多目标线性规划的若干解法及MATLAB实现
Matlab求解线性规划和整数规划问题

Matlab求解线性规划和整数规划问题Matlab是一种强大的数值计算和科学计算软件,可以用于求解各种数学问题,包括线性规划和整数规划问题。
本文将详细介绍如何使用Matlab来求解线性规划和整数规划问题。
一、线性规划问题的求解线性规划是一种优化问题,旨在找到一组变量的最佳值,以使线性目标函数在一组线性约束条件下最大或者最小化。
下面以一个简单的线性规划问题为例来说明如何使用Matlab求解。
假设有以下线性规划问题:最大化目标函数:Z = 3x + 5y约束条件:2x + y ≤ 10x + 3y ≤ 15x, y ≥ 01. 创建线性规划模型在Matlab中,可以使用linprog函数来创建线性规划模型。
首先,定义目标函数的系数向量c和不等式约束条件的系数矩阵A以及不等式约束条件的右侧常数向量b。
c = [-3; -5];A = [2, 1; 1, 3];b = [10; 15];2. 求解线性规划问题然后,使用linprog函数求解线性规划问题。
该函数的输入参数为目标函数的系数向量c、不等式约束条件的系数矩阵A、不等式约束条件的右侧常数向量b以及变量的下界和上界。
lb = [0; 0];ub = [];[x, fval, exitflag] = linprog(c, A, b, [], [], lb, ub);其中,x是最优解向量,fval是最优解对应的目标函数值,exitflag是求解器的退出标志。
3. 结果分析最后,打印出最优解向量x和最优解对应的目标函数值fval。
disp('最优解向量x:');disp(x);disp('最优解对应的目标函数值fval:');disp(fval);二、整数规划问题的求解整数规划是一种优化问题,与线性规划类似,但是变量的取值限制为整数。
Matlab提供了intlinprog函数来求解整数规划问题。
下面以一个简单的整数规划问题为例来说明如何使用Matlab求解。
Matlab求解线性规划和整数规划问题
Matlab求解线性规划和整数规划问题线性规划是一种数学优化问题,通过线性函数的最大化或者最小化来实现目标函数的优化。
整数规划是线性规划的一种特殊情况,其中变量被限制为整数值。
在Matlab中,我们可以使用优化工具箱中的函数来求解线性规划和整数规划问题。
下面将详细介绍如何使用Matlab来求解这些问题。
1. 线性规划问题的求解首先,我们需要定义线性规划问题的目标函数、约束条件和变量范围。
然后,我们可以使用linprog函数来求解线性规划问题。
例如,考虑以下线性规划问题:目标函数:最大化 2x1 + 3x2约束条件:x1 + x2 <= 10x1 - x2 >= 2x1, x2 >= 0在Matlab中,可以按照以下步骤求解该线性规划问题:1. 定义目标函数的系数向量c和约束矩阵A,以及约束条件的右侧向量b。
c = [2; 3];A = [1, 1; -1, 1];b = [10; -2];2. 定义变量的上下界向量lb和ub。
lb = [0; 0];ub = [];3. 使用linprog函数求解线性规划问题。
[x, fval] = linprog(-c, A, b, [], [], lb, ub);运行以上代码后,可以得到最优解x和目标函数的最优值fval。
2. 整数规划问题的求解对于整数规划问题,我们可以使用intlinprog函数来求解。
与线性规划问题类似,我们需要定义整数规划问题的目标函数、约束条件和变量范围。
然后,使用intlinprog函数求解整数规划问题。
例如,考虑以下整数规划问题:目标函数:最小化 3x1 + 4x2约束条件:2x1 + 5x2 >= 10x1, x2为非负整数在Matlab中,可以按照以下步骤求解该整数规划问题:1. 定义目标函数的系数向量f和约束矩阵A,以及约束条件的右侧向量b。
f = [3; 4];A = [-2, -5];b = [-10];2. 定义变量的整数约束向量intcon。
matlab多目标规划模型
李小飞
多目标决策的基本概念 多目标决策的数学模型及其非劣解 多目标决策建模的应用实例
用LINGO软件求解目标规划问题
1. 求解方法概述
• LINGO(或LINDO)不能直接求解目标规 划问题,但可以通过逐级求解线性规划的 方法,求得目标规划问题的满意解。
2. 示例
• 例1 用LINGO求解目标规划问题
需要预先确定各个目标的期望值 fi* ,同时给每一个目标 赋予一个优先因子和权系数,假定有K个目标,L个优先级
多目标决策问题有两个共同的特点,即各目 标的不可公度性和相互之间的矛盾性。所谓目标 的不可公度性指各目标之间没有统一的量纲,因 此难以作相互比较。
目标之间的矛盾性是指,如果改进某 一目标的值,可能会使另一个或一些目标 变差。正因为各目标的不可公度性和相互 之间的矛盾性,多目标决策问题不能简单 的作为单目标问题来处理。必须深入研究 其特征,特别是解的性质。单目标决策一 般有最优解,且往往是唯一的,有时可能 存在无限多个解。但是这里的“最优”往 往带有片面性,不能全而准确的反映决策 者的偏好信息。多目标决策问题不存在所 谓的“最优”解,只存在满意解。满意解 指决策者对于有关的所有目标值都认为满 意。
Z=F(X) 是k维函数向量, (X)是m维函数向量; G是m维常数向量;
多目标规划问题的求解不能只追求一个目标的最优化(最大或 最小),而不顾其它目标。 对于上述多目标规划问题,求解就意味着需要做出如下的复合 选择:
每一个目标函数取什么值,原问题可以得到最满意的解决? 每一个决策变量取什么值,原问题可以得到最满意的解决 ?
max(min) fk ( X )
1( X )
g1
s.t.
(
Matlab求解线性规划和整数规划问题
Matlab求解线性规划和整数规划问题线性规划和整数规划是数学规划中常见的两种优化问题。
Matlab作为一种强大的数值计算软件,提供了丰富的工具和函数来解决这些问题。
本文将介绍如何使用Matlab求解线性规划和整数规划问题,并提供详细的步骤和示例代码。
一、线性规划问题的求解线性规划问题可以表示为如下形式的数学模型:```minimize c'*xsubject to A*x <= blb <= x <= ub```其中,c是目标函数的系数向量,x是决策变量向量,A是不等式约束矩阵,b 是不等式约束向量,lb和ub分别是决策变量的下界和上界。
Matlab中求解线性规划问题可以使用`linprog`函数。
下面是一个示例:```matlabc = [1; 2; 3]; % 目标函数的系数向量A = [1, -1, 2; 3, 1, 0]; % 不等式约束矩阵b = [4; 5]; % 不等式约束向量lb = zeros(3, 1); % 决策变量的下界ub = [Inf; Inf; 10]; % 决策变量的上界[x, fval] = linprog(c, A, b, [], [], lb, ub);```在上面的示例中,我们定义了目标函数的系数向量c,不等式约束矩阵A,不等式约束向量b,以及决策变量的下界lb和上界ub。
然后使用`linprog`函数求解线性规划问题,得到最优解x和最优目标函数值fval。
二、整数规划问题的求解整数规划问题是线性规划问题的一个扩展,要求决策变量取整数值。
Matlab中求解整数规划问题可以使用`intlinprog`函数。
下面是一个示例:```matlabc = [1; 2; 3]; % 目标函数的系数向量A = [1, -1, 2; 3, 1, 0]; % 不等式约束矩阵b = [4; 5]; % 不等式约束向量lb = zeros(3, 1); % 决策变量的下界ub = [Inf; Inf; 10]; % 决策变量的上界intcon = [1; 2]; % 决策变量的整数约束[x, fval] = intlinprog(c, intcon, A, b, [], [], lb, ub);```在上面的示例中,我们除了定义了线性规划问题的参数外,还定义了决策变量的整数约束intcon。
多目标规划matlab程序实现——【2019数学建模+思路】

优化与决策——多目标线性规划的若干解法及MATLAB 实现摘要:求解多目标线性规划的基本思想大都是将多目标问题转化为单目标规划,本文介绍了理想点法、线性加权和法、最大最小法、目标规划法,然后给出多目标线性规划的模糊数学解法,最后举例进行说明,并用Matlab 软件加以实现。
关键词:多目标线性规划 Matlab 模糊数学。
注:本文仅供参考,如有疑问,还望指正。
一.引言多目标线性规划是多目标最优化理论的重要组成部分,由于多个目标之间的矛盾性和不可公度性,要求使所有目标均达到最优解是不可能的,因此多目标规划问题往往只是求其有效解(非劣解)。
目前求解多目标线性规划问题有效解的方法,有理想点法、线性加权和法、最大最小法、目标规划法。
本文也给出多目标线性规划的模糊数学解法。
二.多目标线性规划模型多目标线性规划有着两个和两个以上的目标函数,且目标函数和约束条件全是线性函数,其数学模型表示为:11111221221122221122max n n n nr r r rn nz c x c x c x z c x c x c x z c x c x c x =+++⎧⎪=+++⎪⎨ ⎪⎪=+++⎩ (1)约束条件为:1111221121122222112212,,,0n n n n m m mn n mn a x a x a x b a x a x a x b a x a x a x bx x x +++≤⎧⎪+++≤⎪⎪ ⎨⎪+++≤⎪≥⎪⎩ (2) 若(1)式中只有一个1122i i i in n z c x c x c x =+++ ,则该问题为典型的单目标线性规划。
我们记:()ij m n A a ⨯=,()ij r n C c ⨯=,12(,,,)T m b b b b = ,12(,,,)T n x x x x = ,12(,,,)T r Z Z Z Z = .则上述多目标线性规划可用矩阵形式表示为:max Z Cx =约束条件:0Ax bx ≤⎧⎨≥⎩(3)三.MATLAB 优化工具箱常用函数[3]在MA TLAB 软件中,有几个专门求解最优化问题的函数,如求线性规划问题的linprog 、求有约束非线性函数的fmincon 、求最大最小化问题的fminimax 、求多目标达到问题的fgoalattain 等,它们的调用形式分别为:①.[x,fval]=linprog(f,A,b,Aeq,beq,lb,ub)f 为目标函数系数,A,b 为不等式约束的系数, Aeq,beq 为等式约束系数, lb,ub 为x 的下限和上限, fval 求解的x 所对应的值。
matlab线性规划
matlab线性规划线性规划(Linear Programming)是运筹学中的一种优化问题,指的是在一定的约束条件下,寻找一个线性函数的最优值。
该方法被广泛运用于经济学、管理学、工程学等各个领域。
在MATLAB中,我们可以使用线性规划工具箱来进行线性规划问题的求解。
在MATLAB中,线性规划问题可以通过函数linprog来求解。
linprog函数的一般形式如下:x = linprog(f, A, b, Aeq, beq, lb, ub)其中f是目标函数的系数矩阵,A和b是约束条件Ax ≤ b的系数矩阵和右侧向量,Aeq和beq是等式约束条件Aeqx = beq的系数矩阵和右侧向量,lb和ub是变量的下界和上界向量。
解x是一个n维向量,即最优解。
下面举一个简单的例子来说明如何使用MATLAB求解线性规划问题:假设我们有如下线性规划问题:最大化目标函数 f = [3, 4] * x约束条件为:A = [1, 1; 2, 1; -1, 2]b = [5; 8; 2]lb = [0; 0]ub = []我们可以使用linprog函数来求解:f = [-3, -4]; % 目标函数系数矩阵A = [1, 1; 2, 1; -1, 2]; % 不等式约束条件系数矩阵b = [5; 8; 2]; % 不等式约束条件右侧向量lb = [0; 0]; % 变量的下界向量ub = []; % 变量的上界向量x = linprog(f, A, b, [], [], lb, ub)最终得到的解x为[2; 3],即最优解为x1 = 2,x2 = 3,最优值为f(x) = 17。
通过MATLAB的线性规划工具箱,我们可以方便地求解各种线性规划问题。
无论是简单的二维问题还是更加复杂的高维问题,都可以通过MATLAB轻松求解。
matlab求解线性规划

matlab求解线性规划MATLAB是一个强大的工具,可以用于求解线性规划问题。
线性规划是一种最优化问题,目标是在满足一系列线性约束条件下,找到一个使目标函数取得最大或最小值的解。
在MATLAB中,可以使用线性规划工具箱来求解线性规划问题。
线性规划工具箱提供了一些函数,如linprog,intlinprog和quadprog,这些函数可以用于求解线性规划问题。
解线性规划问题的一般步骤如下:1. 定义目标函数。
目标函数是要优化的函数,可以是线性函数。
例如,如果我们要最小化一个函数f(x)=c1x1+c2x2+...+cnxn,则可以将目标函数表示为向量c=[c1,c2,...,cn]的内积与向量x=[x1,x2,...,xn]。
2. 定义约束条件。
约束条件是对决策变量的限制条件。
一般情况下,约束条件可以表示为Ax<=b,其中A是一个矩阵,x是决策变量向量,b是一个向量。
例如,如果我们有两个约束条件2x1+x2<=10和x1+3x2<=12,则可以将约束条件表示为矩阵A=[2,1;1,3]和向量b=[10;12]。
3. 调用线性规划函数。
在MATLAB中,可以使用linprog函数来求解线性规划问题。
linprog函数有几个输入参数,包括目标函数系数向量c,约束条件矩阵A和向量b,以及可选参数lb和ub。
参数lb和ub是可选参数,用于指定决策变量的下界和上界。
例如,要求解上述线性规划问题,可以调用linprog函数如下:x = linprog(c, A, b)函数linprog返回一个向量x,其中包含目标函数取得最小值时的决策变量的取值。
4. 分析结果。
一旦线性规划问题被求解,我们可以通过检查目标函数的值和决策变量的取值来分析结果。
例如,目标函数的值就是目标函数取得最小值时的值,其中决策变量的取值可以用x变量表示。
总结而言,MATLAB是一个功能强大的工具,可以用于求解线性规划问题。
线性规划问题Matlab求解
线性规划问题M a t l a b求解(总6页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除用MATLAB优化工具箱解线性规划命令:x=linprog(c,A,b)命令:x=linprog(c,A,b,Aeq,beq)注意:若没有不等式:存在,则令A=[ ],b=[ ]. 若没有等式约束, 则令Aeq=[ ], beq=[ ].命令:[1] x=linprog(c,A,b,Aeq,beq, VLB,VUB)[2] x=linprog(c,A,b,Aeq,beq, VLB,VUB, X0)注意:[1] 若没有等式约束, 则令Aeq=[ ], beq=[ ]. [2]其中X0表示初始点4、命令:[x,fval]=linprog(…)返回最优解x及x处的目标函数值fval.例1解编写M文件小如下:c=[ ];A=[ ; 0 0 0 0;0 0 0 0;0 0 0 0 ];b=[850;700;100;900];Aeq=[]; beq=[];vlb=[0;0;0;0;0;0]; vub=[];[x,fval]=linprog(c,A,b,Aeq,beq,vlb,vub)例2 解: 编写M文件如下:c=[6 3 4];A=[0 1 0];b=[50];Aeq=[1 1 1];beq=[120];vlb=[30,0,20];vub=[];[x,fval]=linprog(c,A,b,Aeq,beq,vlb,vub例3 (任务分配问题)某车间有甲、乙两台机床,可用于加工三种工件。
假定这两台车床的可用台时数分别为800和900,三种工件的数量分别为400、600和500,且已知用三种不同车床加工单位数量不同工件所需的台时数和加工费用如下表。
问怎样分配车床的加工任务,才能既满足加工工件的要求,又使加工费用最低解设在甲车床上加工工件1、2、3的数量分别为x1、x2、x3,在乙车床上加工工件1、2、3的数量分别为x4、x5、x6。
多目标线性规划MATLAB软件求解
( )=^∑[ z ], z / Z 一
然 后 极 小 化 [ )], 求 解 z( 即
r —_ — —— —— — —— — —— —— — —— —— —— 一
m …
i ̄ ) √ ) Z] n[ ] E _i2 qZ Z i *,
并 将 它 的最 优 解
1 多 目标 线性 规划模 型
多 目标 线 性 规 划 有 着 两 个 和 两 个 以 上 的 目标 函 数 , 目标 函 数 和 约 束 条 件 全 是 线 且
性 函数 , 数 学模 型表 示 为 : 其
Z1 = C l l + 1 C1 2X 2 + … + C1 n
m
aX
21 0 0年 1 O月 第2 7卷 第 5期
枣 庄 学 院 学 报
J OUR AL 0F Z 0Z AN I R 兀Y N A HU G UN VE S
Oc . Ol t2 O
V0 . 7 N0. 12 5
多 目标 线 性 规 划 MA L B软 件 求 解 TA
2 = C1 I+ c2 2 X 2 2+ …
+ Cn n 2  ̄
( 1)
Zr =
C, l + 1
CrX 2 + 2
…
+
C m n
约 束 条 件 为 :
( 2)
若 (1 )式 中 只 有 一 个 = C +c :+ … +c , 该 问 题 为 典 型 的 单 目 标 线 性 规 划 . i l 则
值 为 z,, Z = ( *, 称 ZI
想 点 法 , 造 评 价 函数 构
r— =—— —— ——— ——— ——— —— —一
, Zr)为 值 域 中 的 一 个 理 想 点 , 为 一 般 很 难 达 到 .于 是 , 期 … * 因 在
线性规划的Matlab求解
2
40 35
x 1 0 x 2 0
minW 54 y1 40 y2 35y3
s.t.
3y1 2 y2 y3 40 2 y1 2 y2 2 y3 30
y1 0 y2 0 y3 0
Lingo/Lindo
• Lingo:Linear Interactive and General Optimizer • Lindo:Linear Interactive and Discrete Optimizer
• 由美国芝加哥大学的Linus Scharge教授于1980年前后开发,专门用于求解最优化问题,后经不断完善和扩 充,并成立LINDO公司进行商业化运作,取得巨大的成功。
• 特色在于可以允许决策变量是整数,执行速度很快;Lingo实际上还是一种建模语言,即使对优化方面的专 业知识了解不多的用户,也能方便的进行输入、求解,并能快速的得到复杂优化问题的高质量的解。
线性规划求解
Matlab的优化工具箱:Optimization Toolbox
线性规划的一般形式
max Z = c1x1 + c2x2 + …. + cnxn (或min) s.t. a11x1 + a12x2 + …. + a1nxn b1 (=或 )
a21x1 + a22x2 + …. + a2nxn b2 (=或 )
a
mn
b1
b
=
b2
bm
线性规划的Matlab标准形式
min Z = c1x1 + c2x2 + …. + cnxn s.t. a11x1 + a12x2 + …. + a1nxn b1
matlab常用算法大全(数学建模)
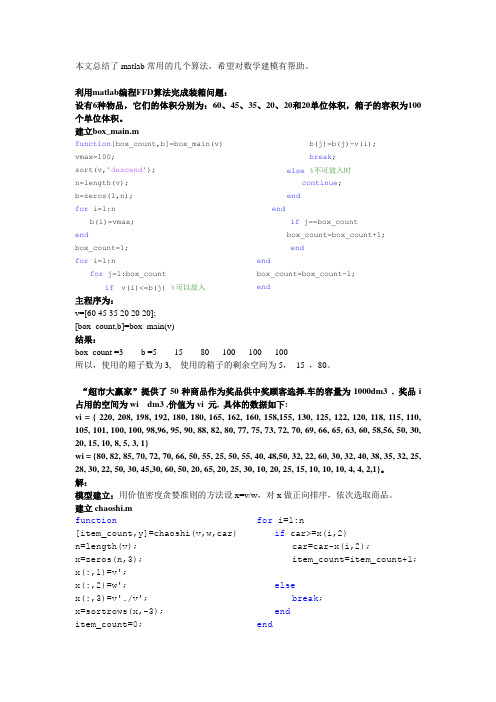
本文总结了matlab常用的几个算法,希望对数学建模有帮助。
利用matlab编程FFD算法完成装箱问题:设有6种物品,它们的体积分别为:60、45、35、20、20和20单位体积,箱子的容积为100个单位体积。
建立box_main.mfunction[box_count,b]=box_main(v) vmax=100;sort(v,'descend');n=length(v);b=zeros(1,n);for i=1:nb(i)=vmax;endbox_count=1;for i=1:nfor j=1:box_countif v(i)<=b(j) %可以放入 b(j)=b(j)-v(i);break;else%不可放入时continue;endendif j==box_countbox_count=box_count+1;endendbox_count=box_count-1;end主程序为:v=[60 45 35 20 20 20];[box_count,b]=box_main(v)结果:box_count =3 b =5 15 80 100 100 100所以,使用的箱子数为3, 使用的箱子的剩余空间为5,15 ,80。
“超市大赢家”提供了50种商品作为奖品供中奖顾客选择,车的容量为1000dm3 , 奖品i 占用的空间为wi dm3 ,价值为vi 元, 具体的数据如下:vi = { 220, 208, 198, 192, 180, 180, 165, 162, 160, 158,155, 130, 125, 122, 120, 118, 115, 110, 105, 101, 100, 100, 98,96, 95, 90, 88, 82, 80, 77, 75, 73, 72, 70, 69, 66, 65, 63, 60, 58,56, 50, 30, 20, 15, 10, 8, 5, 3, 1}wi = {80, 82, 85, 70, 72, 70, 66, 50, 55, 25, 50, 55, 40, 48,50, 32, 22, 60, 30, 32, 40, 38, 35, 32, 25, 28, 30, 22, 50, 30, 45,30, 60, 50, 20, 65, 20, 25, 30, 10, 20, 25, 15, 10, 10, 10, 4, 4, 2,1}。
matlab 多目标规划模型PPT课件
X(x1,x2,...x.n), 为决策变量
如对于求极大(max)型,其各种解定义如下: 绝对最优解:若对于任意的X,都有F(X*)≥F(X) 有效解:若不存在X,使得F(X*)≤ F(X)
弱有效解:若不存在X,使得F(X*)<F(X)
2、多目标优选问题的模型结构
可用效用函数来表示。设方案的效用是目标属性
矛盾性、不可公度性。
一般来说,多目标决策问题有两类.一类是多目标规划问题,其对 象是在管理决策过程中求解使多个目标都达到满意结果的最优方案. 另一类是多目标优选问题,其对象是在管理决策过程中根据多个目标 或多个准则衡量和得出各种备选方案的优先等级与排序.
多目标决策由于考虑的目标多,有些目标之间又 彼此有矛盾,这就使多目标问题成为一个复杂而困难 的问题.但由于客观实际的需要,多目标决策问题越来 越受到重视,因而出现了许多解决此决策问题的方法. 一般来说,其基本途径是,把求解多目标问题转化为求 解单目标问题.其主要步骤是,先转化为单目标问题,然 后利用单目标模型的方法,求出单目标模型的最优解, 以此作为多目标问题的解.
对于上述模型的三个目标,工厂 确定利润最大为主要目标。另两 个目标则通过预测预先给定的希
max( f 3 ( X )) 3 x 1 2 x 2
9 x1 4 x 2 240
4 3
x1 x1
5x2 10 x
200 2 300
x 1 , x 2 0
望达到的目标值转化为约束条件。 经研究,工厂认为总产值至少应 达到20000个单位,而污染控制 在90个单位以下,即
2. 过程:无妨设其次序为 f1, f2,, fp
先求解
min (P1)s.t.
f1(x) xS
目标管理-matlab多目标规划 精品

其中: x x1 x2
xn T ;Fx f1 x f2 x
f p x, p 2
令 R x | gi x 0, i 1,2,...,m,则称 R 为问题的可行域,V-min Fx指的是
对向量形式的 p 个目标函数求最小,且目标函数F x和约束函数 gi x 、hi x 可以
是线性函数也可以是非线性函数。
f x
f x
f1 x f2 x
f2 x f1 x
Re* a,b
O
ab
x
a
O a cd
b
bx
多目标规划的解集
❖ 解集之间的关系
(1)
p
若
i1
Ri*
,则 Ra*b
p
i 1
Ri*
(2) Re* Rw*e R
(3) Ri* Rw*e (i 1, 2,..., p)
(4) Ra*b Re*
优解。多目标规划问题的绝对最优解的全体可以记为 Ra*b ,其含义为:该最优解与 任意一个可行解都是可以进行比较的。下图为当 n 1, p 2 时绝对最优解的示意图。
f x
f x
f2 x f1 x
f1 x
f2 x
Ra*b a,b
O
x*
a
x
O
ab
x
b
多目标规划问题的的绝对最优解一般情况下是不存在的。事实上,如果把多目标
x1 x2 x3 40 0.48x1 0.65x2 0.42x3 20 20x1 700 25x2 800 15x3 500 x1, x2 , x3 0
多目标规划问题的数学模型
上述问题可以归结为标准形式:
V- min s.t.
Fx gi x 0 (i 1,2,...,m) hi x 0 (i 1,2,...,l)
线性规划算法的应用及其MATLAB实现讲解

理学院毕业设计(论文)题目:线性规划算法的应用及其MATLAB实现专业数学与应用数学班级10122111学号1012211139姓名蒋芬指导教师许建强2013年5月2日线性规划算法的应用及其MATLAB实现摘要:线性规划作为一种优化工具,50年代后线性规划的应用范围不断扩大。
已被广泛的运用于军事,经济等部门,是辅助人们进行科学管理的一种数学方法。
它广泛应用现有的科学技术和数学方法,解决实际中的问题,帮助决策人员选择最优方案和决策。
本篇文章主要论述了线性规划的算法及其在实际生活中的几种典型的应用及算法在Matlab中的实现。
如在运输中的应用,通过线性规划计算出的方案合理安排人力物力等资源,使经济效果达到最好。
利用lingo软件得出模型运行结果,分析模型的影子价格。
关键词:线性规划的算法、最优方案、Matlab、应用、lingo、影子价格Application of MATLAB linear programmingalgorithmAbstract:Linear programming as an optimization tool, After the 1950s, the scope of application of linear programming continues to expand. Has been widely used in military, economic and other sectors, Is a mathematical method to help people to achieve a scientific management It is widely used in the existing science and technology and mathematical methods to solve practical problems and help decision makers choose the best solution and decision making. This article discusses the linear programming algorithm and some typical applications and algorithms in real life implementations in Matlab. Such as transportation, computed by linear programming of the program reasonable arrangement manpower material resources, make the economic effect is the best.The results of model runs using the lingo software, the analysismodel of shadow price.Keywords: Linear programming algorithm, the optimal scheme, Matlab,Application,Lingo The shadow price目录1 引言 (4)1.1 课题的目的和意义 (4)1.2 国内外研究现状与发展趋势 (4)1.3 文献综述 (5)1.4 论文研究主要内容 (5)2 背景知识介绍 (6)2.1线性规划 (6)2.2运输问题 (7)2.3选址问题 (7)2.4线性规划几种常见的模型 (9)2.5小结 (10)3线性规划求解实际问题 (11)3.1运输问题 (11)3.1.1问题概述 (11)3.1.2实际问题模型建立及求解 (12)3.1.3结果分析 (15)3.1.4运输问题“影子价格” (15)3.2选址问题 (16)3.2.1问题概述 (16)3.2.2实际问题模型建立及求解 (17)3.2.3结果分析 (19)4总结 (20)5致谢 (20)6参考文献 (21)7附录 (22)7.1程序 (22)1引言1.1课题的目的和意义线性规划法是解决多变量最优决策的数学方法,是在各种相互关联的多变量约束条件下,解决或规划一个对象的线性目标函数最优的问题,即给与一定数量的人力、物力和资源,如何应用而能得到最大经济效益。
如何在Matlab中进行线性规划问题求解

如何在Matlab中进行线性规划问题求解线性规划(Linear Programming,LP)是数学规划的一个重要分支,其能够高效地解决许多实际问题。
在工业、运输、金融等领域中,线性规划的应用十分广泛。
而Matlab作为一种功能强大的数学软件,也提供了许多工具和函数用于线性规划问题的求解。
本文将介绍在Matlab中进行线性规划问题求解的基本步骤和常用函数。
一、线性规划概述线性规划是一种寻找线性目标函数在线性约束条件下的最优解的方法。
通常情况下,线性规划问题可以表示为:max/min z = c^T * xsubject to A * x <= bx >=0其中,c和x是n维向量,A是m×n的矩阵,b是m维向量。
目标是求解向量x的取值,使得目标函数c^T * x在满足约束条件A * x <= b和x >=0的前提下,取得最大(或最小)值z。
二、Matlab中线性规划求解函数Matlab中提供了多个函数用于线性规划问题的求解,其中最常用的是“linprog”函数。
linprog函数的基本语法如下所示:[x, fval, exitflag, output] = linprog(f, A, b, Aeq, beq, lb, ub, options)其中,参数f是目标函数的系数向量,A和b是不等式约束的矩阵和右侧向量,Aeq和beq是等式约束的矩阵和右侧向量,lb和ub分别是变量的下界和上界向量,options是优化选项。
三、解决实际问题的例子假设有一家电子公司,为了提高利润,决定如何分配生产资源。
公司生产三种产品A、B、C,每种产品所需的生产时间分别为5小时、10小时和15小时。
已知公司每周的生产时间为80小时,每单位产品的利润分别为5、8和10。
现在问题是如何分配生产时间,使得总利润最大化。
首先,我们需要确定目标函数和约束条件。
根据题意,我们可以将目标函数设置为z = 5*x(1) + 8*x(2) + 10*x(3),其中x(1)、x(2)和x(3)分别表示产品A、B、C的生产数量。
用MATLAB求解线性规划

模型 1 固定风险水平,优化收益
目标函数: 约束条件:
n 1
Q=MAX (ri pi )xi
i 1
qi xi ≤a
M
(1 p )x M , ii
xi≥ 0
i=0,1,…n
b.若投资者希望总盈利至少达到水平 k 以上,在风险最小的 情况下寻找相应的投资组合。
模型 2 固定盈利水平,极小化风险
从 a=0 开始,以步长△a=0.001对下列组合投资模型求解, 并绘图表示 a 与目 标函数最优值 Q 的对应关系:
max s.t.
Q = (-0.05, -0.27, -0.19, -0.185, -0.185) (x0,x1,x2,x3,x4) T
x0 + 1.01x1 + 1.02x2 +1.045x3 +1.065x4 =1
目标函数: R= min{max{ qixi}} 约束条件:
n
(r i
p )x
i
i
≥k,
i0
(1 pi )xi M , xi≥ 0
i=0,1,…n
c.投资者在权衡资产风险和预期收益两方面时,希望选择 一个令自己满意的投资组合。
因此对风险、收益赋予权重 s(0<s≤1),s 称为投资偏好 系数.
2.当投资越分散时,投资者承担的风险越小,这与题意一致。即: 冒险的投资者会出现集中投资的情况,保守的投资者则尽量分散投资。
3.曲线上的任一点都表示该风险水平的最大可能收益和该收益要求的最 小风险。对于不同风险的承受能力,选择该风险水平下的最优投资组合。
4.在a=0.006附近有一个转折点,在这一点左边,风险增加很少时,利润增长
符号规定:
Si
10.应用MATLAB软件求解线性规划

1 1
x1, x2 0
min S x1 x2
(5)
s.t. x1x13xx22
2 1题
max
min
m
ai1xi ,
m
ai2 xi ,L
,
m
ain xi
i 1
i 1
i 1
s.t.
x1 xi
x2 0,
L xm i 1, 2,L
1 ,m
5.如果x(1),x(2), ,x(k)都是线性规划问题(LP):
max S cx, Ax b, x o
的可行解,则它们的任意凸组合也是(LP)的可行解;如果x(1),x(2),
(2)
s.t
x1 2 x1
x2 2 x2
x3 x3
10 20
x1, x2 , x3 0
max S 14x1 13x2 6x3
2x1 4x2 x3 60
应用MATLAB软件求解 线性规划
• MATLAB(MATrix LABoratory)的基本含义是矩阵实验室 ,它是由美国MathWorks公司研制开发的一套高性能的集数 值计算、信息处理、图形显示等于一体的可视化数学工具软 件。它是建立在向量、数组和矩阵基础之上的,除了基本的 数值计算、数据处理、图形显示等功能之外,还包含功能强 大的多个“工具箱”,如优化工具箱(optimization toolbox) 、统计工具箱、样条函数工具箱和数据拟合工具箱等都是优 化计算的有力工具。在这里仅介绍用MATLAB6.5优化工具箱 求解线性规划问题。
烟酸(mg)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
** * T C ( x1 , , x* n) .
(5)
利用(5)式来求解的关键是对伸缩指标的 d i 确定, d i 是我们选择的一些常数,由于在多 目标线性规划中,各子目标难以同时达到最大值 Z i ,但是可以确定的是各子目标的取值范 围,它满足: Z i Z i Z i ,所以,伸缩因子为 d i 可以按如下取值: d i Z i Z i .
多目标线性规划的若干解法及 MATLAB 实现
一.多目标线性规划模型
多目标线性规划有着两个和两个以上的目标函数,且目标函数和约束条件全是线性函 数,其数学模型表示为:
z1 c11 x1 c12 x2 c1 n x n z c x c x c x 21 1 22 2 2n n max 2 zr cr 1 x1 cr 2 x2 crn xn
*
的方法很多,有专家打分法、容限法和加权因子分解法等). 例 2:对例 1 进行线性加权和法求解。 (权系数分别取 1 0.5 , 2 0.5 ) 解:构造如下评价函数,即求如下模型的最优解。
min{0.5 (3 x1 2 x2 ) 0.5 ( 4 x1 3 x2 )} s.t2 x1 3x2 18 2 x1 x2 10 x1 , x2 0
4.4 目标规划法
Appr Z ( x ) Z 0
xD xD
(4)
并把原多目标线性规划(3) min Z ( x) 称为和目标规划(4)相对应的多目标线性规划。 为了用数量来描述(4) ,我们在目标空间 E 中引进点 Z ( x )与Z 之间的某种“距离”
r 0
D[ Z ( x ),Z 0 ] [ i ( Z i ( x ) Z i* ) 2 ]1/ 2
i 1
r
这样(4)便可以用单目标 min D[ Z ( x),Z ] 来描述了。
xD
0
例 4:对例 1 对进行目标规划法求解: 解:MATLAB 程序如下,首先编写目标函数的 M 文件: function f=myfun3(x) f(1)=3*x(1)-2*x(2); f(2)=-4*x(1)-3*x(2); >> goal=[18,10]; weight=[18,10]; x0=[1,1]; A=[2,3;2,1]; b=[18,10]; lb=zeros(2,1); >> [x,fval]=fgoalattain('myfun3',x0,goal,weight,A,b,[],[],lb,[]) 结果输出为:x = 0.0000 6.0000 fval = -12 -18 则对应的目标值分别为 f1 ( x ) 12 , f 2 ( x ) 18 .
* * *
例 5:对例 1 进行模糊数学方法求解: 解:①分别求得 f1 ( x ) , f 2 ( x ) 在约束条件下的最大值为: Z (12, 24) . ②分别求得 f1 ( x ) , f 2 ( x ) 在约束条件下的最小值为: Z (15, 0) . 伸缩因子为 d i (27, 24) 然后求如下模型的最优解:
T
,
Z ( Z1 , Z 2 , , Z r ) T .
则上述多目标线性规划可用矩阵形式表示为:
max Z Cx
约束条件:
Ax b x 0
(3)
二.MATLAB 优化工具箱常用函数 [3]
在 MATLAB 软件中, 有几个专门求解最优化问题的函数, 如求线性规划问题的 linprog、 求有约束非线性函数的 fmincon 、求最大最小化问题的 fminimax 、求多目标达到问题的 fgoalattain 等,它们的调用形式分别为: ①.[x,fval]=linprog(f,A,b,Aeq,beq,lb,ub) f 为目标函数系数,A,b 为不等式约束的系数, Aeq,beq 为等式约束系数, lb,ub 为 x 的下 限和上限, fval 求解的 x 所对应的值。 算法原理:单纯形法的改进方法投影法 ②.[x,fval ]=fmincon(fun,x0,A,b,Aeq,beq,lb,ub) fun 为目标函数的 M 函数, x0 为初值,A,b 为不等式约束的系数, Aeq,beq 为等式约束
(2)
若(1)式中只有一个 zi ci1 x1 ci 2 x2 cin xn ,则该问题为典型的单目标线性规 划 。 我 们 记 : A (aij ) mn , C (cij ) r n , b (b1 , b2 , , bm )
T
, x ( x1 , x2 , , x n )
max f1 ( x) 3 x1 2 x2 max f 2 ( x) 4 x1 3 x2 s.t2 x1 3x2 18 2 x1 x2 10 x1 , x2 0
解:先分别对单目标求解:
①求解 f1 ( x ) 最优解的 MATLAB 程序为 >> f=[3;-2]; A=[2,3;2,1]; b=[18;10]; lb=[0;0]; >> [x,fval]=linprog(f,A,b,[],[],lb) 结果输出为:x = 0.0000 6.0000 fval = -12.0000 即最优解为 12. ②求解 f 2 ( x ) 最优解的 MATLAB 程序为 >> f=[-4;-3]; A=[2,3;2,1]; b=[18;10]; lb=[0;0]; >> [x,fval]=linprog(f,A,b,[],[],lb) 结果输出为:x =3.0000 4.0000 fval =-24.0000 即最优解为 24. 于是得到理想点: (12,24). 然后求如下模型的最优解
约束条件为:
(1)
a11 x1 a12 x2 a1 n x n b1 a x a x a x b 21 1 22 2 2n n 2 a x a x a x b mn n m m1 1 m 2 2 x1 , x2 , , xn 0
系数, lb,ub 为 x 的下限和上限, fval 求解的 x 所对应的值。 算法原理:基于 K-T(Kuhn-Tucker)方程解的方法。 ③.[x,fval ]=fminimax(fun,x0,A,b,Aeq,beq,lb,ub) fun 为目标函数的 M 函数, x0 为初值,A,b 为不等式约束的系数, Aeq,beq 为等式约束 系数, lb,ub 为 x 的下限和上限, fval 求解的 x 所对应的值。 算法原理:序列二次规划法。 ④.[x,fval ]=fgoalattain(fun,x0,goal,weight,A,b,Aeq,beq,lb,ub) fun 为目标函数的 M 函数, x0 为初值,goal 变量为目标函数希望达到的向量值, wight 参数指定目标函数间的权重,A,b 为不等式约束的系数, Aeq,beq 为等式约束系数, lb,ub 为 x 的 下限和上限, fval 求解的 x 所对应的值。 算法原理:目标达到法。
之下,寻求距离 Z 最近的 Z 作为近似值。一种最直接的方法是最短距离理想点法,构造评 价函数
*
(Z )
然后极小化 [ Z ( x)] ,即求解
[ Z
i 1
r
i
Z i* ] 2Hale Waihona Puke ,min [ Z ( x)]
xD *
[ Z ( x) Z
i 1 i
r
* 2 i
] ,
并将它的最优解 x 作为(3)在这种意义下的“最优解” 。 例 1:利用理想点法求解
4.2 线性加权和法
在具有多个指标的问题中, 人们总希望对那些相对重要的指标给予较大的权系数, 因而 将多目标向量问题转化为所有目标的加权求和的标量问题, 基于这个现实, 构造如下评价函 数,即
min Z ( x) i Z i ( x)
xD i 1
r
将它的最优解 x 作为(3)在线性加权和意义下的“最优解” 。 ( i 为加权因子,其选取
4.3 最大最小法
在决策的时候,采取保守策略是稳妥的,即在最坏的情况下,寻求最好的结果,按照 此想法,可以构造如下评价函数,即
( Z ) max Z i
1 i r
然后求解:
*
min [Z ( x )] min max Z i ( x )
xD xD 1i r
并将它的最优解 x 作为(3)在最大最小意义下的“最优解” 。 例 3:对例 1 进行最大最小法求解: 解:MATLAB 程序如下,首先编写目标函数的 M 文件: function f=myfun12(x) f(1)=3*x(1)-2*x(2); f(2)=-4*x(1)-3*x(2); >> x0=[1;1];A=[2,3;2,1];b=[18;10];lb=zeros(2,1); >> [x,fval]=fminimax('myfun12',x0,A,b,[],[],lb,[]) 结果输出为:x =0.0000 6.0000 fval = -12 -18 则对应的目标值分别为 f1 ( x ) 12 , f 2 ( x ) 18 .
min [ f ( x)] [ f1( x) 12] 2 [ f 2 ( x) 24] 2
xD
s.t2 x1 3x2 18 2 x1 x2 10 x1 , x2 0
MATLAB 程序如下: >> A=[2,3;2,1]; b=[18;10]; x0=[1;1]; lb=[0;0]; >> x=fmincon('((-3*x(1)+2*x(2)-12)^2+(4*x(1)+3*x(2)-24)^2)^(1/2)',x0,A,b,[],[],lb,[]) 结果输出为:x = 0.5268 5.6488 则对应的目标值分别为 f1 ( x ) 9.7172 , f 2 ( x ) 19.0536 .