变形监测+数据整理+数据编制+科傻平差
关子岭导线科傻数据整理(小里程)-rt2
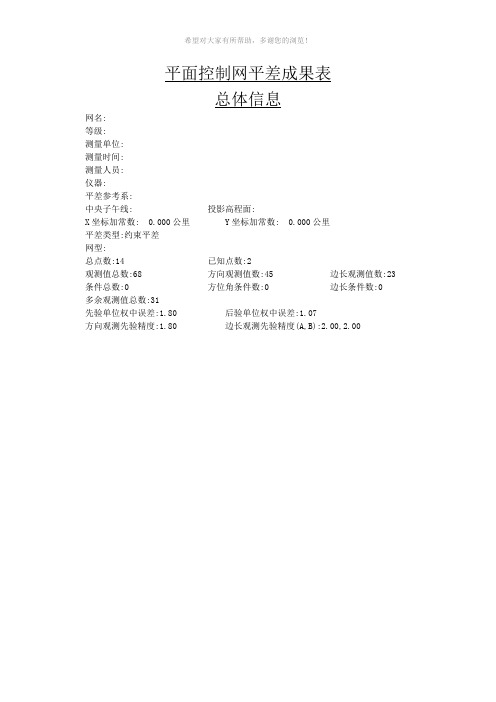
平面控制网平差成果表总体信息网名:等级:测量单位:测量时间:测量人员:仪器:平差参考系:中央子午线: 投影高程面:X坐标加常数: 0.000公里Y坐标加常数: 0.000公里平差类型:约束平差网型:总点数:14 已知点数:2观测值总数:68 方向观测值数:45 边长观测值数:23条件总数:0 方位角条件数:0 边长条件数:0多余观测值总数:31先验单位权中误差:1.80 后验单位权中误差:1.07方向观测先验精度:1.80 边长观测先验精度(A,B):2.00,2.00坐标平差值及其精度成果表点名点号坐标 (米)点位误差(厘米)X Y Mx My MpGH1GH13646276.913451767.8910CPI162CPI1623646259.2402452185.8050GH4GH43646300.6771452167.05830.4320.1260.450 GH4-1GH4-13646304.8594452176.35170.4420.1270.460GH6GH63646333.8806452368.31280.6610.1530.678GH6-1GH6-13646345.7941452413.08090.7160.1610.734 GZL1GZL13646388.3872452647.3722 1.0210.210 1.043GZL1-1GZL1-13646389.8076452655.1356 1.0320.211 1.053 GZL6GZL63646535.8552452450.71000.7740.3980.870 GZL6-1GZL6-13646539.2386452439.89510.7610.4030.861GZL8GZL83646673.545452281.11750.6180.6070.866GZL8-1GZL8-13646674.4141452275.56320.6140.6090.865 GZL10GZL103646834.8352452109.06500.5880.876 1.055 GZL10-1GZL10-13646822.6008452114.73300.5860.855 1.037方位角边长平差值及其精度成果表起点终点方位角中误差边长中误差相对中误差A(度.分秒)Ma(秒)S(米)Ms(厘米)S/MsGH1GH4-186.050956 2.23409.41560.12331000 GH1GH486.353466 2.23399.87410.12324000 GH4GH1266.353466 2.23399.87410.12324000 GH4GH6-179.362971 2.80250.12520.11232000 GH4GH680.375371 2.83203.97510.11190000 GH4-1GH6-180.112240 2.81240.24220.11223000 GH4-1GH681.241071 2.84194.14250.11181000 GH4-1GH1266.050956 2.23409.41560.12331000 GH6GH4260.375371 2.83203.97510.11190000 GH6GH4-1261.241071 2.84194.14250.11181000 GH6GZL178.565275 3.03284.33270.11269000 GH6GZL1-178.575924 3.03292.22450.11276000 GH6-1GZL1-179.413962 3.09246.02380.11234000 GH6-1GZL179.414706 3.10238.13150.10227000 GH6-1GH4259.362971 2.80250.12520.11232000 GH6-1GH4-1260.112240 2.81240.24220.11223000 GZL1GZL6-1306.011182 3.32256.52070.11243000 GZL1GZL6306.515242 3.32245.81060.11233000 GZL1GH6258.565275 3.03284.33270.11269000 GZL1GH6-1259.414706 3.10238.13150.10227000 GZL1-1GH6258.575924 3.03292.22450.11276000 GZL1-1GH6-1259.413962 3.09246.02380.11234000 GZL1-1GZL6-1304.461326 3.31262.02690.11249000 GZL1-1GZL6305.323523 3.32251.23650.11238000 GZL6GZL8-1308.205126 3.54223.32700.10218000 GZL6GZL8309.042161 3.54218.44930.10213000 GZL6GZL1-1125.323523 3.32251.23650.11238000 GZL6GZL1126.515242 3.32245.81060.11233000 GZL6-1GZL1126.011182 3.32256.52070.11243000 GZL6-1GZL8-1309.262369 3.55212.78490.10208000 GZL6-1GZL8310.133775 3.55207.96280.10203000 GZL6-1GZL1-1124.461326 3.31262.02690.11249000 GZL8GZL6129.042161 3.54218.44930.10213000 GZL8GZL6-1130.133775 3.55207.96280.10203000 GZL8GZL10-1311.512022 3.84223.38630.11195000 GZL8GZL10313.090284 3.84235.83170.11205000 GZL8-1GZL10-1312.392535 3.85218.69070.11191000 GZL8-1GZL10313.560621 3.84231.20680.11202000 GZL8-1GZL6128.205126 3.54223.32700.10218000GZL8-1GZL6-1129.262369 3.55212.78490.10208000 GZL10GZL8133.090284 3.84235.83170.11205000 GZL10GZL8-1133.560621 3.84231.20680.11202000 GZL10-1GZL8131.512022 3.84223.38630.11195000 GZL10-1GZL8-1132.392535 3.85218.69070.11191000方向观测值及其平差成果表测站点号照准点号方向观测值改正数方向平差值中误差Nc Nz(度.分秒)(秒)(度.分秒)ml(秒) GH1CPI1620.0000000.000.000000 1.80 GH1GH4-1353.3951750.45353.395220 1.80 GH1GH4354.101775-0.45354.101730 1.80 GH4GH10.0000000.830.000083 1.80 GH4GH6-1173.0055670.21173.005588 1.80 GH4GH6174.022092-1.04174.021988 1.80 GH4-1GH6-10.0000000.510.000051 1.80 GH4-1GH6 1.1248500.32 1.124882 1.80 GH4-1GH1185.534850-0.84185.534766 1.80 GH6GH40.000000 1.020.000102 1.80 GH6GH4-10.461942-1.390.461803 1.80 GH6GZL1178.1859750.31178.190006 1.80 GH6GZL1-1178.2006500.06178.200656 1.80 GH6-1GZL1-10.000000 1.170.000117 1.80 GH6-1GZL10.001042-1.800.000862 1.80 GH6-1GH4179.5451250.01179.545126 1.80 GH6-1GH4-1180.2943330.63180.294396 1.80 GZL1GZL6-10.0000000.280.000028 1.80 GZL1GZL60.5040830.050.504088 1.80 GZL1GH6312.554258-1.37312.554121 1.80 GZL1GH6-1313.403450 1.03313.403553 1.80 GZL1-1GH60.000000-0.62-0.000062 1.80 GZL1-1GH6-10.433875 1.010.433976 1.80 GZL1-1GZL6-145.481358-0.1845.481340 1.80 GZL1-1GZL646.343558-0.2146.343537 1.80 GZL6GZL8-10.000000-0.12-0.000012 1.80 GZL6GZL80.4329580.650.433023 1.80 GZL6GZL1-1177.114483-0.98177.114385 1.80 GZL6GZL1178.3100580.46178.310104 1.80 GZL6-1GZL10.0000000.560.000056 1.80 GZL6-1GZL8-1183.251358-1.15183.251243 1.80 GZL6-1GZL8184.1225920.58184.122650 1.80 GZL6-1GZL1-1358.4502000.01358.450201 1.80 GZL8GZL60.000000-0.55-0.000055 1.80 GZL8GZL6-1 1.0915080.50 1.091558 1.80 GZL8GZL10-1182.465808-0.03182.465805 1.80 GZL8GZL10184.0440580.09184.044067 1.80 GZL8-1GZL10-10.0000000.050.000005 1.80 GZL8-1GZL10 1.164100-0.08 1.164092 1.80GZL8-1GZL6175.412650-0.54175.412596 1.80 GZL8-1GZL6-1176.4657830.56176.465840 1.80 GZL10GZL80.0000000.320.000032 1.80 GZL10GZL8-10.470400-0.320.470368 1.80 GZL10-1GZL80.0000000.900.000090 1.80 GZL10-1GZL8-10.480694-0.900.480603 1.80边长观测值及其平差成果表测站点号照准点号边长观测值改正数边长平差值中误差Nc Nz(米)(厘米)(米)(厘米) GH1CPI162418.29160-0.409418.287510.217 GH1GH4-1409.415400.023409.415630.153 GH1GH4399.87430-0.023399.874070.152 GH4GH6-1250.12530-0.006250.125240.146 GH4GH6203.97530-0.017203.975130.144 GH4-1GH6-1240.241900.034240.242240.145 GH4-1GH6194.14260-0.013194.142470.144 GH6GZL1284.33280-0.007284.332730.147 GH6GZL1-1292.22470-0.020292.224500.147 GH6-1GZL1-1246.023700.010246.023800.146 GH6-1GZL1238.131300.019238.131490.145 GZL1GZL6-1256.520200.053256.520730.146 GZL1GZL6245.810500.009245.810590.146 GZL1-1GZL6-1262.02700-0.007262.026930.146 GZL1-1GZL6251.23700-0.053251.236470.146 GZL6GZL8-1223.32726-0.022223.327040.145 GZL6GZL8218.44951-0.024218.449270.145 GZL6-1GZL8-1212.784720.016212.784880.145 GZL6-1GZL8207.962520.032207.962840.144 GZL8GZL10-1223.386210.007223.386280.145 GZL8GZL10235.831650.004235.831690.145 GZL8-1GZL10-1218.69081-0.007218.690730.145 GZL8-1GZL10231.20679-0.004231.206750.145(注:可编辑下载,若有不当之处,请指正,谢谢!)。
三维变形监测处理方案-百度发表文章

三维变形监测-后处理解决方案一. 项目概况测区: 某小型水电站时间: 2014年1月13日海拔高度: 2000米测量仪器: 徕卡TS30技术参数: 0.5〃 1+1ppm季节: 冬季室外温度: 2-8摄氏度(干湿温度计)气压: 846mba (精密气压计)控制点: 3个(TL01 TL02 TL03) TL01为复核点监测点: 4个(TP01 TP03 TP05 TP07)测点局部被损坏/临时遮挡目标:墩+强制型对中盘采用对中螺丝+基座棱镜组,由于基座使用的磨损墩上对中盘的自然侵蚀,所以量取每个目标高都不一样,就很正常采集软件:徕卡机载三维变形监测软件可任意设站采集边角数据(本次采用)多测回测角中国版可任意设站,采集边角数据多测回测角国际版区别极坐标可直接察看坐标值(未精密平差)测回数:一共2个测站每测站9测回数TL02测站09:17:33am 开始测量(气压为846mba 干温2℃湿温1.5℃) TL03测站11:33:32am 开始测量(气压为846mba 干温8℃湿温6.5℃)其它参数:折光系数选取 0.13/0.14 (考虑到山区,冬季本次采用0.13)地球曲率半径标准为6371000米(本次特殊,使用的是6366358)投影面高程本次采用 1996米处理方法:外业数据采集导出原始数据tpt txt tzt文件导入DAM6.0平差处理EDM设置:除棱镜常数-34.4采用外(leica仪器直接选用圆棱镜),其余气象均不改正(PPM=0)。
所有改正在软件内部完成过程描述:第一站全站仪架站TL02-以TL03定向-学习-采集(记录气象数据)第二站全站仪架站TL03-以TL02定向-学习-采集(记录气象数据)本次采用软件:格式转换+中铁一院地面通用控制处理包 /科傻/四院/二院相关软件控制网点位图:控制点已知坐标TL02,153.4613,188.2105,2018.1597 TL03,81.2320,22.4400,1991.5280 TL01,68.1052,199.1692,2016.0374外业记录信息检定证书相关值二. 仪器设置 (leica为例) 输出文件格式设置为TXT三. 后处理过程 (转换后)测量机器人TPT TXT TZT 原始数据后处理平差作业流程➢利用转换工具(该软件支持仪器高目标高棱镜常数的事后录入 ), 整理出每一个测站SUC格式文件的数据,以待备用。
建筑物变形监测的测量仪器和数据处理方法
建筑物变形监测的测量仪器和数据处理方法随着城市化进程的不断加快,建筑物的数量和规模也随之增加。
然而,建筑物的变形问题是一个不可忽视的因素,它直接关系到建筑物的安全性和稳定性。
因此,建筑物变形监测变得十分重要。
本文将介绍几种常用的建筑物变形监测的测量仪器和数据处理方法。
首先,我们来介绍激光测距仪,这是一种常用的建筑物变形监测仪器。
激光测距仪通过发射激光脉冲并测量其被物体反射后的时间来计算物体到装置的距离。
它具有高精度、快速、非接触等优点。
在建筑物变形监测中,激光测距仪常用于测量建筑物的位移、挠度等参数,以实时掌握建筑物的变形情况。
其次,我们来介绍全站仪。
全站仪是一种集高精度测距、定位、定向和测角于一体的测量仪器。
在建筑物变形监测中,全站仪常用于测量建筑物各个关键点的坐标。
全站仪通过发射和接收红外光束,可以得到建筑物各个关键点的三维坐标,从而实现对建筑物变形的全面监测。
除了仪器的选择外,数据处理也是建筑物变形监测的关键一环。
在测量得到的原始数据基础上,需要进行合理的数据处理,以提取有用的变形信息。
数据处理方法有很多种,下面我们介绍两种常用的方法。
第一种方法是平差法。
平差法是一种常用的数据处理方法,通过最小二乘法对观测数据进行处理,以获得建筑物变形参数的最佳估计值。
平差法可以综合考虑各个观测量之间的相互关系,提高数据处理的精度和可靠性。
第二种方法是滤波算法。
滤波算法是一种广泛应用于信号处理领域的数据处理方法。
在建筑物变形监测中,滤波算法可以用来对原始数据进行平滑处理,去除噪声和杂散信号,从而提取出建筑物变形的真实特征。
常用的滤波算法有卡尔曼滤波、无损滤波等。
除了上述介绍的测量仪器和数据处理方法外,建筑物变形监测还可以结合其他技术手段进行,以提高监测的精度和可靠性。
例如,可以利用摄影测量技术对建筑物的变形进行监测,或者结合GPS技术进行建筑物变形的动态监测。
总之,建筑物变形监测是建筑工程中不可或缺的环节。
高精度地面变形监测技术的操作方法与数据分析
高精度地面变形监测技术的操作方法与数据分析地面变形监测技术是一种用于精确测量地面表面形变的应用技术。
它在土木工程、地质灾害预警、环境监测等领域中具有广泛的应用。
本文将介绍高精度地面变形监测技术的操作方法和数据分析过程。
一、高精度地面变形监测技术的操作方法1. 安装监测设备:在进行地面变形监测之前,首先需要选择合适的监测设备。
常用的设备包括全站仪、GNSS测量系统、激光扫描仪等。
根据监测目的和具体情况,选择适合的设备进行安装。
2. 建立监测网格:为了有效监测地面变形,需要在监测区域内建立监测网格。
监测网格的设置应该考虑地形地貌特点、监测目的以及监测设备的技术参数等因素。
一般情况下,监测网格的间距应该小于变形规律的空间尺度。
3. 进行测量观测:按照预先设定的监测网格,使用监测设备进行观测。
观测过程中,需要注意设备的稳定性和观测角度的准确性。
为了提高测量精度,可以采取多次观测并取平均值的方法。
4. 数据采集与处理:观测数据采集后,需要进行数据处理。
数据处理的方法多种多样,根据不同的情况选择合适的方法。
常用的数据处理方法包括数据平差、大地坐标系转换、变形分析等。
二、高精度地面变形监测数据的分析1. 数据预处理:在进行地面变形监测数据分析之前,需要对原始数据进行预处理。
这包括数据的格式化、异常数据的剔除、数据的去噪等步骤。
预处理的目的是减少数据误差,获得可靠的数据。
2. 数据分析方法选择:根据监测目的和数据特点,选择合适的数据分析方法。
常用的数据分析方法包括时间序列分析、空间插值分析、趋势分析等。
通过数据分析,可以了解地面变形的规律和趋势。
3. 变形分析:地面变形监测的主要目的是了解地面的变形情况。
通过变形分析,可以得出地面的变形量和变形速率等指标。
变形分析需要结合地质地貌特征和环境背景,综合考虑多方面因素进行判断和分析。
4. 结果评估与报告撰写:根据变形分析的结果,对监测数据进行评估。
评估的目的是判断监测数据的准确性和可靠性。
科傻软件教程 科傻说明书 科傻数据格式介绍 平差教程 教程
前言“地面测量工程控制与施工测量内外业一体化和数据处理自动化系统”(简称科傻系统)将测量基本原理和现代科技相结合,对电子全站仪、电子水准仪以及常规地面测量仪器进行系统的开发,以地面控制测量、施工测量和碎部测量等测量工程为对象,实现从外业数据采集、质量检核、预处理到内业数据处理、成果报表输出的一体化和自动化作业流程。
该系统由两个子系统组成:“基于掌上型电脑的测量数据采集和处理系统”(简称COSA-HC),在掌上型电脑RD-EB2上运行,能自动控制和引导整个作业过程并进行质量检测,一体化程度高,操作方便。
该子系统具有水准测量、二、三维控制、碎部测量、道路测设、工程放样等测量作业模块;具有小规模水准网、二、三维工程网的平差功能;具有文件管理和数据通信功能;该系统灵活方便,适合外业环境。
“地面测量工程控制测量数据处理通用软件包”(简称CODAPS或COSAWIN)在微机WINDOWS环境下运行即可独立使用,也可与COSA-HC 联合使用,对RD-EB2传输过来的原始观测数据进行转换,完成从概算到平差的数据自动化处理,同时具有粗差探测与剔除、方差分量估计、闭合差计算、贯通误差影响值估算、报表打印、网图显绘、坐标转换与换带计算、控制网优化设计以及叠置分析等功能。
本手册是为COSAWIN用户专门编写的,若有疏漏和不当之处,敬请读者提出宝贵意见和批评指正。
武汉测绘科技大学武地课题组2000.5.第一章概述1.1 系统简介科傻系统(COSA)是“地面测量工程控制与施工测量内外业一体化和数据处理自动化系统”的简称,包括COSAWIN和COSA-HC两个子系统。
COSAWIN在IBM兼容机上运行。
COSAWIN系统除具有概算、平差、精度评定及成果输出等功能外,还提供了许多实用的功能,如网图显绘、粗差剔除、方差分量估计、贯通误差影响值计算及闭合差计算等。
该系统不同于其它现有控制网平差系统的最大特点是自动化程度高,通用性强,处理速度快,解算容量大。
科傻平差in2数据格式

科傻平差in2数据格式科傻平差in2数据格式是一种常用的地形测量数据格式,它主要用于测量高程和坐标的精确度分析。
下面将从科傻平差in2数据格式的定义、特点、应用等方面进行全面详细的介绍。
一、科傻平差in2数据格式的定义科傻平差in2数据格式是一种基于文本文件的地形测量数据格式,以ASCII码方式存储。
它主要包括两个部分:头文件和数据文件。
头文件包含了该文件的相关信息,如单位、坐标系和高程系统等;而数据文件则包含了实际采集到的高程和坐标值。
二、科傻平差in2数据格式的特点1. 灵活性高:科傻平差in2数据格式支持多种不同单位、坐标系和高程系统,可以根据具体需求进行选择。
2. 数据精度高:科傻平差in2数据格式可以存储高精度的地形测量数据,可以达到亚厘米级别。
3. 数据量大:由于其存储方式为文本文件,因此相对于二进制存储方式来说,其文件大小较大。
4. 易读性好:由于其采用ASCII码存储方式,因此可以直接使用文本编辑器进行查看和编辑。
三、科傻平差in2数据格式的应用1. 地形测量:科傻平差in2数据格式是地形测量领域常用的数据格式之一,可以用于存储高程和坐标值,以及进行精度分析等。
2. 地图制图:科傻平差in2数据格式可以用于地图制图中的高程和坐标信息的存储和处理。
3. 工程建设:科傻平差in2数据格式可以在工程建设中用于测量、设计和施工等方面的应用。
4. 环境监测:科傻平差in2数据格式也可以用于环境监测领域,如水文、气象等方面的应用。
四、科傻平差in2数据格式的文件结构1. 头文件结构头文件包含了该文件的相关信息,如单位、坐标系和高程系统等。
其结构如下:$FILE_TYPE IN2$FILE_VERSION 01$UNIT METRIC$COORDINATE_SYSTEM UTM$EASTING 500000$NORTHING 0$ZONE 50$VERTICAL_DATUM EGM96其中,$FILE_TYPE表示文件类型;$FILE_VERSION表示文件版本;$UNIT表示单位;$COORDINATE_SYSTEM表示坐标系;$EASTING表示东向偏移量;$NORTHING表示北向偏移量;$ZONE 表示地带号;$VERTICAL_DATUM表示高程系统。
变形监测+数据整理+数据编制+科傻平差
变形监测+数据整理+数据编制+科傻平差概述:(一)全站仪可以测斜距、平距、角度,普通工作在要求不高时,我们可以直接用平距,但是一旦涉及导线等精密测量时,“平距”必须通过别的渠道进行改正得到(斜距改平或边长改正)(二)当测量任务涉及到变形监测、导线网、多测回测角等精密测量时,不少测工受制于仪器、或者相关后处理软件的制约(如建策Dam6.0 徕卡三维变形软件)、其“数据整理归纳”和“斜距改平”的工作难以推进,困惑不前。
(三)本文主要交流探讨:①徕卡tca2003、tcr1201、tm30、tm50、ts15/16、ts60等徕卡测量机器人的非官方软件多测回测角测量的外业采集及数据后处理平差替代方法。
②普通1″仪器(特指:无马达、无自动照准、无多测回测角)的外业测量-原始数据—整理—编制—科傻平差的流程作业。
(四)本文是关于:徕卡测量机器人和普通仪器对精密测量外业数据作用于后期数据平差的探讨和交流,交流指正(如测距仪的气象改正系数K1、K2)(五)仪器架设为控制点上(不用设站)采用全圆观测方法, (非极坐标方法)进行数据采集(仪器架设A点以B为0方向,观测其余待监测点C1/C2/C3.再以B测站点以A为0方向,观测其余待监测点C1/C2/C3)外业上不带入任何坐标,只采集边角数据。
内业用A/B的已知坐标,加入气象等条件后,通过软件解算得出C1/C2/C3坐标,可先做A/B/D为高等级控制网、再测量时候把D也测进去,用于复核(网形图片参考附件五)关键:全圆观测、变形监测、导线、网平差、边坡监测、三角高程平差难点:多测回测角、斜距化平、边长改正要点:(一)精密测量都是mm级别范畴、需要严谨的态度对待(注意:仪器对中精度、量取精度、温度、干湿、气压、成像条件等)(二)对变形监测、导线网、三角高程的外业数据采集步骤要有大致了解(三)明白“多测回测角”对于工作的重要性(四)关于“斜距化平”的突破(五)常用到的参数(大气折光系数K、地球曲率R、仪器加(乘)常数、温度℃、气压Pa 等)①仪器加(乘)常数通过该台仪器的检定证书查看如(常数主要是对测距改正)(加常数:K=-1.38mm 乘常数:R=1.78mm/km )②更严谨的会涉及到激光的波长、及频率、周期等③测距仪气象改正系数K1,K2公式(请百度:查阅全站仪距离气象改正与推导)(六)针对从非自动仪器,下载出原始数据进行编制及—Cosa进行平差,我们得掌握Cosa 的高程in1、平面in2及其斜距化平.SV 文件的编写、明白其具体含义. (七)适合无马达、无ATR的普通全站仪外业采集数据—整理外业—编制cosa.SV文件进行后处理。
如何使用测绘技术进行建筑物变形监测和分析

如何使用测绘技术进行建筑物变形监测和分析概述:建筑物变形监测和分析是测绘技术在工程建设中的一个重要应用领域。
通过测量建筑物的各种形变参数,既可以实时监测建筑物的稳定性和变形情况,也可以为后续的结构分析和评估提供数据支持。
本文将介绍如何使用测绘技术进行建筑物变形监测和分析。
一、测量基准的建立建筑物变形监测和分析需要首先建立一个稳定的测量基准。
常用的方法是采用全站仪或GPS测量技术进行高程控制和平面控制点的测量。
通过建立基准点网络,可以为后续的测量提供参考。
二、测量建筑物的形变参数在建筑物变形监测和分析中,常用的形变参数包括沉降、倾斜、位移等。
为测量这些参数,可以采用多种测量技术,如全站仪、GPS、激光测距仪等。
在测量时,应根据具体情况选择合适的测量方法和仪器,并进行多次测量以提高数据的可靠性。
三、数据处理和分析建筑物变形监测和分析的核心是数据处理和分析,通过对测量数据的处理和分析,可以得到建筑物的变形情况和趋势。
常用的数据处理和分析方法包括:1. 数据平差:对测量数据进行平差处理,剔除误差和异常值,得到更准确的数据。
2. 坐标变换:将测量数据转换到统一的坐标系下,便于比较和分析。
3. 变形分析:通过对测量数据的比较和分析,得出建筑物的变形情况和趋势。
常用的分析方法包括趋势分析、变形椭圆分析等。
4. 结构评估:根据变形数据和分析结果,对建筑物的结构进行评估,确定是否存在安全隐患。
四、监测方案的制定和实施在进行建筑物变形监测和分析前,需要制定监测方案,并根据方案实施监测。
监测方案应明确监测的目的、内容、时间、方法等,以确保监测数据的准确性和可靠性。
在监测实施过程中,应根据方案进行监测仪器的设置和测量数据的采集,同时应及时处理和分析监测数据,以便准确掌握建筑物的变形情况。
五、实时监测和预警建筑物的变形监测应具备实时性和预警功能,以便及时采取措施避免事故的发生。
现代测绘技术可以通过连续监测和数据传输,实时获取建筑物的变形数据,并结合预警模型和算法,对变形数据进行分析和判断。
测绘技术的变形监测数据处理方法探讨

测绘技术的变形监测数据处理方法探讨引言随着城市化进程的不断加快和建设项目的不断增多,对于地质变形监测的需求日益迫切。
测绘技术作为一种高效、精确的测量手段,在变形监测中发挥着重要作用。
本文将探讨测绘技术在变形监测中的数据处理方法,旨在提供一种指导和借鉴,使变形监测工作更加科学、准确。
高精度测量方法高精度测量是变形监测的关键环节。
在测绘技术中,常用的高精度测量方法有全站仪法、GPS法和激光扫描法等。
全站仪法通过测量角度和距离来获取地形表面的坐标信息,适用于小范围内的变形监测。
GPS法则适用于大范围变形监测,通过接收卫星信号来测量点的三维坐标。
激光扫描法则适用于复杂地形和建筑物等场景,通过激光扫描仪获取点云数据,再通过数据处理得到变形监测结果。
数据处理方法测绘技术中的数据处理方法主要包括数据分析与比对、变形监测模型建立和异常点识别等。
数据分析与比对是将实测数据与参考数据进行对比,判断变形情况的方法之一。
常见的方法有最小二乘法和差值法等。
最小二乘法通过最小化测量误差的平方和,拟合出变形监测数据的理论模型。
差值法则通过对测量值与参考值之间的差异进行计算,得到变形监测结果。
变形监测模型可以采用有限元模型、卡尔曼滤波模型等,根据实际情况选择合适的模型进行计算。
异常点识别是指通过数据处理方法,识别出可能存在的测量误差点。
常用的方法有3σ准则和Grubbs准则等。
通过对测量数据进行分析和比对,得到可靠的变形监测结果。
变形监测案例分析为了更好地理解和应用测绘技术的变形监测数据处理方法,我们将结合一个实际案例进行分析。
某市建设了一座地铁隧道,在施工过程中需要对隧道周围的房屋进行变形监测。
通过全站仪法进行测量,得到了一组监测数据。
首先,我们可以对数据进行预处理,包括数据剔除和平差处理等。
其次,应用数据处理方法进行分析和比对,得到变形情况。
最后,通过异常点识别,筛选出可能存在的异常测量点。
通过对变形监测数据的处理和分析,可以为地铁隧道的施工提供有力的监测结果和数据支持。
测绘技术中如何进行精密工程测量和变形监测的数据处理

测绘技术中如何进行精密工程测量和变形监测的数据处理测绘技术在现代工程领域中起着至关重要的作用,而精密工程测量和变形监测是测绘技术的重要应用之一。
在建筑、桥梁、道路等工程项目中,精密测量和变形监测数据处理是确保工程质量和安全的关键环节。
本文将探讨如何进行精密工程测量和变形监测的数据处理,以确保测绘数据的准确性和可靠性。
一、精密工程测量数据处理精密工程测量是指使用高精度仪器和设备,采取精确的方法和技术进行的工程测量。
在进行精密测量之前,首先需要确定测量目标和测量方法。
测量目标可以是建筑物、高架桥、隧道等工程构筑物的各种尺寸、形状和位置信息,测量方法可以是全站仪测量、GNSS测量、激光测量等。
在测量过程中,需要注意测量仪器的校准和检验,确保测量结果的准确性和可靠性。
同时,还要考虑到各种误差的影响,如观测误差、仪器误差、大气影响等,进行误差补偿和校正。
精密工程测量数据的处理包括数据采集、数据处理和数据分析。
数据采集是指使用测量仪器和设备进行实际测量和观测,并将测量数据记录下来。
在数据采集过程中,需要选择合适的测量点和测量方法,确定测量范围和测量精度要求。
数据采集可以是实地测量,也可以是遥感测量,根据具体工程项目的情况选择合适的测量方式。
数据处理是指将采集到的原始测量数据进行清理、整理和处理,得到符合要求的测量结果。
数据处理包括数据滤波、数据平差、数据拟合等操作。
数据滤波是指去除数据中的随机误差和干扰信号,提高数据的精度和稳定性。
数据平差是指使用数学方法对数据进行优化和调整,使得测量结果满足一定的数学模型和几何关系。
数据拟合是指使用数学模型对数据进行拟合和匹配,得到最佳的拟合曲线或曲面。
数据分析是指对处理后的数据进行分析和解释,得出工程测量的结论和结论支撑的依据。
数据分析可以是定量分析,通过统计和数学方法得出某些指标和参数;也可以是定性分析,通过观察和推理得出某些结论和建议。
数据分析是精密工程测量的最后一步,也是决定测量结果应用的关键步骤。
变形监测网平差
实际平差时,取相同的近似坐标(x 0i , y 0i ) x 0i + xi = ∆x + λ cos α ( x 0i + xi ) + λ sin α ( y 0i + yi ) y 0i + yi = ∆y − λ sin α ( x 0i + xi ) + λ cos α ( y 0i + yi )
−
其中N11为N中去掉任意d (秩亏数)行d列
− − 令N m1 = N ( NN ) − , 则X = N m1 AT Pl , 为最小范数解
由误差传播定律得:Qxx = N ( NN ) − N ( NN ) − N = N +
N 为Moore − penrose逆,是唯一的
测绘与国土信息工程系
0 0 3 1 − N (NN ) = 0 3 0 9 − 3 − 3 0 2 x = N ( NN ) − AT Pl = 0 − 2
− 2 V = AX − l = ( AN ( NN ) − AT P − I )l = − 2 − 2
变 形 监 测 网 平 差
h12 = 12.345m,h23 = 3.478m,h31 = −15.817 m S12 = S 23 = S 31 取各点近似高程
0 H10 = 0m,H 2 = 12.345m,H 30 = 15.823m
− 1 1 0 A = 0 −1 1 1 0 − 1
T 秩亏 秩亏
x
<< x
T 经典 经典
x
3、tr (Qxx ) 秩亏 << tr (Qxx ) 经典 说明:用秩亏网平差发现变形的能力较强
科傻平差计算结果

高程网平差报告
[控制网总体情况]
计算软件:沉降监测和等级水准测量观测数据处理软件
项目名称:科傻1 项目类型:高程网
测量部门:观测日期:2020年8月7日
测量人员:计算人员:
已知点数: 2 未知点数: 4
测段数: 5
水准线路总长度(km): 2.28 测段平均长度(km): 0.46 最短测段长度(km): 0.25 最长测段长度(km): 0.65 先验单位权中误差(mm): 1.0000 后验单位权中误差(mm): 0.3155
评定精度采用中误差(mm): 0.3155 测量等级:水准测量国标二等
PVV(mm^2): 0.09953342 自由度: 1
最弱点高程中误差(mm): 0.24 最弱测段高差中误差(mm): 0.21
每公里高差中数偶然中误差: 0.47mm 限差: 1.00mm 合格!
往返观测数:5 附合线路数:1
[往返测高差不符值]。
变形监测数据处理与分析方法探讨
变形监测数据处理与分析方法探讨引言:变形监测数据是指通过使用不同设备和技术手段进行道路、桥梁、建筑物等结构物的变形监测所得到的数据。
这些数据对于评估结构物的稳定性和安全性至关重要。
然而,要从这些数据中获取有用的信息,需要进行数据处理和分析。
本文将探讨变形监测数据处理与分析的一些主要方法和技术。
一、数据处理方法:1.数据清洗:变形监测数据通常会受到传感器误差、环境干扰和人为因素等的影响,导致数据中存在一些噪声和异常值。
因此,在进行数据处理之前,需要对原始数据进行清洗。
这包括去除异常值、平滑数据、填补缺失值等。
常用的数据清洗方法包括均值、中位数、插值等。
2.数据变换:有时候,为了更好地展示和分析数据,需要对数据进行变换。
常见的数据变换方法包括对数变换、归一化、平移和缩放等。
这些变换可以帮助减少数据的偏态、尺度效应和噪声影响,使数据更符合分析要求。
3.数据归类:根据变形监测数据的特征,可以将其分为几个不同的类别,比如线性变形、非线性变形、周期性变形等。
通过将数据进行归类,可以更好地理解和比较不同类别之间的差异。
常见的数据归类方法包括聚类分析、特征提取等。
二、数据分析方法:1.统计分析:统计分析是变形监测数据处理与分析中最常用的方法之一、通过统计分析,可以计算数据的平均值、方差、相关性等指标,帮助理解数据的分布和变化趋势。
常用的统计分析方法包括频率分布分析、回归分析、相关分析等。
2.时频分析:变形监测数据通常是时间序列数据,可以通过时频分析方法来分析其频域和时域特性。
时频分析可以帮助识别数据中的周期性或突变特征,提取变形信号的频率成分和强度等信息。
常用的时频分析方法包括傅里叶分析、小波分析等。
3.模型建立:对于变形监测数据的分析,有时候需要建立数学或物理模型来描述变形行为的规律性。
基于模型的方法可以更好地预测和解释数据中的变化,同时也可以评估结构物的稳定性和安全性。
常见的模型方法包括回归模型、神经网络等。
变形监测数据处理
变形监测数据处理1.变形的类型(了解):按变形性质可以分为周期性变形和瞬时变形;按变形状态则可分为静态变形和动态变形静态变形:指变形监测结果仅表示为时间的函数;动态变形:指在外力作用下产生的变形。
它是动力系统随时间的变化,表示为外力的函数。
其观测结果是建筑物在某一时刻的瞬时变形。
2.变形监测的主要任务(理解):定期重复对拟定观测点的观测,以获得两个观测周期之间的变化;或使用自动遥测记录仪监测建筑物(构筑物)的瞬时变形。
3.变形监测分类(理解):(1)按监测范围分类:全球变形监测:如监测全球板块运动、极移、地球自转速率变化等;区域形变监测:如地壳形变监测、城市地面沉降等;工程和局部变形监测:如监测工程建筑物的三维变形、滑坡体的滑动、地下开采引起的沉降变形、,等(2)按监测位置分类:内部变形监测:内容主要包括工程建筑物内应力、温度变化、动力特性、加速度等的测量;外部变形监测:也称变形观测,其主要内容包括沉降观测、位移观测、倾斜观测、裂缝观测、挠度观测、,等(工程建筑物的内外变形观测关系密切,应同时进行,以相互验证和补充)4.测点分类:(1)水准基点:垂直位移监测的基准点。
一般3~4个点构成一组,形成近似正三角形或正方形,为保证其坚固与稳定,应选埋在变形区以外的岩石上或深埋于原状土上,也可以选埋在稳固的建构筑物上。
普通混凝土标准;地面岩石标记;浅埋钢管标准;井式混凝土标志;深埋钢管标准;深埋双金属标准(2)工作基点:用于直接确定监测点的起点或终点。
工作基点布置:应在变形区附近相对稳定的地方,其高程尽可能接近监测点的高程。
工作基点埋设:一般采用地表岩石标志。
当建筑物附近的覆盖层较深时,可以使用浅埋标记。
当新大楼附近有一座地基稳定的建筑物时,也可以设置在建筑物上。
工作基点观测:应经常与水准基点进行联测,通过联测结果判断其稳定状况,保证监测成果的正确可靠。
(3)监测点:垂直位移监测点的简称,布置在被监测的建(构)筑物上。
变形监测数据整理
变形测量成果整理
8.7.1高速铁路变形监测网的平差计算应采用专业的变形监测数据处理软件进行处理。
平差计算前,先绘出平差网图,注明线路方向、高差和长度,检查各环线闭合差是否符合限差要求。
8.7.2 分析起算点的兼容性,选择兼容的起算点进行平差计算。
平差后得出每个待定点的高程和高程中误差及单位权中误差,分析成果中偶然误差和系统误差的影响程度,对水准网的观测质量作综合评定。
8.7.3检算各项闭合差符合要求后,计算每千米高差偶然中误差和全中误差以及各点的偶然中误差、最弱点中误差和相邻点相对高程中误差,并进行精度评价。
8.7.4根据各监测点高程中误差、观测所得沉降量等信息,求出各监测点的高程及相对上一期和第一期的沉降量。
8.7.5 构筑物变形测量的相关资料应在竣工交验时移交接收单位。
移交资料应包含以下内容:
1 施测方案与技术设计书;
2 控制点与观测点平面布置图;
3 标石、标志规格及埋设图;
4 仪器检验与校正资料;
5 观测记录手簿;
6 平差计算、成果质量评定资料及测量成果表;
7 变形过程和变形分布图表;
8 变形分析成果资料;
9 变形测量技术报告。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
概述: (一)全站仪可以测斜距、平距、角度,普通工作在要求不高时,我们可以直接用平距,但是一旦涉及导线等精密测量时,“平距”必须通过别的渠道进行改正得到 (斜距改平或者边长改正)(二)当测量任务涉及到变形监测、导线网、多测回测角等精密测量时,不少测工受制于仪器、或者相关后处理软件的制约(如建策Dam6.0 徕卡三维变形软件)、其“数据整理归纳”和“斜距改平”的工作难以推进,困惑不前。
(三)本文主要交流探讨:①徕卡tca2003 、tcr1201 、tm30 、tm50 、ts15/16 、ts60 等徕卡测量机器人的非官方软件多测回测角测量的外业采集及数据后处理平差替代方法。
②普通1″仪器(特指:无马达、无自动照准、无多测回测角)的外业测量-原始数据—整理—编制—科傻平差的流程作业。
(四)本文是关于:徕卡测量机器人和普通仪器对精密测量外业数据作用于后期数据平差的探讨和交流,交流指正(如测距仪的气象改正系数K1 、K2)(五)仪器架设为控制点上 (不用设站)采用全圆观测方法非极坐标方法进行数据采集 (仪器架设点以为方向,观测其余待监测点再以测站点以为方向,观测其余待监测点 ) 外业上不带入任何坐标,只采集边角数据。
内业用的已知坐标,加入气象等条件后,通过软件解算得出坐标,可先做为高等级控制网、再测量时候把也测进去,用于复核 (网形图片参考附件五)关键:全圆观测、变形监测、导线、网平差、边坡监测、三角高程平差难点:多测回测角、斜距化平、边长改正要点:(一)精密测量都是级别范畴、需要严谨的态度对待 (注意:仪器对中精度、量取精度、温度、干湿、气压、成像条件等)(二) 对变形监测、导线网、三角高程的外业数据采集步骤要有大致了解(三) 明白“多测回测角”对于工作的重要性(四)关于“斜距化平” 的突破(五) 常用到的参数 (大气折光系数K 、地球曲率R、仪器加 (乘) 常数、温度℃、气压Pa 等)①仪器加 (乘) 常数通过该台仪器的检定证书查看如(常数主要是对测距改正)(加常数:K=-1.38mm 乘常数:R=1.78mm/km )②更严谨的会涉及到激光的波长、及频率、周期等③测距仪气象改正系数,公式 (请百度:查阅全站仪距离气象改正与推导)(六)针对从非自动仪器,下载出原始数据进行编制及—Cosa 进行平差,我们得掌握Cosa 的高程in1、平面in2 及其斜距化平.SV 文件的编写、明白其具体含义. (七)适合无马达、无ATR 的普通全站仪外业采集数据—整理外业—编制cosa.SV 文件进行后处理。
(但该方法自动化程度较差、时效较低)①因测量机器人自动化程度较高,外业多测回后可直接导出边角数据,后处理软件对接、报表生成、数据平差、本文不加以论述② 本文主探讨:测量机器人导出原始数据、利用科傻老版进行数据编制及后期平差场景:水电站使用仪器:徕卡( ″ )控制点:个待监测点:个目的:水电站三维变形监测解算原作业方法:多测回测角(全圆观测) 徕卡三维变形监测后处理(建策平差)现在方法:外业多测回测角采集数据编制科傻解算平差(一)控制点没有,可自建独立坐标系(二)场地合用于:桥梁结构检测、隧道检测、边坡检测、建造检测1.测量机器人,外业多测回测角或者三维变形监测数据采集 (省略…今重点在于数据整理格式编写平差处理)2.外业数据采集完毕后从仪器TM30中,导出tpt(水平角)、txt(斜距)、tzt(垂直角)三个文本格式文件 (徕卡也可直接导出Obs格式—接入—徕卡三维变形监测后处理。
本文就不以叙述)3.利用微软Word VB或者其它工具整理出所需要的水平角、斜距、垂直角数据,准备进入编写Cosa.SV文件(一)所需要的数据:已平均后的数值(二)关于“转换工具” ,请查阅五三二四六一九二五工具4.新建txt文本,按下列进行编制方向中误差秒,测距仪固定误差比例误差测距仪加常数,乘常数如,测距仪光轴和经纬仪视准轴垂直偏距测距仪气象改正系数,,大气折光系数如地球平均曲率半径,气压单位可为或者已知点点号,坐标,坐标,海拔高程测站点名仪器高,温度℃ ,气压照准点名,观测值类型,观测值照准点名,观测值类型,观测值如:方向值,水平角(斜距、垂直角、目标高) 根据数据整理后编写的文件J20.238,5,708.80829J1,L,0J1,S,198.6745,86.351643,0.235 OP08,L,31.113359OP08,S,94.0479,92.082963,0.237 OP07,L,41.520343OP07,S,197.3599,88.475446,0.237 OP05,L,53.350235OP05,S,146.1896,89.082664,0.238 OP03,L,65.410522OP03,S,131.7340,89.024698,0.235 J3,L,99.015925J3,S,95.5966,87.281626J10.238,5,708.80829J2,L,0J2,S,198.6752,93.244938,0.238 OP07,L,291.185196OP07,S,141.5726,93.064389,0.237 OP05,L,313.284406OP05,S,162.3955,93.240619,0.239 OP03,L,320.121358OP03,S,187.7817,92.562603,0.236 J3,L,336.084887J3,S,233.3631,91.520626,0.235 OP08,L,337.341304OP08,S,128.4970,96.512967,0.237 J10.238,5,708.80829J2,L,0J2,S,198.6752,93.244955,0.238 OP06,L,307.140319OP06,S,145.8757,93.472997,0.239 OP04,L,317.075941OP04,S,175.1305,93.083702,0.236 OP02,L,322.523205OP02,S,201.0021,92.440831,0.234 OP09,L,333.425577OP09,S,92.7127,99.363810,0.236 J3,L,336.084867J3,S,233.3631,91.520621,0.235气象、球差、气差、仪器加(乘)常数、平距改正全部在软件内完成确认无误后,保存,修改后缀为打开科傻工具斜距化平 (即可分拆为科傻直接分别高程网平差、平面网平差、高程网和平面网文件)(生成报告,查看相关精度是否满足)外业采集数据的仪器大气改正全部关闭 (科傻内改正) 带上温度计,气压表准确录入气象数据科傻和的处理结果比对高程和平面解算值基本在摆布满足要求普通机型做监测(多测回测角),下来私下交流参考资料(一部份) 边长改正全站仪的斜距测量精度是比较高的,但斜距需要进行一些改正和归算才干得到两点间的平距,特别是当测距边较长时,需要考虑地球曲率和大气折光的影响精密导线网的边长(斜距化平):必须要进行气象改正、仪器加(乘)常数改正、平距改正、边长的高程归化和投影改化1.气象改正S2= S1+S1* (K1-K2*0.0001*P/(1+0.00366*T)) *10-6 (跟T 温度、P 气压相关)2.仪器加(乘)常数改正 (仪器自身参数-检定报告中查看)3.平距改正D=S*cos (a+f) f= (1-k) p*cos/2R跟大气折光系数、地球平均曲率半径相关 ( 球差、气差双差改正)4.边长的高程归化,归化到当地平均高程面上的测距边长度D°D°=D* (1+(Hp-Hm)/R) (R 曲率半径Hp 平均高程Hm 两点的平均高程平原地区基本等于Hp-Hm≈0高程投影面主要是跟当地海拔高确定,对高程没什么影响,最要是对平面影响比较大,普通在高海拔地区施工作业才涉及此问题、取平均海拔值5.投影改化 (小范围不考虑)6.(1-3)项基本都用到 (4-5)特殊地区使用(二部份) 气象对归化距离的影响1. (大气折光系数0.13) 5℃ 945hpaS,198.3246 (归化水平距离)2. (大气折光系数0.13) 15℃ 945hpaS,198.3264 (归化水平距离)3. (大气折光系数0.13) 25℃ 945hpaS,198.3282 (归化水平距离)4. (大气折光系数0.14) 5℃ 945hpaS,198.3246测试经过 1.温度每上升10℃ 归化的水平距离增加2mm2.大气折光系数K 0.13 0.14 影响不大3.气压,暂未测试(三部份)严密斜距改平距运算1.加常数乘常数改正计算 (加常数乘常数检定报告中查看)2.改正后的斜距计算 (气象改正温度气压先输入进去得到S)3.地球曲率与大气折光对天顶距的改正值(”)4.测站与镜站平均高程面的距离 (水平距离)注:D=S*Sina为什么是水平距离测量里的垂直角(天顶距)表示的是正弦定理所以当垂直角较大时,一定要斜距化平距(四部份) 附件附件一:原始数据(徕卡tm/ts tpt、txt、tzt)附件二:经整理后的电子表格(水平角、垂直角、边长)附件三:分拆后的科傻.IN2平面网数据和.IN1高程数据附件四:科傻平差结果值与建策Dam6.0的比较附件五:案例点位布置图附件一: (文库原因上传不了原始数据,请谅解)比如:当竖直角为3° 距离为200m 时,不加改正和加改正的平面距离误差为3mm附件二:电子表格附件三:SV转IN2和IN1文件科傻IN2平面0.5,1,1J2,80000,40000J1,80013.834,39802.1592J2J1,L,0.000000J1,A,273.595961OP09,L,19.105224OP09,S,123.203850OP08,L,31.113363OP08,S,93.983760OP07,L,41.520347OP07,S,197.318540OP06,L,46.253945OP06,S,159.953630OP05,L,53.350239OP05,S,146.174870OP04,L,59.281161OP04,S,138.109500OP03,L,65.410526OP03,S,131.717290OP02,L,72.290691OP02,S,127.067030J3,L,99.015933J3,S,95.504725J1J2,L,0.000000OP07,L,291.185191OP07,S,141.365410OP06,L,307.140324OP06,S,145.558140OP05,L,313.284401OP05,S,162.111500OP04,L,317.075946OP04,S,174.869040OP03,L,320.121353OP03,S,187.536700OP02,L,322.523210OP02,S,200.775260OP09,L,333.425582OP09,S,91.412690J3,L,336.084877J3,S,233.241390OP08,L,337.341299OP08,S,127.579440科傻IN1高程J2,720.9747J1,732.8067J2,OP08,-3.512900,0.094 J2,OP07,4.142210,0.197 J2,OP05,2.193820,0.146 J2,OP03,2.196670,0.132 J2,J3,4.221600,0.096J2,OP09,-3.648220,0.123 J2,OP06,2.183190,0.160 J2,OP04,2.224150,0.138 J2,OP02,2.239770,0.127 J2,J3,.000000,0.096J1,J2,-11.829130,0.199J1,J2,-5.913920,0.199J1,OP06,-9.646270,0.146J1,OP04,-9.600030,0.175J1,OP02,-9.586780,0.201J1,OP09,-15.476180,0.093J1,J3,-7.601925,0.233J1,J2,-5.915210,0.199J1,J2,.000000,0.199J1,OP07,-7.683920,0.142J1,OP05,-9.635310,0.162J1,OP03,-9.628950,0.188J1,J3,.000000,0.233J1,OP08,-15.342390,0.128J2,J1,11.829130,0.199J2,J1,5.913920,0.199J2,J1,5.915210,0.199J2,J1,.000000,0.199附件四(科傻平差与其它软件坐标值之间比较)附件五(案例点位布置图)。