基于视频的车辆检测技术及其在智能交通中的应用
智能交通系统中的车辆行为识别与检测

智能交通系统中的车辆行为识别与检测1. 引言智能交通系统的发展使得城市交通管理变得更加智能化和高效化。
其中,车辆行为识别与检测是智能交通系统中的重要组成部分。
通过对车辆行为的准确识别和检测,可以实现对交通流量的监控、交通事故的预防和交通管理的优化。
本文将重点介绍智能交通系统中车辆行为识别与检测的技术和应用。
2. 车辆行为识别车辆行为识别是指通过对车辆的运动轨迹和行为特征进行分析和提取,来判断车辆的行为。
常见的车辆行为包括车辆的加速、减速、转弯、停车等。
车辆行为识别可以基于视频监控、GPS定位、雷达感知等多种技术手段来实现。
2.1 视频图像识别通过视频图像识别技术可以实现对车辆行为的精确识别。
首先,利用计算机视觉技术对视频图像进行目标检测,将车辆从背景中分离出来。
然后,通过运动估计和跟踪算法,提取车辆的运动轨迹和行为特征,如速度、加速度和转弯角度等。
最后,通过模式识别和机器学习算法对提取的特征进行分析和分类,实现对车辆行为的识别。
2.2 GPS定位技术利用全球定位系统(GPS)可以实时获取车辆的位置信息和速度信息,从而实现对车辆行为的识别和检测。
通过分析车辆的轨迹和移动速度,可以判断车辆的行为。
例如,当车辆的速度突然降低且持续一段时间时,可以判断车辆正在减速或停车。
当车辆的行驶方向发生改变时,可以判断车辆正在转弯。
3. 车辆行为检测车辆行为检测是指通过对车辆行为进行实时监测和分析,判断是否存在违法行为或危险行为。
常见的车辆行为检测包括超速行驶、逆行、闯红灯等。
3.1 超速行驶检测通过车辆的GPS定位数据和地图数据,可以计算车辆的实际行驶速度。
与此同时,交通管理部门设定了一定的限速标准。
通过对车辆实际速度和限速标准进行比较,可以判断车辆是否存在超速行驶的情况。
当车辆的速度超过限速标准时,系统会发出警报并记录相关证据。
3.2 逆行检测逆行是指车辆在道路上逆向行驶的行为。
通过视频监控系统和交通信号控制系统,可以实时监测车辆的行驶方向。
智能交通系统中的视频分析与处理技术
智能交通系统中的视频分析与处理技术一、引言智能交通系统(ITS)是运用现代科技手段,结合计算机、通信和传感技术,对交通方式、交通流量和交通环境等进行监控、预测和控制的交通管理系统。
其中,视频分析与处理技术作为ITS 中的重要组成部分,具有重要的应用价值和广阔的发展前景。
本文将通过对智能交通系统中的视频分析与处理技术进行深入探讨,以期加深对该领域的理解和应用。
二、视频分析技术的基础1. 图像采集与预处理智能交通系统通过摄像头等设备采集道路交通视频图像,并对图像进行预处理,如去噪、增强等。
这一步骤的目的是为后续的分析与处理提供清晰的图像基础。
2. 视频目标检测与跟踪视频目标检测与跟踪是智能交通系统中的核心环节之一,它主要通过检测和跟踪图像中的交通目标,如车辆、行人等。
目前常用的目标检测与跟踪算法包括背景建模、移动目标检测与跟踪、行人检测与跟踪等。
三、视频分析技术的应用1. 交通流量监测与预测通过对视频图像进行分析和处理,智能交通系统可以实时监测道路上的交通流量,并利用历史数据和模型预测未来的交通流量状况。
这对交通管理部门来说具有重要的意义,可以帮助他们做出科学的决策,优化交通流动效率。
2. 交通事故检测与预警智能交通系统能够通过视频分析技术实现对交通事故的快速检测与预警。
通过对视频图像中的交通目标的行为进行分析和建模,系统可以实时发现异常行为,并通过联网设备发送警报,及时通知交通管理人员和相关部门。
这种方式大大提高了交通事故的检测与处理效率,有助于减少交通事故的发生。
3. 交通违法行为监测与处理交通违法行为的监测与处理一直是交通管理部门的重要任务。
智能交通系统通过视频分析技术可以自动检测和识别交通违法行为,如闯红灯、逆行、超速等。
一旦发现交通违法现象,系统可以自动拍摄证据图像,并通过联网设备将证据发送给相关部门,实现快速处理。
四、视频分析技术的挑战与改进虽然视频分析技术在智能交通系统中具有广泛的应用前景,但也面临着许多挑战。
智能交通系统中基于视频图像处理的车辆检测与跟踪方法综述
智能交通系统中基于视频图像处理的车辆检测与跟踪方法综述一、概述随着科技的快速发展和城市化进程的推进,智能交通系统(ITS)已经成为现代交通领域的重要研究方向。
基于视频图像处理的车辆检测与跟踪方法是智能交通系统的重要组成部分,对于提高道路安全、优化交通流量、实现智能交通管理具有重要意义。
基于视频图像处理的车辆检测与跟踪方法主要利用计算机视觉和图像处理技术,对视频序列中的车辆进行自动检测、跟踪和识别。
这种方法可以实时获取道路交通信息,为交通管理和规划提供数据支持。
同时,通过车辆检测与跟踪,还可以实现车辆行为分析、交通事件检测等功能,为智能交通系统的进一步发展提供有力支持。
近年来,随着深度学习、机器学习等人工智能技术的快速发展,基于视频图像处理的车辆检测与跟踪方法也取得了显著的进步。
通过构建深度学习模型,可以实现对车辆目标的准确、快速检测,同时利用多目标跟踪算法,实现对多辆车辆的连续跟踪。
这些技术的发展为智能交通系统的车辆检测与跟踪提供了新的解决方案,也为未来的智能交通发展奠定了坚实的基础。
基于视频图像处理的车辆检测与跟踪方法仍然面临一些挑战,如复杂交通场景下的车辆遮挡、光照变化、动态背景干扰等问题。
未来研究需要不断探索新的算法和技术,提高车辆检测与跟踪的准确性和鲁棒性,以适应智能交通系统的发展需求。
本文将对基于视频图像处理的车辆检测与跟踪方法进行综述,介绍其基本原理、发展历程、现状以及未来的发展趋势。
通过总结现有方法的优点和不足,为未来的研究提供参考和借鉴。
同时,本文还将探讨当前面临的挑战和未来的研究方向,为智能交通系统的进一步发展提供有益的探索和启示。
1. 智能交通系统概述智能交通系统(Intelligent Traffic Systems,ITS)是信息技术、数据通信技术、传感器技术、电子控制技术以及计算机技术的综合应用,旨在构建一种大范围内、全方位发挥作用的实时、准确、高效的综合运输和管理系统。
基于视频车辆运动轨迹场的交通事件检测方法

基于视频车辆运动轨迹场的交通事件检测方法交通事件检测是指利用视频车辆运动轨迹场进行交通事故、交通拥堵等交通事件的实时监测和预警的方法。
基于视频车辆运动轨迹场的交通事件检测方法,主要通过分析视频中的车辆运动轨迹场,提取其中的特征信息,使用机器学习和计算机视觉的方法来检测交通事件。
本文将介绍交通事件检测的流程和主要方法,以及相关应用和未来发展方向。
交通事件检测的流程主要包括数据采集、特征提取和事件检测三个步骤。
首先,需要利用视频摄像头等设备对道路上的车辆进行采集,获取车辆的位置、速度、方向等信息,形成视频车辆运动轨迹场。
接下来,通过对视频车辆运动轨迹场进行处理和分析,提取其中的特征信息。
最后,利用机器学习和计算机视觉的方法,对提取的特征信息进行分类和判断,判断是否发生交通事件。
在特征提取方面,可以利用车辆的位置、速度、加速度等信息来构建特征向量。
例如,可以根据车辆在一段时间内的速度变化情况来判断是否发生交通拥堵。
此外,还可以利用车辆之间的相对位置关系来判断是否发生交通事故。
例如,如果车辆之间的距离大于一定阈值,则可能发生了事故。
在事件检测方面,可以使用机器学习方法来进行分类和判断。
可以收集一定数量的正常和异常的视频车辆运动轨迹场数据,并将其分为训练集和测试集。
然后,使用机器学习算法,如支持向量机(SVM)、卷积神经网络(CNN)等,对训练集进行训练,得到分类模型。
最后,使用分类模型对测试集进行测试,判断是否发生交通事件。
交通事件检测方法可以应用于交通管理、交通安全等领域。
例如,可以利用交通事件检测方法对交通拥堵进行实时监测和预警,帮助交通部门及时采取措施减缓交通拥堵。
此外,还可以利用交通事件检测方法在交通事故发生后及时发出预警,帮助救护车等应急车辆快速抵达事故现场。
未来,交通事件检测方法可以进一步发展和完善。
一方面,可以进一步改进特征提取方法,提高特征的准确性和效率。
另一方面,可以引入更先进的机器学习和计算机视觉的方法,提高交通事件检测的准确率和实时性。
基于视频的智能交通研究
中图分类号 :T 31 1 P 9. 4
文献标识码 :A
文章嫡号 :10— 59( 02 0 — 14 0 0 7 9 9 2 1 ) 2 0 5— 2
Vi e - a e n el e t a s o t t n S u y d o b sd I tlg n i Tr n p ra i t d o
计 算机 光盘 软件 与应 用
多媒体技 术及应用
C m u e D S f w r n p l c t o s o p t rC o t a e a d A p a n i i 2 1 第 2期 0 2年
基于视频的智能交通研究
李洪敏 ( 苏州大学 ,江 苏苏州 2 52 ) 10 1
c ure o tdy i i l a d a c ae ma t rt o io h n e s ci n a d 仃afc lw d o d rsta in. o o s ft su Stmey c u t se o m n trt e it re to he n r n fi a a r e iu to t c mm a dn n he n i g
摘 要 :现在 社会 的发 展很 快 ,城 市 交通 容量 的 不断增 加 ,车 辆数 目的 大幅增加 。基 于视 频 的 交通监 控 系统 就迅 速发 展起 来 。 它是 一 种将 视频 图像 处理技 术 与模 式识 别相 结合 的技 术。 由 于传 统 的视 频是 比较 难 实现 的 。智 能交通 通 过对视 频 数 据 中对 所 包含 的视 觉 内容信 息进行 了 自动研 究和分 析 以及特 征 的提 取 ,这样 人 们就 可 以直接 利 用计 算机 视频 技 术搜 索寻
找相应的信息。在计算机 的视频 中采用 了图像 处理、计算机视 觉、模式识别等技术处理计算机 的视频 图像 在研究过程中 视频交通的研 究意义很重大主要是是及时准确地掌握所监视路 口和交通治安情 况等,为指挥人 员提供迅速直观的指导信息 从 而做 出准确 判 断并及 时响应 。
智能交通系统中基于视频的车辆检测方法

智能交通系统中基于视频的车辆检测方法智能交通系统的快速发展和应用,改变了我们对城市交通的认识和管理方式。
在这个系统中,车辆检测是一个关键的环节,它对实现智能交通管理、提高交通效率和安全性起着至关重要的作用。
视频技术作为智能交通系统中最常用的一种检测方法之一,以其高效、准确和实时性成为了车辆检测的首选方法之一。
基于视频的车辆检测方法可以分为两个主要步骤:前景提取和车辆检测与跟踪。
前景提取通过对视频图像的对比度、颜色、运动等特征进行分析,将前景目标与背景进行区分。
常见的前景提取算法包括帧差法、背景减除法和光流法等。
其中,背景减除法是最常用的一种方法,它通过建立背景模型来动态地更新背景图像,从而准确地提取前景目标。
在前景提取的基础上,车辆检测与跟踪是接下来的关键步骤。
车辆检测与跟踪的目标是在前景目标中准确地识别和跟踪车辆,并将其与其他非车辆目标进行区分。
传统的车辆检测方法主要依赖于图像处理技术,如边缘检测、灰度变换和形态学处理等。
然而,由于车辆的形状和外观的多样性,传统方法往往存在一定的局限性和缺陷。
为了克服传统方法的局限性,近年来,基于深度学习的车辆检测与跟踪方法得到了广泛的应用。
深度学习技术以其强大的特征学习能力和自适应性在图像处理领域取得了巨大的成功。
基于深度学习的车辆检测方法主要包括两个关键步骤:特征学习和目标检测。
特征学习利用深度神经网络自动地学习和提取图像中的有用特征,将其转化为高级语义特征。
目标检测利用训练好的深度神经网络对特征图进行目标识别和位置定位,实现对车辆的准确检测与跟踪。
除了基于深度学习的方法,基于视频的车辆检测还可以结合其他传感器和技术,如雷达、红外传感器和激光雷达等。
这些传感器可以提供关于车辆位置、速度、方向等更详细和全面的信息,从而提高车辆检测的准确性和鲁棒性。
例如,激光雷达可以通过测量反射激光束的时间和强度来准确地检测车辆及其周围环境,同时还可以避免遮挡和光照条件的影响。
基于视频技术的直接交通事件检测
基于视频技术的直接交通事件检测高速公路和城市快速路是承担我国公路运输和城市道路运输的主要道路,具有车速快、流量大等许多特点,一旦发生突发交通事件,极易引发交通事故,严重影响道路的通行能力和运营效率。
在日常的交通运行和交通管理中,如果仅仅依靠人工报告,电视监视等非自动检测方法发现交通事件,不但浪费大量的资源,而且不全面及时,给交通安全带来了隐患。
因此,交通事件自动检测技术越发成为智能交通的研究热点,旨在第一时间快速发现交通事件的地点,利于及时处理交通事件。
交通事件指偶发性交通事故、车辆抛锚、恶劣天气、货物散落、道路养护、体育赛事、规模集会等交通情况。
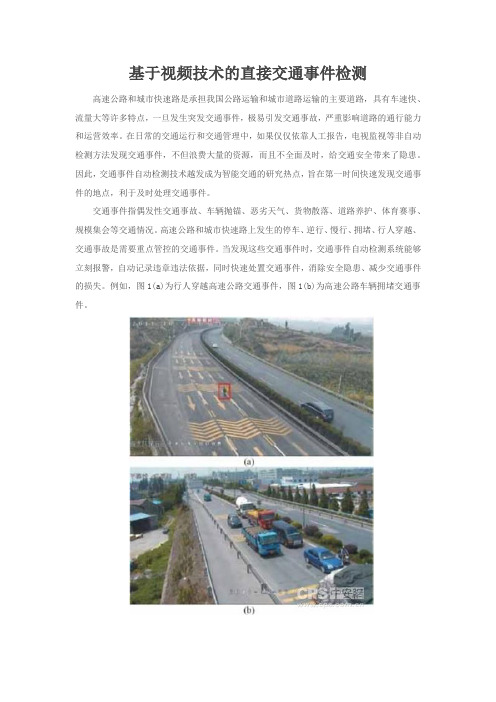
高速公路和城市快速路上发生的停车、逆行、慢行、拥堵、行人穿越、交通事故是需要重点管控的交通事件。
当发现这些交通事件时,交通事件自动检测系统能够立刻报警,自动记录违章违法依据,同时快速处置交通事件,消除安全隐患、减少交通事件的损失。
例如,图1(a)为行人穿越高速公路交通事件,图1(b)为高速公路车辆拥堵交通事件。
交通事件的视频检测技术研究概述交通事件自动检测方法图2为交通事件检测研究方法结构示意图,分为自动和非自动检测方法,其中非自动技术主要包括人工报告,电视监视等,自动技术主要有直接和间接检测法。
直接检测法是一种基于视频的处理方法,通过交通事件视频检测算法,直接检测交通事件。
间接检测法是一种基于交通流参数的处理方法,通过模式识别、数学统计、交通模型、人工智能等方法,融合交通流数据检测交通事件。
直接法和间接法的特点可总结如下:1、由于交通系统具有很强的非线性、模糊性、不确定性,研究表明间接法有许多不足之处,不但安装麻烦,而且费用较高,在交通流密度高时,间接法具有较好的检测效果,在交通密度低时检测效果不好。
2、由于直接法是根据视频图像内容,直接判断是否有交通事件发生,研究表明直接法的判别速度上远远胜于间接法,即使交通流量很低,也能对交通事件进行良好的判断。
智能交通系统的视频监控分析与车辆识别方法

智能交通系统的视频监控分析与车辆识别方法随着城市化进程的不断加快,交通拥堵成为城市发展的一大难题。
为了解决这一问题,智能交通系统应运而生。
智能交通系统利用现代信息技术,通过视频监控和车辆识别方法,对交通流量、行驶状态等进行实时监测和分析,从而提供基于数据的智能交通管理解决方案。
本文将重点介绍智能交通系统中的视频监控分析与车辆识别方法。
视频监控是智能交通系统中的重要组成部分。
它通过摄像机对交通路段进行连续拍摄,并将采集到的视频信号传输到监控中心进行处理。
视频监控分析主要包括目标检测、目标跟踪和目标识别等步骤。
目标检测是视频监控分析中的第一步。
它旨在从视频中检测出交通场景中的车辆。
目标检测通常通过使用计算机视觉和机器学习的方法来实现。
目前比较常用的目标检测算法包括基于图像特征的方法(如Haar特征和HOG特征)和基于深度学习的方法(如卷积神经网络)。
这些算法可以对交通场景中的前景目标进行检测,并生成目标的位置和边界框。
目标跟踪是视频监控分析中的第二步。
它旨在在连续的视频帧中跟踪目标的运动轨迹。
目标跟踪算法通常应用于目标检测的结果,将静态的目标转变为动态的轨迹。
常用的目标跟踪算法包括卡尔曼滤波器、粒子滤波器和相关滤波器等。
这些算法可以根据目标的运动模型和观测信息,实时估计目标的位置和速度。
目标识别是视频监控分析中的最后一步。
它旨在识别目标的类别和属性。
目标识别算法通常根据目标的外观和结构特征进行分类。
常见的目标识别算法包括支持向量机、隐马尔可夫模型和卷积神经网络等。
这些算法可以对车辆进行分类,识别出车辆的类型(如轿车、卡车、摩托车等)和属性(如品牌、颜色等)。
车辆识别是智能交通系统中的关键技术,它为交通管理提供了重要的数据支持。
车辆识别通过对交通场景中的车辆进行特征提取和分类判别,实现对车辆的自动识别。
车辆识别方法主要包括基于特征的方法和基于深度学习的方法。
基于特征的方法是传统的车辆识别方法,它依靠提取车辆的形状、纹理和颜色等特征进行分类。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于视频的车辆检测技术及其在智能交通中的应用
智能交通系统(ITS),随着信息技术、计算机技术、数据通信传输技术、模式识别技术、图像处理技术等学科的迅猛发展,得到了日益广泛的应用,极大提高了交通管理的智能化、科学化、规范化水平。
特别是计算机视觉技术的发展为提高交通系统智能化程度,提供了有效手段。
一、主要车辆检测技术及性能比较
依据车辆检测触发方式的不同,现有的车辆检测器主要分为以下几类:电磁感应、红外感应、微波感应、超声波、视频检测方式等。
电磁感应线圈(ILD)是一种普遍采用的方式,采用感应线圈应用到车辆检测中,开始于上个世纪70年代。
其基本原理是在路面检测区域敷设感应线圈,当车辆经过线圈上方时,线圈电感量会发生变化,利用这种变换来检测是否有车辆通过。
其优点是:该技术因为比较可靠的检测车辆,技术成熟、易于掌握,计数精确,同时系统稳定,受环境的影响较少。
价格低廉。
缺点是:安装过程对可靠性和寿命影响很大,维修或安装需中断交通,破坏路面,影响路面寿命。
同时线圈易被重型车辆、路面修理等损坏,而且它的维护难度大,不易移植,线圈容易在夏季断路。
红外传感器使用发射、接收器,发射光束并接收反射光束,
通过反射频率的变化进行对所需数据的检测。
优点:同一算法能够适用于昼、夜不同的时段,价格中等。
缺点:为了实现高灵敏度,可能需要很好的红外线焦平面检测器,来提高功率。
微波感应技术是利用雷达线性调频技术原理,对路面发射微波,通过对回波信号进行高速实时的数字化处理分析,实现车辆检测。
优点:能够应用于恶劣气候条件。
缺点:在车流拥堵以及大型车较多、车型分布不均匀的路段,由于遮挡,测量精度会受到比较大的影响,对安装高度要求严格,安装困难,价格也比较昂贵。
超声波检测器的原理是这样的,首先由传感器发射一束能量到检测区,然后接受反射回来的能量束,通过有关的换能装置,将能量转换成所需的数据,依据此数据判别被检测物是否存在或与传感器的位置。
优点:可靠性较高,易于安装。
缺点:性能随环境温度和气流影响而降低,价格较贵。
基于视频的车辆检测技术,通过摄像机实时得到交通场景,运用图像处理和模式识别的知识来检测车辆,得到了广泛的应用。
优点:易于安装调试,提供大量信息,价格适中。
缺点:夜晚及恶劣天气存在较大误差。
二、视频检测技术
(一)系统组成
系统所用的硬件有:摄像机、镜头、图像采集卡,计算机。
摄像机的功能是把光信号转换成电信号。
镜头是成像部件,图像
采集卡将摄像机输出的视频数据输入电脑,并转换成计算机可辨别的数字数据,存储在计算机中,成为可编辑处理的视频数据文件。
计算机则是根据编制的程序,对输入的视频数据进行分析,检测是否有车辆经过。
(二)主要方法及原理
基于视频的车辆检测技术,按照是否建立模型可以分成基于模型的和非模型的两类。
基于模型的方法中应用最广泛的背景减除(Backgr-ound subtraction)技术,即从当前帧和背景帧的差异来检测运动目标,因此运动目标的检测结果和背景好坏有直接关系,生成的背景应当独立于应用场景,对不同环境、光照有一定的适应能力,能够抑止摄像机的微小抖动和场景中微小运动,当场景发生显著变化时,应当能够自适应调整背景模型。
基于背景模型研究人员提出了不同的方法,
a、时间平均(tineaueragb)是最简单的方法,它对内存要求低,处理速度快。
b、采用最近n帧的中值作为背景模型方法。
以上两种方法对于场景中存在多个运动目标或目标运动缓慢时,前景会污染背景。
c、利用帧间差分(inter-frame differencd)信息来生成背景的方法,该方法能够应用于多个运动目标的场合,但更新率不容易选择。
d、用卡乐曼滤波器对每个像素建立模型来适应场景中的光照变化,其缺点是依赖于阈值的选择。
e、用K个高斯混合分布(Gaussian Mixture Model GMM)对每个像素进行建模方法,它解决了像素的多峰分布和缓慢变化的背景。
该方法假设像素符合高斯分布,实际像素颁布可能不满足该假设。
对于频繁变化的像素,需要多个高斯混合分布才能反映这种变化。
f、利用了图像变化的时间信息和图像空间信息,假设属于背景像素的邻域像素变化应当一致,但是对于存在显著差异的背景边界会引起误检测。
g、在整幅图像上进行特征值分解方法,充分利用空间相关性,它能取得较好效果,但要耗费大量内存,检测精度要低于高斯混合模型。
h、基于内核密度(Kernel Density Estination,KDE)估计的非参数背景模型,该方法能够适应不同的场景,不同于GMM,它充分利用最近的历史帧信息来更新背景模型,能够适应复杂的像素分布密度,因此能够得到较准确的估计,能够克服像素值在短时间内发生的频繁变化。
对于非模型的方法,最简单的是设定一个检测区域,即采用虚拟线圈的视频检测技术。
因为不依赖于特定的模型,因此实时性能好于基于模型的方法。
虚拟线圈的设置非常方便。
不需要切割路面、瑶族设线圈,观测范围大,维护、移植方便。
虚拟线圈
原理是在视频图像中设置检测线或检测区域来模拟感应线圈,当车辆经过检测线时,根据检测线像素的颜色、灰度等特征的变化来检测车辆。
基于虚拟线圈的方法因为其简单、易用、实时性高,因而得到广泛的应用。
此外,图像处理中的其他特征边缘,牌照等特征也可作为是否有车辆经过的依据。
图像边缘特征。
在车辆检测中主要表现在车辆头部的车牌照、通风栅格等存在着丰富的纹理信息,车辆在行驶过程中可以看作是做刚体运动。
因此可以依据边缘的密集程度来检测是否存在车辆。
此外,边缘对于光照变化有很强的鲁棒性。
牌照则是车辆身份的唯一标识,因此也可以把牌照作为车辆通过的依据。
(三)技术难点分析
1、高实时性
考虑高速公路的实际需求,对于车辆的检测不仅仅是统计车流量,还需要更精细的统计,如分车道、分车型、分时段统计车流量,对违章车辆进行抓拍,有的甚至要求只要有车辆通过就要抓拍车辆图片,进行存储,以备需要时查询。
因此,要求视频检测系统应当具有较高的实时性。
但是系统的实时性不仅取决于硬件的性能,也有赖于具体算法的实现。
一般说来,算法的复杂程度和检测的效果成正比。
因此,如果要保证实时性,就需要部分牺牲检测精度。
2、较高的准确度
通过视频车辆检测技术得到的交通流量数据,应当具有较高的可信度。
这部分有赖于算法的性能。
如前所述,精度和实时性是一对矛盾。
提高检测准确率,可能会影响实时性。
3、全天候工作
高速公路全天24小时运营,因此需要视频检测算法能够适应白天和晚上不同的光照条件。
同时算法应该克服白天的光线显著变化、阴影的影响,对晚上车灯的强光干扰应该有一定的鲁棒性。
此外对于恶劣天气如雨、雪、雾等的处理有一定的难度。
4、遮挡问题
无论是微波还是超声波检测技术,当存在车辆遮挡时,出现漏检测情况。
视频检测技术可以依据车辆的轮廓等先验知识部分解决这个问题,但是当视野较宽,小车被大车遮挡时,视频检测技术就无能为力。
为了解决遮挡问题,需要双目视觉来实现。
5、车辆跟随时的检测
感应线圈、微波、超声波、视频检测技术都面临着如何当面前后两辆车距离很近时,怎样把这两辆车区分开的技术难点。
三、视频车辆检测技术的应用
基于视频的车辆检测技术除了能提供传统检测技术的交通参数,如车道占有率、车流量、车辆行驶速度等基本参数,还能够提供分车道、分车型、分行驶方向的更为全面的统计。
更为重要的是能够提供经过车辆的图片。
因此,基于视频的车辆检测技术不仅能够广泛的应用于高速公路、普通路、桥梁、隧道等的交
通参数的实时统计,还可和牌照识别技术配合有效抑止、乃至杜绝高速公路收费中的倒卡作弊行为。
视频检测技术和雷达测速配合使用,对超速车辆进行抓拍,可以提高高速执法力度,减少违章行为,减少事故发生。
总之,基于视频的车辆检测技术在智能交通中应用越来越广泛,在智能交通的发展过程中将起到越来越重要的作用。