接收机有关参数的物理意义
★CDMA接收机性能指标Eb/No及其他一些参数的认识和比较

CDMA接收机性能指标Eb/No及其他一些参数的认识和比较金亮(上海邮电设计院3G分院上海200092)l 引言接收机的设备性能取值是链路预算中的一个重要参数,其指标的差异直接影响无线网络的性能。
在网络规划中,接收机性能主要通过接收机灵敏度来衡量,接收机灵敏度是指在确保一定质量要求的情况下,接收机输入端所需的最小信号强度。
针对移动通信系统,接收机灵敏度可以由下式决定:接收机灵敏度(dBm)=KBT(dBm)+NF(dB)+S_req (1)其中:KBT为带宽内接收机底部噪声功率。
K是波尔兹曼常数,T为绝对温度值,B为接收信号带宽;NF(Noise Figure)为噪声系数。
他定义为接收机输入信噪比和输出信噪比之比;Sreq为接收机的解调门限。
从式中可以看出,一定质量要求下的接收机解调性能和接收机的噪声系数是接收机性能的两个重要指标。
在(3SM系统中,接收机的解调性能表现为对信噪比(SNR)的要求。
SNR反映出有用信号的抗干扰能力,当信噪比满足一定条件的情况下,接收机就能解调出有用信号。
而对于普遍采用CDMA的3G系统来说,有用信号往往是"淹没"在噪声中传播的,这时信噪比就不能充分地反映出信号的质量,其解调门限由信号的每比特能量与噪声功率谱之比(Eb/No)以及CDMA信号的处理增益决定。
2 Kb/No解析解调门限Eb/No是每比特能量和噪声功率谱密度之比,通过图1可以更好地解释Eb/No的具体含义。
图中Ec为码片能量,Rc为码片速率,Eb为数据比特能量,Rb为数据比特速率,No为除去有用信号后的其他干扰信号谱密度。
在接收机处接收到的信号E被淹没在噪声信号No中,接收机通过解调等过程得到信息比特,有用信号的数据比特能量是由码片能量Ec累加还原得到,如果数据比特速率(或数据带宽)为Rb,码片速率为Rc(等于工作带宽W),一个数据比特包含的码片数则为Rc/Rb,那么解调后每一个数据比特的能量为Eb=Ec×Rc/Rb,如果数据信号功率用S表示,则S=Eb×Rb=Ec×Gp×Rb=Ec×Rc,因此Eb可以视为信号功率谱密度。
光接收参数
Rn 接收光波长范围:
— 最大接收波长 — 最小接收波长
nm
> 1565
nm
< 1310
光信噪比 OSNR
dB
>22(20)**
反射系数
dB
-27
注 1*: 待研究
注 2*: 8×22 dB 的光信噪比:22 dB;5×30 dB 与 3×33 dB 的光信噪比:
20 dB。
表 3.5.7 列出了以 10Gb/s 为基群、复用通道为 32 的 WDM 系统中 Sn 与 Rn 接
学表达式来表述,但知道了接收端的光信噪比 OSNR,通过一系列的繁琐计算就可以求 出 WDM 系统每个光通道的平均误码率 BER(详见本书附录 3)。
因此 OSNR 是 WDM 系统的一个非常重要技术指标。 对 OSNR 的具体要求与 WDM 系统的具体配置有关,如每个复用通道的基群速 率、收发之间的光再生段数目等。一般来讲,对于以 2.5Gb/s 为基群的 WDM 系统,每 个复用通道接收端 Rn 点的光信噪比 OSNR 应该优于 20(或 22) dB。对于以 10Gb/s 为基群的 WDM 系统,每个复用通道接收端 Rn 点的光信噪比 OSNR 应该优于 26(或 25) dB。具体可见表 3.5.6 与表 3.5.7。 此外,理论计算与实验表明,对于以 2.5Gb/s 为基群的 WDM 系统, [url=/]魔兽 sf[/url]只要光接收机的接收端 Rn 点的光信噪比达 到 OSNR > 15dB;对于以 10Gb/s 为基群的 WDM 系统,只要光信噪比达到 OSNR > 20dB,就能保证系统的误码率 BER 优于 1×10-15。之所以对以 2.5Gb/s 为基群的 WDM 系统提出 OSNR > 20(22)dB,对以 10Gb/s 为基群的 WDM 系统提出 OSNR > 25(26) dB 的指标,是考虑了 5 ~7 dB 的富余度。 表 3.5.6 列出了以 2.5Gb/s 为基群、复用通道为 32 的 WDM 系统中 Sn 与 Rn 接口参数规范以供参考,除光信噪比 OSNR 为初始值之外,其他皆为寿命终了值。
民用航空气象地面观测规范第14章 多普勒天气雷达知识
第十四章多普勒天气雷达知识第一节引言RADAR(Radio Detection and Ranging)是一个利用电磁波进行探测、定位的仪器。
最早用于军事目的,后来在气象部门也逐渐得到使用。
它具有准确、客观和实时的特点。
近年来,多普勒雷达的技术也逐渐成熟,它除了保持常规天气雷达的特点外,还通过计算频率(相位)的变化,提取风场的一些特征,因而更具有使用价值。
我国新一代天气雷达建设是我国20世纪末、21世纪初的一项跨世纪气象现代化工程。
我国新一代天气雷达组网的目标和原则是:在我国东部沿海和多强降水地区和四川盆地的大部分地区,布设S波段(波长10cm)新一代天气雷达;在我国强对流天气发生和活动比较频繁、经济比较发达的中部地区,布设C波段(波长5cm)新一代天气雷达;其它地区,即我国第一地形阶梯地域的青、新、藏等流域暂不布设全国组网的站点;但省(区)会所在地和重要地区根据气象服务工作的需要和可能,按统一业务布点要求设置新一代C波段天气雷达,作为局地监测和服务使用。
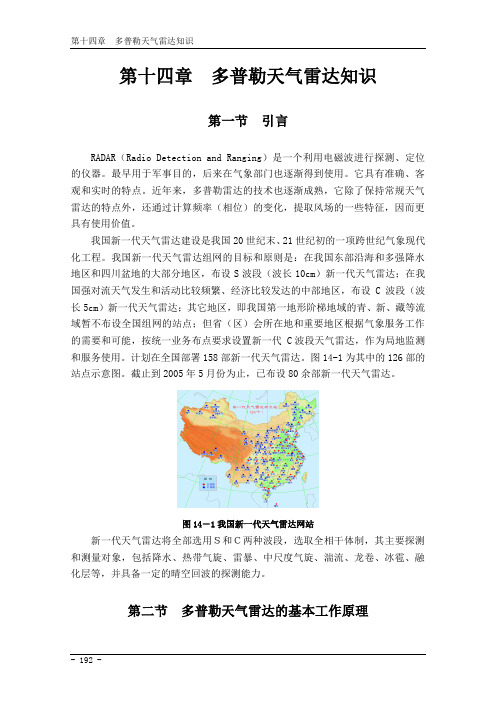
计划在全国部署158部新一代天气雷达。
图14-1为其中的126部的站点示意图。
截止到2005年5月份为止,已布设80余部新一代天气雷达。
图14-1我国新一代天气雷达网站新一代天气雷达将全部选用S和C两种波段,选取全相干体制,其主要探测和测量对象,包括降水、热带气旋、雷暴、中尺度气旋、湍流、龙卷、冰雹、融化层等,并具备一定的晴空回波的探测能力。
第二节多普勒天气雷达的基本工作原理粒子对电磁波作用的两种基本形式是散射和吸收。
气象目标对雷达电磁波的散射作用是雷达探测大气的基础。
当天气雷达间歇性地向空中发射电磁波(称为脉冲式电磁波)时,它以近于直线的路径和接近光波的速度在大气中传播,在传播的路径上,若遇到空气分子、大气气溶胶、云滴和雨滴等悬浮粒子时,入射电磁波会从这些粒子上向四面八方传播开来,这种现象称为散射。
粒子产生散射的原因是:粒子在入射电磁波的作用下被极化,感应出复杂的电荷分布和电流分布,它们也要以同样的频率发生变化,这种高频率变化的电荷分布和电流分布向外辐射的电磁波,就是散射波。
系列I_面试题_射频_微波工程_电磁场相关
1 1 请简述锁相环的基本构成与工作原理请简述锁相环的基本构成与工作原理请简述锁相环的基本构成与工作原理,,各主要部件的作用各主要部件的作用。
答:相环由以下三个基本部件组成:鉴相器(PD)、环路滤波器(LPF)和压控振荡器(VCO)。
锁相环的工作原理: 1. 压控振荡器的输出经过采集并分频; 2. 和基准信号同时输入鉴相器; 3. 鉴相器通过比较上述两个信号的频率差,然后输出一个直流脉冲电压; 4. 控制VCO,使它的频率改变; 5. 这样经过一个很短的时间,VCO 的输出就会稳定于某一期望值。
锁相环可用来实现输出和输入两个信号之间的相位同步。
当没有基准(参考)输入信号时,环路滤波器的输出为零(或为某一固定值)。
这时,压控振荡器按其固有频率fv 进行自由振荡。
当有频率为fr 的参考信号输入时,Ur 和Uv 同时加到鉴相器进行鉴相。
如果fr 和fv 相差不大,鉴相器对Ur 和Uv 进行鉴相的结果,输出一个与Ur 和Uv 的相位差成正比的误差电压Ud,再经过环路滤波器滤去Ud 中的高频成分,输出一个控制电压Uc,Uc 将使压控振荡器的频率fv(和相位)发生变化,朝着参考输入信号的频率靠拢,最后使fv= fr,环路锁定。
环路一旦进入锁定状态后,压控振荡器的输出信号与环路的输入信号(参考信号)之间只有一个固定的稳态相位差,而没有频差存在。
这时我们就称环路已被锁定。
⑴鉴相环(或相位比较器,记为PD 或PC):是完成相位比较的单元,用来比较输入信号和基准信号的之间的相位。
它的输出电压正比于两个输入信号之相位差。
⑵低通滤波器(LPF):是个线性电路,其作用是滤除鉴相器输出电压中的高频分量,起平滑滤波的作用。
通常由电阻、电容或电感等组成,有时也包含运算放大器。
⑶压控振荡器(VCO):振荡频率受控制电压控制的振荡器,而振荡频率与控制电压之间成线性关系。
在PLL(锁相环)中,压控振荡器实际上是把控制电压转换为相位。
通信电路复习题
● 画出超外差式调幅接收机组成框图及各组成部分输出电压波形。
● 模拟调制的种类,为何在发射机中要对基带信号进行调制(调制的原因)。
1.调制可以减小天线尺寸;2.调制可以实现信道的频率复用。
● 通信方式:双工、单工、半双工,各举一例实际应用。
● 混频将已调信号的载频变成另一个固定的载频(中频), 而不改变信号的调制规律。
● 画图示意无线电波的传播方式:地波、空间波、天波● 线性与非线性电路线性电路 —全部由线性或处于线性工作状态的元器件组成的电路非线性电路 —有一个或一个以上处于非线性工作状态的元器件组成的电路 ● 选频电路的频带宽度、矩形系数的定义。
● 非线性电路的基本特点:1. 产生了新的频率分量, 可变换频率(混频器);2. 叠加定理不再适用。
● 单调谐回路谐振放大器中的放大器件静态工作点设置在什么区域,以保证晶体管工作在甲类工作状态(放大区);丙类功率放大电路中的放大器件静态工作点设置在什么区域?(截止区) ● 常用的集中选频滤波器有:石英晶体滤波器、陶瓷滤波器、声表面波滤波器。
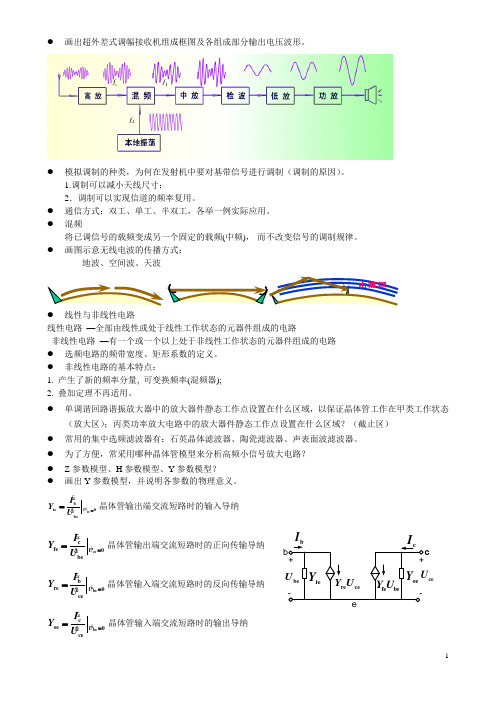
● 为了方便,常采用哪种晶体管模型来分析高频小信号放大电路? ● Z 参数模型、H 参数模型、Y 参数模型?● 画出Y 参数模型,并说明各参数的物理意义。
ce b ie 0beU I Y U ==晶体管输出端交流短路时的输入导纳ce c fe 0beU I Y U ==晶体管输出端交流短路时的正向传输导纳be bre 0ce U I Y U ==晶体管输入端交流短路时的反向传输导纳be coe 0ceU I Y U ==晶体管输入端交流短路时的输出导纳c f Lf If bI cI Y U fe beY U ceU U● 下列哪些电路属于线性电路?● 高频小信号放大电路、高频功率放大电路、中频放大电路 ● 振荡电路、倍频器、调制电路、解调电路、混频器 ● Q 、 f 0、通频带、选择性的关系。
● Q 越高,f 0 越低,则通频带越窄;Q 越高, 通频带越窄,选择性越好。
《高频电子线路》复习题及答案
《高频电子线路》复习题及答案模块一:认知一、填空题1.无线电波的主要传播方式是地面波、天波和空间波。
2.空间波是电磁波由发射天线直接辐射至接收天线。
由于地面及建筑物等的反射亦能抵达接收天线,故空间波实际上是直射波和反射波的合成,此现象称为(多径)传播。
3.一个点对点通信系统由信息源、发射设备、信道、接收设备、信息归宿组成。
4.能将天线或传输线路送来的信号加以选择、放大、变换,以获得所需信息的设备叫做接收设备。
5.能产生高频振荡,并经调制、放大后,将输出的高频功率馈送给传输线路或天线的设备,叫做发射设备。
6.天波是利用电离层的反射而进行传播的。
7.目前,应用较多的几种集中选频滤波器有:陶瓷滤波器、晶体滤波器,声表面波滤波器。
8.高频小信号谐振放大器的主要特点是以谐振回路作为放大器的交流负载,它的主要作用是 选频滤波功能。
9.放大器的噪声系数N F 是指输入端的 信噪比与输出端的信噪比 两者的比值。
10.通信网络和系统的主要任务是传输信息。
11.通信系统的信道分为有线信道和无线信道。
12.通信系统的分类方式主要有,,,和。
13.按通信方式来分类,通信系统可分为单工,半双工和全双工。
14.无线电波只是一种波长较长,频率较低的电磁波。
波长与频率之间存在以下关系:v=λf 。
(v 为光速,λ为波长和f 为频率)。
15.并联谐振回路激励源是电流,响应是(电压)。
16.天波是利用(电离层)的反射而进行传播的。
17.地面波沿地球表面传播,虽然地球的表面是弯曲的,但电磁波具有绕射的特点,其传播距离与大地损耗有密切关系,工作频率愈高,衰减就愈大。
18.理想并联LC 谐振电路的固有谐振频率为0ω,若外加信号角频率0ωω=,则并联LC 谐振电路的阻抗等效为纯电阻,电阻值等于(无穷大)。
19.频率为3~30MHz 的频段称为高频段,它对应的波长是10-100m ,又称为短波波段。
20.并联LC 谐振电路的固有谐振频率为0ω,若外加信号角频率0ωω>,则并联LC 谐振电路呈现容性失谐。
浅析如何正确理解和对比接收机的动态范围

Manufacturers浅析如何正确理解和对比接收机的动态范围文I 德国纳尔达安全测试方案有限公司Holger Schwarz摘要:本文主要讨论并解释了接收机动态范围的概念、影响动态范圉的因素、调整相关参数对动态范圉的影响、 国际电信联盟(ITU )已发布的评估动态范围建议以及如何科学、正确地对比动态范围参数。
关键词:灵敏度截点无互调动态范围虚假信号二阶互调0前言随着社会的发展和技术的不断进步,电磁环境越来越复杂,无线电监测和管理工作难度加大。
这不仅对接收机 的灵敏度提出了要求,也对动态范围提出了更高的要求。
动态范围是衡量接收机性能的一个关键指标,涉及接 收机的多个参数。
大动态范围的接收机,不仅对虚假信号 (伪像)具有免疫能力(因接收大信号,导致接收机系统进入非线性状态,继而产生虚假响应),还能保持较高的 灵敏度用以发现弱信号。
虚假信号通常是远离接收机调谐图1在辐射水平较高的天线旁检测微弱未知信号频率的大信号,因信号之间的非线性作用而产生。
然而,不同厂商在给出接收机动态范围参数时基于不 同的条件,如低噪声或低失真模式,因此无法简单地按照 技术资料进行对比。
本文的目的是让读者对接收机动态范围有一定的认识,同时了解如何正确地对比不同接收机的 动态范围参数。
在城市环境查找信号干扰时(见图1),测试工程师 经常面临这样一个问题,即干扰信号比较弱,信号电平通 常低于测量仪器的本底噪声。
在这种情况下,测试工程师通常会选择更灵敏的参数设置来查看这些信号,如调整输 入衰减、分辨率带宽(RBW )和参考电平,或者打开前置放大器。
这时,仪器的本底噪声会降低,从而能够查看电平很弱的干扰信号。
但这样不可避免地会降低测量仪器对邻近大信号的免疫能力,还可能由于其他大信号的过调 制,产生诸如谐波、互调和干扰线之类的虚假信号。
1动态范围定义简而言之,接收机的动态范围是指可用的输入信号范围,它描述了在这些虚假信号出现之前,一个或多个信号 与测量仪器的本底噪声之间的电平差。
GNSS测量接收机主要技术参数
GNSS测量接收机主要技术参数GNSS(全球导航卫星系统)测量接收机是用于接收来自卫星系统的导航信号,并通过对这些信号进行处理,计算出测量位置的设备。
这些接收机具有许多技术参数,以确保测量结果的准确性和可靠性。
下面是GNSS 测量接收机的主要技术参数。
1.接收灵敏度:接收灵敏度是指接收机对信号的灵敏程度。
高接收灵敏度能够接收到较弱的信号,从而提高接收机的工作范围和适用性。
2.信号跟踪能力:接收机应具有较强的信号跟踪能力,能够同时跟踪多个卫星的信号,并保持对信号的稳定跟踪,以提高测量结果的精度。
3.精度:接收机的精度是指接收机计算测量位置的准确性。
通常精度以水平、垂直和时间精度来表示,单位为米或纳秒。
4.多路径抑制:多路径是指卫星信号在传播过程中受到地面、建筑物等障碍物的反射和散射,导致接收机收到多个信号源的信号。
接收机需要具备多路径抑制功能,以减少多路径对测量结果的影响。
5.更新率:接收机的更新率是指接收机每秒钟计算测量位置的次数。
较高的更新率能够提供更实时的位置信息,对于动态应用如车辆导航和无人机监控等应用场景非常重要。
6.动态范围:动态范围是指接收机能够接收和处理的信号强度范围。
较宽的动态范围能够使接收机在复杂的信号环境下工作,提高测量结果的可靠性。
7.工作频率:GNSS系统包括多个频段的信号,不同的GNSS系统在不同的频段上工作。
接收机需要能够接收并处理所选定GNSS系统的信号,并在不同的频段选择合适的接收频率。
8.电源消耗:接收机的电源消耗是指接收机在工作过程中所消耗的电能。
较低的电源消耗能够延长接收机的工作时间,提高使用的便携性。
9.接收机类型:GNSS测量接收机根据其设计和应用环境可分为静态接收机和动态接收机。
静态接收机多应用于测量、科研等领域,而动态接收机多应用于车辆导航、无人机等动态应用场景。
10.数据通信接口:接收机需要具备数据通信接口,以便将测量结果传输给数据处理系统或其他设备。
光接收机
滤波器
滤波器
作用:对已发生畸变和有严重码间干扰的信号进 行均衡,使其尽可能地恢复原来的状况,以利于 定时判决。
我们最不能消除码间干扰,但我们能做到不管输入波 形如何变化,只要经过均衡滤波器后,采用时间点上干扰 为零,就可以消除码间干扰。
H out(
f
)
1 [1 2
cos (f
B)]
H p ( f ) Bsin(f B) f
滤波器传输函数为:
HT ( f ) H out( f ) H p ( f ) (f
2B)(1 cosf )
B
sin f
B
时钟恢复和判决电路
任务:把线性通道输出的余弦波形恢复成数字信号
确定是“1”或是“0”, 需要对某时刻的码元
作出判决。若判决结 果为“1”,则由再生 电路产生一个矩形“1” 脉冲;若判决结果为 “0”,则由再生电路 重新输入一个“0”。
erfc
I1
1
ID 2
erfc
ID
0
I0 2
2、Q参数
BER主要取决于判决阀值ID,
为使BER最小,应对ID进行优化,
在实际中,当ID满足下式关系时,
BER最小。
Q I1 ID ID I0 I1 I0
1
0
1 0
判 输出 决 器
时钟恢复
为了精确地确定“判决 时刻”,需要从信号码 流中提取准确的时钟信 息作为标定,以保证与 发送端一致。
判决再生
若信号电平超过判决门限电平,则判为“1”码; 低于判决门限电平,则被判为“0”码。
光接收机噪声分析
1.散粒噪声 散粒噪声是电子数目的随机涨落引起电流的随机
卫星通信地球站收发射频设备技术性能指标浅释(三)--地球站接收设备性能指标浅释(论文)

(5)出功率(1d B压缩点)
(3)
图2 接收系统噪声温度的组成
接 收 系统的(G / T)值 用分贝表 示时,按式(4) 计算
[G/T ]=[GR]-[LF]-10logFS
(4)
式中,[G R](d B)为接收天 线 增益,其余已在图 1中注明。
[例]工作于C频段的地球站,已知用于接收时天线 增益[G R]=38. 2d B,[L F] = 0. 25d B,T A=4 0K,T R=35 K
τ (ω) = − dθ (ω) dω
(6)
图4 一种滤波器的相位-频率特性和群时延
还要指出,对于ω本身所产生的相位滞后为θ, 相应的相位时延是
Tp
=
− θ (ω) ω
(7)
从物理意义来看,群时延实际上是信号包络的时
延,为便于理解,我们用调幅信号作为例子来说明。
f (t) = E(t) cosωct = (1 + m cosωmt) cosωct 式中, E(t) = (1 + m cosωmt) 为包络函数;ωc
为载波角频率;ωm为调制角频率;m 为调制指数, 0≤m≤1。
f (t) 还= 可E(进t) c一os步ω表ct 为= (1 + m cosωmt) cosωct
f
(t)
=
cos ω c t
+
m 2
cos(ωc
−
ωm
)t
对讲机基础知识(参数介绍)
对讲机基础知识(参数介绍)一、对讲机的基本功能对讲机的基本功能就是完成语音的无线传输,接收方能清晰的接收到发送方的语音信号。
对讲机的功率越大,发出的电磁波越强,无线通信距离越远。
无线电波在传输过程中会逐渐衰减。
手持对讲机,受电池能量的限制,以及对使用者健康保护的目的,功率不可以做的很高,目前国际(国家)标准规定:手持对讲机最大功率不能大于5W ( 即5瓦) .接收机的灵敏度越高,通信距离越远。
但是由于背景电磁噪声的存在,接收机的放大倍数不可以无限提高,接收机的灵敏度也就不能无限提高。
于是在当前技术背景下,对讲机的灵敏度一般为:-118 dBm ~ -123dBm ( 0.15μV ~ 0.28μV)处于各种技术需求考虑:对讲机还有其他一些技术参数,下面分发射和接收两方面予以介绍。
二、对讲机发射机技术参数:发射机信号流程框图1.频率误差(载频容差)2.发射功率3.发射调制灵敏度4.发射调制限制5.调制失真: (音频失真)6.调制特性7.发射信噪比S/N8.剩余调频9.发射机电流10.邻道功率11.杂散射频分量三、对讲机发射机技术参数解释:1、频率误差(载频容差):为未调制载波频率与额定(标称)频率之差。
频率误差用ppm或Hz 为单位来表示。
一般要求:小于10ppm.频率误差可用仪器直接测试。
2.发射功率:在未加调制情况下,一个射频周期内发射机加给传输线的平均功率(W 或dBm)。
通俗的讲,就是从发射机天线座输出的RF功率。
要求小于5W.发射功率可由仪器直接测试。
3、发射调制灵敏度:发射机的标准输入信号电压,用mV或dBm为单位表示。
使发射机调制频偏达到标准频偏(最大频偏的60%)时的调制信号电平,就叫发射机的调制灵敏度。
一般在5mV ~20mV, 没有硬性规定。
测试方法如下:4、发射调制限制(极限调制度):发射机音频电路防止调制频偏超过最大允许偏移的能力。
(单位:HZ或者KHz)。
宽带5KHZ; 中带4KHZ; 窄带2.5KHZ.测试条件:调制频率1KHZ 、调制信号幅度120mV,滤波器设置50HZ~15KHZ5、调制失真: (音频失真):由于调制电路的非线性(虽然设计者总是尽可能使之靠近线性),而造成的调制音频信号失真,叫调制失真。
射频信号参数

射频信号参数
- 接收灵敏度:是指接收机能够在不超过一定误码率的情况下识别的最低信号强度。
- 信噪比:是指在不超过一定误码率的情况下,解调器能够解调的信噪比门限。
- 发射功率:发射机的信号需要经过空间的衰落之后才能到达接收机,发射功率越高,通信距离越远。
- S参数:也叫散射参数,是表示通过各种不同路径的信号分量之间的一种功率比的参数。
在物理意义上,S参数可以用来描述工作在类似于RF和微波频率的高频下的n端口网络。
- 驻波比和回波损耗:驻波比为1表示到达终端的所有射频能量将被吸收,回波损耗是测量射频终端与系统阻抗之间不匹配的指标。
- 工作温度范围:在极端温度条件下的高功率工作时,终端会产生较高的温度,可能导致终端击穿,因此需要考虑工作温度范围。
这些参数对于评估和优化射频系统的性能至关重要。
在设计和测试射频系统时,需要仔细考虑这些参数,并确保系统在各种条件下的可靠运行。
rtk基础知识

RTK基础知识RTK作为现代化测量中的测绘仪器,已经非常普及.RTK在测量中的优越性也是不言而喻.为了能让RTK的优越性能在使用中充分的发挥出来,为了能让RTK使用人员能灵活的应用RTK,我认为RTK使用人员必须了解以下的基本知识:1. GPS的概念及组成GPS(Global Positio ning System)即全球定位系统,是由美国建立的一个卫星导航定位系统,利用该系统,用户可以在全球范围内实现全天候、连续、实时的三维导航定位和测速;另外,利用该系统,用户还能够进行高精度的时间传递和高精度的精密定位。
GPS计划始于1973年,已于1994年进入完全运行状态(FOC[2]) 。
GPS的整个系统由空间部分、地面控制部分和用户部分所组成:空间部分GPS的空间部分是由24颗GPS工作卫星所组成,这些GPS工作卫星共同组成了GPS卫星星座,其中21颗为可用于导航的卫星,3颗为活动的备用卫星。
这24颗卫星分布在6个倾角为55°的轨道上绕地球运行。
卫星的运行周期约为12恒星时。
每颗GP S工作卫星都发出用于导航定位的信号。
GPS用户正是利用这些信号来进行工作的。
控制部分GPS的控制部分由分布在全球的由若干个跟踪站所组成的监控系统所构成,根据其作用的不同,这些跟踪站又被分为主控站、监控站和注入站。
主控站有一个,位于美国克罗拉多(Colorado)的法尔孔(Falcon)空军基地,它的作用是根据各监控站对GPS的观测数据,计算出卫星的星历和卫星钟的改正参数等,并将这些数据通过注入站注入到卫星中去;同时,它还对卫星进行控制,向卫星发布指令,当工作卫星出现故障时,调度备用卫星,替代失效的工作卫星工作;另外,主控站也具有监控站的功能。
监控站有五个,除了主控站外,其它四个分别位于夏威夷(Hawaii)、阿松森群岛(Ascencion)、迭哥伽西亚(Die go Garcia)、卡瓦加兰(Kwajalein),监控站的作用是接收卫星信号,监测卫星的工作状态;注入站有三个,它们分别位于阿松森群岛(Ascencion)、迭哥伽西亚(Diego Garcia)、卡瓦加兰(Kwajalein),注入站的作用是将主控站计算出的卫星星历和卫星钟的改正数等注入到卫星中去.用户部分GPS的用户部分由GPS接收机、数据处理软件及相应的用户设备如计算机气象仪器等所组成。
新一代天气雷达-多普勒天气雷达原理-张深寿

距离订正项
47
例子 (Z-D)
Unit Volume
D = 1 mm, samples = 729 Z = 729 mm6m-3 = 29dBZ R = 5.588 mm/hr
D= 3 mm, samples = 1 Z = 729 mm6m-3 = 29dBZ R = 0.254 mm/hr
最大不模糊距离
51
52
53
54
Rmax 实际回波
显示 (视在回波)
56
多普勒效应
一个例子是:当一辆紧急的火车(汽车)鸣着喇叭 以相当高的速度向着你驶来时,声音的音调(频率) 由于波的压缩(较短波长)而增加。当火车(汽车) 远离你而去时,这声音的音调(频率)由于波的膨 胀(较长波长)而减低。
58
径向速度的获取
反射率
• • • •
4个0.25km距离库的平均功率;(1KM分辨率) 平均 P r2 Z r 根据气象雷达方程计算Z c 利用dBZ公式,把Z转换为dBZ。
平均径向速度
• 40~50个脉冲对平均 • 0.25km分辨率
谱宽
• 一个距离库内速度离散度的度量,用于速 度质量估计
影响速度谱宽的气象因子
天线方向图及波束宽度
• 天线的水平和垂直面上的辐射能流密度的 相对分布曲线图,叫天线方向图
– 影响雷达旁瓣假回波
• 两个半功率点的夹角,叫波束宽度
– 决定雷达径向探测精度
• SA波束宽度0.99°
天线增益
• 定向天线在最大辐射方向的能流密度和各 向均匀辐射的天线能流密度之比。 G=Smax/Sav
•
• 速度模糊:表现为从正、负速度的最大值 突变 为负、 正速度的最大值。
《北斗导航原理与系统》6-GNSS接收机
GPS卫星波束
33
发射天线增益
Z
r
卫星 PSV
r
地心
Y
X 34
接收机天线有效面积
对各向同性天线, GR 1
对L1信号,λ=0.19m,有 Aeff 2.872 103 m2 或 Aeff 25.4dB
35
接收信号功率
发射功率 PT 27W 14.3dBW
卫星
发射天线增益GT 14.7dB
接收机的前端
位于天线与基带信号处理之间; 接收到的卫星信号功率放大100dB以上; 将信号下变频到容易处理的频段; 将模拟信号转换为数字信号; 尽量保持信号的形状,减小信号失真。
26
GPS接收机前端举例(L1)
27
7. GNSS接收机的信号强度
GNSS卫星高度超过20,000km,接收机天线收到的信 号很弱,信号功率只有-130dBm左右,接收机输入功 率信噪比为-20dB,即信号淹没在噪声中;
电源特性
电 源:使用二节或三节AA电池 工作时间:使用三节AA电池并联,典型工作状态下可工作12小时以
物理指标
尺 寸:155.5mm×78.8mm×42.7mm(长×宽×厚) 重 量:265克(不含电池)
49
GIS 数据采集GPS指标
环境特性
工作温度:-10℃ ~ +60℃ 存储温度:-20℃ ~ +70℃ 防尘防水:IP67 抗 跌 落:1.5米高度自然跌落至地面
20
接收机的技术指标
测量定位精度:水平位置精度和垂直高度精度。 时间同步精度:GNSS接收机输出的时间同步秒 脉冲信号与系统时同步精度。 位置数据更新率:一般为1次/秒~10次/秒,通常 高动态接收机的更新率要求更高。 首次定位时间:接收机从开始加电到首次得到满 足定位精度要求的定位结果所需的时间。
控制电机(第四版)(陈隆昌、阎治安版)课后答案
第二章1.为什么直流发电机电枢绕组元件的电势是交变电势而电刷电势是直流电势?答:电枢连续旋转,导体ab和cd轮流交替地切割N极和S极下的磁力线,因而ab和cd中的电势及线圈电势是交变的。
由于通过换向器的作用,无论线圈转到什么位置,电刷通过换向片只与处于一定极性下的导体相连接,如电刷A始终与处在N极下的导体相连接,而处在一定极性下的导体电势方向是不变的,因而电刷两端得到的电势极性不变,为直流电势。
2. 如果图 2 - 1 中的电枢反时针方向旋转,试问元件电势的方向和A、 B电刷的极性如何?答:在图示瞬时,N极下导体ab中电势的方向由b指向a,S极下导体cd中电势由d指向c。
电刷A通过换向片与线圈的a端相接触,电刷B与线圈的d端相接触,故此时A电刷为正,B电刷为负。
当电枢转过180°以后,导体cd处于N极下,导体ab处于S极下,这时它们的电势与前一时刻大小相等方向相反,于是线圈电势的方向也变为由a到d,此时d为正,a为负,仍然是A刷为正,B刷为负。
4. 为什么直流测速机的转速不得超过规定的最高转速? 负载电阻不能小于给定值?答:转速越高,负载电阻越小,电枢电流越大,电枢反应的去磁作用越强,磁通被削弱得越多,输出特性偏离直线越远,线性误差越大,为了减少电枢反应对输出特性的影响,直流测速发电机的转速不得超过规定的最高转速,负载电阻不能低于最小负载电阻值,以保证线性误差在限度的范围内。
而且换向周期与转速成反比,电机转速越高,元件的换向周期越短;eL正比于单位时间内换向元件电流的变化量。
基于上述分析,eL必正比转速的平方,即eL∝n2。
同样可以证明ea ∝n2。
因此,换向元件的附加电流及延迟换向去磁磁通与n2成正比,使输出特性呈现非线性。
所以,直流测速发电机的转速上限要受到延迟换向去磁效应的限制。
为了改善线性度,采用限制转速的措施来削弱延迟换向去磁作用,即规定了最高工作转速。
5. 如果电刷通过换向器所连接的导体不在几何中性线上,而在偏离几何中性线α角的直线上,如图 2 - 29 所示,试综合应用所学的知识,分析在此情况下对测速机正、反转的输出特性的影响。
重点-手机天线的基本参数

手机天线的基本参数1,VSWR 驻波比V oltage standing wave ratio. Measures the peak to peak voltage on the input transmission line.一般高频传输线上都是行驻波。
电压驻波比是指传输线线相邻的电压振幅最大值和电压振幅最小值的绝对值的比值。
行波无反射状态,VSWR=1,为最佳情况。
全反射状态,VSWR为无穷大。
对于天线而言,我们希望反射的能量越少越好,那么就用驻波比来表示反射的多少,尽量接近1为最佳。
VSWR=(1+反射系数)/(1-反射系数)。
驻波比越小越好,表示反射系数越小越好。
驻波比反映了天馈系统的匹配情况。
它是以天线作为发射天线时发射出去和反射回来的能量(对于天线而言,重点强调的是能量关系,而不像传输线那样强调的是电压之间的关系)的比来衡量天线性能的。
驻波比是由天馈系统的阻抗决定的。
天线的阻抗与馈线的阻抗与接收机的阻抗一致,驻波比就小。
驻波比高的天馈系统,信号在馈线中的损失很大。
驻波比跟反射系数,也可以说的回波损耗是成正比的,回波损耗强调能量关系。
来自网络,仅供参考2,Return Loss 回波损耗The amount of power reflected by the antenna back to the generator.回波损耗是指某一点(对于手机天线而言是指天线的馈点处)反射波的功率与入射波的功率之比的10*log值。
也就是反射系数的平方的10*log值。
回波损耗=10*log(反射系数平方值)。
知道了驻波比,可以求出反射系数,进而就可以求出回波损耗。
单位是dB,有时候回波损耗也当成是反射系数,即20*log(反射系数),由于反射系数小于1,所以回波损耗为负数。
3,Directivity 方向系数Ratio of the power density in the direction of maximum power to the average power.能够定量的表示天线定向辐射能力的电参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
正弦信号的傅立叶变换是在fs和-fs频率处的 Dirac脉冲。
检波方式
由于民用的电磁兼容产品族标准都是从CISPR标准转化过来 的,这些标准都是为了保证通信和广播的畅通而编制的,因 此骚扰对通信和广播的影响最终是有人的主观听觉效果来判 断,平均值检波和峰值检波都不足以描述脉冲的幅度,宽度 和频度对视觉造成的影响,而必须用准峰值检波,只有准峰 值检波才比较符合人耳对声音的反应规律。
2、时域信号到频域信号变换
当方波的周期趋于无穷大,频谱中的离散谱线 越来越靠近,最终得到单一脉冲对应的连续频 谱。 单个方波的频谱可由Sin(x)/x函数描述。
u (t ) u( f )
t
1/T
T
f
图5.12 单个方波脉冲的频谱
2、时域信号到频域信号变换
如果单一方波脉冲宽度TP趋向于0,Sin(x)/x的 所有零点趋于无穷大。 时域中的无限窄脉冲——Dirac脉冲,其傅立叶 变换得到的频谱是一条直线。
u(t)
u( f )
-T
T
t
1 / T
1/T
f
图5.15 Dirac脉冲序列的傅立叶变换
Dirac脉冲序列是分析信号采样的有用工具。
模拟信号的采样是与Dirac脉冲序列的卷积。
2、时域信号到频域信号变换
正弦信号的频谱 u(t)
U(f)
-1/T
t
1/T
f
T
图5.16 正弦信号的傅立叶变换
H(f )
h (t )e
j 2 ft
dt
1、傅立叶变换公式
傅立叶变换可以得到时域信号的频谱:
正变换 H ( f ) 逆变换 h ( t )
h(t) 时域
h (t )e
j 2 ft
dt
H ( f )e
j 2 ft
df
Re(f)
欢迎提问
Welcome for Question!
接收机有关参数的物理意义
2007-11-1 吕飞燕
目录
接收机原理框图
参数概述 3dB
6dB带宽 傅立叶变换的背景知识 检波:峰值\准峰值,以及与扫描时间的关系 混频\超外差\脉冲重复率的定义
a点
高频衰减器 校准信号发 生器 高频放大器
混频器
本地振荡器
b点
中频放大器 中频衰减器 中频滤波器
峰值加权
包络检波器
准峰值加权 有效值加权 平均值加权 图5. 骚扰测量仪的电路框图
低频放大器
指示电表
接收机的参数
根据CISPR 16(对应中文标准GB/T 6113.1),接收 机上的这些关键参数都是统一的,这些参数包括: 中频带宽,检波器充放电时间常数,电表机械时间 常数和过载系数。 通常EMC标准中的中频带宽都是6dB带宽,只有通 信产品杂散测试需要使用3dB带宽。 对于30-1000MHz,所有EMI接收机的6dB带宽都统 一为120KHz;对于150KHz-30MHz,则统一为 9KHz。
接收机的测量周期
接收机的测量时间直接跟检波器的冲放电时间有关。用准峰值 检波方式进行测试的主要问题是测量时间长。下面是准峰值检 波和峰值检波的测试时间比较。
采用准峰值检波测量50Hz干扰信号的最小扫描时间(测量周期为1s)
频率范围 150kHz~30MHz 30MHz~1000MHz 带宽 9kHz 120kHz 步长 5kHz 步数 5970 最小扫描时间 5970s=1b40min
频谱仪的分辨率带宽/视频带宽/脉冲重复率
把检波方式设置为峰值检波并最大值保持,分辨率带宽设为 1MHz,视频带宽至少为1MHz,推荐为3MHz。此方法在脉 冲没有重叠的情况下测试比较准确,这是在分辨率带宽大于 测试脉冲重复率的情况下得到的。 当分辨率带宽小于脉冲重复率时,就会有脉冲重叠,从而导 致对功率的低估。
通频带 f0.7 = fH – fL fH
通频带的其他叫法: 3dB带宽 半功率频带
傅立叶变换的背景知识
傅立叶变换是积分变换,既可以通过积分电路直接实现,也可以通过信 号取样采集并进行数据处理的方式来实现.
积分电路,其实就是接收机上的检波电路.这可以实现从时域信号到单 频点信号的检测. 信号处理:先通过采样,把连续的时域信号变成离散的时域信号数据,再 通过FFT或者DFT或者优化算法,得到频谱.
u (t )
u( f )
t
f
图5.13 Dirac脉冲的傅立叶变换来自能量沿频率轴均匀分布。
2、时域信号到频域信号变换
相反,频域中零频处的一个Dirac脉冲,其傅立 叶反变换得到的时域信号是直流分量。
u(t)
u( f )
t
f
图5.14 一个直流电压的傅立叶变换
2、时域信号到频域信号变换
周期为T的一序列Dirac脉冲的频谱是一序列周 期为1/T的离散Dirac脉冲谱线
2、时域信号到频域信号变换
为了对FFT 有感性认识,下面给出几个典型的时域信号及相应的频域信号。 方波:
图.方波的傅立叶变换
u( f )
u (t )
t
1/T
T
f
周期性信号,具有离散频谱,频谱的谱线是基频的整数倍。 大多数信号能量在基波内。 如果信号有直流分量,频谱内在零频处就有一条谱线。 Sin(x)/x函数是基波和谐波谱线的包络。
什么是超外差
利用本地产生的振荡波与输入信号混频,将输入信号频率变 换为某个预定的频率的电路。 超外差这种方法是为了适应远程通信对高频率、弱信号接收 的需要,在外差原理的基础上发展而来的。外差方法是将输 入信号频率变换为音频,这种方法是将输入信号变换为超音 频,所以称之为超外差。
超外差电路的典型应用是超外差接收机,其优点是:①容易 得到足够大而且比较稳定的放大量。②具有较高的选择性和 较好的频率特性。③容易调整。 缺点是电路比较复杂,同时也存在着一些特殊的干扰,如像 频干扰、组合频率干扰和中频干扰等。
50kHz 19400 19400s=5b23min
采用峰值检波法正确测量50Hz干扰信号的最小扫描时间(测量周期为20ms)
频率范围
150kHz~30MHz
带宽
9kHz
步长
5kHz
步数
5970
最小扫描时间
119.4s=2min
30MHz~1000MHz
120kHz
50kHz 19400 388s=6min
频域 H(f) Im(f)
FT IFT
f
时间
f 图。傅立叶变换
傅立叶变换的积分从负无穷到正无穷,要求已知信号的全部时域值,而 且是确知信号。 任一正弦信号可以表示成同频的余弦分量和同频的正弦分量之和。 傅立叶变换的结果是复数,实部是余弦分量的幅度,虚部是正弦分量的 幅度,可以得到频谱上任一点的实部和虚部,分辨率无穷高。
混频
无论EMI接收机或是频谱分析仪均采用超外差结构。 在这类配置中,频率转换(从高输入信号转换到较 低的中频(IF),需要将输入信号与来自接收机或分 析仪内部精密本振LO实现混频。
混频电路,实质上是一个乘法电路.混频输出的电流, 其频率成分除了本振fL之外,还有fL±fc.通过中频滤波 器fI=fL-fc,就把fL-fc的成分取了出来。再经过第二次混 频和第二次中频滤波,才把有用信号fc取出来.
几种检波方式的特点
1. 平均值检波:其最大特点是检波器的充放电时间常数 相同,特别适用于对连续波的测量。 2. 峰值检波:充电时间常数很小,即使是很窄的脉冲也 能很快充电到稳定值,当中频信号消失后,由于电路的放电 时间常数很大,检波的输出电压可在很长一段时间内保持在 峰值上。峰值检波的特点首先在军用设备的骚扰发射试验中 被优先采用,因为好多军用装备只要单次脉冲的激励就可以 造成爆炸或数字设备的误动作,而无需像音响设备那样讲究 时间的积累。 3. 准峰值检波:这种检波器的冲放点时间常数介于平均 值于峰值之间,在测量周期内的检波器输出既与脉冲幅度有 关,又与脉冲重复频率有关,其输出与干扰对听觉造成的效 果相一致。
3dB 6dB带宽的定义
3dB带宽:信号的功率谱下降到中频功率的
1/2,或者信号的电平值下降到峰值的0.707 时, fH – fL=B3dB。 6 dB带宽:信号的功率谱下降到中频功率的 1/4 ,或者信号的电平值下降到峰值的1/2 时, fH – fL=B6dB。
fL 和 fH 的定义: 当信号频率降低或升高使得增益A() 下 降到中频增益A0 的1/ 2 倍或0.707倍时对应 的频率,分别称为增益的低端截止频率fL和 高端截止频率fH .