数字摄影测量实验教程
全数字摄影测量实习报告

全数字摄影测量实习报告学号:姓名:班级:专业:课程名称:数字摄影测量学指导老师:2013 年 1 月一、目的和要求了解全数字摄影测量的作业步骤。
二、资料及用具1、VirtuoZo全数字摄影测量系统一套;2、外业控制点资料一套:外业控制点成果及相对应的控制点位图3、相机参数数据一套:应该提供相机主点理论坐标X0、Y0,相机焦距f0,框标距或框标点标4、航片扫描数据:符合VirtuoZo图像格式及成图要求扫描分辨率的扫描影像数据。
VirtuoZo 可接受多种图像格式:如TIFF、BMP、JPG等。
一般选TIFF格式。
三、实验步骤⒈建立测区与模型的参数设置⑴数据准备完善后,进入VIrtuoZo主界面,首先要新建一个测区,通过文件 打开测区,新建一个名为hammer的测区,系统默认后缀名为blk,默认保存在系统盘下的Virlog文件夹里。
*.blk文件其实只是个索引文件,它最终指向的是设置测区里的测区主目录文件夹。
*.blk文件建立好之后,系统会自动弹出设置测区的对话框,按照原始数据提供的信息填写相应的内容,之后保存退出。
如图一所示控制点文件选择:hamer.grd加密点文件选择:hamer.grd相机检校文件选择rm30.cmr。
摄影比例尺:1:15000。
航带数:2。
影像类型:量测相机。
⑵数据准备1. 建立自己的文件夹,可选择D盘,D:\***。
2. ⑴将D:\VirtuoZo\Example\hamer\images文件夹中的下列文件拷贝到D:\xiaotaiye\images文件夹中:①01-155_50mic.tif等6个tif影像文件,②hamerIndex.html 和hamerIndex文件夹。
注:此文件为测区分布及控制点分布文件。
⑵将D:\VirtuoZo\Example\hamer文件夹中的hamer.grd 和rc30.cmr 两个文件拷贝到D:\***。
第四步,参数设置完成之后,还需要对影像文件进行转换,将各种影像文件转换成VirtuoZo 支持的影像格式(VirtuoZo系统有其自有的影像格式,文件格式为*.vz,后文简称该文件为VZ影像)。
数字摄影测量学课堂实验报告(遥感08-1、2)

河南理工大学测绘学院
《数字摄影测量学》教学实验报告
(专业必修课)
姓名:专业班级:
学号:序号:
指导教师:
2011年月日
┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄
实验成绩:
评语:
指导老师签名:
2011年月日
实习报告一:点特征提取
专业班姓名:学号:日期:
一、实验的目的与要求
通过实习掌握点特征提取的原理、方法和过程,并能用计算机编程实现。
二、实验设备
1、计算机一台
2、立体数字图像
3、VC 开发平台
三、实验步骤
1.软件编写与调试
2.点特征提取
3.提取结果分析
四、实验结果与体会
实习报告二:影像匹配
专业班姓名:学号:日期:
一、实验目的
掌握相关系数影像匹配的原理和基本过程,并能编程实现。
二、实验设备
1、计算机一台
2、立体数字图像
3、VC 开发平台
三、实验步骤
1.软件编写与调试
2.影像匹配
3.匹配结果分析
四、实验结果与体会。
数字摄影测量课程设计实习指导书
《数字摄影测量课程设计》实习指导书实习前准备:1)复习最小二乘平差的概念2)利用矩阵运算进行法方程的解算3)简单的剔除粗差的方法4)读取文本文件(浮点型、整型、字符型等)5)理解各个坐标系,掌握空间点→相片坐标→像素坐标的基本关系6)可以预先写好坐标转换的函数;a)根据相机参数,计算像素坐标到相片坐标的计算b)根据外方位元素,空间点到像点的计算7)矩阵运算: 转置、求逆、相乘8)读取bmp|raw图像类,保存bmp|raw图像的函数题目一两张影像的自动相对定向已知: 像片的像机参数和内方位元素,要求:根据像点特征提取,影像金字塔匹配,相对定向,对两张影像实现自动相对定向;输出:相对定向元素,像点上下视差的中误差,分工实现:特征点提取,金字塔多级匹配,最小二乘匹配,相对定向解算,小组人数:建议5-6人特征提取函数:题目二、前方交会、多片前方交会的计算要求:● 对同名像点,进行前方交会和多片前方交会;● 交会的空间坐标是否与实验的模拟数据的空间坐标一致,以验证算法的正确性;● 在像点上添加高斯噪声,再统计与模拟数据的空间坐标的差值,比较前方交会和多片前方交会的计算精度;需要编程的要点:⏹ 读像点文件、相机参数文件、外方位元素;⏹ 交会计算;⏹ 输出空间点坐标多像前方交会进行空间点的计算:根据共线方程线性化,ij a 是共线方程线性化的系数。
111213212223x xy y v a X a Y a Z l v a X a Y a Z l =∆-∆-∆-=∆-∆-∆-多像前方交会是线性化方程,需要初始值。
在方位元素已知情况下,空间点的初始坐标可以通过双像前方交会获得。
小组人数:建议1-2人题目三、绝对定向的实现要求:● 根据同名的空间点实现绝对定向;编程的要点:⏹读入同名点数据⏹输出绝对定向结果和各点残差,中误差小组人数:建议2-3人题目四、核线影像的生成要求:●根据原始影像和方位元素,生成水平核线影像;编程的要点:⏹读入内定向文件;⏹读写影像;⏹水平核线的计算;⏹影像内插小组人数:建议2-3人题目五、基于核线影像的密集匹配利用核线约束关系,实现影像匹配,要求点间隔密些小组人数:建议2-3人题目六、基于物方的影像匹配(VLL)要求:●基于VLL方法实现影像的物方匹配;编程的要点:⏹读影像;⏹根据物方近似坐标值及外方位元素解算像点坐标;⏹计算像点间的相关系数⏹寻找同名点并计算物方确定坐标小组人数:建议2-3人题目七、离散点构TIN输入:离散点(x, y, z)根据x,y坐标,按邻近原则,建立合理的点之间的邻接拓扑关系,输出:三角形列表小组人数:建议2-3人题目八、TIN内插DEM已知离散点,生成规则格网DEM可以利用题目八的结果小组人数:建议2-3人题目九、由DEM生成等高线要求:●根据给定的DEM文件,生成等高线,并输出;编程的要点:⏹读入DEM文件⏹等高线跟踪算法(重点)⏹输出等高线文件(按每条线,每条线的点xyz坐标输出)小组人数:建议2-3人题目十、正射影像的生成要求:●根据DEM、对应的原始影像和方位元素生成正射影像编程的要点:⏹读入DEM,外方位元素、相机参数、原始影像;⏹根据DEM设定正射影像的范围和分辨率;⏹输出正射影像文件和地理参数文件;小组人数:建议2-3人题目十一、DEM和正射影像的三维显示要求:●利用OpenGL显示DEM;●利用正射影像渲染DEM;●简单的浏览控制需要编程的要点:⏹OpenGL的显示环境设置;⏹DEM、正射影像的数据读取;⏹DEM的显示画法(点、线框、颜色设置);小组人数:建议2-3人题目十二半自动选点,仿射变换纠正影像设计要求:打开两幅影像,分别在左右两个视图显示,在左视图上选点,右视图上选中初始位置,则做精确匹配,选择超过3个点后,进行仿射变换纠正;●实现仿射变换参数的最小二乘解;●对给定的一幅存在变形的影像,利用仿射变换进行纠正;⏹需要编程的要点:⏹最小二乘解仿射变换的6个参数;⏹根据变换参数纠正影像;小组人数:建议2-3人实习要求及成果:每一个班按3人(最多4人)为一组自行分组,每一组选取一个题目,题目不得重复;要求自行查找资料,进行算法设计,注意分工,实现题目的要求。
数字摄影测量实验教程

数字摄影测量实验教程上机实验指导摄影测量实验室实验数据:数字航片:相机文件:控制点文件:控制点参照图。
实验一:Virtuo Zo数字摄影测量系统总体操作1 实验目的熟悉Virtuo Zo数字摄影测量系统软件的总体概况,了解其工作原理及其所能满足何种操作需求,。
掌握操作流程及其测区和模型的构建。
2 实验内容Virtuo Zo数字摄影测量系统各个功能菜单的使用方法;如何进行数据准备;重点掌握测区的建立以及模型的建立方法。
3、硬盘目录及测区目录1、硬盘目录结构简图如下:其中,系统目录的内容为:Bin目录:执行程序目录,存放系统的所有可执行程序及框标模板文件。
Virlog目录:存放测区的路径文件(c:\Virlog\Blocks\<测区名>.blk)2、测区目录某测区用户目录(在创建一个新Block时,系统以用户所给的测区名自动产生该测区目录),存放该测区所有参数文件及中间结果、成果等。
Images目录:影像目录,存放VirtuoZo影像文件、影像参数文件、内定向文件、影像外方位元素文件。
模型目录:系统以所给的模型目录名自动建立(如01-156_50mic.tif_01-155_50mic.tif.ste目录),存放该模型所有信息。
Product目录:4D产品目录,存放当前模型所有已生成的产品及输出文件。
TMP目录:核线影像目录,存放当前单模型的核线影像文件。
4 Virtuo Zo数字摄影测量系统工作流程图VirtuoZo的主界面上有十一个菜单项,依次为:文件、设置、空中三角测量、处理、产品、镶嵌、测图、显示、工具、向导和帮助5、建立测区和模型5.1 建立测区1. 新建或打开一个测区测区是待处理的航空影像所对应的地面范围(或区域)。
VirtuoZo 3.7(教学版)主界面中的文件菜单下将新建与打开合并为打开测区。
单击打开测区菜单项,系统弹出打开或创建一个测区对话框。
已存在的测区在列表框中被列出。
《数字摄影测量学》课堂实验报告(遥感)

河南理工大学测绘学院《数字摄影测量学》教学实验报告(专业必修课)┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄┄实验成绩:评语:指导老师签名:2012年月日实习报告一:点特征提取一、实验的目的与要求通过实习掌握点特征提取的原理、方法和过程,并能用计算机编程实现。
二、实验设备1、计算机一台2、立体数字图像3、VC 开发平台三、实验步骤1.编写Forstner点特征提取算子的软件,并进行调试。
2.进行BMP数字图像的点特征提取。
3.提取结果分析,评价特征点的提取的情况。
代码如下:double WINAPI Det(double N[], int n){if(n==4)return (N[0]*N[3]-N[1]*N[2]);elsereturn 0;}//计算矩阵N之迹(即对角线元素之和)的值//参数:大小为n的数组、数组宽度//返回值:矩阵N之迹double WINAPI Tr(double N[], int w){double sum=0.0;for(int i=0;i<w;i++)sum += *(N+i*w+i);return sum;}//判断该点是否为初选点//参数:大小为n的数组、数组维数、阈值//返回值:是,返回真;否,返回假BOOL WINAPI Mid(int dg[], int n,int T){BOOL flag=FALSE;int i=0,num=0;for(;i<n;i++)if(*(dg+i)>T)num++;if(num>1)flag=TRUE;return flag;}/////////////////////////////////////////////////////////////////////////////特征提取的函数(仅对灰度图象)//参数:块图象数据指针或数组、块图象宽、块图象高、局部非最大窗口宽、局部非最大窗口高//返回值:标记特征点位的二值化块图象指针void WINAPI ForstnerCha(BYTE image[],BYTE* newimage, int width, int height, int win_w, int win_h) {static int T=10;//提取初选点的阈值static double Tq=0.40;//阈值int i,j,l,m,n;//计数器int dg[4];//上下左右四个方向的差分绝对值// BYTE* newimage=new BYTE[width*height];//为保存特征点开辟的数组BYTE t,t1,t2,t3,t4;//替换值变量//提取初选点for(i=0;i<height;i++)for(j=0;j<width;j++){if(i==0 || j==0 || i==height-1 || j==width-1)*(newimage+i*width+j)=0;//窗口边缘点置零else{t=*(image+i*width+j);t1=*(image+(i+1)*width+j);t2=*(image+i*width+(j+1));t3=*(image+(i-1)*width+j);t4=*(image+i*width+(j-1));dg[0]=abs(t-t1);//向下的差分绝对值dg[1]=abs(t-t2);//向右的差分绝对值dg[2]=abs(t-t3);//向上的差分绝对值dg[3]=abs(t-t4);//向左的差分绝对值//若四个方向的差分绝对值有任意两个大于阈值,为真,否则为假if( Mid(dg,4,T) )*(newimage+i*width+j)=255;//若为真else*(newimage+i*width+j)=0;//若为假}}float* w=new float[width*height];//存放各点权值的数组int k=3/2;double N[4];//窗口的灰度协方差矩阵double gu,gv;//像素的Robert`s梯度float q;//兴趣值//提取极值点for(i=0;i<height;i++)for(j=0;j<width;j++){*(w+i*width+j)=0.0;//权值数组各元素置零if(*(newimage+i*width+j)!=0){for(l=0;l<4;l++)N[l]=0;//灰度协方差矩阵置零for(m=i-k;m<=i+k-1;m++)for(n=j-k;n<=j+k-1;n++){//该像素的Robert`s梯度gu=*(image+(m+1)*width+(n+1))-*(image+m*width+n);gv=*(image+m*width+(n+1))-*(image+(m+1)*width+n);//计算灰度协方差矩阵N[0]+=pow(gu,2.0);N[1]+=gu*gv;N[2]=N[1];N[3]+=pow(gv,2.0);}q=(float)(4.0*Det(N,4)/pow(Tr(N,2),2.0));//计算兴趣值if(q>Tq)*(w+i*width+j)=(float)( Det(N,4)/Tr(N,2) );//若q大于阈值,计算其权值else*(newimage+i*width+j)=0;}}int w_h,w_w;int x,y;float dmin;int h_l=win_h,w_l=win_w;int h_k=h_l/2,w_k=w_l/2;//局部非最大提取特征点for(i=0;i<height;i+=h_l)for(j=0;j<width;j+=w_l){//控制每次局部非最大的窗口大小if(j+w_l >= width)w_w=width;elsew_w=j+w_l;if(i+h_l >= height)w_h=height;elsew_h=i+h_l;x=i; y=j;dmin=*(w+x*width+y);float temp;//选取权值最大点为特征点,其余点置零for(m=i;m<w_h;m++)for(n=j;n<w_w;n++){if(*(newimage+m*width+n)!=0)*(newimage+m*width+n)=0;temp=*(w+m*width+n);if( temp > dmin ){dmin=temp;x=m;y=n;}}if(*(w+x*width+y)!=0)*(newimage+x*width+y)=255;}delete []w;// return newimage;//返回记录的特征点}四、实验结果与体会结果处理如上图所示。
数字摄影测量实验指导书
《数字摄影测量实验》指导书一、实验目的和任务“数字摄影测量实验”是摄影测量与遥感专业的一门重要专业课。
数字摄影测量实验是一个综合性很强的操作过程,它是对摄影测量课程中所学摄影测量及相关专业的综合应用。
该实验课应用VirtuoZo系统来完成。
通过该实验课了解摄影测量的生产流程,并掌握摄影测量的专业技能(立体观测),制作出符合生产要求的4D 产品:数字高程模型(Digital Elevation Model,缩写DEM);数字正射影像图(Digital Orthophoto Map,缩写DOM);数字线划地图(Digital Elevation Model,缩写DLG);数字栅格地图(Digital Raster Graphic,缩写DRG)。
结合实验,消化和理解课堂所学理论知识,增强学生综合运用所学知识解决实际问题的能力。
二、实验基本要求⒈了解数字摄影测量的生产流程和对数字摄影测量系统的认识,了解VirtuoZo NT系统的运行环境及软件模块的操作特点,了解实验工作流程;⒉掌握内定向、相对定向、绝对定向参数解算,沿核线重采样,为后面的立体量测做好准备工作;⒊熟悉测图、图形编辑;⒋掌握DEM、正射影像图制作。
5. 通过算法实现空间后方交会内容,熟悉Matlab平台,掌握编程语言。
三、计划和安排实验共16学时,8次课。
共包括两个部分内容:一是利用VirtuoZo NT系统实现数字摄影测量过程;二是通过Matlab编程完成一个数字摄影测量实验,如空间后方交会、特征点提取、特征线提取等。
第二部分为辅助内容,在完成第一部分内容后可以选择性完成。
具体安排如下:第一部分:实验一数字摄影测量工作站工作流程介绍(2学时)实验二模型定向参数解算(2学时)实验三影像匹配、匹配编辑(2学时)实验四 DEM获取、拼接(2学时)实验五 DOM获取、拼接(2学时)实验六自动等高线生成(2学时)实验七立体测图(2学时)实验八立体测图(2学时)第二部分辅助内容:实验一熟悉Matlab操作平台,了解基本的编程语句实验二编写代码四、成绩评定⒈实验考勤、纪律与表现(50分);⒉实验报告质量(50分);考核成绩按合格与不合格二级分制评定。
《数字摄影测量》实习指导书word精品文档6页
数字摄影测量实习指导书辽宁工大测绘学院摄影测量与遥感教研室2019年11月目录一、实习目的 (3)二、实习任务和时间安排 (3)三、实习仪器及软件 (3)四、实习内容和方法 (3)(一)摄影测量航片调绘 (3)(二)地形图数字化 (4)五、实习提交成果 (5)六、实习成绩评定 (5)七、实习注意事项 (6)一、实习目的1)、理解航片外业调绘生产流程;2)、掌握地形图数字化方法。
二、实习任务和时间安排1)、每组外业调绘航片一幅;2)、每人利用CASS软件数字化比例尺为1:500栅格图一张;3)(2)、数字化图答疑时间:周二、周四上午三、实习仪器及软件AUTOCAD2019、CASS7.0软件四、实习内容和方法(一)摄影测量航片调绘1)判读利用判读特征、形状、大小、色调、阴影、相关位置及纹理等,了解像片所在的测区地形、地貌情况,可利用室内判读法和室外判读法,熟记判读特征。
要领:a.定好像片方位;b.选立足点;c.由远渐近,由小到大,由易到难;d.边走边判:2)调绘●基本要求a.综合取舍图上所绘地物地貌元素不缺、不漏、不错,做到位置准确、重点突出、主次分明、图面清晰易读。
b.调绘中使用简化符号遵循规范、图式和技术设计的技术要求。
c.补测新增地物●作业过程a.熟悉像片,选野外调绘路线。
b.野外调绘(二)地形图数字化1)CASS7.0界面图1 CASS7.0 界面2)插入图框●图框设置打开CASS 7.0,选择菜单“文件”->“CASS参数配置”,在弹出的CASS7.0参数设置对话框中选择“图框设置”选项卡,根据扫描图廓内容分别填写测绘单位、成图日期、坐标系、高程基准、图式、测量员、绘图员、检查员、密级,如图2。
图2 图框设置●设置比例尺选择菜单“绘图处理”->“改变当前图形比例尺”,在命令行输入新比例尺1:500,如图3。
图3 输入比例尺●插入图框选择菜单“绘图处理”->“标准图幅(50X50cm)”,在弹出的“图幅整饰”对话框中输入相应的图框信息(图名、接图表)和图框左下角坐标(以米为单位),如图4。
数字摄影测量4D产品实习指导书
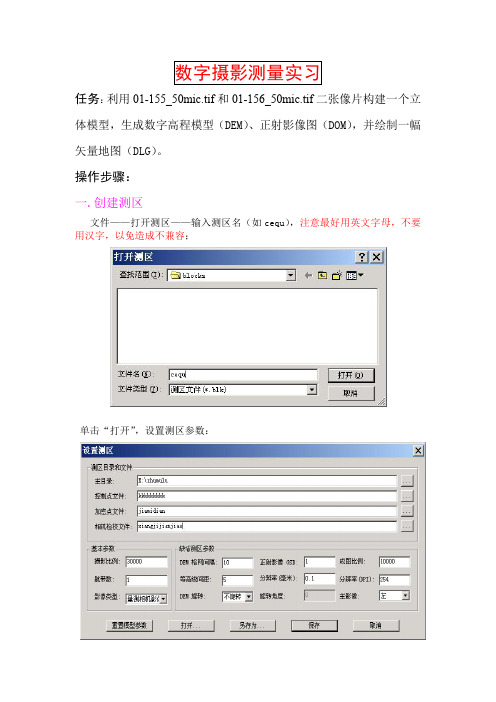
任务:利用01-155_50mic.tif和01-156_50mic.tif二张像片构建一个立体模型,生成数字高程模型(DEM)、正射影像图(DOM),并绘制一幅矢量地图(DLG)。
操作步骤:一.创建测区文件——打开测区——输入测区名(如cequ),注意最好用英文字母,不要用汉字,以免造成不兼容;单击“打开”,设置测区参数:主目录(即放置数据的文件夹)取E:或F:下,控制点文件取名可任意,如kkkkkkkk,但加密点文件、相机检校文件名应写清楚,以便后面查找。
最后,单击“保存”退出界面。
二.引入安装目录下的影像1.单击“文件—引入—影像文件”弹出以下界面,然后将像素大小设为“-1”单击“增加”按钮,添加安装目录“D:Virtuozo—Example—hammer—images 中01-156_50mic.tif和01-155_50mic.tif”两幅影像;然后选择这二个影像文件,单击“选项”,将输出路径改为主目录(E:\zhumulu\images)的images文件夹下,并钩选将“输出路径作用于所有文件”,单击“确定”退出界面。
返回“输入影像”界面,单击“处理”:待影像格式都完成转换为”VZ”类型之后(旁边出现√),单击“退出”,退出“输入影像”界面。
三.设置相机参数单击“设置——相机参数”出现单击该界面下的输入…——打开安装目录(D:Virtuozo—Example—hammer)下的相机参数文件rc30.cmr,点“确定”退出“相机检校参数”界面。
四.设置加密点文件单击“设置——地面控制点…”弹出输入…——打开安装目录D:Virtuozo—Example—hamer文件夹的hamer.grd(注意文件类型先改为所有类型),然后单击“确定”,退出界面。
五.创建模型建立模型0156-0155:①打开“文件——打开/创建一个模型”,输入新模型名,如“0156-0155”②单击“打开”弹出“设置模型参数”界面③点击左右影像旁的模型0156-0155的左影像为01-156_50mic.vz,右影像为01-155_50mic.vz。
如何使用数字摄影测量技术进行摄影测量

如何使用数字摄影测量技术进行摄影测量数字摄影测量技术是现代测绘与地理信息领域的重要工具,它利用数字摄影测量仪和相关软件对物体进行测量和建模。
本文将介绍数字摄影测量技术的基本原理、应用领域和操作步骤,并深入探讨其在地质勘探、城市规划和文化遗产保护等方面的重要性和潜力。
数字摄影测量技术的原理是通过对被摄物体进行数字摄影,获取大量的数码照片,然后利用摄影测量仪和相关软件进行影像匹配和定位,最终得到三维坐标和形状模型等信息。
它的优势在于能够快速获取高精度的空间数据,同时还能提供真实感强的视觉效果。
数字摄影测量技术在各个领域都有广泛的应用。
首先,它在地质勘探中发挥重要作用。
通过对地表进行数字摄影测量,可以获取地表形态、地貌信息以及地质结构等重要数据,有助于矿产资源的勘探和预测。
同时,还能对地质环境的变化进行监测,提供科学依据和数据支持。
其次,数字摄影测量技术在城市规划中也发挥着重要的作用。
通过对城市建筑、道路等进行数字摄影测量,可以获取建筑物的高度、形状、面积等信息,为城市规划提供重要依据。
此外,数字摄影测量技术还能够模拟城市场景,进行可视化分析,为城市规划者提供直观的决策支持。
另外,数字摄影测量技术在文化遗产保护方面也有着重要的应用价值。
通过对文化遗产进行数字摄影测量,可以准确获取文物的形状、尺寸等重要信息,为文物的保护和修复提供科学依据。
此外,还可以对文化遗产进行数字重建,实现虚拟展览和文物保护等目标。
那么,如何使用数字摄影测量技术进行摄影测量呢?下面将介绍一般的操作步骤。
首先,根据需要选择一款合适的数字摄影测量仪,并进行必要的校准和设置。
然后,在拍摄前要做好充分的准备工作,选择合适的天气条件和拍摄角度,保证拍摄质量。
其次,进行实地拍摄。
根据测区的大小和复杂程度,确定拍摄点的数量和位置,并进行拍摄。
在拍摄过程中,要注意保持相机的稳定和一致性,避免产生误差。
拍摄完成后,将拍摄到的照片导入计算机,并使用相应的数字摄影测量软件进行影像匹配和定位。
《摄影测量学》实验指导书(测绘13级)

《摄影测量学基础》实验指导书辽宁工大测绘学院测绘工程教研室2015年9月实验(一) virtuozo工作站认识一.目的要求1)了解数字摄影测量工作站软硬件环境;2)熟悉软件界面及其基本功能。
二.实验地点:数字摄影测量实验室,测绘楼203三.仪器设备:VirtuoZo数字摄影测量工作站四.实验内容数字摄影测量系统的任务是基于数字影像或数字化影像完成摄影测量作业。
VirtuoZo NT系统属世界同类产品的五大名牌之一。
此系统是基于WindowsNT的全数字摄影测量系统,利用数字影像或数字化影像完成摄影测量作业。
由计算机视觉(其核心是影像匹配与影像识别)代替人眼的立体量测与识别,不再需要传统的光机仪器。
从原始资料、中间成果及最后产品等都是以数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息。
VirtuoZo NT不仅在国内已成为各测绘部门从模拟摄影测量走向数字摄影测量更新换代的主要装备,而且也被世界诸多国家和地区所采用。
1)运行环境及配置VirtuoZo NT基于WindowsNT(4.0以上版本)平台运行,基本配置为:Pentium Ⅱ300/128MB RAM/9GBHD/20×CDROM;17寸彩色显示器,1024×768分辨率,刷新频率大于100Hz。
另外还应有数字化影像获取装置(例高精度扫描仪)、成果输出设备以及立体观察装置等附属配置。
其中立体观察装置有偏振光、闪闭式、立体反光镜、互补色(红绿镜)等四种。
2)主要软件模块解算定向参数、自动空中三角测量、核线影像重采样、影像匹配、生成数字高程模型、制作数字正射影像、生成等高线、制作景观图、DEM透视图、等高线叠加正射影像、基于数字影像的机助量测、文字注记、图廓整饰。
3)作业方式自动化与人工干预。
《数字摄影测量》实验报告
《数字摄影测量》实验报告院系:班级:姓名:指导教师:矿业工程学院·测绘工程教研室实验一 DEM制作一、实验目的1.掌握影像匹配原理及过程,掌握DEM数据的生成原理及实现过程2.掌握关键步骤:核线影像重采样,生成核线影像对。
3.了解4d的基本概念,了解VirtuoZo NT系统的运行环境及软件模块的操作特点,了解实习工作流程,从而能对4d产品生产实习有个整体概念。
4. 掌握匹配窗口及间隔的设置,运用匹配模块,完成影像匹配。
掌握匹配后的基本编辑,能根据等视差曲线(立体观察)发现粗差,并对不可靠区域进行编辑,达到最基本要求。
5.通过DEM透视图显示,检查是否有粗差,确定拼接区域的选定及确定拼接产品的路径。
二、实验内容1.模型内定向与核线影像的生成。
2.影像匹配及匹配后的编辑。
3.生成单模型DEM。
4.多模型的DEM拼接。
三、实验方法与步骤1.准备工作1.启动软件,新建工程,对工程进行命名。
2. 参数检查及设置:选择“工程名”节点,在右方的属性窗口设定工程相关参数3. 建立影像列表:新建航带,右击影像节点新建航带即可。
4.添加影像病检查相机反转参数。
5.进行控制点的整理与相机参数文件的设置,用以内定向,并检查是否有误。
二.DEM的制作方法是像片的周边通常有4个或8个经过严格校正并获取精确像片坐标框标点,通过量测这些点的像素坐标,构成一个仿射变换的模型,即可把象素纠正到像片坐标系上。
由于内定向是程序自动化处理,可能略有误差,为了保证内定向的精确,需一个框标一个框标检查并将十字丝编辑到框标的正中心,且误差需在规范要求内。
方法为:先选择框标选择按钮,再在影像工具中将十字丝调整到红色框标中心,为了让十字丝调整更准确,在影像工具窗口中间点击右键可以放大,最好放到1:8倍及以上再调整十字丝,编辑完毕后,需检查误差满足规范要求。
1. 创建立体像对选择“工程”节点,右键菜单选择“创建立体像对”菜单,即可生成立体像对;2.相对定向,概念:通过量取一定数量(最少5个)的相对定向点,解求出相邻相片之间的相对位置关系操作过程:选择需要处理的立体像对,点击相对定向按钮即进入相对定向界面点击按钮,系统可自动做相对定向处理,处理完毕后,属性窗口会列出相对定向点的上下视差,需保证上下视差在规范要求内。
VirtuoZo数字摄影测量实习指导书(土地专用)
《摄影测量与遥感》实习指导书(数字摄影测量部分)中国矿业大学环境与测绘学院二零一零年一月第一章数据处理过程一、整体过程二、数据准备四、定向过程注:图中(以下图相同)虚线框内容表示为可选操作,若用户在做完上步操作时已达到要求时,则可跳过不做虚线框中的操作,直接进入到下步操作。
六、核线采集与匹配七、数字化测图第二章单模型处理操作过程(以VirtuoZoNT 3.7软件为例)一、建立测区和模型,并进行一些相关的设置1、数据准备数据准备包括:控制点分布图,影像,控制点文件,相机参数文件2、新建或打开一个测区首先,我们需要建立一个测区,因为我们以后的工作是在该测区下进行的。
测区就是待处理的航空影像(当然也包括各种卫星影像或近景影像)所对应的地面范围(或区域)。
VirtuoZo主界面中的文件菜单下没有新建菜单项,而是将新建与打开合并为打开测区。
单击打开测区菜单项,系统弹出打开或创建一个测区对话框,如下图所示:单击对话框中的打开,系统弹出设置测区对话框,以设置测区参数,如下图所示:其中,摄影比例:是指摄影比例尺分母,摄影比例尺在航摄时就已确定,由执行航飞任务的单位为您提供,默认为30000。
航带数:测区内航带数目,默认为1条。
影像类型:用于影像的类型选择,VirtuoZo支持量测相机影像、非量测相机影像、卫星影像、IKONOS 影像、QuickBird影像等,请确保测区的影像类型和您即将使用的影像类型一致。
3、引入影像文件在主菜单上单击文件→引入→影像文件菜单项,系统弹出输入影像对话框。
该对话框中的好多参数与测区参数中的值是一致的,在此没必要对其进行修改。
我们只需给定像素大小即可(由扫描仪的参数而定,一般情况下,扫描单位会提供给您具体数值,如果您使用提供的训练数据,请把像素大小设为0.045),如果选为-1,系统将会读出文件内保存的像素大小,并自动填回去。
至于其它的选项,要根据具体情况而定。
比如选中屏蔽警告信息项,则在转换影像的过程中,所有的警告信息和错误提示对话框都不再出现,防止转换过程因等待操作人员确认而停止,转换中发现有问题的文件会有相应标记选中删除原始影像项,转换影像的过程中,系统将会把已经经过转换的原始影像删除,以节省磁盘空间(一旦原始影像被删除,以后想再利用它们就不可能了)。
数字摄影测量学备课教案

一、课程介绍1.1 课程背景数字摄影测量学是一门研究利用数字影像进行物体尺寸测量和形状重建的技术。
随着计算机技术、光学技术和电子技术的飞速发展,数字摄影测量学在工程测量、地理信息系统、遥感监测等领域得到了广泛的应用。
1.2 课程目标通过本课程的学习,使学生掌握数字摄影测量学的基本原理、方法和技术,能够运用数字摄影测量学知识解决实际工程问题。
1.3 教学内容本章主要介绍数字摄影测量学的基本概念、发展历程、基本原理和应用领域。
二、数字摄影测量基本原理2.1 摄影测量学的基本原理介绍摄影测量学的基本原理,包括相似三角形原理、共线方程、共轭原理等。
2.2 数字摄影测量系统介绍数字摄影测量系统的组成、工作原理和主要性能指标,包括相机、图像采集与处理设备、测量软件等。
2.3 数字影像处理与分析介绍数字影像处理与分析的基本方法,包括影像预处理、特征提取、影像分割、形状重建等。
2.4 数字摄影测量参数计算介绍数字摄影测量参数的计算方法,包括内方位参数、外方位参数、三维坐标计算等。
三、数字摄影测量应用3.1 工程测量介绍数字摄影测量在工程测量领域的应用,包括地形测量、建筑测量、道路测量等。
3.2 地理信息系统介绍数字摄影测量在地理信息系统领域的应用,包括数字高程模型、正射影像、三维景观建模等。
3.3 遥感监测介绍数字摄影测量在遥感监测领域的应用,包括资源调查、环境监测、灾害评估等。
3.4 其它应用介绍数字摄影测量在其他领域的应用,如文化艺术、生物医学等。
四、实践操作4.1 数字摄影测量实验设备介绍数字摄影测量实验设备的使用方法,包括相机、图像采集与处理设备等。
4.2 数字摄影测量实验操作讲解数字摄影测量实验的操作步骤,包括影像采集、影像处理与分析、参数计算等。
4.3 实验结果分析与评价分析实验结果,评价实验操作的准确性、可靠性,提出改进措施。
五、课程总结与展望5.1 课程总结总结本课程的主要知识点,加深学生对数字摄影测量学的理解。
数字摄影测量实验教程
数字摄影测量实验教程上机实验指导资源环境综合实验室实验数据:数字化航片:相机文件:控制点文件:控制点校正参照图。
实验一:Virtuo Zo数字摄影测量系统总体操作1 实验目的熟悉Virtuo Zo数字摄影测量系统软件的总体概况,了解其工作原理及其所能满足何种操作需求,。
掌握操作流程及其测区和模型的构建。
2 实验内容Virtuo Zo数字摄影测量系统各个功能菜单的使用方法;如何进行数据准备;重点掌握测区的建立以及模型的建立方法。
3、硬盘目录及测区目录1、硬盘目录结构简图如下:其中,系统目录的内容为:Bin目录:执行程序目录,存放系统的所有可执行程序及框标模板文件。
Virlog目录:存放测区的路径文件(c:\Virlog\Blocks\<测区名>.blk)2、测区目录某测区用户目录(在创建一个新Block时,系统以用户所给的测区名自动产生该测区目录),存放该测区所有参数文件及中间结果、成果等。
Images目录:影像目录,存放VirtuoZo影像文件、影像参数文件、内定向文件、影像外方位元素文件。
模型目录:系统以所给的模型目录名自动建立(如01-156_50mic.tif_01-155_50mic.tif.ste目录),存放该模型所有信息。
Product目录:4D产品目录,存放当前模型所有已生成的产品及输出文件。
TMP目录:核线影像目录,存放当前单模型的核线影像文件。
4 Virtuo Zo数字摄影测量系统工作流程图VirtuoZo的主界面上有十一个菜单项,依次为:文件、设置、空中三角测量、处理、产品、镶嵌、测图、显示、工具、向导和帮助5、建立测区和模型5.1 建立测区1. 新建或打开一个测区测区是待处理的航空影像所对应的地面范围(或区域)。
VirtuoZo 3.7(教学版)主界面中的文件菜单下将新建与打开合并为打开测区。
单击打开测区菜单项,系统弹出打开或创建一个测区对话框。
已存在的测区在列表框中被列出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字摄影测量实验教程上机实验指导摄影测量实验室实验数据:数字航片:相机文件:控制点文件:控制点参照图。
实验一:Virtuo Zo数字摄影测量系统总体操作1 实验目的熟悉Virtuo Zo数字摄影测量系统软件的总体概况,了解其工作原理及其所能满足何种操作需求,。
掌握操作流程及其测区和模型的构建。
2 实验内容Virtuo Zo数字摄影测量系统各个功能菜单的使用方法;如何进行数据准备;重点掌握测区的建立以及模型的建立方法。
3、硬盘目录及测区目录1、硬盘目录结构简图如下:其中,系统目录的内容为:Bin目录:执行程序目录,存放系统的所有可执行程序及框标模板文件。
Virlog目录:存放测区的路径文件(c:\Virlog\Blocks\<测区名>.blk)2、测区目录某测区用户目录(在创建一个新Block时,系统以用户所给的测区名自动产生该测区目录),存放该测区所有参数文件及中间结果、成果等。
Images目录:影像目录,存放VirtuoZo影像文件、影像参数文件、内定向文件、影像外方位元素文件。
模型目录:系统以所给的模型目录名自动建立(如01-156_50mic.tif_01-155_50mic.tif.ste目录),存放该模型所有信息。
Product目录:4D产品目录,存放当前模型所有已生成的产品及输出文件。
TMP目录:核线影像目录,存放当前单模型的核线影像文件。
4 Virtuo Zo数字摄影测量系统工作流程图VirtuoZo的主界面上有十一个菜单项,依次为:文件、设置、空中三角测量、处理、产品、镶嵌、测图、显示、工具、向导和帮助5、建立测区和模型5.1 建立测区1. 新建或打开一个测区测区是待处理的航空影像所对应的地面范围(或区域)。
VirtuoZo 3.7(教学版)主界面中的文件菜单下将新建与打开合并为打开测区。
单击打开测区菜单项,系统弹出打开或创建一个测区对话框。
已存在的测区在列表框中被列出。
若需要新建一个测区时,需在文件名一栏中输入一个测区名。
系统会自动将*.blk文件保存在C:\Virlog-Blocks文件夹下。
请不要更改测区路径,以免以后每次打开该测区时都需查找其路径。
然后单击打开按钮即可。
2. 设置测区参数在测区设置对话框中可以看到,所示的几个编辑框。
针对提供的实习数据参数如下设置:⑴主目录路径选择在控制点文件、加密点文件和相机检校文件所在的文件夹。
⑵控制点文件选择njut.ctl。
(控制点的扩展名为.Pas或.grd或.ctl)⑶加密点文件选择njut.ctl。
注:本实习数据的控制点文件和加密点文件相同。
⑷相机检校文件选择njut.cmr。
(相机的扩展名为.cmr)测区参数对话框⑸摄影比例尺为1:5000。
⑹航带数:1。
⑺影像类型:可量测数码相机。
⑻成果参数按缺省设置。
设置完所有的参数后,单击保存按钮即可。
2 数据准备1. 选择E盘建立自己的学号文件夹,E:\060509001。
将实验数据拷贝到自己的文件夹中。
2. ⑴将资料中影像文件夹中的下列文件拷贝到D:\***\images文件夹中:①528.tif、529.tif、530.tif等3个tif影像文件,②控制文件注:此文件为测区分布及控制点分布文件。
控制点文件数据:9控制点名称 X Y Z911 115531.726000 152322.931000 56.551000912 116067.083000 152415.720000 49.700000913 117288.901000 152786.232000 46.819000921 115343.511000 151493.330000 66.057000922 115987.619000 151216.408000 52.384000923 117128.223000 151032.858000 40.483000931 115373.659000 149671.589000 46.205000 932 116174.660000 149781.520000 39.566000 933 117057.469000 149745.760000 37.435000数码相机文件数据:0.000000 0.12000070.5000001 -33.930000 -33.9300002 -33.930000 33.9300003 33.930000 33.9300004 33.930000 -33.9300003. 将tif 影像文件转换为VirtuoZo系统的格式(.vz格式)。
启动引入影像功能:在主菜单上单击文件→引入→影像文件菜单项:系统弹出输入影像对话框,需改正的参数如下:⑴像素大小(mm):0.006(注意当不知道像素大小时可输入-1)⑵影像类型为量测数码相机⑶加载要引入的影像按增加按钮选择需转化格式的tif影像(可选择多幅影像),按处理按钮将影像格式转换为后缀为.vz 的影像。
注:需要修改输出路径到自己的文件夹中。
3 新建或打开模型打开测区以后就可以打开模型进行作业了。
⑴如果只是打开一个已有的模型,就从列表里选择一个,VirtuoZo就会把它加载入系统。
选择设置菜单下的模型设置可是进行参数设置。
⑵如果要新建一个模型,请输入一个文件名,模型名的取法应使你知道该模型对应哪两张航片,模型名中不能包含空格和反斜杠\,取好模型名以后,用鼠标左键单击打开按钮,系统将弹出设置模型参数对话框。
默认情况下,模型所在的文件夹(模型目录)、模型的临时目录和模型的产品目录已给定,一般不需要改变。
剩下的主要是设定模型使用的两张影像(左影像、右影像)。
手动输入路径或者选择右边的浏览按钮指定文件。
模型的扩展名(.ste格式)查看实验数据的测区情况,相邻两张像片构成一个像对,注意左右航片的顺序。
以上是VirtoZoNT的作业基础,有了测区和模型以后,就可以重构三维信息了。
分别打开测区参数、模型参数、影像参数、相机参数、地面控制点注意:在菜单中分别检测实验数据参数的准确性。
确保数据准确。
这是关键。
6 提交实验报告重点写明数字摄影测量系统的工作流程以及测区及模型的建立方法。
实验二航空影像的内定向、相对定向校正1 实验目的掌握利用数字摄影测量在规定精度要求下对航空影像的内定向、相对定向的原理以及方法,掌握数字影象的校正。
2 实验内容利用给定的实验数据进行内定向、相对定向操作。
并且输出数据精度的质量报告。
3 实验步骤3.1、模型定向一个测区是由多个模型组成,模型定向要逐个进行,每个模型定向的作业流程为:创建新模型→内定向→相对定向→绝对定向,分别解算其定向参数。
创建好了一个单模型以后,就可对它进行定向处理了。
注:在进行定向前,请确认系统当前已经打开测区和模型,并且相机参数文件有效。
㈠模型内定向内定向的步骤(注意:单模型只能处理2张航片)对一个单模型,内定向的步骤主要分:1. 启动内定向模块点击内定向系统将启动内定向模块。
2.数码影像内定向选择添加,确定内定向影像选择模型的左右影像后,点击确定,系统自动内定向。
㈡模型相对定向⒈相对定向界面模型的相对定向主要是通过找同名点,来确定两张影像之间的关系。
模型的相对定向、绝对定向和生成核线影像都可以在相对定向界面下完成,所以可以一直不关闭相对定向模块,完成模型的相对定向、绝对定向和生成核线影像。
系统开始读入模型的左右影像数据,然后显示相对定向窗口。
2. 自动相对定向相对定向提供了一个右键菜单。
选择自动相对定向,程序将自动进行相对定向,寻找左右影像上合适的同名点,自动相对定向完毕,所有找到的同名点均以红色的“+”分别显示在左右影像上。
3. 检查和调整同名点在界面的定向结果窗中显示相对定向的中误差等。
拉动定向结果窗的滚动条可看到所有相对定向点的上下视差。
如某点误差过大,可进行调整,或将该误差过大的点删除或微调。
⑴选中某对同名点时,下面的点位放大窗口会显示出该同名点在左右影像上的图像。
如果点位没有对准相同的地面位置,可以通过点位放大窗口下的按钮进行调整。
选中要微调的点(将光标置于定向结果窗中该点的误差行再击鼠标左键)后,分别选择界面右下方的左影像或右影像按钮,分别点击向上、向下、向左、向右按钮,使左、右影像的十字丝中心位于同一影像点上。
⑵自动相对定向完成后,在定向结果窗口检查同名点的上下视差,如果比较大,就把它删除。
具体操作是用鼠标左键将该点选中,然后再用鼠标左键单击窗口中的删除点按钮,即可将该点删除。
⑶编辑完成后,在影像显示窗口中的任意位置单击鼠标右键,选择弹出的右键菜单中的保存,然后再选择退出。
至此模型相对定向完毕。
5 实验报告提交实验报告:(详细写明操作步骤并提交内定向、相对定向质量报告)实验三航空影响的绝对定向校正1 实验目的掌握利用数字摄影测量在给定的地面控制点的大地坐标对航空影像进行绝对定向的原理以及方法。
掌握绝对定向的操作步骤。
2 实验内容利用给定的实验数据进行绝对定向操作。
并且输出数据精度的质量报告。
3 模型绝对定向绝对定向前,要以手工的方式在当前模型的左右影像上准确的定位一些控制点(单模型至少要四个或四个以上的控制点,本次实习单模型至少需要6个控制点)。
1. 量测控制点打开控制点样片文件,查看测区的控制点分布情况,在航片上点击控制点,会出现放大图像,是量测控制点的依据。
量测控制点是在相对定向的界面下进行的,按右键,在弹出的菜单上选全局显示,在相对定向的界面中出现整张的左\右影像上,参照给出的控制点点位图,寻找相应的控制点,找到后在点位附近点击,系统会弹出一放大的影像的小窗口,在该小窗口中,将光标对准该控制点,单击鼠标左键,程序将自动匹配出右\左影像上的同名点,也以一放大的影像的小窗口显示,同时有一个调整点位的对话框出现右下角。
需对控制点的点位进行精确调整,具体方法是①先选择左影像(或右影像),然后用鼠标左键点击加点对话框中的方向按钮,直到红色十字丝准确对准控制点时为止,再调整右影像(或左影像)。
②输入控制点相应的点号,点击确定保存。
③保存后还可通过界面右下方的来调整坐标,用鼠标左键点击左影像按钮,然后不断的用鼠标左键点击向上、向下、向左或向右按钮,直到红色十字丝准确对准控制点时为止。
相对定向的界面上的控制点颜色为黄色,当前点为绿色,添加完所有的控制点后,就可以进行绝对定向了。
注意:加点时使用的点号应该和控制点文件中的点号要一致。
2. 普通方式的绝对定向绝对定向的方法有两种:普通方式和立体方式。
⑴普通方式的具体操作是在模型的相对定向的界面下单击鼠标右键,在系统弹出的菜单中,用鼠标左键选择绝对定向子菜单中的普通方式,系统弹出调整控制点对话框,绝对定向的结果显示在右边的定向结果一栏中。
当解算出的控制点的大地坐标值的误差过大时,可删除该点,重新量测。