汽车起重机液压系统设计
起重机液压系统设计
液压系统设计项目汽车起重机液压系统设计项目目标:1能够理解单向阀的类型、结构工作原理。
2、理解单向阀的用途3、能进行锁紧回路的油路分析4、应用液压仿真软件模拟运行动作实训步骤:1、采用仿真软件机床液压系统原理图2、手动控制模拟吊车液压系统工作状态3、分析动作液压回路的工作情况,如;压力、流量等。
项目要求:在吊装机液压系统中,要求执行元件在停止运动时不受外界影响而发生漂移或窜动,也就是要求液压缸或活塞杆能可靠地停留在行程的任意位置上。
应选用何种液压元件来实现这一功能呢?在实际应用中常用单向阀或液控单向阀来实现这个动作要求项目分析:通过学习,我们知道液压传动系统中执行机构(液压缸或活塞杆)的运动是依靠换向阀来控制的,而换向阀的阀芯和阀体间总是存在着间隙,这就造成了换向阀内部的泄漏。
若要求执行机构在停止运动时不受外界的影响,仅依靠换向阀是不能保证的,这时就要利用单向阀来控制液压油的流动,从而可靠地使控制执行元件能停在某处而不受外界影响。
该任务中,吊装机液压系统对执行机构的来回运动过程中停止位置要求较高,其本质就是对执行机构进行锁紧,使之不动,这种起锁紧作用的回路称为锁紧回路。
图所示便是采用液控单向阀的锁紧回路。
换向阀左位工作时,压力油经左液控单向阀进入液压缸左腔,同时将右液控单向阀打开,使液压缸右腔油液能流回油箱,液压缸活塞向右运动;反之,当换向阀右位工作时,压力油进入液压缸右腔并将左液控单向阀立即关闭,活塞停止运动。
为了保证中位锁紧可靠换向阀宜采用H型或Y型。
由于液控单向阀的密封性能很好,从而能使执行元件长期锁紧。
这种锁紧回路主要用于汽车起重机的支腿油路和矿山机械中液压支架的油路。
液压系统图图1为汽车液压吊车支腿液压系统原理图图2为汽车液压吊车起重液压系统原理图手动阀操作系统工作情况A B C D E F 前肢腿液压缸后肢腿液压缸回转液压马达升缩液压缸变幅液压缸起升液压缸制动液压缸左中中中中中放下不动不动不动不动不动制动右收起中左不动放下右收起中左不动正转右反转中左不动缩回右升出中左不动减幅右增幅中左不动正转松开右反转液压系统工作原理Q2—8型汽车起重机的液压系统属中高系统,用一个轴向柱塞泵做动力源,由汽车发动机通过传动机构驱动工作。
汽车起重机支腿液压系统设计

汽车起重机支腿液压系统设计引言汽车起重机是一种能够进行货物起升、搬运的重型机械设备。
为了确保其安全运行和稳定性,起重机上配备了支腿系统,用于支撑整个机身,使机身保持平衡和稳定。
支腿液压系统是起重机支腿的重要组成部分,本文将介绍汽车起重机支腿液压系统的设计。
液压系统工作原理液压系统采用液体的流动来传递信号和能量,主要由液压泵、液压缸、液压阀和液压油箱等组成。
在汽车起重机支腿液压系统中,液压泵通过驱动液压油流动,产生压力,将能量传递给液压缸,从而实现支腿的伸缩和支撑。
液压系统设计要点1.液压泵选择为了满足起重机支腿液压系统的工作需求,需要选择合适的液压泵。
液压泵的选择应根据液压系统的工作流量和工作压力来确定。
工作流量与液压缸的活塞面积和速度相关,工作压力与液压系统的负荷和阻力相关。
2.液压缸设计液压缸是起重机支腿液压系统的核心部件,主要用于驱动支腿的伸缩和支撑。
液压缸的设计应考虑到起重机的用途和工作条件。
液压缸的活塞直径和行程决定了液压缸的工作力和位移,需要根据起重机的负荷和高度来选择合适的液压缸。
3.液压阀选择液压阀是液压系统中的控制元件,主要用于调节液压系统的压力和流量,实现液压缸的伸缩和支撑等功能。
液压阀的选择应根据液压系统的需求来确定,常见的液压阀有溢流阀、比例阀和换向阀等。
4.液压油选用液压油是液压系统中的工作介质,负责传递能量和冷却液压系统。
液压油的选用应考虑到起重机的工作环境和温度,一般应选择具有良好的抗氧化性、抗磨性和粘温性的液压油。
5.液压系统的安全措施为了确保起重机支腿液压系统的安全运行,需要在设计中考虑相应的安全措施。
例如,在液压系统中加装过载保护装置,当超负荷时能够自动停止液压泵的运行,避免对起重机和人员的伤害。
此外,还需要在液压系统中设置液压缸行程限位开关,防止液压缸过度伸缩或缩回,影响起重机的工作效果和安全性。
总结汽车起重机支腿液压系统是重要的功能性系统,能够实现起重机的支撑和平衡。
汽车起重机液压系统的工作原理分析及主要设计要点

汽车起重机液压系统在吊车将物体调起回升工作过程中发挥关键性的作用。
为了保证汽车起重机液压系统的工作的稳定性,吊车司机在实际操作中要做到液压系统的分流方式之间转换的流畅。
只有保证这个的前提下,才能保证汽车起重机在工作全程中的安全性。
汽车起重机液压系统的稳定型设计液压系统的启动升起的过程,是根据调整液压油泵和换向按键来实现调速的;这样既能确保液压机的正常工作又不容易发生意外情况。
这种设计既简易又安全可靠,也可保持起吊机构工作速度的细调。
为了稳定操作过程中液压传动系统,有效的开展吊装工作,往往在传送过程中对液压设备的马达供油系统进行调整。
当吊车起重操作系统的升起力度较大时,还要应用到马达降速作用来开展适度的调整,具体的实际操作中还会应用到作用力降低设。
液压系统一般情况下,吊车厂家的液压传动由起升机构,回转机构,变幅机构,伸缩机构和支腿部分等构成。
液压传动系统中的执行机构是根据阀门来完成控制的,换向阀的阀芯和阀体之间会存在这一些缝隙,这会造成换向阀门內部出现泄漏,只是依靠换向阀门是不可能让执行机构在处在不工作状况之下而不受外界影响的,因而还要运用单向阀来操纵液压油的流动,进而安全可靠地使操纵执行元件能停在某处而没受外界影响。
液压汽车起重机的回路设计汽车起重机回转回路的过程中的工作主要是由液压泵、换向阀、平衡阀、液压离合器和液压马达组成。
在这些过程中,回转回路可以充当是吊臂平移物体的功效。
但是在这操作过程中物体移动范围有限。
在采用低速大扭矩液压马达可以省去或减小减速装置,因此机构很紧凑。
但低速大扭矩液压马达成本高,使用可靠性不如高速液压马达,加之可以采用结构紧凑、传动比大的蜗轮传动,高速液压马达在起重机的回转机构中使用非常广泛。
所以总的来说,汽车起重机的回转机构设计为高速液压马达加装制动器的回转。
依据各起重机厂家回路的分析和试验总结,动力源采用双联齿轮泵,是由起重机发动机通过底盘上的分动箱驱动所造成的。
液压泵从油箱中吸油,输出的液压油经手动阀组输送到各个执行元件。
QY16型汽车起重机下车液压系统优化设计
QY16型汽车起重机下车液压系统优化设计汽车起重机的液压系统是其重要组成部分,起着保证起重机正常运行以及实现起重操作的关键作用。
针对QY16型汽车起重机的液压系统进行优化设计,可以提高其工作效率和运行稳定性。
本文将从液压系统的元件选择、系统参数设计、液压系统工作原理等方面进行优化设计。
首先,对于液压系统的元件选择,应选择具有优良性能、稳定可靠的元件。
例如选择高品质的液压泵,能够提供充足的液压力和流量,保证起重机的起重能力。
同时,选用优质的液压油缸和阀门,以提高系统的稳定性和可靠性。
其次,对于系统参数设计,应根据QY16型汽车起重机的具体需求和工作环境进行合理的设计。
液压系统的工作压力、流量和速度等参数需要根据实际情况进行调整,以满足起重机的工作要求。
同时,还应注重系统的安全性设计,如设置安全阀、溢流阀等保护装置,以预防系统超载和压力过高的情况发生。
此外,液压系统的工作原理对于优化设计也非常重要。
液压系统主要由液压泵、液压缸、控制阀和液压油箱等组成。
在起重过程中,液压泵从液压油箱吸油,通过控制阀将液压油送入液压缸,从而实现起重操作。
因此,优化液压系统的工作原理,可以提高系统的工作效率和运行稳定性。
例如,采用双泵并联工作模式,可以提高系统的流量和起重速度;通过合理调整液压缸的尺寸,可以提高系统的起重能力和稳定性。
最后,对于液压系统的优化设计,还需要进行实际的测试和验证。
通过在实际起重场景下的验证测试,可以进一步确认液压系统的性能和可靠性,以及针对优化设计提出合理的改进建议。
综上所述,QY16型汽车起重机下车液压系统的优化设计,需要在元件选择、系统参数设计、工作原理等方面进行综合考虑,以提高起重机的工作效率和运行稳定性。
通过科学合理地设计液压系统,可以提高起重机的负载能力、运行速度和操作稳定性,提升起重机的整体性能,满足实际工作需求。
(完整版)典型液压系统汽车起重机液压系设计毕业设计论文
优秀论文审核通过未经允许切勿外传目录引言............................................................................................................................................正文............................................................................................................................................1.1 液压传动系统的特点.........................................................................................1.2 液压传动应用于汽车起重机上的优缺点 ........................................................2 汽车起重机总体方案设计 ...........................................................................................2.1 传动型式的选定.................................................................................................2.2 动力装置的选定.................................................................................................2.3 起升机构液压油路方案设计 ............................................................................2.4 支臂控制机构液压油路方案设计 ....................................................................2.5 回转机构液压油路方案设计 ............................................................................2.6 支腿机构液压油路方案设计 ............................................................................3 起重机液压系统元件的选择 ......................................................................................3.1汽车起重机液压系统功能、组成和工作特点 ...............................................3.2 典型工况分析及对系统的要求 (1)4 起重机各液压回路组成原理和性能分析 (1)4.1 汽车起重机典型液压系统原理图 (1)4.2 起升回路 (1)4.3 变幅回路 (1)4.4 伸缩回路 (1)4.5 回转回路 (1)4.6 支腿回路 (1)4.7 制动回路 (1)5 起重机液压系统的常见故障及预防 (2)5.1 起重机液压系统的主要故障 (2)5.2 汽车起重机液压系统故障的预防 (2)5.3 起重机液压系统故障的排除 (2)结论 (2)致谢 (2)参考文献 (2)引言汽车起重机是各种工程建筑广泛应用的起重设备,是用来对物料进行起重、运输、装卸或安装等作业的机械设备,在工业和民用建筑中作为主要施工机械而得到广泛运用。
汽车起重机液压系统设计

汽车起重机液压系统设计汽车起重机液压系统设计是指根据起重机的工作原理和要求,设计出满足其运行需求的液压系统。
液压系统是一种通过液体传递压力和控制动作的力传递系统,常用于重型机械设备中。
以下是一种1200字以上的汽车起重机液压系统设计方案:1.系统结构设计汽车起重机液压系统主要包括液压冷却系统、液压动力系统和液压控制系统。
液压冷却系统用于降低液压油温度,确保液压系统的正常工作;液压动力系统主要由液压泵、液压缸和阀门组件等组成,提供液压能量以实现起重机的动作;液压控制系统用于控制液压动力系统的工作状态,实现起重机的精确操作。
2.液压冷却系统设计液压冷却系统采用水冷方式,通过水冷却器降低液压油温度,确保液压系统的稳定工作。
水冷却系统设计应考虑流量、温度和压力等参数,选定适合起重机需求的水冷却器。
同时,还应设置液压油温度传感器和冷却水温度传感器,实时监测液压油和冷却水的温度,并通过控制系统对冷却水流量和泵的运行状态进行控制。
3.液压动力系统设计液压动力系统主要由液压泵、液压缸和阀门组件等组成。
液压泵通过驱动发动机输出液压能量,提供动力给液压缸实现起重机的运行。
液压泵选型时考虑起重机的额定载荷、工作速度和工作环境等因素,选用流量和压力适合的液压泵。
液压缸根据起重机的使用要求和结构设计,选用适当尺寸和压力等级的液压缸。
液压阀门组件包括方向阀、流量阀和压力阀等,通过控制液压动力的通断、流量和压力,实现起重机的精确控制。
4.液压控制系统设计液压控制系统用于控制液压动力系统的工作状态,实现起重机的精确操作。
液压控制系统应包括液压控制阀、传感器和控制器等。
液压控制阀根据起重机的动作要求和功能设计,选用相应数量和类型的液压控制阀,如二位四通阀、比例阀和伺服阀等。
传感器主要包括液压油压力传感器和液压油位传感器,通过监测液压系统中的压力和油位等参数,实时反馈给控制器进行处理。
控制器根据传感器的反馈信号,通过控制液压阀来实现起重机的精确操作,包括起重、下降、伸缩等动作。
QY40型汽车起重机液压系统毕业设计
摘要QY40型汽车起重机液压系统的设计是该型起重机设计过程中最关键的一步。
本文根据液压系统的技术指标对该系统进行整体方案设计,对其功能和工作原理进行分析,初步确定了系统各回路的基本结构及主要元件,按照所给机构性能参数和液压性能参数进行元件的选择计算,通过对系统性能的验算和发热校核,以满足该起重机所要达到的要求。
本文还针对当前汽车起重机所采用的一项先进技术——电液比例控制技术,从原理、控制部件、回路控制、控制措施以及对汽车起重机的影响等进行专题研究。
由此对电液比例控制技术在汽车起重机中的运用给以充分的肯定,对汽车起重机的发展前景有了很大的希望。
关键字: 汽车起重机; 液压系统; 高效节能; 性能参数; 电液比例ABSTRACTModel QY40 automobile crane hydraulic pressure systematic design this type hoist the most key one of the design process.This text analyses , demand to carry on the scheme to work out on this performance systematic in hydraulic pressure.Prove to its function and operation principleHave confirmed the basic structure of system every return circuit and main component tentatively According to giving the organization performance parameters and choice of carrying on the component of performance parameter of hydraulic pressure to calculate Through to the checking computations and generating heat to check of systematic function, in order to respond to the request that this hoist should reachThis text, still to an advanced technology that the automobile crane adopts at present —Control technology of proportion of the electric liquid .Carry on the case study from principle , controlling part , return circuit controlling , control measure and impact on automobile crane ,etc. Therefore give the abundant affirmation to the application of the proportion of the electric liquid in the automobile crane of control technology The development prospect has very great hopes.key words:Crane truck; Hydraulic pressure system; Energy-efficient; Performance parameter; Proportion of the electric liquid目录摘要 (2)ABSTRACT………………………………………………………………错误!未定义书签。
汽车起重机液压系统课程设计
汽车起重机液压系统课程设计一、前言汽车起重机液压系统是起重机的核心部件之一,其质量和性能直接影响到起重机的使用效果和安全性。
为了使学生更好地掌握汽车起重机液压系统的设计原理、操作方法和维护技巧,本课程设计旨在通过理论学习、实验操作和综合实践等多种方式,全面提高学生对汽车起重机液压系统的认识和掌握。
二、课程设计内容1. 汽车起重机液压系统基础知识(1)液压传动的基本概念及优点;(2)液压元件的分类及特点;(3)液压系统的组成及工作原理。
2. 汽车起重机液压系统设计原理(1)汽车起重机液压系统结构分析;(2)汽车起重机液压系统工作原理分析;(3)汽车起重机液压系统参数计算。
3. 汽车起重机液压系统实验操作(1)汽车起重机液压系统元件拆装实验;(2)汽车起重机液压系统调试实验;(3)汽车起重机液压系统故障排除实验。
4. 汽车起重机液压系统综合实践(1)汽车起重机液压系统维修案例分析;(2)汽车起重机液压系统检修方案编制;(3)汽车起重机液压系统故障诊断与解决。
三、课程设计实施步骤1. 确定课程设计目标和任务,并制定详细的计划和时间表;2. 进行理论学习,包括汽车起重机液压系统基础知识和设计原理等内容,并进行相关的实验操作;3. 开展综合实践,包括汽车起重机液压系统维修案例分析、检修方案编制和故障诊断与解决等内容;4. 对学生进行考核评估,包括理论考试、实验操作评估和综合实践考核等环节。
四、课程设计要求和评价标准1. 了解汽车起重机液压系统的基本概念、组成结构及工作原理,掌握其参数计算方法;2. 能够熟练操作汽车起重机液压系统元件的拆装、调试及故障排除工作;3. 具备分析汽车起重机液压系统维修案例、编制检修方案及诊断故障的能力;4. 学生对汽车起重机液压系统的认识和掌握程度达到优秀水平。
五、总结通过本课程设计,学生可以全面深入地了解汽车起重机液压系统的设计原理、操作方法和维护技巧,提高其对汽车起重机液压系统的认识和掌握程度,为今后从事相关工作打下坚实的基础。
汽车起重机的液压系统设计

汽车起重机的液压系统设计1.液压系统的基本组成液压泵负责将液压油从油箱中吸出,通过压力油路输送至执行元件,实现起重机的各种功能。
液压泵的选择应根据起重机的动力需求和工作压力来确定。
执行元件主要包括液压缸和液压马达,用于转化液压能为机械能。
液压缸负责推动伸缩臂的伸缩和旋转平台的旋转,液压马达则用于提供旋转力矩。
控制元件主要包括液控阀、压力阀、流量阀等,用于控制液压系统的流量、压力和方向。
液控阀用于控制执行元件的运动方向,压力阀用于控制系统的工作压力,流量阀用于调节系统的流量。
2.系统设计考虑的主要因素(1)起重机的工作负荷和工作范围:根据起重机的工作负荷确定液压系统的工作压力和流量,根据起重机的工作范围确定液压缸和液压马达的尺寸。
(2)系统的平稳性和安全性:起重机的运行要求平稳性高,液压系统设计应考虑减少振动和冲击的因素,采用减压阀和缓冲装置等来保证系统的稳定性。
同时,系统设计应考虑到安全性,通过设置安全装置来保护起重机在紧急情况下的安全运行。
(3)系统的能效:液压系统的工作效率对于起重机的能耗和功率需求有着重要影响。
设计时应合理选择液压泵和马达的类型和规格,以提高系统的能效。
(4)系统的维护和保养:液压系统的维护和保养是确保系统长期稳定运行的关键。
设计时应考虑到易于维护和保养的因素,如设备的布局合理化、易于更换和维修的部件等。
3.系统设计步骤(1)确定起重机的工作要求和技术指标,包括工作负荷、工作范围、速度等。
(2)根据需求计算液压系统的工作压力、流量和功率等参数。
(3)选择适合的液压泵、液压缸和液压马达等执行元件,并计算其尺寸。
(4)选择合适的液控阀、压力阀、流量阀等控制元件,并设计其控制电路。
(5)设计液压系统的油路,包括油箱容积、油管路的布置和连接方式等。
(6)制定液压系统的维护保养计划,包括定期更换液压油、清洗油路、检查和更换部件等。
总之,汽车起重机的液压系统设计需要全面考虑起重机的工作要求和技术指标,并根据液压原理和技术规范来选择和设计各个组成部分,以实现系统的高效、平稳和安全运行。
汽车起重机液压系统设计
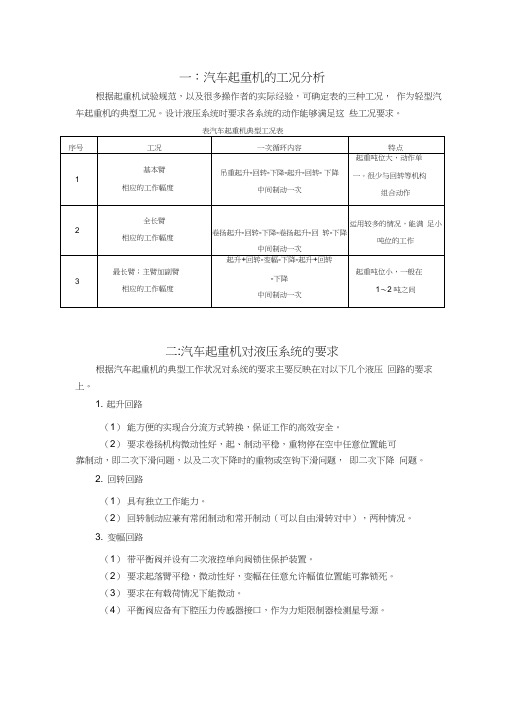
一:汽车起重机的工况分析根据起重机试验规范,以及很多操作者的实际经验,可确定表的三种工况,作为轻型汽车起重机的典型工况。
设计液压系统时要求各系统的动作能够满足这些工况要求。
二:汽车起重机对液压系统的要求根据汽车起重机的典型工作状况对系统的要求主要反映在对以下几个液压回路的要求上。
1. 起升回路(1)能方便的实现合分流方式转换,保证工作的高效安全。
(2)要求卷扬机构微动性好,起、制动平稳,重物停在空中任意位置能可靠制动,即二次下滑问题,以及二次下降时的重物或空钩下滑问题,即二次下降问题。
2. 回转回路(1)具有独立工作能力。
(2)回转制动应兼有常闭制动和常开制动(可以自由滑转对中),两种情况。
3. 变幅回路(1)带平衡阀并设有二次液控单向阀锁住保护装置。
(2)要求起落臂平稳,微动性好,变幅在任意允许幅值位置能可靠锁死。
(3)要求在有载荷情况下能微动。
(4)平衡阀应备有下腔压力传感器接口,作为力矩限制器检测星号源。
4. 伸缩回路本机伸缩机构采用三节臂(含有两个液压缸),由于本机为轻型起重机为了使本机运用广泛,实现各节臂顺序伸缩。
各节臂能按顺序伸缩,但不能实现同步伸缩。
5. 控制回路(1)为了使操纵方便总体要求操纵手柄限制为两个。
(2)操纵元件必须具有45°方向操纵两个机构联动能力。
6. 支腿回路(1)要求垂直支腿不泄漏,具有很强的自锁能力(不软腿)。
(2)要求前后组支腿可以进行单独调整。
(3)要求支腿能够承载最大起重时的压力,并且有足够的防倾翻力矩。
(4)起重机行走时不产生掉腿现象。
三:汽车起重机液压系统的工作原理总成1支腿收放回路由于汽车轮胎支撑能力有限,且为弹性变形体,作业时很不安全,故在起重作业前必须放下前、后支腿,用支腿承重使汽车轮胎架空。
在行驶时又必须将支腿收起,轮胎着地。
为此,在汽车的前、后两端各设置两条支腿,每条支腿均配置有液压缸。
如图前支腿两个液压缸同时用一个三位四通手动换向阀7 控制其收、放动作,而后支腿两个液压缸则用另一个三位四通手动换向阀11 控制其收、放动作。
Q2-8汽车起重机液压系统解析

目录摘要 (1)第1章绪论 (2)1.1国内轮式起重机发展现状 (2)1.2国外轮式起重机发展过程及主要机种 (3)1.3轮式起重机产品的发展趋势 (4)1.4主要工作 (5)第2章起重机技术参数的确定 (6)2.1主要性能参数 (6)2.2Q2-8型汽车起重机参数确定 (6)第3章各液压回路组成原理和性能分析 (8)3.1支腿液压缸收放回路 (8)3.2回转机构液压回路 (10)3.3伸缩机构液压回路 (11)3.4变幅机构液压回路 (12)3.5起升机构液压回路 (13)3.6液压系统的特点 (14)3.7汽车起重机液压系统总成 (15)第4章液压系统计算 (16)4.1汽车起重机液压系统主要液压元件的选择 (16)4.2主要液压辅助装置的选择 (19)总结 (20)参考文献 (21)摘要本次设计的系统是为Q2-8汽车起重机液压系统,它是单作用定量泵系统,采用多路换向阀的串联油路、手动换向阀的合流方式。
本设计论文主要论述了国内外轮式起重机发展概况和发展趋势,并对Q2-8起重机的液压系统进行了设计、计算。
设计的液压系统将泵、马达、液压缸和各种阀有机的组合在一起,以最大化的满足整机的性能。
关键词:汽车起重机;液压系统;设计第1章绪论1.1国内轮式起重机发展现状我国在1957年生产第一台5t机械式汽车起重机到现在己有50年历史,它的生产大致经历了以下几个阶段:1957~1966年以生产5t机械式汽车起重机为主;1967~1976年以生产12t以下小型液压汽车起重机为主;1977~1996,16~50t中大吨位液压汽车起重机产品发展较快。
自1979年开始,我国采用进口汽车底盘和关键液压件自行设计生产出了6t、20t液压汽车起重机之后,国内一些起重机生产厂家采用技贸结合方式,分别引进日本多田野、加藤、美国格鲁夫和德国利勃海尔、克虏伯的起重机产品技术,以合作生产的方式相继制造出25t、35t、45t、50t、80t、125t汽车起重机和25t越野轮胎起重机以及32t、50t、70t全路面起重机。
汽车起重机支腿液压系统设计
汽车起重机支腿液压系统设计摘要本设计在分析汽车起重机的功能、组成和工作特点的基础上,并结合国内外汽车起重机的运用现状和发展趋势,设计了一款中小吨位汽车起重机底盘支腿液压系统。
在设计本机液压系统中,通过阅读大量国内外相关资料和调研市场上已存在产品,对中小吨位汽车起重机的功能和工作原理进行了深入的了解和分析,具体分析了汽车起重机液压系统的功能、组成、工作特点以及系统类型,总结出液压传动在汽车起重机应用中的优缺点。
根据汽车起重机的工作特点对支腿液压系统进行典型工况分析,确定了液压系统要求;结合液压系统原理拟定支腿液压系统底盘分布图、支腿液压管路图。
根据汽车起重机的技术参数对液压系统进行了设计计算,确定了液压系统元件;并结合支腿机构的主要参数对支腿机构强度校核与稳定性分析,对支腿回路的组成原理和性能进行分析;通过对系统压力损失的验算和发热校核,检验液压系统设计的合理性。
关键词:汽车起重机;液压系统;支腿液压;设计计算Hydraulic system design of Outrigger of truck craneABSTRACTThe design analysis of truck crane on the basis of the functions, composition and characteristics of work, application situation and development trend of domestic and international truck crane, designed a hydraulic system for small and medium tonnage truck crane chassis legs. In the design of the hydraulic system, by reading a lot of relevant information already exists on the market and research products at home and abroad, for small and medium tonnage truck crane capabilities and in-depth understanding and analysis of the working principle, specific analysis of crane hydraulic system characteristics and system functions, composition, work type, summary of advantages and disadvantages in application of hydraulic truck crane. Legs according to the characteristics of truck crane hydraulic system analysis of typical conditions, determine the hydraulic system requirements; combination of hydraulic system for hydraulic system developed leg base map, the hydraulic support leg pipe. According to the technical parameters of the crane on the design and calculation of hydraulic systems, hydraulic system components were identified and combined with leg mechanism of main parameters on leg strength and stability analysis of mechanism, composition theory and performance analysis of the leg loops through to system pressure loss calculation and heat checking, inspection of hydraulic system design of rationality.KEY WORDS: Truck crane Hydraulic system, Outrigger hydraulic, Design calculations目录前言 (1)第1章液压系统在起重机上的应用 (2)1.1汽车起重机简介 (2)1.2 QY100K汽车起重机主要性能参数 (3)1.2.1 行驶状态下的主要技术参数如下 (3)1.2.2 作业状态参数 (3)1.2.3 起重臂性能参数 (3)1.2.4支腿技术参数 (3)1.3 液压系统的类型 (3)1.4 液压传动应用于汽车起重机上的优缺点 (4)1.4.1 在起重机的结构和技术性能上的优点 (4)1.4.2 在经济上的优点 (4)第2章下车支腿的确定、支腿液压系统的设计 (6)2.2起重机支腿的选择 (6)2.1.1支腿形式的确定 (6)2.1.2 H形支腿的工作原理 (6)2.2支腿液压回路的设计 (8)2.2.1支腿液压回路的作用 (8)2.2.2支腿液压回路的性能要求 (8)2.2.3 QY100K液压系统原理说明 (8)2.2.4 中小吨位汽车起重机支腿液压回路分析 (11)2.2.5 两种液压支腿回路的比较 (12)第3章起重机支腿液压系统原件的确定 (14)3.1 系统压力的确定 (14)3.1.1 液压系统各回路计算及主要元件的选择 (14)3.2 支腿压力计算 (14)3.2.1 计算工况及载荷 (14)3.2.2 按三点支撑的压力计算 (15)3.3 水平支腿液压缸作用力的确定 (17)3.4 各种液压缸尺寸的确定 (17)3.4.1 垂直液压油缸尺寸的确定 (17)3.5 液压缸伸缩速度及流量的计算 (20)3.5.1 垂直液压缸伸缩速度及流量的计算 (20)3.5.2 水平液压缸伸缩速度及流量的计算 (20)3.6 液压泵的工作压力及排量的确定,液压泵的选择 (21)3.6.1 液压泵额定工作压力的确定 (21)3.6.2液压泵额定流量的计算 (23)3.6.3 液压泵的选择 (23)第4章支腿液压系统附件的选用 (23)4.1液压油箱的设计 (24)4.1.1油箱的基本功能和分类 (24)4.1.2 油箱的设计要点 (24)4.1.3油箱容积确定 (25)4.1.4油箱附件的选取 (27)4.2 油管的确定 (30)4.3液压传动的工作介质(液压油) (32)4.4 液压系统能量的分析与计算 (33)4.4.1 各工况下压力损失的计算 (33)结论 (38)谢辞........................................................................... 错误!未定义书签。
汽车起重机液压系统的设计
汽车起重机液压系统的设计1. 概述汽车起重机液压系统是起重机的重要部分,它通过利用液体的特性来实现起重机的升降、回转和伸缩等功能。
本文将介绍汽车起重机液压系统的设计原理、组成部分以及系统的工作流程。
2. 设计原理汽车起重机液压系统的设计基于以下几个原理:2.1. 液体传动原理液压系统利用液体的压力传递力量。
当液体在密闭管道中被压缩时,压力会均匀传递到液体中,使得液体产生推力。
通过将液体推力传递到不同的液压缸或液压马达上,可以实现起重机的升降、回转和伸缩等动作。
2.2. 流体力学原理液压系统利用流体运动产生的能量来提供力量。
当液体通过窄缝或阀门等狭窄通道时,其速度会提高,同时压力也会增加。
通过合理地设计通道和阀门,可以实现流体的加速和减速,从而控制液压系统的动作速度和力量大小。
3. 组成部分汽车起重机液压系统主要由以下几个组成部分构成:3.1. 液压泵液压泵是液压系统的动力源,它通过驱动装置来产生液体压力。
液压泵的工作原理类似于发动机的工作原理,它利用柱塞或齿轮的运动产生压力,并将液体推送到液压系统中。
3.2. 液压缸液压缸是液压系统的执行机构,它通过液体的推力来实现机械部件的运动。
液压缸通常由液压缸筒、活塞和密封装置等部分组成。
当液压缸接受液体的压力作用时,活塞会产生线性运动,从而实现起重机的升降、回转和伸缩等动作。
3.3. 液压阀液压阀是液压系统的控制装置,它通过控制液体的流动方向、流量和压力来控制液压系统的运动。
液压阀通常由阀体、阀芯和操作机构等部分组成。
根据液压系统的需求,液压系统可能会有多个液压阀,用于实现不同的控制功能。
3.4. 液压油箱液压油箱是液压系统的储液装置,它用于存储液压系统所需的液压油。
液压油箱通常由油箱本体、滤油器和油箱盖等部分构成。
液压油箱还可以具备冷却系统,用于控制液压油的温度,以确保液压系统的稳定工作。
4. 系统工作流程汽车起重机液压系统的工作流程如下:4.1. 系统启动:当起重机启动时,液压泵开始工作,产生液体压力。
QY20B汽车起重机液压系统毕业设计
QY20B汽车起重机液压系统设计1 绪论1.1 汽车起重机简介汽车起重机是将起重机构部分安装在普通汽车或特制汽车底盘上的一种起重机,其驾驶室与起重操纵室分开设置。
这种起重机优点是局域机动性好、适用性强、能在野外作业、操作简便灵活、转移迅速,广泛应用于交通运输、城市建设、消防救援、材料搬运等领域。
缺点是起重作业时须支腿,以保证必要的稳定性。
不能负荷行驶,也不适合在松软或泥泞的场地上工作。
汽车起重机种类繁多,按起重量分类:有轻型(15t以下)、中型(15-25t)、重型(25-50t)、超重型起重机(50t以上)。
按传动装置的动力源分类:有机械传动、电力传动、液压传动三类。
按吊臂的结构形式分类:有折迭式吊臂、伸缩式吊臂和桁架式吊臂汽车起重机三类。
汽车起重机的主要性能参数有最大起重量、整机质量、吊臂全伸长度、吊臂全缩长度、最大起升高度、最小工作半径、起升速度、最大行驶速度等。
1.2 国内外汽车起重机研究动态1.2.1 国内发展趋势随着中国经济的飞速发展,汽车起重机的市场需求也在不断的增大,对汽车起重机的要求也在不断地提高,国内的汽车式起重机的生产企业要想在本领域生存与发展,需要做的事情还很多,在保证起重机性能的基础上还要不断开发出更大吨位的新产品。
主要的发展趋势应该有以下几点:产品品种的多样化以满足不同作业环境要求;增大起重力矩以满足超重型作业需求;增加起重机功能以满足多样化作业要求;全力打造自己的品牌来服务国内市场。
1.2.2 国外发展趋势近年来,随着电子计算机的广泛应用,起重机的设计、制造转向计算机化、自动化。
国外起重机制造商开始应用计算机进行模块设计。
起重机采用模块单元化设计,新产品的研制速度都将大大加快,增强了竞争力;起重机控制元件的革新与应用以提高起重机的定位精度;采用遥控系统来控制汽车式起重机作业,以节省人力,提高工作效率,同时使操作者的工作条件有所改善;研究设计起重机的距离检测防撞装置,降低事故发生率。
汽车起重机支腿液压系统设计
汽车起重机支腿液压系统设计汽车起重机支腿的液压系统是起重机的重要组成部分,通过液压系统可以实现起重机支腿的伸缩、固定和稳定的功能。
设计合理的液压系统可以提高起重机的稳定性和安全性。
下面,我们将介绍汽车起重机支腿液压系统的设计要点。
1.液压系统的基本原理液压系统是利用液体的不可压缩性来传递力和能量的系统。
在汽车起重机的液压系统中,液压油被泵送到液压缸中,通过液压缸的伸缩来实现支腿的升降。
液压系统还包括液压控制阀、油箱、管路和液压油等组成部分。
2.支腿液压系统的设计要点(1)选用合适的液压泵:液压泵的选择要根据所需的液压油流量和压力来确定。
一般情况下,起重机的支腿液压系统的要求较高,需要选择高压、大流量的液压泵,以满足系统的工作需求。
(2)选用合适的液压缸:液压缸的选用要根据支腿的负载和工作要求来确定。
液压缸的直径和行程要满足工作需求,同时还要考虑到液压缸的结构强度和工作寿命等因素。
(3)设置合适的液压控制阀:液压控制阀的选择和设置要根据支腿的操作方式和工作需求来确定。
一般情况下,需要设置液压控制阀来实现液压缸的伸缩、固定和升降等功能,以满足不同工况下的需要。
(4)设计合理的液压管路:液压管路的设计要考虑液压油的流量和压力损失等因素。
合理的管路设计可以减少液压系统的漏油和能量损失。
(5)选用合适的液压油:液压油的选用要考虑液压系统的工作温度、工作压力和环境条件等因素。
合适的液压油可以提高液压系统的工作效率和寿命。
3.其他注意事项(1)液压系统的设计要满足起重机支腿的工作需求,同时要考虑到安全性和维护性。
(2)液压系统的工作过程需要进行严格的检测和调试,确保系统的正常工作。
(3)定期对液压系统进行维护保养,更换液压油和密封件,以确保系统的可靠性和稳定性。
总结起来,汽车起重机支腿液压系统的设计要点包括选择合适的液压泵和液压缸、设置合适的液压控制阀、设计合理的液压管路、选用合适的液压油,同时还要考虑系统的安全性和维护性。
起重机液压系统

收
放
双向液 压锁锁 紧回路
收 放
(1)支腿液压系统
手动换向 阀换向
起吊前,先放下 后支腿,再放下 前支腿。
起吊时,须由支腿 液压缸来承受负载
减少了功率损失。
任务实施
学生分组: 1.画出回路图并对回路进行分析 2.根据回路领取相应液压元件 3.在液压实验台上组装回路 4.运行并验证回路
知识链接:故障诊断与排除
汽车起重机液压系统分析
任务引入
汽车起重机液压系统
起
升
回
图是Q2-8型汽
路
车起重机外形图
支腿液压缸
大臂变幅 回转
分析支腿动作、 起升动作、大臂 伸缩动作、大臂 变幅动作及回转
动作回路
相关知识讲解(1)(1支)支腿腿液液压压系系统统
两个锁紧缸
四个双向 液压锁
手动组合换向阀 四个支腿液压缸
(1)支腿液压系统
相关知识讲解 (4)回转油路
回转机构要求大臂能在任意方位 起吊。本机采用ZMD40柱塞液压马达。
相关知识讲解 该液压系统的特点是:
①因重物在下降 时以及大臂收缩和 变幅时,负载与液 压力方向相同,执 行元件会失控,为 此,在其回油路上 必须设置平衡阀。
②采用手动弹簧复位的多路换向阀来 控制各动作。换向阀常用M型中位机能。 当换向阀处于中位时,各执行元件的进油 路均被切断,液压泵出口通油箱使泵卸荷,
作业结束后,先 收前支腿,再收 后支腿。
(1)支腿液压系统
特点: 1.利用液控单向阀的双向液压锁锁紧回路,锁紧
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一:汽车起重机的工况分析根据起重机试验规范,以及很多操作者的实际经验,可确定表1.1的三种工况,作为轻型汽车起重机的典型工况。
设计液压系统时要求各系统的动作能够满足这些工况要求。
二:汽车起重机对液压系统的要求根据汽车起重机的典型工作状况对系统的要求主要反映在对以下几个液压回路的要求上。
1. 起升回路(1)能方便的实现合分流方式转换,保证工作的高效安全。
(2)要求卷扬机构微动性好,起、制动平稳,重物停在空中任意位置能可靠制动,即二次下滑问题,以及二次下降时的重物或空钩下滑问题,即二次下降问题。
2. 回转回路(1)具有独立工作能力。
(2)回转制动应兼有常闭制动和常开制动(可以自由滑转对中),两种情况。
3. 变幅回路(1)带平衡阀并设有二次液控单向阀锁住保护装置。
(2)要求起落臂平稳,微动性好,变幅在任意允许幅值位置能可靠锁死。
(3)要求在有载荷情况下能微动。
(4)平衡阀应备有下腔压力传感器接口,作为力矩限制器检测星号源。
4. 伸缩回路本机伸缩机构采用三节臂(含有两个液压缸),由于本机为轻型起重机为了使本机运用广泛,实现各节臂顺序伸缩。
各节臂能按顺序伸缩,但不能实现同步伸缩。
5. 控制回路(1)为了使操纵方便总体要求操纵手柄限制为两个。
(2)操纵元件必须具有45°方向操纵两个机构联动能力。
6. 支腿回路(1)要求垂直支腿不泄漏,具有很强的自锁能力(不软腿)。
(2)要求前后组支腿可以进行单独调整。
(3)要求支腿能够承载最大起重时的压力,并且有足够的防倾翻力矩。
(4)起重机行走时不产生掉腿现象。
三:汽车起重机液压系统的工作原理总成1支腿收放回路由于汽车轮胎支撑能力有限,且为弹性变形体,作业时很不安全,故在起重作业前必须放下前、后支腿,用支腿承重使汽车轮胎架空。
在行驶时又必须将支腿收起,轮胎着地。
为此,在汽车的前、后两端各设置两条支腿,每条支腿均配置有液压缸。
如图3.1前支腿两个液压缸同时用一个三位四通手动换向阀7控制其收、放动作,而后支腿两个液压缸则用另一个三位四通手动换向阀11控制其收、放动作。
为确保支腿能停放在任意位置并能可靠地锁住,在支腿液压缸的控制回路中设置了双向液压锁。
当三位四通手动换向阀7工作在右位时,前支腿放下,其油路为:进油路:过滤器2→液压泵3→手动换向阀5左位→手动换向阀7右位→前支腿液压缸上腔。
回油路:前支腿液压缸下腔→液控单向阀→手动换向阀7右位→支腿回路安全阀→油箱。
当三位四通手动换向阀7工作在左位时,前支腿收回,其油路为:进油路:过滤器2→液压泵3→手动换向阀5左位→手动换向阀7左位→前支腿液压缸下腔。
回油路:前支腿液压缸上腔→液控单向阀→手动换向阀7左位→支腿回路安全阀→油箱。
后支腿液压缸用三位四通手动换向阀11控制,其油路流动情况与前支腿油路类似。
2吊臂变幅回路吊臂变幅是通过改变吊臂的起落角度来改变作业高度。
吊臂的变幅运动由变幅液压缸驱动,变幅要求能带载工作,动作要平稳可靠。
本机为小吨位吊车采用单个变幅液压缸变幅方式。
为防止吊臂在停止阶段因自重而减幅,如图3.1在油路中设置了平衡阀15,提高了变幅运动的稳定性和可靠性。
吊臂变幅运动由三位四通手动换向阀14控制,在其工作过程中,通过改变手动换向阀14开口的大小和工作位,即可调节变幅速度和变幅方向。
吊臂增幅时,三位四通手动换向阀14右位工作,其油路为:进油路:过滤器2→液压泵3→手动换向阀5右位→手动换向阀14右位→平衡阀15中的单向阀→变幅液压缸下腔。
回油路:变幅液压缸上腔→手动换向阀14右位→手动换向阀19中位→手动换向阀20中位→电磁阀33左位→油箱。
吊臂减幅时,三位四通手动换向阀14左位工作,其油路为进油路:过滤器2→液压泵3→手动换向阀5右位→手动换向阀14左位→变幅液压缸上腔。
回油路:变幅液压缸下腔→平衡阀15→手动换向阀14左位→手动换向阀19中位→手动换向阀20中位→电磁阀33左位→油箱。
3吊臂伸缩回路吊臂由基本臂和伸缩臂组成,伸缩臂套装在基本臂内,由吊臂伸缩液压缸驱动进行伸缩运动。
本系统是利用各油缸有效面积差控制伸缩顺,即Ⅰ号伸缩油缸活塞面积大,Ⅱ号伸缩油缸活塞面积小。
各活塞腔是联通的,各油缸活塞杆腔也是联通的。
很显然I号伸缩油缸先伸出,其次是Ⅱ号伸缩油缸伸出。
平衡阀可以保证吊臂在载荷下平稳收缩,同时还可以防止因泄漏或管道破裂而造成吊臂回落。
此外为了保证吊臂回缩时按预定的顺序,不至因自重和滑动阻力变化等因素影响。
平衡阀的开启压力应该设定为足K1大,K2小。
为使其伸缩运动平稳可靠,并防止在停止时因自重而下滑,如图3.1在油路中设置了平衡阀18。
吊臂伸缩运动由三位四通手动换向阀19控制,当三位四通手动换向阀19工作在左位或右位时,分别驱动伸缩液压缸伸出或缩回。
吊臂伸出时的油路为:进油路:过滤器2→液压泵3→手动换向阀5右位→手动换向阀14中位→手动换向阀19右位→平衡阀18中的单向阀→伸缩液压缸下腔。
回油路:伸缩液压缸上腔→手动换向阀19右位→手动换向阀20中位→电磁阀33左位→油箱。
吊臂缩回时的油路为:进油路:过滤器2→液压泵3→手动换向阀5右位→手动换向阀14中位→手动换向阀19左位→伸缩液压缸上腔。
回油路:伸缩液压缸下腔→平衡阀18→手动换向阀19左位→手动换向阀20中位→电磁阀33左位→油箱。
4转台回转回路转台的回转由一个小转矩高速液压马达驱动。
通过行星减速机构减速,转台的回转速度为0~5r/min。
为了提高工作效率,并且确保安全,本系统加装由平衡阀、二次溢流阀、制动器组成的回转缓冲装置。
如图3.1回转液压马达的回转由三位四通手动换向阀20控制,当三位四通手动换向20工作在左位或右位时,分别驱动回转液压马达正向或反向回转。
其油路为:进油路:过滤器2→液压泵3→手动换向阀5右位→手动换向阀14中位→手动换向阀19中位→手动换向阀20左(右)位→正反转平衡阀23→回转液压马达。
回油路:回转液压马达→正反转平衡阀23→手动换向阀20左(右)位→电磁阀33左位→油箱。
5吊重起升回路吊重起升是系统的主要工作回路。
吊重的起吊和落下作业由一个大转矩液压马达驱动卷扬机来完成。
起升液压马达的正反转有一个三位四通换向阀32(如图3.1)控制。
马达转速的调节(即起吊速度) 主要通过改变泵一二分合流方式来实现,还可以通过调节发动机转速及电磁换向阀33的开口来调节。
回路中设有平衡阀30,用以防止重物因自重而下滑。
由于液压马达的内泄漏比较大,当重物吊在空中时,尽管回路中设有平衡阀,重物仍会向下缓慢滑落,为此,在液压马达的驱动轴上设置了制动器28。
当起升机构工作时,在系统油压的作用下,制动器液压缸使闸块松开,当液压马达停止转动时,在制动器弹簧的作用下,闸块将轴抱死进行制动。
当重物在空中停留的过程中重新起升时,有可能出现在液压马达的进油路还未建立起足够的压力以支撑重物时,制动器便解除了制动,造成重物短时间失控而向下滑落。
为避免这种现象的出现,在制动器油路中设置了单向节流阀27。
通过调节该节流阀开口的大小,能使制动器抱闸迅速,而松闸则能缓慢地进行。
6汽车起重机液压系统总成根据各回路的分析得到汽车起重机液压系统的工作原理如图3.1所示。
该系统为中压系统,动力源采用双联齿轮泵,由汽车发动机通过底盘上的分动箱驱动。
液压泵从油箱中吸油,输出的液压油经手动阀组输送到各个执行元件。
整个系统由支腿收放、吊臂变幅、吊臂伸缩、转台回转和吊重起升五个工作回路所组成,且各部分都具有一定的独立性。
整个系统分为上下两部分,除液压泵、过滤器、溢流阀、手动阀组及支腿部分外,其余元件全部装在可回转的上车部分。
油箱装在上车部分,兼作配重。
上下两部分油路通过中心回转接头连通。
支腿收放回路和其他动作回路采用一个二位三通手动换向阀5进行切换。
图3.1 汽车起重机液压系统图表3.2 汽车起重机液压系统的工作情况表7汽车起重机液压系统的特点汽车起重机的液压系统有如下几个特点:1)该系统为双泵双回路、分合流油路、开式、串联系统,采用了换向阀串联组合,不仅各机构的动作可以独立进行,而且在轻载作业时,可实现起升和回转复合动作,以提高工作效率。
2)系统中采用了平衡回路、锁紧回路和制动回路,保证了起重机的工作可靠,操作安全。
3)采用了三位四通手动换向阀换向,不仅可以灵活方便地控制换向动作,还可通过手柄操纵来控制流量,实现节流调速。
在起升工作中,除了分合流油路可方便实现高低速切换外,将节流调速方法与控制发动机转速的方法结合使用,可以实现各工作部件微速动作。
4)各三位四通手动换向阀均采用了M型中位机能,使换向阀处于中位时能使系统卸荷,可减少系统的功率损失,适宜于起重机进行间歇性工作。
注:平衡阀主要的功能不是锁定执行元件的位置,是用来防止执行器失速或惯性冲击的。
四:液压系统计算1汽车起重机液压系统参数的初定最大起重量8吨;最高提升速度max V =18min /m ;吊钩滑轮组倍率为M=6,效率2η=0.95;钢丝绳导向滑轮效率αη=0.95;起升卷筒上钢丝绳最外层直径max D =400mm ;起升传动比i =20、效率ch η=0.95;参看下表4.1根据液压马达负载,初选系统的工作压力为∆P=20MPa 。
2 起升马达的计算和选择(1) 作用于钢丝绳上的最大静拉力[1]:max 2QS M αηη= 式中S max —作用于钢丝绳上的最大静拉力,N ;Q —起重量, Q=8000kg×9.8N/kg=78400NM —吊钩滑轮组倍率;2η—吊钩滑轮组效率;αη—钢丝绳导向滑轮效率。
max 7840014478.360.950.95S ==⨯⨯N (2)起升马达所受最大扭矩[1]2max max max 2ch S D M i ηΦ= 式中:2Φ—动力系数,2Φ= 1+0.35V ,其中V 是最高起升速度,由于V =18m/min=0.3m/s 则2Φ = 1+ 0.35×0.3 =1.105;S max —作用于钢丝绳上的最大静拉力,N ;max D —起升卷筒上钢丝绳最外层直径,max D =400mm ;i —起升传动比,i =20;ch η—起升效率,ch η=0.95。
max 1.10514478.30.4168.412200.95M N m ⨯⨯==⋅⨯⨯ (3)液压马达的排量[2] max 2m m M Q P πη=∆ 式中:M max —起升马达受到的最大扭矩,M max =168.41 N m ⋅;∆P —系统的工作压力,∆P=20Mpa ;m η—液压马达机械效率,通常取m η= 0.92;362 3.14168.4157.48/20100.92m Q cm r ⨯⨯==⨯⨯ (4)液压马达转速[1] max max max MiV n D π=式中:M —吊钩滑轮组倍率; i —起升传动比,i =20;max V —最高提升速度,max V =18min /m ;max D —起升卷筒上钢丝绳最外层直径,max D =400mm ;max 620181720/min 3.140.4n r ⨯⨯==⨯ (5) 液压马达的选择根据马达所受到的压力、最大扭矩以及需要的转速和排量查[2]表3.2-3决定采用型号为CM4型的齿轮马达,该马达的具体参数如下:额定压力为20MPa ,转速150~2000r/min ,排量40~63ml/r ,输出转矩115~180m N ⋅。