第8章 渐进法及其他算法简述
递归方程组解的渐进阶的求法迭代法

递归方程组解的渐进阶的求法——迭代法用这个方法估计递归方程解的渐近阶不要求推测解的渐近表达式,但要求较多的代数运算。
方法的思想是迭代地展开递归方程的右端,使之成为一个非递归的和式,然后通过对和式的估计来达到对方程左端即方程的解的估计。
作为一个例子,考虑递归方程:接连迭代二次可将右端项展开为:由于对地板函数有恒等式:(6.10)式可化简为:这仍然是一个递归方程,右端项还应该继续展开。
容易看出,迭代i次后,将有(6.11)而且当时,(6.11)不再是递归方程。
这时:(6.13)又因为[a]≤a,由(6.13)可得:而由(6.12),知i≤log4n,从而,代人(6.14)得:即方程(6.9)的解T(n)=O(n)。
从这个例子可见迭代法导致繁杂的代数运算。
但认真观察一下,要点在于确定达到初始条件的迭代次数和抓住每次迭代产生出来的"自由项"(与T无关的项)遵循的规律。
顺便指出,迭代法的前几步迭代的结果常常能启发我们给出递归方程解的渐近阶的正确推测。
这时若换用代入法,将可免去上述繁杂的代数运算。
图6-1 与方程(6.15)相应的递归树为了使迭代法的步骤直观简明、图表化,我们引入递归树。
靠着递归树,人们可以很快地得到递归方程解的渐近阶。
它对描述分治算法的递归方程特别有效。
我们以递归方程T(n)=2T(n/2)+n2 (6.15)为例加以说明。
图6-1展示出(6.15)在迭代过程中递归树的演变。
为了方便,我们假设n恰好是2的幂。
在这里,递归树是一棵二叉树,因为(6.15)右端的递归项2T(n/2)可看成T(n/2)+T(n/2)。
图6-1(a)表示T(n)集中在递归树的根处,(b)表示T(n)已按(6.15)展开。
也就是将组成它的自由项n2留在原处,而将2个递归项T(n/2)分别摊给它的2个儿子结点。
(c)表示迭代被执行一次。
图6-1(d)展示出迭代的最终结果。
图6-1中的每一棵递归树的所有结点的值之和都等于T(n)。
渐近符号算法

lim
n →∞
f ( n) ≠∞ g ( n)
直观含义: f(n) 的阶不高于g(n)的阶。
7
cg (n)
f (n)
注意: 注意: O(g(n))的定义 的定义 要求任意f(n) =O(g(n)) 要求任意 都是渐进非负的。 都是渐进非负的。
n0
f (n) = Ο( g (n))
12
渐进符号的性质
定理2.2 :对于f1(n)和f2(n) , 如果f1(n) =O(g1(n)), f2(n) =O(g2(n)) ,则必有 f1(n)+ f2(n)= O(max{g1 (n), g2(n)) }) 。 例: O(n2lgn)+O(n2)=O(n2lgn). 推论:对于任意给定的非负函数f (n), g(n),如 果f (n)<=g(n),则f (n)+g(n)=O(g(n))。
14
Homework
page
每组必须完成学号尾数与题号尾数相同的习题
15nLeabharlann 8推论:如果f(n) =Θ(g(n)) ,则必有f(n) = O(g(n)) 。 O符号描述了时间复杂度f(n)的上界, 也就是描述算 法运行的最坏运行时间。 回顾:插入排序算法中主要有2重循环,for循环和 while循环,他们最多各执行n次,所以最坏运行时 间或者说时间复杂度上界为O(n2)。 没有必要计算算法每一行执行的时间以及每行执行 的次数,然后求和,只需要考虑算法中主要循环执 行的次数即可。
n→∞
lim
f (n) g (n)
lim
n →∞
f ( n) = c(0 < c < ∞) g (n)
算法的渐进复杂度分析
算法优化可以降低算法的渐进复杂度, 从而提高算法的效率。常见的算法优化 方法包括选择更高效的算法、减少重复 计算、使用更有效的数据结构等。
算法优化可以减少算法在处理大规模数据时 的计算量和时间复杂度,从而提高算法的实 用性。
算法优化可以改进算法的并行性和 分布式计算能力,从而更好地利用 多核处理器和分布式计算资源,提 高算法的执行效率。
在游戏开发中的算法选择与渐进复杂度分析
要点一
总结词
要点二
详细描述
游戏开发中,算法的渐进复杂度分析有助于优化游戏性能 和提升用户体验。
游戏开发中,算法的选择直接影响到游戏的运行效率和性 能表现。渐进复杂度分析可以帮助我们评估不同算法在游 戏中的性能表现,从而选择适合的算法来优化游戏性能。 例如,对于游戏物理引擎,可以使用碰撞检测和碰撞响应 算法来提高游戏交互性和真实性;对于游戏渲染,可以采 用光线追踪和阴影渲染等技术来提升画面质量和用户体验 。
渐进复杂度分析可以用于比较不同算 法的性能,为实际应用中选择合适的 算法提供依据。
促进学科发展
渐进复杂度分析是计算科学领域的重 要研究方向之一,对算法设计和分析 理论的发展具有重要意义。
未来研究方向与挑战
探索更复杂的算法模型
随着计算科学的发展,越来越多的复杂算法涌现出来,需 要发展更精确、更复杂的渐进复杂度分析方法来评估这些 算法的性能。
THANKS.
渐进复杂度通常用大O表示法来表示 ,例如O(n)、O(n^2)、O(log n)等, 其中n表示输入规模。
为什么关心算法的渐进复杂度
01
算法的效率是衡量算法好坏的重 要标准之一,而渐进复杂度是评 估算法效率的重要指标。
02
通过分析算法的渐进复杂度,可 以了解算法在不同规模输入下的 性能表现,从而在实际应用中选 择合适的算法。
渐进法

BA A
BE
BC
CB
CF
CD D
0.3
0.3 0.4
0.445 0.222 0.333 41.7 -18.5 - 9.3 -13.9 2.2 -1.0 - 0.5 -0.7 24.4 - 9.8 -14.8
FC
40-41.7-9.3=-11
40 B -41.7 -9.3 3.3 3.3 4.4 -0.5 0.15 0.15 0.2
AD 3/9 AC 2/9 10 10
C
CA
D
DA
- 50
10 - 40
- 80
15 - 65 -10 - 10
用力矩分配法计算连续梁和无侧移刚架 取EI=8 μBA=0.6 μBC=0.4 μCB=0.4 μCD=0.6
i=2 B↓↓↓↓↓↓↓↓↓↓↓ A 2EI EI 8m i=1 8m
MB=-128
2
M
i
A
C
∑M= MiA+MiB+MiC-M=0 a)分配力矩
M S
M ij ij M Sij ij S
b)传递弯矩 2、传递系数 Mji=CMij C: j=A,B,C 杆端转动时产生的远端弯矩与近端弯矩 注: 1)传递力矩是杆端转动时产生的远端弯 的比值。即: 矩。 M远 C 2)只有分配弯矩才能向远端传递。 M
4 5
1 AC P P 5
4 QBD BD P P 5
l/2
M图
4P/5
l
l/2
P/5
2Pl/5
18
A
↓↓↓↓↓↓↓↓↓
B 96
↓↓↓↓↓↓↓↓↓
A EI=∞ 10kN/m
渐进分布求法
渐进分布求法
渐进分布是指某种特定分布的大样本性质,即在样本量足够大时的极限分布。
求渐进分布的方法主要有以下两种:
1. 样本数据量足够大时,可以根据样本数据的性质和分布情况推断出总体分布的情况。
如果样本数据符合某种分布的特征,可以认为总体分布也符合该分布的特征。
2. 当样本数据量不足或者无法根据样本数据的分布情况推断总体分布时,可以采用假设检验的方法来求渐进分布。
首先,假设总体分布为某种特定的分布,然后利用样本数据检验该假设的合理性。
如果样本数据支持该假设,则可以认为总体分布符合该假设的分布特征;否则,需要重新假设其他分布特征,直到找到最合理的分布特征为止。
在实际应用中,要根据具体情况选择合适的方法来求渐进分布。
同时,要注意样本数据量和分布特征的合理性,避免出现错误的推断。
水力学课件 第8章 明渠非均匀流w

Q 2
ds ( 2gA2 ) gA3
dA ds
Q 2
gA3
Bdh ds
Fr2
dh ds
3. dhw ds
J
Q2 K2
i dh Fr2 dh J 0
ds
ds
明渠恒定非均匀渐变流的基本方程
dh
iJ
i
Q2 K2
ds 1 Fr2 1 Fr2
(二) 棱柱体明渠渐变流水面曲线形状分析
单位重量流体所具有的机械能
E z p v2 g 2g
断面单位能量
Es
h v2
2g
h
Q2
2 gA2
(1)断面单位能量(cross-sectional unit energy)
1.
E
z0
Es
z0
h
v2
2g
两者区别
2. dE 0 ds
dEs 0; dEs 0; dEs 0 ds ds ds
1)
水跃分类 波 状 水 跃 1 Fr1 1.7 弱 水 跃 1.7 Fr1 2.5 K j 20% 不 稳 定 水 跃 2.5 Fr1 4.5 K j 20% ~ 45% 稳 定 水 跃 4.5 Fr1 9 K j 45% ~ 70% 强 水 跃 9 Fr1 K j 85%
一.明渠水流的两种流态及其判别
1.明渠水流的两种流态
急流(Supercritical flow ) 当底坡陡峻,水流湍急,遇到障 碍物时,水面在障碍物顶上或稍 向上游隆起。但是障碍物对上游 较远处的水流并不发生影响。这 种水流状态称为急流。
一.明渠水流的两种流态及其判别
1.明渠水流的两种流态
缓流Subcritical Flow 底坡平缓,流速较小,遇到 渠底有阻水的障碍物时,在 障碍物处水面形成跌落,而 在其上游则普遍壅高,一直 影响到上游较远处。这种水
渐进法及其它算法简述
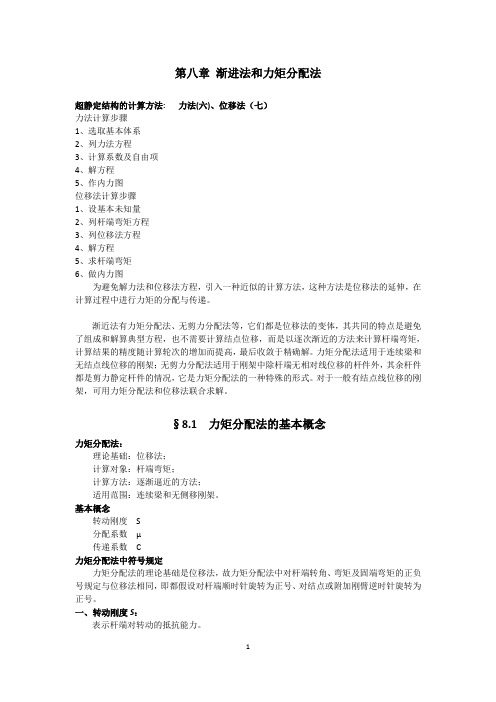
第八章渐进法和力矩分配法超静定结构的计算方法: 力法(六)、位移法(七)力法计算步骤1、选取基本体系2、列力法方程3、计算系数及自由项4、解方程5、作内力图位移法计算步骤1、设基本未知量2、列杆端弯矩方程3、列位移法方程4、解方程5、求杆端弯矩6、做内力图为避免解力法和位移法方程,引入一种近似的计算方法,这种方法是位移法的延伸,在计算过程中进行力矩的分配与传递。
渐近法有力矩分配法、无剪力分配法等,它们都是位移法的变体,其共同的特点是避免了组成和解算典型方程,也不需要计算结点位移,而是以逐次渐近的方法来计算杆端弯矩,计算结果的精度随计算轮次的增加而提高,最后收敛于精确解。
力矩分配法适用于连续梁和无结点线位移的刚架;无剪力分配法适用于刚架中除杆端无相对线位移的杆件外,其余杆件都是剪力静定杆件的情况,它是力矩分配法的一种特殊的形式。
对于一般有结点线位移的刚架,可用力矩分配法和位移法联合求解。
§8.1 力矩分配法的基本概念力矩分配法:理论基础:位移法;计算对象:杆端弯矩;计算方法:逐渐逼近的方法;适用范围:连续梁和无侧移刚架。
基本概念转动刚度S分配系数μ传递系数 C力矩分配法中符号规定力矩分配法的理论基础是位移法,故力矩分配法中对杆端转角、弯矩及固端弯矩的正负号规定与位移法相同,即都假设对杆端顺时针旋转为正号、对结点或附加刚臂逆时针旋转为正号。
一、转动刚度S:表示杆端对转动的抵抗能力。
在数值等于使杆端产生单位转角时需要施加的力矩。
转动刚度SAB 与杆的线刚度i (材料的性质、横截面的形状和尺寸、杆长)及远端支承有关,而与近端支承无关。
二、分配系数设A 点有力矩M ,求M AB 、M AC 和M AD如用位移法求解:A AB A AB AB S i M θθ==4A AC A AC AC S i M θθ==A AD A AD AD S i M θθ==30=∑AM A AD AC ABS S SM θ)(++=∑=++=AAD AC AB A SMS S S M θ所以有M SS M AABAB ∑=M S S M AAC AC ∑= M S S M AAD AD ∑=M M Aj Aj ⋅=μ ∑=AAjAj SS μ 1=∑μ三、传递系数=远端弯矩/近端弯矩M AB = 4 i ABθAM BA = 2 i ABθA在结点上的外力矩按各杆分配系数分配给各杆近端截面,各杆远端弯矩分别等于各杆近端弯矩乘以传递系数。
结构力学I课程标准

“结构力学I”课程标准课程名称:结构力学I英文名称:Structural Mechanics I课程代码:课程类别:专业教育必修课程(专业核心课程)课程学时:56课程学分:3.5适用专业:土木工程先修课程:高等数学、理论力学、材料力学等授课学院:建筑工程学院教研室:土木工程教研室制定人:赵腾飞、袁立群、孟昭博审定人:张绪涛、孟昭博、崔诗才一、课程性质《结构力学I》是土木工程专业必修的专业核心课程之一,将为后续专业课程学习打下良好的基础。
通过本课程的学习,学生在理论力学和材料力学的基础上可以进一步掌握分析计算杆件体系的基本原理和方法,了解各类结构的受力性能,培养学生结构分析与计算的能力,为学习有关专业课程及进行结构设计和科学研究打下基础,并能够应用结构力学基本理论和方法解决工程实际问题。
二、目标要求(一)总体目标掌握结构在荷载、支座移动等因素作用下结构强度、刚度等的分析、计算方法;掌握结构的合理组成形式及分析方法;熟悉结构力学相关的基本概念,了解近似计算方法、了解计算结构力学的相关分析方法。
在头脑中初步建立结构的力学思维方式,能正确应用力学知识对结构的强度、刚度以及结构合理组成进行分析。
(二)具体目标1.知识目标(1)能理解结构力学的一般概念及结构受力、变形等特点;(2)能正确建立力学相关计算模型并对其进行结构几何组成分析;(3)能正确利用多种方法对结构进行受力分析、绘制相应的内力图;(4)能正确通过虚功法求解结构的位移,并能大致绘制结构的变形图。
2.能力目标(1)能熟练计算、绘制静定结构、超静定结构的内力;(2)能熟练求出指定截面的广义位移;(3)能判别平面杆系结构的几何组成合理性。
3.素质目标(1)能将力学知识应用于实际工程中,着力培养工程实践能力;(2)引入前延、后续课程,做好课程衔接,形成课程体系,为后学专业课学习打好基础;(3)培养学生的受力概念、直观受力感觉和力学意识,勇于担当结构安全和经济两大重任。
(完整word版)大学数据结构期末知识点重点总结(考试专用)

第一章概论1。
数据结构描述的是按照一定逻辑关系组织起来的待处理数据元素的表示及相关操作,涉及数据的逻辑结构、存储结构和运算2。
数据的逻辑结构是从具体问题抽象出来的数学模型,反映了事物的组成结构及事物之间的逻辑关系可以用一组数据(结点集合K)以及这些数据之间的一组二元关系(关系集合R)来表示:(K, R)结点集K是由有限个结点组成的集合,每一个结点代表一个数据或一组有明确结构的数据关系集R是定义在集合K上的一组关系,其中每个关系r(r∈R)都是K×K上的二元关系3.数据类型a。
基本数据类型整数类型(integer)、实数类型(real)、布尔类型(boolean)、字符类型(char)、指针类型(pointer)b。
复合数据类型复合类型是由基本数据类型组合而成的数据类型;复合数据类型本身,又可参与定义结构更为复杂的结点类型4.数据结构的分类:线性结构(一对一)、树型结构(一对多)、图结构(多对多)5。
四种基本存储映射方法:顺序、链接、索引、散列6。
算法的特性:通用性、有效性、确定性、有穷性7.算法分析:目的是从解决同一个问题的不同算法中选择比较适合的一种,或者对原始算法进行改造、加工、使其优化8.渐进算法分析a.大Ο分析法:上限,表明最坏情况b.Ω分析法:下限,表明最好情况c.Θ分析法:当上限和下限相同时,表明平均情况第二章线性表1.线性结构的基本特征a.集合中必存在唯一的一个“第一元素”b。
集合中必存在唯一的一个“最后元素"c.除最后元素之外,均有唯一的后继d。
除第一元素之外,均有唯一的前驱2.线性结构的基本特点:均匀性、有序性3。
顺序表a.主要特性:元素的类型相同;元素顺序地存储在连续存储空间中,每一个元素唯一的索引值;使用常数作为向量长度b。
线性表中任意元素的存储位置:Loc(ki)= Loc(k0)+ i * L(设每个元素需占用L个存储单元)c. 线性表的优缺点:优点:逻辑结构与存储结构一致;属于随机存取方式,即查找每个元素所花时间基本一样缺点:空间难以扩充d.检索:ASL=【Ο(1)】e。
龙驭球《结构力学Ⅰ》(第4版)笔记和课后习题(含考研真题)详解(渐进法及其他算法简述)【圣才出品】

第8章渐近法及其他算法简述8.1 复习笔记本章介绍了几种属于位移法类型的渐近方法。
这些渐近方法的基础是力矩分配法,在力矩分配法的基础上,衍生出了适用于不同结构类型的子方法,如无剪力分配法、分层计算法、反弯点法。
渐近法舍弃了一部分精度,但以此换来了更高的效率。
一、力矩分配法的基本概念(见表8-1-1)1.转动刚度、分配系数、传递系数表8-1-1 力矩分配法的基本概念2.基本运算环节(单结点转动的力矩分配)(见表8-1-2)表8-1-2 单结点转动的力矩分配图8-1-1图8-1-2二、多结点的力矩分配(见表8-1-3)表8-1-3 多结点的力矩分配图8-1-3三、无剪力分配法(表8-1-4)表8-1-4 无剪力分配法图8-1-4四、近似法(见表8-1-5)表8-1-5 近似法图8-1-5 分层法五、超静定结构各类解法的比较和合理选用(见表8-1-6)表8-1-6 超静定结构各类解法的比较和合理选用8.2 课后习题详解8-1 试用力矩分配法计算图8-2-1所示结构,并作M图。
图8-2-1解:(a)求固端弯矩M AB F=-F P l/8=-20kN·m,M BA F=F P l/8=20kN·m求分配系数μBA=EI/(EI+EI/2)=1/(1+1/2)=0.667,μBC=(EI/2)/(EI+EI/2)=(1/2)/(1+1/2)=0.333放松B点进行力矩分配(B点的集中力偶应该与固端弯矩一起分配),分配过程如图8-2-2所示,并作出M图如图8-2-2所示。
图8-2-2(b)考虑去掉悬臂部分CD,去掉后在C点施加大小为10kN·m的顺时针力偶矩。
求固端弯矩(注意,C点的附加力偶传递到B点的作用不能忽略)M BC F′=-3F P l/16=-18kN·m(集中力引起)M BC F″=1/2×10kN·m=5kN·m(附加力偶引起)M BC F=M BC F′+M BC F″=-13kN·m,M CB F=10kN·m。
递归方程解的渐近阶的求法

递归方程解的渐近阶的求法递归算法在最坏情况下的时间复杂性渐近阶的分析,都转化为求相应的一个递归方程的解的渐近阶。
因此,求递归方程的解的渐近阶是对递归算法进行分析的关键步骤。
递归方程的形式多种多样,求其解的渐近阶的方法也多种多样。
这里只介绍比较实用的五种方法。
1.代入法这个方法的基本步骤是先推测递归方程的显式解,然后用数学归纳法证明这一推测的正确性。
那么,显式解的渐近阶即为所求。
2.迭代法这个方法的基本步骤是通过反复迭代,将递归方程的右端变换成一个级数,然后求级数的和,再估计和的渐近阶;或者,不求级数的和而直接估计级数的渐近阶,从而达到对递归方程解的渐近阶的估计。
3.套用公式法这个方法针对形如:T (n)=aT (n / b)+f (n) 的递归方程,给出三种情况下方程解的渐近阶的三个相应估计公式供套用。
4.差分方程法有些递归方程可以看成一个差分方程,因而可以用解差分方程(初值问题)的方法来解递归方程。
然后对得到的解作渐近阶的估计。
5.母函数法这是一个有广泛适用性的方法。
它不仅可以用来求解线性常系数高阶齐次和非齐次的递归方程,而且可以用来求解线性变系数高阶齐次和非齐次的递归方程,甚至可以用来求解非线性递归方程。
方法的基本思想是设定递归方程解的母函数,努力建立一个关于母函数的可解方程,将其解出,然后返回递归方程的解。
本章将逐一地介绍上述五种方法,并分别举例加以说明。
本来,递归方程都带有初始条件,为了简明起见,我们在下面的讨论中略去这些初始条件。
递归方程组解的渐进阶的求法——代入法用这个办法既可估计上界也可估计下界。
如前面所指出,方法的关键步骤在于预先对解答作出推测,然后用数学归纳法证明推测的正确性。
例如,我们要估计T(n)的上界,T(n)满足递归方程:其中是地板(floors)函数的记号,表示不大于n的最大整数。
我们推测T(n)=O(n log n),即推测存在正的常数C和自然数n0,使得当n≥n0时有:T(n)≤Cn log n事实上,取n0=22=4,并取那么,当n0≤n≤2n0时,成立。
第8章小桥孔径计算
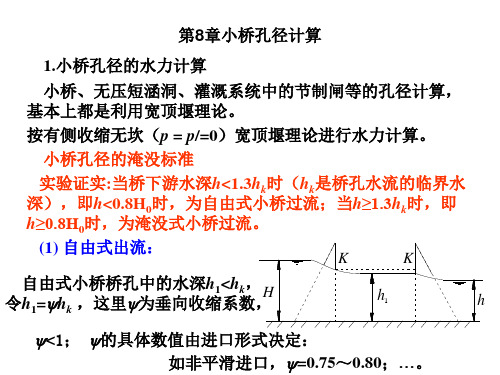
时考虑标准孔径B,使B>b(公路桥梁标准孔径有B=4,5, 6,8,10,13,16,20m等多种;铁路桥梁标准孔径有 B=4,5,6,8,10,12,16,20m)。再校核桥前壅水水深 H。因此,设计中应考虑V/、B、HP三个因素。 Q 2 hk 3 桥下矩形过水断面hk和流量的关系为: 2
g (eb)
∵
Q=AkVk=ebhkVk
• ∴
hk
Vk2
g
(1)
当以允许流速Vmax设计时,自由式小桥桥孔中的水深为h1=yhk , 其过水断面与临界水深过水断面比较,有 Q=ebhkVk=ebh1Vmax=ebyhk Vmax 即 Vk =yVmax
hk
Vk2
g
1.5 0
y 2V 2
K K
自由式小桥桥孔中的水深h1<hk, H 令h1=yhk ,这里y为垂向收缩系数,
h1
h
y<1; y的具体数值由进口形式决定: 如非平滑进口,y=0.75~0.80;…。
• 自由出流时:
V 2 g ( H 0 yhk )
小桥孔径一般为矩形断面,水流发生侧向收缩处bc=eb,相应地
Q ebyhk 2 g ( H 0 yhk )
∴mh Bk hk Bk hk 0
2 k
8.渐进法(1)

SAB=4i
1
SAB=3i
1
SAB=i
1
SAB=0
SAB :与杆的线刚度 i(材料的 、横截面的 、杆长)及 远端支承有关, (材料的E、横截面的I、杆长) 远端支承有关,
而与近端支承无关。 而与近端支承无关。
⑵ 分配系数 设A点有力矩 M,求MAB、MAC 和MAD 点有力矩 , M θA A B 如用位移法求解: 如用位移法求解:
2、基本运算 (单结点的力矩分配) 、 单结点的力矩分配)
F B A MAB F A MABF MBAP MBA MB MBCP MBC C q 固端弯矩带本身符号 MB
F M BA F M BC
=
q C
F F M B = M B A + M BC
B -MB
+
′ MBA
-MB
′ MBC
A
M′ AB
§8-1 力矩分配法的基本概念
理论基础:位移法; 理论基础:位移法;
力矩分配法
计算对象:杆端弯矩; 计算对象:杆端弯矩; 计算方法:逐渐逼近的方法; 计算方法:逐渐逼近的方法; 适用范围:连续梁和无侧移刚架。 适用范围:连续梁和无侧移刚架。
1、名词解释 、
转动刚度S ⑴ 转动刚度 : 表示杆端对转动的抵抗能力。 表示杆端对转动的抵抗能力。 仅使杆端发生单位转动时需在杆端施加的力矩。 在数值上 = 仅使杆端发生单位转动时需在杆端施加的力矩。
总等于附加刚臂上的约束力矩 不能同时放松相邻结点(因定不出其转动刚度和传递系数), ),但可 5)不能同时放松相邻结点(因定不出其转动刚度和传递系数),但可 以同时放松所有不相邻的结点,以加快收敛速度。 以同时放松所有不相邻的结点,以加快收敛速度。
算法设计基础知识点

算法设计基础知识点算法设计是计算机科学领域中的核心概念之一,它是解决问题的一种方法论。
在实际应用中,我们经常需要运用各种算法来解决不同的问题。
本文将介绍一些算法设计的基础知识点,帮助读者了解算法设计的核心思想和常用技巧。
一、时间复杂度和空间复杂度在进行算法设计时,我们需要考虑算法的效率。
时间复杂度和空间复杂度是衡量算法效率的两个重要指标。
时间复杂度描述了程序运行所需要的时间随问题规模的增长而增长的趋势。
常见的时间复杂度有:O(1)、O(log n)、O(n)、O(nlog n)、O(n^2)等,其中O表示一种渐进上界的表示方法。
空间复杂度描述了程序运行所需要的内存空间随问题规模的增长而增长的趋势。
同样地,常见的空间复杂度有:O(1)、O(n)、O(n^2)等。
二、递归与迭代递归和迭代是两种常见的算法设计技巧。
递归是指在解决一个问题的过程中,调用自身来解决相同问题的方法。
它通常包括基本情况和递归情况两个部分。
递归的实现方式简洁但效率较低。
迭代是指使用循环结构来重复执行一段代码的方法。
与递归相比,迭代的实现方式通常更加高效。
在实际算法设计中,我们需要根据问题的性质和需求来选择适合的方法。
三、贪心算法贪心算法是一种常用的求解最优化问题的算法,它通过每一步选择最优解来达到整体最优的目标。
贪心算法的基本思路是在每一步选择中都选择当前状态下的最优解,而不考虑当前选择对以后的影响。
因此,贪心算法的局部最优解不一定是全局最优解。
贪心算法的适用范围较窄,通常只能用来解决一些特定类型的问题。
在使用贪心算法时,我们需要仔细分析问题的性质,判断算法的正确性。
四、动态规划动态规划是一种常用的求解最优化问题的算法,它通过将原问题划分成若干子问题,并保存子问题的解来降低整体问题的复杂度。
动态规划的基本思路是:先解决子问题,然后合并子问题的解来得到原问题的解。
与贪心算法不同,动态规划通常需要使用一个表格来存储子问题的解。
动态规划的优势在于能够避免重复计算,从而提高算法效率。
渐进hash 原理

渐进哈希(Progressive Hashing)的基本原理渐进哈希是一种用于处理大数据集的哈希算法,它将数据分块进行哈希计算,并循序渐进地生成最终哈希值。
在处理大数据集时,渐进哈希算法可以提高哈希计算的效率和速度,并且能够在数据流式处理中实时生成哈希值。
渐进哈希的基本原理包括以下几个步骤:1.分块:将待哈希的数据按照固定大小(通常是512比特)进行分块。
如果数据长度不能被块大小整除,则最后一个块可以是不完整的。
2.初始化:选择一个合适的哈希函数,并初始化哈希算法所需要的参数。
这些参数可以是初始哈希值、轮数、初始密码和密钥等。
3.消息扩展:对每个分块进行消息扩展。
消息扩展是通过将当前分块与上一个分块的哈希值进行异或运算得到的。
4.轮迭代:对消息扩展后的分块进行多轮迭代计算,以生成更复杂的哈希值。
每一轮迭代都会通过哈希函数和密钥来对当前分块进行变换。
5.哈希合并:在每轮迭代之后,将当前分块的哈希值与上一轮迭代的哈希值进行合并。
合并的方式可以是异或、加法、或者其他逻辑运算。
6.生成结果:在处理完所有的分块后,将最后一块的哈希值作为最终的哈希结果。
渐进哈希的主要优势是能够在处理大数据集时减少计算量和内存消耗。
由于数据被分块处理,渐进哈希可以进行流式处理,即数据可以一块一块地产生而不需要全部加载到内存中。
同时,渐进哈希可以在数据流经过的过程中实时生成哈希值,这在实时应用和流式处理中非常有用。
渐进哈希的应用场景渐进哈希算法广泛应用于以下场景:1.大数据处理:在处理大数据集时,传统的哈希算法可能会遇到内存不足和计算量大的问题。
而渐进哈希通过分块处理和流式计算的方式,能够有效降低内存和计算资源的需求。
2.实时应用:渐进哈希算法能够在数据流经过的过程中实时生成哈希值,使得实时应用能够及时获取处理结果。
例如,在网络流量监控中对数据流进行哈希可以用于判断是否有恶意攻击。
3.数据验证:通过对数据的哈希值进行比对,可以验证数据的完整性和一致性。
结构力学学习课件2

F MB
FP
F MBC F MB
A B
M
+
F CB
C
F MC ′
D
A
C MAB
MBA
B µ
MBC
F B
µ
A B
M ′
+
C MCB
C
F F MC + MC ′
D
M
C BC
+ …
µ MCB
C
D
µ MCD
C MDC
例:
用力矩分配法计算图示刚架,作弯矩图。 用力矩分配法计算图示刚架,作弯矩图。 80kN 30kN/m B i=2 3m 3m i=1 10m C i=1 3m 5m 160kN D
D iAD
M
A θA iAB iAB B
MAB =
SAB ⋅M ∑S
A
C
SAC MAC = ⋅M ∑S
A
µ MAj = µAj ⋅ M
MAB=SAB θA =4iAB θA MAC=SAC θA = iAC θA MAD=SAD θA =3iAD θA
( 8-5 ) -
SAD MAD = ⋅M ∑S
CBA = MBA /MAB
µ MAj = µAj ⋅ M
C MBA = CBA ⋅ MAB
远端弯矩/近端弯矩 远端弯矩 近端弯矩
称为分配弯矩。 称为分配弯矩。 称为传递弯矩。 称为传递弯矩。
(8-10) )
二、基本运算(单结点的力矩分配) 基本运算(单结点的力矩分配)
B MBA MAB A MAC θA C
综上所述,多结点力矩分配即为:每次只放松一个结点, 综上所述,多结点力矩分配即为:每次只放松一个结点,相当于单结 点分配传递。最后将各步骤所得的杆端弯矩(增量)叠加。 点分配传递。最后将各步骤所得的杆端弯矩(增量)叠加。
数学物理方法概论之——渐进方法
§ 3 渐近方法
3) 量级小于
若x x0时,f (x) / g(x) 0,则记f (x) o(g(x))
例: x 0, tan(x3) o(x2 ),
x , 对n 0, xn o(ex )
f (x) O(1) 的意义是说 f (x)有界,而f (x) o(1) 义是说f (x)趋于零。
§ 3 渐近方法
获得积分 渐近展式的
一、 逐项积分法: 瓦特森引理:设
方法有两种 (1)F (t) f (ta )tb , a 0,b 1;
(1)把被积函数 (2) f (x)对 | x | 有麦克劳林展式;
的一部分展 (3)t 时, 存在常数M 和C,| F (t) | Mect ;
§ 3.2 渐近展开
§ 3 渐近方法
六、 幂函数的展
式
wn (z) (z z0 )n, n 0,1, 2, , 在D 中,
若当z → z0,对每一个N 有:
N
f (z) an (z z0 )n o[(z z0 )n ]
N
n0
则: an (z z0 )n 是D中,z z0 时,f (z)
的
n0
一个渐近
幂级数展式,f (z记) 为 N an (z z0 )n z z0 n0
其中一种重要的特殊情形是在D中,当z0 时,如
果
f (z)
N n0
an zn
o(zn )
则在D中,当 z 时
f
(z)
~
N n0
an zn
§ 3.3 渐近展式的运算
例: n , Pn (x) O(xn ),
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
l
远端固定
B
远端
S AB
4 EI l
4i
SAB=EI/l A
“固4铰3滑1自0”
EI 1
l
远端滑动
B
S AB
EI l
i
SAB=3EI/l
EI
A
1
l
远端铰支
B
S AB
3 EI l
3i
SAB=0 A
EI
1 l
远端自由
B
S AB 0
第8章 渐进法及其他算法简述
2、分配系数(μij)
杆ij 的转动刚度与汇交于i 结点的所有杆件转动刚度之 和的比值。
0
MB=-20 M’=-MB=20
M
F AB
Pl 8
40 4 8
20kN m
0
最后弯矩 −14.29 31.43 −31.43 0
在分配力矩的数字下面画一横向,表示该结点已 经平衡,力矩总和等于零。
31.43
14.29 A
40
40
C
B
M图(kN.m)
M
F BA
Pl 8
40 4 8
20kN m
二、计算步骤
1、确定各结点处杆端力矩的分配系数、传递系数。 2、计算个杆端的固端弯矩。 3、逐次循环放松各结点,以使结点弯矩平衡,直至结点 上的传递弯矩小到可以略去不计为止(一般需要2~3次循环 即可)。 4、将各杆端的固端弯矩与历次分配弯矩、传递弯矩相加, 即得各杆端的最后弯矩。
§ 8-1 力矩分配法的基本概念 力(弯)矩分配法是基于位移法的逐步逼近精确解 的近似方法,是一种异步迭代法。适用于无结点线位 移(无侧移)的刚架和连续梁。
一、力矩分配法中使用的几个名词
1、转动刚度(Si j)
使等截面直杆某杆端旋转单位角度=1时,在该端所需
施加的力矩。
SAB=4EI/l
EI
A
1
施力端
第8章 渐进法及其他算法简述
3、例题:试用力矩分配法计算图示连续梁,绘弯矩图。
40kN
20kN/m
A
C B
2m 2m
4m
分配系数
4/7 3/7
BA
SBA SBA SBC
4i 4i 3i
43i 4i 3i
3 7
固端弯矩 −20 分配和传递 5.71
20 −40 11.43 8.57
13M
M1 j 1 j M (8-5)
M
14
S141
S14 M S
14 M
1j 12 13 14 15 1
M15 S151
S15 M S
15M
同一结点各杆的分配系数 总和恒等于1。
第8章 渐进法及其他算法简述
2、传递系数(Cij)
杆件远端弯矩与近端弯矩之比称为传递系数。
4iφA EI
MBFC
ql2 8
40kN m,
MCFB 0
第8章 渐进法及其他算法简述
3、例题: 试用力矩分配法计算图示刚架,绘弯矩图。
120kN B i=2 A
20kN/m i=1.5 D
i=2
4m
C
2m 3m
4m
结点
B
A
C
D
杆端
BA
AB AC AD CA DA
分配系数
0.39 0.39 0.22
固端弯矩 -86.4 +57.6 0.0 -40.0 0.0 0.0
144
B
A
40 D
6.86
M图(kN.m) 3.43 C
第8章 渐进法及其他算法简述
§8-1 力矩分配法的基本概念 §8-2 多结点的力矩分配 §8-4 无剪力分配法 §8-10 小结
第8章 渐进法及其他算法简述
§8-2 多结点的力矩分配
一、基本概念
1、力矩分配法是一种渐近法。 2、每次只放松一个结点。 3、一般从不平衡弯矩绝对值较大的结点算起。
M (S12 S13 S14 S15 )1
M12
得:
1
M S12 S13 S14 S15
M (b) S
M M13
1
M15
M14
(3)将(b)代入(a) , 得:
M12 S121
S12 M S
12M
分配系数
ij
Sij S
(i)
M13 S131
S13 M S
0.39
AB
S AB
S AD S AC
S AD
3 1.5 4 2 4 2 3 1.5
0.22
M
f BA
pab2 l2
120 2 32
52
86.4kn.m
M
f dB
pa2b l2
120 22 3
52
57.6kn.m
M
f AD
ql 2
8
20 42 8
40kn.m
89.83
50.74 43.88
第8章 渐进法及其他算法简述
第8章 渐进法及其他算法简述
§8-1 力矩分配法的基本概念 §8-2 多结点的力矩分配 §8-4 无剪力分配法 §8-10 小结
第8章 渐进法及其他算法简述
§8-1 力矩分配法的基本概念 §8-2 多结点的力矩分配 §8-4 无剪力分配法 §8-10 小结
第8章 渐进法及其他算法简述
A φA
l 3iφA
EI
A φA
l
iφA EI
A φA
l
C ij
M ji M ij
2iφA
B
CAB=2iA/ 4iA=1/2
0
CAB=0/ 3iA=0
B
-iφA
CAB=-iA/ iA=-1
B “固1/2铰0滑-1”
第8章 渐进法及其他算法简述
二、基本运算(单结点的力矩分配)
1、解题思路
P1
(a) A MAB
MBA B MBC
P2 C
MCB
(b) A MFAB
MB P1
P2 C
MFBA B MFBC MFCB
MFBA
MB MFBC
MB
M
F BA
M
F BC
(c) A McAB
M' M M B
C MuBA B MuBC McCB
比如: M
BA
M
F BA
M
u BA
第8章 渐进法及其他算法简述
2、解题步骤
ij
Sij S
(i)
(1)杆端弯矩:
3
1 M
1
4
2
1 1 1
5
M12 4i121 S121
M13 M14
3i131 S131 i141 S141
(a)
M15 4i151 S151
第8章 渐进法及其他算法简述
(2)由结点1的平衡条件:
M1 0 即: M M12 M13 M14 M15 0
分配传递 -3.43 -6.86 -6.86 -3.83 -3.43 0.0
最后弯矩 -89.83 +50.7 -6.86 -43.88 -3.43 0.0
AB
S AB
S AB S AC
S AD
42 4 2 4 2 3 1.5
0.39
AC
S AB
S AC S AC
S AD
42 4 2 4 2 3 1.5
(1)在刚结点上加上刚臂(想象),使原结构 成为单跨超静定梁的组合体,计算分配系数。
(2)计算各杆的固端弯矩,进而求出结点的不 平衡弯矩。
(3)将不平衡弯矩(固端弯矩之和)反号后, 按分配系数、传递系数进行分配、传递。
(4)将各杆的固端弯矩、分配弯矩、传递弯矩 相加,即得各杆的最后弯矩。
注:单结点的力矩分配——只需要一次分配和传递即可。