Microscan采集器操作说明书
采集器说明书
ZD1000图书数据采集器说明书目录第一部分采集器的基本使用 (2)1.如何开关机? (2)2.关于充电 (2)3.外接U盘、鼠标、键盘 (2)4.如何在PDA和电脑之间拷贝文件 (3)5.如果使PDA一开机,就自动运行《PDA采集查重盘点系统》? (3)第二部分图解《PDA采集查重盘点系统》 (3)1.功能介面 (3)2.查重采集功能 (4)3.盘点功能 (6)4.休眠 (6)5.退出 (6)6.关于 (6)7.系统设置 (7)8.输入法 (7)第三部分外部软件的使用 (7)DB=》EXCEL、ACCESS (7)EXCEL、ACCESS==》DB (7)MARC文件(.ISO)==》DB (7)第一部分采集器的基本使用1.如何开关机?2.关于充电每次电池电力用完时,请及时充电。
充满需用时大约8小时(或充至PDA右下方的绿色电源指示灯不再闪烁)。
3.外接U盘、鼠标、键盘ZD1000型数据采集器的综合数据线提供了3个USB接口和1个串口,可以同时外接U盘、鼠标和键盘。
接上这些外设后,ZD1000型数据采集器就是一个微型的电脑了,可以使用外接的鼠标来执行移动指针、选择、点击等操作,也可以使用外接的键盘进行打字输入,接入U盘后,在PDA“我的设备”里多了一个“硬盘”。
说明:PDA 内部的盘和外接的盘(U盘)同属闪存盘,保存在这些盘内的数据,不会因为没电而消失。
外接U盘后,在“我的设备”里多了一个“硬盘”图标。
电源指示灯。
4.如何在PDA和电脑之间拷贝文件“复制、粘贴”的操作与普通电脑上的操作是一样的(即在PDA 中选择需复制的文件或文件夹,执行“复制”,然后进入需复制到的目录,执行“粘贴”。
)。
使用外接U盘,可以方便地实现PDA和电脑之间拷贝文件。
5.如果使PDA一开机,就自动运行《PDA采集查重盘点系统》?初次运行《PDA采集查重盘点系统》程序,会自动设置为一开机就自动运行《PDA采集查重盘点系统》。
二代数据采集器使用说明书
二代数据采集器使用说明书一、数据采集器概述数据采集器是以嵌入式技术为基础,基于32位高速ARM微控器和嵌入式实时uC/OS(Linux)操作系统,具有现场采集、数据处理和存储、远程传送、软件在线升级、可控多种外围设备等功能。
它由微处理器主控模块、电源子模块、模拟量采集输入子模块、数据量输入输出子模块、远程通讯子模块和人机界面子模块构成。
提供模拟量输入检测口、继电器触点和TTL电平输出接口、开关量输入接口、RS232/485串行接口、Modem通信接口、以太网接口。
采集器根据程序设置的采集周期采集各通道数据、存储,通过GPRS上传给监控中心站。
采集器本身有汉字LCD菜单,可以通过本地设置采集器各项参数,也可以通过远程设置采集器参数。
从而实现环境污染连续在线监测,实时掌握排污情况,确保及时发现问题,及时处理。
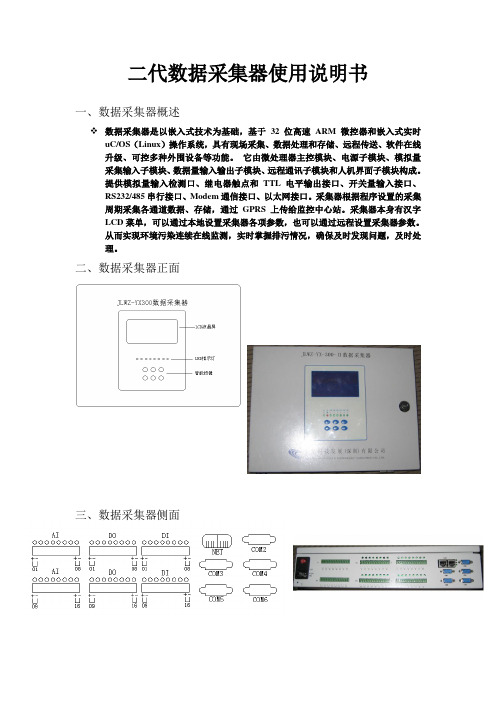
二、数据采集器正面三、数据采集器侧面四、数据采集器内部图主串口1)主控板2)模拟输入板模拟通道JP01~JP16(两脚短路是电流型,断开是电压型)3)串口板数据采集器主要组成部件说明1、模拟板:用于将外围设备输出(4-20mA)的模拟信号转成数字信号。
2、数字输入/输出板:用于数字量输入,及反控设备。
3、串口扩展板:用于连接网络,采集外围设备输出量。
4、主控板:处理外围设备输入数据,并上传给监控中心。
5、按键板:数据采集器设置输入,状态指示。
6、LCD显示屏:用来显示信息7、开关电源:给数据采集器提供稳定电源。
8、蓄电池:在停电状态下给数据采集器供电,起备用电源作用。
五、数据采集器主界面开机工作后,机器工作正常,LCD第一行显示输入密码,第2行显示宇星科技,第3行显示系统的日期和时间,第4行显示监测的实时因子数据。
按任意键LCD屏幕亮后,要求输入密码,输入正确的密码后进入菜单设置。
六、数据采集器密码操作6个智能按键分别为:上“▲”,下“▼”,左“◄”,右“►”,“取消”,和“确认”。
初始普通用户密码为:“▲”,超级密码为“▲▼►▼▲”。
microscan 870中文简明设置
MENELAUS_ZMicroscan QX-870中文简明快速设置针对采集器主要参数详细说明硬件正确连接后,使用Microscan ESP5.0及以上版本设置QX-870相关参数。
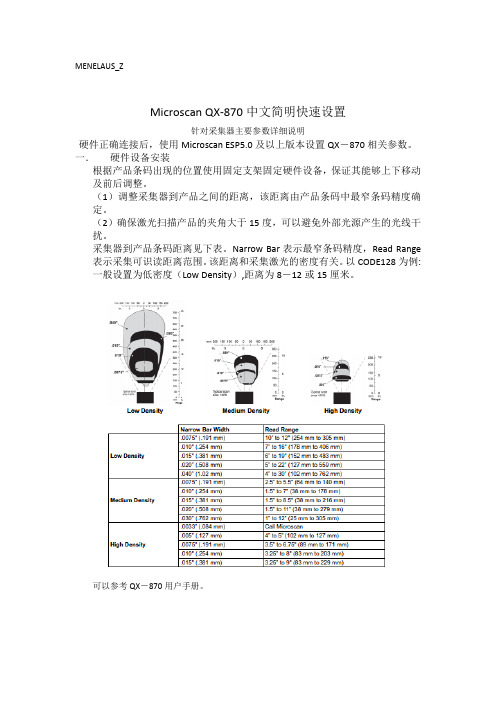
一.硬件设备安装根据产品条码出现的位置使用固定支架固定硬件设备,保证其能够上下移动及前后调整。
(1)调整采集器到产品之间的距离,该距离由产品条码中最窄条码精度确定。
(2)确保激光扫描产品的夹角大于15度,可以避免外部光源产生的光线干扰。
采集器到产品条码距离见下表。
Narrow Bar表示最窄条码精度,Read Range 表示采集可识读距离范围。
该距离和采集激光的密度有关。
以CODE128为例:一般设置为低密度(Low Density),距离为8-12或15厘米。
可以参考QX-870用户手册。
二.ESP调试软件说明。
1.双击“Microsoft ESP”软件,打开软件。
在弹出的硬件设备表中,选择QX-870,点击OK键。
提示是否连接,点击是按键。
下方红色DISCONNECTED表示未连接。
设置硬件所连接的端口及协议,可以不用选择直接点击Auto Connect。
自动连接匹配后提示连接成功。
进入ESP设置界面,下方状态栏显示绿色CONNECTED表未连接成功。
点击左上角App Mode进入菜单设置,并选择第二项Read Cycle。
各项参数说明如下:Multisymbol标签设置Number of Symbols:一次扫描条标签条码的个数。
Multisymbol Separator:指定各标签之间分隔符。
Trigger触发扫描模式Mode:Continuous Read连续读取;Countinous Read 1 Output连续读取只输出1个条码;External Level外部级别模式;External Edge外部边沿模式。
Level和External在读周期开始条件是相同的,但结束时间不一样。
Decodes Before Output输出前的译码Mode:Non-consecutive对识读的条码进行无序计数。
MICROSCANMINIHAWK中文快速设置说明

MICROSCANMINIHAWK中文快速设置说明MICROSCAN _MINIHAWK快速配置文档1.打开软件
2.选择MINI HAWK 点击OK进行下面介面
3.点击“是”进入下面介面
4. 点击“commect”进入下面介面
5.点击“Locate”进入下面介面,用来确定码的位置是否是在采集区内
6.点击“calibrate”采集器进入自动对焦功能
7.完成后,点击“cancel”完成对焦,点击“App mode” 进入下面介面,点击“parameters”进入参数配置
8. 点击“Read Cycle”进入下面介面,对读码数量、码的分隔符、电眼触发方式、电眼触发滤波时间、读码输出周期时间进行设置
9.点击“symblogies”设置要采集码的格式,把不用采集的码关闭掉,这里我们选用的是二维码ECC200
10.点击“I/O ”在下面介面里对I/O参数进行设置,根据需求设置读码后上传码时的时机、LED灯的状态等设置
11.点击“Steup”进入采集器设置调整,对图像的焦距、曝光、码的输出格式等进行设置。
迈思肯(Microscan)2013最新产品手册

精确性 迈思肯产品是高精密仪器。在各种任务中,无论是高速 条码采集,还是利用机器视觉进行高精度导引,定位和 坐标校正,迈思肯的产品都能进行复杂的数据采集,性 能可靠。
联系信息
24
亚太区总部
3 ©2013 Microscan Systems, Inc.
数据采集技术
自动识别和符号体系
线性或一维条形码自20世纪70年代开始就已投入商业使 用,是针对自动识别零件跟踪应用最为广泛的一类符号体 系。如今越来越多的生产商使用二维码,例如Data Matrix 等,二维码可更灵活的进行打码并且具备更大的数据容 量。众多行业明确规定了所必须使用的具体码制并规定了 相关码制质量。
技术先导 迈思肯的技术创新历史非常悠久。我们在20世纪80年代 早期就发明了第一台激光二极管条形码扫描器以及Data Matrix二维码,在自动识别(Auto ID)行业掀起一场 革命。我们凭借高级视觉和光源产品在机器视觉行业遥 遥领先。
如今,迈思肯在机器视觉和自动识别领域不断开发新产 品,仍然是公认的技术领先者。
检测 – 颜色或缺陷检测 – 零部件有/无检测 – 目标定位及引导
测量和校准 – 尺寸测量和级别设定 – 预配置测量,如交叉线或点对点距离
机器手引导 – 输出坐标以引导机器或工具进行精准定位
高速、复杂检测
完整性检查
形状检测
模式比较
测量
6
位置/角度检测
读取OCR
©2013 Microscan Systems, Inc.
数据采集器使用说明书

数据采集器使用说明书一、产品介绍数据采集器是一种用于收集和记录数据的设备。
它可以通过各种传感器收集环境参数、设备状态等各类数据,并将其存储在内部存储器中。
数据采集器具有小巧方便的特点,可广泛用于科学研究、环境监测、农业、工业控制等领域。
二、功能特点1. 多种传感器支持:数据采集器可连接多种类型的传感器,如温度传感器、湿度传感器、压力传感器等,以便采集不同参数的数据。
2. 数据存储:数据采集器内置高容量存储器,可持久存储采集到的数据,以备后续分析和处理。
3. 数据传输:采集器支持多种数据传输方式,如USB、Wi-Fi、蓝牙等,可将采集到的数据传输至外部设备或云平台,方便数据管理和共享。
4. 实时监控:数据采集器配备LCD显示屏,可实时显示采集到的数据,实现数据的即时监控。
5. 多种采集模式:采集器支持自动采集、定时采集、手动采集等多种工作模式,满足不同应用场景的需求。
三、使用说明1. 连接传感器:首先,将数据采集器与传感器进行连接。
根据传感器的接口类型,插入相应的传感器接口。
确保连接牢固,避免松动引起数据采集错误。
2. 开机设置:将数据采集器接入电源,按下电源开关进行开机。
在开机界面,可以进行各项设置,如日期时间设定、采集参数设定等。
按照提示进行操作,并确认设置无误后,保存设置并重启采集器。
3. 选择采集模式:根据实际需求选择采集模式。
若需要实时监控,选择自动采集模式;若需要定时采集,设定采集时间间隔;若需要手动采集,通过按键控制采集动作。
4. 数据传输:一旦采集到数据,可通过USB接口将数据导出到电脑或其他外部设备中。
也可以通过无线传输方式,将数据传输至其他设备或云平台。
操作时,请务必按照相应的传输方式进行操作,确保数据的安全和准确性。
5. 数据管理:为了方便管理和查阅,可以在采集器上设定相关的数据标签,如采集地点、项目名称等。
将数据按照不同标签进行分类存储,方便后续的数据处理和分析。
四、注意事项1. 使用前请阅读使用说明书,确保正确操作。
Omron Microscan QX-1 自动识别系统安装指南说明书
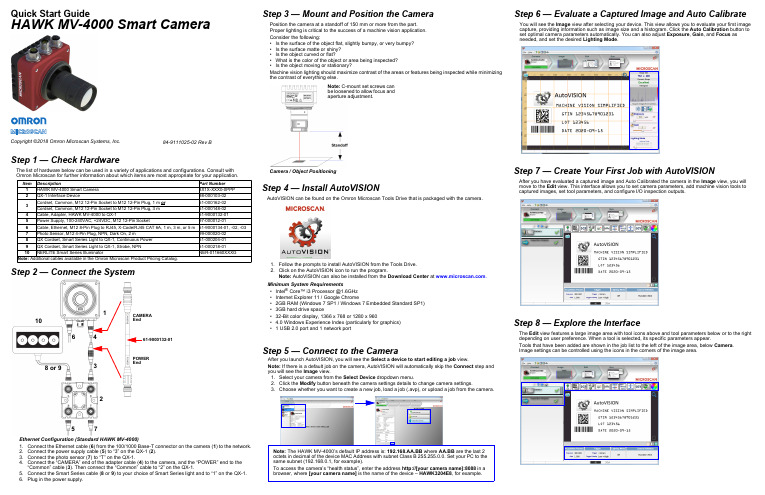
Step 4 — Install AutoVISIONAutoVISION can be found on the Omron Microscan Tools Drive that is packaged with the camera.1.Follow the prompts to install AutoVISION from the Tools Drive.2.Click on the AutoVISION icon to run the program.Note: AutoVISION can also be installed from the Download Center at .Minimum System Requirements•Intel ®Core™******************•Internet Explorer 11 / Google Chrome•2GB RAM (Windows 7 SP1 / Windows 7 Embedded Standard SP1)•3GB hard drive space•32-Bit color display, 1366 x 768 or 1280 x 960• 4.0 Windows Experience Index (particularly for graphics)• 1 USB 2.0 port and 1 network portStep 2 — Connect the System1.Connect the Ethernet cable (6) from the 100/1000 Base-T connector on the camera (1) to the network.2.Connect the power supply cable (5) to “3” on the QX-1 (2).3.Connect the photo sensor (7) to “T” on the QX-1.4.Connect the “CAMERA” end of the adapter cable (4) to the camera, and the “POWER” end to the“Common” cable (3). Then connect the “Common” cable to “2” on the QX-1.5.Connect the Smart Series cable (8 or 9) to your choice of Smart Series light and to “1” on the QX-1.6.Plug in the power supply.Ethernet Configuration (Standard HAWK MV-4000)1017345268 or 961-9000132-01CAMERA EndPOWER EndStep 3 — Mount and Position the CameraPosition the camera at a standoff of 150 mm or more from the part.Proper lighting is critical to the success of a machine vision application. Consider the following:•Is the surface of the object flat, slightly bumpy, or very bumpy?•Is the surface matte or shiny?•Is the object curved or flat?•What is the color of the object or area being inspected?•Is the object moving or stationary?Machine vision lighting should maximize contrast of the areas or features being inspected while minimizing the contrast of everything else.Camera / Object PositioningNote: C-mount set screws can be loosened to allow focus and aperture adjustment.Step 5 — Connect to the CameraAfter you launch AutoVISION, you will see theSelect a device to start editing a job view.Note: If there is a default job on the camera, AutoVISION will automatically skip the Connect step and you will see the Image view.1.Select your camera from the Select Device dropdown menu.2.Click the Modify button beneath the camera settings details to change camera settings.3.Choose whether you want to create a new job, load a job (.avp), or upload a job from the camera.Note: The HAWK MV-4000’s default IP address is: 192.168.AA.BB where AA.BB are the last 2 octets in decimal of the device MAC Address with subnet Class B 255.255.0.0. Set your PC to the same subnet (192.168.0.1, for example).To access the camera’s “health status”, enter the address http://[your camera name]:8088 in a browser, where [your camera name] is the name of the device – HAWK3204E8, for example.Quick Start GuideHAWK MV-4000 Smart Camera84-9111025-02 Rev BStep 1 — Check HardwareThe list of hardware below can be used in a variety of applications and configurations. Consult withStep 6 — Evaluate a Captured Image and Auto CalibrateYou will see the Image view after selecting your device. This view allows you to evaluate your first image capture, providing information such as image size and a histogram. Click the Auto Calibration button to set optimal camera parameters automatically. You can also adjust Exposure ,Gain , and Focus as needed, and set the desired Lighting Mode .Step 7 — Create Your First Job with AutoVISIONAfter you have evaluated a captured image and Auto Calibrated the camera in the Image view, you will move to the Edit view. This interface allows you to set camera parameters, add machine vision tools to captured images, set tool parameters, and configure I/O inspection outputs.Step 8 — Explore the InterfaceThe Edit view features a large image area with tool icons above and tool parameters below or to the right depending on user preference. When a tool is selected, its specific parameters appear.Tools that have been added are shown in the job list to the left of the image area, below Camera . Image settings can be controlled using the icons in the corners of the image area.Power Requirements and Pin AssignmentsHAWK MV-4000 LensesHAWK MV-4000-03, -03C, -13, -13C, -20, -20C, -50, -50COperating Voltage for the HAWK MV-4000 under Testing Conditions 24VRated Current600 mA Operating Voltage Tolerance±10%See the HAWK MV-4000 Smart Camera Guide for full electrical specifications.Standard-Fidelity Lenses for 0.3 Megapixel, 1.3 Megapixel, and 2.0 Megapixel Sensors 98-9000167-01Kit, Lens, C-Mount, F1.2/6 mm, 1.5 MP, 2/3"98-9000168-01Kit, Lens, C-Mount, F1.4/9 mm, 1.5 MP, 2/3"98-9000169-01Kit, Lens, C-Mount, F1.4/12.5 mm, 1.5 MP, 2/3"98-9000170-01Kit, Lens, C-Mount, F1.4/16 mm, 1.5 MP, 2/3"98-9000171-01Kit, Lens, C-Mount, F1.4/25 mm, 1.5 MP, 2/3"98-9000172-01Kit, Lens, C-Mount, F1.6/35 mm, 1.5 MP, 2/3"High-Fidelity Lenses for 0.3 Megapixel, 1.3 Megapixel, and 2.0 Megapixel Sensors98-9000165-01Kit, Lens, C-Mount, F1.6/8 mm, 5 MP, 2/3"98-9000166-01Kit, Lens, C-Mount, F1.6/12 mm, 5 MP, 2/3"98-9000154-01Kit, Lens, C-Mount, F1.6/16 mm, 5 MP, 2/3"98-9000164-01Kit, Lens, C-Mount, F1.6/25 mm, 5 MP, 2/3"98-9000163-01Kit, Lens, C-Mount, F1.9/35 mm, 5 MP, 2/3"98-9000192-01Kit, Lens, C-Mount, F1.9/6 mm, 5 MP, 2/3"High-Fidelity Lenses for 5 Megapixel 1” Sensors98-9000174-01Kit, Lens, C-Mount, F1.4/12.5 mm, 9 MP, 1"98-9000175-01Kit, Lens, C-Mount, F1.4/16 mm, 9 MP, 1"98-9000176-01Kit, Lens, C-Mount, F1.4/25 mm, 9 MP, 1"98-9000177-01Kit, Lens, C-Mount, F1.4/35 mm, 9 MP, 1"See the HAWK MV-4000 Smart Camera Guide for a full list of accessories. All accessories are available in the Omron Microscan Product Pricing Catalog.HAWK MV-4000 Part Number StructureHAWK MV-4000 part numbers follow the format 8ABS-LFFA-LPPP .8 = HAWK MV-4000 Smart Camera (A) Model 0 = No Lens Cover;1 = 50 mm Lens Cover;2 = 70 mm Lens Cover (B) Software 1 = Machine Vision(S) Sensor Type 1 = VGA, Mono; 2 = 1.3 MP, Mono; 3 = 2 MP, Mono; 4 = 5 MP, Mono; 5 = VGA, Color;6 = 1.3 MP, Color;7 = 2 MP, Color;8 =5 MP, Color(L) Lens0 = No Lens; 1 = 2/3” Standard Def.; 2 = 2/3” High Def.; 3 = 1” High Def.(FF) Lens Focal Length 00 = No Lens; XX = Focal Length (mm) (See lens table above.)(A) Accessories 0(L) Lighting(PPP) License100 = AutoVISION Sensor; 101 = AutoVISION; 102 = AutoVISION + Visionscape; 103 = AutoVISION + Verification; 104 =AutoVISION + Visionscape + VerificationDigital I/O and Power Connector – M12 12-Pin SocketVGA/USB Connector M12 12-Pin Plug 10/1000 Base-T Connector M12 8-Pin X-Coded SocketOutput 3Power TriggerInput CommonInput 2Input 3Input 1Output 1GroundOutput 2Output CommonAnalog OutputStep 12 — Run the JobWhen all job parameters are set, click on the Run step at the top of the interface. The software will download the vision job just created to the camera and will begin the inspection . Inspection results and the list of active tools are shown at the right of the image view. That information can also be moved below the image area by clicking the orientation buttons above the inspection results area.Test JobsNote: For descriptions of more advanced functionality, such as setting Inspection Outputs or using the Locate Tool and Decode Tool ’s Dynamic Locate functionality to track multiple tools from image to image, see the help documentation in AutoVISION software .Decode Tool, OCR Tool, Match Strings Tool, String Format ToolMeasure Tool, Count ToolLOT 123456DATE 2020-09-15VISIONSIMPLIFIEDMeasure:Measure the distance betweenthe jaws of the caliper gauges at left.Count:Count the circles on the dice shown at right.Step 9 — Set Camera Parameters1.Click on the Camera box to the left of the image area.2.In the camera parameters below the image area, select the desired type of Trigger , Trigger Polarity ,Photometry (Exposure and Gain), and Lighting .Step 10 — Add Tools to the Job1.Click on the Decode Tool or drag it onto the image area.e the anchor points at the corners of the region of interest to form a box around the Data Matrixsymbol. Leave plenty of space on each side of the symbol.3.Now add a second Decode Tool and do the same for the 1D symbol below the Data Matrix symbol.4.Finally, add an OCR Tool and drag the region of interest around the area of the image where “123456”is printed.Step 11 — Try Out the JobOnce you have configured the tools as desired, use the arrow icons in the Job area to try the job you have just created.Note: Most jobs will inspect multiple captured images. If only one image is being inspected, the effect of the arrow icons will not be evident.Try Out Job Once Try Out Job in LoopCopyright ©2018 Omron Microscan Systems, Inc.。
SICK AG microScan3 - EFI-pro 安全激光扫描仪操作指南说明书

microScan3 – EFI-pro 安全激光扫描仪所述产品microScan3 – EFI-pro制造商SICK AGErwin-Sick-Str.179183 Waldkirch, Germany德国法律信息本文档受版权保护。
其中涉及到的一切权利归西克公司所有。
只允许在版权法的范围内复制本文档的全部或部分内容。
未经西克公司的明确书面许可,不允许对文档进行修改、删减或翻译。
本文档所提及的商标为其各自所有者的资产。
© 西克公司版权所有。
•ODVA 是 ODVA, Inc. 的品牌•EtherNet/IP 是 ODVA, Inc. 的品牌•CIP 是 ODVA, Inc. 的品牌•CIP Safety 是 ODVA, Inc. 的品牌原始文档本文档为西克股份公司的原始文档。
2操作指南 | microScan3 – EFI-pro8021918/1L9Q/2023-08-14 | SICK如有更改,恕不另行通知内容内容1关于本文档的 (8)1.1本文件的功能 (8)1.2适用范围 (8)1.3本操作指南的目标群体 (8)1.4更多信息 (8)1.5图标和文档规范 (9)2安全信息 (10)2.1基本安全提示 (10)2.2规定用途 (11)2.3不当使用 (11)2.4网络安全 (12)2.5合格的安全人员 (12)3产品说明 (13)3.1通过 SICK Product ID 标识产品 (13)3.2设备概览 (13)3.3结构和功能 (14)3.4产品特性 (15)3.4.1变型 (15)3.4.2接口 (16)3.4.3系统插头 (16)3.4.4区域类型 (16)3.4.5区域组 (19)3.4.6监控情况 (20)3.4.7同步监控 (21)3.5应用示例 (22)4项目 (24)4.1机器制造商 (24)4.2机器的运营商 (24)4.3设计 (24)4.3.1防止干扰 (25)4.3.2避免无保护区域 (26)4.3.3安全激光扫描仪的响应时间 (28)4.3.4参考轮廓监控 (28)4.3.5监控情况切换的时间点 (30)4.3.6危险区域保护 (31)4.3.7危险点保护 (37)4.3.8访问保护 (40)4.3.9动态危险区域保护 (42)4.3.10窄巷道中的移动防护 (47)4.4与电气控制系统的连接 (54)4.4.1电磁兼容性 (54)8021918/1L9Q/2023-08-14 | SICK操作指南 | microScan3 – EFI-pro3如有更改,恕不另行通知内容4.4.2电压供给 (55)4.4.3USB 接口 (55)4.4.4控制输入端 (55)4.4.5EFI-pro (56)4.4.6重启联锁 (57)4.5集成到网络 (60)4.5.1网络服务和端口 (60)4.5.2将安全激光扫描仪集成到网络 (60)4.5.3程序集 (61)4.6检查方案 (63)4.6.1调试中和特殊情况下的检查规划 (63)4.6.2定期检查的规划 (64)4.6.3检查提示 (65)5装配 (68)5.1安全性 (68)5.2拆封 (68)5.3安装流程 (68)5.3.1更改系统插件位置 (70)5.3.2直接安装 (71)6电气安装 (73)6.1安全性 (73)6.2接口概览 (73)6.2.1microScan3 – EFI-pro (73)6.3接口配置 (74)6.3.1电压供给 (XD1) (74)6.3.2备用 FE 接口 (74)6.3.3网络,用于 EFI-pro,数据输出,配置和诊断 (XF1,XF2) (74)7系统配置 (76)7.1交货状态 (76)7.2Safety Designer 配置软件 (76)7.2.1安装 Safety Designer (76)7.2.2项目 (76)7.2.3用户界面 (77)7.2.4用户组 (77)7.2.5设定 (79)7.2.6配置 (79)7.2.7联网 (81)7.3概览 (81)7.3.1功能范围 (83)7.4网络设置 (84)7.4.1EFI-pro (84)7.5时间同步 (85)4操作指南 | microScan3 – EFI-pro8021918/1L9Q/2023-08-14 | SICK如有更改,恕不另行通知内容7.6读取配置 (85)7.7识别 (86)7.8协议设置 (87)7.8.1EFI-pro (87)7.9应用 (88)7.10监控平面 (89)7.10.1监控范围的参数 (89)7.10.2安全激光扫描仪的参数 (92)7.11轮廓参考区域 (93)7.12区域 (94)7.12.1使用区域编辑器 (95)7.12.2创建区域组模型 (98)7.12.3导入和导出区域组和区域 (98)7.12.4背景图片 (99)7.12.5区域编辑器的设置 (100)7.12.6借助坐标编辑区域 (100)7.12.7绘入无法监控的区域 (102)7.12.8定义全局几何形状 (102)7.12.9建议区域 (103)7.13输入和输出 (105)7.14监控事件 (107)7.14.1针对监控情况表格的设置 (107)7.14.2多个监控事件表格 (109)7.14.3监控情况设置 (109)7.14.4输入条件 (109)7.14.5关断路径 (109)7.14.6分配区域组 (110)7.14.7分配确定的关断行为 (110)7.14.8导入和导出监控事件表格 (111)7.15模拟 (112)7.16数据输出 (113)7.17传输 (114)7.18启动和停止安全功能 (115)7.19报告 (116)7.20服务 (117)7.20.1设备重启 (117)7.20.2EtherNet/IP (117)7.20.3出厂设置 (117)7.20.4管理密码 (118)7.20.5访问管理 (119)7.20.6光学镜头罩调整 (120)7.20.7比较配置 (120)8调试 (122)8.1安全 (122)8.2校准 (122)8021918/1L9Q/2023-08-14 | SICK操作指南 | microScan3 – EFI-pro5如有更改,恕不另行通知内容8.3接通 (123)8.4在调试和发生变化时检查 (124)9操作 (125)9.1安全性 (125)9.2定期检查 (125)9.3显示元件 (125)9.3.1LED状态 (125)9.3.2网络 LED (126)9.3.3利用显示屏的状态显示 (127)10维护 (131)10.1安全性 (131)10.2定期清洁 (131)10.3更换光学镜头罩 (132)10.4更换安全激光扫描仪 (134)10.4.1更换不带系统插件的安全激光扫描仪 (134)10.4.2完整更换安全激光扫描仪 (135)10.5更换系统插头 (135)10.6定期检查 (136)11故障排除 (137)11.1安全 (137)11.2利用显示屏的详细诊断 (137)11.3显示屏上的故障显示 (138)11.4利用 Safety Designer 诊断 (140)11.4.1数据记录器 (141)11.4.2事件历史 (142)11.4.3消息历史 (144)11.4.4输入/输出状态 (144)12停机 (146)12.1废物处理 (146)13技术数据 (147)13.1变型概览 (147)13.2版本号和功能范围 (147)13.3数据表 (148)13.3.1microScan3 – EFI-pro (148)13.4响应时间 (154)13.5扫描范围 (155)13.6网络中的数据交换 (160)13.6.1程序集 (160)13.7尺寸图 (168)14订购信息 (169)14.1供货范围 (169)6操作指南 | microScan3 – EFI-pro8021918/1L9Q/2023-08-14 | SICK如有更改,恕不另行通知内容14.2订购信息 (169)15备件 (170)15.1不带系统插件的安全激光扫描仪 (170)15.2系统插头 (170)15.3更多备件 (170)16附件 (171)16.1用于碰撞保护的配件 (171)16.2其他配件 (171)17术语表 (172)18附件 (175)18.1合规性和证书 (175)18.1.1符合歐盟聲明 (175)18.1.2符合英國聲明 (175)18.2关于标准的注意事项 (175)18.3初次试运行和试运行核对表 (177)18.4保护设备不受相邻系统影响的安装方式 (177)19图片目录 (181)20表格目录 (183)8021918/1L9Q/2023-08-14 | SICK操作指南 | microScan3 – EFI-pro7如有更改,恕不另行通知1 关于本文档的1关于本文档的1.1本文件的功能本操作指南中包含了安全激光扫描仪生命周期中必需的各项信息。
数据采集器使用说明书
1.概述1.1 引言该数据采集器采用当代微电子技术,对电力设备运行中的数据进行记录、存储、显示。
具有工作可靠、操作简单、数据便于收集和计算机分析等特点。
U盘作为新型移动存储设备,以体积小、速度高、抗震动、通用性强的特点倍受青睐。
该数据采集器可将采集的数据直接存储到普通U盘中。
数据采集完毕后,用户可直接从采集器上取下U盘,利用计算机方便地实现对采集数据的收集和分析处理。
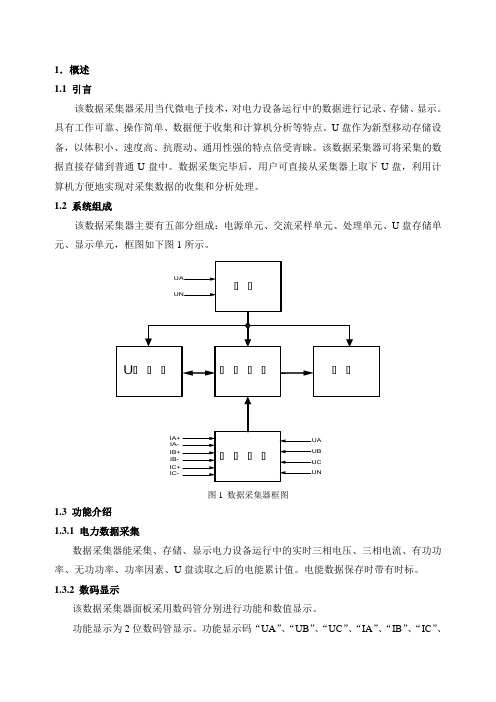
1.2 系统组成该数据采集器主要有五部分组成:电源单元、交流采样单元、处理单元、U盘存储单元、显示单元,框图如下图1所示。
图1 数据采集器框图1.3 功能介绍1.3.1 电力数据采集数据采集器能采集、存储、显示电力设备运行中的实时三相电压、三相电流、有功功率、无功功率、功率因素、U盘读取之后的电能累计值。
电能数据保存时带有时标。
1.3.2 数码显示该数据采集器面板采用数码管分别进行功能和数值显示。
功能显示为2位数码管显示。
功能显示码“UA”、“UB”、“UC”、“IA”、“IB”、“IC”、“pt”、“qt”、“EA”、“PF”分别代表“A相电压”、“B相电压”、“C相电压”、“A相电流”、“B相电流”、“C相电流”、“有功功率”、“无功功率”、“电能”、“功率因素”。
用户可以使用功能按键、增加按键、减少按键使功能显示码循环显示。
数值显示为4位数码管显示。
当电能数值超过4位数时,功能显示码仅用左边的数码管显示为“E”,功能显示码右边的数码管和4位数值显示数码管一起构成5位数码管来显示当前的电能数值。
1.3.3 数据管理和存储数据采集器每隔15分钟将电力运行数据存储在处理单元的控制芯片内部flash里面。
用户定期(建议半个月一次,最长一个月)可以使用U盘对存储数据进行读取,以txt文件形式存储,以当前的月日时分信息进行命名。
读取时,U盘读取指示灯LUSB点亮,读取操作完成后,U盘读取指示灯LUSB熄灭,控制芯片内部flash中数据将被清空。
Microscan采集器操作说明书

Microscan采集器操作说明书Microscan QX-870 中文简明快速设置硬件正确连接后,使用Microscan ESP5.0及以上版本设置QX-870相关参数。
一.硬件设备安装根据产品条码出现的位置使用固定支架固定硬件设备,保证其能够上下移动及前后调整(1)调整采集器到产品之间的距离,该距离由产品条码中最窄条码精度确定。
(2)确保激光扫描产品的夹角大于15度,可以避免外部光源产生的光线干扰。
二. ESP调试软件说明。
1.双击“Microsoft ESP”软件,打开软件。
在弹出的硬件设备表中,选择QX-870,点击OK键。
提示是否连接,点击是按键。
下方红色DISCONNECTED表示未连接。
设置硬件所连接的端口及协议,可以不用选择直接点击Auto Connect.自动连接匹配后提示连接成功。
进入ESP设置界面,下方装讨论显示绿色CONNECTED表示连接成功。
点击左上角App Mode进入菜单设置,并选择第二项Read Cycle.各项参数说明如下:Multisymbol 标签设置Number of Sydbols:一次扫描条码标签的个数。
Multisymbol Separator:指定各标签之间分隔符。
Trigger 触发扫描模式Mode:Continuous Read 连续读取;Countinous Read 1 Output 连续读取只输出1个条码;External Level 外部级别模式;External Edge 外部边沿模式。
Level和External在读取周期开始条件是相同的,但结束时间不一样。
Decodes Bdfore Output 输出前的译码Mode:Non-consecutive 对识读的条码进行无序计数。
Consecutive 对误读的条码进行有序计数。
Number Before Output 设置识读条码输出之前的计数阀值。
End of Read Cycle 结束读周期Mode:Timeout 超时;New Trigger 新触发。
数据采集仪使用说明书
数据采集仪使用说明书一、引言数据采集仪是一种用于收集、存储和分析数据的设备,广泛应用于各个行业的数据采集工作。
本使用说明书将详细介绍数据采集仪的使用方法和注意事项,以确保用户正确、有效地操作设备,提高数据采集的准确性和效率。
二、产品概述1. 产品外观及配件数据采集仪外观美观,整体设计简洁大方。
标配配件包括数据采集仪主机、电源适配器、USB数据线、使用说明书。
2. 技术参数为了更好地了解产品的功能和性能,以下是数据采集仪的一些主要技术参数:- 采集通道数:8个- 采集精度:16位- 采样频率:最高1000Hz- 存储容量:最大支持64GB的SD卡- 数据传输接口:USB、Wi-Fi、蓝牙三、使用方法1. 准备工作在开始使用数据采集仪之前,请确保已经完成以下准备工作:- 将数据采集仪主机连接到电源,并确保电源正常;- 插入SD卡,确保存储容量充足;- 通过USB数据线将数据采集仪与电脑连接。
2. 采集设置- 打开数据采集仪主机,进入菜单界面;- 使用上下方向键选择“采集设置”选项,并按确认键进入;- 针对不同的采集需求,设置采样频率、采集通道数等参数;- 根据需要选择数据采集的时间段或触发条件。
如需设置触发条件,请选择“触发设置”选项。
3. 数据采集- 设置完毕后,按下开始采集按钮,数据采集仪将开始工作;- 在采集过程中,请确保设备平稳放置,避免产生干扰;- 采集完成后,保存数据并关机。
4. 数据导出和分析- 断开数据采集仪与电脑的连接,将SD卡插入读卡器;- 此时,可以使用电脑上的数据处理软件进行数据导出和分析;- 使用分析软件,打开数据文件,进行数据处理、绘图等操作。
四、注意事项1. 使用环境数据采集仪适用于室内和室外环境,但请注意避免潮湿、高温、高压、腐蚀性气体等可能对设备造成损害的环境。
2. 使用方法- 请按照本说明书的步骤正确操作数据采集仪,避免因错误操作导致设备故障或数据丢失;- 在操作过程中,请勿拆卸数据采集仪主机或随意改动设备内部元件;- 避免让数据采集仪与尖锐物品直接接触,以防刮伤设备表面。
Microscan相机设置字符照相命令的步骤
Microscan相机设置字符照相命令的步骤
作者百度文库账号:pw0410410115 2013‐10‐16 保证相机的接线正确,有读写头,电源适配器。
对于相机的读写口的Host接口的九针母头接口,用USB‐RS232九针公头接口(保证电脑上已经装有USB‐RS232的驱动程序且该线缆能够正常使用)与其相接。
或者用该型号相机专用调试线缆(MICROSCAN USB转VGA相机调试通讯线,型号98‐000051‐01)。
而后进行如下操作。
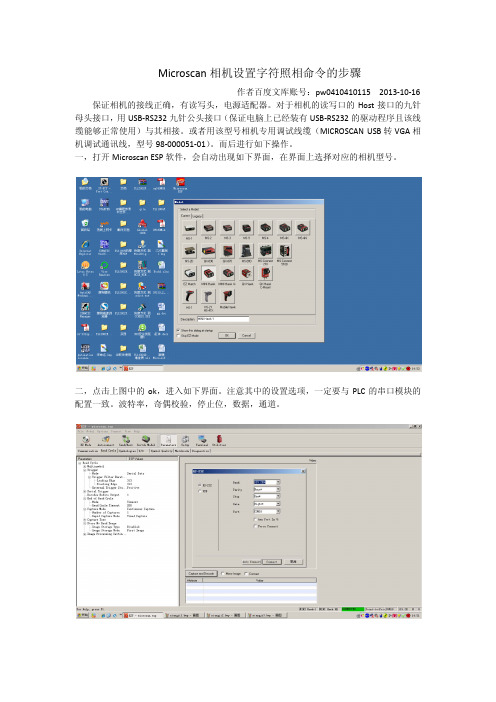
一,打开Microscan ESP软件,会自动出现如下界面,在界面上选择对应的相机型号。
二,点击上图中的ok,进入如下界面。
注意其中的设置选项,一定要与PLC的串口模块的配置一致。
波特率,奇偶校验,停止位,数据,通道。
三,点击上图Auto connect而后点击EZMode的位置,将其切换到如下界面状态。
注意其中的communication选项的设置,一定要与PLC的串口模块的配置一致。
波特率,奇偶校验,停止位,数据。
四,点击上图ReadCycle进入如下界面。
在“Serial Trigger”下的Character(Delimated)下将其修改为T。
T就是触发相机动作的指令。
五,修改后,必须写入并且保存命令,这样最新的命令才能生效。
选择“Send and Save”
六,试发送指令给相机,查看其是否工作。
注意,Send的内容的开头和结尾必须是<和>。
七,试验成功,将程序保存为xxx.esp的文件,以后直接拷贝至其他的相机上进行使用。
Microscan扫枪调试手册

*如果实在无法确认扫码枪所连接的串口号,可
以点击下图中的图标“Autoconnect”依次尝试;
选择对应的串口号,点击 “Connect”;
图5
Process/ Hu Wei
Continental TJ – DQ200 FF IE
Step4 连接成功后的显示画面
在图像中直接 划取取合适的 窗口
不建议将WOI的范围划定过小。我们要为设备或者夹具的震动而导致的2D 码不出现在同一位置而留出一定的富余空间。
定位完成后,必须检查设
! 备的动作时不会与扫码枪
干涉,或引起扫码枪震动
Process/ Hu Wei
Continental TJ – DQ200 FF IE
Step5 定位与校准
5.校准 校准前选取合适的窗口会有利于扫码过程的速度和稳定性 WOI= Windows of Interest
在“setup”下,选择“WOI”;
Step1 接线-调试前需要准备的硬件
15针(母)
Process/ Hu Wei
1.扫码枪 15针(公)
电源接口
2.直流5V电源
9针串口(公)
USB
9针串口(母) 3.扫码器连接线
B转串口线
Continental TJ – DQ200 FF IE
Step1 连接完成后状态
Process/ Hu Wei
Microsca Hu Wei
Continental TJ – DQ200 FF IE
Step3 选择Model
Microscan ESP 软件打开以后的画面如右图 3所示。需要选择待调试扫码枪的型号, Microscan 4008、4002、4112等对应的 Model为“MINI Hawk”。
microscan 中文操作说明.doc

Microscan MiniHawK中文操作说明目录一、软件安装-------------------------------------------------------------------------------------------31、安装环境---------------------------------------------------------------------------------------------------32、安装软件---------------------------------------------------------------------------------------------------3二、硬件安装---------------------------------------------------------------------------------------------41、确定安装高度--------------------------------------------------------------------------------------------42、确定倾斜角度--------------------------------------------------------------------------------------------4三、电气接线-------------------------------------------------------------------------------------------4四、参数设置---------------------------------------------------------------------------------------------51、打开软件进行联机-------------------------------------------------------------------------------------52、调试设备、设置参数----------------------------------------------------------------------------------5 (1)确定码的位置----------------------------------------------------------------------------------------5 (2)调整焦距---------------------------------------------------------------------------------------------6 (3)参数设置---------------------------------------------------------------------------------------------6 (4)将参数发送给采集器------------------------------------------------------------------------------9 (5)恢复出厂设置---------------------------------------------------------------------------------------10 (6)参数保存--------------------------------------------------------------------------------------------101、安装环境在安装软件之前需要先安装软件的环境。
便携式数据采集器使用操作规程
便携式数据采集器使用操作规程
一、开机/关机
按住此键即可。
二、进入溯源系统
三、职责选择
选择。
四、防疫登记
要进行的操作。
(一)耳标佩戴
实际需要进行如下操作: 1. 若不立即注射疫苗,
2.
次号----
(二)防疫登记
依次填写界面信息
1款所述),点击
注:“耳标号”的输入方式有:
(三)耳标补戴
(四)耳标的注销
五、产地检疫
(一)获取动物防疫信息
“耳标号”的获取:1.可读卡,选择对应的耳标号;2.可扫苗相应的牲畜耳标。
),
(二)出据“产地检疫证明”
1.在;
2.
3.
疫合格证明”。
六、动物出县境检疫
(一)获取动物产地检疫或防疫信息
1.可扫苗产地检疫证明二维码,
2.可逐个扫苗耳标,
3.读取“流通卡”获得)。
(二)动物防疫信息的核定
弹出
(三)出具“出县境动物检疫合格证明”
动物防疫或检疫信息核定后,
依次填写完界面信息后,
七、出具“动物及动物产品运载工具消毒证明”
八、证章作废
选择要进行的操作,依次填写完界面信息后,。
便携式红外通信数据采集器使用说明

便携式红外通信数据采集器使用说明简介便携式红外通信数据采集器是一种用于采集红外通信数据的便携设备。
它可以通过红外信号接收头,收集红外设备发出的信号,并将信号转换为数字数据进行存储和分析。
本文档将介绍便携式红外通信数据采集器的基本功能、使用步骤和注意事项。
功能特点•便携小巧,易于携带和使用;•支持红外信号接收头,可采集多种红外设备发出的信号;•将采集的红外信号转换为数字数据,方便存储和分析;•支持USB接口,可与电脑连接进行数据传输和管理;•内置电池,可独立使用,无需外接电源。
使用步骤1.连接红外信号接收头:将红外信号接收头插入便携式红外通信数据采集器的红外接收口。
2.打开便携式红外通信数据采集器:长按电源键,待指示灯亮起后松开。
3.选择采集模式:便携式红外通信数据采集器支持实时采集和定时采集两种模式。
按下模式切换键可在两种模式之间进行切换。
–实时采集模式:在此模式下,数据采集器将立即开始采集红外信号,并将采集的数据实时显示在屏幕上。
–定时采集模式:在此模式下,数据采集器将在预定的时间段内定时采集红外信号,并将数据存储在内部存储器中。
4.开始采集红外信号:按下开始采集键,数据采集器将开始采集红外信号。
在实时采集模式下,数据将实时显示在屏幕上;在定时采集模式下,数据将存储在内部存储器中。
5.停止采集红外信号:按下停止采集键,数据采集器将停止采集红外信号。
6.传输数据到电脑:将便携式红外通信数据采集器通过USB接口连接到电脑上。
电脑将自动识别设备并打开存储器中的数据文件。
用户可以通过电脑对采集的数据进行管理和分析。
注意事项•在使用便携式红外通信数据采集器前,请确保已经正确连接红外信号接收头,并选择了正确的采集模式。
•在长时间不使用便携式红外通信数据采集器时,建议关闭电源以节省电池电量。
•在使用便携式红外通信数据采集器时,请避免将其暴露在高温、潮湿或尘土较多的环境中,以免造成设备损坏。
•请勿随意拆解或更换便携式红外通信数据采集器的内部组件,如需维修,请联系售后服务。
Microscan Systems, Inc. 产品说明说明书

Hardware RequiredConfigurationsItem DescriptionPart Number 1MicroHAWK ID-20, MicroHAWK ID-30, or MicroHAWK ID-407ABX-YZZZ-LPPP 2Cable, USB A to Micro B, 6 ft., ID-2061-9000034-013Cable, USB A to Micro B, 3 ft., ID-2061-9000045-014Cable, DB15 to BUS Power USB Type A, ID-3061-9000043-015Kit, Cable, DB15 to Ext. Power/RS-232 with Power Supply, ID-30 – includes 97-9000006-01 and 61-9000037-01 98-9000048-016Power Supply, 5V – for use with cables 61-9000037-01 and 61-9000038-0197-9000006-017Cable, DB15 to Ext. Power/RS-232, ID-3061-9000037-018Kit, Cable, DB15 to Ext. Power/USB with Power Supply, ID-30 – includes 97-9000006-01 and 61-9000038-0198-9000049-019Cable, DB15 to Ext. Power/USB, ID-3061-9000038-0110Kit, Cable, DB15 to Ext. Power/USB, I/O with Power Supply, ID-30 – includes 97-000011-02 and 61-9000039-0198-9000050-0111Power Supply, 100-240VAC, +5VDC, 2-Pin U.S./Euro Plug 97-000011-0212Cable, DB15 to Ext. Power/USB, I/O, ID-3061-9000039-0113Power Supply, 100-240VAC, +24VDC, TRK 3-Pin, U.S./Euro Plug 97-000012-0214IB-131 Interface Box99-000018-0115Converter, IC-332, 24V/5V, Opto I/O – for use with IB-131FIS-0001-0035G 16Cable, Communication, DB25 Plug to DB9 Socket, 6 ft.61-3000026-0317Photo Sensor, Visible, NPN, Light On, 5VDC 99-000019-0118Cable, DB15 to USB/RS-232, Triggered, ID-3061-9000102-0119Power Supply, 100-240VAC, +24VDC, M12 12-Pin Socket 97-000012-0120QX-1 Interface Device98-000103-0221Cordset, Common, M12 12-Pin Socket (Screw-On) to M12 12-Pin Plug 61-000162-0222Cordset, Host, Ethernet, M12 8-Pin Plug (Screw-On) to RJ45, 1 m.61-000160-0323Photo Sensor, M12 4-Pin Plug, NPN, Dark Off, 2 m.99-000020-0124Photo Sensor, M12 4-Pin Plug, NPN, Dark On, 2 m.99-000020-0225Cable, M12 12-Pin Socket to 9-Pin Socket and M12 Plug61-9000054-0126Cable, M12 12-Pin Socket to USB Keyboard Wedge and M12 Plug61-9000088-01MicroHAWK ® ID-20 / ID-30 / ID-40Configuration GuideUSB Type A PlugMicroHAWK ID-20 with Micro-USB Type B to USB Type AMicroHAWK ID-30 with DB15 to BUS Power USB Type A1MicroHAWK ID-30 with DB15 to Ext. Power/USB Type ATo HostMicro-USB Type B Plug2 or 31Integrated Corner-Exit CableAccessory USB Cable to Host4To HostTo HostIntegrated Corner-Exit Cable1Accessory USB Cable to HostPower Supply69Note: BUS-powered cable delivers reduced illumination – approximately 30% less brightness.MicroHAWK ID-30 with DB15 to Ext. Power/RS-232MicroHAWK ID-30 with DB15 to Ext. Power/USB, I/OMicroHAWK ID-30 with IB-131 and IC-332To power supplyIC-332IB-131To external trigger1111516141317Power SupplyTo hostIntegrated Corner-Exit Cable67To TriggerAccessory USB Cable to HostIntegrated Corner-Exit CableTo Power Supply12MicroHAWK ID-30 with DB15 to USB/RS-232, TriggeredTo Host118To Host (USB)To TriggerTo Power Supply (11)To Host (RS-232)Integrated Corner-Exit CableAccessory USB Cable to HostMicroHAWK ID-40 with QX-1 Interface Device12122201922 or 23Common (12-Pin Plug to 12-Pin Socket)To Host (Ethernet 8-Pin Plug to RJ45)QX-1To TriggerTo Power SupplyMicroHAWK ID-40 M12 12-Pin Socket to 9-Pin Socket and M12 PlugMicroHAWK ID-40 with M12 12-Pin Socket to USB Keyboard Wedge and M12 Plug112526To Power Supply (19) or: Flying Lead Cable (61-000167-02); QX-1; MS-Connect 210.To Host (USB)To Host (RS-232)To Power Supply (19) or: Flying Lead Cable (61-000167-02); QX-1; MS-Connect 210.To EthernetTo EthernetPower Requirements and Pin AssignmentsTX (+)RX (–)RX (+)TX (–)V+V–M12 8-Pin Socket (Ethernet)V+V–MicroHAWK ID-20: 5VDC ± 5%; 350mA at 5VDC (typ.) MicroHAWK ID-30: 5V ± 5%; 600mA at 5VDC (typ.)MicroHAWK ID-40: 4.75V – 30V; 150mA at 24VDC (typ.)Important: See the MicroHAWK ID-20 / ID-30 / ID-40 User Manual for information about Microscan’s Isolation Mounting Kit (P/N 98-9000064-01)to eliminate ground loops or other external electrical noise through your MicroHAWK ID-30 or ID-40 reader.MicroHAWK ID-20 Micro-USB Type B SocketPin Function 1Vbus (5V)2D–3D+4N/C 5GroundMicroHAWK ID-30 High-Density 15-Pin Dsub USB/Serial SocketPin Function 1+5VDC 2TX2323RX2324GND 5D+6N/C7Output 1+8Default+9Trigger+10D–11Output 3+12Input+ (New Master+)13Chassis 14Output 2+15VbusNote: An accessory cable is required between the ID-30’s 15-pin corner-exit cable and the host’s USB port.MicroHAWK ID-40 M12 ConnectorsGround Output 3Output 1Output 2New Master DefaultPowerInput CommonOutput CommonRS-232 (Host) RxDTriggerRS-232 (Host) TxD M12 12-Pin Plug+10-28VTriggerGround Trigger/New Master / Input 1 CommonQX-1 Interface Device – for use with the MicroHAWK ID-40 (Top View)QX-1 Trigger Connector (T) 4-pin SocketConnector T on the QX-1 Interface Device is the trigger connector.Connectors 1, 2, and 3 can be used to bus power and data as required by the application.PTMicroHAWK ID AccessoriesMicroHAWK ID-30 Connectivity Kits98-9000048-01Kit, Cable, DB15 to Ext. Power/RS-232 with Power Supply, ID-30 – includes 97-9000006-01 and 61-9000037-01 98-9000049-01Kit, Cable, DB15 to Ext. Power/USB with Power Supply, ID-30 – includes 97-9000006-01 and 61-9000038-0198-9000050-01Kit, Cable, DB15 to Ext. Power/USB, I/O with Power Supply, ID-30 – includes 97-000011-02 and 61-9000039-01 Recommended items (not included with kit):•99-000019-01, Visible, NPN, Light On, 5VDC•61-000151-01, Flying Lead CableMicroHAWK Power Supplies97-9000006-01Power Supply, 5V – for use with cables 61-9000037-01 and 61-9000038-01 97-000011-02Power Supply, 100-240VAC, +5VDC, 2-Pin U.S./Euro Plug97-000012-01Power Supply, 100-240VAC, +24VDC, TRK 3-Pin, U.S./Euro Plug MicroHAWK Cables61-9000034-01Cable, USB A to Micro B, 6 ft., ID-2061-9000045-01Cable, USB A to Micro B, 3 ft., ID-2061-9000037-01Cable, DB15 to Ext. Power/RS-232, ID-3061-9000038-01Cable, DB15 to Ext. Power/USB, ID-3061-9000039-01Cable, DB15 to Ext. Power/USB, I/O, ID-3061-9000043-01Cable, DB15 to BUS Power USB, ID-3061-9000102-01Cable, DB15 to USB/RS-232 Triggered, ID-3061-9000054-01Cable, M12 12-Pin Socket to 9-Pin Socket and M12 Plug61-9000088-01Cable, M12 12-Pin Socket to USB Keyboard Wedge and M12 Plug MicroHAWK Mounting Accessories98-9000034-01Kit, Adapter, MS-4 to ID-2098-9000041-01Kit, L-Bracket, MicroHAWK98-9000047-01Kit, 1/4-20 Camera Mount, MicroHAWK98-9000052-01Kit, Mounting Stand, Ram, MS-3, MS-4, MINI, MicroHAWK, 4"98-9000053-01Kit, Mounting Stand, Ram, MS-3, MS-4, MINI, MicroHAWK, 3"98-9000054-01Kit, Mounting, APG, MS-4, MINI, MicroHAWK98-9000059-01Kit, Adapter Plate, MS-4, MINI to MicroHAWKOther Accessories98-9000043-01Kit, Diffuser, MicroHAWK ID-30/ID-4098-9000044-01Kit, Polarizer, MicroHAWK ID-30/ID-4098-9000045-01Kit, Red LED, MicroHAWK ID-30/ID-4098-9000046-02Kit, White LED, MicroHAWK ID-30/ID-4098-9000051-01Kit, Window, MicroHAWK ID-30/ID-4098-9000057-01Kit, Right-Angle Mirror, MicroHAWK ID-2098-9000058-01Kit, Right-Angle Mirror, MicroHAWK ID-30/ID-4098-9000064-01Kit, Isolation Mounting, M3, MicroHAWK ID-30/ID-40MicroHAWK ID Part Number StructureMicroHAWK ID part numbers follow the format 7ABX-YZZZ-LPPP.7 = MicroHAWK.Example Part Number: 7312-2000-1005Description: MicroHAWK ID-30, Auto ID, IP54 Enclosure, 5V, USB, SXGA 1.2 Megapixel, Mono, High Density, Autofocus, Red Outer LEDs, High Speed X-Mode Decoder.(A) Model1: Engine, No Case, USB2: ID-20, IP40 Case, USB3: ID-30, IP54 Case, 5V, USB4: ID-40, IP65 Case, 24V, Ethernet(B) Software1: Auto ID(X) Sensor1: WVGA 0.3 Megapixel, Mono2: SXGA, 1.2 Megapixel, Mono3: QSXGA, 5 Megapixel, Color(Y) Optics0: Custom1: Standard Density2: High Density(ZZZ) Focus Distance000: Autofocus050: 50 mm = 1.96 in.064: 64 mm = 2.51 in.081: 81 mm = 3.18 in.102: 102 mm = 4.02 in.133: 133 mm = 5.23 in.190: 190 mm = 7.48 in.300: 300 mm = 11.81 in.(L) Outer LED Color0: N/A (Engine and ID-20)1: Red2: White(PPP) Speed and Decoder000: Standard Speed, 1D Decoder001: High Speed, 1D Decoder002: Standard Speed, 1D/2D Decoder003: Standard Speed, X-Mode Decoder004: High Speed, 1D/2D Decoder005: High Speed, X-Mode DecoderNotes:•(A) Model: The MicroHAWK Engine is available for OEM-certified partners only.•(L) Outer LED Color: Outer LEDs provide extra illumination. Base level illumination included with all readers.•(PPP) Speed and Decoder: 1D omnidirectional decoding functionality is included with all readers. The 1D/2D Decoder option is useful for printed labels. X-Mode is the full decoder package for 1D, 2D, DPM, and damaged symbols.•Field Upgrades: Not available for optics or illumination due to factory settings for optical alignment, LED balancing, and sealing for IP enclosure rating. However, the reader’s speed and decoder version are field-upgradeable via licenses.。
工业条码数据采集器--(MS820)使用手册

工业条码数据采集器—MS820使用说明江苏瑞德2010.11.22目录一、设备介绍 (3)1、MS-820简介 (3)二、参数设置 (4)1、设备连接 (4)2、参数调整 (7)3、扫描测试 (11)三、性能调试 (13)1、扫描最佳位置调整 (13)一、设备介绍1、MS-820简介Microscan MS-820工业型高速激光条码阅读器,以其性能、多功能性和耐用性而著称,对任何打算自动化或增强条形码跟踪的行业都具有普遍的吸引力。
MS-820条码阅读器的读取密度可以从3Mil到30Mil的条形码不等,这种能力使其在高速、固定架的工业条码阅读器类型中占据领导地位。
运用先进的解码、光学、和仿真处理技术,MS-820条码阅读器能解码其扫描速度范围内的高密度标签。
Microscan MS-820条码阅读器参数扫描光源:650纳米,可视半导体激光二极管扫描速度:350-1100次/秒支持条码:AIAG、Code39、Codabar、交叉25码、UCC/EAN-128、Code128、Code93和PDF417物理特性尺寸:长109mm×宽95mm×高45mm重量:0.212kg电源:DC10-28V支持接口:RS-232 RS-422/485工作环境操作温度:0℃- 50℃储藏温度:-50℃- 75℃操作湿度:0% - 90% 非冷凝状态下二、参数设置1、设备连接双击MircoScan扫描头参数设定软件“ESP”,进入设备选择界面。
选择所要设置的扫描设备,MS-820。
如图:软件自动提示是否连接MS-820,选择“是”,如图:开始连接扫描设备。
软件下方会有滚动条提示连接进度,完成后状态栏变绿,并显示“CONNECTED”,即完成设备连接,可以开始设置参数。
2、参数调整单击“App Mode”,进入应用模式,设置参数。
如下图:Communication:连接设置此页面用于设置MS-820的连接参数:Baud Rate: 9600Parity: Even (奇校验)Stop Bits: One (1位)Data Bits: Seven (7位)Host Protocol: Point-to-Point (点对点模式)Host 422 Status: Disabled (关闭)Read Cycle:读取设置此页面用于设置MS-820读取条码时的相关参数:MultiSymbolNumber of Symbols: 10 (每次读取10个条码信息) MultiSymbol separator: ; (每个条码信息之间的分隔符) TriggerMode: (读取信号模式)[Continue Read]: 常读模式[Continue Read 1 Output]: 常读,有一输出即返回[External Level]: 高低电平触发模式[External Edge]: 高低电平边缘触发模式[Serial Data]: 串口命令模式[Serial Data and Trigger]: 串口命令+新的触发信号When to Filter: After Trigger (信号后过滤) External Trigger State: Active Closed (激活时关闭) Serial Trigger: <A> (串口信号<A>命令)End of Read CycleMode: TimeOut (超时模式)Read Cycle TimeOut: 100 (超时1秒)Laser SetupLaser on/off: Enabled (启用激光开关)Laser Framing Status: Disabled (关闭激光定制状态) Laser on Poision: 20 (接通位置)Laser off Poision: 80 (断开位置) Symbologies:条码设置此页面用于设置MS-820读取码制以及输出信息的相关参数:1D Symbologies (一维条码)Code 128: Enabled (启用code128码制)Fixed Symbol Length Status: Enable (固定条码长度)Symbol Length: 20 (20位条码长度)EAN Status: Disabled (EAN模式状态)Output Format: Standard (标准输出)Application Record Separator Status: Disabled (应用记录分隔符状态) Application Record Separator Character: ; (应用记录分隔符) Application Record Brackets: Disabled (应用记录括号)Application Record Padding: Disabled (应用记录填充)Save To Reader:发送并保存设置完参数后需将这些参数发送至扫描器,Save to Reader—Send and Save。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Microscan QX-870 中文简明快速设置
硬件正确连接后,使用Microscan ESP5.0及以上版本设置QX-870相关参数。
一.硬件设备安装
根据产品条码出现的位置使用固定支架固定硬件设备,保证其能够上下移动及前后调整
(1)调整采集器到产品之间的距离,该距离由产品条码中最窄条码精度确定。
(2)确保激光扫描产品的夹角大于15度,可以避免外部光源产生的光线干扰。
二. ESP调试软件说明。
1.双击“Microsoft ESP”软件,打开软件。
在弹出的硬件设备表中,选择QX-870,点击OK键。
提示是否连接,点击是按键。
下方红色DISCONNECTED表示未连接。
设置硬件所连接的端口及协议,可以不用选择直接点击Auto Connect.
自动连接匹配后提示连接成功。
进入ESP设置界面,下方装讨论显示绿色CONNECTED表示连接成功。
点击左上角App Mode进入菜单设置,并选择第二项Read Cycle.
各项参数说明如下:
Multisymbol 标签设置
Number of Sydbols:一次扫描条码标签的个数。
Multisymbol Separator:指定各标签之间分隔符。
Trigger 触发扫描模式
Mode:Continuous Read 连续读取;Countinous Read 1 Output 连续读取只输出1个条码;External Level 外部级别模式;External Edge 外部边沿模式。
Level和External在读取周期开始条件是相同的,但结束时间不一样。
Decodes Bdfore Output 输出前的译码
Mode:Non-consecutive 对识读的条码进行无序计数。
Consecutive 对误读的条码进行有序计数。
Number Before Output 设置识读条码输出之前的计数阀值。
End of Read Cycle 结束读周期
Mode:Timeout 超时;New Trigger 新触发。
Read Cycle Timeout 读取周期超时。
指定识读条码时间,超过时长后停止译码。
Reader setup 采集器设置
Gain Level:增益级别。
电流的补偿阀值,当AGC为关闭状态时,该值可以通过使用自动校准功能时自动设置。
一般可设为80左右。
Tracking:识读轨迹。
该值可微调激光识读条码时的阀值。
当自动校准后,仍未获取到较好的采集效果,可以微调该值。
一般可设为75左右。
以上两值都是对自动调准后起微调作用,在实际应用中非常重要。
可以获得较明显效果。
Scan Speed 扫描速度:通过旋转镜的转速设置每秒扫描的次数,一般设为1000。
在Test模式下,将被转换成识读的百分比。
Laster Setup 激光的设置
Laser On/off:激光是否在扫描时可见。
可见enable。
Laser Framing Status:激光桢开关
Laser On/off position:激光长度的起始位置和终止位置。
Raster Setup 光栅光域的设置
内容同上。
选择Symbologies分页栏设置条码类型
Code128:标签条码类型为128码,选择Both Standard or Edge。
选择I/O分页栏设置输入输出状态参数
Symbol Data Output 标签数据输出:Good Read 成功读取When to Output Sysmbol Data 输出时机:As soon As Possible 尽可能及时的输出
No Read Message 对未成功读取的标签设置:Enable 打开。
Message 输出字符串信息:NOREAD 一个NOREAD字符串。
Output Flash Mode 绿色闪光模式;On Good Read 对于成
功读取的标签采集器发出绿色光。
Green Flash Duration 绿色闪烁持续时间;50 即500毫秒。
Beeper蜂鸣器:Disabled关闭采集器蜂鸣器。
Commnunications采集器通讯端口设置
采集器通过串口与pc终端连接,使用RS232-C接口标准。
通讯协议包括:Baud Rate 波特率9600,Parity奇偶校验位0,Stop Bits 停止位1,Data Bits数据位8。
RS232A与RS232B同时打开Enabled。
见右图所示,指令与符号数据同时双向传递。
采集器端通信协议参数值应与PC 终端串口通信协议参数值一致,否则PC应用层软件无法获取Symbol Data 信息。
以上参数进行修改后,须进行保存并发送参数至采集器,操作如下:
点击Send/Recv图标,选择并点击‘Save to Reader’后,在点击‘Send and Save’可将修改参数保存发送至采集器。
选择Setup项对激光设置,该项是对Laser和Raster设置及调试的一个窗口。
各参数意义
Test:标签识读测试,以百分比的形式表示。
Calibrate:自动校准功能。
将贴有标签的产品放到指定位置,点击Calibrate采集器将自动校准Laser和Raster的各值。
Framing Select:激光桢选择。
点击Laser Frame或Raster Frame可以分别校准激光束和激光栅的值。
Top Offest 和 Bottom起始偏移量和终止偏移量;指定激光栅Raster的光域范围。
Sweep 扫描摆动速度:Raster 激光栅扫描速度。
Static Lir:静态激光
自动校准或修改值后,点击SAVE保存!。