递推最小二乘法的Matlab程序
递推最小二乘法参数估计matlab程序
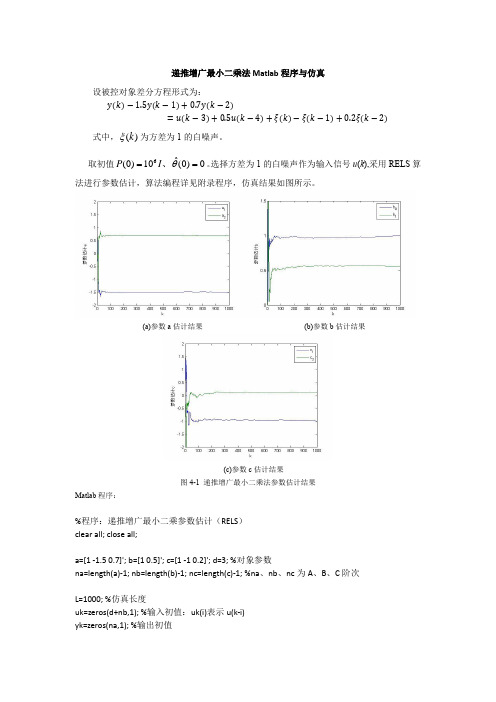
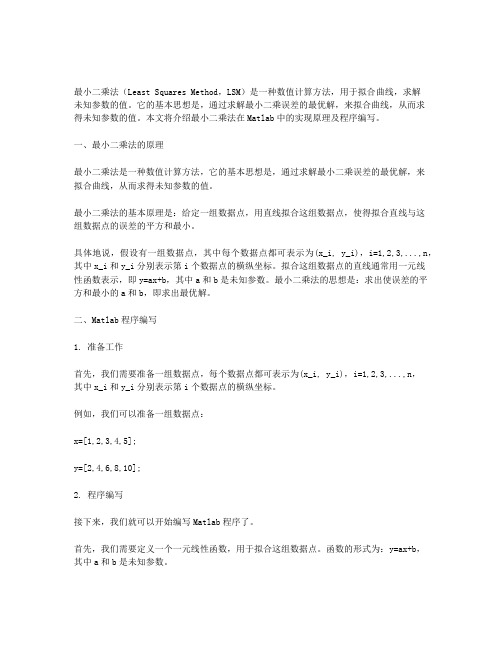
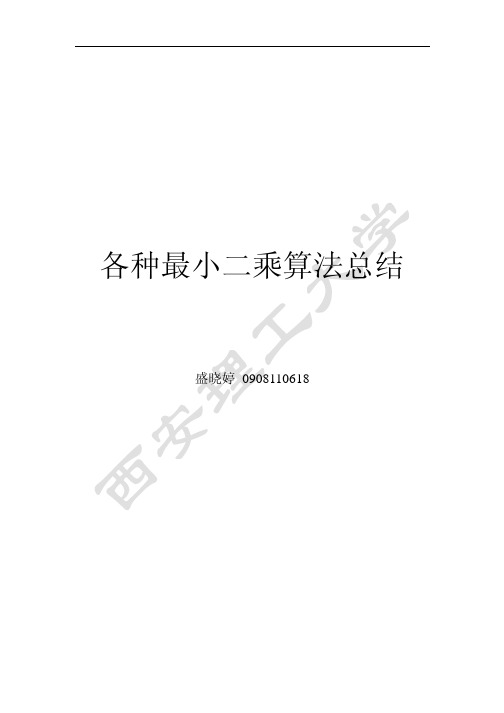
递推增广最小二乘法Matlab 程序与仿真设被控对象差分方程形式为:y (k )−1.5y (k −1)+0.7y (k −2)=u (k −3)+0.5u (k −4)+ξ(k )−ξ(k −1)+0.2ξ(k −2)式中,为方差为1的白噪声。
取初值6ˆ(0)10(0)0P I θ==、。
选择方差为1的白噪声作为输入信号u (k ),采用RELS 算法进行参数估计,算法编程详见附录程序,仿真结果如图所示。
(a)参数a 估计结果 (b)参数b 估计结果(c)参数c 估计结果图4-1 递推增广最小二乘法参数估计结果Matlab 程序:%程序:递推增广最小二乘参数估计(RELS )clear all; close all;a=[1 -1.5 0.7]'; b=[1 0.5]'; c=[1 -1 0.2]'; d=3; %对象参数na=length(a)-1; nb=length(b)-1; nc=length(c)-1; %na 、nb 、nc 为A 、B 、C 阶次L=1000; %仿真长度uk=zeros(d+nb,1); %输入初值:uk(i)表示u(k-i)yk=zeros(na,1); %输出初值()kξxik=zeros(nc,1); %噪声初值xiek=zeros(nc,1); %噪声估计初值u=randn(L,1); %输入采用白噪声序列xi=sqrt(0.1)*randn(L,1); %白噪声序列theta=[a(2:na+1);b;c(2:nc+1)]; %对象参数thetae_1=zeros(na+nb+1+nc,1); %na+nb+1+nc为辨识参数个数P=10^6*eye(na+nb+1+nc);for k=1:Lphi=[-yk;uk(d:d+nb);xik];y(k)=phi'*theta+xi(k); %采集输出数据phie=[-yk;uk(d:d+nb);xiek]; %组建phie%递推增广最小二乘法K=P*phie/(1+phie'*P*phie);thetae(:,k)=thetae_1+K*(y(k)-phie'*thetae_1);P=(eye(na+nb+1+nc)-K*phie')*P;xie=y(k)-phie'*thetae(:,k); %白噪声的估计值%更新数据thetae_1=thetae(:,k);for i=d+nb:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=na:-1:2yk(i)=yk(i-1);endyk(1)=y(k);for i=nc:-1:2xik(i)=xik(i-1);xiek(i)=xiek(i-1);endxik(1)=xi(k);xiek(1)=xie;endfigure(1)plot([1:L],thetae(1:na,:));xlabel('k'); ylabel('参数估计a');legend('a_1','a_2'); axis([0 L -2 2]);figure(2)plot([1:L],thetae(na+1:na+nb+1,:)); xlabel('k'); ylabel('参数估计b');legend('b_0','b_1'); axis([0 L 0 1.5]); figure(3)plot([1:L],thetae(na+nb+2:na+nb+nc+1,:)); xlabel('k'); ylabel('参数估计c');legend('c_1','c_2'); axis([0 L -2 2]);。
最小二乘法matlab程序
最小二乘法(Least Squares Method,LSM)是一种数值计算方法,用于拟合曲线,求解未知参数的值。
它的基本思想是,通过求解最小二乘误差的最优解,来拟合曲线,从而求得未知参数的值。
本文将介绍最小二乘法在Matlab中的实现原理及程序编写。
一、最小二乘法的原理最小二乘法是一种数值计算方法,它的基本思想是,通过求解最小二乘误差的最优解,来拟合曲线,从而求得未知参数的值。
最小二乘法的基本原理是:给定一组数据点,用直线拟合这组数据点,使得拟合直线与这组数据点的误差的平方和最小。
具体地说,假设有一组数据点,其中每个数据点都可表示为(x_i, y_i),i=1,2,3,...,n,其中x_i和y_i分别表示第i个数据点的横纵坐标。
拟合这组数据点的直线通常用一元线性函数表示,即y=ax+b,其中a和b是未知参数。
最小二乘法的思想是:求出使误差的平方和最小的a和b,即求出最优解。
二、Matlab程序编写1. 准备工作首先,我们需要准备一组数据点,每个数据点都可表示为(x_i, y_i),i=1,2,3,...,n,其中x_i和y_i分别表示第i个数据点的横纵坐标。
例如,我们可以准备一组数据点:x=[1,2,3,4,5];y=[2,4,6,8,10];2. 程序编写接下来,我们就可以开始编写Matlab程序了。
首先,我们需要定义一个一元线性函数,用于拟合这组数据点。
函数的形式为:y=ax+b,其中a和b是未知参数。
%定义函数f=@(a,b,x)a*x+b;然后,我们需要定义一个误差函数,用于计算拟合直线与这组数据点的误差的平方和。
%定义误差函数error=@(a,b)sum((y-f(a,b,x)).^2);最后,我们就可以使用Matlab提供的fminsearch函数,求解最小二乘误差的最优解,即求出最优a和b的值。
%求解最优解[a,b]=fminsearch(error,[1,1]);经过上面的程序编写,我们就可以求得未知参数a和b的最优值。
matlab练习程序(递推最小二乘)

matlab练习程序(递推最⼩⼆乘)⼀般的最⼩⼆乘通常是⼀次拿到全部的数据,对所有数据进⾏统⼀优化计算得到模型系数。
递推最⼩⼆乘是以⼀种递推的⽅式计算最⼩⼆乘,每次使⽤最新的测量值,来不断更新模型系数。
递推公式如下:公式中A和B为测量值,X为模型系数。
matlab代码如下:clear all;close all;clc;a=2;b=2;c=-3;d=1;e=2;f=30; %原始系数[x,y]=meshgrid(0:0.1:30);z=a*x.^2+b*y.^2+c*x.*y+d*x+e*y +f; %模型mesh(x,y,z)hold on;%%准备数据X=x(:);Y=y(:);Z=z(:);p = randperm(90000,100); %90000个点中随机选100个X=X(p);Y=Y(p);Z=Z(p);plot3(X,Y,Z,'ro')%%正常最⼩⼆乘A=[X.^2 Y.^2 X.*Y X Y ones(length(X),1)];B=Z;C=inv(A'*A)*A'*B;%%递推最⼩⼆乘figure;plot3(X,Y,Z,'ro')hold on;P = eye(6)*1000;X = zeros(6,1);for i=1:length(A)A1 = A(i,:);% P = inv(inv(P)+A1'*A1);P = P - P*A1'*A1*P/(1+A1*P*A1');X = X + P*A1'*(B(i) - A1*X);end%%画出RLS计算出的结果a=X(1);b=X(2);c=X(3);d=X(4);e=X(5);f=X(6); %拟合系数[x,y]=meshgrid(0:0.1:30);z=a*x.^2+b*y.^2+c*x.*y+d*x+e*y +f; %模型mesh(x,y,z)拟合结果:从结果上看,递推最⼩⼆乘结果不如常规最⼩⼆乘精确。
各种最小二乘法汇总(算例及MATLAB程序)
u(400)
⎟ ⎠
Matlab程序见附录 1。
1.2. 递推最小二乘算法
递推最小二乘算法公式:
^
^
^
θ (k) = θ (k −1) + K (k)[z(k) − h' (k)θ (k −1)]
K (k) = P(k −1)h(k)[h' (k)P(k −1)h(k) + 1 ]−1
(1.2)
Λ(k)
b2 a1 50 100 150 200 250 300 350 400 450
图 1 一般最小二乘参数过渡过程
4
盛晓婷 最小二乘算法总结报告
估计方差变化过程
100
90
80
70
60
50
40
30
20
10
0
0
50 100 150 200 250 300 350 400 450
图 2 一般最小二乘方差变化过程
1.1. 一次计算最小二乘算法
⎛ ⎜
^
a1
⎞ ⎟
⎛ -1.4916 ⎞
^
θ
LS
=
⎜^ ⎜ a2 ⎜^ ⎜ b1
⎟ ⎟ ⎟ ⎟
=
(
H
T L
H
L
)−1
H
T L
Z
L
=
⎜ ⎜
0.7005
⎟ ⎟
⎜1.0364 ⎟
⎜
⎟
(1.1)
⎜⎜⎝
^
b2
⎟⎟⎠
⎝ 0.4268 ⎠
⎛ Z (3) ⎞
⎛ hT (3) ⎞ ⎛ −Z (2) −Z (1)
图 1 一般最小二乘参数过渡过程 .....................................................4 图 2 一般最小二乘方差变化过程 ....................................................5 图 3 遗忘因子法参数过渡过程 ........................................................7 图 4 遗忘因子法方差变化过程 ........................................................8 图 5 限定记忆法参数过渡过程 ......................................................10 图 6 限定记忆法方差变化过程 ......................................................10 图 7 偏差补偿最小二乘参数过渡过程 ..........................................12 图 8 偏差补偿最小二乘方差变化过程 ..........................................12 图 9 增广最小二乘辨识模型 ..........................................................13 图 10 增广最小二乘参数过渡过程 ................................................14 图 11 广义最小二乘参数过渡过程 ................................................16 图 12 广义最小二乘方差变化过程 ................................................16 图 13 辅助变量法参数过渡过程 ....................................................18 图 14 辅助变量法方差变化过程 ....................................................18 图 15 二步法参数过渡过程 ............................................................20 图 16 二步法方差变化过程 ............................................................20
最小二乘法matlab程序

最小二乘法matlab程序最小二乘法是一种统计模型,它可以被用来拟合一元函数数据,或者拟合非线性曲线。
它的基本思想是找到一组参数,使得拟合的曲线与实际数据的差距最小。
本文将介绍如何使用Matlab实现一个最小二乘法的程序,并与现有的一些现成的最小二乘法的matlab程序进行比较,找出其优缺点。
首先,要使用最小二乘法拟合曲线,需要准备一组输入数据,一般可以将其表示为两个向量,分别是自变量x和因变量y。
这些数据可以是由测量和实验得到的,也可以是由人工输入的,但无论如何都要确保它们的准确性。
接下来,就可以使用Matlab输入数据进行处理,用最小二乘法计算出最拟合的曲线及其参数。
具体步骤主要分为三步:第一步是计算输入数据的均值和方差,包括自变量x和因变量y的均值和方差;第二步是计算自变量x和因变量y的关系,即最小二乘拟合曲线的系数;第三步是验证拟合的曲线的准确性,如果不满意,可以重新调整参数,以获得较好的拟合效果。
此外,Matlab除了提供自带的最小二乘法函数外,还支持第三方开发者开发现成的matlab程序,用于解决最小二乘法的问题。
这些程序中有一些是开源的,另一些则是出售的。
其中开源的有LEAST,CURVEFIT,CURVEFITTOOL等,而出售的有MATLAB Curve Fitting Toolbox,Optimization Toolbox和Statistics Toolbox等。
它们的突出特点是速度快,代码简洁,容易上手,适用于多种拟合类型。
然而,各种matlab程序也有自身的缺点,最明显的就是当输入数据非常庞大时,它们的计算能力就无法跟上,速度就会变慢。
此外,使用出售的matlab程序可能相对昂贵,而且有时需要安装某些复杂的库文件,这也是一种麻烦。
因此,使用最小二乘法拟合曲线时,可以参考现有的matlab程序,也可以自己编写matlab代码,同时要考虑到程序的可靠性、效率和可行性。
本文介绍的matlab程序的最大优势是它不需要依赖第三方的软件,而且能够满足大多数用户的需求,使得最小二乘法可以在短时间内被成功运用。
实验4 递推最小二乘法的实现
位矩阵,则经过若干次递推之后能得到较好的参数估计。
3
4.实验对象或参数 给定系统
y (k ) a1 y (k 1) a2 y ( k 2) b0u ( k ) b1u (k 1) b2u (k 2) (k ) (15)
即 n 2 。假设实际系统的参数为 a1 2 , a2 1.3 , b0 0.4 , b1 0.88 , b2 2.2 , 但是不已知,即不可测。取 (k ) [0.1, 0.1] 的零均值白噪声。输入信号取为
u (k ) 1.5sin 0.2k
(16)
要求编制 MATLAB 程序,运用递推最小二乘法对这一系统的参数进行在线辨识,并 将辨识结果与实际参数进行对比。
5.程序框图
开始
程序初始化与赋初值
由先前输入输出生成 ΨN+1
用户输入初值设定常数c
由系统模型计算获得yN+1
设定初值θ0和P0
由递推最小二乘辨识公式得到 KN+1、PN+1、θN+1
y (1) u (n 1) u (1) y ( n) y (n 1) y (2) u (n 2) u (2) y (n N 1) y ( N ) u (n N ) u ( N )
(1)
其中 a1,a2…an,b0,b1,b2…bn 为待辨识的未知参数, ( k ) 是不相关随机序列。y 为系 统的输出, u 为系统的输入。 分别测出 n+N 个输出、 n+N 输入值 y(1), y(2)…y(n+N), u(1), u(2)…u(n+N),则可写出 N 个方程,具体写成矩阵形式,有
递推最小二乘法算法
---------------------------------------------------------------最新资料推荐------------------------------------------------------递推最小二乘法算法题目:(递推最小二乘法)考虑如下系统:) ( ) 4 ( 5 . 0 ) 3 ( ) 2 ( 7 . 0 ) 1 ( 5 . 1 ) ( k k uk u k y k y k y + + = + 式中,) (k 为方差为 0.1 的白噪声。
取初值 I P610 ) 0 ( = 、 0 0 =)(。
选择方差为 1 的白噪声作为输入信号 ) (k u ,采用 PLS 法进行参数估计。
Matlab代码如下:clear all close all L=400; % 仿真长度 uk=zeros(4,1); %输入初值:uk(i) 表示u(k-i) yk=zeros(2,1); % 输出初值u=randn(L,1); % 输入采用白噪声序列xi=sqrt(0.1)*randn(L,1); % 方差为0.1 的白噪声序列theta=[-1.5;0.7;1.0;0.5]; % 对象参数真值thetae_1=zeros(4,1); % ()初值 P=10 *eye(4); % 题目要求的初值 for k=1:L phi=[-yk;uk(3:4)]; %4004 矩阵 phi 第k 行对应的y(k-1),y(k-2),u(k-3), u(k-4) y(k)=phi’*theta+xi(k); % 采集输出数据 % 递推最小二乘法的递推公式K=P*phi/(1+phi’*P*phi);1/ 3thetae(:,k)=thetae_1+K*(y(k)-phi’*thetae_1);P=(eye(4)-K*phi’)*P; % 更新数据thetae_1=thetae(:,k); for i=4:-1:2 uk(i)=uk(i-1); end uk(1)=u(k); fori=2:-1:2 yk(i)=yk(i-1); end plotxlablege%ax结分系统由C可以我们end yk(1)=y(kt([1:L],thetabel(‘k’); ylabend(‘a_1’,’a_xis([0 L -2 2果析如下统方程为 ( yCAR模型:( y以得到:们可以知道k); ae); %line([bel(‘参数估_2’,’b_0’,’b_2]); ( 5 . 1 ) ( k y k ( 5 . 1 ) ( k y k =道纯迟延为31,L],[theta,计 a、b’);1’); ( 7 . 0 ) 1 y k + 7 .0 ) 1 y k 1 )(= z A(1 z BT,na=2,theta]); ( ) 2 ( k u k = ( )2 ( k u k + 15 . 1 1+ = z0 1 ( )3 + = znb=1,d=35 . 0 ) 3 u k+ 5 . 0 ) 3 u k + 27 . 0 z ) 5 . 01 z 3, ( ) 4 (k u + ( )4 (k u + ) (k ) (k phi(y(k)列向这是一开初始所以经过的y于是不同 pphi 递推相比(k,:)=[-yk;u)=phi*theta向量不需要是循环的主开始我们赋始输入 u(0)以过白噪声的y(1)给到下一是我让程序同:phi = -1.9333 -3.3952 -0.4448 -0.4710 推最小二乘比于第一次uk(3:4)]’; 40a+xi(k);输出要用phi(k,:)形主体,接下来赋给初值给输=u(-1)=u(-21 ) 1 ( = y更新代码后一组y(2)的计) 2 ( =---------------------------------------------------------------最新资料推荐------------------------------------------------------y序中显示phi乘法phi截图如次作业的批处04矩阵ph出等于矩阵p形式来输入以及输2)=u(-3)=0;7 . 0 ) 0 ( 5 . 1 y后,以及输入计算中区去. 0 ) 1 ( 5 . 1 y以便只观的如下:处理最小二hi第k行对应phi与真值矩输出;初始输出- ( ) 1 - ( 7 +u y入输出值得去:- ( ) 0 ( 7 +u y的表现递推最二乘法的phi应的y(k-1),y矩阵相乘加出 y(0)=y(-1)3 - ( 5 . 0 ) 2 - + u得更新后我们2 - ( 5 .0 ) 1 + u最小二乘法:y(k-2),u(k-3加上白噪声。
matlab最小二乘法编程
matlab最小二乘法编程
最小二乘法是一种常用的数学方法,可以用来求解数据拟合问题。
在MATLAB中,我们可以通过以下步骤编写最小二乘法程序:
1. 首先,我们需要准备数据。
我们可以使用MATLAB的数据导入工具来导入数据,也可以手动创建一个包含X和Y值的矩阵。
2. 接下来,我们需要定义模型函数。
在最小二乘法中,我们通常使用线性模型 y = a*x + b。
3. 然后,我们需要使用 MATLAB 的 polyfit 函数来求出 a 和 b 的值,并得到拟合直线的参数。
4. 最后,我们可以使用 polyval 函数来计算预测值,并将数据和预测值可视化。
下面是MATLAB的最小二乘法编程示例:
%准备数据
x = [1 2 3 4 5 6];
y = [1.1 1.9 3.1 4.0 5.2 6.1];
%定义模型函数 y = a*x + b
f = @(a,x)(a(1)*x + a(2));
%最小二乘法拟合
a_initial = [1 1];
a_fit = lsqcurvefit(f,a_initial,x,y);
%计算预测值
y_fit = f(a_fit,x);
%绘制数据和拟合直线
plot(x,y,'o',x,y_fit,'-');
legend('原始数据','拟合直线');
xlabel('X');
ylabel('Y');
title('最小二乘法拟合');。
递推最小二乘法的Matlab程序
递推最⼩⼆乘法的Matlab程序clear %清理⼯作间变量L=502; % M序列的周期y1=1;y2=1;y3=1;y4=0; %四个移位寄存器的输出初始值for i=1:L;%开始循环,长度为Lx1=xor(y3,y4); %第⼀个移位寄存器的输⼊是第三个与第四个移位寄存器的输出的“或”x2=y1; %第⼆个移位寄存器的输⼊是第⼀个移位寄存器的输出x3=y2; %第三个移位寄存器的输⼊是第⼆个移位寄存器的输出x4=y3; %第四个移位寄存器的输⼊是第三个移位寄存器的输出y(i)=y4; %取出第四个移位寄存器的幅值为"0"和"1"的输出信号,即M序列if y(i)>0.5,u(i)=-1; %如果M序列的值为"1", 辨识的输⼊信号取“-0.03”else u(i)=1; %如果M序列的值为"0", 辨识的输⼊信号取“0.03”end %⼩循环结束y1=x1;y2=x2;y3=x3;y4=x4; %为下⼀次的输⼊信号做准备end %⼤循环结束,产⽣输⼊信号uz(2)=0;z(1)=0; %设z的前两个初始值为零randn('seed',0)a=0.1*randn(L,1);for k=3:L; %循环变量从3到15z(k)=1*z(k-1)-0.632*z(k-2)+0.638*u(k-1)+0.264*u(k-2); %输出采样信号endc0=[0.001 0.001 0.001 0.001]'; %直接给出被辨识参数的初始值,即⼀个充分⼩的实向量p0=10^6*eye(4,4); %直接给出初始状态P0,即⼀个充分⼤的实数单位矩阵E=0.000000005; %取相对误差E=0.000000005c=[c0,zeros(4,15)]; %被辨识参数矩阵的初始值及⼤⼩e=zeros(4,L); %相对误差的初始值及⼤⼩for k=3:L; %开始求Kh1=[-z(k-1),-z(k-2),u(k-1),u(k-2)]'; x=h1'*p0*h1+1; x1=inv(x); %开始求K(k)k1=p0*h1*x1;%求出K的值d1=z(k)-h1'*c0; c1=c0+k1*d1; %求被辨识参数ce1=c1-c0; %求参数当前值与上⼀次的值的差值e2=e1./c0; %求参数的相对变化e(:,k)=e2; %把当前相对变化的列向量加⼊误差矩阵的最后⼀列c0=c1; %新获得的参数作为下⼀次递推的旧参数c(:,k)=c1; %把辨识参数c 列向量加⼊辨识参数矩阵的最后⼀列p1=p0-k1*k1'*[h1'*p0*h1+1]; %求出 p(k)的值p0=p1; %给下次⽤if e2<=E break; %如果参数收敛情况满⾜要求,终⽌计算end %⼩循环结束end %⼤循环结束c%分离参数a1=c(1,:); a2=c(2,:); b1=c(3,:); b2=c(4,:);[N,M]=size(c);figure(1); %第⼆个图形i=1:M; %横坐标从1到15plot(i,a1,'r',i,a2,':',i,b1,'g',i,b2,':') %画出a1,a2,b1,b2的各次辨识结果title('Parameter Identification with Recursive Least Squares Method') %图形标题gtext('\leftarrowa1')gtext('\leftarrowa2')gtext('\downarrowb1')gtext('\uparrowb2')。
matlab递推最小二乘法函数
一、介绍在数学和工程领域中,最小二乘法是一种常见的参数估计方法,用于寻找一组参数使得观测数据和模型预测值之间的误差最小。
而在matlab中,递推最小二乘法函数是指使用递推方式来实现最小二乘法计算的函数。
本文将介绍matlab中如何编写递推最小二乘法函数,并对其原理和应用进行详细讲解。
二、递推最小二乘法的原理递推最小二乘法是一种迭代方法,通过不断更新参数来逼近最优解。
其原理可以简单描述为以下几个步骤:1. 初始化参数:首先需要初始化参数向量,通常可以使用随机数或者某些先验知识来确定初始参数值。
2. 迭代更新:接下来进入迭代更新阶段,根据当前参数值和观测数据,更新参数向量以降低误差。
3. 判断停止条件:迭代更新的过程中需要设立停止条件,当满足某个条件时停止迭代,可以是达到一定的迭代次数或者参数变化小于某个阈值等。
三、matlab编写递推最小二乘法函数在matlab中,编写递推最小二乘法函数可以通过以下步骤实现:1. 编写初始化函数:首先需要编写一个初始化函数来初始化参数向量,该函数可以接受观测数据和模型的输入,并返回初始参数向量。
2. 编写更新函数:接下来需要编写一个更新函数来进行参数的迭代更新,该函数也可以接受观测数据和当前参数向量的输入,并返回更新后的参数向量。
3. 编写停止条件函数:最后需要编写一个停止条件函数来判断迭代是否应该停止,该函数可以接受当前参数向量和更新前的参数向量的输入,并返回是否停止的逻辑值。
四、matlab递推最小二乘法函数的应用递推最小二乘法函数在matlab中的应用非常广泛,特别是在参数估计、信号处理、系统识别等领域。
通过使用递推最小二乘法函数,可以快速准确地估计出模型参数,从而提高算法的精度和效率。
由于递推最小二乘法具有较好的收敛性和稳定性,因此在实际工程中也得到了广泛的应用。
五、总结通过本文的介绍,读者可以了解到matlab中递推最小二乘法函数的编写和应用。
递推最小二乘法作为一种迭代方法,能够快速准确地估计出模型参数,并在各种工程领域中得到了广泛的应用。
最小二乘法MATLAB程序及结果

最小二乘递推算法的MATLAB仿真针对辨识模型,有z(k)-+a1*z(k-1)+a2*z(k-2)=b1*u(k-1)+b2*u(k-2)+v(k)模型结构,对其进行最小二乘递推算法的MATLAB仿真,对比真值与估计值。
更改a1、a2、b1、b2参数,观察结果。
仿真对象:z(k)-1.5*z(k-1)+0.7*z(k-2)=u(k-1)+0.5*u(k-2)+v(k)程序如下:L=15;y1=1;y2=1;y3=1;y4=0; %四个移位寄存器的初始值for i=1:L; %移位循环x1=xor(y3,y4);x2=y1;x3=y2;x4=y3;y(i)=y4; %取出作为输出信号,即M序列if y(i)>0.5,u(i)=-0.03; %输入信号else u(i)=0.03;endy1=x1;y2=x2;y3=x3;y4=x4;endfigure(1);stem(u),grid onz(2)=0;z(1)=0;for k=3:15;z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2); %输出采样信号endc0=[0.001 0.001 0.001 0.001]'; %直接给出被识别参数的初始值p0=10^6*eye(4,4); %直接给出初始状态P0E=0.000000005;c=[c0,zeros(4,14)];e=zeros(4,15);for k=3:15; %开始求kh1=[-z(k-1),-z(k-2),u(k-1),u(k-2)]';x=h1'*p0*h1+1;x1=inv(x);k1=p0*h1*x1; %开始求k的值d1=z(k)-h1'*c0;c1=c0+k1*d1;e1=c1-c0;e2=e1./c0; %求参数的相对变化e(:,k)=e2;c0=c1;c(:,k)=c1;p1=p0-k1*k1'*[h1'*p0*h1+1]; %求出P(k)的值p0=p1;if e2<=E break;endendc,e %显示被辨识参数及其误差情况a1=c(1,:);a2=c(2,:);b1=c(3,:);b2=c(4,:);ea1=e(1,:);ea2=e(2,:);eb1=e(3,:);eb2=e(4,:);figure(2);i=1:15;plot(i,a1,'r',i,a2,':',i,b1,'g',i,b2,':')title('Parameter Identification with Recursive Least Squares Method')figure(3);i=1:15;plot(i,ea1,'r',i,ea2,'g',i,eb1,'b',i,eb2,'r:')title('Identification Precision')程序运行结果:p0 =1000000 0 0 00 1000000 0 00 0 1000000 00 0 0 1000000c =Columns 1 through 90.0010 0 0.0010 -0.4984 -1.2325 -1.4951 -1.4962 -1.4991 -1.49980.0001 0 0.0001 0.0001 -0.2358 0.6912 0.6941 0.6990 0.69980.0010 0 0.2509 1.2497 1.0665 1.0017 1.0020 1.0002 0.99990.0010 0 -0.2489 0.7500 0.5668 0.5020 0.5016 0.5008 0.5002Columns 10 through 15-1.4999 -1.5000 -1.5000 -1.5000 -1.4999 -1.49990.6999 0.7000 0.7000 0.7000 0.7000 0.70000.9998 0.9999 0.9999 0.9999 0.9999 0.99990.5002 0.5000 0.5000 0.5000 0.5000 0.5000e =1.0e+003 *Columns 1 through 90 0 0 -0.4994 0.0015 0.0002 0.0000 0.0000 0.00000 0 0 0 -2.3592 -0.0039 0.0000 0.0000 0.00000 0 0.2499 0.0040 -0.0001 -0.0001 0.0000 -0.0000 -0.00000 0 -0.2499 -0.0040 -0.0002 -0.0001 -0.0000 -0.0000 -0.0000Columns 10 through 150.0000 0.0000 0.0000 -0.0000 -0.0000 0.00000.0000 0.0000 -0.0000 0.0000 0.0000 0.0000-0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000-0.0000 -0.0000 0.0000 -0.0000 0.0000 -0.0000程序运行曲线:图1.输入信号图2.a1,a2,b1,b2辨识仿真结果图3. a1,a2,b1,b2各次辨识结果收敛情况分析:由运行结果可看出,输出观测值没有任何噪声成分时,辨识结果最大相对误差达到3位数。
用Matlab作最小二乘及微分方程
用Matlab作最小二乘及微分方程用Matlab 作最小二乘曲线拟合已知?m m y y y y x x x x ......1010::,要用一个函数)(x f 来近似代表y ,此函数中含有几个待定参数n a a a ,...,,21,现在的任务是:确定参数的值,使得在节点处的总误差∑=-m i i i y x f 02))((达到最小。
用Matlab 计算:先按照)(x f 建立一个函数文件,文件第一句格式为:function f=文件名(参数组, 节点数组)再用下面命令格式:参数组=lsqcurvefit (‘函数文件名’,参数组初值,节点数组,函数值数组)例:对函数C=C(t)测量得下面一组数据:t : 1 2 3 4 5 6 7 8 9C :4.54, 4.99, 5.35, 5.65, 5.90, 6.10, 6.26, 6.39, 6.50用函数x a e a a y 321-+=作拟合,并画图显示拟合效果,给出节点处总误差。
先建立并保存函数文件:文件名syp78hswj 内容为:function f=syp78hswj(a,x0)f=a(1)+a(2)*exp(-a(3)*x0);再下面主程序:clearhold onx0=1:9;y0=[4.54,4.99,5.35,5.65,5.90,6.10,6.26,6.39,6.50];for i=1:9plot(x0(i),y0(i),'+')endcscz=[1,1,1];a=lsqcurvefit('syp78hswj',cscz,x0,y0)x=0:0.2:10;f=syp78hswj(a,x);plot(x,f)f=syp78hswj(a,x0);wc=sqrt(sum((f-y0).^2))hold off执行得:)2031.0,9911.2,9805.6(),,(321-=a a a 节点处总误差wc=0.0076 题1: bn an t +=2求 a=? b=?t 0 20 40 60 80 100 120 140 160 183.5n 0 1153 2045 2800 3466 4068 4621 5135 5619 6152答案:,1051.26-?=a .1044.12-?=b题2: ct be a C -+= 求 a=? b=? c=? 节点处总误差=?t : 1 2 3 4 5 6 7 8 9 10C :4.54,4.99,5.35,5.65,5.90,6.10,6.26,6.39,6.50,6.59 .答案:a=6.9811, b= -2.9918, c=0.2031 节点处总误差=0.0077 微分方程数值解 ??=≤≤-=.1)0(,10,2y x y x y dx dy 现以步长h=0.1求数值解:先建立“函数M —文件”:function f=eqs1(x,y)f=y-2*x/y;将此函数文件,以文件名eqs2保存.再命令:格式为: [自变量,因变量]=ode45(‘函数文件名’,节点数组,初始值) 命令为: [x,y]=ode45('eqs1',0:0.1:1,1)==+-='≤≤-+='.3.0)0(,2.0)0(,2sin ,10,2cos 21212211y y y y x y x y y x y 只须向量化,即可用前面方法:function f=eqs2(x,y)f=[cos(x)+2*y(1)-y(2);sin(x)-y(1)+2*y(2)];将此函数文件以文件名eqs2保存后,再下命令:[x,y]=ode45('eqs2',0:0.1:1,[0.2;0.3]) (注:输出的y 是矩阵,第i 列为函数i y 的数值解)要画图,就命令plot(x,y(:,1)), 及命令plot(x,y(:,2))22))10(9())20(16()20(161)(-+---?='X Y Y t X 22))10(9())20(16()10(91)(-+--?='X Y X t Y 22))()(())()(()()()(t y t Y t x t X t x t X w t x -+--?='22))()(())()(()()()(t y t Y t x t X t y t Y w t y -+--?='X (0)=30 , Y (0)=20 . x (0)=0 , y (0)=0 .当w =20时,function f=eqseqs20(t,y)w=20;aa=-16*(y(2)-20);bb=9*(y(1)-10);fm=sqrt(aa^2+bb^2);cc=y(1)-y(3);dd=y(2)-y(4);fm2= sqrt(cc^2+dd^2);f=[aa/fm;bb/fm;w*cc/fm2;w*dd/fm2];将此函数文件,以文件名eqseqs20保存后,再下命令:[t,y]=ode45('eqseqs20',0:0.1:1,[30;20;0;0])(注:输出y 是矩阵,第1、2、3、4列分别为函数X(t)、Y(t)、x(t)、y(t) 的数值解)要画图,继续命令:hold on,plot(y(:,1),y(:,2)),grid,plot(y(:,3),y(:,4)),hold off结果:当人速=1 狗速=20 时 t=1.9秒追击到。
matlab最小二乘法
---------------------------------------------------------------最新资料推荐------------------------------------------------------matlab最小二乘法4. 设某物理量 Y 与 X 满足关系式 Y=aX2 +bX+c,实验获得一批数据如下表,试辨识模型参数 a,b 和 c 。
(50 分) X 1.01 2.03 3.02 4.01 5 6.02 7.03 8.04 9.03 10 Y 9.6 4.1 1.3 0.4 0.05 0.1 0.7 1.8 3.8 9.0 报告要求:要有问题描述、参数估计原理、程序流程图、程序清单,最后给出结果及分析。
(1)问题描述:由题意知,这是一个已知模型为 Y=aX2 +bX+c,给出了 10 组实验输入输出数据,要求对模型参数 a,b,c 进行辨识。
这里对该模型参数辨识采用递推最小二乘法。
(2)参数估计原理对该模型参数辨识采用递推最小二乘法,即 RLS( recurisive least square ),它是一种能够对模型参数进行在线实时估计的辨识方法。
其基本思想可以概括为:新的估计值 ) (k =旧的估计值 ) 1 ( k +修正项下面将批处理最小二乘法改写为递推形式即递推最小二乘参数估计的计算方法。
批处理最小二乘估计为 YT T =1) ( ,,设 k 时刻的批处理最小二乘估计为:kTk kTkY =1) ( 令1 1 1)] 1 ( ) ( ) 1 ( [ ) ( ) ( + = = k k k P k PTkTkϕϕ K 时刻的最小二乘估计可以表示为 kTkY1 / 5k P k = ) ( ) ( = )] ( ) ( )[ (1 1k y k Y k PkTkϕ+ = )]1 () ( ) ( )[ ( ) 1 ( + k k k y k K kT ϕ;式中 ) ( ) ( )( k k P k K ϕ = ,因为要推导出 P(k)和 K(k)的递推方程,因此这里介绍一下矩阵求逆引理:设 A、(A+BC)和(I+ B CA1 )均为非奇异方阵,则1 1 1 1 1 1)( ) ( + = + CA B CA I B A A BC A 通过运用矩阵求逆引理,把复杂的矩阵求逆转化为标量求倒数,大大减小了计算量。
最小二乘法拟合圆公式推导及matlab实现

2009-01-17 | 最小二乘法拟合圆公式推导及matlab实现最小二乘法(least squares analysis)是一种数学优化技术,它通过最小化误差的平方和找到一组数据的最佳函数匹配。
最小二乘法是用最简的方法求得一些绝对不可知的真值,而令误差平方之和为最小。
最小二乘法通常用于曲线拟合(least squares fitting) 。
这里有拟合圆曲线的公式推导过程和vc实现。
matlab 实现:function[R,A,B]=irc(x,y,N)%x,y是平面点的坐标,N是点个数%R是拟合半径,A,B是圆心的平面坐标x1=0;x2=0;x3=0;y1=0;y2=0;y3=0;x1y1=0;x1y2=0;x2y1=0;for i=1:Nx1=x1+x(i);x2=x2+x(i)*x(i);x3=x3+x(i)*x(i)*x(i);y1=y1+y(i);y2=y2+y(i)*y(i);y3=y3+y(i)*y(i)*y(i);x1y1=x1y1+x(i)*y(i);x1y2=x1y2+x(i)*y(i)*y(i);x2y1=x2y1+x(i)*x(i)*y(i);endC=N*x2-x1*x1;D=N*x1y1-x1*y1;E=N*x3+N*x1y2-(x2+y2)*x1;G=N*y2-y1*y1;H=N*x2y1+N*y3-(x2+y2)*y1;a=(H*D-E*G)/(C*G-D*D);b=(H*C-E*D)/(D*D-G*C);c=-(a*x1+b*y1+x2+y2)/N;A=a/(-2);B=b/(-2);R=sqrt(a*a+b*b-4*c)/2;VCvoid CViewActionImageTool::LeastSquaresFitting() {if (m_nNum<3){ return; }int i=0;double X1=0;double Y1=0;double X2=0;double Y2=0;double X3=0;double Y3=0;double X1Y1=0;double X1Y2=0;double X2Y1=0;for (i=0;i<m_nNum;i++){X1 = X1 + m_points[i].x;Y1 = Y1 + m_points[i].y;X2 = X2 + m_points[i].x*m_points[i].x;Y2 = Y2 + m_points[i].y*m_points[i].y;X3 = X3 + m_points[i].x*m_points[i].x*m_points[i].x;Y3 = Y3 + m_points[i].y*m_points[i].y*m_points[i].y;X1Y1 = X1Y1 + m_points[i].x*m_points[i].y;X1Y2 = X1Y2 + m_points[i].x*m_points[i].y*m_points[i].y;X2Y1 = X2Y1 + m_points[i].x*m_points[i].x*m_points[i].y; }double C,D,E,G,H,N;double a,b,c;N = m_nNum;C = N*X2 - X1*X1;D = N*X1Y1 - X1*Y1;E = N*X3 + N*X1Y2 - (X2+Y2)*X1;G = N*Y2 - Y1*Y1;H = N*X2Y1 + N*Y3 - (X2+Y2)*Y1;a = (H*D-E*G)/(C*G-D*D);b = (H*C-E*D)/(D*D-G*C);c = -(a*X1 + b*Y1 + X2 + Y2)/N;double A,B,R;A = a/(-2);B = b/(-2);R = sqrt(a*a+b*b-4*c)/2;m_fCenterX = A;m_fCenterY = B;m_fRadius = R; return;}。
参数估计的递归最小二乘法matlab程序

参数估计的递归最小二乘法matlab程序
下面是一个用于参数估计的递归最小二乘法的Matlab程序:
```matlab
function [theta_hat, P] = recursive_least_squares(y, u) N = length(y); % 数据点个数
lambda = 0.99; % 遗忘系数
P = eye(length(u)); % 初始化P矩阵
theta_hat = zeros(length(u), 1); % 初始化参数向量
for k = 1:N
phi = u(k,:)'; % 转置u(k)为列向量
epsilon = y(k) - phi' * theta_hat; % 残差
K = (P * phi) / (lambda + phi' * P * phi); % 计算增益
theta_hat = theta_hat + K * epsilon; % 更新参数向量
P = (eye(length(u)) - K * phi') * P / lambda; % 更新协方差矩阵
end
end
```
该程序实现了递归最小二乘法(RLS)用于参数估计。
其中`y`是输入信号,`u`是扰动信号。
函数计算得到的`theta_hat`是参数向量的估计值,`P`是参数估计的协方差矩阵。
请注意,本程序仅供参考,并不保证其完整性和正确性。
使用时请自行验证和调整代码。
用matlab实现最小二乘递推算法辨识系统参数
自动化专业综合设计报告设计题目:最小二乘递推算法辨识系统参数所在实验室:自动化系统仿真实验室指导教师:学生姓名班级计082-2 班学号撰写时间:2012-3-1 成绩评定:一.设计目的1、学会用Matlab实现最小二乘法辨识系统参数。
2、进一步熟悉Matlab的界面及基本操作;3、了解并掌握Matlab中一些函数的作用与使用;二.设计要求最小二乘递推算法辨识系统参数,利用matlab编程实现,设初始参数为零。
z(k)-1.5*z(k-1)+0.7*z(k-2)=1*u(k-1)+0.5*u(k-2)+v(k);选择如下形式的辨识模型:z(k)+a1*z(k-1)+a2*z(k-2)=b1*u(k-1)+b2*u(k-2)+v(k);三.实验程序m= 3;N=100;uk=rand(1,N);for i=1:Nuk(i)=uk(i)*(-1)^(i-1);endyk=zeros(1,N);for k=3:Nyk(k)=1.5*yk(k-1)-0.7*yk(k-2)+uk(k-1)+0.5*uk(k-2);end%j=100;kn=0;%y=yk(m:j)';%psi=[yk(m-1:j-1);yk(m-2:j-2);uk(m-1:j-1);uk(m-2:j-2)]';%pn=inv(psi'*psi);%theta=(inv(psi'*psi)*psi'*y);theta=[0;0;0;0];pn=10^6*eye(4);for t=3:Nps=([yk(t-1);yk(t-2);uk(t-1);uk(t-2)]);pn=pn-pn*ps*ps'*pn*(inv(1+ps'*pn*ps));theta=theta+pn*ps*(yk(t)-ps'*theta);thet=theta';a1=thet(1);a2=thet(2);b1=thet(3);b2=thet(4);a1t(t)=a1;a2t(t)=a2;b1t(t)=b1;b2t(t)=b2;endt=1:N;plot(t,a1t(t),t,a2t(t),t,b1t(t),t,b2t(t));text(20,1.47,'a1');text(20,-0.67,'a2');text(20,0.97,'b1');text(20,0.47,'b2');四.设计实验结果及分析实验结果图:仿真结果表明,大约递推到第十步时,参数辨识的结果基本到稳态状态,即a1= 1.5999,b1=1,c1=0.5,d1=-0.7。
5.递推最小二乘法程序
5. 最小二乘参数的递推算法根据递推公式用循环实现递增。
如果满足所要求的精度,则跳出循环。
递推公式如下:)ˆ)1((ˆˆT 11θw K θθ⨯-++=++NN N N N z 1T 1))(1()(-++=N N N N N N w P w w P K))(1/()()()()1(T T N N N N N N N N N w P w P w w P P P +-=+源程序为:“ls.dsw ” 。
输入信号M 序列存在数据文件“data1.txt ”中 ,均值为0,方差为0.1的高斯白噪声存在数据文件“data2.txt ”中 。
估计结果存在数据文件“data3.txt ”中。
源程序:math.h"#include "stdio.h"#include "brmul.c"#include "brinv.c"int main(){FILE *fp1,*fp2,*fp;int u[600]; double v[600];int i, j, k, count;double y1[4][1],y[510],y2[1][1];double t1[4][1],t2[1][4],t3[1][1],t5[4][4],t6[4][4];double o[4][1], o1[500][4], w[4][1], w1[1][4];double p[4][4], km[4][1], er[4][1];double maxe;t3[0][0] = 0.0;y2[0][0] = 0.0;fp1 = fopen("data1.txt","r");fp2 = fopen("data2.txt","r");for( i = 0; i < 600; i++ ){fscanf(fp1,"%d",&u[i]);//输入信号M 序列fscanf(fp2,"%lf",&v[i]);//均值为0,方差为0.1的白噪声}fclose(fp1);fclose(fp2);y[0] = v[0];y[1] = v[1]; for( i = 2; i < 510; i++ )y[i] = 1.5*y[i-1]-0.7*y[i-2]+u[i-1]+0.5*u[i-2]+v[i];y1[0][0] = -1.5;y1[1][0] = 0.7;y1[2][0] = 1.0;y1[3][0] = 0.5;for( i = 0; i < 4; i++ ) o[i][0] = 0;for( i = 0; i < 4; i++ )for( j = 0; j < 4;j++ ){if( i == j ) p[i][j] = 1000000;else p[i][j] = 0;}for( k = 0; k < 500; k++ ){for( i = 0; i < 2; i++ ) w[i][0] = w1[0][i] = -y[1-i+k];for( i = 2; i < 4; i++ ) w[i][0] = w1[0][i] = u[3-i+k];brmul(p,w,4,4,1,t1);brmul(w1,p,1,4,4,t2);brmul(t2,w,1,4,1,t3);for( i = 0; i < 4; i++ ) km[i][0] = t1[i][0]/(1+t3[0][0]);brmul(w1,o,1,4,1,y2);for( i = 0; i < 4; i++ ) o[i][0] = o[i][0] + km[i][0]*(y[k+2] - y2[0][0]);brmul(t1,w1,4,1,4,t5);brmul(t5,p,4,4,4,t6);for( i = 0; i < 4; i++ )for( j = 0; j < 4; j++ ) p[i][j] = p[i][j] - t6[i][j]/(1+t3[0][0]);for ( i = 0; i < 4; i++ ) o1[k][i] = o[i][0];maxe = 0;for( i = 0; i < 4; i++ ){er[i][0] = fabs((o[i][0] - y1[i][0])/y1[i][0]);maxe = max( er[i][0], maxe );}count = k;if( maxe < 0.01 ) break;}fp = fopen("Data3.txt","w");fprintf(fp,"a0\t\ta1\t\tb0\t\tb1\n");for( i = 0; i < count+1; i++ ){fprintf(fp,"%f\t%f\t%f\t%f\n",o1[i][0],o1[i][1],o1[i][2],o1[i][3]);}fclose(fp);return 0; }。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
k1=p0*h1*x1;%求出K的值
d1=z(k)-h1'*c0; c1=c0+k1*d1; %求被辨识参数c
e1=c1-c0; %求参数当前值与上一次的值的差值
p0=10^6*eye(4,4); %直接给出初始状态P0,即一个充分大的实数单位矩阵
E=0.000000005; %取相对误差E=0.000000005
c=[c0,zeros(4,15)]; %被辨识参数矩阵的初始值及大小
e=zeros(4,L); %相对误差的初始值及大小
for k=3:L; %开始求K
e2=e1./c0; %求参数的相对变化
e(:,k)=e2; %把当前相对变化的列向量加入误差矩阵的最后一列 ቤተ መጻሕፍቲ ባይዱ
c0=c1; %新获得的参数作为下一次递推的旧参数
c(:,k)=c1; %把辨识参数c 列向量加入辨识参数矩阵的最后一列
p1=p0-k1*k1'*[h1'*p0*h1+1]; %求出 p(k)的值
else u(i)=1; %如果M序列的值为"0", 辨识的输入信号取“0.03”
end %小循环结束
y1=x1;y2=x2;y3=x3;y4=x4; %为下一次的输入信号做准备
end %大循环结束,产生输入信号u
z(2)=0;z(1)=0; %设z的前两个初始值为零
p0=p1; %给下次用
if e2<=E break; %如果参数收敛情况满足要求,终止计算
end %小循环结束
end %大循环结束
c
%分离参数
a1=c(1,:); a2=c(2,:); b1=c(3,:); b2=c(4,:);
[N,M]=size(c);
figure(1); %第二个图形
gtext('\leftarrowa1')
gtext('\leftarrowa2')
gtext('\downarrowb1')
gtext('\uparrowb2')
x3=y2; %第三个移位寄存器的输入是第二个移位寄存器的输出
x4=y3; %第四个移位寄存器的输入是第三个移位寄存器的输出
y(i)=y4; %取出第四个移位寄存器的幅值为"0"和"1"的输出信号,即M序列
if y(i)>0.5,u(i)=-1; %如果M序列的值为"1", 辨识的输入信号取“-0.03”
i=1:M; %横坐标从1到15
plot(i,a1,'r',i,a2,':',i,b1,'g',i,b2,':') %画出a1,a2,b1,b2的各次辨识结果
title('Parameter Identification with Recursive Least Squares Method') %图形标题
clear %清理工作间变量
L=502; % M序列的周期
y1=1;y2=1;y3=1;y4=0; %四个移位寄存器的输出初始值
for i=1:L;%开始循环,长度为L
x1=xor(y3,y4); %第一个移位寄存器的输入是第三个与第四个移位寄存器的输出的“或”
x2=y1; %第二个移位寄存器的输入是第一个移位寄存器的输出
randn('seed',0)
a=0.1*randn(L,1);
for k=3:L; %循环变量从3到15
z(k)=1*z(k-1)-0.632*z(k-2)+0.638*u(k-1)+0.264*u(k-2); %输出采样信号
end
c0=[0.001 0.001 0.001 0.001]'; %直接给出被辨识参数的初始值,即一个充分小的实向量