后处理软件处理及坐标转换
ug极坐标后处理制作

ug极坐标后处理制作
UG是一种计算机辅助设计(CAD)软件,它提供了一套强大的工具和功能,用于创建、编辑和处理三维模型。
极坐标后处理是指对UG软件中创建的三维模型进行进一步处理和修改的过程。
制作UG极坐标后处理通常包括以下步骤:
1. 导入模型:使用UG软件导入需要进行极坐标后处理的模型文件。
可以从其他CAD软件或者通过绘图工具创建的模型文件进行导入。
2. 构建极坐标系统:在UG中,可以通过创建轴线、轴线法向量和轴线旋转等方式来构建极坐标系统。
根据具体需要,可以选择不同的坐标系来进行后处理操作。
3. 进行后处理操作:在极坐标系统下,可以使用UG软件提供的各种工具和功能对模型进行后处理操作。
例如,可以对模型进行旋转、缩放、镜像等操作,以达到预期的效果。
4. 保存和输出:完成后处理操作后,可以将修改后的模型保存为UG支持的文件格式,如UGS文件或者STL文件。
也可以将模型导出为其他常见的三维模型格式,以便在其他CAD软件或者打印机中使用。
UG极坐标后处理制作要根据具体的设计需求进行操作,可以根据不同的项目和模型的要求进行调整和修改。
使用UG软件
的极坐标后处理功能,可以更好地完成三维模型的设计和处理工作。
海德汉后处理 坐标系
海德汉后处理坐标系一、坐标系的概念在海德汉后处理中,坐标系是用来描述空间中点的位置和方向的一种数学工具。
常见的坐标系有笛卡尔坐标系、柱坐标系和球坐标系等。
在不同的坐标系中,点的位置可以用不同的方式表示,因此选择适合问题特点的坐标系对于后处理的准确性和效率非常重要。
二、坐标系的选择在海德汉后处理中,选择适合问题特点的坐标系是十分关键的。
不同的问题可能适用不同的坐标系。
在一些对称性较强的问题中,如旋转对称问题,可以选择柱坐标系或球坐标系,从而减少计算量。
而在一些三维非对称问题中,如风洞试验等,通常使用笛卡尔坐标系。
三、坐标系的转换在海德汉后处理中,经常需要进行坐标系的转换。
转换坐标系可以使得问题的描述更加方便和准确。
在转换坐标系时,需要考虑坐标轴的旋转、平移和缩放等变换。
常见的坐标系转换有笛卡尔坐标系到柱坐标系、柱坐标系到球坐标系等。
四、坐标系的应用坐标系在海德汉后处理中有着广泛的应用。
例如,在流场可视化中,可以使用笛卡尔坐标系将流场数据映射到二维或三维空间中,以便观察和分析。
在气动力学中,可以使用柱坐标系或球坐标系来描述流体的运动特性,如速度、压力分布等。
在热传导问题中,可以使用笛卡尔坐标系来描述温度场的分布。
五、坐标系的优势和限制不同的坐标系具有不同的优势和限制。
笛卡尔坐标系适用于大部分常规问题,但在描述某些特殊问题时可能比较复杂。
柱坐标系适用于具有轴对称性的问题,但在描述三维非对称问题时可能不够精确。
球坐标系适用于描述球对称问题,但在描述非球对称问题时可能不适用。
六、总结海德汉后处理中的坐标系是解决流体力学问题的重要工具。
选择适合问题特点的坐标系可以提高后处理的准确性和效率。
坐标系的转换和应用可以使问题的描述更加方便和准确。
不同的坐标系具有不同的优势和限制,需要根据问题的特点选择合适的坐标系。
在后处理过程中,合理选择和应用坐标系,可以更好地分析和理解流体力学问题。
HiMAX 多波束采集后处理软件 使用说明书

HiMAX 多波束采集后处理软件使用说明书
目录
1. 概述 .................................................. 1 1.1 软件概述 ............................................. 2 1.2 技术参数 ............................................. 4 1.3 安装与卸载 ........................................... 4 1.4 本章小结 ............................................ 11
HiMAX 多波束采集后处理软件 使用说明书
HiMAX 多波束采集后处理软件使用说明书
手册修订情况
文件编号:YFZ-2016-1341
修订日期
修订次数
说明
HiMAX 多波束采集后处理软件使用说明书
2018 年 12 月
1
A0 版本
2019 年 8 月
HiMAX 多波束采集后处理软件使用说明书 2
6. 船形设计 ............................................. 35
IV
HiMAX 多波束采集后处理软件使用说明书
6.1 船形设计 ............................................ 36 6.2 本章小结 ............................................ 37 7. 计划线设计 ........................................... 38 7.1 绘制计划线 ......................................... 39 7.2 计划线块布线 ....................................... 40 7.3 编辑计划线块 ........................................ 48 7.4 导入导出计划线 ...................................... 62 7.5 快捷键 .............................................. 62 7.6 其他功能 ............................................ 63 7.7 常见问题介绍 ........................................ 63 7.8 本章小结 ............................................ 64 8. 电子海图 ............................................. 65 8.1 海图导入 ............................................ 66 8.2 海图显示 ............................................ 69 8.3 海图查询 ............................................ 70 8.4 本章小结 ............................................ 71 9. 工程底图 ............................................. 72 9.1 工程底图管理 ........................................ 73 9.2 工程底图显示 ........................................ 74 9.3 本章小结 ............................................ 75 10. 多波束测量 ........................................... 76
GPS数据后处理实现坐标转换的方法与技巧
GPS数据后处理实现坐标转换的方法与技巧GPS(全球定位系统)是一种利用卫星信号确定精确位置的技术,被广泛应用于地理测量、导航和定位等领域。
然而,由于不同国家和地区的坐标系统差异以及GPS测量误差等因素的影响,对于使用GPS获取的坐标数据进行后处理和转换是非常必要的。
在本文中,将探讨一些实现坐标转换的常用方法和技巧。
一、选择合适的转换模型在进行GPS数据后处理时,首先需要确定要使用的坐标转换模型。
常见的坐标转换模型包括七参数、四参数、三参数以及普通的放大、平移和旋转等。
选择合适的模型取决于具体的应用和准确度要求。
例如,如果需要将GPS测量的坐标转换到不同的地理坐标系统上,可以选择使用七参数或四参数模型。
而在局部坐标转换和粗略测量中,普通的平移和旋转可能已足够。
二、使用地理基准数据进行修正GPS测量的坐标通常是基于WGS84(世界大地测量系统)椭球体模型计算得到的。
然而,不同国家和地区可能使用不同的大地水准面或参考基准。
因此,为了准确地将GPS测量的坐标转换到目标坐标系统上,需要使用地理基准数据进行修正。
这些基准数据通常包括大地水准面参数、坐标转换参数和地方大地系统等。
三、考虑GPS测量误差在进行GPS数据后处理时,还需要考虑GPS测量误差对坐标转换的影响。
GPS测量误差包括卫星位置误差、多路径效应、大气延迟和钟差误差等。
为了降低误差对坐标转换精度造成的影响,可以使用差分GPS技术进行实时差分或后续差分处理,以提高测量的准确性。
四、使用专业软件进行数据处理对于较为复杂的坐标转换需求,可以使用专业的地理信息系统(GIS)软件进行数据处理。
这些软件通常具有强大的坐标转换功能和各种专业模型,能够满足不同需求的坐标转换任务。
例如,ArcGIS、AutoCAD和Global Mapper等软件都提供了丰富的坐标转换工具和文档。
五、进行验证和误差分析坐标转换完成后,需要进行验证和误差分析,以评估转换的准确度和可靠性。
abaqus后处理参考坐标系

abaqus后处理参考坐标系Abaqus是一款强大的有限元分析软件,它可以进行各种复杂的力学分析,如静力学、动力学、热力学等。
在进行分析时,我们需要对结果进行后处理处理,其中参考坐标系是一个重要的概念。
本文将围绕“abaqus后处理参考坐标系”进行详细的讲解。
第一步:建立模型在进行abaqus后处理前,我们需要首先建立模型。
这个模型可以是通过建模软件建立的,也可以是通过abaqus的预处理模块建立的。
无论是哪种方式建立的模型,都需要经过网格划分和分析参数设定的过程。
只有这样,模型才能被提交给abaqus进行分析计算。
第二步:进行分析计算当模型经过分析参数设定后,就可以提交给abaqus进行分析计算了。
在进行计算时,abaqus会根据设定参数,按照一定的计算算法进行计算,并将计算结果输出。
第三步:查看结果当计算完成后,就需要对结果进行查看了。
在abaqus中,可以使用多种方式查看结果,如XY数据图、模态图等。
如果需要进行更深入的后处理,就需要使用abaqus的后处理功能了。
第四步:启动后处理模块在abaqus中,启动后处理模块可以通过点击主界面上的“Results”按钮,在下拉菜单中选择“Visualization”并点击“Abaqus/CAE”选项。
这样,就会进入abaqus的后处理模块了。
第五步:选择参考坐标系在进行后处理时,我们需要选择参考坐标系。
参考坐标系用于描述物体的位置和运动状态。
在abaqus中,可以选择全局坐标系,局部坐标系或者用户定义坐标系作为参考坐标系。
第六步:查看结果一旦选择了参考坐标系,就可以使用abaqus后处理模块的图像显示功能来查看结果了。
这时,我们可以对分析结果进行分析和比较,以便更好地了解结构的行为和性能。
总之,abaqus后处理参考坐标系是一个非常重要的概念。
通过本文介绍的步骤,我们可以了解到如何在abaqus中进行后处理,并选择合适的参考坐标系来查看分析结果。
基于UG NX五轴加工后置处理中的坐标变换
基于UGNX五轴加工后置处理中的坐标变换作者:喻丕珠周定伍周虹来源:《中国新技术新产品》2009年第14期摘要:本文根据UG软件生成的CLS刀位文件和企业具体五轴加工中心,从后置处理中关键部分坐标变化入手,给出了特定五轴加工的坐标变换算法,从而大幅度提高CAM软件中NC程序生成的准确性和减轻了数控编程员工作量。
关键词:B轴;刀心坐标;刀轴;坐标变换1引言随着CAD/CAM软件技术的发展和推广,现在很多企业多采用计算机辅助编程,特别是发动机企业在对复杂零件(如整体叶轮等)进行数控加工时,都是采用大型的CAD/CAM软件(如CATIA、UG等)进行数控编程生成刀具路径,这样大大提高了生产效率及加工精度。
软件通过刀具轨迹计算产生刀位原文件,然后把刀位原文件转换成指定数控机床能执行的NC程序,这样的处理过程就是后置处理。
而不同数控机床的控制系统,机床结构形式和运动方式也存在差异,所使用的NC程序格式也是不一样。
后置处理过程原则上是解释执行,即每读出刀位原文件中的一个完整的记录,便分析该记录的类型,根据记录类型确定是进行坐标变换还是进行文件代码转换,然后根据所选数控机床进行坐标变换或文件代码转换,生成一个完整的数控程序段,并写到数控程序文件(NC文件)中去,其中的坐标变换是多轴加工中后置处理的核心技术。
本文根据UG中刀位原文件的特点和在南方航空动力机械公司的长期工作经验,经严密理论推导,给出一种较为简单且实用的坐标变换方法。
使得编程人员能方便地对特定的数控机床编制后置处理程序,大大减少了设计过程中所需的修改工作量。
2 UG刀位原文件的特点与机床坐标、回转角度的关系利用UGNX软件进行计算机辅助编程时,按规定均视工件静止由刀具运动来完成加工动作,这样可得到一个不针对具体机床的中性刀位文件(CLS文件),在刀位原文件中记录的是刀心坐标和刀轴矢量T。
下面就是一个典型的CLS文件记录。
在记录中,出现的最多的语句是“GOTO/X,Y,Z,I,J,K”,如GOTO/26.5935, 109.4909,25.5759,0.8323781,0.0263269,0.5535825。
LGO软件静态后处理及坐标转换操作流程

LGO软件静态后处理及坐标转换操作流程LGO软件是一款专业的测量数据处理软件,用于处理全站仪、GPS仪等测量设备采集到的原始测量数据。
在使用LGO软件进行数据处理时,通常需要进行静态后处理和坐标转换操作。
下面是LGO软件静态后处理及坐标转换的简要操作流程。
1.导入数据首先,将采集到的原始测量数据导入LGO软件。
可以通过设备连接电脑,直接导入或通过存储介质(如U盘)导入数据。
2.创建观测项目在LGO软件中,需要创建一个新的观测项目来管理相关的测量文件和数据。
可以根据实际需要命名观测项目,并选择数据类型(如全站仪、GPS等)。
3.添加观测文件在创建的观测项目中,需要添加采集到的观测文件。
可以通过“导入”或“拖拽”方式将原始测量文件添加到项目中。
4.数据校正6.基线处理基线处理是静态测量中重要的一步,可以根据基线的几何关系进行数据处理。
在LGO软件中,可以选择合适的处理方法,如最小二乘法、平差法等,并进行计算。
7.坐标计算根据测量数据和基线处理的结果,可以进行坐标计算。
LGO软件提供了多种坐标计算方法,如三角高程法、体积计算法等。
用户可以根据实际需求选择合适的计算方法。
8.坐标转换在实际测量中,可能需要将测量数据转换到不同的坐标系或投影系统。
LGO软件提供了强大的坐标转换功能,可以实现不同坐标系之间的转换,并进行相应的处理。
9.结果输出最后,将处理和计算的结果进行输出。
LGO软件提供了丰富的输出选项,可以生成多种格式的报告和图表,满足用户的需求。
总结:。
航测数据后处理软件及方法推荐
航测数据后处理软件及方法推荐航测数据的后处理在测绘领域中扮演着至关重要的角色。
通过对航测数据的处理和分析,可以得到精确、高质量的地理信息数据,为地理信息系统、土地规划、资源管理等领域提供可靠的数据支持。
本文将推荐几款常用的航测数据后处理软件和方法,并探讨其适用场景和优劣势。
一、航测数据后处理软件1. ENVIENVI是一款功能强大的遥感图像分析软件,具有图像处理、分类、变化检测、目标识别等多种功能。
在航测数据的后处理中,ENVI可以用于影像配准、地物分类和高程模型生成。
它提供了丰富的算法和工具,能够处理不同分辨率的航测数据。
2. Pix4DmapperPix4Dmapper是一款专业的无人机航测数据处理软件,主要用于无人机航测数据的处理和三维建模。
它可以将无人机采集到的航测图像进行自动配准和拼接,生成高精度的地形模型和三维模型。
Pix4Dmapper还提供了丰富的分析工具,可以进行体积计算、变形分析等操作。
3. Erdas ImagineErdas Imagine是一款功能全面的遥感图像处理软件,主要用于航测数据的处理、分析和制图。
它支持多种数据格式,包括数字摄影测量系统(DGPS)、激光雷达、航空摄影等。
Erdas Imagine具有强大的图像处理和分析功能,可以进行几何校正、影像融合、地物提取等操作。
二、航测数据后处理方法1. 影像配准航测数据中的图像可能存在位置偏差和旋转,需要进行影像配准以消除这些误差。
影像配准可以采用基于特征匹配的方法,如SIFT、SURF等,也可以使用控制点进行配准。
其中,SIFT是一种基于局部特征的图像配准算法,可以自动提取图像中的稳定特征点,并通过匹配这些特征点来实现图像配准。
2. 高程模型生成航测数据中的高程信息对于地理信息系统和土地规划非常重要。
高程模型可以通过航测数据中的点云数据或影像进行生成。
常用的高程模型生成方法包括插值法和立体视差法。
插值法可以通过对离散的高程数据进行插值,得到连续的地形表面。
yolov8后处理坐标值计算

yolov8后处理坐标值计算
YOLOv8是一种用于目标检测的深度学习模型,它可以检测图像中的多个对象并给出它们的边界框和类别信息。
在YOLOv8的后处理过程中,会计算出目标的坐标值。
这个过程涉及到一些数学和计算机视觉的知识。
首先,YOLOv8输出的边界框坐标是相对于输入图像的尺寸和坐标系的。
一般来说,这些坐标值是归一化的,即它们的取值范围在0到1之间。
在后处理中,我们需要将这些归一化的坐标值转换为图像的实际坐标值。
其次,YOLOv8输出的坐标值是相对于边界框的中心点、宽度和高度的。
在后处理中,我们需要根据这些相对坐标值和模型预测的特征图大小,计算出边界框的实际坐标值。
这涉及到一些反向计算和缩放操作。
另外,在YOLOv8的后处理过程中,还需要考虑到anchor boxes的影响。
anchor boxes是用来预测不同尺寸和比例的目标的边界框的一种技术。
在后处理中,需要根据anchor boxes的信息对边界框的尺寸进行调整和修正。
总的来说,YOLOv8的后处理过程涉及到坐标值的归一化、反向计算、缩放操作和anchor boxes的调整等步骤。
这些步骤需要结合模型的输出特点和具体的实现细节来进行计算和处理。
希望这些信息可以帮助你更好地理解YOLOv8后处理过程中坐标值的计算。
软件静态后处理及坐标转换操作流程

内容概要
LGO 静态后处理操作
基线处理 平差 坐标转换 困难数据处理
2
一、新建项目与原始数据输入
1、打开LGO软件,点击左侧的项目图标,然后在右侧的“内容”对话 框内用鼠标右键单击“项目”,并选择“新建”来创建一个新项目
2、在出现的对话框内输入新项目的名称,并用鼠标左键单击“确定”。
50
21、在窗口中上面的视图中选择原始数据所在项目,在 下面的视图中选择已知点所在的项目,然后用鼠标左键点 击“匹配”
51
22、窗口显示如上图所示
52
23、在窗口的空白处单击鼠标右键,在下拉菜单中选择“配置”
53
24、选择所需要的转换类型。此处以一步法为例(需要有 三个或更多的已知点才可以使用经典三维),用鼠标左键 单击“确定”
44
15、在0的位置单击鼠标右键输入点标识,在1、2、3的 位置输入坐标类型,如下图所示。
45
16、单击鼠标右键,在下拉菜单中选择输入坐标类型
46
17、用鼠标左键单击“完成”
47
18、用鼠标左键单击“分配”将数据分配到项目中
48
19、可以用鼠标左键点击“调阅/编辑”来查看已知点的信息
49
20、下面的步骤是基准投影(即转换)。用鼠标左键点击 菜单栏上的“工具”,在下拉菜单中选择“基准/投影”
24
三、网平差处理
1、在屏幕下方用鼠标左键单击“平差”,之后在数据视图区域 的空白处单击鼠标右键选择“网平差计算”,进行平差计算。
25
2、平差计算结束后,单击鼠标右键,在“结果”中选择“网” ,可以查看平差报告。平差报告见下图。
26
3、查看平差报告中的F检验,如果显示接受,则表明满足 要求。在“文件”菜单中保存平差报告。 注意:F检验与F检验临界值越接近越好。
mastercam四轴后处理坐标偏移的方法
Mastercam是一款广泛应用于数控加工行业的CAM软件,它可以帮助用户进行零件编程、工艺设计、刀具路径规划等工作。
在使用Mastercam进行四轴数控加工时,经常会遇到坐标偏移的问题。
本文将介绍Mastercam四轴后处理中常见的坐标偏移情况及解决方法,以帮助广大数控加工工作者更好地应对这一难题。
在进行四轴数控加工时,坐标偏移是一个容易出现的问题。
这主要是由于机床坐标系和工件坐标系之间的转换产生的误差。
具体表现在工件的加工精度不高、轮廓不清晰等方面。
为了解决这些问题,需要对Mastercam进行后处理,将加工路径进行调整,使其能够更精确地匹配实际加工情况。
针对Mastercam四轴后处理中的坐标偏移问题,我们可以采取以下方法进行调整和解决:1. 检查加工程序中的坐标系设置在Mastercam中,用户可以根据需要设置不同的坐标系。
在进行四轴数控加工时,一般会涉及到多个坐标系的转换。
需要仔细检查加工程序中的坐标系设置,确保其与实际加工情况一致。
如果发现设置有误,及时进行调整。
2. 重新选择刀具路径在Mastercam中,用户可以根据需要选择不同的刀具路径。
对于四轴数控加工来说,选择合适的刀具路径非常重要。
如果刀具路径选择不当,可能会导致工件加工时出现坐标偏移的情况。
需要对刀具路径进行重新选择,并进行必要的调整。
3. 调整加工参数在进行四轴数控加工时,加工参数的设置对于加工精度和效率都有很大影响。
如果加工参数设置不当,可能会导致坐标偏移的问题。
需要对加工参数进行适当调整,以确保其能够满足实际加工要求。
4. 注意坐标系转换在进行四轴数控加工时,坐标系的转换非常重要。
如果转换不正确,可能会导致坐标偏移的问题。
在进行坐标系转换时,需要格外注意,确保转换的准确性和稳定性。
Mastercam四轴后处理中的坐标偏移是一个常见的问题,但通过合理的调整和解决方法,我们完全可以解决这一难题。
希望本文介绍的方法能够帮助到广大数控加工工作者,使他们能够更加轻松地应对Mastercam四轴后处理中的坐标偏移问题。
Mastercam后置处理文件设定方法说明(转载精品)

MasterCAM后处理文件的修改[转载精品]MasterCAM后处理文件的修改MasterCAM系统缺省的后处理文件为MPFAN.PST,适用于FANUC(法兰克、发那科)数控代码的控制器。
其它类型的控制器需选择对应的后处理文件。
由于实际使用需要,用缺省的后处理文件时,输出的NC文件不能直接用于加工T 蚴牵?⑴进行模具加工时,需从G54~G59的工件坐标系指令中指定一个,最常用的是G54。
部分控制器使用G9 2指令确定工件坐标系。
对刀时需定义工件坐标原点,原点的机械坐标值保存在CNC控制器的G54~G59指令参数中。
CNC控制器执行G54~G59指令时,调出相应的参数用于工件加工。
采用系统缺省的后处理文件时,相关参数设置正确的情况下可输出G55~G59指令,但无法实现G54指令的自动输出。
⑵FANUC.PST后处理文件针对的是4轴加工中心,而目前使用量最大的是3轴加工中心,多出了第4轴数据“A0.”。
⑶不带刀库的数控铣使用时要去掉刀具号、换刀指令、回参考点动作。
⑷部分控制器不接受NC文件中的注释行。
⑸删除行号使NC文件进一步缩小。
⑹调整下刀点坐标值位置,以便于在断刀时对NC文件进行修改。
⑺普通及啄式钻孔的循环指令在缺省后处理文件中不能输出。
使用循环指令时可大幅提高计算速度,缩小NC文件长度。
如果要实现以上全部要求,需对NC文件进行大量重复修改,易于出现差错,效率低下,因此必须对PST(后处理)文件进行修改。
修改方法如下:1、增加G54指令(方法一):采用其他后处理文件(如MP_EZ.PST)可正常输出G54指令。
由于FANUC.PST后处理文件广泛采用,这里仍以此文件为例进行所有修改。
其他后处理文件内容有所不同,修改时根据实际情况调整。
选择【File】>【Edit】>【PST】命令,系统弹出读文件窗口,选择Mpfan.PST文件,系统弹出如下图所示编辑器。
单击按钮,系统弹出查找对话框,输入“G49”,如下图所示:单击按钮,查找结果所在行为:pbld, n, *sgcode, *sgplane, "G40", "G49", "G80", *sgabsinc, e插入G54指令到当前行,将其修改为:pbld, n, *sgcode, *sgplane, "G40", "G49", "G80", *sgabsinc, "G54",e输出的NC文件修改前对应位置指令为:N102G0G17G40G49G80G90修改后变为:N102G0G17G40G49G80G90G54查找当前行的上一行:pbld, n, *smetric, e将其整行删除,或加上“#”成为注释行:#pbld, n, *smetric, e修改后G21指令不再出现,某些控制器可不用此指令。
TGO数据处理与坐标转换教程教程
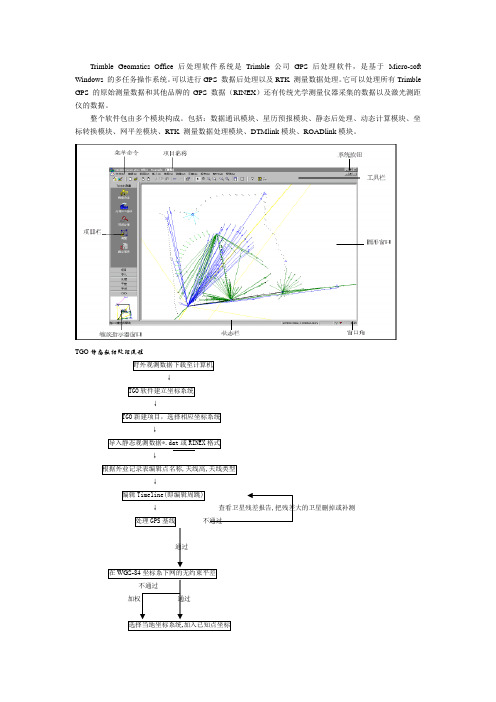
Trimble Geomatics Office后处理软件系统是Trimble公司GPS后处理软件,是基于Micro-soft Windows 的多任务操作系统。
可以进行GPS 数据后处理以及RTK 测量数据处理。
它可以处理所有Trimble GPS 的原始测量数据和其他品牌的GPS 数据(RINEX)还有传统光学测量仪器采集的数据以及激光测距仪的数据。
整个软件包由多个模块构成。
包括:数据通讯模块、星历预报模块、静态后处理、动态计算模块、坐标转换模块、网平差模块、RTK 测量数据处理模块、DTMlink模块、ROADlink模块。
TGO静态数据处理流程野外观测数据下载至计算机↓TGO软件建立坐标系统↓TGO新建项目,选择相应坐标系统↓导入静态观测数据*.dat或RINEX格式↓根据外业记录表编辑点名称,天线高,天线类型↓编辑Timeline(即编辑周跳)↓查看卫星残差报告,把残差大的卫星删掉或补测处理GPS基线不通过通过在WGS-84坐标系下网的无约束平差不通过加权通过选择当地坐标系统,加入已知点坐标↓网的约束平差↓成果输出第一步:数据传输Trimble数据传输Data Transfer软件全中文操作,是Trimble所有产品共用的通讯软件,包括GPS 接收机、手簿控制器、全站仪、电子水准仪、以及GIS数据采集器。
1.各按钮说明,点击此按钮时,PC机开始与所选设备硬件连接。
,点击此按钮时,PC机断开与所选设备的连接。
,表示建立连接后,外部所选设备数据传输至计算机内。
,表示建立连接后,计算机内部数据传输至所选设备内。
2.连接设备(以GPS5700为例)使用串口连接使用USB连接3.各设备名称对应表在设备选项中提供Trimble所有硬件产品的名称,建立设备与计算机连接时,应该选择相对应的设备名称;否则不能建立与计算机的连接。
通过串口建立连接通过USB口建立连接GPS5700接收机GPS Recvr—5000 Series: com1/com2(com1和com2为计算机端口名称)5700USB(自添加GPS5000系列接收机USB端口)5800控制器ACU Survey controller on com1/com2 Survey controller(ACU) on ActiveSync 5700控制器TSCe Survey controller on com1/com2 Survey controller(TSCe) on ActiveSync4600LS 4600LS(自添加GPS4000系列接收机) 否掌上电脑/GeoCE 否WindowsCE上的GIS数据记录器注:5700控制器TSCe和5800控制器/ACU通过USB建立连接前,应该先使用微软的ActiveSync同步软件建立桌面连接。
solidcam后处理详解

solidcam后处理详解SolidCAM是一款先进的机床加工后处理软件,用于将CNC程序转化为机床控制系统可以理解和执行的指令。
它为制造业提供了高效、精确和可靠的后处理解决方案。
本文将详细介绍SolidCAM后处理的原理和功能。
SolidCAM后处理的原理是将CNC程序中的几何信息和加工指令转换为特定机床控制系统所需的指令格式。
它通过对CNC代码进行解析和分析,将几何信息转化为机床坐标系下的运动指令,同时生成机床控制系统所需的其他指令,如刀具补偿、进给速率控制、加工循环等。
SolidCAM能够与各种机床控制系统兼容,如Fanuc、Siemens、Mitsubishi等,可以满足不同机床的后处理需求。
SolidCAM后处理具有丰富的功能和灵活的配置选项。
它可以根据用户的需求和机床的特点,进行定制化的后处理设置。
用户可以通过界面直观地设置加工参数、刀具信息、切削条件等,以及机床控制系统的特定指令格式和通讯协议。
同时,SolidCAM还提供了强大的后处理模板库,用户可以自定义后处理模板,根据需要添加、修改或删除指令,以适应不同的加工任务和机床类型。
SolidCAM后处理还具备高效的优化功能。
它可以自动识别并优化CNC程序中的加工路径,减少加工时间和工具磨损。
通过智能的刀具路径生成算法和切削条件优化算法,SolidCAM可以在保证加工质量的前提下,尽可能地提高加工效率和工具寿命。
此外,SolidCAM还支持多通道后处理,可以同时处理多个刀具和工序,提高整体的生产效率。
SolidCAM后处理还具备强大的仿真和验证功能。
它可以将后处理生成的机床指令以图形化的方式展示出来,用户可以对加工路径、切削条件等进行可视化的验证和调整。
通过与机床模拟软件的集成,SolidCAM可以对加工过程进行全面的虚拟仿真,检查潜在的碰撞、干涉和误差等问题,确保加工过程的安全和可靠。
SolidCAM后处理是一款功能强大、灵活可靠的机床加工后处理软件。
GPS数据后处理实现坐标转换的方法与技巧

GPS数据后处理实现坐标转换的方法与技巧GPS(全球定位系统)是一种利用卫星进行定位的技术,可以在全球范围内提供精确的地理位置信息。
然而,由于GPS数据的不准确性和误差,为了得到更精确的位置信息,需要进行GPS数据后处理并实现坐标转换。
本文将介绍一些常用的方法和技巧,帮助读者更好地进行GPS数据后处理。
1. 数据收集与处理在进行GPS数据后处理之前,需要先收集原始的GPS数据。
通常,在车辆导航、航空、船舶等领域,会使用专业的GPS设备进行数据采集,并导出成标准的数据格式,比如GPX(GPS交换格式)或NMEA(国际海事协会)格式。
接下来,需要将采集到的数据进行预处理。
预处理的目标是去除掉一些无效的或干扰的数据,比如丢失的数据点、偏移的数据点等。
这可以通过数据滤波和插补等方法来实现。
2. 坐标系统转换GPS数据通常使用WGS84坐标系统进行表示,而在实际应用中,往往需要将GPS数据转换为其他坐标系统。
常见的坐标系统包括UTM(通用横轴墨卡托投影)、高斯克吕格投影等。
转换坐标系统的方法有很多,其中一种常用的方法是使用数学模型进行转换。
这些数学模型通常是根据地球椭球体参数来计算的。
在转换过程中,需要注意选择合适的投影方式、中央经线、假东假北等参数,以确保转换结果的准确性。
3. 大地水准面转换在实际应用中,我们可能需要将GPS数据转换为大地水准面(如标高)进行表示。
大地水准面是由海平面和一些参考点所确定的,用于测量地球表面高程的参考面。
转换到大地水准面的方法也有很多,其中一个常用的方法是使用高程基准面模型。
这个模型通常是由一系列的水准测量点所建立的,通过将GPS数据与这些水准测量点进行比对,可以计算出GPS数据相对于基准面的高程。
值得注意的是,大地水准面转换可能会受到地球引力等因素的影响,因此需要进行适当的修正。
4. 数据精度评估在进行GPS数据后处理之后,我们需要评估处理结果的精度。
这是因为GPS数据本身存在误差,因此在后处理过程中也会引入一定的误差。
第五章 LS-DYNA后处理软件lsprepost功能介绍..
动画控制
•First, Last, Inc – 控制第一、最后和增加的数 state,输入后必须回车才 能确认改变
•Time – 当前state的时间值
•State# - 当前 state 数可以输入一个指定的 state
•动画速度控制
滑动条控制
速度增加
速度降低
Hide –排除隐藏的线 Shade – 彩色阴影模式 (平的或平滑的 ) View – 普通的彩色模式 Wire – 线框结构模式wire frame mode Feat – 特征线模式(缺省角度 = 30) Edge – 轮廓线模式? Grid – 使用一彩色像素画节点
菜单和按钮
主菜单按钮 – 主菜单区域的每一个按钮 在动态区激活一个新的界面,该动态区 位于主菜单区的下面
主菜单区域
•Part – 是一个独特的实体,由一单元类型和材料常数 组成。
•Beam(B), Shell(S), Solid(H), Tshell(T), Rsurf(R), Sphnd(P), Fluid(F) 按钮选择或不选择该单元类型 •Singl – 使用左键单击拾取一 part •Area – 在一封闭窗口区域拾取多个 parts •Poly – 在一个封闭的多边形区域拾取多个parts •Part Id list –拾取和拖动而块选择或按住CTRL键进行
ASCII 输出文件
全局统计
*DATABASE_GLSTAT
• 全局能量信息
• 滑动界面能
• 总的能量
• 外功
• 总的能量/初始能量
• 全局 x, y, 和 z 速度
• 动能
• 时间步
• 内能
• 必需*CONTROL_ENERGY 来得到
edem后处理导出颗粒坐标信息

一、概述edem是一种离散元模拟软件,用于模拟颗粒材料之间的相互作用和运动。
在进行模拟过程中,用户往往需要获取颗粒模拟结果的坐标信息,以便进行后续的分析和处理。
edem提供了丰富的后处理功能,可以方便地导出颗粒坐标信息,本文将介绍如何在edem中进行后处理并导出颗粒坐标信息。
二、edem后处理功能概述1. 后处理是对模拟结果进行分析和处理的过程,edem提供了丰富的后处理功能,包括颗粒坐标信息的导出、颗粒分布的可视化、颗粒运动轨迹的分析等。
2. 后处理功能可以帮助用户更好地理解模拟结果,提高模拟的准确性和可靠性。
三、导出颗粒坐标信息的步骤1. 打开edem软件并加载模拟结果文件,进入后处理界面。
2. 在后处理界面的菜单栏中选择“颗粒坐标信息”功能。
3. 在弹出的对话框中设置需要导出的颗粒信息,包括颗粒类型、颗粒属性等。
4. 点击“导出”按钮,选择保存文件的路径和格式,完成颗粒坐标信息的导出。
四、颗粒坐标信息的应用1. 导出的颗粒坐标信息可以用于颗粒分布的分析,包括颗粒的大小分布、位置分布等。
2. 颗粒坐标信息还可以用于颗粒运动轨迹的分析,包括颗粒的速度、加速度、运动路径等。
3. 颗粒坐标信息的导出为后续的模拟分析和处理提供了基础数据。
五、注意事项1. 在导出颗粒坐标信息时,要注意选择合适的颗粒类型和属性,确保导出的信息符合实际需求。
2. 导出的颗粒坐标信息需要进行数据处理和分析,以便得出有意义的结论和结果。
3. 掌握edem后处理导出颗粒坐标信息的方法,有助于提高模拟结果的分析和应用能力。
六、结语edem提供了丰富的后处理功能,可以方便地导出颗粒坐标信息,并通过进一步的分析和处理,为模拟结果的应用提供支持。
掌握导出颗粒坐标信息的方法,对于从事颗粒动力学模拟和分析的研究人员和工程师来说是非常重要的。
希望本文介绍的内容能帮助用户更好地利用edem的后处理功能,提高模拟结果的价值和应用能力。
七、颗粒分布的分析使用edem导出的颗粒坐标信息,可以进行颗粒分布的分析。
TGO软件的使用

新建项目时,坐标系统采用默认值。 网的无约束平差完成之后,意味着得到了 准确的WGS-84系下坐标。 这时不继续进行约束平差,而是直接执行 点校正:选择测量/GPS 点校正
一般情况下,在 “更新缺省投影起 点”、“水平平差” 前划“√”;“设 置比例尺为” 前 不划“√”,让软 件自动计算比例尺; 如果有足够多的已 知高程点也参与平 差,那么在“垂直 平差” 前也划 “√”。
设置查看环闭合差报告的详细内容
查看环闭合差报告
选择报告/GPS 环闭合差报告 建议:只有当所有环闭合差报告都达到相应等级 GPS网规范里的要求,才能进行下 一步的无约束 平差工作。否则应重新解算问题基线,或禁止问 题基线,直到环闭合差全部通过为止。
1.5 GPS网的无约束平差
在平差/基准下选择WGS-84,进行无约束 平差。
进行坐标检查所需要的点数目
进行平差,通过结果报告看未知点坐标,及 坐标误差分量、 边长相对中误差等。
1.7 成果输出
输出坐标 输出基线
输出坐标:选择导出/自定义
输出基线:选择ASC格式文件
1.8 GPS点校正
有些地方采用地方独立坐标,不知道已知点资料 所属坐标系的椭球参数以及投影中央子午线,此 时应采用点校正的方法。一般情况下,采用这种 方法作业时,应该联测三个以上已知点,且已知 点应均匀分布,基本覆盖整个控制网区域。
1.创建新的椭球
进入坐标系统管理器,单击编辑/增加椭球
输入定义坐标系统的椭球名称、地球的长半 轴、扁率,短半轴和偏心率会自动计算出来。
2.创建新的基准转换组
单击增加基准转换/Molodensky(即三参数转 即三参数转 换)
输入基准转换参数
3. 增加坐标系统组和选择投影方式
定制UG后处理程序输出坐标系指令

定制UG后处理程序输出坐标系指令何玉山【摘要】通过定制UG后置处理文件,输出常用坐标系(G54等)及扩展坐标系(G54.1P1等)指令,开发FANUC数控系统专用的后置处理程序,使用定制的UG后处理生成NC程序能够直接应用于数控机床的加工,大大提高自动化应用效率.【期刊名称】《模具制造》【年(卷),期】2018(018)010【总页数】5页(P70-74)【关键词】定制;UG;后处理;输出;坐标系【作者】何玉山【作者单位】永州职业技术学院湖南永州 425100【正文语种】中文【中图分类】TG391;TG6591 引言UG软件是由美国UGS公司研制开发的基于微机的CAD/CAM/CAE软件系统。
自诞生以来,就以其强大的加工功能闻名于世,广泛应用于航空航天、汽车、船泊、机械、医疗器械和电子等诸多领域。
把CAD/CAM软件生成的刀位数据文件转换成指定数控机床能执行的NC数控程序的过程就称为后置处理(Post processing),后置处理是数控加工中自动编程的一个重要环节。
NC程序的生成受软件的后置处理程序的控制,不同数控系统的数控机床对应于不同的后置处理程序。
由于UG自带的后处理程序产生的NC程序不能输出坐标系指令(常用坐标系G54及扩展坐标系指令G54.1P1等),所以用户必须定制适合自己机床的后处理程序。
下面以最常见的FANUC数控铣床或加工中心为例介绍定制UG的后处理程序。
2 定制后处理程序UG坐标系的输出有3种方法:①输出固定坐标系;②利用坐标系下的夹具偏置输出;③利用夹持器输出坐标系;第一、第三种方法有一定弊端,本文重点介绍最实用的第二种方式。
2.1 输出固定坐标系在后处理中采用文本写一个坐标系如:G55G90G80G49,具体操作:运行UG后处理构造器(post_buiider.bat),如果是英文界面,就在optins选项下面的languale语言中选择中文,如图1所示,然后新建一个后处理,在对话框中名称自己确定,勾选主后处理,输出单位为毫米,机床选铣床,控制器选库中的FANUC_6M,如图2所示,单击确定,弹出如图3所示的后处理器编辑对话框,在程序和刀轨选项卡的子选项卡程序中的程序起始序列下面添加一个新块,在块中选择文本,按下鼠标左键拖动添加文字到对话框中心A块位置处,如图4所示,输入要输出的内容如图5所示,连续确定如图6所示后保存。
MASTERCAM后处理的设置和参数修改
MASTERCAM后处理的设置和参数修改后置处理文件简称后处理文件,MASTERCAM后置处理文件是一种可以由用户以回答问题的形式自行修改的文件,其扩展名为.PST。
安装MASTERCAM时系统会自动安装默认的后处理为MPFAN.PST.在应用Mastercam软件的自动编程功能之前,必须先对这个文件进行编辑,才能在执行后处理程序时产生符合某种控制器需要和使用者习惯的NC程序,如果没有全部更正,则可能造成事故. MASTERCAM提供了不同系列的后处理文件,它们在内容上略有不同,但其格式及主体部分是相似的,一般都包括以下部分:1)注释部分。
对后处理文件及其设定方法作一般性介绍.此部分内容一般都不用更改.以下是截取的部分注释:(注释前都带#号,系统在执行代码处理时是不会读取前面带#号的语句的.)# Post Name : MPFAN# Product : MILL# Machine Name : GENERIC FANUC# Control Name : GENERIC FANUC# Description : GENERIC FANUC MILL POST# Associated Post : NONE# Mill/Turn : NO# 4-axis/Axis subs. : YES# 5-axis : NO# Subprograms : YES# Executable : MP v9.0## WARNING: THIS POST IS GENERIC AND IS INTENDED FOR MODIFICATION TO# THE MACHINE TOOL REQUIREMENTS AND PERSONAL PREFERENCE.2) 系统程序规划部分(Debugging and Factory Set Program Switches)。
此部分是MASTERCAM版本的后处理系统规划,每个版本都大同小异,一般不需更改.以下截取的是9.0版的) m_one : -1 #Define constantzero : 0 #Define constantone : 1 #Define constanttwo : 2 #Define constantthree : 3 #Define constantfour : 4 #Define constantfive : 5 #Define constantc9k : 999 #Define constantfastmode : yes #Enable Quick Post Processing, (set to no for debug)bug1 : 2 #0=No display, 1=Generic list box, 2=Editorbug2 : 40 #Append postline labels, non-zero is column position?bug3 : 0 #Append whatline no. to each NC line?bug4 : 1 #Append NCI line no. to each NC line?whatno : yes #Do not perform whatline branches? (leave as yes)get_1004 : 1 #Find gcode 1004 with getnextop?rpd_typ_v7 : 0 #Use Version 7 style contour flags/processing?strtool_v7 : 2 #Use Version 7+ toolname?tlchng_aft : 2 #Delay call to toolchange until move linecant_tlchng : 1 #Ignore cantext entry on move with tlchng_aftnewglobal : 1 #Error checking for global variablesgetnextop : 0 #Build the next variable table3)常规后处理设定部分(General Output Settings)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LGO后处理软件处理及坐标转换
新建项目与原始数据输入
打开LGO软件,打开项目图标,
右击项目新建一个项目
输入项目名称,按确
定。
点击输入,输入原始数据
在电脑上找到您
所存放的原始数
据,打开文件夹,
输入
选择你所需要的原是数据文件(即您在手薄中建立的作业名称),输入
点分配, 观测数据分配到项目中
以上为点输入,以下为基线处理过程。
右击空白处,选择处理
参数
选择显示高级
参数,并可进
行高度角调
整。
选择附加
输出,如下图
点击右键,选择自
动处理模式
点击右键,全部
选择,条状图全
部变绿,再点击
处理,进行基线
解算,解算状态
见下图
解算完毕之后,检查模糊度状态,都为是,点击右键进行存储。
点击结果查看基线等信息,
见下图
进入调阅编辑,然后点击右键进行图形设置,选择数据中的GPS观测值,
基线显示红色。
在此输入外业中没有手簿点的天线高点击无手薄观测的点,再点击箭头所指图标,显示下图所示状态。
输入天线
高,确定
确定。
对所有没有手簿的点都需进行此操作,所以外业中一定要记录相应点的天线高。
到此为止基线处理结束。
以下为网平差处理过程。
点击平差图标,在空白
处点击右键选择网平
差计算,进行平差计
算。
平差结束后,点击右键在
结果中选择网,查看平差
报告,平差报告见下图
查看平差报告中的F 检验,如果显示接受,则表明满足要求。
在文件中保存平差报告。
如果需要WGS84的点成果,点击点图标,然后在空白处击右键选择另存为即可。
F 检验与F 检验临界值越接近越好。
到此为止平差过程结束。
以下是坐标转换操作流程。
输入文件名,如果需要标题,将包含标题打勾即可,然后保存。
在坐标转换之前,我们需要新建一个项
目,用来存放已知点当地坐标。
输入项目名称,
确定,项目建立
完毕。
给已知点当地建一个坐标系统投影,选择坐标系统图标,右击投影,新建。
输入名称,类型选择
TM,出现下图显示
输入伪东坐标常
数,中央子午线,
带宽,然后确定。
投影建立完毕。
右击坐标系统,选择新建
投影类型,确定。
已知点的当地坐标系统建立完毕。
以下是将新建的坐标系统挂在已知点所在项目中。
点击左侧的项目图标,在原始数据所在项目的坐标系统处单击两下左键,显示坐标系统列表,选择WGS84。
如果默认是WGS84坐标则不需要进行修改
(在ASCII 文件输入完毕之后将光标移至下一行,否则可能会出现无法输入现象)
将已知点当地坐标的ASCII 数据输入已知点项目。
点击输入,ASCII 数据
在0的位置击右键输入点标识,在1,2,3的位置输入坐标类型,如下图所示。
点击调阅编辑
图标,查看已
知点的信息
下面进行基准投影(即转换)
点击工具下拉菜单,选择
基准/投影,显示如下图
此处必须选择原始数据所在项目
此处必须选择已知点所在的项目
然后按匹配图标,显示如下图
在空白处右击,选择配置,如下图
选择您所需要的
转换类型,此处
以一步法为例。
(三个点以上才
可使用经典三
维),确定
如果点名一致,选择自动匹
配即可;如果点名不一致,
进行手工匹配,点击两边需
要匹配的点,在阴影处单击
右键选择匹配即可。
匹配结束后,点击结果图
标,查看残差,如下图所
示。
对残差进行检查
如果残差合适,对结
果进行存储,右击空
白处选择存储即可
输入新参数设置
名,将下面的两
个复选框打勾,
然后确定,进入
如下界面
新建立的转换参数自动添加
到原始数据所在项目的坐标
系统中。
点击下方的点图标,选择上方的
LOCAL和格网图标,如图示,即可
显示所有点的地方坐标成果。
流程结束。
右击空白处,选择另存为,将点成果输出保存
困难数据分析及处理
打开基线文件夹,对基线进行分
析
最好小
于0.1
选择双差和L3消除电离层单选
框,对卫星情况进行分析,剔除不
健康卫星如下图。
回到项目中,在
GPS处理参数中将
不健康卫星剔除
如果要对点的卫星时段进行修
改,在基线的点上右击选择卫星
窗口,显示如下图信息。
点击空白
处对开窗
方式进行
设置
选中所需修改卫星,右击,编辑窗口,进行时段的修改。
可对时间段进行修改
修改完毕,确定。
重新进行基线处理,如下图
如果对其他基线进行修改,重复以上操作.。