基于多旋翼无人机平台的便携式空中训练模拟器设计
《飞行控制技术综合实践》多旋翼高级阶段HIL仿真实验
《飞行控制技术综合实践》多旋翼高级阶段HIL仿真实验课程名称:飞行控制技术综合实践实验项目名称:多旋翼高级阶段HIL仿真一、Rflysim仿真平台介绍RflySim采用基于模型设计(Model-Based Design,MBD)的思想,可用于无人系统的控制和安全测试。
因MATLAB/Simulink支持MBD的整个设计阶段,所以选择它们作为控制/视觉/集群算法开发的核心编程平台;同时,因Python是免费的且有丰富的视觉处理库,支持它作为顶层视觉与集群算法开发。
除了MATLAB/Simulink 和Python,RflySim还有其他开源的软件和工具,也包括为此专门设计的软件和工具。
1.RflySim是一套专门为教育和研究打造的基于Pixhawk /PX4 和MA TLAB/Simulink的快速开发平台。
2.基于Windows平台,一键安装。
3.采用基于模型的开发理念,应用软件在环(SIL)和硬件在环(HIL)仿真加速开发过程。
4.RflySim允许开发者无需接触C++,而是直接使用MATLAB/Simulink设计底层控制器(如姿态控制器和位置控制器)和顶层应用(如顶层决策和自主飞行),并直接将其部署到多旋翼自驾仪上。
5.可以很方便的修改多旋翼模型的参数来适配你自己的多旋翼飞行器进而采用SIL和HIL验证控制算法。
二、Rflysim仿真平台(1)Rflysim环境配置1.获取安装包,从官方途径获取最新.iso的镜像,用Windows资源管理器来加载镜像2. 启用WSL子系统功能:开启WSL子系统功能:双击“0.UbuntuWSL\ En ableWSL.bat”脚本(先关闭杀毒软件以免拦截),在“用户账户控制”窗口点击“是”,即可自动开启WSL子系统。
电脑首次执行本命令,需要在弹出窗口中输入“Y”来确认并重启电脑。
3. 一键安装脚本:点击MATLAB的“浏览文件夹”按钮,定位到刚才加载iso镜像得到文件夹,鼠标右键OnekeyScript.p ,点击“运行”按钮(或在窗口输入OnekeyScript 命令)4. 推荐安装配置-首次运行(2)单机控制接口实现1.Pixhawk固件还原(需联网)方法如下:1)打开QGC地面站软件,断开Pixhawk;2)如下图所示,点击工具栏齿轮图标进入载具设置页面,再点击“Firmware”(固件)标签进入固件烧录页面;3)用USB 线连接Pixhawk 自驾仪到电脑,此时软件会自动识别Pixhawk 硬件,如下图所示所示,在界面右侧弹出固件配置窗口,勾选第一项“PX4 ***”,然后点击“确定”,QGC 开始自动下载(需联网,无法联网请参考下一页使用本地固件)并安装最新的PX4 固件到Pixhawk中;2.Pixhawk硬件在环仿真模式4•完成固件烧录后,自驾仪会自动重启并连接到QGC上;此时,如右图所示,进入“Airframe(机架)”标签页,选择机架类型为“HILQuadcopterX”,然后点击右上角的“ApplyandRestart”(应用并重启)按钮,此时自驾仪会自动重启;•重启后QGC会自动寻找串口并连接到Pixhawk,此时查看各个配置页,确保Pixhawk进入硬件在环仿真模式。
无人机多旋翼实训报告
一、实训背景随着科技的不断发展,无人机技术日益成熟,应用领域不断拓展。
为了培养我国无人机领域的人才,提高无人机操作技能,我们开展了多旋翼无人机实训课程。
本次实训旨在让学生了解多旋翼无人机的基本原理、结构、组装、调试以及飞行操作,提高学生的实际操作能力。
二、实训内容1. 多旋翼无人机基本原理和结构(1)基本原理:多旋翼无人机通过多个电机和螺旋桨的组合产生升力,实现空中飞行。
飞行控制系统根据传感器获取的数据,计算出无人机的飞行轨迹和姿态控制指令,通过执行机构控制无人机的飞行。
(2)结构:多旋翼无人机主要由机体、电机、螺旋桨、电池、飞控系统、传感器等组成。
机体提供结构支撑,电机和螺旋桨产生升力,电池为无人机提供动力,飞控系统负责飞行控制,传感器用于获取无人机飞行状态信息。
2. 多旋翼无人机组装与调试(1)组装:根据多旋翼无人机说明书,将机体、电机、螺旋桨、电池、飞控系统、传感器等部件组装在一起。
组装过程中,注意各部件的连接顺序和紧固程度。
(2)调试:完成组装后,对无人机进行调试,包括电机平衡、飞控系统校准、传感器校准等。
调试过程中,注意观察无人机各项参数是否正常。
3. 多旋翼无人机飞行操作(1)起飞:将无人机放置在平稳的地面,打开遥控器,启动无人机,待无人机稳定后,逐渐升高,直至达到所需高度。
(2)悬停:在指定高度悬停,调整无人机的俯仰、滚转和偏航,使无人机保持稳定。
(3)前进、后退、左转、右转:通过遥控器控制无人机的电机转速,实现前进、后退、左转、右转等动作。
(4)上升、下降:通过遥控器控制无人机的电机转速,实现上升、下降等动作。
(5)降落:降低无人机的飞行高度,直至平稳降落。
4. 多旋翼无人机自主飞行(1)航线规划:使用地面站软件,规划无人机的飞行航线。
(2)自主飞行:将无人机设置为自主飞行模式,无人机将按照预设航线飞行。
(3)返航:在飞行过程中,若出现异常情况,无人机将自动返航。
三、实训心得1. 通过本次实训,我对多旋翼无人机的原理、结构、组装、调试以及飞行操作有了更深入的了解。
无人机技术基础与技能训练课件:无人机飞行训练

5
无人机飞行训练 多旋翼无人机模拟飞行训练
6.不要动遥控器的摇杆,继续点击Skip。 7. 点击完成,如图。这一步完成后,遥控器的校准已经完成。
6
无人机飞行训练 多旋翼无人机模拟飞行训练
多旋翼无人机模拟软件使用 (1)选多旋翼模型 (2)设设置风速风向等值 (3)设置各通道的控制功能 (4)设置好后,开始飞行
固定翼无人机模拟软件使用 (1)选择固定翼模型 (2)设置风速 (3)设置通道 (4)模拟飞行 设置好后,开始飞行。
17
无人机飞行训练
固定翼无人机模拟飞行训练
固定翼无人机模拟飞行基本动作 (1)起飞 要求:选择适当的位置,配合速度使用升降舵沿45度方向向上爬升; 起飞角度不宜过大,也不宜过小。 (2)降落 要求:操控者转动头部来看着飞机从而操控飞机降落;降落滑行的接 触地面应在操控者的前方,再从这一点进入滑行状态; (3)矩形航线 要求:进入矩形航线的第一边直线要与跑道中心线平行;转弯角度为 90度且要平和转弯;矩形航线四边等高,飞行方向不变化。 (4)水平8字 要求:确定8字航线起始航点;从起始航点开始直线飞行至8字航线一 端转弯点开始飞行。
18
无人机飞行训练 固定翼无人机场外飞行训练
起飞/降落 方法:起飞时无人机逆风从起飞线开始柔和地加速直线滑跑,柔和离 地,小角度爬升至一定安全高度后再进行后续的巡航动作飞行。 要求:起飞前一定要确认风向,应正向逆风起飞;降落时也要正向逆 风降落。
19
无人机飞行训练 固定翼无人机场外飞行训练
矩形航线 方法:逆风飞行进入跑道上空,等高矩形航线第一边,然后分别在相 应位置作90度转弯,完成1个封闭的水平矩形航线。 要求:第一边直线要与跑道轴线平行;90度转弯时要保持柔和;矩形 航线4边同等高度,每边飞行要保持直线。
训练型飞行模拟器系统设计及仿真研究
3、仿真引擎:仿真引擎是实现飞行仿真的关键部分,包括气象仿真、地理 仿真、控制仿真等多个部分。需根据实际需求,选择合适的仿真引擎,确保其能 够真实地模拟出各种飞行环境和条件。
二、训练型飞行模拟器系统仿真 研究
仿真研究是训练型飞行模拟器的关键部分,包括建模仿真、数据采集与分析 等方面。
1、建模仿真:采用数学模型和计算机技术,对真实飞行环境进行模拟。包 括空气动力学模型、控制模型等,需确保其准确性和稳定性。
参考内容
引言
战斗机飞行模拟器视景系统仿真研究具有重要的现实意义和实际应用价值。 这种研究不仅有助于提高飞行员的训练质量和效率,还可以为飞行器的设计和改 进提供有力的支持。本次演示将详细介绍战斗机飞行模拟器视景系统仿真的概念、 意义、目前存在的问题,并在此基础上提出本次演示的研究内容和方法。
研究背景
谢谢观看
然而,尽管本次演示在飞行模拟器视景仿真系统设计和关键技术研究方面取 得了一些进展,但仍存在一些需要进一步探讨的问题。例如,如何进一步提高场 景模型的精度和细节,如何应对更加复杂的飞行场景和应急情况,以及如何评估 飞行模拟器的真实感和有效性等方面的问题。因此,我们将在未来的研究中继续 这些领域,不断优化飞行模拟器视景仿真系统设计和关键技术,为飞行员培训和 其他相关领域提供更加真实、高效的仿真体验。
关键技术
本节将介绍飞行模拟器视景仿真系统中需要重点解决的关键技术。首先,在 场景构建技术方面,采用高精度3D建模算法和贴图技术,提高场景模型的质量和 细节;其次,在实时图像渲染技术方面,研究GPU加速技术,优化渲染流程,提 高渲染质量和效率;最后,在生理仿真技术方面,引入多传感器融合技术,模拟 出更加真实的视觉、听觉和力觉体验,提高飞行模拟的真实感。
引言
基于PID控制的多用途无人机模拟器的设计
技术方案Technology Scheme数据通信2020.616基于PID控制的多用途无人机模拟器的设计白金凤金正焕金湜(韩国世明大学信息通信学院世明大学27136)摘要:目前的无人机模拟器是在无人机重量确定的情况下设计的,很容易地检验其飞行稳定性或控制功能。
但是无人机主要分为两种类型:重量固定型和重量可变型。
重量固定型无人机在飞行期间重量固定,例如竞赛用无人机或无人机上搭载重量固定的摄像头。
重量可变型无人机在飞行期间尽管机身重量固定,但是无人机上搭载的重量是变化的,例如用于喷洒农药的无人机。
本文设计了基于PID控制的多用途无人机模拟器,既可以对重量固定型无人机进行设定,也可以对重量可变型无人机进行设定。
首先在Simulink平台上建立模型,通过改变无人机的重量进行实验,然后在Cleanflight平台上进行实验,并与重量固定型无人机进行了比较。
实验结果表明,重量可变型无人机在飞行的稳定性和控制方面均达到了最优状态。
关键词:多用途无人机;模拟器;Simulink0引言无人机是随着通信技术的发展而发展起来的。
无人机灵活性高,应用于侦察、跟踪和定位等[1]。
目前设定无人机的代表性模拟软件是Cleanflight和Betaflight,可以对重量固定的无人机进行优化,但是当用途改变时,需更换电子调速器和电机,然后再根据配件重新设定。
对于重量可变型无人机却不可设定[2]。
农业用无人机在农药喷洒前、中、后过程中的重量一直变化,设置非常复杂。
因此,本论文设计了基于PID控制的多用途无人机模拟器,通过动力学方程及无人机重量分析电机的最佳性能,既可以对重量固定型无人机进行设定,也可以对重量可变型无人机进行设定。
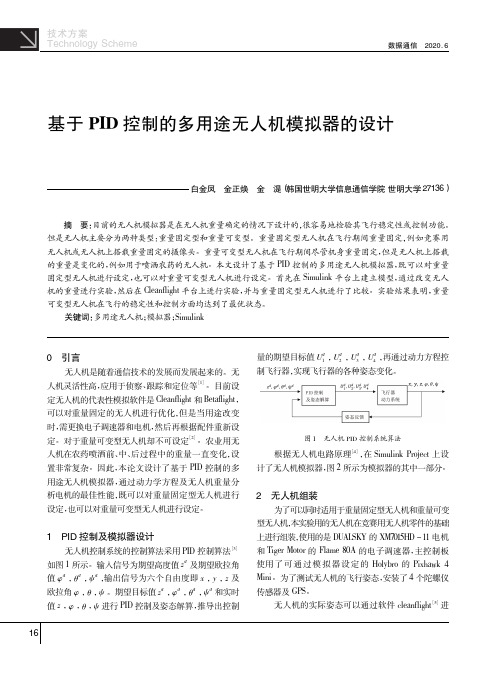
1PID控制及模拟器设计无人机控制系统的控制算法采用PID控制算法[3]如图1所示。
输入信号为期望高度值z d及期望欧拉角值φd,θd,ψd,输出信号为六个自由度即x,y,z及欧拉角φ,θ,ψ。
期望目标值z d,φd,θd,ψd和实时值z,φ,θ,ψ进行PID控制及姿态解算,推导出控制量的期望目标值U d1,U d2,U d3,U d4,再通过动力方程控制飞行器,实现飞行器的各种姿态变化。
无人机(多旋翼)组装与调试技术 2.1 凤凰模拟飞行软件(实操)

教案
主要内容
一、导入
模拟飞行是成为无人机驾驶员的入门训练,通过模拟飞行训练,既可以有效地降低训练成本,又可以快速地提升无人机驾驶的能力。
模拟飞行是依托计算机硬件和软件技术,应用互联网、局域网环境,近似于真实无人机的仿真飞行操作技术的训练。
二、内容
1.模拟飞行的优势
1)所使用的器材是普通的计算机及模拟器,降低了无人机的炸机频率,具有良好的经济性。
2)在基础训练方面,无人机模拟飞行与无人机真实飞行具有融通性。
3)高度仿真及互动性强,使模拟飞行具有实用性和应用性。
4)时间上灵活,不受设备、天气、场地和管理上的限制,在家里也可以练习。
5)没有电量限制,可以长时间进行练习。
6)通过规范的无人机模拟飞行,可以非常快地适应无人机真实飞行培训。
2.视频分享
凤凰模拟飞行软件。
基于虚拟现实技术的无人机模拟训练系统设计
基于虚拟现实技术的无人机模拟训练系统设计随着无人机技术的飞速发展,无人机的应用范围越来越广泛。
然而,无人机的操作和训练受到很大的限制,实地训练成本高昂,训练时间不灵活。
基于虚拟现实技术的无人机模拟训练系统应运而生,为无人机操作员提供了全新的训练方式。
本文将介绍基于虚拟现实技术的无人机模拟训练系统的设计。
首先,无人机模拟训练系统的设计需要具备高度逼真的虚拟环境。
通过使用三维建模技术,可以将真实世界中的各种环境元素进行精细地模拟,包括地形、建筑物、天气等。
通过运用高质量的图形渲染技术,使得模拟环境能够真实地反映无人机在不同场景下的飞行状况。
此外,虚拟环境还可以根据操作员的需求进行定制,以满足不同的训练目标。
其次,无人机模拟训练系统的设计需要提供真实的无人机操作体验。
通过配备专门设计的操纵设备,操作员可以模拟真实的控制操作,如操纵杆、按钮等。
操纵设备应具备高度灵敏的响应能力,可以准确地捕捉到操作员的动作,并将其实时反馈到模拟环境中。
在虚拟环境中,操作员可以通过操纵设备来控制无人机的起飞、降落、悬停、航线规划等各种操作,从而提升其操作技能。
此外,无人机模拟训练系统的设计应该提供多种训练场景和任务模式。
在虚拟环境中,可以根据实际需求进行不同的训练设置。
例如,可以设计不同的天气条件,如晴天、阴天、雨天等,以模拟不同环境下的飞行挑战。
同时,系统还可以提供多种任务模式,如巡航、搜索救援、物资运输等,以满足不同操作员的训练需求。
通过这种灵活的设计,可以有效提升操作员在各种场景下的应对能力和决策能力。
另外,无人机模拟训练系统的设计应该提供实时的反馈和评估机制。
在训练过程中,系统应该能够实时监测和记录操作员的操作行为,并提供相应的反馈信息。
例如,系统可以根据操作员的操纵技术、操作准确度、任务完成时间等指标进行评估,并及时提供相应的建议和改进意见。
通过这种反馈和评估机制,可以帮助操作员快速发现和纠正操纵问题,提高操作技能和安全性。
无人机模拟操控技术 常规旋翼模拟飞行
6.2常规旋翼模拟飞行6.2.1 常规旋翼模拟调试配置新遥控器后,无需在进行新的遥控器配置。
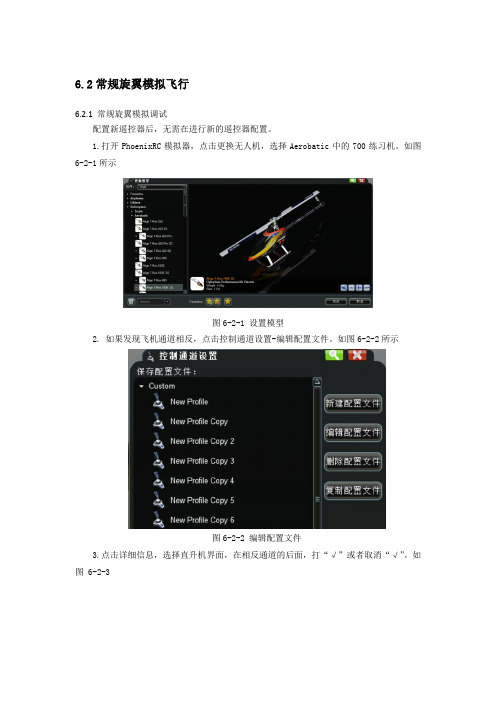
1.打开PhoenixRC模拟器,点击更换无人机,选择Aerobatic中的700练习机。
如图6-2-1所示图6-2-1 设置模型2. 如果发现飞机通道相反,点击控制通道设置-编辑配置文件。
如图6-2-2所示图6-2-2 编辑配置文件3.点击详细信息,选择直升机界面,在相反通道的后面,打“√”或者取消“√”。
如图 6-2-3图6-2-3 控制通道4.点击完成,准备起飞。
6.2.2 基础飞行1.起飞与降落旋翼机头向前从场地中央柔和起飞至目视高度飞行 10-20秒后,旋翼柔和下降着陆于场地中央 3 平方米范围内。
如图6-2-4所示图6-2-4起飞与降落2.悬停旋翼机头向前于起降区起飞,垂直匀速上升至2米高度悬停不少于4秒,旋翼垂直匀速下降着陆于起降区。
如图6-2-5所示如图6-2-5悬停3.四位悬停旋翼机头向前于起降区起飞,垂直匀速上升至2米高度悬停2秒,机体向任意方向依次做4个90°缓慢自转并在每个90°位置悬停2秒以上;旋翼垂直匀速下降着陆于起降区。
如图6-2-6所示图6-2-6 四位悬停4.水平位移旋翼机头向前于起降区起飞,垂直匀速上升至2米高度悬停2秒,旋翼右水平匀速移动至1号(或2号)旗上空悬停至少2秒,旋翼反向水平匀速移动至2号或(或1号)旗上空悬停至少2秒,旋翼反向水平匀速移动至起降区上空悬停至少2秒,旋翼垂直匀速下降着陆于起降区。
如图6-2-7所示图6-2-7 水平位移6.2.3 航线飞行1.垂直矩形带180°自转旋翼机头向左(或右)于起降区起飞,垂直匀速上升至2米高度悬停2秒,水平后退飞行至1号(或2号)旗上空悬停2秒,垂直上升同步做180°自转至7米高度悬停2秒,水平后退飞行至2号(或1号)旗上空7米高度悬停2秒,旋翼降同步做180°自转至2米高度悬停2秒,旋翼退飞行至起降区上空2米高度悬停2秒,垂直匀速下降着陆于起降区。
无人机训练模拟器设计

总第171期2008年第9期舰船电子工程Ship Electronic Enginee ring Vol.28No.943 无人机训练模拟器设计3叶晓慧 王 波(海军工程大学 武汉 430033)摘 要 无人机装备部队后,必须通过大量的飞行训练才能使其形成一定的战斗力。
依靠真实无人机进行训练虽然训练效果好,但费用高、风险大。
使用无人机模拟器可完成无人机的各种训练操作程序,既满足训练要求,又节约训练费用、降低风险。
通过设计一种无人机训练模拟器,介绍模拟器的组成和原理,对构成模拟器的各个组成模块的功能进行了详细的阐述。
关键词 无人机;模拟器;仿真中图分类号 V279Design of Un m anned Aerial Vehicle Tr aini ng Si mulatorYe Xia ohui W ang Bo(Naval Univer sity of Engineering ,Wuha n 430033)Abs tra ct A great deal of training must be d one to for m ba ttle effectivene ss after UAV (Unmanned Aerial Ve hicle)is fitted out t he ar my.Wit h real UAV ,a better t raining eff ect will be ac hieved ,but which is high expenditure a nd risk.It can comple te diffe rent opera tio nal procedures by using UAV t raining simulator ,which not only can satis f y tr aining requirement s ,but can save cost and reduce risk.An UAV simula tor is designe d in t his paper.The constit ution and p rinciple of simulato r is int roduced ,and the function of each module in the syste m is pre sented in detail.Ke y w ords UAV ,simulator ,emulation Class N umber V2791 引言自海湾战争以来,无人机在战场上的成功运用使其受到各国军方的重视,目前从事无人机研究和生产的国家多达三十多个[1]。
基于Unity3D的多旋翼飞行器模拟训练系统设计
DOI: 10.11991/yykj.202102002基于Unity3D 的多旋翼飞行器模拟训练系统设计马忠丽,吴丽丽,李嘉迪,曾玥涵,赵俊楠成都信息工程大学 控制工程学院,四川 成都 610225摘 要:为帮助不同层次多旋翼飞行器爱好者更好地掌握飞行器飞行控制技巧,利用Unity3D 设计开发一套多旋翼飞行器飞行训练仿真系统,系统包含技能训练、挑战训练和考级训练3种训练模块。
首先构建不同训练模式下的虚拟运动场景,然后通过重力与惯性模拟、碰撞和边界检测以及飞行视角切换等手段,完成飞行器虚拟物理系统的设计,最后在建立微型四旋翼、四旋翼、八旋翼3类多旋翼飞行器3D 模型基础上,设置键盘和遥控器2种外部输入设备,模拟飞行器升降、俯仰、偏航飞行运行姿态及姿态变化等功能,实现仿真运动控制功能。
测试结果表明该系统能很好地满足多旋翼飞行器飞行训练要求。
关键词:多旋翼;Unity3D ;虚拟现实;训练系统;运动场景;物理系统;仿真运动;人机交互中图分类号:V279+.2;TP391.9 文献标志码:A 文章编号:1009−671X(2021)03−0111−07Design of simulation training system for multi-rotor aircraftbased on Unity3DMA Zhongli, WU Lili, LI Jiadi, ZENG Yuehan, ZHAO JunnanSchool of Control Engineering, Chengdu University of Information Technology, Chengdu 610225, ChinaAbstract : In order to help different levels of multi-rotor aircraft enthusiasts better grasp the flight control skills of aircraft, a multi-rotor aircraft simulation flight training system was designed and developed by Unity3D. The system includes three training modules: skill training, challenge training and grade examination training. Firstly, the virtual motion scenes under different training modes are constructed, and then the virtual physical system of the aircraft is designed by means of gravity and inertia simulation, collision and boundary detection, and flight angle switching.Finally, based on three kinds of 3D models of multi-rotor aircraft, including micro four-rotor, four-rotor and eight-rotor,two external input devices with keyboard or remote control, are set up. In addition, the flight attitude and attitude changes of the aircraft are simulated, realizing the motion control function. The test results show that the system can meet the requirements of multi-rotor aircraft flight training.Keywords: multi-rotor; unity3D; virtual reality; training system; motion scene; physical system; simulation motion;human-computer interaction在越来越多领域得到广泛应用的基于Unity3D (U3D)开发的虚拟仿真系统为学习者提供了丰富的学习环境和条件。
无人机飞行姿态模拟器设计
无人机飞行姿态模拟器设计董成举;杨剑锋;李小兵;潘广泽;袁泽谭;严拴航【期刊名称】《自动化与信息工程》【年(卷),期】2018(039)001【摘要】在对无人机等设备开展环境及可靠性试验时,为模拟其飞行姿态设计了一种无人机飞行姿态模拟器(二维转台).首先,介绍了飞行姿态模拟器的关键零部件选型;然后,为使飞行姿态模拟器满足无人机相关试验要求,通过有限单元法对其进行静力学分析及模态分析,并研究转动零部件的等效建模方法;最后,计算结果显示:飞行姿态模拟器在重力作用下的最大变形量为0.298 mm,整体结构的基频为16.6 Hz,模态振型为绕底座轴扭转.仿真结果表明:飞行姿态模拟器设计合理,能满足试验需求.【总页数】7页(P17-22,31)【作者】董成举;杨剑锋;李小兵;潘广泽;袁泽谭;严拴航【作者单位】工业和信息化部电子第五研究所;广东省无人机可靠性与安全性工程技术研究中心;广东省工业机器人可靠性工程实验室;工业和信息化部电子第五研究所;广东省无人机可靠性与安全性工程技术研究中心;广东省工业机器人可靠性工程实验室;工业和信息化部电子第五研究所;广东省电子信息产品可靠性技术重点实验室;广东省工业机器人可靠性工程实验室;工业和信息化部电子第五研究所;广东省无人机可靠性与安全性工程技术研究中心;广东省工业机器人可靠性工程实验室;航空工业第一飞机设计研究院;航空工业第一飞机设计研究院【正文语种】中文【相关文献】1.面向环境适应性的无人机飞行姿态r模拟器设计与仿真 [J], 杨剑锋;黄创绵;李小兵;潘广泽;闫攀峰;袁婷2.二自由度飞行姿态模拟器自整定控制器设计 [J], 尹航;杨烨峰;赵岩;梁悦;班晓军3.基于STM32的飞行姿态运动模拟器设计 [J], 于秀萍;吕淑平;刘涛;张耀坤4.PILCO框架对飞行姿态模拟器系统的参数设计与优化 [J], 杨烨峰; 邓凯; 左英琦; 班晓军; 黄显林5.固定翼无人机飞行姿态检测和控制设计 [J], 成志勇因版权原因,仅展示原文概要,查看原文内容请购买。
无人机模拟训练系统设计与开发
无人机模拟训练系统设计与开发矫永康;陈勇;于进勇【摘要】针对无人机实装训练的不足及模拟训练系统设计的现状,提出一种将虚拟仿真技术与无人机维护训练相结合的方法,模拟出近似真实的学习训练环境;遵循逼真性、完备性、实用性、模块化及开放性的原则进行系统总体设计,采用C/S(客户端/服务器)架构,将整个系统工程划分为基础层、数据访问层、业务逻辑层和界面展示层4个层次,并预留接口,便于后期的功能扩展;采用SQLite数据库引擎存储和管理系统信息,并通过脚本编写实现与Unity的通信;借助Unity3D软件,结合中心点围绕技术、四元数旋转技术和鼠标拾取技术,实现无人机交互操作;最终,展示了设备学习、仿真训练及考核评估等功能模块,在实时性、规范性及逼真度等方面都到达了装备训练教学的要求.%Aiming at the shortage of practical training for UAV and the present situation of virtual training system design,the methods of combining virtual simulation technology with UAV maintenance training was put forward in the paper.The approximating learning and training environment was simulated.The system design followed the principle of lifelike,completeness,practicability,modular and openness.The framework of C/S was used to dividing the system engineering into four levels:base layer,data access layer,business logic layer and interface layer.The ports were reserved for later functional extensions.The database engine of SQLite was used to storing and managing system information,and the communication between SQLite and Unity was achieved by scripting.With the help of center point surround technology,quaternion rotating technology and mouse pickuptechnology,the interactions on the plane were carried out in the environment of Unity3D.Finally,the function modules of equipment learning,simulation training,assessment and evaluation were demonstrated in the paper.The performance indexes of the UAV simulation training system,such as real-time,normative and fidelity,could meet the needs of UAV equipment training and teaching.【期刊名称】《计算机测量与控制》【年(卷),期】2018(026)001【总页数】4页(P209-212)【关键词】无人机;模拟训练;三维建模;数据库【作者】矫永康;陈勇;于进勇【作者单位】海军航空工程学院控制工程系,山东烟台264001;海军航空工程学院控制工程系,山东烟台264001;海军航空工程学院控制工程系,山东烟台264001【正文语种】中文【中图分类】TP2420 引言无人机是集成了飞行控制、惯性导航、任务跟踪、光电侦察等多种技术于一身的新型复杂装备 [1],对无人机机务人员的维护保障工作提出了较高要求,需要系统学习才能理解掌握无人机装备工作原理,经过反复训练才能熟练无人机装备的操作使用,以保证顺利完成飞行任务。
“无人机飞行原理”课程“理实一体化”教学设计研究
文章编号:2095-6835(2022)05-0167-03“无人机飞行原理”课程“理实一体化”教学设计研究*王浩,虞君锚(浙江安防职业技术学院智能安防学院,浙江温州325000)摘要:“无人机飞行原理”在高职无人机专业课程体系中属于理论性较强的专业课程,与飞行技术直接相关,是无人机飞行操控的基础。
为了提升教学效果,总结了教学过程中存在的一些问题,并针对性地设计出“理实一体化”的教学模式。
实施结果表明,在理论教学内容的基础上,融入相关的实践教学环节可以极大提高学生的学习兴趣与主观能动性;实施全面的考核评价可以起到良好的导向作用,使学生的知识掌握程度和应用能力均得到较大的提升。
“理实一体化”能切实提高教学效果,实现“无人机飞行原理”课程教学的良性发展。
关键词:教学设计;无人机飞行原理;理实一体化;高职中图分类号:G640.2文献标志码:A DOI:10.15913/ki.kjycx.2022.05.051近年来,随着民用无人机市场的快速发展,无人机在各行业的应用表现出显著的增长趋势,例如航拍、测绘、植保、电力巡检、安防、应急等各行业均对无人机有一定的使用需求[1]。
无人机相较于有人驾驶飞机,简单的操纵方式大大降低了其使用门槛。
在这一新形式下,浙江省于2019年新设立无人机应用技术专业,经过2年发展,浙江安防职业技术学院该专业的建设与人才培养逐渐完善。
其中“无人机飞行原理”作为本专业核心课程,理论性强而且学习难度较大,是学生比较“畏惧”的课程,为提升教学效果,教学团队经过调研与实践,结合学院具体情况,进行了“理实一体化”的教学改革设计,极大提升了学生的学习兴趣与学习效果,逐渐成为受学生欢迎的课程,取得了比较好的教改效果。
1课程基本情况无人机应用技术是中国普通高等学校专科专业,“无人机飞行原理”是该专业的核心基础课程。
该课程以无人机飞行基本理论和分析方法为学习对象,要求学生掌握力学分析在飞行原理当中的应用,旨在提高学生的科学素质,提升理论联系实践、全面分析和解决问题的能力,能为后续其他专业课程的学习奠定基础。
无人机模拟飞行实训教案
项目一“模拟器的训练”模拟器是帮助初学者培养正确的打舵方向和打舵时机的一种电脑模拟软件。
通过在模拟器的练习,能够大大节约入门的时间和成本。
本课程以市场上常用的凤凰模拟器为例作为讲解。
一、掌握悬停技能1、学习目标:能够完成单通道的四个位置的悬停;能够完成带油门通道的八位悬停;2、认识两根摇杆作用建议课时:1学时;教具准备:模型飞机1架。
3、学习目标根据摇杆的运动,能准确说出四个舵面的名称;根据屏幕上飞机的移动,能准确说出是哪根摇杆朝哪个方向运动。
4、学习安排四个舵面的含义:(1)副翼控制飞行器的左右平移,机头不偏转,飞行器绕自身纵轴旋转;(2)俯仰控制飞行器的前后平移,飞行器绕自身横轴旋转;(3)油门控制飞行器的上下平移,飞行器离地的高度发生变化;(4)方向控制飞行器的偏航旋转,飞行器绕自身立轴旋转。
俯仰,方向舵面跟汽车的哪个操作类似?哪几个舵面是汽车所不具备的?俯仰控制类似汽车的前进,后退,方向控制类似汽车的方向盘。
日本手(model1)和美国手(model2)的区别:(1)日本手的特点是控制飞行器姿态的两个舵面俯仰和副翼是分别由左手和右手控制,油门控制在右手,方向控制在左手。
(2)美国手的特点是控制飞行器姿态的两个舵面俯仰和副翼是统一由右手控制,油门和方向控制在左手。
(3)四个舵面对应的摇杆:美国手:副翼J1摇杆,升降J2摇杆,油门J3摇杆,方向J4摇杆日本手:副翼J1摇杆,升降J3摇杆,油门J2摇杆,方向J4摇杆(4)通道的顺序:副翼第1通道,俯仰第2通道,方向第4通道,油门第3通道,螺距(直升机)第6通道。
(5)分别写出以下图例各是哪种运动?分别是哪个舵面控制的?二、八位悬停的含义1、建议课时:1学时;2、教具准备:模型飞机1架;3、学习目标熟悉八位悬停的基本含义;能够理解同一个姿态在离人不同位置处会发生转换;当飞机飞行一个完整的八字航线过程中,简述飞机姿态在各个点的变化过程。
4、学习安排用模型飞机分别演示对尾,对头,左右侧位悬停的状态;用模型飞机分别演示对尾,对头,左右侧位悬停的状态;用模型飞机分别演示45°悬停的四种状态,每个姿态均是以机头朝向的位置来判断的;当飞机以机头向右的状态从左向右飞行的过程中,简述1,2,3,4,5这五个位置相对于操作者姿态的变化过程。
模拟飞行无人机教学设计
模拟飞行无人机教学设计在当今无人机技术日益发展的背景下,模拟飞行无人机教学设计成为了许多学校和机构重要的教学内容。
通过模拟飞行无人机教学设计,学生可以在虚拟环境中进行机载设备控制、飞行器操作和实际情况模拟,从而提高其对飞行无人机技术的理解和应用能力。
一、教学目标1. 了解飞行无人机的基本原理和技术;2. 掌握飞行无人机的操作方法和飞行技巧;3. 理解飞行无人机的应用领域和相关政策法规;4. 提高学生在无人机相关工作和研究中的实践能力。
二、教学内容1. 飞行无人机的基本知识通过模拟飞行无人机教学设计,学生将学习无人机的基本结构、工作原理和飞行原理,在虚拟环境中对飞行无人机进行分析和解剖,深入了解无人机的技术特点和发展趋势。
2. 飞行无人机的操作训练在模拟飞行无人机教学设计中,学生将进行飞行无人机的操作训练,包括遥控器操作、飞行路径规划、机载设备操作等。
学生可以在虚拟环境中模拟各种空中作业场景,如飞行、拍摄、搜救等,通过操作训练提高他们的技术熟练度和应对突发情况的能力。
3. 飞行无人机的应用案例研究通过模拟飞行无人机教学设计,学生将了解各种不同领域中飞行无人机的应用案例,如农业植保、资源勘测、环境监测等。
学生将分析这些应用案例的需求和技术特点,了解无人机在实际应用中的价值和潜力,培养学生的创新思维和跨学科能力。
4. 飞行无人机的政策法规学习无人机飞行相关的政策法规是学生进行操作和应用无人机的基础,通过模拟飞行无人机教学设计,学生将了解无人机的法律法规、飞行限制区域和安全管理要求等内容,掌握合法、安全地操作无人机的基本要求。
三、教学方法1. 模拟实验模拟飞行无人机教学设计可以通过虚拟现实技术和无人机模拟器等工具进行模拟实验。
学生可以在虚拟环境中进行各种飞行操作和应用场景的模拟,提供真实的飞行体验,降低实际操作风险,保护环境和人身安全。
2. 实践训练模拟飞行无人机教学设计应结合实际训练环境进行实践训练,在开放的场地中使用真实的飞行无人机设备进行操作。
无人机驾驶(1+X证书) 多旋翼无人机单通道模拟飞行训练(升降舵)
一、选择题
(1)多旋翼无人机单通道模拟飞行训练是模拟器上实用的训练功能,可以关闭不需训练的通道以减轻初学者的训练负担。
在以训练升降舵操作为主的升降舵单通道模拟飞行训练中,驾驶员应_____(答案 B)
A.随意推拉油门
B.保持手指放在操作杆上
C.将手指离开操作杆
(2)在进行多旋翼无人机升降舵单通道模拟飞行训练时,无人机在姿态模式下运行,且机尾朝向操作者,此时向后拉升降舵无人机会___(答案B)
A.向左侧平飞
B.向后方退飞
C.向前方平飞
(3)在进行多旋翼无人机升降舵单通道模拟飞行训练时,若要控制无人机从平飞状态转为悬停状态,驾驶员应做_____操作(答案 C)A.将升降舵回中 B.前推升降舵 C.向与飞行相反的方向推拉升降舵
(4) 在进行多旋翼无人机升降舵单通道模拟飞行训练时,若无人机在无风的条件下始终向前方飘移,可能的原因是_____(答案A)
A.误碰升降舵
B. 误碰油门
C. 误碰副翼
(5)在进行多旋翼无人机升降舵单通道模拟飞行训练时,若无人机因风力原因发生飘移,应使用____的方式来保持无人机悬停(答案A)
A. 朝来风的方向使用持续小舵量推拉升降舵
B.使用持续小舵量压压右副翼
C. 朝来风的方向将升降舵推拉到底
二、简述题
请简述多旋翼无人机升降舵单通道模拟飞行训练的训练流程与具体操作方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于多旋翼无人机平台的便携式空中训练模拟器设计周㊀辉1,姚㊀伟1,周㊀强2(1.中国电子科技集团公司第五十一研究所,上海201802;2.解放军32090部队,河北秦皇岛066100)摘要:舰载电子战装备存在因辐射源架设原因引起的反射㊁散射问题导致模拟作战训练困难的情况,难以对使用人员的技术水平和操作能力进行快速提升.设计了一款挂载在多旋翼无人机平台上的小型化训练模拟器,可在空中任意位置或任意轨迹遥控发射射频信号模拟训练目标,解决了模拟训练困难的问题.通过样机测试数据及相关试验效果验证了本设计的可行性,可有效提高使用人员的技术水平㊁操作能力.关键词:电子战装备;训练模拟器;多旋翼无人机;技术水平中图分类号:T N 97㊀㊀㊀㊀㊀㊀㊀㊀文献标识码:B ㊀㊀㊀㊀㊀㊀㊀文章编号:C N 32G1413(2019)03G0104G04D O I :10.16426/j .c n k i .jc d z d k .2019.03.023D e s i g no fP o r t a b l eA i rT r a i n i n g Si m u l a t o rB a s e do n M u l t i Gr o t o rU A VP l a t f o r mZ HO U H u i 1,Y A O W e i 1,Z HO U Q i a n g2(1.T h e 51s tR e s e a r c h I n s t i t u t e o fC E T C ,S h a n gh a i 201802,C h i n a ;2.U n i t 32090o fP L A ,Q i n h u a n gd a o 066100,C h i n a )A b s t r a c t :T he p r o b l e m s of r e f l e c t i o n a n d s c a t t e r i ng c a u s e d b y th e e x e r ti o n o f r a d i a t i o n s o u r c e s e x i s t i n s h i p Gb o r n e e l e c t r o n i cw a r f a r ee q u i p m e n t ,w h i c h m a k e s i td i f f i c u l t t os i m u l a t ec o m b a t t r a i n i n g ,a n d i t i s d i f f i c u l t t o r a p i d l y i m p r o v e t h e t e c h n i c a l l e v e l a n d o p e r a t i o n a b i l i t y o f t h e u s e r s .T h i s p a pe r d e s i g n s am i n i a t u r i z e d t r a i n i n g si m u l a t o rm o u n t e do nm u l t i Gr o t o r u n m a n n e da e r i a l v e h i c l e (U A V )p l a t f o r m ,w h i c hc a nr e m o t e l y c o n t r o l st h er a d i of r e q u e n c y s i gn a l st r a n s m i s s i o nt os i m u l a t et h e t r a i n i n g t a r g e t s a t a n yp o s i t i o no r t r a j e c t o r y i n t h e s k y ,s oa s t os o l v e s t h ed i f f i c u l t y o f s i m u l a t i o n t r a i n i n g .T h r o u g h t h e t e s t d a t a o f t h e p r o t o t y p e a n d t h e r e l a t i v e t e s t r e s u l t s ,t h e f e a s i b i l i t y of t h e d e s ig n i s v e r i f i e d ,a n d th e t e c h ni c a l l e v e l a n do p e r a t i o n a b i l i t y o f u s e r s c a nb e i m p r o v e d e f f e c t i v e l y .K e y wo r d s :e l e c t r o n i cw a r f a r ee q u i p m e n t ;t r a i n i n g s i m u l a t o r ;m u l t i Gr o t o ru n m a n n e da e r i a l v e h i c l e ;t e c h n i c a l l e v e l收稿日期:201905070㊀引㊀言电子战装备在战争中发挥着越来越重要的作用,电子信息装备数量日趋庞大,运用复杂,种类繁多[1],特别是雷达侦察设备的应用最为广泛[2].随着电子战装备的高频率使用,如何提高使用人员技术能力㊁操作水平,保障电子战装备性能完好,充分发挥装备的战斗力,是现下亟需解决的问题.本文根据舰载电子战装备训练存在困难的情况,提出基于多旋翼无人机平台的便携式空中模拟训练器设计方案,可适用于舰载电子战装备的日常训练㊁试验验证等,达到提升使用人员的技术水平㊁充分发挥电子战装备战斗力的作用.1㊀需求分析1 1㊀电子战装备训练情况舰载电子战装备进行训练一是依靠装备本身设计进行自检判断设备工作状态是否正常,二是使用射频注入法测试来检验装备的接收机㊁信号处理系2019年6月舰船电子对抗J u n .2019第42卷第3期S H I P B O A R DE L E C T R O N I CC O U N T E R M E A S U R EV o l .42N o .3统等性能[3],此2种方法无法对装备作战效果进行评估.使用射频信号产生器等单点源架设在舰船或岸上等进行定点辐射测试检验装备的侦收㊁跟踪等作战效果,此方法辐射源信号样式单一,且因场地原因移动辐射源极为不便,也容易存在遮挡㊁反射㊁海面散射等导致的多径效应而无法侦收到目标信号.通过对海面雷达散射截面的测量,表明海面散射在低入射角时更突出[4],理论上来说,海面多路径效应随着目标高度的减小而越来越明显[5],因此,架设辐射源对装备进行训练存在较大困难.以上因素导致装备在使用过程中,不能深入进行训练,无法系统性地提高使用人员的技术水平和操作能力,更无法模拟作战环境来充分评估装备作战能力.1 2㊀空中模拟训练器可行性分析舰载电子战装备在进行训练或演习时,使用运输机㊁战斗机等军用飞行平台或其它舰船搭载固定目标设备,协调难度大,训练时间固定,主要用于试验验证等重要活动.近年来,多旋翼无人机迅猛发展,电子设备集成度也越来越高,为设计便携式空中模拟训练器提供了有力基础.基于多旋翼无人机平台的便携式空中模拟训练器(以下简称模拟训练器)使用多旋翼无人机作为飞行平台,搭载集成度高的小型化信号模拟器,在任意空中方位或轨迹遥控发射多种类型的射频信号来模拟训练目标,舰载电子战装备对模拟训练目标开展相关动作,从而达到训练㊁试验验证等目的,可提高使用人员的分析㊁判断等技术能力,充分了解装备的性能,为装备形成战斗力奠定基础.模拟训练器工作示意图如图1所示.图1㊀模拟训练器工作示意图1 3㊀主要优点分析(1)无人机平台操控简单,飞行场地要求低,放飞㊁回收操作简单.(2)可在空中悬停㊁飞行或沿轨迹飞行.(3)可避免舰船上各种装置导致的遮挡㊁反射,避免形成多径效应.(4)集成度高,体积小,重量轻,便于携带.(5)可产生典型的各种雷达信号,并实时遥控切换雷达样式及更改相关参数.(6)遥控距离长,成本低,开发度高,可靠性㊁维修性高.2㊀设计实现方案模拟训练器主要由无人机平台㊁信号模拟器㊁通信单元及地面终端设备等组成,组成框图如图2所示.图2㊀模拟训练器组成框图2 1㊀无人机平台本方案无人机平台选用商用大疆M600P R O 六轴飞行器,飞行载重6k g,控制距离5k m.满载时,以距离受训装备水平距离500m,高度133m为例,无人机到达指定位置开展工作可持续时间不小于16m i n,满足一般训练需求.2 2㊀信号模拟器舰载侦察装备主要工作频段有L㊁S㊁C及X/ K U波段,考虑到体积㊁重量等因素,需要按实际需求对信号模拟器进行分频段设计.本方案设计频段为X/K u波段(8~18G H z).信号模拟器包括直接数字序列(D D S)单元㊁射频单元㊁天线㊁电源模块㊁通信单元等,如图3所示.信号模拟器产生规定参数的单一射频信号㊁线性调频等多种射频信号.(1)D D S模块D D S模块主要由信号产生单元和系统控制单元组成,如图4所示.D D S模块中的系统控制单元中的现场可编程门阵列(F P G A)接收远程控制系统的信号参数,将该参数编译后,把相应指令发给信号产生单元模/数501第3期周辉等:基于多旋翼无人机平台的便携式空中训练模拟器设计图3㊀信号模拟器组成框图图4㊀D D S 模块组成框图转换器(A D C ).A D C 接到控制指令后产生对应的雷达中频信号,经过低通滤波器及低噪放后送给射频模块.同时系统控制单元将相应的指令发给射频模块,实现对射频模块中的变频通道㊁本振及功放的控制.最终实现地面终端设置指定参数的雷达中频信号的产生.D D S 工作原理图如图5所示.图5㊀D D S 工作原理图(2)射频模块射频模块主要由变频通道㊁本振及功放组成,如图6所示.图6㊀射频模块组成框图D D S 输出的100~500MH z 的中频信号进入射频模块中的变频通道,同时本振接收控制单元的指令,输出相应的本振信号给变频通道,变频通道输出指定参数的雷达信号,该信号经过功放放大,最终输出不低于30d B m 的射频信号.工作原理图如图7所示.(3)天线采用增益优于7d B i 的喇叭天线.图7㊀射频模块工作原理图(4)通信单元通信单元由1对S X 1278无限数传模块(地面及机载)及对应的通信天线组成,其中地面部分与地面终端连接,机载部分与信号模拟器连接.地面终端设备通过系统控制软件将系统控制命令发给通信模块地面部分,接收命令后通过天线将数据发送给机载部分通信模块,机载通信模块接收数据后将该数据发给信号模拟器中的D D S 控制单元,实现地面对信号模拟器的远程无线控制.2 3㊀地面终端设备地面终端设备分为无人机遥控装置及信号模拟器发生器遥控装置.无人机遥控装置主要用于对无人机的飞行姿态控制㊁轨迹规划控制.信号模拟器遥控装置用于对信号模拟器的控制.通过人机交互界面显示模块,可对信号模拟器实现实时信号参数设置.同时,遥控装置通过日志记录模块记录训练器工作参数㊁工作时间等信息,为地面分析提供数据支撑.2 4㊀模拟训练器主要技术指标实现频率覆盖范围:8~18G H z;信号样式:可实现常规脉冲信号㊁线性调频信号㊁频率捷变信号㊁脉冲多普勒信号等;等效辐射功率:不小于5W (37d B m );工作距离:按照信号模拟器与受训装备距离500m ,无人机搭载信号模拟器发射18G H z 频率点进行配置,根据空间衰减公式:P =32 5+l g f +20l g R (1)式中:f 为射频信号频率(MH z );R 为模拟训练器与受训装备距离(k m ).601舰船电子对抗㊀㊀㊀第42卷㊀实际到达受训装备的信号功率P 1为:P 1=37-32 5-20l g 18000-20l g0 5=-74d B m .P 1满足受训电子战装备灵敏度的要求.其它型号装备进行训练时,可根据对应型号装备的实际灵敏度要求,适当对飞行距离进行调整.3㊀模拟训练器效果验证(1)装备扫描能力㊁跟踪能力训练模拟训练器与某受训无源侦察装备水平距离200m ㊁高度20m 时,受训装备进行扇扫能力及信号识别分选训练,可稳定侦收到模拟训练器发出的射频信号,并能分选识别.对某受训干扰装备进行侦收㊁跟踪能力训练,受训装备能够侦收到射频信号并分选,进入跟踪状态后可进行锁定跟踪.模拟训练器按一定轨迹飞行时,受训装备持续锁定跟踪.(2)装备侦察效果训练对某无源侦察装备进行训练时,分选模拟训练器发射的常规信号㊁频率捷变信号以及重频参差信号数据如图8~图10所示.图8㊀常规雷达信号分选图9㊀频率捷变信号分选图10㊀重频参差信号分选4㊀模拟训练器拓展无人机平台可搭载信号模拟器,也可搭载小型干扰设备对舰载探测雷达进行训练,举例设计无人机平台搭载工作于S 波段的可产生多批假目标的小型有源干扰设备,其等效辐射功率为P r =1W ,距离受训装备R =500m ,模拟战斗机假目标.受训装备为工作于S 波段的某相控阵雷达,其等效辐射功率为P t G t =20k W .战斗机的典型R C S 为5~100m 2之间,R C S 取值σ=100m 2[6].根据雷达功率密度公式:P D =P t G t /4πR 2(2)㊀㊀理论上受训装备在500m 处100m 2R C S 的辐射功率为:P 2=P D σ=P t G t σ/4πR 2=0 64W .干扰设备等效辐射功率大于P 2值,因此干扰设备功率上满足战斗机R C S 反射功率要求,可模拟战斗机假目标.实际相控阵雷达探测训练效果如图11㊁图12所示,相控阵雷达进行探测时,小型化干扰设备产生了多批假目标,对雷达产生了干扰,并随着时间的移动假目标逐渐接近雷达.操作人员需要立刻对干扰源进行判断识别,并采取相应措施进行抗干扰训练.从试验效果上看,显示界面上假目标功率未变化,不符合逐渐接近的动目标探测效果,因此,可对干扰设备进行输出功率控制设计,以更逼真地模拟假目标效果.图11㊀某相控阵雷达训练效果起始干扰5㊀结束语在信号形式越来复杂的电磁环境下,使用模拟训练器对电子战装备进行训练,可以有效提高装备使用人员的技术能力㊁操作能力,增强装备技术能㊀㊀㊀(下转第120页)701第3期周辉等:基于多旋翼无人机平台的便携式空中训练模拟器设计图9㊀安全流量试验图10㊀随机振动试验图11㊀冲击试验图12㊀湿热试验㊀㊀(3)自密封浮动盲插流体连接器具有一定的径向浮动功能,降低了生产加工精度的要求,提高了生产装配效率.参考文献[1]㊀周于凯.船舶液压管接头的识别与选配研究[J ].船舶标准化与质量,2018(3):3740,53.[2]㊀欧阳小平,方旭,朱莹.航空液压管接头综述[J ].中国机械工程,2015(16):22622271.[3]㊀袁汉钦,袁世松.流体连接器的用户试验失效分析[J ].机电元件,2014,34(3):3638.[4]㊀苏太东,周庆平.S L T 08型流体连接器的设计[J ].机电元件,2014,34(3):37.[5]㊀成大先.机械设计手册(第3卷)[M ].5版.北京:化学工业出版社,2007.[6]㊀魏超.一种流体连接器的流阻测试方法[J ].计量与测试技术,2014,41(8):89.㊀㊀(上接第107页)图12㊀某相控阵雷达训练效果逐渐逼近力,保障力量,提高装备效能,充分发挥装备战斗力.参考文献[1]㊀夏军成,戴春华,张英波.海战场复杂电磁环境对舰载雷达侦察机的影响及措施分析[J ].舰船电子对抗,2008,31(1):58.[2]㊀李晓阳,郭万海,王作超.舰船电子侦察装备无源定位最优化研究[J ].国防技术基础,2010(9):3538.[3]㊀王丹梅.舰载雷达侦察装备模拟训练系统[J ].舰船电子对抗,2007,30(5):7982.[4]㊀T R A N N ,C HA P R O N B .C o m b i n e d w i n dv e c t o ra n ds e a s t a t e i m p a c t o n o c e a nn a d i r Gv i e w i n g K u Ga n dC Gb a n d r a d a r c o r s s Gs e c t i o n s [J ].S e n s o r s ,2006,6(3):193207.[5]㊀崔浩,李岩,郑昌.海面多径效应对舰载雷达探测低空目标的影响[J ].舰船电子工程,2009,175(1):104106.[6]㊀魏刚,杨超.雷达对抗工程基础[M ].成都:电子科技大学出版社,2006.021舰船电子对抗㊀㊀㊀第42卷㊀。