【精品课件】机械的摩擦与效率
第5章(摩擦和效率)
Ff
y
x
α
G
y
(2) 求Fmin
FN
∑ X = 0 : Fmin cosα − G sin α + F f = 0 ∑Y = 0 :
Fmin FN − Fmin sin α − G cos α = 0
F'
补充 F f = fFN
tan α − f =G 1 + f tan α
Nd = N1 + N2 + ⋅⋅⋅⋅⋅⋅ Nk 1 N1 η1 N’1 2 N2 η2 N’2
Nd Nk •••••• k ηk N’k
总输出功率
Nr = N’1 + N’2 + ⋅⋅⋅⋅⋅⋅ N’k
效率 η =
N r N 1η1 + N 2η 2 + ⋅ ⋅ ⋅ + N kη k = Nd N1 + N 2 + ⋅ ⋅ ⋅ + N k
Ff
x
α
G
令 f = tan φmax
FN
Fmin = G tan(α − ϕ )
G tan (α − ϕ ) ≤ F ≤ G tan (α + ϕ )
机械原理 —— 机械的效率和自锁
补充例题2
物体重为G, 放在倾斜角为α的斜面上, 物体与斜面的摩擦系数为f。 1. 求物体平衡时,水平力F的大小; y x 2. 求物体上升和下滑时的效率。 F [解] (1) 上升时,F为驱动力,G为阻力
ωM
F vF
输入
对理想机械:不存在摩擦 理想驱动力:F0<F 理想机械的效率:
η0 =
GvG =1 F0v F
摩擦和机械效率课件资料

机械原理课程讲稿
机械设计基础 课程讲稿
滑块等速向右
铅垂载荷
法向反力水平力摩擦力,方
向与v 12反。
总反力
φ
摩擦角
Q
N -=21库仑定律)(大小2121fN F =滑块1的总反力
21
2121F N R +=f N fN N F ===
21
21
2121φtan f
arctan =φ1、总反力R 21的方向恒与相对运动速度v 12方向成一钝角(90°+φ),与N 21成φ。
2、当移动副的几何形状改变时,会改变N 21的大小,产生较平面摩擦较大的F f 。
楔形滑块
楔槽
V
f Q fQ ⋅=θ
sin 当量摩擦系数
θ
sin f f V =
对应的当量摩擦角
V
V f arctan =φ)无论移动副形状如何,都可看作平面摩擦引入不同的常用楔槽面增大摩擦力,如V 带传动、三角形螺纹联接等。
)滑块沿斜面等速上升(正行程)所受的总反力。
P’
,保持匀速状态的
其接触面是螺旋面。
斜面摩擦
楔形滑块沿斜槽面的运动。
下侧螺纹
面接触,
型承载
1.径向轴颈的摩擦
由滚动
到原地
滑动
等值反向。
e>ρ
轴颈将加速运动
用一偏距为e 的载荷Q 代替原载
荷及驱动力矩Md ,则e<ρ(相割)轴颈将减速运动,若加载前原为静止,则保持静止状态
e= ρ
轴颈将保持等速运动或原静止状态。
R 32
R 12
ω21
ω23
二力杆(受拉)
轴端(轴
踵)。
机械中的摩擦机械效率和自锁.pptx
因为:
则:
摩擦力矩: 当量摩擦系数:
由前面的知识知:
力偶臂为:
摩擦园:以力偶臂为半径 的圆。 摩擦园半径:力偶臂ρ 在对机构进行受力分析时,需要确定转动副中的总反力, 总反力的方位可根据如下三点确定:
① 在不考虑摩擦力的情况下,根据力的平衡条件,确定不计摩擦力时的 总反力的方向; ② 考虑摩擦时,总反力应与摩擦圆相切; ③ 轴承B对轴颈A的总反力对轴颈中心之矩的方向必与轴颈A相对于轴承B 的相对角速度的方向相反。
轴端中心处的压强非常大,极易压溃,故对于载荷较大 的通常作成空心的
▪ 移动副中总反力的方向确定: ① 总反力与法向反力偏斜一摩擦角或当量摩擦角;
② 总反力与法向反力偏斜的方向与构件1相对于构 件2的相对速度方向相反。
注意:
1 移动副中的总反力与法向反力偏斜的角度始终为 摩擦角或当量摩擦角吗?
2 槽面接触的摩擦力大于平面接触的摩擦力,是因 为槽面接触的摩擦系数大吗?
3 影响当量摩擦系数的因素有哪些?
5.2考虑摩擦时机构的受力分析
例5-1 如图所示的铰链四杆机构,曲柄1为主动件,
在力矩 M1的作用下沿1 方向回转,试求转动副B、
C中总反力的方位。图中虚线小圆为摩擦圆,解 题时不考虑构件的自重及惯性力。
例5-2 如图所示的四杆机构,曲柄1为主动件,在力
矩 M1的作用下沿1 方向回转,试求各运动副中的
M Fr0 Qr0 tan( v )
防松力矩:
M F r0 Qr0 tan( v )
5.1.3 转动副中的摩擦
转动副按载荷作用情况不同分为两种。 1)轴颈摩擦:当载荷垂直于轴的径向的转动副摩擦 2)轴端摩擦:当载荷平行于轴的几何轴线的转动副摩擦
机械设计原理--机械的效率PPT课件( 22页)

•
16、人生在世:可以缺钱,但不能缺德;可以失言,但不能失信;可以倒下,但不能跪下;可以求名,但不能盗名;可以低落,但不能堕落;可以放松,但不能放纵;可以虚荣,
但不能虚伪;可以平凡,但不能平庸;可以浪漫,但不能浪荡;可以生气,但不能生事。
•
17、人生没有笔直路,当你感到迷茫、失落时,找几部这种充满正能量的电影,坐下来静静欣赏,去发现生命中真正重要的东西。
之比。
12.2.2 机械系统的机械效率
1.串联
系统的总效率:
P P d kP P d 1P P 1 2P P 2 3P P kk 11 2 3 k
结论:串联系统的总效率等于各机器的效率的连乘积。串 联的级数越多,机械系统的效率越低。
12.2.2 机械系统的机械效率
机械稳定运转时: Wd Wr Wf
机械效率:
Wr Wd
12.2.1 机械效率的表达形式
1.效率以功或功率的形式表达
Pr 1 Pf
Pd
Pd
2.效率以力或力矩的形式表达
1)克服同样生产的阻力Q
以力的形式表达
QQ v F0vF F0
FvF FvF F
以力矩的形式表达
M F0 MF
•
6、无论你正遭遇着什么,你都要从落魄中站起来重振旗鼓,要继续保持热忱,要继续保持微笑,就像从未受伤过一样。
•
7、生命的美丽,永远展现在她的进取之中;就像大树的美丽,是展现在它负势向上高耸入云的蓬勃生机中;像雄鹰的美丽,是展现在它搏风击雨如苍天之魂的翱翔中;像江
河的美丽,是展现在它波涛汹涌一泻千里的奔流中。
12.1.3 转动副中的摩擦
1.径向轴颈的摩擦
2. 止推轴颈的摩擦
摩擦与机械效率.ppt

2. 轴端摩擦 在Q的作用下产生摩擦力矩Mf 取环形面积: ds=2πρdρ 设ds上的压强为p,正压力为:dN=pds, 摩擦力为:dF= fdN = fpds 摩擦力矩:dMf =ρdF =ρf dN =ρfpds 总摩擦力矩:M f
ω Mf 2 dρ 1 Q M
2r 2R ω r
fpds 2f p d r r ρ 2 2 p Q / ( R r ) (1)新轴端, p=常数,则: R 3 3 R 2 (R r ) 2 2 3 3 M f 2f p d = fp( R r ) fQ 2 2 r 3 R r 3
Q N”21 θ N’21 θ θ N’21 N”21 1
非平面接触时 ,摩擦力增大了,为什么? 是 f 增大了? 原因:是由于N21 分布不同而导致的。 应用:当需要增大滑动摩擦力时,可将接触面设计成槽面或柱面。 如圆形皮带(缝纫机)、三角形皮带、螺栓联接中采用的三角形 螺纹。 对于三角带:θ =18° fv=3.24 f θ 2.移动副中总反力的确定 总反力为法向反力与摩擦力的合成: R21=N21+F21 tgφ= F21 / N21 = fN21 / N21 =f θ R21 N21 1 v21 P Q 2
b
从图上量得: Md=Q(cb/ab)×l’ a 解题步骤小结: ①从二力杆入手,初步判断杆2受拉。 ②由γ、β增大或变小来判断各构件的相对角速度。 ③依据总反力判定准则得出R12和R32切于摩擦圆的内公切线。 ④由力偶平衡条件确定构件1的总反力。 ⑤由三力平衡条件(交于一点)得出构件3的总反力。
湘潭工学院专用
φ
F21
φ-摩擦角, 方向:∠R21V12 =(90°+φ)
湘潭工学院专用
机械原理机械中的摩擦机械效率及自锁讲课文档
2f
R
p2d
r
r
第28页,共47页。
二、转动副中摩擦力:
2.轴端摩擦:
(1)新轴端, p=常数,则: pG/(R2r2)
Mf
2f
Rp2d=2fp(R3
r
3
r3)
2 3
fG(R3 R2
r3) r2
(2)跑合轴端
跑合初期: p=常数,外圈V↑→磨损快 → p↓→磨损变慢
内圈V↓→磨损慢 → p↑→磨损变快
v
Fv
αG
l
M=Fd2/2=Gd2tan(α+ψ)/2
πd2
第15页,共47页。
一、移动副中摩擦力的确定:
②反行程(求放松力矩M’):
当螺母顺着G力等速向下运动时,相当于滑块沿斜面等速下滑,于 是可求得必须加在螺纹中径处的圆周力为:
F’=Gtan(α-ψ) 而放松力矩为: M’=F’d2/2=Gd2tan(α-ψ)/2 当α>φ,则M’为正值,螺纹自动松开,其方向与螺母运动方向
第23页,共47页。
二、转动副中摩擦力:
1.轴径摩擦:
例1:如图所示一四杆机构,曲柄1为主动件,在驱动力矩Md的作用下沿
ω1方向转动,试求转动副B、C中作用力方向线的位置.图中小圆为 摩擦圆,解题时不考虑构件自重及惯性力.
B
ωM1d1 A
解:1.确定FR12、FR32 的方向。
C
由构件1的运动方向可知构
Mf
Ff21rFN21 f r
G 1f
2
r
f
Gr
fv
G FR21 Mf
FN21 Ff21
第20页,共47页。
二、转动副中摩擦力:
机械原理——5.摩擦与效率PPT课件

N rB
机械原理第四章
28
机械原理第四章
29
机械原理第四章
30
机械原理第四章
31
写在最后
成功的基础在于好的学习习惯
The foundation of success lies in good habits
32
谢谢大家
荣幸这一路,与你同行
It'S An Honor To Walk With You All The Way
2 0.99
N dB
N rB
1223
B
2.2405kw 1 0.92
电机所需功率
Nd NdA NdB 9.24kw
总机械效率
Nd 1 2
NrA NrB 5 1 0.649
Nd
9.24
2
A 0.8 A NrA
5kw
3 0.99
2
B NrB 1kw
B 0.5
3 2 A NrA
转 动 副
轴颈 轴端
M f rfvQ Q
新轴端 跑合
Mf
2(R3 r3 ) fQ 3(R2 r 2 )
轴端 M f 0.5 fQ(R r)
机械原理第四章
fv f / cos
fv (1,1.27,1.57) f fv f
2
二.考虑摩擦时机构的受力分析
关键是确定运动副中总反力的方向
R12
R32
cos( cos(
2 ) 2 )
R23 sin(900
)
Q
sin(
2 )
R23
Q
cos sin( 2)
P Q tg ( 2 )
机械原理第四章
tg ( 2 )
NO.8 武丽梅主编机械原理课件 第5章 机械中的摩擦及机械的效率

有效功(输出功 output work):机械克服生产阻力所做的功。Wr
损失功(loss work):机械克服有害阻力所做的功。Wf 功:Wd=Wr+Wf 功率:Pd=Pr+Pf 机械效率:输出功和输入功的比值,反映了输入功在机械中有效利用的程度。用 表示。
机械原理
第5章机械中的摩擦与机械效率
5 。 考 虑 摩 擦 的 转 动 副, 不 论 轴 颈 在 加 速、 等 速、 减 速 不 同 状 态 下 运 转, 其 总 反 力 的 作 用 线 切 于 摩 擦 圆。 A) 都 不 可 能;B) 不 全 是;C) 一 定 都。 6。在 车 床 刀 架 驱 动 机 构 中, 丝 杠 的 转 动 使 与 刀 架 固 联 的 螺 母 作 移 动, 则 丝 杠 与 螺 母 之 间 的 摩 擦 力 矩 属 于 。 A)驱 动 力;B)生 产 阻 力;C)有 害 阻 力;D)惯 性 力。 7 。 风 力 发 电 机 中 的 叶 轮 受 到 流 动 空 气 的 作 用 力, 此 力 在 机 械 中 属 于 。 A) 驱 动 力;B) 生 产 阻 力; C) 有 害 阻 力; D) 惯 性 力。 8。在机械中阻力与 其作用点速度方向 。 A).相 同; B).一定相反; C).成锐角; D).相反或成钝角 。
4。在 由 若 干 机 器 串 联 构 成 的 机 组 中, 若 这 些 机 器 的 单 机 效 率 均 不 相 同, 其 中 最 高 效 率 和 最 低 效 率 分 别 为 max 和 min ,则 机 组 的 总 效 率 必 有 如 下 关 系: 。 A) B) C) D) 同上题 。
沈阳航空航天大学
沈阳航空航天大学
第08章机械中的摩擦与机械效率.pptx
第8章 机械中的摩擦 与机械效率
作者:郭卫东 樊文贵 王家俊
科学出版社高等教育出版中心
第8章 机械中的摩擦与机械效率
1
运动副中的摩擦与自锁
2
机械的机械效率
8.1 运动副中的摩擦与自锁
8.1.1 研究运动副中摩擦的目的和基本力学原理
基本力学原理: 1)摩擦库伦定理:Ff f N 。 2)若一物体只受两个力,则此两力必定共线。 3)若一物体只受三个力,则此三力必定汇交一点。 4)一物体所受的驱动力与其运动方向一致,所受的摩擦与其运动方向相反。
8.1 运动副中的摩擦与自锁
8.1.2 移动副中的摩擦 1)平面摩擦
T分解为两力F和Q:
(a)
(b)
8.1 运动副中的摩擦与自锁
8.1.4 考虑运动副摩擦的机构力分析与摩擦的应用 解:动画(a)中当手柄转到某一角度夹紧工件后撤除,工件给偏
心轮的总反力R21作用与摩擦圆之外,所以机构不自锁。将手柄的转角加 大,再夹紧工件后撤除,工件给偏心轮的总反力R21作用与摩擦圆之内, 所以机构自锁,如动画(b)所示。
T F Q
P —— 沿着滑块速度v12方向的分力 Q —— 垂直滑块速度v12方向的分力
全反力R21 R21 N 21 F f 21
N21 —— 法向反力 Ff21 —— 机架作用于滑块的摩擦力
8.1 运动副中的摩擦与自锁
8.1.2 移动副中的摩擦 1)平面摩擦
摩擦角j :全反力R21 与法向反力N21 之间的夹角。
1)当合成的Q力恰好与全反力R共线 时,轴作等速转动或静止不动。 2)当增大M 时,合成力平移至R 的 右侧,轴作加速运动。 3)当减小M 时,合成力平移至R 的 左侧位置,轴作减速转动或静止不动。
机械中的摩擦和机械效率

驱动力 P Q tg( )
P
P0 Q tg
Q
V12
R21
P R21 + Q
效率 P0 tg P tg( )
滑块沿斜面等速上行,相当于拧紧螺母 (工作行程),不要求自锁。由 >0 得
0
2
当摩擦角不变时,效率是升角的函
Q
V12
P´
R21´
42° P´ –
R21´ Q
2.螺旋机构的效率和自锁
矩形螺纹
正行程
M P d2 d2 Q tg( )
22 P0 tg
P tg( )
反行程
M ' P' d2 d2 Q tg( ) 22
三角形螺纹
数。见右图
由 d 0 d
得 = 45°– /2 时,效率最高
2 ) 滑块沿斜面等速下行
力分析 维持力
P' Q R'21 0
P' Q tg( )
效率
P
' 0
Q tg
P' tg( )
P'0
tg
自锁条件 ' tg( ) 0 tg
Q
N
Q
Md
12
O
R21
1 2
N21
F21
以轴颈中心为圆心,为半径作的圆称为摩擦圆,
为摩擦圆半径。
转动付总反力方位线的确定
Q12
12
Q12
12
Q12
1
2
R21
1
机械中的摩擦和机械效率

F cos f s in
令
fv
f
s in
fv tgv
fv f
自锁条件
槽面接触的摩擦力大于平面接触的摩擦力
若 Ft Ff 静止的滑块仍然静止 自锁
Ft F sin F21 F cos f v
sin tg cos
v
三、转动副的摩擦 (轴颈摩擦)
Q
2
3
R21
P R21
V12
1
2
V12
1
R21(驱动力)
V12
1
N21
二、槽面移动副的摩擦
1
力分析
F21 2N 21 f
2N21 sin F cos
2N 21
F
cos sin
Fn
1 2
N21
N21
F
2 Q
Ft
Q
V12 1
2
Q
F21 2N 21 f
Nd FVF
F — 驱动力
Q — 生产阻力
VF 、 VQ — 分别为 F、 Q作用点沿各自作用线方向的速度
理想机械中( Wf = 0, 0 = 1) 设克服同样的生产阻力Q 所需要的驱动力为F0
由
F0 VF Q VQ
Q VQ Q F0 F0
F VF F Q F
VQ F0 VF Q
代入(P115 a)得 (P115 c)
同理 若设在同样的驱动力 P作用下, 所能克服的理想生产阻力为Q0
Q0 VQ F VF
代入(P115 a)得
Q VQ Q F Q
机械中的摩擦及效率
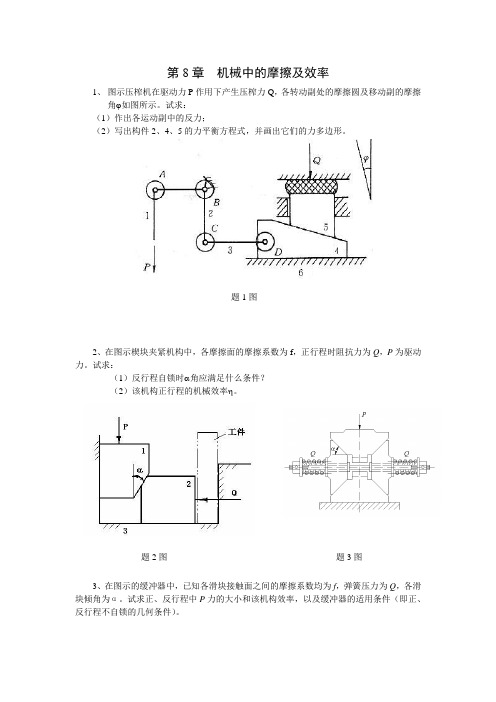
第8章 机械中的摩擦及效率
1、 图示压榨机在驱动力P 作用下产生压榨力Q ,各转动副处的摩擦圆及移动副的摩擦角ϕ如图所示。
试求:
(1)作出各运动副中的反力;
(2)写出构件2、4、5的力平衡方程式,并画出它们的力多边形。
2、在图示楔块夹紧机构中,各摩擦面的摩擦系数为f ,正行程时阻抗力为Q ,P 为驱动力。
试求:
(1)反行程自锁时α角应满足什么条件?
(2)该机构正行程的机械效率η。
3、在图示的缓冲器中,已知各滑块接触面之间的摩擦系数均为f ,弹簧压力为Q ,各滑块倾角为α。
试求正、反行程中P 力的大小和该机构效率,以及缓冲器的适用条件(即正、反行程不自锁的几何条件)。
题1图 题2图 题3图
4、在图示双滑块机构中,滑块1在驱动力P作用下等速运动。
设已知各转动副中轴颈半径r=10mm,当量摩擦系数f v=0.1,移动副中的滑动摩擦系数f=0.176327,l AB=200mm。
各构件的重量略而不计。
当P=500N时,试求所能克服的生产阻力Q以及该机构在此瞬时位置的效率。
题4图
5、图示为由齿轮机构组成的双路传动。
已知两路输出功率相同,锥齿轮传动效率η1=0.97,圆柱齿轮传动效率η2=0.98,轴承摩擦不计,试计算该传动装置的总效率η。
题5图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
α
四边形内角和 = 360
R12 φ
900-α- φ
α+2φ
11.1 机械中的摩擦 11.1.2 螺旋副中的摩擦
螺杆和螺母构成的运动副
螺母:轴向载荷Q,转矩M;
-----滑块受力F牵引沿斜面运动;
1 ) 矩形螺纹螺旋副
将螺纹中径d2圆柱面展开,斜面升角:
tanα=l/πd2=zp/πd2; l—导程;z—螺纹头数;p—螺距;
三角形螺纹的摩擦力矩较矩形螺纹的大,易用于联结;
研究机械中摩擦的主要目的和内容 主要目的----寻找提高机械效率的途径; 主要内容 运动副中的摩擦分析; 低副----滑动摩擦;高副----滑动+滚动摩擦 考虑摩擦时机构的受力分析; 机械效率的计算; 自锁现象及其发生的条件;
11.1 机械中的摩擦 11.1.1 移动副中的摩擦
1) 平面摩擦 滑块与平面构成的移动副,滑块在自重和 驱动力的作用下向右移动; 摩擦力:F21 =f N21
2Q
方向与 v 指向相反;
11.1 机械中的摩擦 11.1.1 移动副中的摩擦
3) 斜面摩擦 等速上升:F = Qtan(α+φ)
φ R21
F
F
1
R21
Q
2
α
α+φ
Q
等速上升
11.1 机械中的摩擦 11.1.1 移动副中的摩擦
3) 斜面摩擦 等速上升:F = Qtan(α+φ) 等速下滑:F’= Qtan(α-φ) 当α>φ,F’为正,阻止滑块1加速下滑;Q为驱动力; 若α<φ,F’为负,图上的F’应反向,成为驱动力; 斜度较小,滑块都不会自动下滑,需要F’推动才能下滑。
螺纹拧紧:
螺母在F和Q的联合作用下,逆Q向上运动;
F=Qtan(α+φ);
拧紧力矩M=Fd2/2=Qtan(α+φ)d2/2
螺纹拧松
矩形螺纹螺旋副中的摩擦
螺母在F和Q的联合作用下,顺Q向下运动;
F’= Qtan(α-φ);
拧紧力矩M’=F’d2/2=Qtan(α-φ)d2/2
11.1 机械中的摩擦p 11.1.2 螺旋副中的摩擦
2 ) 三角形螺纹螺旋副中的摩擦
近似楔形滑块沿斜槽面的运动;
当量摩擦系数:fe=f/cosβ;
β--牙型半角;
三角形螺纹螺旋副与矩形螺纹螺旋副比较
当量摩擦角:φe=arctan fe; 螺纹拧紧:拧紧力矩M=Fd2/2=Qtan(α+φe)d2/2 螺纹拧松:拧紧力矩M’=F’d2/2=Qtan(α-φe)d2/2 螺纹牙形
R23 Q
R32
900-φ F
F/sin(α+2φ) =R32/sin (900-φ)
R23/sin(900+φ) =Q/sin(900-α-2φ)
所以:F/sin(α+2φ) =Q/sin(900-α-2φ) 整理:F=Qcot(α+2φ)
900+φ
R32
2.分别取2和3为脱离体作力多边形 3.用正弦定理列式求解
θ
θ
θ N21/2
Q N21/2
楔形面接触
11.1 机械中的摩擦 11.1.1 移动副中的摩擦
1) 平面摩擦 滑块与平面构成的移动副,滑块在自重和 驱动力的作用下向右移动; 摩擦力:F21 =f N21
2) 槽面摩擦 平面接触:N21=Q; F21 =f N21=f Q; 圆柱面接触:N21=k Q; k ----接触情况系数 ≥1
半圆周均匀接触
N21=p rπ
Q 0 p sid n s 0 psr id n pcro | 0 s 2 pr
N21=k Q;
r
p rπ=k2pr
k =π/2 ;
Q
dsrd
p
圆柱面接触
11.1 机械中的摩擦 11.1.1 移动副中的摩擦
槽面摩擦结论
(1) 引入当量摩擦系数后,移动副中的摩擦力可统一写成:F21=fe Q 平面接触时: fe=f 楔形面接触时:fe=f/sinθ(θ楔形角的一半) 圆柱面接触时:fe=kf
R21 φ 1
2 α
F’ F’
Q R21
α-φ
Q 等速下滑
11.1 机械中的摩擦 11.1.1 移动副中的摩擦
例题:F为驱动力,求图示机构中力Q与F的关系。
Q
R13 3 v31
R23
R32
F
α v21
R12 2 1
解题方法: 1.画出各移动副的总反力
900-α-2φ R13
900+φ
α+2φ
R12
≈ 1 (点、线接触)
k = π/2 (半圆周均匀接触)
=1~π/2(其余情况)
F21 =f N21 = f kQ; fe=fk F21 =feQ
当量摩擦系数: fe
N21 v12 F21 1
F 2Q
Q:铅垂载荷; N21:法向反力; F:水平驱动力;
r
Q
p 圆柱面接触
11.1 机械中的摩擦 11.1.1 移动副中的摩擦
R21 = N21+ F21 摩擦角: 总反力 R 与法向反力 N 之间的夹角,用φ表示
∵ tanφ=F21/N21 =f N21/N21 = f ∴φ=arctan f 当量摩擦角: φe=arctan fe 总反力 R 方向的确定 在接触点处与公法线呈φ角;
N21 φ
R21
v12
1
F21
2) 槽面摩擦 平面接触:N21=Q; F21 =f N21=f Q;
楔形面接触: 2(N21/2)sinθ=Q;
N21=Q/sinθ; F21 =f N21=f Q/sinθ;
当量摩擦系数: fe
fe=f/sinθ
F21 =feQ
N21 v12 F21 1
F 2Q
Q:铅垂载荷; N21:法向反力; F:水平驱动力;
第11章 机械的摩擦与效率
11.1 机械中的摩擦 11.2 机械效率和自锁 11.3 提高机械效率的途1 机械中的摩擦
摩擦的缺点 效率↓;磨损→强度↓→精度↓ →寿命↓; 发热→润滑恶化→卡死;
摩擦的优点 利用摩擦完成有用的工作;如: 摩擦传动(皮带、摩擦轮)、摩擦离合器、制动器;
(2) 相同的外载荷,槽面接触比平面接触的摩擦力大; 当需增大滑动摩擦力时,可将接触面设计成楔形面或圆柱面;
如圆形皮带(缝纫机)、三角带、螺栓联接中采用的三角螺纹; 对三角带:θ=18°, fe=3.24f
11.1 机械中的摩擦 11.1.1 移动副中的摩擦
3) 斜面摩擦 总反力:运动副中法向反力和摩擦力的合力,用R表示;