结构力学位移法题及答案教学内容
结构力学课后习题解答:9矩阵位移法习题解答.docx

第9章矩阵位移法习题解答习题9.1是非判断题(1)矩阵位移法既可计算超静定结构,又可以计算静定结构。
()(2)矩阵位移法基本未知量的数目与位移法基本未知量的数目总是相等的。
()(3)单元刚度矩阵都具有对称性和奇异性。
()(4)在矩阵位移法中,整体分析的实质是建立各结点的平衡方程。
()(5)结构刚度矩阵与单元的编号方式有关。
()(6)原荷载与对应的等效结点荷载使结构产生相同的内力和变形。
()【解】(1)正确。
(2)错误。
位移法中某些不独立的杆端位移不计入基本未知量。
(3)错误。
不计结点线位移的连续梁单元的单刚不具奇异性。
(4)正确。
(5)错误。
结点位移分量统一编码会影响结构刚度矩阵,但单元或结点编码则不会。
(6)错误。
二者只产生相同的结点位移。
习题9.2填空题(1)矩阵位移法分析包含三个基本环节,其一是结构的,其二是分析,其三是分析。
(2)已知某单元的定位向量为[3 5 6 7 8 9]七则单元刚度系数炫应叠加到结构刚度矩阵的元素中去。
(3)将非结点荷载转换为等效结点荷载,等效的原则是。
(4)矩阵位移法中,在求解结点位移之前,主要工作是形成矩阵和_________________ 列阵。
(5)用矩阵位移法求得某结构结点2的位移为4=[. V2 ft]T=[0.8 0.3 0.5]T,单元①的始、末端结点码为3、2,单元定位向量为尸>=[0 0 0 3 4 5]T ,设单元与x轴之间的夹角为a =买,则2 尹> =O(6 )用矩阵位移法求得平面刚架某单元在单元坐标系中的杆端力为F e =[7.5 -48 -70.9 -7.5 48 -121.09]T ,则该单元的轴力心=kN。
【解】(1)离散化,单元,整体;(2)灯8;(3)结点位移相等;(4)结构刚度,综合结点荷载;(5)[0 0 0 0.3 -0.8 0.5]。
(6)-7.5o离、空的值以及K ⑴中元素妍、愚、姒的值。
【解】各刚度系数的物理意义如习题解9.3图所示。
结构力学静定结构位移计算习题解答

6-1 求图示桁架AB 、AC 的相对转角,各杆EA 为常量。
解:(1)实状态桁架各杆的轴力如图(b )所示。
(b)(a)N(d )(c)题6-1N N(2)建立虚设单位力状态如(c )所示,求AB 杆的转角。
1113(2)82i P iAB i i P a P a P a N N l P a a a E A EA EA EA EAϕ⋅⋅⋅⋅-⋅-⋅⋅⋅==++⨯=∑(↺)(3)建立虚设单位力状态如(d )所示,求AC 杆的转角。
113(2)()(72i P i AC i iP a P a N N lPa a E A EA EA EAϕ⋅⋅⋅-⋅-⋅⋅==+⨯=∑(↺)故,AB 、AC 的相对转角为两杆转角之差:8(7(10.414AB AC P P P PEA EA EA EAϕϕϕ+-=-=-==-(夹角减小)6-2 求半圆曲梁中点K 的竖向位移。
只计弯曲变形。
EI 为常数。
方法一 解:(1)荷载作用下的实状态的约束反力如图(a )所示。
以任意半径与水平坐标轴的顺时针夹角为自变量,其弯矩方程为:sin (0)P M θθπ=-≤≤Pr(2)建立虚设单位力状态如(b )所示,其弯矩方程为:[]1cos )(0)2211cos()cos )()222i M πθθππθθθπ⎧≤≤⎪⎪=⎨⎪-=≤≤⎪⎩(r -r r -r (r +r(a)题6-2(3)积分法求半圆曲梁中点K 的竖向位移。
20233220022311cos )(sin )cos )(sin )2211cos )sin cos )sin sin sin 2)sin sin 2)2222cos 2i V Pk Pr Pr M M ds rd rd EIEI EI Pr Pr d d d d EI EI Pr EI πππππππππθθθθθθθθθθθθθθθθθθθ⋅-⋅-⋅∆==+⎡⎤⎡⎤=-⋅+⋅=-+⋅⎢⎥⎢⎥⎣⎦⎣⎦=-∑⎰⎰⎰⎰⎰⎰⎰(r -r (r +r (-(+(-(+(-11320211cos 2)cos cos 2)442Pr EI πππθθθ⎡⎤⎢⎥+-+=-↑⎢⎥⎣⎦()( 方法二:本题也可以只算纵向对称轴左边,再乘2。
结构力学-第7章-位移法习题答案
1 2
ql
1 12
ql 2
/ l
7 12
ql
由位移法方程得出:
r11Z1
R1 p
0
Z1
7ql 4 348EI
作出最终 M 图
7-9 试不经计算迅速画出图示结构的弯矩图形。
(a)
B
θA A
(b)
C B
yB
B′
A
C
题 7-9 图 7-10 试计算图示有剪力静定杆的刚架,并绘出 M 图。
13EI l
, r12
r21
3EI l2
r22
18EI l2
R1 p
1 16
ql 2 , R2 p
ql
代入,解得
Z1
66 3600
ql3 EI
,
Z2
211 3600
ql 4 EI
(4)求最终弯矩图
(e)
50kN·m
80kN·m 10kN·m 20kN
A 2EI B EI C
EI
(b)
B
3EI
C
EI
EI
A
D
Δ l
l
解:(1)求 M1, M 2 , M 3, M p 图。
(2)由图可知:
r11
16i, r12
r21
6i, r23
r32
6i l
, r22
16i, r33
24i l
R1 p
0, R2 p
结构力学4静定结构的位移计算习题解答

第4章 静定结构的位移计算习题解答习题 是非判定题(1) 变形体虚功原理仅适用于弹性体系,不适用于非弹性体系。
( ) (2) 虚功原理中的力状态和位移状态都是虚设的。
( )(3) 功的互等定理仅适用于线弹性体系,不适用于非线弹性体系。
( ) (4) 反力互等定理仅适用于超静定结构,不适用于静定结构。
( ) (5) 关于静定结构,有变形就必然有内力。
( ) (6) 关于静定结构,有位移就必然有变形。
( )(7) 习题(7)图所示体系中各杆EA 相同,那么两图中C 点的水平位移相等。
( ) (8) M P 图,M 图如习题(8)图所示,EI =常数。
以下图乘结果是正确的:4)832(12ll ql EI ⨯⨯⨯ ( )(9) M P 图、M 图如习题(9)图所示,以下图乘结果是正确的:033202201111)(1y A EI y A y A EI ++ ( )(10) 习题(10)图所示结构的两个平稳状态中,有一个为温度转变,现在功的互等定理不成立。
( )(a)(b)习题 (7)图图(b)M图(a)M P 81qM 图(b)P M 图(a)习题 (8)图 习题 (9)图(a)P习题 (10)图【解】(1)错误。
变形体虚功原理适用于弹性和非弹性的所有体系。
(2)错误。
只有一个状态是虚设的。
(3)正确。
(4)错误。
反力互等定理适用于线弹性的静定和超静定结构。
(5)错误。
譬如静定结构在温度转变作用下,有变形但没有内力。
(6)错误。
譬如静定结构在支座移动作用下,有位移但没有变形。
(7)正确。
由桁架的位移计算公式可知。
(8)错误。
由于取0y 的M 图为折线图,应分段图乘。
(9)正确。
(10)正确。
习题 填空题(1) 习题(1)图所示刚架,由于支座B 下沉∆所引发D 点的水平位移∆D H =______。
(2) 虚功原理有两种不同的应用形式,即_______原理和_______原理。
其中,用于求位移的是_______原理。
结构力学(5.1.2)--位移法习题及参考答案
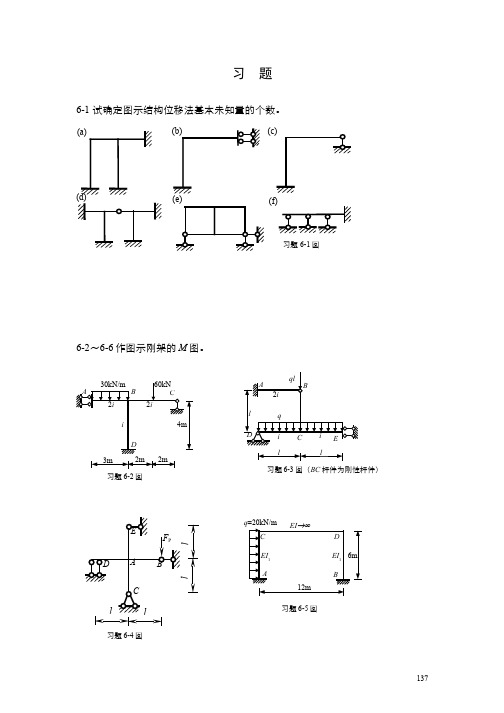
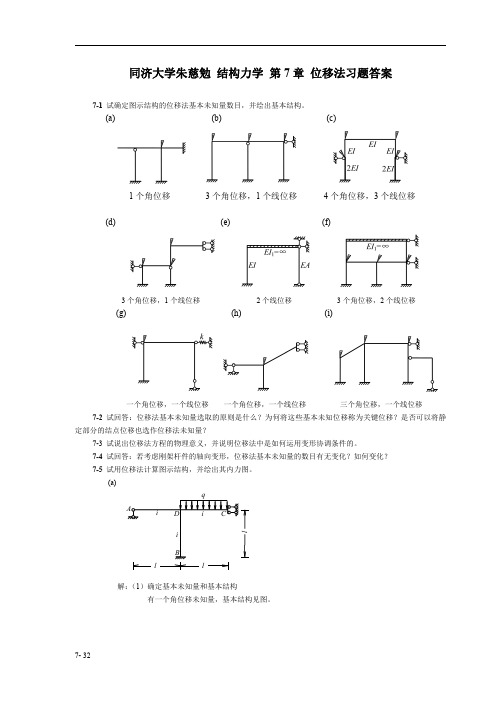
习 题6-1 试确定图示结构位移法基本未知量的个数。
6-2~6-6作图示刚架的M 图。
(a)(f)习题6-1图(d)习题6-2图习题6-5图习题6-3图(BC 杆件为刚性杆件)习题6-4图6-6 试用位移法计算图示结构,并作内力图。
6-7 试用位移法计算图示结构,并作内力图。
6-8 试用位移法计算图示结构,并作内力图。
EI 为常数。
6-9试用位移法计算图示结构,并作弯矩图。
EI 为常数。
6-10 试用位移法计算图示结构,并作弯矩图(提示:结构对称)。
习题6-9图习题6-7图6-11作图示刚架的体系内力图。
6-12 设支座 B 下沉0.5cm B D =,试作图示刚架的M 图。
6-13如图所示连续梁,设支座C 下沉淀1cm ,试作M 图。
6-14图示等截面正方形刚架,内部温度升高+t°C ,杆截面厚度h ,温度膨胀系数为 ,试作M 图。
10 kN/m( a )( b)40 kN习题6-10图BGH习题6-11图(a )(b )q6-15试作图示有弹性支座的梁的弯矩图,332EIk l=,EI =常数。
6-16 试用弯矩分配法计算图示连续梁,并作M 图。
6-176-18 用力矩分配法计算图示结构,并作M 图。
6-19 已知图示结构的力矩分配系数1238/13,2/13,3/13,A A A m m m ===作M 图。
6-20 求图示结构的力矩分配系数和固端弯矩。
已知q=20kN/m,各杆EI 相同。
习题6-17图习题6-13图习题6-14图6-21~6-22 用力矩分配法计算图示连续梁,作M 图,并计算支座反力。
EI=常数。
6-23~6-25用力矩分配法计算图示刚架,作M 图。
EI=常数。
参考答案6.1 (a) 2 (b) 1 (c) 2 (d) 3 (e) 6 (f) 26.2 15BD M =kN·m (右侧受拉)20kN/m 40kN习题6-22图习题6-21图15kN/m习题6-23图F P =10kN 习题6-24图习题6-25图6.321112AB M ql =(上侧受拉)6.4P 0.4AD M F l =(上侧受拉)6.5150AC M =kN·m (左侧受拉)6.651.3AB M =kN·m (左侧受拉)6.780AB M =kN·m (上侧受拉)6.816.9AB M =kN·m (左侧受拉)6.9 (a) 10.43CA M =kN·m (左侧受拉) (b) 56.84CE M =kN·m (下侧受拉)6.10 (a) 8.5AB M =kN·m (上侧受拉) (b) 34.3AC M =kN·m (左侧受拉)6.11 (a) 20.794DC M ql =(右侧受拉) (b) 6.14GD M q =(右侧受拉)6.1223.68AC M =kN·m (右侧受拉)6.1359.3310BA M =ᅲkN·m (上侧受拉)6.142/M EIt h a =(外侧受拉)6.152/32BA M ql =(下侧受拉)6.1617.5CB M =kN·m (下侧受拉)6.1778.75CD M =kN·m (上侧受拉)6.1827/12AB M ql =(上侧受拉)6.191117.95A M =kN·m (上侧受拉)6.200.34AD m =,13.33AD M =kN·m 6.2142.3BA M =kN·m (上侧受拉)6.2217.35BA M =kN·m (上侧受拉)6.2357.4BA M =kN·m (上侧受拉)6.2428.5BA M =kN·m (上侧受拉)6.2573.8BD M =kN·m (左侧受拉)。
位移法习题答案

位移法习题答案位移法的基本步骤包括:1. 选择位移函数:根据结构的边界条件和对称性,选择合适的位移函数。
2. 建立位移矩阵:将位移函数表示为位移矩阵的形式。
3. 应用位移边界条件:根据结构的固定边界条件,确定位移矩阵中的未知数。
4. 计算内力:利用位移矩阵和结构的几何关系,计算出结构的内力。
5. 验证位移法结果:通过比较位移法的结果与其他方法(如力法)的结果,验证位移法的准确性。
例题:考虑一个简支梁,长度为L,受集中力P作用于中点。
使用位移法求解梁的弯矩和剪力分布。
解答:首先,我们假设梁的位移函数为:\[ w(x) = \frac{Px(L-x)}{2EI} \]其中,\( w(x) \) 是梁在x位置的位移,\( E \) 是材料的弹性模量,\( I \) 是截面惯性矩。
接下来,根据位移函数,我们可以计算梁的弯矩和剪力:\[ M(x) = -EI \frac{d^2w}{dx^2} \]\[ V(x) = -EI \frac{dw}{dx} \]应用位移边界条件,我们可以确定位移函数中的未知数。
对于简支梁,位移在支点处为零,即:\[ w(0) = w(L) = 0 \]将位移函数代入上述条件,我们可以验证假设的位移函数满足边界条件。
最后,代入位移函数到弯矩和剪力的表达式中,我们可以得到:\[ M(x) = -\frac{P}{2} \left( \frac{L^2}{4} - x^2 \right) \]\[ V(x) = -\frac{P}{2} \left( L - 2x \right) \]通过上述计算,我们得到了梁在任意位置的弯矩和剪力分布。
结论:位移法是一种有效的结构分析方法,它通过位移函数来求解结构的内力和位移。
通过本题的解答,我们可以看到位移法在求解简支梁问题中的应用。
请注意,上述内容是一个示例答案,具体的习题答案会根据具体的题目而有所不同。
在实际应用中,需要根据具体的结构和受力情况来选择合适的位移函数和计算方法。
结构力学位移法题及答案34862说课材料
结构力学位移法题及答案34 8 6 2超静定结构计算位移法一、判断题:1、判断下列结构用位移法计算时基本未知量的数目(1)PC EA= oo DEl=EI EIEA--- ------------- o2、位移法求解结构内力时如果 M P 图为零,则自由项R 1P 一定为零3、位移法未知量的数目与结构的超静定次数有关。
4、 位移法的基本结构可以是静定的,也可以是超静定的。
5、 位移法典型方程的物理意义反映了原结构的位移协调条件。
、计算题:i 相同EIEI 2 EI iAFEI =8 GEl iH(4)(5)2EI4EI2EIEA 4EIEI=2EI4EI(3)El=13、用位移法计算图示结构并作 M 图。
E I =常数14、 求对应的荷载集度q 。
图示结构横梁刚度无限大。
已知柱顶的水平 位移为 512/(3EI)。
q 二 ElElEI 8m_——I —―— —12m12m------------------ -P -------------------- ---15、 用位移法计算图示结构并作 M 图。
EI =常数。
1P !1 P12EI2EI EI4 I/2 I/2T1- I1 ------ d ------- 1 -----------In _ l20kN19、20、23、A16kN/mC E4m4m4m用位移法计算图示结构并作2ii用位移法计算图示结构并作6m6m 6mh- +用位移法计算图示结构并作l ql2图。
图。
图。
各杆El =常数,q =20kN/m。
El =常数。
32、用位移法作图示结构 M 图。
E I =常数36、用位移法计算图示对称刚架并作 M 图。
各杆EI =常数38、用位移法计算图示结构并作 M 图。
EI =常数21 I2I29、用位移法计算图示结构并作 M 图。
设各杆的EI 相同-hql/2l/2■■i IVlA r 148、已知B 点的位移,求PAB■;! ------------------------------------XI/2PEI=常数I/2—— -------------1.5 IIlli------ 1 ------------ 1 ----------- 1 -----42、用位移法计算图示结构并作 M 图 43、用位移法计算图示结构并作 M 图。
《结构力学习题》(含答案解析)
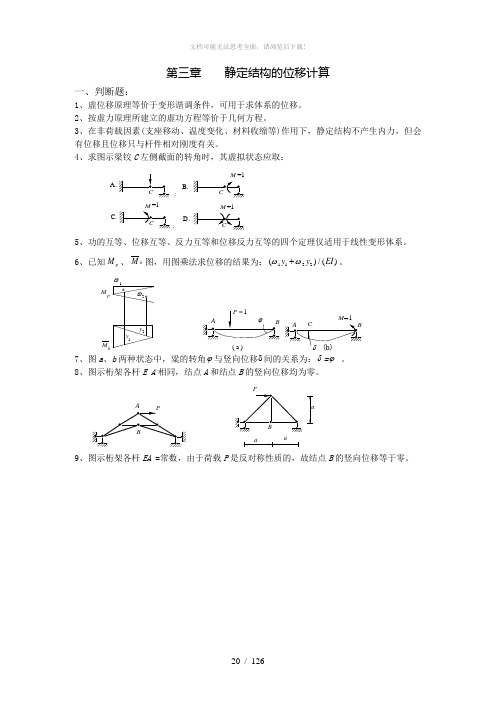
《结构力学习题》(含答案解析)-CAL-FENGHAI.-(YICAI)-Company One120 第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;; B.D.M C.=1=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p 21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
Aa a21 9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
q l l l /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a 10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
l l l l /3 2 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m 3m 3m14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI =常数。
l ll/217、求图示刚架横梁中D点的竖向位移。
EI=常数。
18、求图示刚架中D点的竖向位移。
E I = 常数。
qll l/219、求图示结构A、B两截面的相对转角,EI=常数。
【精选】结构力学-矩阵位移法答案 doc资料
结构力学-矩阵位移法答案第七章 矩阵位移法(参考答案)四、1、[]K i i i i i i i i i =⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥4202224122223333(+) 4(+) 02、[]K i i i i i i i =⎡⎣⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥840012216612 0 对称,i EI l =/ 3、{}P ql ql ql ql =--⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪2222242524248//// 4、{}[]T ql ql pl pl M P 12/)12/8/()8/(22-+-+=5、42.8851.4090(kN m).M6、R ql B=↑067857.() 7、⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡3320392422821θθi i i i⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧39821121i θθ ()()⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧01249826221121M M M M8、[]K 2221636003600=⨯⎡⎣⎢⎤⎦⎥ 6104 9、[]K i l i l i l i i i i EI l =-⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥=366622/// 12 4对称,式中: 10、(0,0)(1,2)(0,3)(0,0)① ② ③{}P =--⋅-⋅⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪ kN 5kN m 16kN m 211、{}[]T P 0 34 7-=12、 {}{}{}{}δδ①②①②=-⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪=-⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪=-⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪=---⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪ , , , 005120512000525252525252525233l EI l EI F F 13、i K l EI i i K l EA k k l i K 4,/,12,/,/361333222====+=14、K EA l EI l K EI l K 223342151260=+==//,/,15、[][][][][][]K K K K K K 222222222421=++=①②③③,16、[][][][][][][][]K K K K K K K K =+++⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥22222112112222①③③③③②④17、[]⎥⎦⎤⎢⎣⎡=336lEI K18、(0,0,0)统一编码如图:① ② ③ (1,0,4)63(0,0,0)1(1,0,2)4(1,0,3)5(0,0,0)219、k k k k k k 221112212222①②②②②③++⎡⎣⎢⎢⎤⎦⎥⎥ 20、21、{}⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=2kN.m 12kN 2kN 3EP 22、{}P ql ql ql 2E 24=--⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪//22223、P ql P ql P ql 1324224===-,/,[]4 0 4 0 0 46- 0 0 12223⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+=l EI l EI l EIl EI l EI l EA K []K =⨯⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥1061203003240300300424、{}P ql ql ql =-⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪ ///222524225、P ql P ql P ql 45622212==-=/,/,/26、P p l P P ql P M P l q l 113341282812=-=--=-+,,27、P ql P ql P ql P 327891112220==-=-=/,/,/,28、{}[]P =---6 22 14 5 12 18T29、{}[]P =---4 10 4 0 6 4T30、{}P P P Pl 2 =--⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪///2323431、(0,0,0)(1,4,3)(0,0,0)(1,2,3)1234 {}P =---⋅⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪38170kN kN kN m32、(1,0,2)(3,4,5)(0,6,0,)(0,0,0) {}P ql ql ql ql ql =--⎧⎨⎪⎪⎪⎪⎩⎪⎪⎪⎪⎫⎬⎪⎪⎪⎪⎭⎪⎪⎪⎪ 01112238222//// 33、{}[]P T 40 -32 -14=34、{}P =--⋅⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪ kN 10kN 10kN m 1035、{}TPl ql ql P P ⎥⎦⎤⎢⎣⎡+--=812,2,2,0,0236、{}[]∆=0 0 0 -0.1569 -0.2338 0.4232 0 0 0T,2336.02=②F37、F F 3603330333=⋅=-⋅.,.kN m kN m38、{}⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧----=kN.m kN kN kN.m kN kN 1321726.193.19561.651726.193.19③F39、40、{}Fql ql ql ql ①分=⎧⎨⎪⎪⎪⎪⎩⎪⎪⎪⎪⎫⎬⎪⎪⎪⎪⎭⎪⎪⎪⎪ 007902340020800575722....() 41、M 28925②=-.kN 42、123①②③ (0,0)(0,0)(0,1)(0,1)(2,3)(2,3)[]K EA l =⨯+-+---⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥24221111221111143、{}P =⎧⎨⎩⎫⎬⎭8kN 6kN 44、{}[]kN P T 40,30,20,10--=45、{}F①=-⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪1116011160..kN46、{}∆=(/())1EA ×[]T 1167.111- 137.680-01139.555- 00322.342 {}[]F①=-85581.kN 85.581kN T47、NP ①=3(压 力 )48、{}⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-=0505 kN kN ①F49、l EAlEI K +=3441245=K2134(1,2,3)(10,11,12)(7,8,9)(4,5,6)(4,5,0)①②③(7,8,0)50、(0,0,0)(0,0,0)(1,2,3)(0,0,0)(1,2,0)③①②1352451、K EA l K EI l EA l K EI l 4455366336412==+=/,//,/ 52、积分变换法求解定解问题为了说明傅氏变换法解非齐次方程特别简便,我们特举一强迫弦振动问题: 求解无限长弦的强迫振动方程的初值问题200(,), ()|() |()tt xx t t t u a u f x t x u x u x ϕψ==⎧-=-∞<<∞⎪=⎨⎪=⎩ 【解】 作傅氏变换[(,)](,), [(,)](,),[()](), [()]()u x t U t f x t F t x x ωωϕωψω===Φ=ψF F F F我们容易得到原定解问题可变换为下列常微分方程的问题222200(,)(,)(,)|(),(,)|(),t t t U a U t F t t U t U t ωωωωωωω==⎧∂+=⎪∂⎪⎨=Φ⎪⎪=ψ⎩上述问题的解为01()(,)(,)sin ()d ()cos()sin()t U t F a t at a t a a ωωωτωττωωωωωψ=-+Φ+⎰利用傅氏变换的性质有1 1[(,)](,)1[(,)](,)d i xx F t f x t F f ωωτξτξω--==⎰F F故得到()1i ()1[(,)](,)d i x a t a t x e F t f τωτωξτξω±--±-=⎰F i ()i ()1sin[()][]2i a t a t a t e e ωτωτωτ----=-代入得到()()01(,)[(,)d (,)d ]d 211 [()()]()d 22t x a t x a t x x x atx at u x t f f a x at x at a ττξτξξτξτϕϕψξξ+---+-=-+++-+⎰⎰⎰⎰即得()0()1(,)(,)d d 211 [()()]()d 22t x a t x a t x atx at u x t f ax at x at a ττξτξτϕϕψξξ+---+-=+++-+⎰⎰⎰例15.2 求解无限长细杆的热传导(无热源)问题200, (,0)|() t xx t u a u x t u x ϕ=⎧-=-∞<<∞>⎨=⎩【解】 作傅氏变换,[(,)](,)u x t U t ω=F [()]()x ϕω=ΦF 定解问题变换为22(,)0(,0)()U a U t U ωωωω'⎧+=⎨=Φ⎩ 常微分方程的初值问题的解是22(,)()a tU t e ωωω-=Φ 再进行逆傅里叶变换,22221i i i 1(,)[(,)]()d 2π1 [()d ]d 2πa t x a t x u x t U t e e e e e ωωωξωωωωωϕξξω∞---∞∞∞---∞-∞==Φ=⎰⎰⎰F交换积分次序得22i ()1(,)()[d ]d 2πa t x u x t e e ωωξϕξωξ∞∞---∞-∞=⎰⎰引用积分公式22224d e e eβσωβωσω∞--∞=⎰且令 i()x σβξ==- 以便利用积分公式,即得到天津大学专用纸学院专业班年级学号共 3 页第 1 页。
位移法习题答案
位移法习题答案位移法是力学中的一种重要方法,用于求解刚体或弹性体的位移和变形。
它通过建立坐标系和运用力平衡条件,将问题转化为求解位移的数学问题。
本文将通过几个典型的位移法习题,来展示位移法的应用和解题思路。
第一个习题是关于简支梁的弯曲变形。
考虑一个长度为L的简支梁,在梁的中点施加一个集中力F。
我们的目标是求解梁的弯曲变形。
首先,我们需要建立坐标系。
假设梁的左端为原点O,梁的水平方向为x轴正方向,竖直向上为y轴正方向。
选择一个合适的参考点A,将其坐标设为(x, y)。
接下来,我们需要运用力平衡条件。
考虑梁上的一个微小段dx,其长度为dl。
由于梁是简支的,我们可以得到以下平衡方程:∑F_x = 0: -N(x+dx) + N(x) + F = 0∑F_y = 0: T(x+dx) - T(x) - dl*w = 0其中,N(x)和T(x)分别表示梁上某一点处的法向力和切向力,w表示单位长度的梁的重力。
将上述方程进行展开,并忽略高阶微小量,我们可以得到:-dN/dx*dx + F = 0dT/dx*dx - dl*w = 0由于dx是一个无穷小量,我们可以将上述方程进行积分,得到:-N(x) + F*x + C_1 = 0T(x) - dl*w*x + C_2 = 0其中,C_1和C_2是积分常数。
接下来,我们需要确定积分常数C_1和C_2。
考虑梁的边界条件,即在梁的两端点处,梁的位移为零。
根据这个条件,我们可以得到:N(0) = 0: C_1 = 0N(L) = 0: -F*L + C_1 = 0解上述方程组,我们可以得到C_1 = 0和C_2 = dl*w*L。
最后,我们可以得到梁上任意一点的位移表达式:y(x) = ∫(0 to x) [T(x')/dl*w*x' - dl*w*x'] dx'将T(x)和C_2的表达式代入,我们可以得到:y(x) = ∫(0 to x) [(dl*w*x' - dl*w*L)/dl*w*x' - dl*w*x'] dx'= ∫(0 to x) (1 - L/x') dx'对上述积分进行计算,我们可以得到:y(x) = x - L * ln(x)通过上述推导,我们成功地求解了简支梁的弯曲变形问题。
结构力学课后习题解答:6位移法习题解答
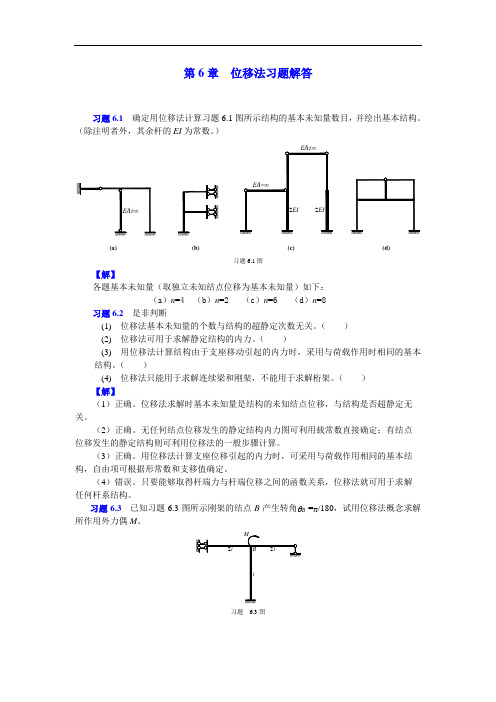
第6章位移法习题解答习题6.1确定用位移法计算习题6.1图所示结构的基本未知量数目,并绘出基本结构。
(除注明者外,其余杆的EI为常数。
)(a) (b) (c) (d)习题6.1图【解】各题基本未知量(取独立未知结点位移为基本未知量)如下:(a)n=4 (b)n=2 (c)n=6 (d)n=8习题6.2是非判断(1)位移法基本未知量的个数与结构的超静定次数无关。
()(2)位移法可用于求解静定结构的内力。
()(3)用位移法计算结构由于支座移动引起的内力时,采用与荷载作用时相同的基本结构。
()(4)位移法只能用于求解连续梁和刚架,不能用于求解桁架。
()【解】(1)正确。
位移法求解时基本未知量是结构的未知结点位移,与结构是否超静定无关。
(2)正确。
无任何结点位移发生的静定结构内力图可利用载常数直接确定;有结点位移发生的静定结构则可利用位移法的一般步骤计算。
(3)正确。
用位移法计算支座位移引起的内力时,可采用与荷载作用相同的基本结构,自由项可根据形常数和支移值确定。
(4)错误。
只要能够取得杆端力与杆端位移之间的函数关系,位移法就可用于求解任何杆系结构。
习题6.3已知习题6.3图所示刚架的结点B产生转角θB =π/180,试用位移法概念求解所作用外力偶M。
习题 6.3图【解】30i π 。
发生转角θB 时,可直接求得结点B 所连的各杆端弯矩,再由结点B 的平衡条件即可得M 。
习题6.4 若习题6.4图所示结构结点B 向右产生单位位移,试用位移法中剪力分配法的概念求解应施加的力F P 。
习题 6.4图【解】315lEI。
结点B 向右产生单位位移时,横梁所连各柱端剪力之和即为F P 。
习题6.5 已知刚架的弯矩图如习题6.5图所示,各杆EI =常数,杆长l =4m ,试用位移法概念直接计算结点B 的转角θB 。
m习题 6.5图【解】由M 图可知,BC 杆上无外荷载,其杆端弯矩为330BC BC B M i θ==-,由此求得40B EIθ=-。
《结构力学习题》(含答案解析)
第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;; B.D.C.=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M k M p 21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
a a9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
q l l l /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a 10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
l l l /3 2 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m 3m 3m14、求图示刚架B 端的竖向位移。
ql15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI =常数。
l/217、求图示刚架横梁中D点的竖向位移。
EI=常数。
18、求图示刚架中D点的竖向位移。
E I = 常数。
qll l/219、求图示结构A、B两截面的相对转角,EI=常数。
l/23l/320、求图示结构A、B两点的相对水平位移,E I = 常数。
ll21、求图示结构B点的竖向位移,EI = 常数。
李廉锟《结构力学》(上册)配套题库【课后习题】(位移法)【圣才出品】

第8章位移法复习思考题1.位移法的基本思路是什么?为什么说位移法是建立在力法的基础之上的?答:(1)位移法的基本思路位移法的基本思路是首先确定原结构的基本未知量,加入附加联系从而得基本结构,令各附加联系发生与结构相同的结点位移;再根据在荷载等外因和各结点位移共同作用下,各附加联系上的反力偶或反力均等于零的条件,建立方程,求出未知位移;最后求出结构反力和内力。
(2)位移法是建立在力法的基础之上的原因因为位移法的基本结构是两端固定的或一端固定一端铰支的单跨超静定梁。
位移法进行计算是以这些基本结构为基础的,需要用力法算出单跨超静定梁在杆端发生各种位移时以及荷载等因素作用下的内力,才能继续进行位移法以后的求解。
2.位移法的基本未知量与超静定次数有关吗?答:位移法的基本未知量与超静定次数无关。
因为位移法的基本未知量是指独立的结点的角位移和独立的结点的线位移,而这两个量与超静定次数并无关系。
3.位移法的典型方程是平衡条件,那么在位移法中是否只用平衡条件就可以确定基本未知量,从而确定超静定结构的内力?在位移法中满足了结构的位移条件(包括支承条件和变形连续条件)没有?在力法中又是怎样满足结构的位移条件和平衡条件的?答:(1)在位移法中只用平衡条件就可以确定基本未知量,从而确定超静定结构的内力。
(2)在位移法中已满足结构的位移条件(包括支承条件和变形连续条件)。
因为在位移法的假设和取基本未知量时,结构的支承条件和变形连续条件就已经考虑进去了,所以位移法中结构的位移条件自动满足,故只需要平衡条件就可以确定基本未知量了。
(3)力法的典型方程实质上就是满足结构的位移条件(包括支承条件和变形连续条件)。
力法是在满足平衡条件下进行分析的,只要结构不破坏,平衡条件会自动满足。
4.在什么条件下独立的结点线位移数目等于使相应铰结体系成为几何不变所需添加的最少链杆数?答:不考虑受弯直杆的轴向变形(即受弯直杆两端距离不变)的条件下,独立的结点线位移数目等于使相应铰结体系成为几何不变所需添加的最少链杆数。
结构力学课后习题答案
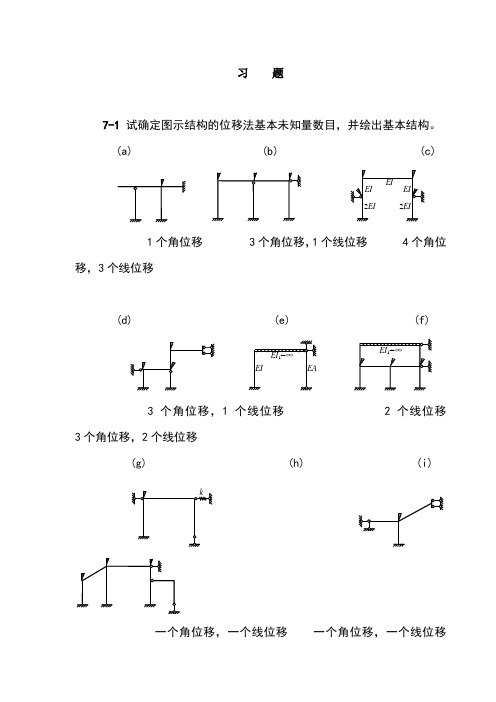
习题7-1 试确定图示结构的位移法基本未知量数目,并绘出基本结构。
(a) (b) (c)1个角位移 3个角位移,1个线位移 4个角位移,3个线位移(d) (e) (f)3个角位移,1个线位移 2个线位移3个角位移,2个线位移(g) (h) (i)一个角位移,一个线位移一个角位移,一个线位移三个角位移,一个线位移7-2 试回答:位移法基本未知量选取的原则是什么为何将这些基本未知位移称为关键位移是否可以将静定部分的结点位移也选作位移法未知量7-3 试说出位移法方程的物理意义,并说明位移法中是如何运用变形协调条件的。
7-4 试回答:若考虑刚架杆件的轴向变形,位移法基本未知量的数目有无变化如何变化7-5 试用位移法计算图示结构,并绘出其内力图。
(a)lBl l解:(1)确定基本未知量和基本结构有一个角位移未知量,基本结构见图。
Z 1M 图(2)位移法典型方程 11110pr Z R +=(3)确定系数并解方程iql Z ql iZ ql R i r p 24031831,821212111==-∴-==(4)画M 图M 图(b)4m 4m4mC解:(1)确定基本未知量1个角位移未知量,各弯矩图如下1Z =1M 图32EIp M 图(2)位移法典型方程 11110pr Z R +=(3)确定系数并解方程 1115,352p r EI R ==- 153502EIZ -=114Z EI=(4)画M 图()KN mM ⋅图(c)6m6m9m解:(1)确定基本未知量 一个线位移未知量,各种M 图如下1M 图243EI 243EI 1243EI p M 图F R(2)位移法典型方程 11110pr Z R +=(3)确定系数并解方程 1114,243p pr EI R F ==- 140243p EIZ F -=12434Z EI=(4)画M 图94M 图(d)解:(1)确定基本未知量 一个线位移未知量,各种M 图如下11Z1111r 252/25EA a 简化a2aa2aaF F P图1pR pp M(2)位移法典型方程 11110pr Z R +=(3)确定系数并解方程 11126/,55p pr EA a R F ==-126055p EA Z F a -=13a Z EA=(4)画M 图图M(e)l解:(1)确定基本未知量 两个线位移未知量,各种M 图如下图1=11211 EA r l r ⎛⇒=⎝⎭1M221EA r l ⎛=⎝⎭图12 0p p p R F R ⇒=-=p M pF(2)位移法典型方程1111221211222200p p r Z r Z R r Z r Z R ++=++=(3)确定系数并解方程11122122121,4414,0p p p EA r r r l l EA r l R F R ⎛⎫=+== ⎪⎝⎭⎛=+ ⎝⎭=-=代入,解得12p p lZ F EAlZ F EA=⋅=⋅(4)画M 图图M p7-6 试用位移法计算图示结构,并绘出M 图。
西北工业大学(王生楠)结构力学课后题答案第五章位移法

2 − 2 0 −4 0 0 0 0 − 2 4+ 2 0
4 0 0 8+ 2 0 − 2 0 −4 0 0 0 0
0 − 2 −4 4+ 2 0 0 8+ 2 0 − 2 0 −4
⎤ ⎥ ⎥ − 2 ⎥ ⎥ 2 ⎥ 0 ⎥ ⎥ 0 ⎥ ⎥ 0 ⎥ 0 ⎥ ⎥ −4 ⎥ 0 ⎥ ⎥ 4 + 2⎦ ⎥ 0 0
K 1− 4
⎡ 1 3 −1 − 3⎤ ⎢ ⎥ 3 3 − 3 −3 ⎥ 3 EA ⎢ = 8l ⎢ − 1 − 3 1 3 ⎥ ⎢ ⎥ 3 3 ⎥ ⎢− 3 − 3 ⎣ ⎦
�
杆元 1-5,长度为 2l , θ = 30 , λ = cos θ =
3
2
, µ = sin θ = 1 . 2
K 1−5
2
4
6
60°
7
1 a
3 a
5 a
(b)
解:以节点 1 为原点,建立如图所示的总体坐标系。 建立元素刚度矩阵。杆元 1-3, l = a, θ = 0 , λ = cos θ = 1, µ = sin θ = 0.
�
K 1−3
⎡1 ⎢0 EA ⎢ = a ⎢− 1 ⎢ ⎣0
0 −1 0 0 0 1 0 0
0 0⎤ 0 − 1⎥ ⎥ 0 0⎥ ⎥ 0 1⎦
杆元 1-5,长度为 2l
θ = 60 � , λ = cos θ = 1 , µ = sin θ = 3 , 2 2 3,
K 1−5
⎡ 1 3 −1 − 3⎤ ⎢ ⎥ 3 3 − 3 −3 ⎥ 3 EA ⎢ = 8l ⎢ − 1 − 3 1 3 ⎥ ⎢ ⎥ 3 3 ⎥ ⎢− 3 − 3 ⎣ ⎦
K 1− 2
结构力学习题含答案解析

第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;; B.D.C.M =15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M k M p7、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
q l l l /211、求图示静定梁D 端的竖向位移∆DV 。
EI = 常数,a = 2m 。
a a a 10kN/m12、求图示结构E 点的竖向位移。
EI = 常数。
l l l /3/3q13、图示结构,EI=常数,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m 3m 3m14、求图示刚架B 端的竖向位移。
ql15、求图示刚架结点C 的转角和水平位移,EI = 常数。
16、求图示刚架中D点的竖向位移。
EI=常数。
l/217、求图示刚架横梁中D点的竖向位移。
EI =常数。
18、求图示刚架中D 点的竖向位移。
E I = 常数 。
ql l/219、求图示结构A、B两截面的相对转角,EI =常数。
l/23l/320、求图示结构A 、B 两点的相对水平位移,E I = 常数。
l l21、求图示结构B 点的竖向位移,EI =常数。
l l22、图示结构充满水后,求A 、B 两点的相对水平位移。
位移法习题与答案

位移法习题与答案位移法是结构力学中常用的一种分析方法,通过计算结构在外力作用下的位移,来求解结构的应力、应变和变形等问题。
在学习位移法时,习题与答案的练习是非常重要的,可以帮助我们加深对位移法的理解和掌握。
下面将给大家介绍一些位移法习题及其答案。
习题一:求解简支梁的弯矩分布已知一根长度为L的简支梁,受到均布载荷q作用,求解弯矩分布。
解答:首先,我们需要根据受力分析确定梁的反力。
对于简支梁,两个支座处的反力相等,且为qL/2。
接下来,我们可以利用位移法求解弯矩分布。
假设梁的弯矩分布为M(x),则根据位移法的基本原理,可以得到以下方程:d2M(x)/dx2 = -q对该方程进行两次积分,得到:M(x) = -q*x^2/2 + C1*x + C2由于梁两端是简支条件,即位移和转角为零,可以得到边界条件:M(0) = 0M(L) = 0代入上述方程,解得C1 = qL/2,C2 = -qL^2/2。
因此,弯矩分布为:M(x) = -q*x^2/2 + qL/2*x - qL^2/2习题二:求解悬臂梁的挠度已知一根长度为L的悬臂梁,受到集中力F作用在悬臂端点,求解梁的挠度。
解答:首先,我们需要根据受力分析确定梁的反力。
对于悬臂梁,端点处的反力只有一个,即为F。
接下来,我们可以利用位移法求解梁的挠度。
假设梁的挠度为δ(x),则根据位移法的基本原理,可以得到以下方程:d2δ(x)/dx2 = -F/(EI)对该方程进行两次积分,得到:δ(x) = -F*x^2/(2EI) + C1*x + C2由于梁端点处的位移为零,可以得到边界条件:δ(0) = 0dδ(x)/dx|_(x=L) = 0代入上述方程,解得C1 = 0,C2 = 0。
因此,梁的挠度为:δ(x) = -F*x^2/(2EI)习题三:求解悬臂梁的最大挠度已知一根长度为L的悬臂梁,受到均布载荷q作用,求解梁的最大挠度。
解答:首先,我们需要根据受力分析确定梁的反力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
结构力学位移法题及
答案
超静定结构计算——位移法
一、判断题:
1、判断下列结构用位移法计算时基本未知量的数目。
(1)(2)(3)
(4)(5)(6)
EI EI
EI EI
2EI EI
EI EI
EA
EA
a
b
EI=
EI=
EI=
2
444
2
2、位移法求解结构内力时如果P
M图为零,则自由项1P
R一定为零。
3、位移法未知量的数目与结构的超静定次数有关。
4、位移法的基本结构可以是静定的,也可以是超静定的。
5、位移法典型方程的物理意义反映了原结构的位移协调条件。
二、计算题:
仅供学习与交流,如有侵权请联系网站删除谢谢40
仅供学习与交流,如有侵权请联系网站删除 谢谢41
12、用位移法计算图示结构并作M 图,横梁刚度EA →∞,两柱线刚度
i 相同。
2
13、用位移法计算图示结构并作M 图。
E I =常数。
l
l /2l /2
14、求对应的荷载集度q 。
图示结构横梁刚度无限大。
已知柱顶的水平位移为 ()5123/()EI →。
12m
12m
8m
q
15、用位移法计算图示结构并作M 图。
EI =常数。
仅供学习与交流,如有侵权请联系网站删除 谢谢42
l
l l l
16、用位移法计算图示结构,求出未知量,各杆EI 相同。
4m
19、用位移法计算图示结构并作M 图。
q
l
l
20、用位移法计算图示结构并作M 图。
各杆EI =常数,q = 20kN/m 。
6m
6m
23、用位移法计算图示结构并作M 图。
EI =常数。
仅供学习与交流,如有侵权请联系网站删除 谢谢43
l
l 2
24、用位移法计算图示结构并作M 图。
EI =常数。
l
q
l
29、用位移法计算图示结构并作M 图。
设各杆的EI 相同。
q
q
l l /2/2
32、用位移法作图示结构M 图。
E I =常数。
q
l l
/2
l /2l
仅供学习与交流,如有侵权请联系网站删除 谢谢44
36、用位移法计算图示对称刚架并作M 图。
各杆EI =常数。
l l
38、用位移法计算图示结构并作M 图。
EI =常数。
q
l l l l
42、用位移法计算图示结构并作M 图。
2m 2m
43、用位移法计算图示结构并作M 图。
EI =常数。
l l
l 48、已知B点的位移∆,求P。
l l /2 /2
∆
51、用位移法计算图示结构并作M图。
q
超静定结构计算——位移法(参考答案)
1、(1)、4;(2)、4;(3)、9;(4)、5;
(5)、7;
(6)、7。
2、(X)
3、(X)
4、(O)
5、(X)12、 13、
仅供学习与交流,如有侵权请联系网站删除谢谢45
仅供学习与交流,如有侵权请联系网站删除 谢谢46
617
3.5(×qh 2
40/) 69/104
21/104
14/104
/4pl 15104
()⨯Pl
14、kN/m 3=q
15、
Z
1ql 2
2=(18 )
i 91ql
29ql 29ql 21
1182
ql
2ql 2M 图
l
l
l
16、θB EI =3207, ∆B EI
=3328
21(→) 19、
()2
ql ⨯
20、
A
B
C
D
E
90
1806060M 图 kN m .( )
23、
仅供学习与交流,如有侵权请联系网站删除 谢谢47
ql 214
118
14
128
4
3图 M ()
×
24、
ql
2图 ( )×M
29、
1/82
1/82
ql
ql
..
32
仅供学习与交流,如有侵权请联系网站删除 谢谢48
ql 2
8
/ql 2
8
/
36
图 M (
/7 )ql 2
38、
7
1010
10
(⨯2332
ql /)
42
仅供学习与交流,如有侵权请联系网站删除 谢谢49
43、
(⨯ql 2)
48、P EI l =
912253∆ 51、
图 M 1056
ql 2856ql 2。