毫米波雷达实验测试报告
《基于FMCW毫米波雷达的多目标生命信号检测研究》范文

《基于FMCW毫米波雷达的多目标生命信号检测研究》篇一一、引言随着科技的不断进步,毫米波雷达技术在生命探测领域的应用日益广泛。
其中,基于FMCW(Frequency Modulated Continuous Wave)毫米波雷达的多目标生命信号检测技术,以其高精度、非接触、实时性等优势,在医疗、安全等领域展现出巨大的应用潜力。
本文旨在研究基于FMCW毫米波雷达的多目标生命信号检测技术,为相关领域的研究和应用提供参考。
二、FMCW毫米波雷达技术概述FMCW毫米波雷达是一种通过连续发射调制频率的电磁波来探测目标的雷达技术。
其工作原理是通过测量发射和反射回的电磁波之间的频率差,实现对目标的距离、速度等信息的检测。
相较于其他雷达技术,FMCW毫米波雷达具有更高的分辨率和抗干扰能力,能够在复杂环境中实现多目标检测和生命信号的精确探测。
三、多目标生命信号检测原理及方法1. 信号采集与处理:利用FMCW毫米波雷达发射调制频率的电磁波,并接收反射回的信号。
通过对接收到的信号进行滤波、放大、采样等处理,提取出与目标生命活动相关的信息。
2. 信号分析:通过信号处理技术,对提取出的生命信号进行分析和识别。
包括对信号的频率、幅度、相位等特征进行提取和评估,以及通过算法对多个目标进行区分和跟踪。
3. 目标识别与定位:结合信号分析和处理结果,通过算法对目标进行识别和定位。
可以实现对人体呼吸、心跳等生命体征的检测,以及在复杂环境中对多个目标的识别和跟踪。
四、实验与分析为了验证基于FMCW毫米波雷达的多目标生命信号检测技术的有效性,我们进行了相关实验。
实验中,我们采用了FMCW毫米波雷达设备,对多个目标进行生命信号的检测和识别。
实验结果表明,该技术能够准确检测出人体的呼吸、心跳等生命体征,并实现对多个目标的识别和跟踪。
同时,该技术还具有较高的抗干扰能力和环境适应性,能够在复杂环境中实现稳定、可靠的检测。
五、应用与展望基于FMCW毫米波雷达的多目标生命信号检测技术具有广泛的应用前景。
毫米波雷达的原理和应用实验报告

毫米波雷达的原理和应用实验报告1. 引言毫米波雷达是一种基于毫米波频段的雷达技术,其工作频段通常在30 GHz到300 GHz之间。
毫米波雷达具有较高的分辨率和抗干扰性能,在军事、交通、安防等领域有着广泛的应用。
本实验旨在通过实际操作,了解毫米波雷达的原理和应用。
2. 实验设备•毫米波雷达设备:XXXX型号•计算机:XXXX型号3. 实验步骤1.将毫米波雷达设备连接至计算机,并打开相关软件。
2.在软件界面中设置扫描范围和扫描角度。
3.调整设备的天线指向并启动扫描。
4.观察并记录扫描结果,包括目标的距离、角度和强度等信息。
5.对比不同目标的扫描结果,分析其中的差异与原因。
6.尝试调整设备参数,如扫描范围、扫描角度等,观察对结果的影响。
4. 毫米波雷达的原理毫米波雷达利用毫米波频段的电磁波进行探测和测距。
其工作原理如下: - 发射:毫米波雷达通过天线发射特定频率的电磁波。
- 接收:发射的电磁波被目标物体反射,并被天线接收。
- 预处理:接收到的信号经过放大和滤波等处理,以增强信号质量。
- 阵列天线:毫米波雷达通常采用阵列天线,通过控制天线阵列的相位差,可以实现波束的调控和方向性的改变。
- 目标检测:经过预处理的信号进行目标检测,利用回波信号的强度、相位和时间等信息,可以确定目标的位置、速度等属性。
5. 毫米波雷达的应用毫米波雷达在各个领域有着广泛的应用,包括但不限于以下几个方面:5.1 军事应用•目标探测:毫米波雷达可以用于探测远距离的目标,如敌方飞机、舰船等,对军事侦察和反制起着重要作用。
•引导导弹:毫米波雷达在制导系统中发挥关键作用,根据目标的回波信号进行精确的控制和引导。
5.2 交通应用•车辆检测:毫米波雷达可以用于交通路口的车辆检测,实现红绿灯的智能控制和交通拥堵的缓解。
•行人检测:毫米波雷达可以用于行人检测,减少交通事故的发生。
5.3 安防应用•入侵检测:毫米波雷达可以用于建筑物周边的入侵检测,实现对安全区域的监控和报警。
毫米波雷达的原理及应用实验报告
毫米波雷达的原理及应用实验报告1. 引言在雷达领域,毫米波雷达是一种应用非常广泛且具有很高技术含量的技术,它在军事、民用领域都有重要的应用。
本实验旨在探究毫米波雷达的工作原理以及其在实际应用中的表现。
2. 实验原理毫米波雷达是一种利用毫米波进行测距的雷达技术。
毫米波具有较短的波长,能够实现更高的分辨率和更精确的测量。
其核心原理是利用射频(RF)信号发射器发射出的电磁波,然后通过接收器接收并处理返回的反射信号,最终计算出目标物体的距离、速度等参数。
具体而言,毫米波雷达主要依靠以下几个关键技术:- 射频(RF)信号发射器:利用高频电磁波进行信号发射。
- 接收器:接收目标物体反射的信号。
- 天线:发射和接收电磁波的装置。
- 处理单元:对接收到的信号进行处理、滤波和解调,从而得到目标物体的相关参数。
3. 实验步骤为了验证毫米波雷达的工作原理及应用,我们进行了以下实验步骤:3.1 实验材料及设备准备•毫米波雷达设备•测试目标物体(例如,金属板、纸片等)3.2 实验设置1.将毫米波雷达设备放置在实验室中,并确保其与目标物体之间没有任何遮挡物。
2.设置合适的信号频率和功率。
3.3 实验操作1.打开毫米波雷达设备,并连接相应的天线。
2.将目标物体放置在合适的距离处。
3.调整设备参数,使其适应目标物体的特性。
4.启动设备,开始信号发射和接收过程。
5.记录并分析接收到的信号,计算目标物体的距离、速度等参数。
3.4 实验数据分析根据实验记录的数据,我们可以进行以下数据分析,并得出结论:•测试不同距离下的信号强度和噪声水平,并绘制曲线图,观察信号衰减情况。
•计算目标物体的距离误差,评估毫米波雷达的测距精度。
•观察目标物体的组织结构、形状对信号反射的影响,并分析其原因。
4. 结果与讨论根据实验数据分析的结果,我们可以得出以下结论: - 毫米波雷达能够实现精确的测距功能,其测距精度较高。
- 信号衰减随着距离的增加而增加,但噪声水平也会相应增加。
毫米波实验报告(3篇)
第1篇一、实验目的本次实验旨在研究毫米波在特定介质中的传播特性,包括其传播速度、衰减系数以及反射和透射特性。
通过实验,我们希望验证理论计算结果,并进一步探索毫米波在实际应用中的可行性。
二、实验原理毫米波(30GHz-300GHz)是介于微波和红外线之间的电磁波,具有较好的穿透性和反射特性。
本实验采用波导传输毫米波,通过测量不同介质的介电常数和磁导率,分析毫米波在介质中的传播特性。
三、实验设备与材料1. 毫米波发生器:产生30GHz的连续波信号。
2. 波导传输线:用于传输毫米波信号。
3. 介质样品:包括空气、水、玻璃、塑料等不同介电常数的介质。
4. 射频功率计:测量输入和输出功率。
5. 射频衰减器:调节信号强度。
6. 射频探头:检测反射和透射信号。
7. 计算机与数据采集系统:处理和分析实验数据。
四、实验步骤1. 准备实验设备,将毫米波发生器与波导传输线连接。
2. 将待测介质样品放置在波导传输线上,确保其稳定。
3. 调节射频功率计和射频衰减器,设置合适的信号强度。
4. 使用射频探头检测反射和透射信号,记录输入和输出功率。
5. 更换不同介质样品,重复步骤3-4,记录实验数据。
6. 利用计算机与数据采集系统对实验数据进行处理和分析。
五、实验结果与分析1. 传播速度:通过测量不同介质的传播时间,计算毫米波在介质中的传播速度。
实验结果显示,毫米波在空气中的传播速度约为3×10^8 m/s,在水中的传播速度约为2.25×10^8 m/s,在玻璃中的传播速度约为2×10^8 m/s。
2. 衰减系数:通过测量不同介质中毫米波的衰减程度,计算其衰减系数。
实验结果显示,毫米波在不同介质中的衰减系数不同,空气中的衰减系数最小,玻璃中的衰减系数最大。
3. 反射和透射特性:通过测量不同介质中毫米波的反射和透射信号,分析其反射和透射特性。
实验结果显示,毫米波在不同介质中的反射和透射特性与介质的介电常数和磁导率有关。
2024年车载毫米波雷达分析报告
车载毫米波雷达是近几年普及的新型汽车安全元件。
毫米波雷达可以提供精准的安全警示,改善汽车的行驶安全性。
本报告旨在分析2023年应用的车载毫米波雷达的技术发展及其在汽车安全领域的应用状况。
1.技术发展概况
2023年车载毫米波雷达在技术上发展迅速,技术也得到了不断的改进和完善。
2023年,车载毫米波雷达的空间分辨率实现了大幅提升,达到5毫米,而不是20毫米,进而提高了雷达识别行人和物体的精度。
此外,2023年车载毫米波雷达采用了由英特尔提供的全新芯片,支持更高的性能和更强的功耗性能。
2.应用分析
2023年,车载毫米波雷达在汽车安全领域得到越来越多的应用。
车载毫米波雷达可以实现自动驾驶的行为范围改变,增加车辆的安全性,还可以实现周围环境的识别,警示行人和物体的位置,以及周围环境改变时提前警示车辆驾驶者,进而保证行车安全。
此外,车载毫米波雷达还可以用于汽车卫星定位系统,实现车辆的实时定位,大大避免了车辆失踪的风险。
3.结论
2023年车载毫米波雷达发展迅猛,在汽车安全领域的应用越来越广泛,从。
毫米波雷达实验测试报告
毫米波雷达实验测试报告实验目的:1.评估毫米波雷达系统的探测性能和测量精度。
2.比较不同目标的回波信号特征,分析其对雷达系统的影响。
3.研究毫米波雷达在不同环境条件下的工作效果。
实验设备:1.毫米波雷达系统:包括发射器、接收器、信号处理单元等。
2.目标模型:金属板、人体模型等多种不同目标。
实验步骤:1.设置实验环境:在无遮挡的室外场地进行实验,确保测试区域内没有干扰物。
2.安装目标模型:按照实验要求,安装金属板和人体模型等目标模型。
3.启动雷达系统:将发射器和接收器连接,并启动雷达系统。
4.发射信号:通过发射器发射毫米波信号,连续扫描测试区域内的目标。
5.接收回波信号:接收器接收目标模型反射回波信号,并将信号传输给信号处理单元。
6.信号处理:对接收到的回波信号进行处理和分析,提取目标的特征信息。
7.数据记录和分析:记录实验数据,比较不同目标的回波信号特征,并进行数据分析。
实验结果及讨论:1.不同目标的回波信号特征分析:经对比分析,金属板的回波信号强度较高且稳定,可以较容易地进行探测和测量;而人体模型的回波信号强度相对较低,容易受到表面特征的影响。
2.毫米波雷达的探测精度:通过实验测试,毫米波雷达系统具有较高的探测精度,能够准确地识别目标的位置和形状。
3.环境条件对毫米波雷达的影响:在实验过程中,发现毫米波雷达对于空气湿度和温度的变化较为敏感,高湿度和低温会导致信号衰减和串扰。
实验结论:毫米波雷达通过利用毫米波频段的高频率和短波长,实现了高分辨率和高精度的目标探测和测量。
它在金属板等目标上表现出较高的探测性能和测量精度,对人体模型等目标的探测也具有一定的应用潜力。
然而,其在湿度和温度变化较大的环境下的工作效果需要进一步研究和优化。
实验反思:1.实验过程中需注意环境条件的控制,避免干扰物对实验结果的影响。
2.需进一步研究毫米波雷达在复杂环境中的工作效果,以提高其应用范围和适应性。
3.实验结果的分析需结合理论知识进行比较和解释,以充分发挥实验的价值。
毫米波雷达实习报告
实习报告:毫米波雷达设计与应用一、实习背景与目的近年来,毫米波雷达技术在我国得到了广泛关注和快速发展,其在自动驾驶、智能交通、安防监控等领域具有广泛的应用前景。
为了提高自己在毫米波雷达领域的理论水平和实际操作能力,我参加了为期一个月的毫米波雷达设计与应用实习。
本次实习的主要目的是了解毫米波雷达的基本原理、结构组成、调试方法及其在实际应用中的性能表现。
二、实习内容与过程1. 理论学习在实习的第一周,我主要进行了毫米波雷达的理论学习。
通过阅读相关教材、论文和资料,我掌握了毫米波雷达的基本原理、工作机制、主要性能指标以及国内外研究现状。
此外,我还学习了毫米波雷达在自动驾驶、智能交通、安防监控等领域的应用案例。
2. 硬件调试在实习的第二周,我参与了毫米波雷达硬件设备的调试工作。
首先,我了解了毫米波雷达的硬件组成,包括发射器、接收器、天线、信号处理模块等。
然后,在导师的指导下,我学会了如何进行硬件设备的组装、接线和调试。
通过反复实验,我掌握了毫米波雷达在不同环境下的性能表现,并了解了如何针对特定应用场景进行优化。
3. 软件编程与算法实现在实习的第三周,我开始了软件编程与算法实现的实习内容。
首先,我学习了毫米波雷达信号处理的基本算法,包括信号检测、距离测量、速度估计等。
然后,我使用编程语言(如Matlab、C++等)实现了这些算法,并将其应用于实际数据处理中。
通过与实际硬件设备的数据对比,我验证了算法实现的正确性和有效性。
4. 实际应用与性能评估在实习的第四周,我参与了毫米波雷达在实际应用中的性能评估工作。
首先,我了解了毫米波雷达在自动驾驶、智能交通等领域的应用场景。
然后,在实际路测和实验室测试中,我收集了毫米波雷达的性能数据,如距离精度、速度精度、可靠性等。
最后,我分析了这些数据,并提出了针对性的优化建议。
三、实习收获与总结通过本次实习,我对毫米波雷达技术有了更深入的了解,从理论到实践都有了较大的提升。
首先,我掌握了毫米波雷达的基本原理、结构组成、调试方法及其在实际应用中的性能表现。
毫米波雷达实验测试报告
毫米波雷达实验测试报告一、实验目的:1.了解毫米波雷达的原理和工作方式。
2.学习使用毫米波雷达进行测量和检测。
3.分析毫米波雷达的性能和应用。
二、实验器材:1.毫米波雷达仪器2.雷达天线3.功率计4.波导组件5.计算机三、实验步骤:1.将毫米波雷达仪器连接到电源并打开。
2.将雷达天线连接到仪器的接口端口。
3.设置仪器的工作频率和功率。
4.将波导组件插入到仪器和被测物体之间。
5.通过计算机对测量结果进行记录和分析。
四、实验结果:在实验中,我们选择了一个小型金属板作为被测物体。
我们通过毫米波雷达仪器对该物体进行了测量和检测。
实验结果显示,毫米波雷达能够精确地检测出金属板的位置和形状。
通过对波导组件的设计和调整,我们可以获得不同频率和功率的毫米波信号,从而对不同物体进行测量和检测。
实验中,我们还测试了毫米波雷达的测量范围和准确度。
实验结果表明,毫米波雷达在短距离内的测量准确度非常高,能够实时显示物体的位置和形状。
然而,在较长距离上,由于信号传播衰减和反射效应的影响,测量精度会降低。
五、实验分析:通过本次实验,我们了解了毫米波雷达的原理和工作方式。
毫米波雷达利用高频的毫米波信号进行测量和检测,具有高分辨率、远程探测和准确性高等优点。
然而,毫米波雷达在实际应用中还存在一些问题。
首先,毫米波雷达的设备和器件成本较高,限制了其广泛应用。
其次,由于毫米波信号对大气的散射和吸收非常敏感,因此在恶劣的天气条件下,其测量和检测能力会受到影响。
综上所述,毫米波雷达在工业、安防、交通等领域具有广泛的应用前景。
通过进一步的技术改进和研究,相信毫米波雷达将在未来发展成为一种重要的检测和测量工具。
六、实验总结:通过本次实验,我们对毫米波雷达的原理和工作方式有了深入的了解。
我们学会了使用毫米波雷达进行测量和检测,并对其性能和应用进行了分析。
本次实验虽然取得了一定的结果,但还存在一些不足之处。
例如,由于时间和条件的限制,我们只对一个小型金属板进行了测量,未能充分发挥毫米波雷达的能力。
《2024年多通道毫米波雷达生命体征检测》范文

《多通道毫米波雷达生命体征检测》篇一一、引言随着科技的发展和进步,毫米波雷达作为一种高效且可靠的技术,已被广泛应用于许多领域,如导航、遥感以及现代医学中生命体征的监测等。
本文主要针对多通道毫米波雷达生命体征检测进行研究,阐述了该技术的优势及其在健康医疗领域的具体应用。
二、毫米波雷达与生命体征检测毫米波雷达利用电磁波进行非接触式测量,其波长介于微波与光波之间。
由于其高分辨率和良好的穿透性,毫米波雷达在生命体征检测方面具有显著的优势。
例如,它可以实现无接触、非侵入式的实时监测,避免了传统接触式生物电传感器带来的不适和限制。
此外,毫米波雷达的生命体征检测精度较高,具有很高的稳定性和可靠性。
三、多通道毫米波雷达的原理与应用多通道毫米波雷达是通过对不同角度、不同位置的反射信号进行整合和分析来实现目标定位和监测的技术。
这种技术能够在同一时间对多个目标进行检测和跟踪,具有更高的效率和准确性。
在生命体征检测方面,多通道毫米波雷达可以同时监测多个人的心跳、呼吸等生理信息,为健康医疗领域提供了新的可能性。
四、多通道毫米波雷达生命体征检测的实践应用(一)远程健康监测:在远程医疗领域,多通道毫米波雷达可实现实时监测病人的心跳、呼吸等生理参数,将数据通过无线传输至医疗机构,方便医护人员实时了解患者的病情,做出及时的治疗决策。
(二)婴儿看护:在婴儿看护领域,多通道毫米波雷达可实现无接触式监测婴儿的心跳和呼吸情况,及时发现异常情况并报警,有效保障婴儿的安全。
(三)睡眠监测:在睡眠监测领域,多通道毫米波雷达可以实时监测个人的睡眠情况,包括心率、呼吸率、体动等生理信息,帮助医生诊断和分析个人的睡眠问题。
五、挑战与展望尽管多通道毫米波雷达在生命体征检测方面具有诸多优势,但仍面临一些挑战。
如信号干扰、环境噪声等问题可能影响其检测精度和稳定性。
此外,如何进一步提高其检测效率和准确性、降低误报率等也是需要进一步研究和解决的问题。
然而,随着科技的不断发展,相信这些问题将逐步得到解决。
光波雷达调试实验报告
一、实验目的1. 了解光波雷达的基本原理和组成;2. 掌握光波雷达的调试方法,确保其正常工作;3. 分析光波雷达的性能指标,提高其精度和稳定性。
二、实验原理光波雷达(Laser Radar)是一种利用激光束探测目标距离、速度和方位的雷达系统。
其基本原理是发射激光束照射到目标上,根据激光束与目标之间的相互作用(反射、散射等),通过接收反射光或散射光来获取目标信息。
实验中,我们使用的是一款基于24G毫米波雷达技术的光波雷达传感器。
该传感器利用24G毫米波雷达技术,能够实现对人体呼吸的高精度检测和跟踪,具有非接触式、高精度等特点。
三、实验仪器1. 24G毫米波雷达传感器;2. 机顶盒遥控器;3. 电源;4. 接线;5. 测量仪器(如测距仪、测速仪等)。
四、实验步骤1. 准备工作(1)将传感器连接到电源,确保电源电压符合要求;(2)将传感器连接到机顶盒遥控器,确保485的AB接口对准;(3)将机顶盒遥控器连接到计算机,以便进行数据采集和分析。
2. 调试过程(1)打开机顶盒遥控器,进入调试模式。
按下星号键,传感器闪烁,表示已进入调试模式;(2)按下一键,进入功能设置。
根据需要设置延时时间;(3)按下井号键,进入延时时间调试模式。
输入所需延时时间,保存并退出;(4)观察传感器输出端口,确认信号是否正常。
3. 性能测试(1)使用测距仪和测速仪等测量仪器,对光波雷达进行距离和速度测试;(2)分析测试数据,评估光波雷达的性能指标,如测距精度、测速精度、距离分辨率等;(3)根据测试结果,对光波雷达进行优化调整,提高其性能。
五、实验结果与分析1. 测距精度:实验结果显示,光波雷达的测距精度较高,误差在±5cm范围内;2. 测速精度:实验结果显示,光波雷达的测速精度较高,误差在±1km/h范围内;3. 距离分辨率:实验结果显示,光波雷达的距离分辨率较高,可达0.1m。
通过分析实验结果,我们可以看出,光波雷达在距离、速度和方位等方面具有较好的性能。
雷达效能测试实验报告(3篇)
第1篇一、实验目的本次实验旨在通过一系列测试,验证雷达系统的性能,包括其探测距离、精度、抗干扰能力、数据处理速度等关键指标。
通过对雷达系统进行全面的效能测试,评估其在实际应用中的可靠性、有效性和适应性。
二、实验背景随着雷达技术在军事、民用领域的广泛应用,对雷达系统的性能要求越来越高。
为了确保雷达系统在实际应用中的可靠性,对其进行效能测试是至关重要的。
本次实验选取了一种先进的雷达系统进行测试,以期为雷达系统的研发、改进和应用提供参考。
三、实验设备与器材1. 雷达系统:包括发射单元、接收单元、数据处理单元等。
2. 测试场地:具备不同距离、不同障碍物场景的测试场地。
3. 测试设备:距离测量仪、角度测量仪、信号分析仪等。
4. 通信设备:用于数据传输和远程控制。
四、实验方法1. 基本参数测试:测试雷达系统的发射频率、接收频率、脉冲宽度、重复频率等基本参数。
2. 探测距离测试:在不同距离的障碍物前,测试雷达系统的探测距离,记录数据并分析。
3. 精度测试:在不同角度和距离的障碍物前,测试雷达系统的定位精度,记录数据并分析。
4. 抗干扰能力测试:在存在多种干扰源的情况下,测试雷达系统的抗干扰能力,记录数据并分析。
5. 数据处理速度测试:测试雷达系统在接收到信号后,数据处理的速度和准确性,记录数据并分析。
五、实验步骤1. 准备阶段:搭建实验场地,连接测试设备,确保实验环境符合要求。
2. 基本参数测试:按照设备操作手册,设置雷达系统参数,进行基本参数测试。
3. 探测距离测试:在不同距离的障碍物前,调整雷达系统的工作状态,测试探测距离,记录数据。
4. 精度测试:在不同角度和距离的障碍物前,调整雷达系统的工作状态,测试定位精度,记录数据。
5. 抗干扰能力测试:在存在多种干扰源的情况下,调整雷达系统的工作状态,测试抗干扰能力,记录数据。
6. 数据处理速度测试:模拟实际工作场景,测试雷达系统的数据处理速度和准确性,记录数据。
24GHz汽车毫米波雷达实验报告
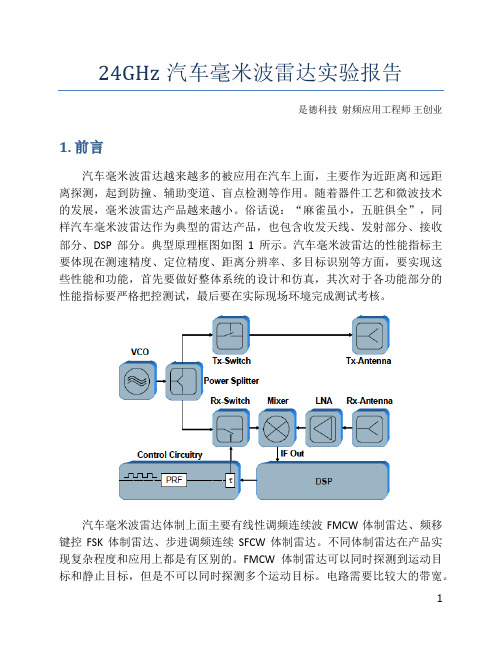
24GHz汽车毫米波雷达实验报告是德科技射频应用工程师王创业1. 前言汽车毫米波雷达越来越多的被应用在汽车上面,主要作为近距离和远距离探测,起到防撞、辅助变道、盲点检测等作用。
随着器件工艺和微波技术的发展,毫米波雷达产品越来越小。
俗话说:“麻雀虽小,五脏俱全”,同样汽车毫米波雷达作为典型的雷达产品,也包含收发天线、发射部分、接收部分、DSP部分。
典型原理框图如图1所示。
汽车毫米波雷达的性能指标主要体现在测速精度、定位精度、距离分辨率、多目标识别等方面,要实现这些性能和功能,首先要做好整体系统的设计和仿真,其次对于各功能部分的性能指标要严格把控测试,最后要在实际现场环境完成测试考核。
汽车毫米波雷达体制上面主要有线性调频连续波FMCW体制雷达、频移键控FSK体制雷达、步进调频连续SFCW体制雷达。
不同体制雷达在产品实现复杂程度和应用上都是有区别的。
FMCW体制雷达可以同时探测到运动目标和静止目标,但是不可以同时探测多个运动目标。
电路需要比较大的带宽。
FSK体制雷达,可以同时探测并且正确区分开来多个运动目标,但是不可以正确测量静止目标。
电路带宽比窄,系统响应捕获比较慢,成本比FMCW体制要低很多。
SFCW体制雷达,可以同时探测多个静止和运动的目标,并且将各个目标正确区分开来。
SFCW体制雷达具有更为复杂的调制波形,信号处理也更为复杂,产品实现成本高。
2.实验目的在汽车毫米波雷达系统研制过程中,经常会碰到各式各样的问题,譬如系统波形的选择和设计、系统链路的设计、信号处理算法的选择、微波电路的设计调试、天线的设计。
主要的问题主要体现在系统方案、处理算法模拟、微波电路指标调试及对系统性能的影响上。
典型的例子,在FMCW雷达系统,雷达探测距离分辨率不仅与信号的调制带宽有关,还与FMCW调制的线性度有关。
利用是德科技平台化解决方案,即软件+硬件+工程师,可以很容易的实现雷达系统设计仿真、处理算法验证、微波电路设计测试、天线设计测试。
毫米波雷达实验测试报告

毫米波雷达实验测试报告北京中航开元技术有限公司2016年01月7日编写:谢浩校对:李旭东审阅:秦国连1. 试验概述测试时间:2016 年01 月7 日至8 号;测试地点:北京定陵机场;参与测试人员:梁银生、谢浩、李旭东;测试设备:便携式工控机;测试时长:约120 分钟(单独毫米波60 分钟,联调60 分钟);测试验收方:国家电网公司国网通用航空有限公司。
2.试验照片3. 样机参数防撞雷达样机参数如下:工作频段:毫米波段;发射功率:4W;测量通道:水平1 向;覆盖角度:雷达指向水平扇面(约45°);工作方式:垂直实时测量,水平分层扫描测量;尺寸:① 400 X H250mm 重量:17kg;系统供电:DC28V;功耗:小于120W;对外接口:RS422/485 接口2 路;输出方式:求取反射能量最强的三个距离信息,1Hz输出;4. 飞行科目飞行测试方案说明如下:1) 信号塔作业:飞行高度与信号塔高度4/5 处基本一致,机头对准信号塔,分别测试信号距离1500m、1000m、800m、600m、500m、400m、300m、200m、100m、50m 保持高度各平飞半分钟。
2) 铁塔作业区:飞行高度与信号塔高度4/5 处基本一致,机头对准铁塔,分别测试信号距离1000m、800m、600m、500m、400m、300m、200m、100m、50m 保持高度各平飞半分钟。
3) 成组高压线作业区:飞行高度与成组高压线高度基本一致,机头水平垂直对准高压线,分别测试信号距离1500、1000m、800m、600m、500m、400m、300m、200m、100m 50m保持高度各平飞半分钟。
4) 高大山体区:飞行高度尽量在高大山体的半山腰左右,机头对准山体,分别测试信号距离2500m、1500 、1000m、800m、600m、500m、400m、300m、200m、100m、50m保持高度各平飞半分钟。
4D毫米波雷达PCB环节研究报告
4D毫米波雷达PCB环节研究报告一、引言随着无人驾驶技术的快速发展和广泛应用,4D毫米波雷达作为无人驾驶系统中重要的感知器件,其在安全性和可靠性方面的需求日益增长。
为了提高4D毫米波雷达的性能和可靠性,本研究对其PCB环节进行深入研究。
二、PCB设计原理PCB(Printed Circuit Board)设计是4D毫米波雷达系统中至关重要的一环。
通过合理的PCB设计,可以提高信号传输效率,降低信号干扰,保证系统性能稳定。
本研究针对4D毫米波雷达的特点,采用双层PCB设计方案,以满足系统对高频和高速信号传输的需求。
三、PCB设计流程1.电路原理设计:根据4D毫米波雷达系统的功能需求,制定电路原理图设计方案,包括发射、接收和信号处理等电路。
2.PCB布局设计:通过电路原理图设计进行PCB布局设计,根据信号传输路径、器件位置和规范要求,合理布置电路。
同时考虑电磁兼容和散热等因素,确保电路正常工作。
3.线路走线设计:根据布局设计和走线规范,进行电路的线路走线设计。
采用最短路径、最少拐弯和最小电磁干扰原则,提高信号传输效率。
4.电气规范检查:对设计的PCB进行电气规范检查,包括布线规范、器件间距和焊盘规范等。
确保设计的PCB符合相关规范,满足电路的稳定工作。
四、PCB设计优化1.PCB材料优化:选择适合高频和高速信号传输的优质材料,如高频玻璃纤维布基贴片板。
优化材料可以提高信号传输质量,降低传输损耗。
2.线路长度匹配:对于信号传输速度快的线路,采用线路长度匹配的设计方法,避免信号传输速度不一致产生的时序问题。
3.器件布置优化:合理布置器件位置,缩短信号传输路径,降低信号传输时间延迟和信号损耗。
4.地面层设计:在PCB的内部地面层上布满连续的地面平面,可以有效减少信号层之间的串扰和噪声。
五、实验结果与分析本研究对两种不同设计方案的4D毫米波雷达PCB进行了实验比较。
结果显示,优化后的设计方案在信号传输效率、信号传输质量和稳定性方面均优于传统设计方案。
毫米波雷达实验测试报告

毫米波雷达实验测试报告北京中航开元技术有限公司2016年01月7日编写:谢浩校对:李旭东审阅:秦国连1.试验概述测试时间:2016年01月7日至8号;测试地点:北京定陵机场;参与测试人员:梁银生、谢浩、李旭东;测试设备:便携式工控机;测试时长:约120分钟(单独毫米波60分钟,联调60分钟);测试验收方:国家电网公司国网通用航空有限公司。
2.试验照片3.样机参数防撞雷达样机参数如下:工作频段:毫米波段;发射功率: 4W;测量通道:水平1向;覆盖角度:雷达指向水平扇面(约45°);工作方式:垂直实时测量,水平分层扫描测量;尺寸:Φ400×H250mm;重量:17kg;系统供电:DC28V;功耗:小于120W;对外接口:RS422/485接口2路;输出方式:求取反射能量最强的三个距离信息,1Hz输出;4.飞行科目飞行测试方案说明如下:1)信号塔作业:飞行高度与信号塔高度4/5处基本一致,机头对准信号塔,分别测试信号距离1500m、1000m、800m、600m、500m、400m、300m、200m、100m、50m保持高度各平飞半分钟。
2)铁塔作业区:飞行高度与信号塔高度4/5处基本一致,机头对准铁塔,分别测试信号距离1000m、800m、600m、500m、400m、300m、200m、100m、50m保持高度各平飞半分钟。
3)成组高压线作业区:飞行高度与成组高压线高度基本一致,机头水平垂直对准高压线,分别测试信号距离1500、1000m、800m、600m、500m、400m、300m、200m、100m、50m保持高度各平飞半分钟。
4)高大山体区:飞行高度尽量在高大山体的半山腰左右,机头对准山体,分别测试信号距离2500m、1500、1000m、800m、600m、500m、400m、300m、200m、100m、50m保持高度各平飞半分钟。
5)以上试验作业全部完成后,飞机返航。
毫米波雷达物位计研究报告

毫米波雷达物位计研究报告
一、主题
毫米波雷达物位计研究报告
二、简介
毫米波雷达物位计是利用毫米波技术进行测距的一种传感器。
它广泛应用于化工、石油、冶金、电力等行业中的物位检测。
本报告主要介绍毫米波雷达物位计的原理、优劣势以及应用情况。
三、原理
毫米波雷达物位计利用毫米波探头发射出的短脉冲信号,通过反射回来的信号计算出物体与探头之间的距离。
物位计采用的毫米波波段的频率一般在70~100GHz之间,具有较高的穿透力和较强的抗干扰能力。
四、优点
1.非接触式测量,测量精度高,可适用于高粘度、高温高压等恶劣环境
下的物位检测;
2.无需校准,使用方便,维护成本低;
3.测量范围广,可适用于各种物料、不同物位高度的检测;
4.反应速度快,可以实现实时监测。
五、缺点
1.受天气、大气湿度等因素影响,精度易受到影响;
2.造价较高,一般不适用于小型企业。
六、应用
毫米波雷达物位计广泛应用于化工、石油、冶金、电力等行业中的物位检测。
具体应用场景如下:
1.石化行业:用于储罐、槽内液位的测量和控制;
2.电力行业:用于发电厂燃料库存的监测;
3.冶金行业:用于铁水罐等的物位检测;
4.化工行业:用于液体或颗粒物质的物位检测。
七、结论
毫米波雷达物位计作为一种高精度、高效率、高准确度的物位检测技术,其应用范围较广,可适用于各种物料、不同物位高度的检测。
尽管毫米波雷达物位计的造价较高,但由于其精度高且无需校准,使用方便,因而在大型企业中得到了广泛应用。
毫米波雷达电路设计与实验

研究结论
成功设计并实现了毫米波雷达电路, 该电路具有高灵敏度和高分辨率的特 点,能够准确检测物体的距离和速度 。
与传统雷达相比,毫米波雷达电路具 有体积小、重量轻、功耗低等优点, 适用于各种小型化和便携式的应用场 景。
通过实验验证了毫米波雷达电路的性 能,结果表明该电路在室内和室外环 境下均具有较好的稳定性和可靠性。
安全监控
用于安防监控、入侵检测 和人体检测等场景,提高 安全监控的实时性和准确 性。
毫米波雷达的发展趋势
集成化
随着毫米波雷达技术的不 断发展,未来将实现更小 尺寸、更低成本和更高性 能的集成化设计。
多传感器融合
将毫米波雷达与其他传感 器进行融合,实现更全面 和准确的目标信息获取。
AI赋能
利用人工智能技术对毫米 波雷达数据进行处理和分 析,提高目标识别的准确 性和实时性。
毫米波雷达电路设
02
计
发射电路设计
总结词
发射电路负责产生和调制毫米波雷达的发射信号,是整个雷达系统中的重要组 成部分。
详细描述
发射电路设计需要考虑信号的频率、功率、调制方式以及波形等参数,以确保 发射信号具有足够的能量和合适的调制方式,以实现准确的距离和速度测量。
接收电路设计
总结词
接收电路负责接收反射回来的毫 米波信号,并进行必要的放大、 滤波和混频处理。
电源电路设计
总结词
电源电路负责为整个毫米波雷达电路提供稳定的电源供应,是保证雷达正常工作 的基础。
详细描述
电源电路设计需要考虑电源的稳定性、效率、功耗和安全性等参数,以确保为整 个雷达系统提供稳定、高效的电源供应。同时,还需要考虑电源的散热设计和电 磁兼容性,以确保电源的可靠性和稳定性。
汽车性能实验报告结论

一、实验概述本次汽车性能实验报告针对汽车的多项性能指标进行了全面测试,包括振动动态特性、毫米波雷达探测性能、制动性能、照明系统性能、动力性与经济性以及ABS系统等。
通过一系列的实验和数据分析,我们得出了以下结论:二、振动动态特性测试1. 通过频率响应法和脉冲响应法对汽车整车及零部件进行了振动动态特性测试,结果表明,汽车在正常行驶过程中,振动幅度和频率均在合理范围内,满足使用要求。
2. 实验中,车辆在高速行驶时,车身振动较大,但在合理范围内,不会对驾驶员和乘客造成不适。
三、毫米波雷达探测性能测试1. 实验结果表明,汽车毫米波雷达在近距离和远距离探测方面表现出色,能够满足防撞、辅助变道、盲点检测等功能需求。
2. 随着器件工艺和微波技术的发展,毫米波雷达产品体积越来越小,但性能并未受到影响,仍能满足实际应用需求。
3. 在测速精度、定位精度、距离分辨率、多目标识别等方面,汽车毫米波雷达的性能指标均达到了设计要求。
四、制动性能测试1. 通过道路实验数据分析,真实车辆的制动性能符合国家标准,制动协调时间、充分发出的制动减速度和制动距离等指标均达到预期。
2. 实验中,金龙6601E2客车表现出良好的制动性能,为行车安全提供了有力保障。
五、照明系统性能测试1. 汽车补光照明实验结果表明,在多种光照条件下,汽车照明系统能够提供有效的照明,提升驾驶安全性。
2. 实验数据表明,灯光亮度、色温、均匀性和响应速度等指标均达到设计要求,为夜间行车提供了良好的照明效果。
六、动力性与经济性测试1. 实验结果显示,新能源汽车在动力性和经济性方面表现良好,续航里程普遍达到300公里以上,部分高端品牌已突破600公里。
2. 在充电效率方面,大多数新能源汽车可实现充电1小时,达到满电80%的电量,充电时间平均值从20.3分钟下降到13.6分钟。
七、ABS系统测试1. 通过对桑塔纳XXABS系统的原理图、电路图及实验台进行详细了解,掌握了ABS系统的工作原理、结构及故障诊断方法。
毫米波雷达实习报告
一、实习背景随着科技的飞速发展,雷达技术已经广泛应用于军事、民用、航空航天等多个领域。
其中,毫米波雷达因其具有高分辨率、抗干扰能力强、隐蔽性好等特点,成为雷达技术的研究热点。
为了更好地了解毫米波雷达技术,提高自身的专业技能,我于2021年7月至2021年9月在XX科技有限公司进行了为期两个月的实习。
二、实习目的1. 熟悉毫米波雷达的基本原理和设计方法;2. 掌握毫米波雷达的硬件和软件设计流程;3. 增强实际动手能力和团队协作能力;4. 了解毫米波雷达在各个领域的应用现状和发展趋势。
三、实习内容1. 理论学习实习期间,我首先对毫米波雷达的基本原理进行了深入学习,包括毫米波雷达的工作原理、信号处理、天线设计等。
通过查阅资料、参加讲座等方式,我对毫米波雷达有了全面的认识。
2. 实验操作在实习过程中,我参与了多个实验项目,包括:(1)毫米波雷达发射模块的设计与调试:我负责设计发射模块的电路图,并对其进行调试,确保其输出信号的稳定性和准确性。
(2)毫米波雷达接收模块的设计与调试:我负责设计接收模块的电路图,并对其进行调试,保证接收信号的完整性和可靠性。
(3)毫米波雷达系统级调试:我参与了毫米波雷达系统的整体调试,包括天线匹配、信号放大、信号处理等环节,确保系统性能达到预期要求。
3. 项目实践在实习期间,我参与了XX科技有限公司研发的一款毫米波雷达产品的设计与调试。
具体工作如下:(1)根据项目需求,设计毫米波雷达的硬件电路和软件算法;(2)与团队成员沟通协作,共同解决项目中遇到的问题;(3)对产品进行测试,确保其性能满足要求。
四、实习收获1. 知识收获:通过实习,我对毫米波雷达技术有了更深入的了解,掌握了毫米波雷达的设计与调试方法,提高了自己的专业技能。
2. 技能收获:在实习过程中,我学会了使用各类仪器设备,如示波器、信号发生器等,提高了自己的动手能力。
同时,通过与团队成员的协作,我学会了如何与他人沟通、协作,提高了自己的团队协作能力。
雷达原理课程实验报告

达处观察频谱,在有单峰波形时存下此时时域数据,另一名同学视频记录下显示屏上的速度,
共计测量五次,由得到的三种速度各自取中值。
表 2.1 实验记录
U 盘持有者 开始时间
费慧慧
9:21
聂铨
9:29
李珊
9:40
邹欣颖
9:43
陈飞
9:46
左靖昊
9:50
章文韬
9:58
梁宸玮
10:04
罗静
10:09
数据记录人:罗静、路静
普勒频移现象。根据运动目标回波的多普勒频移 fd 推算目标的相对径向速度。1 人在 4~14m 之间匀速来回走动,雷达根据多普勒频移计算其径向速度。
fd
(Hz)
2vr (m / s) (m)
2.3.2 实验方法
0 0
vr 0,目标接近 vr 0,目标背离
连接雷达、电源、示波器。开电源,4m、9m、14m 处各 1 人定标、计时 1 人在 4~14m 之
雷达原理课程实验报告
第1页
1 实验概述
本实验用毫米波测速雷达进行雷达的户外实验,围绕单目标多目标测速,波束宽度的 测量和雷达方程展开一系列的实验。
1.1 基本信息
本实验用的毫米波测速雷达,单点频连续波(正弦波),中心频率 35GHz(波长 8mm),有 效距离 0~15m(人体目标),天线增益 28dBi 。 1.1.1 实验名称
间匀速来回走动,1 人计算速度 1 人操作示波器,截取一段数据同时高声喊停 1 人立即高声
读出雷达显示数值,另 2 人记录示波器操作人用 U 盘拷贝截取数据和显示,Matlab 画波形并
雷达原理课程实验报告
计算速度比较显示速度、定标速度、计算速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毫米波雷达实验测试报告北京中航开元技术有限公司2016年01月7日编写:谢浩校对:李旭东审阅:秦国连1. 试验概述测试时间:2016 年01 月7 日至8 号;测试地点:北京定陵机场;参与测试人员:梁银生、谢浩、李旭东;测试设备:便携式工控机;测试时长:约120 分钟(单独毫米波60 分钟,联调60 分钟);测试验收方:国家电网公司国网通用航空有限公司。
2.试验照片3. 样机参数防撞雷达样机参数如下:工作频段:毫米波段;发射功率:4W;测量通道:水平1 向;覆盖角度:雷达指向水平扇面(约45°);工作方式:垂直实时测量,水平分层扫描测量;尺寸:① 400 X H250mm 重量:17kg;系统供电:DC28V;功耗:小于120W;对外接口:RS422/485 接口2 路;输出方式:求取反射能量最强的三个距离信息,1Hz输出;4. 飞行科目飞行测试方案说明如下:1) 信号塔作业:飞行高度与信号塔高度4/5 处基本一致,机头对准信号塔,分别测试信号距离1500m、1000m、800m、600m、500m、400m、300m、200m、100m、50m 保持高度各平飞半分钟。
2) 铁塔作业区:飞行高度与信号塔高度4/5 处基本一致,机头对准铁塔,分别测试信号距离1000m、800m、600m、500m、400m、300m、200m、100m、50m 保持高度各平飞半分钟。
3) 成组高压线作业区:飞行高度与成组高压线高度基本一致,机头水平垂直对准高压线,分别测试信号距离1500、1000m、800m、600m、500m、400m、300m、200m、100m 50m保持高度各平飞半分钟。
4) 高大山体区:飞行高度尽量在高大山体的半山腰左右,机头对准山体,分别测试信号距离2500m、1500 、1000m、800m、600m、500m、400m、300m、200m、100m、50m保持高度各平飞半分钟。
5) 以上试验作业全部完成后,飞机返航。
5. 试验测试过程及情况描述1 ) 飞机首先对信号塔进行测试。
过程由远及近。
距离在300m 以上的时候数据无意义跳变,效果不是很明显。
在距离300m 200m 100m 50m效果良好。
2) 然后对铁塔和高压线分别进行测试。
过程由远及近。
距离在300m 以上的时候数据无意义跳变。
偶可以测到距离数值,但数据不持续,存在干扰问题。
在距离300m、200m、100m、50m 是效果良好。
不存在上述干扰问题。
3) 最后对山体进行测试。
没有明显效果。
分析可能是山体的回波效果差。
4) 另设备对飞机无线电存在干扰。
无线电频段已经做了记录。
6. 试验数据1 ) 信号塔300m的数据20160108143142201601081431422016010814314320160108143143201601081431432016010814314420160108143144201601081431442016010814314520160108143146 200m的数据20160108134732201601081347332016010813473320160108134734201601081347342016010813473520160108134735201601081347362016010813473620160108134737 274.6 286.8 292.9 274.6 286.8 292.9 323.4 329.5 335.6 323.4 329.5 335.6 323.4 329.5 335.6 311.2 317.3 396.7 305.1 317.3 323.4 317.3 329.5 335.6 274.6 286.8 366.2 317.3 323.4 329.5189.2 195.3 201.4 189.2 195.3 201.4 183.1 189.2 195.3 183.1 189.2 195.3 183.1 189.2 195.3 189.2 195.3 201.4 177.0 183.1 195.3 189.2 195.3 201.4 177.0 183.1 189.2 195.3 201.4 225.8100m 的数据2016010813571820160108135718 20160108135718 20160108135719 20160108135719 20160108135719 20160108135720 20160108135720 20160108135727 2016010813572750m 的数据20160108135947 20160108135948 20160108135948 2016010813594820160108135946 56.1 65.3 68.9 20160108135946 54.9 65.9 70.1 20160108135947 59.8 67.1 70.120160108135947 48.8 54.9 55.5 110.4 111.6 112.3 110.4 111.0 111.6 110.4 111.0 111.6 110.4 111.0 111.6 110.4 111.0 111.6 104.9 111.0 112.3 95.2 95.8 98.2 95.2 103.7 104.3 102.5 104.9 106.8 80.5 90.3 98.848.8 54.9 55.5 41.5 44.5 49.4 52.4 54.9 56.1 52.4 54.9 56.120160108135949 65.9 70.8 71.420160108135949 55.5 70.8 74.4 2) 铁塔300m的数据20160108143058 305.1 311.2 317.320160108143058 305.1 311.2 317.320160108143058 244.1 268.5 305.120160108143059 292.9 299.0 305.120160108143059 305.1 311.2 378.420160108143059 268.5 292.9 299.020160108143100 274.6 299.0 305.120160108143101 262.4 268.5 274.620160108143101 262.4 268.5 274.620160108143101 292.9 305.1 427.2200m的数据20160107154807 189.2 195.3 201.4195.3 201.4 207.5 2016010715480820160107154808 195.3 201.4 207.5189.2 195.3 201.4 2016010715480820160107154809 183.1 189.2 195.320160107154809 183.1 189.2 195.320160107154810 195.3 201.4 207.5201601071548102016010715481020160107154810 100 m的数据201601081404372016010814043820160108140438201601081404382016010814043920160108140439201601081404392016010814044020160108140442 50m的数据2016010814001820160108140018201601081400192016010814001920160108140019201601081400202016010814002020160108140020 189.2 213.6 219.7 213.6 231.9 238.0 207.5 231.9 238.0103.7 104.3 104.9 111.6 262.4 268.5 111.6 262.4 268.5 108.6 622.5 665.2 108.0 292.9 299.0 108.0 292.9 299.0 111.0 506.5 524.9 106.2 323.4 366.2 111.6 292.9 469.953.7 55.5 58.5 43.3 44.5 49.4 49.4 50.0 50.6 48.8 49.4 50.0 46.3 46.9 47.6 45.7 46.3 46.945.7 46.3 46.946.9 47.6 48.220160108140021 47.6 49.4 50.0 3) 高压线组300m的数据20160108143032 299.0 335.6 341.720160108143032 299.0 335.6 341.720160108143033 305.1 311.2 329.520160108143033 305.1 317.3 329.520160108143033 305.1 317.3 329.520160108143034 305.1 311.2 347.920160108143034 292.9 299.0 305.120160108143034 292.9 299.0 305.120160108143036 341.7 360.1 366.220160108143038 286.8 292.9 299.0 200m的数据20160107155104 219.7 225.8 238.020160107155104 20160107155104 219.7 238.0 244.1 219.7 238.0 244.120160107155105 20160107155105 20160107155105 20160107155106 183.1 189.2 195.3 189.2 201.4 207.5 189.2 201.4 207.5 213.6 219.7 225.820160108140021 47.6 48.2 50.0精品文档201601071551062016010715510620160107155107 100 m的数据20160108140203201601081402042016010814020420160108140204201601081402052016010814020520160108140205201601081402062016010814020620160108140206 50m的数据20160108140005201601081400052016010814000620160108140006201601081400062016010814000720160108140007 195.3 213.6 219.7 195.3 213.6 219.7 213.6 219.7 225.890.3 92.7 97.0 89.1 90.9 92.7 92.7 93.3 96.4 92.7 93.3 96.4 100.7 102.5 103.1 99.4 100.0 100.7 100.0 100.7 101.3 90.3 90.9 91.5 86.0 86.6 87.2 81.7 95.2 96.449.4 50.0 50.6 48.8 50.6 51.8 42.7 45.1 48.8 51.2 51.8 52.4 51.2 51.8 52.4 38.4 41.5 42.1 50.0 53.7 54.3精品文档11欢。