中大智能车参赛手册
全国大学生智能汽车竞赛分赛区比赛-智能车竞赛
第十三届全国大学生智能汽车比赛现场比赛赛道部署参照方案本文档针对第十二届智能车比赛现场比赛赛道部署进行说明。
有关参照文档:1.《第十三届全国大学生智能汽车比赛比赛比赛规则》2.《第十三届全国大学生智能汽车比赛规则增补说明》一、比赛赛题组以及赛道共用方案第十三届智能汽车比赛包含有六个赛题组的比赛。
它们分别是(参加智能车比赛比赛细则):光电四轮、电磁三轮、直立两轮、双车会车、无线节能以及信标组。
其他还有一组创意类只在全国总决赛举行。
依据比赛场馆可用面积、比赛估算、报名队伍数目散布以及场内光芒等,六个组别比赛能够分别铺设场所进行比赛,也能够经过公用处所进行比赛,以节俭比赛场所、铺设花费等。
假如体育馆的屋顶属于开放式、或许半开放式,有激烈的阳光直射到比赛场所,没法对屋顶进行有效遮挡。
这类状况,电磁三轮、直立两轮、无线节能等组别安排在白日比赛,对于光电四轮、双车会车、信标组能够安排在夜晚比赛。
比赛场所能够进行复用。
图1体育馆的屋顶开放形式除非在不得已的状况下,对于同一赛题组的比赛,假如因为队伍数目特别多,能够拆成两个场所同时比赛。
这类方式,因为没法完整保证两个比赛场所的一致性,所以在最后成绩评定的时候简单造成异议。
二、赛道种类、数目赛道种类包含练习赛道、初赛赛道和决赛赛道。
1、练习赛道:练习赛道是用于参赛队伍在比赛行进行现场环境适应时所使用的赛道。
详尽尺寸拜见练习赛道设计文档。
练习赛道大概形状下列图所示:图2练习赛道比赛比赛舞个组其他练习赛道形状都是同样的。
在比赛赛道上设置一个起跑线。
起跑线包含有两种形式:斑马线和永磁铁。
详细制作方式参加后边对于起跑线的规格。
对于光电四轮组,练习赛道上陈设一个活动的路障,便于参赛队伍挪动。
其余赛题组没有路障。
在铺设练习场所的时候,需要在场所内独自铺设两条坡道练习场所。
坡道的设计参照下列图所示:30cm50cm50cm15°13cm图3坡道设计参照尺寸坡道练习赛道长度在三到五米左右,每条练习赛道上,还需要铺设电磁导线以及信号源,以供电磁组练习使用。
智能车比赛策划书3篇
智能车比赛策划书3篇篇一《智能车比赛策划书》一、比赛背景随着科技的不断发展,智能车技术已经成为了当今世界的热门话题之一。
为了提高学生的创新能力和实践能力,培养学生的团队合作精神和竞争意识,我们决定举办一场智能车比赛。
二、比赛目的1. 提高学生的创新能力和实践能力。
2. 培养学生的团队合作精神和竞争意识。
3. 促进学生之间的交流和合作。
4. 推广智能车技术,提高学生对智能车技术的兴趣和认识。
三、比赛时间和地点1. 比赛时间:[具体日期]2. 比赛地点:[详细地址]四、比赛主题“智能驾驶,未来已来”五、参赛对象全体在校学生六、比赛要求1. 参赛队伍需自行设计并制作智能车模型,模型需具备自主行驶、避障、识别等功能。
2. 参赛队伍需在规定时间内完成比赛任务,比赛任务包括但不限于:直线行驶、弯道行驶、避障、停车等。
3. 参赛队伍需在比赛过程中遵守比赛规则,不得使用任何违规手段。
4. 参赛队伍需在比赛结束后提交比赛报告,报告需包括但不限于:模型设计、制作过程、比赛过程、遇到的问题及解决方案等。
七、比赛流程1. 报名阶段([具体日期 1])参赛队伍需在规定时间内填写报名表格,并提交至指定。
报名表格需包括参赛队伍名称、队员姓名、学号、专业、联系方式等信息。
2. 培训阶段([具体日期 2])组织参赛队伍进行培训,培训内容包括智能车模型设计、制作、编程等方面的知识和技能。
培训结束后,参赛队伍需提交培训报告,报告需包括培训内容、收获和体会等。
3. 比赛阶段([具体日期 3])参赛队伍需在规定时间内到达比赛现场,进行签到和抽签。
比赛分为初赛和决赛两个阶段,初赛采用淘汰制,决赛采用积分制。
比赛过程中,参赛队伍需遵守比赛规则,不得使用任何违规手段。
比赛结束后,参赛队伍需提交比赛报告,报告需包括比赛过程、遇到的问题及解决方案等。
4. 颁奖阶段([具体日期 4])举行颁奖仪式,对获奖队伍进行表彰和奖励。
颁奖仪式结束后,组织参赛队伍进行交流和合影留念。
第一届“飞思卡尔”杯全国大学生智能车邀请赛

第二届“飞思卡尔”杯全国大学生智能汽车竞赛比赛事宜说明一、比赛平台与比赛内容1.竞赛秘书处统一提供单片机MC9S12DG128开发板、开发软件Code Warrior和在线调试工具,统一负责采购车模套件。
2.参赛队伍在车模平台基础上,制作一个能够自主识别路线的智能车,在专门设计的跑道上自动识别道路行驶。
3.综合赛车单圈最短时间、技术报告质量等项的分数进行评奖。
4.全国按照地域划分为五个分赛区。
各参赛队伍首先在各分赛区进行预赛,各分赛区的优胜队将参加决赛。
由第二届大赛组委会根据各赛区报名参赛队数确定各分赛区参加决赛的优胜队伍数目。
5.竞赛秘书处提供的单片机开发工具所有权归参赛学校所有,参赛队伍使用它参加比赛。
二、参加比赛整个日程安排1.比赛报名阶段:2006年12月20日至2007年1月20日;2.资格评审阶段:2007年1月20日至2007年1月30日;3.签订比赛协议,发放开发工具以及购买车模套件阶段:2007年2月1日至2007年2月28日;4.分赛区举办联谊会议:2007年3月初(详见各分赛区通知);5.参赛队伍赛车制作调试阶段:2007年3月至2007年6月;6.分赛区举办比赛阶段:2007年7月中旬(详见各分赛区通知);7.参加决赛队伍技术报告提交与评审阶段:2007年8月10日;8.决赛阶段:2007年8月17~20日在上海交通大学;比赛队伍需要完成智能车设计制作,提交完整技术报告。
三、组队规定、报名办法及培训1.组队规定2007年暑期之前在校的本科生及研究生均可以参加比赛;每支参赛队由3名学生组成,其中至少包括2名本科生,另有带队老师1名,每名学生只能参加一支队伍;每个学校不超过2支队伍。
2.报名办法参赛队通过竞赛网站报名。
智能车大赛网站地址:。
参赛队在上面网站相应分赛区网页中填写报名信息,提供学校带有公章推荐信函的扫描图片。
各分赛区组委会通过该网站公布资格认定信息。
参赛队伍在接收到确认参赛资格后,可以通过邮购的方式向大赛秘书处购买车模套件。
中山大学第八届智能车挑战赛参赛手册
一等奖(一队) :3000 元奖金+奖杯+证书 二等奖(两队) :1500 元奖金+证书 三等奖(五队) :800 元奖金+证书
优胜奖(12 队) :200 元奖金+证书 最型外观奖(一队) :500 元奖金 奖项说明 本届比赛奖项评比分为两个部分。 第一部分是智能车竞技赛: 比赛采取时间计, 跑完赛道全程用时最少者获胜; 对于没有完成全程的车辆,
一、活动时间
2015 年 5 月~2015 年 11 月
-3-
中山大学第八届智能车挑战赛参赛手册
二、比赛宗旨
本次比赛的宗旨是给广大爱好智能车的大学生提供一个交流竞技平台。提 高大学生在智能应用方面的动手实践能力和创新思维能力, 培养大学生科学素质 与团队精神,促进各个高校大学生学术活动开展,提高本科教学质量。
中山大学第八届智能车挑战赛参赛手册
中山大学 交通科技协会
第 八 届 智 能 车 挑战 赛
参赛手册
主办单位:中山大学交通科技协会 指导单位:广东省智能交通系统重点实验室 协办单位:暨南大学猎狐无线电协会、华南师范大 学无线电协会、 华南理工大学无线电爱 好者协会、 华南农业大学车迷协会、 广东 工业大学无线电社、广州大学电子协会
器材限制规定
1、 赛车内部构造可以采用原有核心控制单元进行改装,也可以自主构思控制及 系统设计等。但不允许有遥控设备。 2、 赛车探测用传感器不限,可以是超声波、红外、视频等。 3 、参赛作品尺寸不能超过:宽 250mm,长 400mm,高度无限制。 4 、 参赛作品电源为市售的 5 号碱性电池或 5 号镍氢充电电池(参赛队伍自备) , 每辆赛车最多可同时使用 6 节,不能使用组装电池。
三、参赛对象
广州市内各高校正式注册并在校的本科学生。 各高校其他校区学生也可组队 报名参赛。学生自由组成参赛团队,参赛团队可以跨专业、跨学院、跨校区,跨 学校组建。参赛团队至少由二名同学组成(建议不超过六人) 。 为提高团队合作意识,大赛只接受组队报名。
18届智能车规则

18届智能车规则1.赛事介绍智能车比赛是一项电子竞技赛事,旨在推动智能车技术的发展与应用。
参赛队伍需设计和制作一辆能够自主行驶的无人驾驶车辆,并在规定的赛道上完成多项任务。
2.参赛队伍要求2.1参赛队伍需由本校学生自愿组成,每队人数不得超过10人。
2.2队员需具备基本的电子技术、机械设计和编程能力。
2.3队伍可自由选择使用的设备和材料,但需符合安全规范。
3.比赛任务3.1赛道:赛道由多个道路组成,包括直线、弯道、十字路口等。
赛道将根据难度等级进行划分。
3.2任务:参赛车辆需在指定时间内完成多项任务,包括避障、匀速巡航、减速停车等。
任务完成情况将根据时间和准确性进行评分。
4.赛车要求4.1智能系统:参赛车辆需搭载智能系统,包括传感器、控制算法和决策系统等。
智能系统应能够实现实时感知、决策和控制。
4.2电力系统:参赛车辆需搭载电力系统,包括电池、电机和驱动器等。
电力系统应稳定、安全,并能满足比赛要求。
4.3机械结构:参赛车辆需具备稳定的机械结构,包括底盘、轮子和悬挂等。
机械结构应能够承受各种路况和动作要求。
4.4控制系统:参赛车辆需搭载控制系统,包括主控板、传感器接口和执行器接口等。
控制系统应能够稳定、快速响应和可靠工作。
5.裁判与评分5.1赛事裁判由组委会指定,由专业人员和教师组成。
裁判负责管理和监督比赛过程,确保公平和安全。
5.2评分标准:裁判将综合考虑比赛任务完成的时间、准确性和稳定性等因素进行评分,并根据得分确定名次。
5.3争议解决:如有参赛队伍对裁判判决有异议,可提出申诉,并由组委会进行复核和裁决。
6.安全与风险防控6.1参赛车辆需符合相关的安全标准,包括防护装置、电气安全和机械结构强度等。
车辆的设计和制作应遵循国家和地方的相关法规和标准。
6.2在比赛中,参赛队伍需按照规定的时间段进行实车测试,严禁在非指定区域进行测试,以免造成意外。
6.3参赛队伍需对车辆进行风险评估和防控,确保比赛过程中没有人员和设备安全事件。
第六届全国大学智能汽车竞赛比赛比赛参考技_术规范
第六届全国大学智能汽车竞赛赛区现场比赛参考规范一、赛车技术检查规范:1、检查时间:技术检查分为三个阶段:第一阶段检查:预赛当天,各参赛队伍在比赛正式开始之前,各参赛队伍将车模放置在赛场车模展示台上。
这个过程中,由专家组成员对于参赛队伍提交的车模进行外观和配件的检查。
由于规定选手可以在比赛过程中更换电池,所以提交车模时,各参赛队提交的车模除了电池之外,其他的部件均应该提交。
第二阶段检查:在预赛比赛过程中,由专家组成员对于放置在车模展示台中的车模进行详细的技术检查。
对照各参赛队伍提交的《车模技术统计表格》中的内容对于车模展示台上的车模逐一进行技术检查。
检查依据:●《竞赛比赛细则》附件二:电路器件及控制驱动电路限制要求。
●各参赛队伍提交的《车模技术统计表格》检查结果应该在预赛比赛当天得出。
保证所有参加第二天决赛的车模在技术上都符合比赛要求。
2、检查内容和规范:(1)车模尺寸和外观检查:车模尺寸不能超过250mm ×400mm,高度没有限制。
电磁组车模的长度没有限制。
具体方法参考如下:i.制作一个方框,或者地面绘制一个矩形,其内部尺寸为250mm ×400mm。
ii.检查车模是否可以通过方框,或者是否可以放置在矩形框内。
注意:检查过程中,请注意是否车模机械部分有可以活动部分。
如果有,则询问参赛队员是否这些活动部分在比赛过程中可以展开,以至于车模的外形尺寸超出规则限制。
检查过程中,如果车模尺寸超出了限制,则请参赛队员对于车模机械结构进行调整。
如果调整无法满足要求,则拒绝参赛车模入场。
车模底盘原则上不得改动。
除了为了安装、调整所进行的少量修改。
(2)传感器检查:●车模的路径检测传感器种类是否符合赛题中要求的检测路径的方法。
即判定是否符合光电组、摄像头组和电磁组的要求。
●传感器的数量是否符合小于16个。
传感器应该包括路径检测的传感器以及其他的辅助传感器。
例如光电管、CCD、加速度传感器、振动传感器等。
十八届智能车规则
十八届智能车规则十八届全国智能车竞赛是由中国汽车技术研究中心主办的一项大型科技赛事,旨在推动智能汽车技术的发展,促进智能交通系统的应用。
为了确保比赛的公平公正和安全可控,组委会针对智能车竞赛制定了一系列规则,以下是对十八届智能车规则的详细介绍。
一、总则1.1本规则适用于所有参加十八届全国智能车竞赛的车辆和参赛队伍。
1.2本规则的目的是确保参赛车辆的安全性和技术可行性,规范比赛过程,评定成绩。
1.3参赛队伍必须严格遵守比赛规则,服从组委会的指挥和安排。
二、参赛车辆2.1参赛车辆必须是自主研发或改造的智能车。
2.2参赛车辆应符合国家车辆安全标准,确保车辆的安全性和稳定性。
2.3车辆的外观设计应符合智能车竞赛的要求,必须明确指示车辆的前后方向。
2.4车辆应搭载符合规定的传感器、控制系统和通信设备,保证车辆具备核心的智能驾驶功能。
三、比赛项目3.1环形赛道3.1.1参赛车辆需自动行驶在环形赛道上,完成规定的圈数。
3.1.2参赛车辆行驶过程中应遵守交通规则,确保安全行驶。
3.1.3在比赛中,参赛车辆应具备障碍物避让、车道选择和速度控制等基本驾驶技能。
3.2障碍物避让3.2.1参赛车辆需自动识别并绕过设在赛道上的障碍物,完成指定路线。
3.2.2车辆在避让障碍物的过程中应做到平稳、准确,不得造成碰撞或其他意外。
3.2.3车辆的避障控制系统应具备高效的障碍物识别和判断能力,保证行驶的可靠性。
3.3停车场导航3.3.1参赛车辆需自动行驶至指定停车场,并完成精确的停车动作。
3.3.2车辆应准确识别停车场的位置和停车位的布局,遵循停车规则完成停车。
3.3.3车辆的导航系统应具备高精度的定位和导航能力,确保停车动作的准确性。
3.4交通信号灯3.4.1参赛车辆需识别并正确应对路口交通信号灯的指示。
3.4.2车辆应准确判断信号灯的颜色和变化规律,并根据信号灯的指示进行相应的行驶和停止动作。
3.4.3车辆的图像处理和计算系统应具备高速度、高准确度的信号灯识别和判断能力。
中山大学第八届智能车挑战赛参赛手册重点
中山大学第八届智能车挑战赛参赛手册附录 1--S 型弯道说明 S 型弯道形状 1.赛道中间有一个缺口,若从缺口冲出赛道而未能在 30 秒内自动返回到赛道,即视为比赛失败。
2.赛道中 S 型弯道会根据实际情况作出调整,包括赛道位置设置, S 型弯道的弯曲形状等,不保证初、决赛赛道一致,最终情况以比赛当天情况为标准,最终解释权为大赛组委会所有。
- 11 -
中山大学第八届智能车挑战赛参赛手册附录二—引导线说明岔道标志岔道标志 1、在引导线处的岔道标志表示赛车在标志处必须按标志进行转向,转车方向为岔道标志所在方向,短线为迷惑赛道,意为考察赛车的识别和转向能力。
2、若赛车进入迷惑赛道而不能回到原来道路,则视为比赛失败。
最终解释权归主办方所有。
- 12 -
中山大学第八届智能车挑战赛参赛手册附录三—电池说明参赛所用电池必须为市面上容易购买,具有厂家信息和品牌的普通 5 号电池,可以是充电电池。
但是可以自己组装为电池组。
照片所示的电池无厂家信息和品牌,不符合要求,需要更换。
本手册最终解释权归大赛组委会所有 - 13 -。
十八届智能车规则
十八届智能车规则十八届智能车规则引言智能车竞赛作为一种新兴的比赛形式,其参赛者不仅需要具备机械、电子等专业知识,还需要具备较高的软件编程和算法设计能力。
为了保证比赛的公平、公正,保证选手以及观众的安全,制定本规则。
一、参赛资格1. 参赛队伍必须由3-5名成员组成,其中至少有1名本科生或研究生。
2. 参赛队伍必须在规定时间内完成报名手续,并提交相关材料。
3. 参赛队伍必须具备基本的机械、电子、计算机等专业知识,并且能够熟练运用相关软件和硬件设备。
二、比赛场地1. 比赛场地应当是平坦、宽敞、无障碍物的室内或室外空间。
2. 比赛场地应当设置起点和终点,并且标明路线和障碍物等信息。
3. 比赛场地应当设置观众席,并严格控制观众行为,保证选手和观众的安全。
三、比赛装备1. 比赛装备包括智能车、遥控器、传感器等硬件设备,以及相关软件和算法。
2. 智能车必须符合规定的尺寸和重量,并且能够熟练运行各种功能。
3. 遥控器必须具备良好的反应速度和稳定性,并且能够准确控制智能车的移动和操作。
4. 传感器必须具备高精度、高灵敏度、高可靠性,并且能够准确感知周围环境的信息。
5. 相关软件和算法必须符合比赛规则,且能够实现智能车的自主导航、避障等功能。
四、比赛规则1. 智能车比赛分为多个环节,包括起点加速、直线行驶、弯道转弯、障碍物避让等环节。
2. 参赛队伍必须按照规定时间内完成各个环节,并在规定时间内到达终点。
3. 参赛队伍在比赛过程中不得干扰其他参赛队伍,不得使用任何违规设备或手段,如发射干扰信号等。
4. 参赛队伍在比赛过程中必须遵守比赛规则,如不得逆行、碰撞障碍物等。
5. 参赛队伍在比赛过程中必须保证智能车的安全,如发现智能车出现异常情况,应立即停止操作并报告裁判组。
五、比赛评分1. 比赛评分根据参赛队伍完成各个环节所用时间和准确度进行评定。
2. 参赛队伍完成各个环节所用时间越短,得分越高;准确度越高,得分越高。
3. 参赛队伍在比赛过程中出现违规行为或者智能车出现故障等情况,将扣除相应的分数。
2018年重庆大学智能车竞赛细则

2018年重庆大学智能车竞赛细则一、车模要求1. 基本要求与分类比赛选手须使用竞赛秘书处统一指定的竞赛车模套件,大赛根据车模检测路径方案不同分为四轮光电组、三轮电磁组、两轮直立组、双车会车组和无线节能组和信标对抗组6个赛题组。
车模的制作要求与第十三届“恩智浦杯”全国大学生智能汽车竞赛主委会给出的制作要求完全一致。
2.车模规定●禁止改动车底盘结构、轮距、轮径及轮胎,如有必要,可以对车模中的零部件进行适当删减。
●禁止采用其他型号的驱动电机,禁止改动驱动电机的传动比。
●禁止改造车模运动传动结构。
●禁止改动舵机模块本身,但对于舵机的安装方式,输出轴的连接件没有任何限制。
●禁止改动驱动电机以及电池,车模前进的动力必须来源于车模本身直流电机及电池。
●禁止增加地面支撑装置,在车模静止、动态运行过程中,只允许车模原有四个车轮对车模起到支撑作用,对于电磁平衡组,车模直立行走,在比赛过程中,只允许原有车模两个后轮对车模起到支撑作用。
●为了安装电路、传感器等,允许在底盘上打孔或安装辅助支架等。
●车轮参赛车模的车轮需要是原车模配置的车轮和轮胎,不允许更改使用其它种类的车轮和轮胎,不允许增加车轮防滑胶套。
如果车轮损坏,则需要购买原车模提供商出售的车轮轮胎。
允许对于车轮轮胎做适当打磨。
如果原轮胎有花纹,则要求原轮胎花纹痕迹打磨后依然能够分辨;如果原轮胎无花纹,则不允许对轮胎雕刻花纹。
3. 电路器件及电路制作限制●须采用飞思卡尔半导体公司的8位、16位、32位处理器作为唯一的微控制器,使用片数不受限制。
●伺服电机数量不超过3个,除了原车模配置的转向舵机外,新增加舵机的型号必须由广东博思公司提供的舵机FUTABA3010或者由北京科宇通博科技有限公司提供的S-D5舵机。
●传感器数量不超过16个。
传感器数量统计规则如下:光电传感器接收单元记为一个传感器,发射单元不计算。
CCD传感器记为一个传感器。
磁场传感器在同一个位置可以有不同的方向传感器,记为一个传感器。
第十八届智能车竞赛规则
第十八届智能车竞赛规则1.比赛介绍。
第十八届智能车竞赛分为初赛和复赛两个阶段,比赛主要针对微型智能车作品进行竞赛,目的是通过比赛的形式,推广智能车制作技术及其应用。
2.参赛要求。
2.1队伍人数:每支队伍3到5人,其中必须有一名队长负责队伍报名、交接材料等事宜。
2.2可供参赛装备:参赛队伍需自备微型智能车,其它相关设备及材料需自行购买。
2.3报名时间:初赛报名截止日期为XX月XX日,复赛报名截止日期为XX月XX日。
3.微型智能车规格。
3.1 外壳尺寸:长宽高不超过 250mm x 250mm x 200mm。
3.2 重量要求:重量不超过 1.5kg。
3.3电源要求:使用电池供电,电池电压不得超过12V,电池容量不得超过10000mAh。
3.4推进器要求:微型智能车必须自带至少一种推进器,并配有相应的控制器。
4.初赛项目。
4.1直线行驶:智能车需通过一段直线道路,行驶距离不少于3米。
4.2交通信号灯识别:车辆需识别交通信号灯红、绿灯状态,并按照相应的状态作出对应的行驶决策。
4.3立交桥通行:智能车需通过一个模拟立交桥的测试场地,测试场地包含连续上下坡、拐弯等障碍。
4.4避障行驶:智能车需通过一个障碍物测试场地,场地中包含模拟障碍物和环卫设施等障碍,智能车需在场地内行驶并避开障碍。
5.复赛项目。
5.1自动泊车:智能车需在停车场内自动找到一个空闲车位,并完成自动停车操作。
5.2车道保持:智能车需在模拟公路道路上保持车道行驶,同时要求保持安全距离并正确识别道路标志和交通信号灯。
5.3环路行驶:智能车需在环形路口内行驶,并保持安全距离和正确的行驶轨迹。
5.4模拟城市道路行驶:智能车需在模拟城市道路内行驶,场地包含丰富的道路情景,包括路口、人行横道、交通信号灯、红绿灯、超市等。
6.颁奖及评选。
6.1初赛排名:按照初赛得分从高到低进行排名,前三名队伍晋级复赛。
6.2复赛排名:按照复赛得分从高到低进行排名,前三名队伍分别获得一等奖、二等奖、三等奖。
智能车竞赛规则

智能车竞赛规则1. 背景介绍智能车竞赛是一项以人工智能技术为基础的比赛,旨在通过模拟真实道路交通环境,测试智能车辆的自主驾驶能力和交通规则遵守程度。
比赛中,参赛车辆需要通过感知、决策和控制等环节,模拟真实驾驶过程,完成规定的任务。
2. 比赛规则概述智能车竞赛规则主要包括以下几个方面:2.1 参赛资格参赛车辆必须是具备自主驾驶能力的智能车辆,能够通过感知设备获取道路环境信息,并根据规则进行决策与控制。
参赛车辆必须符合相关交通规定,且驾驶员必须具备相关驾驶资格。
2.2 比赛场地比赛场地模拟真实道路环境,包括直线道路、弯道、十字路口、交通信号灯等。
场地应具备足够的安全措施,确保参赛车辆和观众的安全。
2.3 比赛任务比赛任务根据实际道路交通环境设计,包括车辆起步、直行、转弯、超车、停车等操作。
参赛车辆需要根据场地上的标志、标线、交通信号灯等信息,合理规划行驶路径,完成指定任务。
2.4 评分标准参赛车辆的评分主要考虑以下几个方面:行驶稳定性、遵守交通规则、感知准确性、决策及时性、任务完成度等。
评分标准应事先公布,确保公平公正。
2.5 竞赛组别智能车竞赛可以根据参赛车辆的不同特点和能力,划分为不同的竞赛组别。
例如,可以分为初级组、中级组、高级组等,以便更好地评估和比较不同车辆的性能。
3. 比赛流程详解3.1 报名与资格审核参赛车辆需在规定时间内完成报名,并提交相关材料进行资格审核。
审核通过后,方可参加正式比赛。
3.2 车辆检查与测试参赛车辆需在比赛前进行车辆检查与测试,确保车辆的安全性和性能符合要求。
检查项目包括但不限于:车辆外观、感知设备、决策与控制系统等。
3.3 比赛场地布置比赛前,组织者需要根据比赛任务的要求,对比赛场地进行布置。
包括设置标志、标线、交通信号灯等,模拟真实道路环境。
3.4 比赛规则说明在比赛开始前,组织者需要对比赛规则进行详细说明,确保参赛选手充分理解比赛要求和评分标准。
3.5 比赛过程比赛过程中,参赛车辆按照规定的顺序进行比赛。
2014智能车邀请赛比赛说明

9 物流系统管理与控制,包括智能车配载 RFID、蓝牙、WIFI 等 无线设备,能够实现设备互联,利用传感器、智能算法和物
2014 第十届“博创杯”全国大学生 嵌入式物联网设计大赛
智能车邀请赛比赛说明
目录
一、赛项背景 ................................................................................... 2 二、赛项介绍 ................................................................................... 2 三、参赛条件 ................................................................................... 3 四、比赛组成 ................................................................................... 3 五、赛项平台 ................................................................................... 3 六、比赛方式 ................................................................................... 8 七、报名方式 ................................................................................... 8 八、 比赛规则................................................................................ 9 九、评分标准 ................................................................................. 10 十、赛场规定 ................................................................................. 11 十一、参考命题 ............................................................................. 14
中山大学第四届智能车设计

祝大家第四届智能车挑战赛中 取得好成绩
调试相关
• 无线串口(防止撞车) • Codewarrior5.0里的BDM调试 • VC++编写的图像显示界面
PID控制算法
比例(P)、积分(I)和微分(D)
• 获取赛道图像,提取中心引导线 • 对提取的引导线作加权平均,得出控制中心,即 当前误差error • 对于智能车一般只使用PD控制 • 对于一个固定的时间间隔,摄像头智能车一般取 一个场中断的时间,先记录上一个间隔时间的误 差pre_error=error,然后根据当前采集的引导线 更新当前误差error • 舵机PWM的输出: PWM=Kp*error+Kd*(error-pre_error) Kp为比例系数,Kd为微分系数
智能车设计
C201队:黄开德(队长)
黄鹏 温泽宏
我们的私家车
私家车的英姿
传感器(获取道路信息)
转 向 部 分
舵 机
舵 机
转 向 部 分
单片机(软件部分,处理信息 和控制输出)
驱 动 部 分
H 桥 驱 动
速度反馈 编码器
H 桥 驱 动
驱 动 部 分
车模
• 价值380元 • 四轮驱动 • 一个380型号电机 • 舵机转向
电池
• 充电电池6节,价值不超过100元。 • 手工焊接串联使用
传感器
• 数字摄像头一个 • 价值约150元 • 前瞻约2米
微处理器(单片机)
• • • • • • MC9S12XS128(80引脚) 价值约100元 可超频至88Mhz 8路12位精度AD 使用两片IRF3205和两片IRF4905 场效应管搭建的H桥驱动电路 • 价值约20元 • 容易出问题,可使用BTS7960半桥 驱动芯片代替
电磁组 中山大学电磁组2队技术报告
第七届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:中山大学队伍名称:电磁2队参赛队员:李小锟黄志杰誉洪生带队教师:成慧钱宁关于技术报告和研究论文使用授权的说明本人完全了解第七届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:摘要本论文中设计的智能车系统采用飞思卡尔公司的kinetisK60作为控制核心,以IRF3205和IRF4905为电机驱动模块,通过编码器获得电机速度信息。
使用由电感及放大电路组成的传感器获取赛道信息;在智能车控制方面,基于位置式及增量式的PID控制算法在高速行驶赛车的路径优化和速度控制上有着不错的效果。
为了提高车的速度和稳定性,我们使用VC、无线通讯模块、等多种调试工具。
结果表明,本系统可靠有效。
关键词:kinetisK60,IRT3205, IRF4905,PIDAbstractWe design the smart car system based on the control of kinetisK60 in this paper. We choose IRF3205 and IRF4905 to be the motor drive, and encoder to feedback the speed of the motor. We use electrical inductance to get the information of the track. During the control of the smart car, the positional PID and Increasing PID perform good on path optimization and speed control in high speeding pattern. In order to improve the speed and the stability of the smart car, we use kinds of methods, such as VC, wireless module . It turned out that the system is reliable and effective.Keyword:kinetisK60,IRT3205, IRF4905,PIDIII目录摘要 (Ⅱ)Abstract (Ⅲ)第一章引言........................... 错误!未定义书签。
工学院智能汽车比赛比赛规则
工学院首届智能汽车挑战赛事宜说明参赛选手自己购买车模和其他部件,可以改装成品车,也可完全自主设计,鼓励创新。
参赛队伍之名次由赛车成功完成赛道比赛时间为主,技术方案及制作工程质量评分来辅助决定。
在实际可操作性基础上力求公正与公平参与。
一、器材限制规定1.内部构造可以采用核心控制单元,可以自主构思控制及系统设计等。
不允许有遥控设备。
2.参赛作品尺寸不能超过:宽250mm,长400mm,高度无限制。
3.电源为5号干电池,由组委会提供,每支参赛队伍4节。
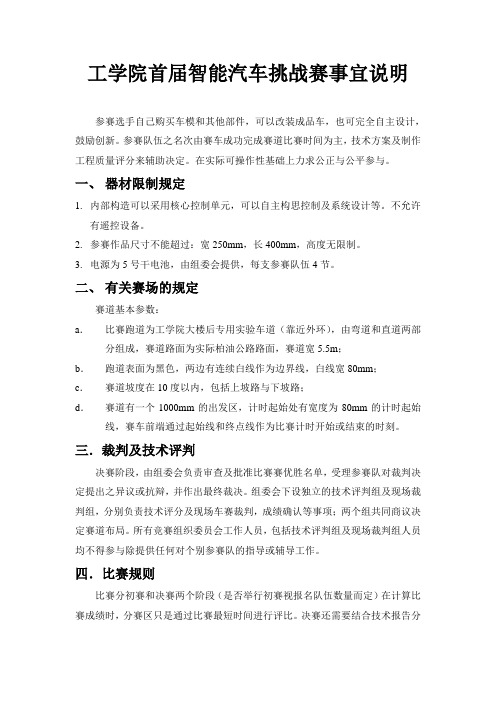
二、有关赛场的规定赛道基本参数:a.比赛跑道为工学院大楼后专用实验车道(靠近外环),由弯道和直道两部分组成,赛道路面为实际柏油公路路面,赛道宽5.5m;b.跑道表面为黑色,两边有连续白线作为边界线,白线宽80mm;c.赛道坡度在10度以内,包括上坡路与下坡路;d.赛道有一个1000mm的出发区,计时起始处有宽度为80mm的计时起始线,赛车前端通过起始线和终点线作为比赛计时开始或结束的时刻。
三.裁判及技术评判决赛阶段,由组委会负责审查及批准比赛赛优胜名单,受理参赛队对裁判决定提出之异议或抗辩,并作出最终裁决。
组委会下设独立的技术评判组及现场裁判组,分别负责技术评分及现场车赛裁判,成绩确认等事项;两个组共同商议决定赛道布局。
所有竞赛组织委员会工作人员,包括技术评判组及现场裁判组人员均不得参与除提供任何对个别参赛队的指导或辅导工作。
四.比赛规则比赛分初赛和决赛两个阶段(是否举行初赛视报名队伍数量而定)在计算比赛成绩时,分赛区只是通过比赛最短时间进行评比。
决赛还需要结合技术报告分数综合评定。
1.初赛与决赛规则⑴初赛规则i.参赛队伍以抽签形式决定组内比赛次序。
ii.从两组比赛队伍中,选取成绩最好的20支队伍晋级决赛。
iii.技术评判组将对全部晋级的赛车进行现场技术检查,如有违反器材限制规定的当时取消决赛资格,由后备首名晋级代替;由裁判组申报组委会执委会批准公布决赛名单。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中山大学第六届智能车挑战赛参赛手册指导单位:中山大学工学院智能交通中心主办单位:中山大学交通科技协会协办单位:中山大学工学院团委、广东工业大学无线电社、广州大学电子协会、华南师范大学无线电协会、华南理工大学无线电爱好者协会、华南农业大学车迷协会一、比赛概况为了加强大学生的科技创新意识、合作精神、实践能力的培养,由中山大学工学院智能交通研究中心发起,中山大学交通科技协会主办,在智能交通研究中心和现代设计中心的指导下,于2007年在中山大学东校区成功举办了第一届智能汽车挑战赛。
经过广泛而多渠道的宣传,第一届智能车大赛参赛队伍达到60支,共有29支队伍在初赛中脱颖而出,进入决赛。
在大赛保证公平、公正、公开的基本原则的前提下,决赛中各队表现优异,共有11支队伍跑完了300米全程,前6名队伍分获一、二、三等奖, 18支队伍获得优胜奖。
第一届智能汽车挑战赛为广大中大学子提供了展现自主创新能力和实践能力的平台。
中山大学作为全国的著名学府,就是要培养创新型的人才。
大赛中各参赛队伍充分发扬了创新和合作精神,参赛选手采用了超声波、红外线等传感技术,展示了精湛的程序设计能力,灵活运用红外定位、超声定位、高低频率电路、单片机控制等技术,充分展示了中大学子对智能汽车的创新思维和动手实践的能力。
借着首届智能汽车挑战赛的东风,第二届智能汽车大赛将参赛范围扩大至大学城,大赛规模空前盛大,如火如荼。
各方学子齐聚一堂,同台竞技,精彩纷呈。
同时,成绩相比于第一届不断刷新,来自工学院2006级智能交通专业的Default 队以44.06秒的成绩刷新纪录获得一等奖,与第一届的最佳成绩相比,缩短了20多秒时间。
在众多参赛队伍中,新技术更是广泛地被应用,挑战者队利用了视频技术进行路线选择,获得创新技术大奖。
大赛成为大学生智能汽车梦想翱翔的平台,是思维与实践的结晶,成为华南地区交通科技类竞赛的亮点之作,在工学院各级领导、老师的大力支持和团委学生会成员的辛勤劳动下取得了圆满成功。
相继,分别于2010年、2011年2012年举办了第三届、第四届、第五届智能车挑战赛。
成绩一年比一年好,活动也渐渐走向成熟,吸引了更多的外校队伍参赛。
第四届智能车报名参赛队伍达140支,分别来自各大高校。
第四届冠军队伍名为荔枝队,来自中山大学信息科学与技术管理学院,他们以33秒49的优异成绩夺得第一。
并创造了又一个新纪录。
这是参赛者们的不断努力的成果。
第五届智能车赛更是高手辈出,在初赛保存实力的happymore队在决赛的时候变爆发了,夺得了冠军。
成绩更你比上一届的要好。
在前五届智能汽车挑战赛取得圆满成功和较大影响力的基础下,中山大学智能交通研究中心决定举办第六届智能车挑战赛,但此时已不在满足于仅限于大学城等高校,在第六届智能汽车挑战赛中,将面向整个广州市,接受整个广州市的高校学生进行报名,届时其规模不言而喻,将由中山大学交通科技协会全程承办。
二、活动时间2012年12月~2013年9月三、活动宗旨举办本次大赛的目的为了培养大学生的科技创新精神和实践能力,提高大学生科学素养,培养学生的团队精神,激发学生在智能应用方面的思考和创新,促进高校大学生学术活动开展,提高本科教学质量。
四、参赛对象广州市内各高校正式注册并在校的本科学生。
各高校其他校区学生也可组队报名参赛。
学生自由组成参赛团队,参赛团队可以跨专业、跨学院、跨校区,跨学校组建。
参赛团队至少由二名同学组成(建议不超过六人)。
为提高团队合作意识,大赛只接受组队报名。
五、报名规定报名时间:3月3日——4月14日报名方式:1、3月23日在三饭前摆摊报名点现场报名(中大)(具体时间暂定)2、3月17、18日在各高校宣传报名点现场报名3、于协会网站/ 下载报名表填写后发送至协会邮箱zhongdajiaoxie@报名注意事项:1、报名时应注意填写完整的个人信息;2、报名截止时间之后提交的报名表无效;3、报名队伍应在正式比赛前制作好比赛车辆,如有特殊情况无法提交作品应8月20日前向大赛组委会说明情况并宣布弃权,没有提前告知无故弃权的队伍将取消下一届的参赛资格。
六、大赛规则奖项设置比赛将根据最终评比结果,评出下述各奖项和奖励:✧一等奖(一队):3000元奖金+奖杯+校级证书✧二等奖(两队):1500元奖金+校级证书✧三等奖(五队):800元奖金+校级证书✧优胜奖(12队):200元奖金+校级证书✧优秀DV奖(三队):200奖金✧设计创意奖(不定):500元奖金奖项说明第六届智能车挑战赛与往届不同的是,比赛将分为两个部分:➢第一部分是智能车竞技赛:参赛选手可以自己购买车模和其他部件,改装为成品车,也可完全自主设计,鼓励创新。
参赛队伍应给参赛作品附加一份500字以上的介绍或者技术报告。
参赛队伍之名次由赛车成功完成赛道比赛时间为标准成绩,用时最少者获胜;对于没有完成全程的车辆,由赛车完成的行驶距离为标准评定成绩,距离远者胜。
大赛设立一等奖1名、二等奖2名、三等奖5名。
凡进入决赛的队伍即可获得优胜奖,但不与一、二、三等奖重复,总12名。
在比赛中采用新技术、新思路等创新手段的队伍可获得设计创意奖,可与其他奖项重复。
➢第二部分是智能车风采赛:参赛选手可将自己制作智能车的过程拍摄成DV或者将过程中所拍摄的照片制作成视频,鼓励各参赛队伍把过程中的苦与乐同大家一起分享。
参赛作品的总分为12分,其中2分为比赛成绩分(一等奖2分,二等奖1.5分,三等奖1分,优胜奖0.5分,未获奖0分,创意奖1分),10分为作品评分(我们将邀请三~五位老师作为评委嘉宾对作品进行评定,取平均分作为作品评分)。
器材限制规定1、赛车内部构造可以采用原有核心控制单元进行改装,也可以自主构思控制及系统设计等。
但不允许有遥控设备。
2、赛车探测用传感器不限,可以是超声波、红外、视频等。
3 、参赛作品尺寸不能超过:宽250mm,长400mm,高度无限制。
4 、参赛作品电源为市售的5号碱性电池或镍氢充电电池(参赛队伍自备),每辆赛车最多可同时使用6节,不能使用组装电池。
有关赛场的规定赛道基本参数:1、比赛跑道为工学院大楼后专用实验车道(靠近外环),赛道包括直道和弯道,赛道路面为柏油路面,路面不定点有排水沟井盖,赛道宽度最窄处不小于3m,赛道总长约300m;赛道以比赛当天状况为准(包括路面潮湿、直径不大于1CM的杂物、路面不可清除的斑点或标记等),弯道半径不小于一米。
赛道最终解释权归主办方。
2、跑道表面为黑灰色,赛道两侧以路缘石和护墙为边界(路缘石和护墙高度不低于100mm),赛道中间设有白色或黄色的路径中心引导线,线宽160mm;3、赛道坡度在10度以内,包括上坡路与下坡路;4、赛道有一个1000mm的出发区,赛道起始处有宽度为160mm的起始线,终点处有3条宽度分别为160mm的标志线。
(详见附页图片)(终点处有三条标志线,以第三条为最终终点),车子必须通过第三条标志线。
裁判及技术评判:组委会下设独立的技术评判组及现场裁判组,分别负责技术评分及现场车赛裁判,成绩确认等事项;两个组共同商议决定赛道布局。
所有竞赛组织委员会工作人员,包括技术评判组及现场裁判组人员均不得参与提供任何对个别参赛队的指导或辅导工作。
比赛规则比赛分初赛和决赛两个阶段。
1.初赛与决赛规则⑴初赛规则a)参赛队伍以启动大会中的抽签号码决定比赛次序。
b)每支决赛队伍有两次比赛机会,取两次中最好成绩为最终成绩。
从两组比赛队伍中,选取成绩最好的20支队伍晋级决赛。
c)比赛签到后,比赛过程中参赛车辆由组委会保管,参赛选手比赛时才可以领取赛车进行比赛,除更换电池外,不得对车辆进行改动。
d)技术评判组将对全部晋级的赛车进行现场技术检查,如有违反器材限制规定的取消决赛资格,由后备首名晋级代替;由裁判组申报组委会执委会批准公布决赛名单。
⑵决赛规则a)参加决赛队伍按照预赛成绩进行排序,比赛顺序从第20名开始至第1名结束,比赛共进行两轮,即每支决赛队伍有两次比赛机会,取两次中最好成绩为最终成绩。
b)不保证决赛赛道与预赛赛道相同。
c)比赛签到后,比赛过程中参赛车辆由组委会保管,参赛选手比赛时才可以领取赛车进行比赛,除更换电池外,不得对车辆进行改动。
d)初赛成绩不记入决赛成绩,只决定决赛比赛顺序。
2.比赛过程规则i.按照比赛顺序,裁判员指挥参赛队伍顺序进入场地比赛。
同一时刻,一个场地上只能有一支队伍进行比赛。
ii.在裁判员点名后,每队指定一名队员领取赛车进入比赛场地,将赛车放置在赛道出发区。
iii.裁判员宣布比赛开始后,赛车应在30秒之内驶过起始线,进入计时区域,否则判定为本轮比赛失败。
iv.比赛计时开始时刻为裁判员宣布比赛开始的时刻;v.比赛计时终值时刻为赛车整体越过终点处第三条标志线的时刻;vi.比赛结束条件,a)赛车整体通过终点线;b)赛车中途停止,且在30秒内不能继续移动;c)选手宣布停止;vii.比赛成绩以赛车完成比赛的用时为标准,用时短者为胜;赛车没有到达终点,比赛成绩只记录赛车行驶距离,不计算行驶时间;viii.比赛结束参后赛选手应将赛车放置回检录区。
3.比赛犯规与失败规则比赛过程中,赛车碰撞路缘石或者护墙判定为犯规,一次碰撞犯规增加3s 的比赛时间。
选手可以在赛车碰撞后放弃比赛,但未放弃之前不能人为对赛车的状态进行干预。
赛车在比赛中途停止,并且在30秒内不能继续出发则判定比赛结束;比赛过程中如果出现有如下一种情况,判为比赛失败:i.赛前,赛车没有通过技术检验。
ii.裁判点名后,2分钟之内参赛队没有能够进入比赛场地并做好比赛准备;iii.比赛开始后,赛车在30秒之内没有离开出发区;iv.比赛开始后未经裁判允许,选手接触赛车;v.如果比赛失败,则不计成绩。
参赛队伍不得随意更改赛道甚至毁坏赛道,违者取消比赛资格。
4.比赛成绩规则在计算比赛成绩时,首先通过完成比赛的最短时间进行评比,如未完成比赛以行驶距离为评比条件,但成绩应低于完成比赛的队伍。
进入并参加决赛的队伍都可以获得优胜奖,但已获一、二、三等队伍不再获得优胜奖。
5.比赛禁止事项i.不允许在赛道周围安装辅助照明设备及其它辅助传感器等;ii.选手在比赛过程中,除了可以更换电池之外,不允许进行任何硬件和软件的修改;iii.比赛场地内,除了裁判与1名队员之外,不允许任何其他人员进入场地;iv.不允许其它影响赛车运动的行为;v.比赛过程中,除下雨天气会损坏车辆电路设备外,参赛队伍不得以任何理由延迟比赛(包括路面潮湿等),如有特殊原因,参赛队伍应提前30分钟告知主办方,经主办方同意后才可调整比赛次序。
vi违反上述禁止事项的队伍,将被取消比赛成绩。
七、其他1.比赛过程中有作弊行为的,取消比赛成绩及下一届比赛参赛资格;2.参赛作品的著作权归属参赛者本人,比赛举办方可以在相关主页上收录并公开获奖作品的设计方案、技术报告及参赛模型车的视频、图像资料。