FIP0403称重控制仪说明书RS485.
FIP0403称重控制仪快速操作指南
FIP-0403称重控制仪表快速操作指南广州华极电气技术有限公司目录一、仪表面板说明-------------------------------------------------------------1二、控制参数说明-------------------------------------------------------------2三、调试-----------------------------------------------------------------------10四、检测皮重-----------------------------------------------------------------10五、挂码标定-----------------------------------------------------------------10六、实物标定--------------------------------------------------------------------11一、仪表面板说明1、指示灯定义电源正常(绿色)电源正常时该灯亮。
CPU正常(绿色)CPU正常时该灯亮。
报警灯(红色)仪表、皮带秤出现故障停机时该灯亮。
极小值灯(红色)低于极限值时闪烁,参见故障信息。
极大值灯(红色)高于极限值时闪烁,参见故障信息。
2、键盘定义启动/停止。
计数器清零。
FUNC:调用功能菜单和事件信息正文。
选择功能,选择上页或下页的显示内容。
DEL:确认事件信息或删除输入值。
ESC:中断功能,中止输入,退出功能分配器。
DAT:准备输入或修改设定值。
ENT:确认输入或确认显示的功能。
~数字键,输入参数。
负号和小数点。
二、控制参数说明FIP-0403称重控制仪共计有138个参数,下面列出比较重要的参数,详细参数列表参见《称重控制仪表说明书》B组 Rated Data(额定数据)B01 Feed Rate Unit(流量单位 P)出厂值: -------kg /h可选参数: -------kg/h-----.-kg/h----.—kg/h---.---kg/h-------t/h-----.-t/h----.—t/h---.---t/hB02 Nominal Feed Rate(额定流量 I)出厂值: 10.0000t/h最小值: 0.0020t/h最大值: 99999.9t/h用于极限值和服务数值的标准。
F403说明书
F403-PD 控制器使用说明书第一章序言1.注意事项A.仪表的接地线严禁接零线或与其它电器共用地线,必须独立良好接地。
B.供电电源严禁与大功率或启动频繁的设备共用。
C.保护好仪表的操作前板,严禁用硬物划刮或高温烫损失。
D.非专业维修人员严禁打开机箱。
E.打开机箱前必须保证拔下电源插头。
F.供电电源上的接线必须接触良好,不得有似接非接的情况。
第二章面板1.键盘说明:标定键,校称时用。
:清除累计量键,停机时,通过“PX”组选择键选到参数“F2=××××××”按下此键,“F2”参数显示的总累计量被清除,此时参数“F2=000000”。
:HX、bX、uX组参数选择键(控制参数),连续按循环显示“Hx、bX、UX”组参数,按住不放则连续显示所有控制参数。
:FX组参数选择键(运行参数):连续按则循环显示“FX”组参数,按住不放则连续显示。
:光标移位键:修改参数时,移动选定被修改的数字位,被选中的数字位会闪动。
连续按可在各数字之间从最低位到最高位循环移动。
~:确认(回车)键在参数修改结束后,按此键表示修改完成并存入。
参数的修改第三章参数说明F2:累计量显示范围:0~999999 单位:吨系统在运行时,秤体物料的总累计重量,此值不能修改只能清楚。
清除产量说明:停机时按参数选择键“F2”选择到“F2”的状态下,按累计量清除键“=0”可以清除参数“F2”的累计值。
注意:外部计量开始端×3必须在闭合状态下,方可开始累计。
F4:零点值取值范围:0~4095。
一般取值在400左右。
零点值为秤体上无物料时的模拟量(参数‘bn’)输入值,系统自动测出,也可以人工设定。
用于恒速秤控制时(控制参数‘H6=0’)每次启动都自动校零(H6=2时,不校零直接启动),用于调速秤控制时(控制参数‘H6=1’)启动不校零直接启动。
为提高秤体的计量精度,零点校整时间可以设定。
FIP0403称重控制仪说明书RS485
目录第一章概述 (1)第二章控制 (4)第三章系统参数 (10)第四章效验与标定 (24)第五章系统服务值 (27)第六章事件信息 (28)第七章安装与调整 (31)第八章维护 (33)通讯协议第一章概述一、FIP-403称重控制仪FIP-403是DEL/DEM定量给料机的测量和控制系统。
本说明书涉及配有传送皮带的控制系统。
1.称重给料机通过调节皮带速度来控制给料速率。
2.控制预给料机的皮带秤通过调节皮带负载来控制给料速率。
3.具有恒定负载的皮带秤通过控制传送带速度来调节皮带负载。
二、显示5×7点阵规格,6mm高字符上部显示左侧:运行信息右侧:设定的给料速率,单位为kg/h或t/h下部显示左侧:事件信息右侧:可设定给料速率、皮带速度等三、信号灯2个绿色和3个红色LED。
绿色信号灯:就绪待用红色信号灯:错误或极限值信息四、键盘微动开关启动或停止。
预选下部显示;功能选择。
复位计数器。
FUNC 调用功能菜单和事件信息正文。
DEL 确认事件信息;删除输入。
ESC 中止功能。
ENT 启动功能;确认输入。
DAT 准备输入,如输入设定值。
输入参数。
输入符号和小数点。
五、符号定义I = 给料速率单位:kg/h或t/h在单位时间里从皮带上卸下的物料数量。
P = 给料速率设定值单位:kg/h或t/hZ = 给料速率单位:kg或t给料数量=给料速率×给料时间。
V = 传送皮带速度单位:m/sQ = 皮带负载单位:kg/m每米传送皮带上的物料重量。
重量测定:受控方式体积测定:非受控方式六、测量原理连续测量传送带负载Q和传送带速度V,并将二者相乘,乘积便是给料速率,进而可计算出给料数量。
I kg/hQ kg/mV m/s第二章控制一、上电上电出现故障期间·计数器读数·计数器脉冲无输出·预选项正常显示服务值等,如ON-time以上各项能持续保持。
通电后,系统先自动测试显示和信号灯状况,然后显示系统的版本号几秒钟,接着才出现正常显示。
称重仪说明书

GM8006H称重控制器注意:使用本仪表钱前认真阅读本说明书a:仪表电源进线必须接触良好,不允许出现:手超生锈,接触不好现象。
b:仪表器、通讯、及速度信号等弱电线缆不可与强电电缆同走一个电缆沟。
c:仪表控制柜接地线必须单独接大地。
d:传感器屏蔽接地线必须单独接大地。
仪表控制柜接地传感器屏蔽线接地和强电电气接地。
不能共用一个接地。
e:变频器控制柜必须接大地。
f:变频器控制的电机必须接大地。
g:仪表供电电源严禁与大功率火气大png频繁的电器共相。
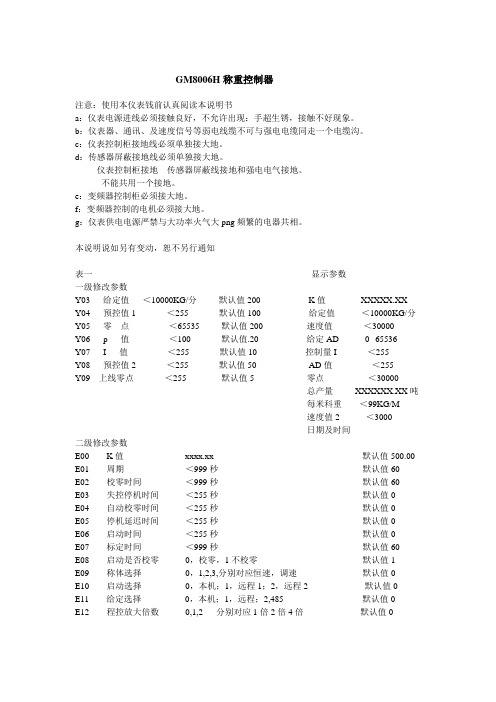
本说明说如另有变动,恕不另行通知表一显示参数一级修改参数Y03 给定值<10000KG/分默认值200 K值XXXXX.XX Y04 预控值1 <255 默认值100 给定值<10000KG/分Y05 零点<65535 默认值200 速度值<30000Y06 p 值<100 默认值.20 给定AD 0--65536Y07 I 值<255 默认值10 控制量I <255Y08 预控值2 <255 默认值50 AD值<255Y09 上线零点<255 默认值5 零点<30000总产量XXXXXX.XX吨每米科重<99KG/M速度值2 <3000日期及时间二级修改参数E00 K值xxxx.xx 默认值500.00 E01 周期<999秒默认值60E02 校零时间<999秒默认值60E03 失控停机时间<255秒默认值0E04 自动校零时间<255秒默认值0E05 停机延迟时间<255秒默认值0E06 启动时间<255秒默认值0E07 标定时间<999秒默认值60E08 启动是否校零0,校零,1不校零默认值1E09 称体选择0,1,2,3,分别对应恒速,调速默认值0E10 启动选择0,本机;1,远程1;2,远程2 默认值0E11 给定选择0,本机;1,远程;2,485 默认值0E12 程控放大倍数0,1,2 分别对应1倍2倍4倍默认值0E13 计量单位选择1,KG;0,吨默认值1 E14 波特率0,1,2,3,E15 停机是否累计0不累计;1累计E16 速度零点0-255E17 标定砝码重量<10000KGE18 日期年,月,日E19 时间时,分,秒E20 远程给定输入量最大值<10000KG/分默认值500KG E21 远程流量输出量最大值<10000KG/分默认值500KG E22 远程给定上限10-20mA对应65536 默认值12228 E23 远程给定下限0—4mA对应0-xxxxx 默认值2278 E24 流量输出上限1023对应10-20mA 默认值891E25 流量输出下限0xxx对应0-4mA 默认值178E26 自动停机1到给定自动停机,0反之默认值0E27 设备地址<255 默认值0E28 计量选择0,启动开始计量1端口控制开始量默认值0E29 报警选择0,报警开放1报警关默认值0E30 控制步距<30 默认值10E31 序列号1 默认值E32 序列号2 默认值E33 一周总脉冲数默认值5000 E34 称体有效计量段长度<99米默认值0.6E35 皮带周长单位:米默认值4.0 E36 提前量1 单位KG 默认值5.0 E37 显示选择下排显示选择显示累积量或给定默认值0E38 累计输出脉冲<10000KG 默认值100 E39 提前量2 单位:KG 默认值3.0 E40 班次1—累计一班,2—累计二班,3—累计三班默认值3E41 自动打印选择0—是1—否默认值1E42 一班换班时间0-2359 默认0800 E43 1600 二班换班时间0-2359 默认值1600 E44 2359三班换班时间0-2359 默认值2359 E45 15.00 流量报警上限0-65535 默认600E46 流量报警下限0-65535 默认值15.00 E47 流量滤波<10 0否;1是默认值0GM8006C称重控制器操作使用说明一:简介GM8006H系列简称称重控制器采用国际最近技术研制和生产的新一代配料仪表,是静态,动态计量和配料的专用称重仪表。
申克皮带秤仪表VEG20610说明书(原文翻译)

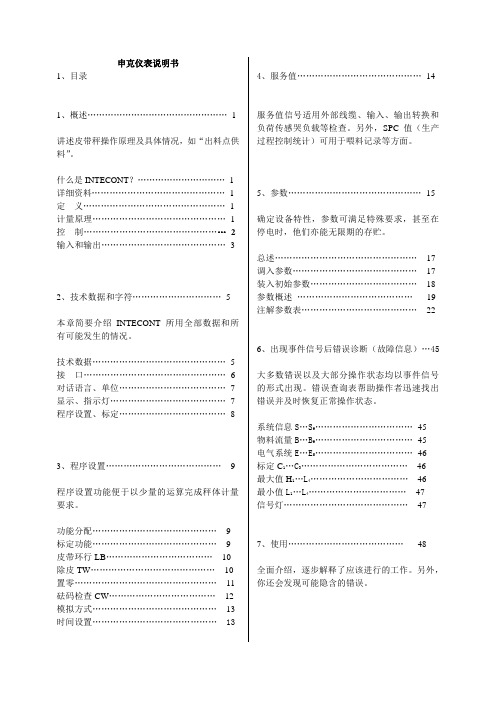
1、目录1、概述 (1)讲述皮带秤操作原理及具体情况,如“出料点供料”。
什么是INTECONT? (1)详细资料 (1)定义 (1)计量原理 (1)控制 (2)输入和输出 (3)2、技术数据和字符 (5)本章简要介绍INTECONT 所用全部数据和所有可能发生的情况。
技术数据 (5)接口 (6)对话语言、单位 (7)显示、指示灯 (7)程序设置、标定 (8)3、程序设置 (9)程序设置功能便于以少量的运算完成秤体计量要求。
功能分配 (9)标定功能 (9)皮带环行LB (10)除皮TW (10)置零 (11)砝码检查CW (12)模拟方式 (13)时间设置.......................................... 13 4、服务值 (14)服务值信号适用外部线缆、输入、输出转换和负荷传感哭负载等检查。
另外,SPC值(生产过程控制统计)可用于喂料记录等方面。
5、参数 (15)确定设备特性,参数可满足特殊要求,甚至在停电时,他们亦能无限期的存贮。
总述 (17)调入参数 (17)装入初始参数 (18)参数概述 (19)注解参数表 (22)6、出现事件信号后错误诊断(故障信息) (45)大多数错误以及大部分操作状态均以事件信号的形式出现。
错误查询表帮助操作者迅速找出错误并及时恢复正常操作状态。
系统信息S...S9 (45)物料流量B...B9 (45)电气系统E...E5 (46)标定C1...C3 (46)最大值H1...L4 (46)最小值L1...L4 (47)信号灯 (47)7、使用 (48)全面介绍,逐步解释了应该进行的工作。
另外,你还会发现可能隐含的错误。
操作学习 (48)机械要求 (49)电器要求 (49)输入参数 (50)控制 (51)功能检查 (52)标定 (53)用砝码检查 (53)带速检查 (54)物料检查 (54)测试插座 (55)机械部分安装与调试 (55)1、概述什么是INTECONT?INTECONT PLUS是用于计量、控制、喂料设备的计量计算系统。
称量仪表说明书
XK3141 IND131/331 称重显示控制器
技手册
目录
第 1 章 引言 .................................................................................................................................... 1 概述 .......................................................................................................................................... 1 性能指标........................................................................................................................... 1 型号 .......................................................................................................................................... 2 规格 .......................................................................................................................................... 2 危险场合的使用.....................................
称重显示器使用说明书
XK3190-A12/A12E称重显示器使用说明书2005年07月版目录第一章主要参数---------------------------------------1第二章显示与键盘------------------------------------2一. 仪表显示与键盘功能示意图二. 键盘功能三. 传感器和仪表的连接第三章操作说明-----------------------------------------5一. 开机及开机自动置零二. 手动置零 (半自动置零)三. 去皮功能四. 计数功能五. 用户功能设置六. 大屏幕与仪表的连接、使用七.串行通信接口第四章维护保养和注意事项-----------------------------8 第五章信息提示----------------------------------------9亲爱的用户:在使用仪表前,敬请仔细阅读说明书!第一章主要参数1.型号:XK3190-A12 / A12E 称重显示器2.准确度:n=30003.采样速度:10次/秒4.传感器灵敏度范围:1.5~3mV / V5.分度值:1/2/5/10/20/50 可选6.显示:6位LCD / LED,6个状态指示7.大屏幕显示接口(可选):采用串行输出方式:电流环信号,传输距离≤50 米,8.通讯接口(可选):R S232C;波特率1200/2400/4800/9600 可9.使用电源: 蓄电池DC6V/4AH (当电源电压小于5.4V 时,显示Bat_lo 报警)10.使用温度、湿度:0~40℃;≤85%RH11.储运温度:-25~55℃(1)第二章显示及键盘一. 仪表显示和键盘功能示意图交流电源XK3190-A12称重显示器(图2 - 1 ) 显示和键盘示意图二. 键盘功能1.[功能]:在称重状态时,按此键大于5 秒,进入用户设置模式。
按此键小于5 秒,进入计数状态。
2. [ * ]:在计数状态时,按此键进入取样样本数输入状态。
0403 压瓦机说明书

第17组设 定长度 第17组加 工块数
0.000 (该组设定长度无效) ~ 65.53 m
0-1000
第18组设 定长度 第18组加 工块数
0.000 (该组设定长度无效) ~ 65.53 m
0-1000
第19组设 定长度 第19组加 工块数
0.000 (该组设定长度无效) ~ 65.53 m
0:不清 1:清0 (清零后本功 能码归0)
0~20
0-1000
0.000 ~65.53 m (掉电存储) 0:从第1组设定长度重新开始 1:从掉电时刻加工组数 (P8.48) 继续加工 2:从掉电时刻加工块数 (P8.49) 继续加工 3:从掉电时刻实际长度 (P8.50) 继续加工
0:不存储 1:存储
0-1000
第11组设 定长度 第11组加 工块数
0.000 (该组设定长度无效) ~ 65.53 m
0-1000
第12组设 定长度 第12组加 工块数
0.000 (该组设定长度无效) ~ 65.53 m
0-1000
第13组设 定长度 第13组加 工块数
0.000 (该组设定长度无效) ~ 65.53 m
0900 0901 0902 0903 0904 0905 0906 0907 0908 0909 090A 090B 090C 090D
3
功能 代码 P8.14 P8.15 P8.16 P8.17 P8.18 P8.19 P8.20 P8.21 P8.22 P8.23 P8.24 P8.25 P8.26 P8.27 P8.28
0-1000
第14组设 定长度 第14组加 工块数
0.000 (该组设定长度无效) ~ 65.53 m
数字式电子称重仪表 技术说明书

D2008F(A、P、P1)数字式电子称重仪表技术说明书2010年04月版●使用前请仔细阅读本产品说明书●请妥善保管本产品说明书,以备查阅目录第一章技术参数 (1)第二章安装联接 (2)一、仪表与数字传感器的连接 (2)二、仪表与大屏幕的连接使用 (2)三、仪表与电脑的连接使用 (2)四、仪表与蓄电池的连接使用 (2)第三章秤台调试步骤简介 (3)第四章数字传感器调试 (3)第一节修改传感器通信地址和秤台数字传感器组秤 (3)第二节修改数字传感器通讯角位 (4)第三节查看各角位内码 (5)第四节角差修正 (5)第五章标定调试 (7)第一节标定 (7)第二节分度值自动切换 (9)第三节标定误差的修正 (9)第六章其他操作 (10)第一节密码管理 (10)第二节定时关机 (11)第三节系统测试 (11)第四节PC通讯参数设置 (11)第五节参数保存及还原 (12)第六节打印参数设置 (12)第七节自定义打印格式设置 (14)第七节仪表文本信息输入与文本信息删除 (17)第六章信息提示 (20)附录A: 通信协议 (21)附录B:称重单格式示例: (24)附录C:明细表及统计报表示例 (25)附录D:仪表出厂默认参数 (25)第一章技术参数1、型号:D2008F(A、P、P1)、D2008FB(A、P、P1)2、数字传感器接口:通信方式RS485信号传输距离最长1000米传输波特率9600、19200 bps激励电源DC12V数字接口能力最多可接16个数字传感器3、显示:7位LED数码管,7个状态指示符。
4、键盘数字键0 ~ 9功能键30个(10个与数字键复合)5、时钟:可显示年、月、日、时、分、秒,自动闰年、闰月;6、大屏幕显示接口传输方式电流环和RS232传输波特率600bps7、串行通讯接口传输方式RS232波特率600/1200/2400/4800/9600/19200可选8、打印接口配置标准并行打印接口,可配接ESPON LQ-300K+Ⅱ、ESPON LQ-300K、ESPONLQ-680K 、ESPON LQ-730K 、ESPON LQ-1600K(+)、KX-P1131、KX-P1121、DS-300等宽行打印机,P带热敏微打,P1带针式微打。
申克INTECONT PLUS 403定量给料机说明书

DEL/DEM 型定量给料机使用说明书(INTECONT PLUS 403仪表)承德市海风机电制造有限责任公司目录第一章概述┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(1)第二章技术参数和功能┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(2)第三章工作原理┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(4)第四章结构┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(7)第五章操作与显示┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(9)第六章参数说明┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(17) 第七章故障信息┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(34) 第八章安装与调试┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(36) 第九章维护与保养┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(38) 附图说明┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(39) 附图1 示意图┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(40) 附图2 接线端子图┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(41) 附图3 电缆线图┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄(42)第一章概述DEL/DEM型定量给料机是我公司引进德国申克(SCHENCK)公司的控制仪表进行生产的、具有先进水平的连续称量给料设备。
DEL/DEM型定量给料机能自动按照预定的程序,依照设定的给料量自动调节流量使之跟踪设定值,以恒定的给料速率连续不断地输送散状物料,实现定量给料、自动计量和累计等功能。
柯力LeiKe-485 浪涌保护器使用说明书

LeiKe-485浪涌保护器使用说明书2021年10月版●使用前请仔细阅读本产品说明书●请妥善保管本产品说明书,以备查阅使用注意事项▲系统连接必须可靠,接地端子、屏蔽线必须可靠接地。
▲在系统通电状态下,所有连接线不允许进行插拔,防止静电损坏仪表或传感器。
▲传感器和仪表都是静电敏感设备,在使用中必须切实采取防静电措施。
▲在雷雨季节,系统必须落实可靠的避雷措施,防止因雷击造成传感器和仪表的损坏,确保操作人员的人身安全和称重设备及相关设备的安全运行。
▲不得在有可燃性气体或可燃性蒸汽的场合使用,不得在有压力的罐装系统中使用。
▲仪表、浪涌保护器和传感器须远离强电场强磁场,远离强腐蚀性物体,远离易燃易爆物品。
▲严禁使用强溶剂(如:苯、硝基类油)清洗机壳。
▲不得将液体或其他导电颗粒注入产品内,以防产品损坏和触电。
◆产品不宜放在粉尘及振动严重的地方使用,避免在潮湿的环境中使用。
◆在插拔仪表与外部设备连接线前,必须先切断仪表及相应设备电源。
◆产品对外接口须严格按使用说明书中所标注的方法使用,不得擅自更改连接。
◆本产品不允许随意打开,否则不予保修。
◆本产品自销售之日起一年内,在正常使用环境下,出现非人为故障属保修范围,请用户将产品及发票复印件(编号相符),寄往特约维修点或经销商进行专业维修。
◆超过保修期以及人为故障或其他意外损坏,生产厂对产品实行收费维修。
由于产品功能改进,印刷版可能与实际产品略有差别,请联系公司获取最新电子版亲爱的用户,感谢您选择柯力公司的产品。
在使用之前,敬请仔细阅读使用说明书。
宁波柯力传感科技股份有限公司地址:宁波市江北投资创业园C区长兴路199号服务热线:400-887-4165800-857-4165传真:*************邮编:315033网址:本公司保留修改说明书的权利宁波柯力传感科技股份有限公司一、型号说明LeiKe-485二、产品用途适用于防护来自于称重系统总线感应到的浪涌干扰引起的仪表RS485接口及称重传感器接口的损坏。
推荐-称重仪说明书 精品
GM8006H称重控制器注意:使用本仪表钱前认真阅读本说明书a:仪表电源进线必须接触良好,不允许出现:手超生锈,接触不好现象。
b:仪表器、通讯、及速度信号等弱电线缆不可与强电电缆同走一个电缆沟。
c:仪表控制柜接地线必须单独接大地。
d:传感器屏蔽接地线必须单独接大地。
仪表控制柜接地传感器屏蔽线接地和强电电气接地。
不能共用一个接地。
e:变频器控制柜必须接大地。
f:变频器控制的电机必须接大地。
g:仪表供电电源严禁与大功率火气大png频繁的电器共相。
本说明说如另有变动,恕不另行通知表一显示参数一级修改参数Y03 给定值<10000KG/分默认值200 K值XXXXX.XX Y04 预控值1 <255 默认值100 给定值<10000KG/分Y05 零点<65535 默认值200 速度值<30000Y06 p 值<100 默认值.20 给定AD 0--65536Y07 I 值<255 默认值10 控制量I <255Y08 预控值2 <255 默认值50 AD值<255Y09 上线零点<255 默认值5 零点<30000总产量XXXXXX.XX吨每米科重<99KG/M速度值2 <3000日期及时间二级修改参数E00 K值xxxx.xx 默认值500.00 E01 周期<999秒默认值60E02 校零时间<999秒默认值60E03 失控停机时间<255秒默认值0E04 自动校零时间<255秒默认值0E05 停机延迟时间<255秒默认值0E06 启动时间<255秒默认值0E07 标定时间<999秒默认值60E08 启动是否校零0,校零,1不校零默认值1E09 称体选择0,1,2,3,分别对应恒速,调速默认值0E10 启动选择0,本机;1,远程1;2,远程2 默认值0E11 给定选择0,本机;1,远程;2,485 默认值0E12 程控放大倍数0,1,2 分别对应1倍2倍4倍默认值0E13 计量单位选择1,KG;0,吨默认值1 E14 波特率0,1,2,3,E15 停机是否累计0不累计;1累计E16 速度零点0-255E17 标定砝码重量<10000KGE18 日期年,月,日E19 时间时,分,秒E20 远程给定输入量最大值<10000KG/分默认值500KG E21 远程流量输出量最大值<10000KG/分默认值500KG E22 远程给定上限10-20mA对应65536 默认值12228 E23 远程给定下限0—4mA对应0-xxxxx 默认值2278 E24 流量输出上限1023对应10-20mA 默认值891E25 流量输出下限0xxx对应0-4mA 默认值178E26 自动停机1到给定自动停机,0反之默认值0E27 设备地址<255 默认值0E28 计量选择0,启动开始计量1端口控制开始量默认值0E29 报警选择0,报警开放1报警关默认值0E30 控制步距<30 默认值10E31 序列号1 默认值E32 序列号2 默认值E33 一周总脉冲数默认值5000 E34 称体有效计量段长度<99米默认值0.6E35 皮带周长单位:米默认值4.0 E36 提前量1 单位KG 默认值5.0 E37 显示选择下排显示选择显示累积量或给定默认值0E38 累计输出脉冲<10000KG 默认值100 E39 提前量2 单位:KG 默认值3.0 E40 班次1—累计一班,2—累计二班,3—累计三班默认值3E41 自动打印选择0—是1—否默认值1E42 一班换班时间0-2359 默认0800 E43 1600 二班换班时间0-2359 默认值1600 E44 2359三班换班时间0-2359 默认值2359 E45 15.00 流量报警上限0-65535 默认600E46 流量报警下限0-65535 默认值15.00 E47 流量滤波<10 0否;1是默认值0GM8006C称重控制器操作使用说明一:简介GM8006H系列简称称重控制器采用国际最近技术研制和生产的新一代配料仪表,是静态,动态计量和配料的专用称重仪表。
巨鹰Giant204 四通道称重模块 用户手册说明书

Giant204四通道称重模块用户手册 V1.0目录1 技术支持 (3)2 产品介绍 (4)3 技术参数 (5)4 外形尺寸,电气连接以及选型 (6)4.1 外形尺寸 (6)4.2 电气连接与说明 (6)4.2.1 称重传感器连接 (7)4.2.2 指示灯 (8)4.2.3 通信接口RS232/RS485 (8)4.3 选型 (8)5 显示与按键 (9)6 功能与设置 (10)6.1 主界面显示与功能 (11)6.1.1 相关指令 (12)6.2功能菜单 (15)6.2.1 相关指令 (16)6.3校准菜单 (21)6.3.1 校准方式选择菜单 (21)6.3.2 实物校准菜单 (22)6.3.3 数字校准菜单 (24)6.3.4 相关指令 (25)6.4 参数保存菜单 (27)6.4.1相关指令 (27)6.5 显示设置菜单 (28)6.5.1相关指令 (28)6.6 通信设置菜单 (29)6.6.1 相关指令 (30)7 MODBUS通讯协议 (33)8用户设置软件 (40)8.1 软件安装与启动 (40)9 附件 (41)9.1 仪表显示的错误代码 (41)9.2 基本术语 (41)9.3 标准ASCII码 (42)1 技术支持感谢您选择并使用大连哲勤科技有限公司产品,此用户手册协助您了解并正确使用设备。
如需订购产品、技术支持、以及产品信息反馈,请通过以下方式联系我们。
请在联系时附注设备的购买时间,购买方式,联系人信息,地址以及电话等相关信息,便于我们为您服务。
网址E-Mail**************电话+86-411-66831953, 4000-511-521传真+86-411-82388125版本控制2 产品介绍Giant204四通道称重变送器是面向工业控制领域的重量变送器,集四个高速称重通道,RS485和RS232通信接口于一体(Modbus-RTU通信协议),同时进行四个重量的独立并行高速检测。
申克仪表说明书
申克仪表说明书1、目录1、概述 (1)讲述皮带秤操作原理及具体情况,如“出料点供料”。
什么是INTECONT? (1)详细资料 (1)定义 (1)计量原理 (1)控制 (2)输入和输出 (3)2、技术数据和字符 (5)本章简要介绍INTECONT 所用全部数据和所有可能发生的情况。
技术数据 (5)接口 (6)对话语言、单位 (7)显示、指示灯 (7)程序设置、标定 (8)3、程序设置 (9)程序设置功能便于以少量的运算完成秤体计量要求。
功能分配 (9)标定功能 (9)皮带环行LB (10)除皮TW (10)置零 (11)砝码检查CW (12)模拟方式 (13)时间设置.......................................... 13 4、服务值 (14)服务值信号适用外部线缆、输入、输出转换和负荷传感哭负载等检查。
另外,SPC值(生产过程控制统计)可用于喂料记录等方面。
5、参数 (15)确定设备特性,参数可满足特殊要求,甚至在停电时,他们亦能无限期的存贮。
总述 (17)调入参数 (17)装入初始参数 (18)参数概述 (19)注解参数表 (22)6、出现事件信号后错误诊断(故障信息) (45)大多数错误以及大部分操作状态均以事件信号的形式出现。
错误查询表帮助操作者迅速找出错误并及时恢复正常操作状态。
系统信息S…S9 (45)物料流量B…B9 (45)电气系统E…E5 (46)标定C1…C3 (46)最大值H1…L4 (46)最小值L1…L4 (47)信号灯 (47)7、使用 (48)全面介绍,逐步解释了应该进行的工作。
另外,你还会发现可能隐含的错误。
操作学习 (48)机械要求 (49)电器要求 (49)输入参数 (50)控制 (51)功能检查 (52)标定 (53)用砝码检查 (53)带速检查 (54)物料检查 (54)测试插座 (55)机械部分安装与调试 (55)1、概述什么是INTECONT?INTECONT PLUS是用于计量、控制、喂料设备的计量计算系统。
电子称重仪说明书

1
600
1.25
250
信号SIG
24
50
0.8
4000
0.3
250
三、外形示意图、前面板布置、安装、接线
1. 外形示意图
4
2. 前面板示意图
8110E
kg t
动态
上限
下限
运行
零区
锁零
EX
回零
切换
设置
停机/↓
启动/↑
余姚太平洋称重工程有限公司
3. 安装 3.1 在允许的使用环境条件下,安装在固定支架或墙面上。 3.2 安装注意事项
2.6 急停控制
面板上的急停按钮,用于紧急停止配料控制
3. 功耗:≤10VA 4. 重量:≤18kg 5. 安装形式及尺寸 墙挂式:外形尺寸
安装尺寸
360×460×110(宽×高×深) 330×240 如下图所示
2
360
330
300
Φ11
460 240
110
R15
242
50 50 50 50
6. 使用环境条件 6.1 电源:
波特率: 300bps、600bps、1200bps、2400bps、4800bps、9600bps 可选
数据格式: 7 位数据偶校验
地址: 1~125 可选
2.3 3路继电器输出接口
输出为常开触点(250V 10A)
2.4 显示器
5 位红色 0.8 英寸 LED 数码管
2.5 3路开关量输入接口
三路开关量输入分别作为启动、停机及回零或放料输入
7. 主要功能 7.1 自动标定和手动标定功能;
7.2 菜单方式各种参数设定和选择功能;
7.3 可编程数字滤波功能;
智能型称重控制仪说明书(带通讯变送)
智能型称重控制仪说明书(带通讯变送)本厂产品是以单片微型计算机为核心、大规模集成电路为外围部件组成的高精度测控仪表,软、硬件采用多种抗干扰技术,采用EEPROM存储现场的工作数据,具有停、掉电数据不丢失,使用可靠性高的特点。
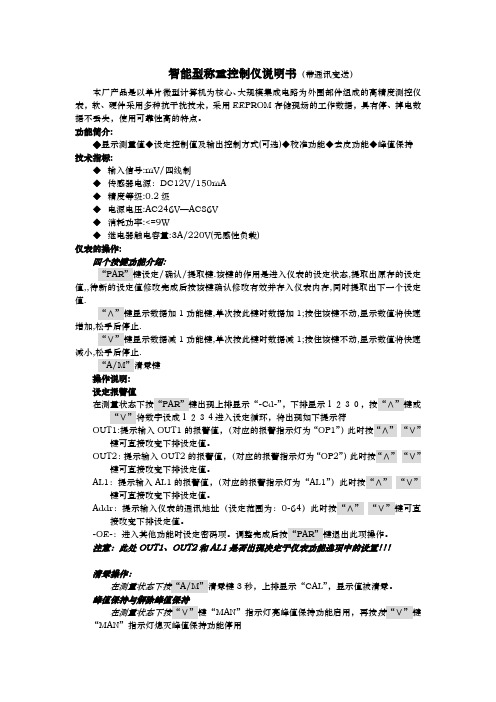
功能简介:◆显示测量值◆设定控制值及输出控制方式(可选)◆校准功能◆去皮功能◆峰值保持技术指标:◆输入信号:mV/四线制◆传感器电源:DC12V/150mA◆精度等级:0.2级◆电源电压:AC246V—AC86V◆消耗功率:<=9W◆继电器触电容量:3A/220V(无感性负载)仪表的操作:四个按键功能介绍:“PAR”键设定/确认/提取键.该键的作用是进入仪表的设定状态,提取出原存的设定值,,待新的设定值修改完成后按该键确认修改有效并存入仪表内存,同时提取出下一个设定值.“∧”键显示数据加1功能键,单次按此键时数据加1;按住该键不动,显示数值将快速增加,松手后停止.“∨”键显示数据减1功能键,单次按此键时数据减1;按住该键不动,显示数值将快速减小,松手后停止.“A/M”清零键操作说明:设定报警值在测量状态下按“PAR”键出现上排显示“-Cd-”,下排显示1230,按“∧”键或“∨”将数字设成1234进入设定循环,将出现如下提示符OUT1:提示输入OUT1的报警值,(对应的报警指示灯为“OP1”)此时按“∧”“∨”键可直接改变下排设定值。
OUT2:提示输入OUT2的报警值,(对应的报警指示灯为“OP2”)此时按“∧”“∨”键可直接改变下排设定值。
AL1:提示输入AL1的报警值,(对应的报警指示灯为“AL1”)此时按“∧”“∨”键可直接改变下排设定值。
Addr:提示输入仪表的通讯地址(设定范围为:0-64)此时按“∧”“∨”键可直接改变下排设定值。
-OE-:进入其他功能时设定密码项。
调整完成后按“PAR”键退出此项操作。
注意:此处OUT1、OUT2和AL1是否出现决定于仪表功能选项中的设置!!!清零操作:在测量状态下按“A/M”清零键3秒,上排显示“CAL”,显示值被清零。
杭州顶松自控设备有限公司多功能可编程称重控制器使用说明书

DS822-P8S(4821)杭州顶松自控设备有限公司浙制00000505号使用说明书 (中文版V1.0) 多功能可编程称重控制器目录一. 简介 (1)二. 主机与配件结构尺寸 (2)2.1 仪表安装尺寸图 (2)三. 主机与配件接口布局 (2)3.1 仪表接口布局 (2)四. 仪表端口连接方法 (3)4.1 普通开关量输入口 (3)4.2 继电器输出口 (4)4.3 高速脉冲输入口 (4)4.4 晶体管OC门连接大屏幕显示器 (4)4.5 晶体管OC门控制步进电机 (5)4.6 晶体管OC门作普通输出口 (5)4.7 模拟量输出口 (5)4.8 模拟量输入口 (5)4.9 称重传感器输入口 (6)4.10 通信接口 (7)五. 参数设置 (8)5.1 显示面板设定按键的功能及操作 (8)5.2 仪表参数简介 (9)5.3 密码管制及允许的操作项目 (9)5.4 密码登录的操作步骤 (9)5.5 F参数设置及速查表 (10)5.5 P参数设置 (12)六. 仪表称重标定 (13)6.1 实物标定 (13)6.2 计算法标定 (14)七. 其他工作参数的设置 (15)7.1 全功能通信口参数设置及协议 (15)7.2 高速脉冲输入口做普通输入口 (15)7.3 晶体管OC门做大屏幕输出口 (15)7.4 模拟量输出口校准与设置 (16)7.5 模拟量输入口校准与设置 (16)7.6 修改登录密码 (17)7.7 面板显示内容的设置 (18)7.8 定时关机功能 (18)7.9 输入输出位置调整 (19)八. 仪表检测及其他操作 (20)8.1 仪表测试功能 (20)8.2 仪表开机自检及故障显示代码 (20)8.3 仪表重量置零及清除总累计量 (21)8.4 流程的启动与退出 (22)8.5 恢复出厂设置 (22)九. 附录 (23)附录1 顶松通信协议 (23)附录2 连续发送方式命令 (29)附录3 Modbus RTU通信功能码表 (30)一. 简介DS822-P8S(4821)是一款单秤分体式可编程称重控制器,可接入一路称重传感器,主机采用标准导轨式安装,可直接连接触摸屏作为人机接口, 也可接本公司生产的显示面板。
403仪表说明书

3C403使用说明书适用于控制各种型号电子皮带秤可以连接任何型号的DCS系统适用于控制各种型号定量给料秤仪表计量精度0.05%3C403使用说明书第一章简介1、注意事项A、仪表的接地线严禁接零线或与其它电器共用地线,必须独立良好接地。
B、供电电源严禁与大功率或启动频繁的设备共用。
C、保护好仪表的操作前板,不禁用硬物划刮或高温烫损。
D、非专业维修人员严禁打开机箱。
E、打开机箱前必须保证拔下电源插头。
F、供电电源上的接线必须接触良好,不得有似接非接的情况。
2、概述3C403控制仪表是专用于重量自动计量及控制的场合,它可以配接多种机械秤体,具有运行可靠,操作简便,维护量少。
配有多个模拟量和开关量输入输出接口,可以方便的与DCS控制系统及PLC系统连接,并可以多种方式组合使用。
3、系统性能A、专用工业级控制芯片,系统稳定、运行可靠。
B、密码保护功能,有效保护运行数据,重要参数防止随意修改。
C、美国进口专用芯片组装(CPLD),超大规模集成电路。
D、环境温度:0℃∽45℃。
E、计量精度:优于0.05%。
F、显示/键盘:14位+8位LED,18键平面键盘,单LED工作状态指示。
G、可以控制多种计量秤体。
H、模拟量和开关的输入、输出全光电隔离。
I、多路模拟量和开关量输入、输出。
J、脉冲/模拟速度输入。
K、外部开关量启动、停机、计量开始、故障确认。
L、0∽10mA,0∽20mA或4∽20mA外部流量设定输入(全隔离输入)。
M、0∽10mA,0∽20mA或4∽20mA当前瞬时流量输出(全隔离输出)。
N、吨脉冲计数输出(全隔离输出)。
O、触点输出:报警、上限、下限、运行、上电备妥。
P、开关量输入:启动(常开)、停机(常闭)、计量开始(常开)。
Q、可选配打印机打印报表。
4、技术指标A、供电电源:AC220V±10%30W 50HZ/60HZ。
B、下料控制输出:DC0∽5V。
C、传感器接口:供电:DC10V/120mA 输入:0∽60mV。
四多功能参数测试仪说明书正文正确样本
PD802-M4S型多功能电力监测仪顾客使用手册版本:1.2杭州正普科技有限公司使用前必读在您使用PD802-M4S型多功能电力监测仪之前,请务必仔细阅读本顾客使用手册内容,并可以完全理解其中含义、对的按照顾客手册指引操作,这会有助于您更好地使用PD802-M4S型多功能电力监测仪,并有助于解决现场浮现各种问题。
1、监测仪在施加工作电源之前,务必保证工作电源在仪表规定范畴之内;2、现场安装使用时,电流输入端子禁止开路,电压输入端子禁止短路;3、通讯端子(RS485)禁止施加高压;4、使用时务必保证仪表可靠接地(FG端子为接地端);5、使用时仪表接线方式务必与内部系统设立方式一致;6、与后台通讯时,仪表通讯参数务必与后台一致;7、本顾客使用手册中信息如有变动,恕不另行告知;8、本顾客使用手册中信息受版权保护,其中任何某些未经我公司事先书面承认,不得以任可形式翻印或复制。
我公司自始至终本着“质量第一服务第一”宗旨,将以优质产品、优良服务奉献给国内外顾客!●使用前请仔细阅读本顾客使用手册●请注意妥善保存目录一、概述--------------------------------------------------------- 1二、典型应用----------------------------------------------------- 1三、功能简介----------------------------------------------------- 1四、技术指标----------------------------------------------------- 2五、操作阐明----------------------------------------------------- 3六、通讯规约----------------------------------------------------- 6七、外形及安装尺寸----------------------------------------------- 12八、端子接线------------------------------------------------------ 12一、概述PD802-M4S型多功能电力监测仪是一种用于电力质量监测抱负设备。
FIP0403称重控制仪说明书RS
显示事件
Display Check
显示检查
STOP/START Prefeeder 停止/启动预给料机
Service Values
服务数值
START/STOP VOLUM. MODE 启动/停止体积方式
START/STOP KEYB. MODE 启动/停止键盘方式
Select Batch
批处理
>0: Zero Set
出厂值:
1.000
最小值:
0.0100
最大值:
2.0000
称重传感器与称重托辊负荷之比。
F=C07 • Q Q:平台负荷,F:称重传感器负荷。
C08 角度 a
出厂值:
0.0degr
最小值:
0.0degr
最大值:
25.00degr
给料机安装后的倾角,此角即为给料机纵向中心线的倾角。
C09 检测重量 砝码或标定棒 2 倍重量值输入
---.---kg
FMZ1 脉冲宽度
出厂值:
0 ms
最小值:
50 ms
最大值:
1000 ms
给外部计数器的输出脉冲宽度。
FMZ2 单位
出厂值:
-------t
可选参数: -----.-t
----.—t
---.---t
------ t*10
------ t*100
-------kg
FMZ3 单位
出厂值:
POWER OK 所有电源供电正常,信号灯亮。
CPU OK 微处理器就绪,信号灯亮。
ALARM 如果有报警事件发生,信号灯亮。
LIMIT VALUE1 如果预置的极限值超过下限值,信号灯亮。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录第一章概述 (1)第二章控制 (4)第三章系统参数 (10)第四章效验与标定 (24)第五章系统服务值 (27)第六章事件信息 (28)第七章安装与调整 (31)第八章维护 (33)通讯协议第一章概述一、FIP-403称重控制仪FIP-403是DEL/DEM定量给料机的测量和控制系统。
本说明书涉及配有传送皮带的控制系统。
1.称重给料机通过调节皮带速度来控制给料速率。
2.控制预给料机的皮带秤通过调节皮带负载来控制给料速率。
3.具有恒定负载的皮带秤通过控制传送带速度来调节皮带负载。
二、显示5×7点阵规格,6mm高字符上部显示左侧:运行信息右侧:设定的给料速率,单位为kg/h或t/h下部显示左侧:事件信息右侧:可设定给料速率、皮带速度等三、信号灯2个绿色和3个红色LED。
绿色信号灯:就绪待用红色信号灯:错误或极限值信息四、键盘微动开关启动或停止。
预选下部显示;功能选择。
复位计数器。
FUNC 调用功能菜单和事件信息正文。
DEL 确认事件信息;删除输入。
ESC 中止功能。
ENT 启动功能;确认输入。
DAT 准备输入,如输入设定值。
输入参数。
输入符号和小数点。
五、符号定义I = 给料速率单位:kg/h或t/h在单位时间里从皮带上卸下的物料数量。
P = 给料速率设定值单位:kg/h或t/hZ = 给料速率单位:kg或t给料数量=给料速率×给料时间。
V = 传送皮带速度单位:m/sQ = 皮带负载单位:kg/m每米传送皮带上的物料重量。
重量测定:受控方式体积测定:非受控方式六、测量原理连续测量传送带负载Q和传送带速度V,并将二者相乘,乘积便是给料速率,进而可计算出给料数量。
I kg/hQ kg/mV m/s第二章控制一、上电上电出现故障期间·计数器读数·计数器脉冲无输出·预选项正常显示服务值等,如ON-time以上各项能持续保持。
通电后,系统先自动测试显示和信号灯状况,然后显示系统的版本号几秒钟,接着才出现正常显示。
二、信号灯POWER OK所有电源供电正常,信号灯亮。
CPU OK微处理器就绪,信号灯亮。
ALARM如果有报警事件发生,信号灯亮。
LIMIT VALUE1如果预置的极限值超过下限值,信号灯亮。
LIMIT VALUE2如果预置的极限值超过上限值,信号灯亮。
就绪运行(READY TO OPERATE)两绿色信号灯应亮,没有报警信息。
三、正常显示上部显示左侧:旋转的点为运行信息称重器已启动并已对称重器的物料数量累加,给料速率给定。
如果称重器停止工作(该点静止不动),仅测量皮带负载和皮带速度。
运行信息以外的其它特殊显示:空(Empty) = 重量测量方式v = 体积测量方式键盘控制方式如果同时选择键盘和体积方式,“V”在键盘符号出显示。
右侧:有效设定值 P =下部显示左侧:事件信息代码右侧:可选择显示计数器 Z1计数器 Z2计数器 Z3给料速率 I给料速率 Ir皮带负载 Q皮带负载 Qr皮带速度 V偏差 xd外部设定值 Pe比例设定值 Pr四、正常操作控制启动称重器条件:必须有外部释放信号,如果没有,事件信息输出S2。
特点:在显示区域上部左侧出现旋转的点。
停止测量特点:点静止不转皮带负载和皮带速度继续测定修改设定值输入数字P = ____________ kg/h 或Pr= ____________ %删除单一数字确认输入中止输入计数器清零输入所需清零的计数器号码,计数器3不能清零,在溢出的情况下,计数器从零开始。
确认输入删除错误字符取消输入或因不慎按下删除键造成的错误输入。
预选择下部显示确认事件信息调用其它功能退出功能菜单五、事件信息定义称重器的所有功能都在内部受到监控,如有故障,将被输出作为事件信息。
事件代码显示在下部左侧。
事件被分别分类如下,事件级别可以任意分配:报警(ALARM)红色报警灯亮并闪烁,计数器停止。
警告1(WARING 1)显示事件,计数器继续计数。
警告2(WARING 2)显示事件,计数器继续计数。
忽略(IGNORE)事件未受监控。
操作排除故障后,确认事件信息。
调用功能分配表。
将“Display Events”功能滚动进入下部显示区选择功能。
按动光标键查看各种参数。
恢复正常显示。
事件列表S2:No ReleaseC1:L/C InputH1:I > MAXH2:Load > MAXH3:v > MAXH4:L/C Input > MAXL1:I < MINL2:Load < MINL3:v < MINL4:L/C Input < MINI = 给料速率v = 皮带速度L/C = 压力传感器负荷六、功能分配表通过功能分配表调用设定程序。
调用功能分配表如果没有事件,显示器将显示上次选择的功能,否则,显示功能为“DisplayEvents”进入功能。
恢复正常显示或终止。
在分配表中滚动。
Functions(功能)子菜单Display Events 显示事件Display Check 显示检查STOP/START Prefeeder 停止/启动预给料机Service Values 服务数值START/STOP VOLUM. MODE 启动/停止体积方式START/STOP KEYB. MODE 启动/停止键盘方式Select Batch 批处理>0: Zero Set 零设置Programming 参数编程Calib.Functions 校准功能Print FMZ 打印计数器读数Programming(参数编程)子菜单Read Parameters 读参数Enter Parameters 输入参数Load Default Par. 调入出厂预设参数Print Parameters 打印参数Print Stat. Rep. 打印状态参数Calib.Functions(校准功能)子菜单TW: Tare 检测皮重CW: Weight Check 称重检查LB: IMP/Belt 脉冲/皮带循环Set Time 设定时间START/STOP SIMULATION 启动/停止模拟第三章系统参数参数是具有可变特性的数据,利用这些数据可以使系统运行时更适合现场工况要求,所有参数出厂时有预定值,这些都是有用的建议值。
参数被划分为A...Q功能组,字母后的数字是参数的序号,参数分为数值和选择项两种类型。
1、读参数调分配功能选程序功能(Programming)进入下显示区。
确认选读参数功能(Read Parameters )确认选择参数功能块确认选组内参数并确认按一次此键,返回到选参数组;再按一次,回到工作状态显示。
2、输入和修改参数调分配功能选程序功能进入下显示区确认选输入参数进入下显示区(Enter Parameters )确认输入密码07734显示参数组A选择参数组确认选参数序号确认准备输入和修改参数选参数的选择项并输入参数值确认输入值删除单个数值中断输入3、装入缺省值(Load Default Par.)调用此功能后,仪表内参数恢复到出厂值初始状态。
4、参数表A组对话状况A01 语言英语A02 单位 SIB组额定数据B01 流量单位 P出厂值: -------kg /h可选参数: -------kg/h-----.-kg/h----.—kg/h---.---kg/h-------t/h-----.-t/h----.—t/h---.---t/hB02 额定流量 I出厂值: 10.0000t/h最小值: 0.0020t/h最大值: 99999.9t/h用于极限值和服务数值的标准。
B03 转速测量有效出厂值: YES可选参数: YESNOB04 速度传感器特征值=(每秒脉冲数×运行一周时间)÷皮带长度(m )出厂值: 10000I/m最小值: 10.00I/m最大值: 100000I/m皮带每运行一米时速度传感器在所输出的脉冲数。
B05 额定速度出厂值: 0.10 m/s最小值: 0.0100 m/s最大值: 10.000m/s用于极限值的参考值。
B06 启动源出厂值: KEYB可选参数: KEYBSER可选键盘或串行接口B07 设定值源出厂值:键盘可选参数:键盘模拟B08 外部设定值有效出厂值: NO可选参数: YESNOB09 负载传感器工作出厂值: NO可选参数: YESNOB10 FMZ1单位出厂值: -------t可选参数: -----.-t----.—t---.---t-------kg-----.-kg----.--kg---.---kg B11 FMZ1脉冲宽度出厂值: 0 ms最小值: 50 ms最大值: 1000 ms给外部计数器的输出脉冲宽度。
B12 FMZ2单位出厂值: -------t可选参数: -----.-t----.—t---.---t------ t*10------ t*100-------kgB13 FMZ3单位出厂值: -------t可选参数: -----.-t----.—t---.---t------ t*10------ t*100-------kgB14 VFD亮度调节出厂值: 1 LEVEL可选参数: 2 LEVEL3 LEVEL4 LEVELC组校验和计算数据C01 电源频率出厂值: 50Hz可选参数: 50Hz60HzC02 皮带周期数出厂值: 1最小值: 1最大值: 100确定调零、自重和称重校验的运行时间。
但不用于自动调零。
C03 皮带周期时间出厂值: 30.0s最小值: 1.0s最大值: 9999.0s确定:“Imp /皮带循环周期”程序的运行时间,一般选皮带运行三周的时间。
C04 L/C灵敏度出厂值: 2.0000mV/V最小值: 0.5000mV/V最大值: 9.9999mV/VL/C:称重传感器,按L/C技术参数输入。
C05 L/C 额定负荷出厂值: 50.0kg最小值: 0.5kg最大值: 22000.0kg称重传感器的额定负荷。
C06 有效平台长度出厂值: 0.300m最小值: 0.1000m最大值: 50.000mC07 杠杆比出厂值: 1.000最小值: 0.0100最大值: 2.0000称重传感器与称重托辊负荷之比。
F=C07 • Q Q:平台负荷,F:称重传感器负荷。
C08 角度a出厂值: 0.0degr最小值: 0.0degr最大值: 25.00degr给料机安装后的倾角,此角即为给料机纵向中心线的倾角。
C09 检测重量砝码或标定棒2倍重量值输入出厂值: 10.0kg最小值: 1.000kg最大值: 22000.0kg用砝码或标定棒替代物料压在平台上的负荷。