串行,按位发送给接收器。
接收器负责将串行数据字符接收并转换为并行数据。
3.例化逻辑函数的定义和应用例化逻辑函数是一种可重用的模块,它包含一个或多个输入端口和相应的输出端口。
通过实例化例化逻辑函数,可以方便地实现不同功能的模块。
在Verilog 中,例化逻辑函数的定义和使用方法如下:```verilogmodule example_module (input wire clk,input wire rst,input wire data_in,output wire data_out);reg data_out;always @(posedge clk or posedge rst) beginif (rst) begindata_out <= 1"b0;end else begindata_out <= data_in;endendendmodule```在需要使用例化逻辑函数的地方,可以使用以下方法实例化:```verilogexample_module my_module (.clk(clk),.rst(rst),.data_in(data_in),.data_out(data_out));```4.实例:使用例化逻辑函数实现串口发送下面是一个使用例化逻辑函数实现串口发送的简单示例:```verilogmodule sender (input wire clk,input wire rst,input wire start,input wire [7:0] data,output wire busy);reg [7:0] shift_reg;reg busy_temp;always @(posedge clk or posedge rst) begin if (rst) beginshift_reg <= 8"b0;busy <= 1"b0;end else if (start &&!busy) beginshift_reg <= data;busy <= 1"b1;end else if (!start && busy) beginshift_reg <= {shift_reg[6:0], data};busy <= 1"b0;endendassign busy = busy_temp;endmodulemodule receiver (input wire clk,input wire rst,input wire busy,output reg [7:0] data);reg [7:0] shift_reg;always @(posedge clk or posedge rst) begin if (rst) beginshift_reg <= 8"b0;end else if (busy) beginshift_reg <= {shift_reg[6:0], data};endendassign data = shift_reg[6:0];endmodulemodule top (input wire clk,input wire rst,input wire start,input wire [7:0] data_in,output wire data_out );sender s (.clk(clk),.rst(rst),.start(start),.data(data_in),.busy(busy));receiver r (.clk(clk),.rst(rst),.busy(busy),.data(data_out));endmodule```5.总结本文介绍了如何使用Verilog 编写一个简单的串口发送模块,并使用例化逻辑函数实现不同功能的模块。
串行器verilog代码

串行器verilog代码串行器(Serializer)是一种电子设备,用于将并行数据转换为串行数据,以便在单个通道上进行传输。
以下是一个简单的串行器的 Verilog 代码示例:verilogmodule Serializer (input wire clk, // 时钟信号input wire reset, // 复位信号input wire [7:0] parallel_data, // 并行数据输入output reg serial_data // 串行数据输出);reg [2:0] shift_reg; // 移位寄存器,用于存储并行数据的位reg [2:0] count; // 计数器,用于控制移位寄存器的移位次数always @(posedge clk or posedge reset) beginif (reset) begin// 当复位信号为高电平时,将计数器和移位寄存器清零count <= 0;shift_reg <= 0;serial_data <= 0;end else beginif (count == 3'd7) begin// 当计数器达到最大值时,将并行数据的最低位存入移位寄存器,并将计数器清零shift_reg <= {parallel_data[0], shift_reg[2:1]};count <= 0;end else begin// 否则,将移位寄存器向左移动一位,并将计数器加1shift_reg <= {shift_reg[1:0], serial_data};count <= count + 1;end// 将移位寄存器的最低位作为串行数据输出serial_data <= shift_reg[0];endendendmodule需要注意的是,上述代码中的计数器 count 用于控制移位寄存器的移位次数,当计数器达到最大值时,将并行数据的最低位存入移位寄存器,并将计数器清零。
基于FPGA的串口通信电路设计

基于FPGA的串口通信电路设计[摘要]串行通信接口是一种应用广泛的通信接口。
目前,大部分处理器都集成了支持rs-232接口的通用异步收发器,本文基于fpga开发板设计了一个串口数据采集和处理程序,介绍了用verilog hdl硬件描述语言来开发波特率发生器、接收模块和发送模块这三个模块,以及系统各个模块的具体设计方法和原理,用quartus ii软件进行仿真并给出结果,分别验证各个模块的正确性及用fpga实现串行通信的可行性。
[关键词]串行通信 rs-232 verilog hdl fpga中图分类号:tn 文献标识码:a 文章编号:1009-914x(2013)08-320-011.fpga概述fpga现场可编程逻辑门阵列是数字系统设计的主要硬件平台,其主要特点是完全由用户通过软件进行配置和编程,从而完成某种特定的功能,且可以反复擦写。
fpga具有运算速度快、根据需求在内部嵌入硬/软ip核,以及反复编程,擦写,使用的特点,被广泛应用于通信,数字信号处理,工业控制等领域。
2.rs232串口通信接口串口即串行数据接口主要用于网管控制或主业务数据的传输,支持数据的双向传输,速率9600-115200bps,即可以完成和pc的通信,也可以完成与带有标准串口的外设相连。
其中串口接口分为带插孔和带插针的两种,其中插针端称为dce,插孔端称为dte。
3.串口通信的verilog hdl实现本设计要求在fpga开发板上实现波特率为115200bps,停止位为1比特、1比特校验位的串口通信,并要求和pc机通过串口调试助手完成双向通信。
3.1波特率发生器模块的verilog hdl实现波特率发生器实际上是一个分频器,从给定的系统时钟频率得到要求的波特率。
一般来讲,为了提高系统的容错性处理,要求波特率发生器的输出时钟为实际串口数据波特率的n倍,n可以取值为8、16、32、64等。
在本设计中,系统的时钟为50mhz,取n为16,则分频系数为50000000/(16*115200)=27.127,取整为27。
波特率发生器
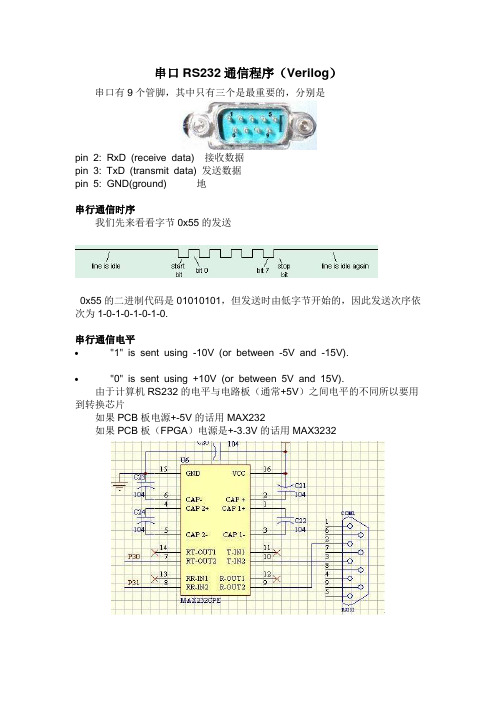
串口RS232通信程序(Verilog)串口有9个管脚,其中只有三个是最重要的,分别是pin 2: RxD (receive data)接收数据pin 3: TxD (transmit data)发送数据pin 5: GND(ground)地串行通信时序我们先来看看字节0x55的发送0x55的二进制代码是01010101,但发送时由低字节开始的,因此发送次序依次为1-0-1-0-1-0-1-0.串行通信电平∙"1" is sent using -10V (or between -5V and -15V).∙"0" is sent using +10V (or between 5V and 15V).由于计算机RS232的电平与电路板(通常+5V)之间电平的不同所以要用到转换芯片如果PCB板电源+-5V的话用MAX232如果PCB板(FPGA)电源是+-3.3V的话用MAX3232这个图的串口如果采用母头的话,要用交叉公母线,保证是PCB板上这边的RxD连计算机的TxD(3 Pin),PCB板这边的TxD连计算机的RxD(2 Pin).串行通信波特率这里要弄清楚波特率与比特率的差别:比特率是数字信号的传输速率,它用单位时间内传输的二进制代码的有效位(bit)数来表示,其单位为每秒比特数bit/s(bps)、每秒千比特数(Kbps)或每秒兆比特数(Mbps)来表示(此处K和M分别为1000和1000000,而不是涉及计算机存储器容量时的1024和1048576)。
波特率指数据信号对载波的调制速率,它用单位时间内载波调制状态改变次数来表示,其单位为波特(Baud)。
波特率与比特率的关系为:比特率=波特率X单个调制状态对应的二进制位数两相调制(单个调制状态对应1个二进制位)的比特率等于波特率;四相调制(单个调制状态对应2个二进制位)的比特率为波特率的两倍;八相调制(单个调制状态对应3个二进制位)的比特率为波特率的三倍;依次类推。
Verilog实现串口通信
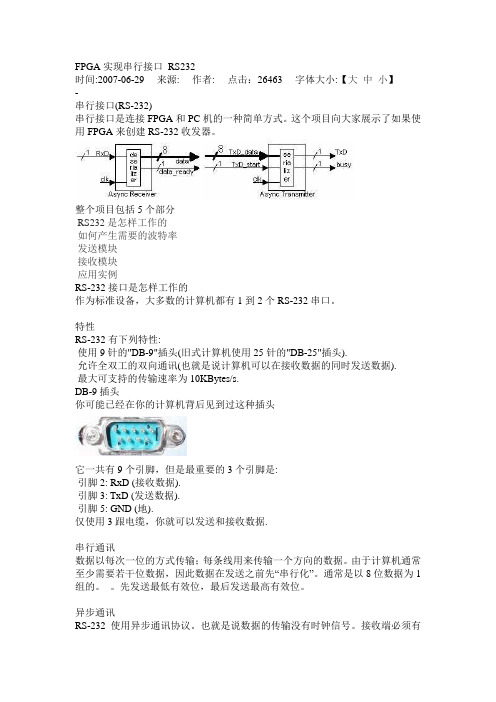
FPGA实现串行接口RS232时间:2007-06-29 来源: 作者: 点击:26463 字体大小:【大中小】-串行接口(RS-232)串行接口是连接FPGA和PC机的一种简单方式。
这个项目向大家展示了如果使用FPGA来创建RS-232收发器。
整个项目包括5个部分RS232是怎样工作的如何产生需要的波特率发送模块接收模块应用实例RS-232接口是怎样工作的作为标准设备,大多数的计算机都有1到2个RS-232串口。
特性RS-232有下列特性:使用9针的"DB-9"插头(旧式计算机使用25针的"DB-25"插头).允许全双工的双向通讯(也就是说计算机可以在接收数据的同时发送数据).最大可支持的传输速率为10KBytes/s.DB-9插头你可能已经在你的计算机背后见到过这种插头它一共有9个引脚,但是最重要的3个引脚是:引脚2: RxD (接收数据).引脚3: TxD (发送数据).引脚5: GND (地).仅使用3跟电缆,你就可以发送和接收数据.串行通讯数据以每次一位的方式传输;每条线用来传输一个方向的数据。
由于计算机通常至少需要若干位数据,因此数据在发送之前先“串行化”。
通常是以8位数据为1组的。
先发送最低有效位,最后发送最高有效位。
异步通讯RS-232使用异步通讯协议。
也就是说数据的传输没有时钟信号。
接收端必须有某种方式,使之与接收数据同步。
对于RS-232来说,是这样处理的:串行线缆的两端事先约定好串行传输的参数(传输速度、传输格式等)当没有数据传输的时候,发送端向数据线上发送"1"每传输一个字节之前,发送端先发送一个"0"来表示传输已经开始。
这样接收端便可以知道有数据到来了。
开始传输后,数据以约定的速度和格式传输,所以接收端可以与之同步每次传输完成一个字节之后,都在其后发送一个停止位("1")让我们来看看0x55是如何传输的:0x55的二进制表示为:01010101。
verilog iic 读写
在Verilog中,实现I2C(Inter-Integrated Circuit)读写操作需要定义I2C的接口信号,包括SCL(Serial Clock Line)和SDA(Serial Data Line),以及根据具体需求定义其他控制信号。
以下是一个简单的Verilog代码示例,实现I2C写操作:verilog复制代码module i2c_write (input wire scl,input wire sda,input wire start,input wire write_bit,input wire [7:0] data,output reg ack);reg [7:0] ack_data;reg ack_flag;always @(posedge scl) beginif (start) beginack_flag <= 1'b0;ack_data <= 8'h00;end else if (write_bit) beginack_data <= data;ack_flag <= 1'b1;endendassign ack = ack_flag & ~sda;endmodule在上述代码中,scl和sda是I2C总线的时钟线和数据线,start信号表示开始信号,write_bit信号表示当前是写操作,data是写入的数据,ack是应答信号。
在时钟上升沿时,根据当前是开始信号还是写操作信号,将相应的数据写入到ack_data寄存器中,并将ack_flag标志位设为1。
最后,将应答信号赋值为ack_flag 和sda的逻辑与。
以下是一个简单的Verilog代码示例,实现I2C读操作:verilog复制代码module i2c_read (input wire scl,input wire sda,input wire start,input wire read_bit,output reg [7:0] data,output reg ack);reg [7:0] ack_data;reg ack_flag;reg read_data;always @(posedge scl) beginif (start) beginack_flag <= 1'b0;ack_data <= 8'h00;end else if (read_bit) beginack_data <= sda;ack_flag <= 1'b1;end else if (!sda) begin// 读取数据时,sda为低电平read_data <= ack_data; // 读取数据到read_data寄存器中endendassign ack = ack_flag & ~sda; // 应答信号为ack_flag和sda的逻辑与取反值assign data = read_data; // 将读取的数据输出到data信号上endmodule在上述代码中,读操作的过程与写操作类似,只是在读取数据时,需要将sda信号拉低,并在时钟上升沿时将读取的数据存储到read_data寄存器中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Verilog串口通信代码module ck(clk,rst_n,rs232_rx,rs232_tx);input clk; // 50MHz主时钟input rst_n; //低电平复位信号input rs232_rx; // RS232接收数据信号output rs232_tx; // RS232发送数据信号wire bps_start; //接收到数据后,波特率时钟启动信号置位wire clk_bps; // clk_bps的高电平为接收或者发送数据位的中间采样点wire[7:0] rx_data; //接收数据寄存器,保存直至下一个数据来到wire rx_int; //接收数据中断信号,接收到数据期间始终为高电平//----------------------------------------------------speed_select speed_select( .clk(clk), //波特率选择模块,接收和发送模块复用,不支持全双工通信.rst_n(rst_n),.bps_start(bps_start),.clk_bps(clk_bps));my_uart_rx my_uart_rx( .clk(clk), //接收数据模块.rst_n(rst_n),.rs232_rx(rs232_rx),.clk_bps(clk_bps),.bps_start(bps_start),.rx_data(rx_data),.rx_int(rx_int));my_uart_tx my_uart_tx( .clk(clk), //发送数据模块.rst_n(rst_n),.clk_bps(clk_bps),.rx_data(rx_data),.rx_int(rx_int),.rs232_tx(rs232_tx),.bps_start(bps_start));endmodulemodule speed_select(clk,rst_n,bps_start,clk_bps);input clk; // 50MHz主时钟input rst_n; //低电平复位信号input bps_start; //接收到数据后,波特率时钟启动信号置位output clk_bps; // clk_bps的高电平为接收或者发送数据位的中间采样点parameter bps9600 = 5207, //波特率为9600bpsbps19200 = 2603, //波特率为19200bpsbps38400 = 1301, //波特率为38400bpsbps57600 = 867, //波特率为57600bpsbps115200 = 433; //波特率为115200bpsparameter bps9600_2 = 2603,bps19200_2 = 1301,bps38400_2 = 650,bps57600_2 = 433,bps115200_2 = 216;reg[12:0] bps_para; //分频计数最大值reg[12:0] bps_para_2; //分频计数的一半reg[12:0] cnt; //分频计数reg clk_bps_r; //波特率时钟寄存器//----------------------------------------------------------reg[2:0] uart_ctrl; // uart波特率选择寄存器,怎样配置uart_ctr??//----------------------------------------------------------always @ (posedge clk or negedge rst_n) beginif(!rst_n) beginuart_ctrl <= 3'd0; //默认波特率为9600bpsendelse begincase (uart_ctrl) //波特率设置3'd0: beginbps_para <= bps9600;bps_para_2 <= bps9600_2;end3'd1: beginbps_para <= bps19200;bps_para_2 <= bps19200_2;end3'd2: beginbps_para <= bps38400;bps_para_2 <= bps38400_2;end3'd3: beginbps_para <= bps57600;bps_para_2 <= bps57600_2;end3'd4: beginbps_para <= bps115200;bps_para_2 <= bps115200_2;enddefault: ;endcaseendendalways @ (posedge clk or negedge rst_n)if(!rst_n) cnt <= 13'd0;else if(cnt<bps_para && bps_start) cnt <= cnt+1'b1; //波特率时钟计数启动else cnt <= 13'd0;always @ (posedge clk or negedge rst_n)if(!rst_n) clk_bps_r <= 1'b0;else if(cnt==bps_para_2 && bps_start) clk_bps_r <= 1'b1; // clk_bps_r高电平为接收或者发送数据位的!中间!采样点else clk_bps_r <= 1'b0;assign clk_bps = clk_bps_r;endmodulemodule my_uart_rx(clk,rst_n,rs232_rx,clk_bps,bps_start,rx_data,rx_int);input clk; // 50MHz主时钟input rst_n; //低电平复位信号input rs232_rx; // RS232接收数据信号!!input clk_bps; // clk_bps的高电平为接收或者发送数据位的中间采样点output bps_start; //接收到数据后,波特率时钟启动信号置位output[7:0] rx_data; //接收数据寄存器,保存直至下一个数据来到output rx_int; //接收数据中断信号,接收到数据期间始终为高电平//----------------------------------------------------------------reg rs232_rx0,rs232_rx1,rs232_rx2; //接收数据寄存器,滤波用wire neg_rs232_rx; //表示数据线接收到下降沿always @ (posedge clk or negedge rst_n) beginif(!rst_n) beginrs232_rx0 <= 1'b1;rs232_rx1 <= 1'b1;rs232_rx2 <= 1'b1;endelse beginrs232_rx0 <= rs232_rx;rs232_rx1 <= rs232_rx0;rs232_rx2 <= rs232_rx1;endendassign neg_rs232_rx = rs232_rx2 & ~rs232_rx1; //接收到下降沿后neg_rs232_rx置高一个时钟周期 ??//----------------------------------------------------------------reg bps_start_r;reg[3:0] num; //移位次数reg rx_int; //接收数据中断信号,接收到数据期间始终为高电平always @ (posedge clk or negedge rst_n) beginif(!rst_n) beginbps_start_r <= 1'bz;rx_int <= 1'b0;endelse if(neg_rs232_rx) beginbps_start_r <= 1'b1; //启动接收数据rx_int <= 1'b1; //接收数据中断信号使能endelse if(num==4'd12) begin //??bps_start_r <= 1'bz; //数据接收完毕rx_int <= 1'b0; //接收数据中断信号关闭endendassign bps_start = bps_start_r;//----------------------------------------------------------------reg[7:0] rx_data_r; //接收数据寄存器,保存直至下一个数据来到//----------------------------------------------------------------reg[7:0] rx_temp_data; //当前接收数据寄存器reg rx_data_shift; //数据移位标志always @ (posedge clk or negedge rst_n) beginif(!rst_n) beginrx_data_shift <= 1'b0;rx_temp_data <= 8'd0;num <= 4'd0;rx_data_r <= 8'd0;endelse if(rx_int) begin //接收数据处理if(clk_bps) begin //读取并保存数据,接收数据为一个起始位,8bit数据,一个结束位 rx_data_shift <= 1'b1;num <= num+1'b1;if(num<=4'd8) rx_temp_data[7] <= rs232_rx; //锁存9bit(1bit起始位,8bit 数据)??如何配置rs232_rxendelse if(rx_data_shift) begin //数据移位处理rx_data_shift <= 1'b0;if(num<=4'd8) rx_temp_data <= rx_temp_data >> 1'b1; //移位8次,第1bit起始位移除,剩下8bit正好是接收数据else if(num==4'd12) beginnum <= 4'd0; //接收到STOP位后结束,num清零rx_data_r <= rx_temp_data; //把数据锁存到数据寄存器rx_data中endendendendassign rx_data = rx_data_r;endmodulemodule my_uart_tx(clk,rst_n,clk_bps,rx_data,rx_int,rs232_tx,bps_start);input clk; // 50MHz主时钟input rst_n; //低电平复位信号input clk_bps; // clk_bps的高电平为接收或者发送数据位的中间采样点input[7:0] rx_data; //接收数据寄存器input rx_int; //接收数据中断信号,接收到数据期间始终为高电平,在次利用它的下降沿来启动发送数据output rs232_tx; // RS232发送数据信号output bps_start; //接收或者要发送数据,波特率时钟启动信号置位//---------------------------------------------------------reg rx_int0,rx_int1,rx_int2; //rx_int信号寄存器,捕捉下降沿滤波用wire neg_rx_int; // rx_int下降沿标志位always @ (posedge clk or negedge rst_n) beginif(!rst_n) beginrx_int0 <= 1'b0;rx_int1 <= 1'b0;rx_int2 <= 1'b0;endelse beginrx_int0 <= rx_int;rx_int1 <= rx_int0;rx_int2 <= rx_int1;endendassign neg_rx_int = ~rx_int1 & rx_int2; //捕捉到下降沿后,neg_rx_int拉地保持一个主时钟周期??//---------------------------------------------------------reg[7:0] tx_data; //待发送数据的寄存器//---------------------------------------------------------reg bps_start_r;reg tx_en; //发送数据使能信号,高有效reg[3:0] num;always @ (posedge clk or negedge rst_n) beginif(!rst_n) beginbps_start_r <= 1'bz;tx_en <= 1'b0;tx_data <= 8'd0;endelse if(neg_rx_int) begin //接收数据完毕,准备把接收到的数据发回去bps_start_r <= 1'b1;tx_data <= rx_data; //把接收到的数据存入发送数据寄存器tx_en <= 1'b1; //进入发送数据状态中endelse if(num==4'd11) begin //数据发送完成,复位bps_start_r <= 1'bz;tx_en <= 1'b0;endendassign bps_start = bps_start_r;//---------------------------------------------------------reg rs232_tx_r;always @ (posedge clk or negedge rst_n) beginif(!rst_n) beginnum <= 4'd0;rs232_tx_r <= 1'b1;endelse if(tx_en) beginif(clk_bps) beginnum <= num+1'b1;case (num)4'd0: rs232_tx_r <= 1'b0; //发送起始位4'd1: rs232_tx_r <= tx_data[0]; //发送bit04'd2: rs232_tx_r <= tx_data[1]; //发送bit14'd3: rs232_tx_r <= tx_data[2]; //发送bit24'd4: rs232_tx_r <= tx_data[3]; //发送bit34'd5: rs232_tx_r <= tx_data[4]; //发送bit44'd6: rs232_tx_r <= tx_data[5]; //发送bit54'd7: rs232_tx_r <= tx_data[6]; //发送bit64'd8: rs232_tx_r <= tx_data[7]; //发送bit74'd9: rs232_tx_r <= 1'b0; //发送结束位default: rs232_tx_r <= 1'b1;endcaseendelse if(num==4'd11) num <= 4'd0; //复位endendassign rs232_tx = rs232_tx_r; //如何配置rs232_tx endmodule。