PROE运动仿真教程
ProE 运动仿真参考文档
连接轴设置
图 形 显 示
13
6. 实例演练
三、建立运动模型
牛头刨床主运动机构 附件1,2
插齿机主运动机构 14
四、运动副
1. 凸轮
直接点击按钮 或下拉式菜单“Mechanism”→ 凸轮, 可从弹出的对话框中对凸轮机构进行新建、编辑、删除 的操作,大部分Mechainsm所创建的对象都使用此种方 式予以管理)。
⑧ 轴承
点对齐
具有3个旋转自由度和一个平移自由
度,相当于“球”连接的基础上再加一
个平移自由度,使用“点与轴线对齐”
来限制其他两个自由度。
8
三、建立运动模型
1. 运动连接
连接类型
刚性(Rigid) 销钉(Pin) 滑动杆(Slider) 圆柱(Cylinder) 平面(Plannar) 球(Ball) 焊接(Weld) 轴承(Bearing)
5
三、建立运动模型
1. 运动连接
① 刚性 6个自由度被完全限制。
② 销钉 仅有一个旋转自由度,使用“轴对齐”和 “平移”两个约束来限制其他5个自由度 。
③ 滑动杆 仅有一个沿轴向的平移自由度,使用“轴对 齐”和“旋转”两个约束限制其他5个自由度。
轴对齐 平移
旋转
轴对齐
6
三、建立运动模型
1. 运动连接
通过点击下拉式菜单“Mechanism”→ 质量属性, 对质量属性进行设置,或直接按下快捷按钮 。
“定义属性”有三个选项:“缺省”、“密度” 和“质量属性”。一般只需要对“密度”进行设置即 可;如果不指定相关设置,系统则会指派“缺省”的 设置。
PROE运动仿真分析

PROE运动仿真分析PROE(Pro/ENGINEER)是由美国Parametric TechnologyCorporation(PTC)公司所开发的一套3D CAD软件系统。
它是一款功能强大的工程设计与制造软件,广泛应用于机械工程、汽车工程等领域。
在PROE中进行运动仿真分析可以帮助工程师们更好地了解和优化他们的设计方案。
运动仿真分析是一种通过模拟机械系统在给定条件下的运动来评估其性能和运行情况的方法。
通过对设备或产品的运动进行分析与仿真,可以预测其运动特性、动力学行为和相应的应力应变等情况。
这对于设计师来说非常重要,因为它可以在实际制造之前发现问题并进行相应的调整,从而节省时间和成本。
在PROE中进行运动仿真分析有几个基本步骤。
首先,我们需要创建一个装配模型,也就是包含了所有相关零部件的模型。
然后,我们需要为每个零件定义其运动关系和约束条件。
这些条件可以是固定的,也可以是变化的。
接下来,我们需要选择适当的运动学分析工具,例如正向动力学和逆向动力学。
运动学分析允许我们确定系统的运动规律和轨迹。
最后,我们需要对系统的受力和应力进行分析,以确定零件的强度和稳定性。
PROE中的运动仿真分析可以帮助工程师在设计过程中解决各种问题。
以下是一些典型的应用案例:1.碰撞检测:PROE可以模拟装配过程中各个零部件之间的碰撞情况。
这可以帮助设计师排除可能导致装配错误或故障的问题。
2.动力学分析:通过对装配模型进行运动仿真分析,可以确定各个零部件的运动规律和速度变化。
这对于设计运动机构和机械设备非常重要。
3.振动分析:PROE可以帮助评估系统的振动特性,包括自由振动频率和振幅。
这对于减少振动和噪音问题非常有用。
4.受力和应力分析:工程师可以使用PROE进行受力和应力分析,以确定系统中可能存在的弱点和潜在的破坏部位。
这对于优化设计方案和提高产品强度至关重要。
5.运动优化:PROE可以帮助工程师优化机械系统的运动性能,例如减少摩擦、优化速度和精度等。
PROE运动仿真教程

PROE机构仿真之活动剖析症结词:PROE 仿真活动剖析反复组件剖析衔接回放活动包络轨迹曲线术语创建机构前,应熟习下列术语在PROE中的界说:主体 (Body) 一个元件或彼此无相对活动的一组元件,主体内DOF=0.衔接 (Connections) 界说并束缚相对活动的主体之间的关系.自由度 (Degrees of Freedom) 许可的机械体系活动.衔接的感化是束缚主体之间的相对活动,削减体系可能的总自由度.拖动 (Dragging) 在屏幕上用鼠标拾取并移念头构.动态 (Dynamics) 研讨机构在受力后的活动.履行电念头 (Force Motor) 感化于扭转轴或平移轴上(引起活动)的力.齿轮副衔接 (Gear Pair Connection) 运用到两衔接轴的速度束缚.基本 (Ground) 不移动的主体.其它主体相对于基本活动.接头 (Joints) 特定的衔接类型(例如销钉接头.滑块接头和球接头).活动 (Kinematics) 研讨机构的活动,而不斟酌移念头构所需的力.环衔接 (Loop Connection) 添加到活动环中的最后一个衔接.活动 (Motion) 主体受电念头或负荷感化时的移动方法.放置束缚 (Placement Constraint) 组件中放置元件并限制该元件在组件中活动的图元.回放 (Playback) 记载着重放剖析运行的成果.伺服电念头 (Servo Motor) 界说一个主体相对于另一个主体活动的方法.可在接头或几何图元上放置电念头,并可指定主体间的地位.速度或加快度活动.LCS 与主体相干的局部坐标系.LCS 是与主体中界说的第一个零件相干的缺省坐标系.UCS 用户坐标系.WCS 全局坐标系.组件的全局坐标系,它包含用于组件及该组件内所有主体的全局坐标系.活动剖析的界说在知足伺服电念头轮廓和接头衔接.凸轮从念头构.槽从念头构或齿轮副衔接的请求的情形下,模仿机构的活动.活动剖析不斟酌受力,它模仿除质量和力之外的活动的所有方面.是以,活动剖析不克不及运用履行电念头,也不必为机构指定质量属性.活动剖析疏忽模子中的所有动态图元,如弹簧.阻尼器.重力.力/力矩以及履行电念头等,所有动态图元都不影响活动剖析成果.假如伺服电念头具有不持续轮廓,在运交活动剖析前软件会测验测验使其轮廓持续,假如不克不及使其轮廓持续,则此伺服电机将不克不及用于剖析.运用活动剖析可获得以下信息:几何图元和衔接的地位.速度以及加快度元件间的干预机构活动的轨迹曲线作为 Pro/ENGINEER 零件捕获机构活动的活动包络反复组件剖析WF2.0以前版本里的“活动剖析”,在WF2.0里被称为“反复组件剖析”.它与活动剖析相似,所有实用于活动剖析的请求及设定,都可用于反复组件剖析,所有不适于活动剖析的身分,也都不实用于反复组件剖析.反复组件剖析的输出成果比活动剖析少,不克不及剖析速度.加快度,不克不及做机构的活动包络.运用反复组件剖析可获得以下信息:几何图元和衔接的地位元件间的干预机构活动的轨迹曲线活动剖析工作流程创建模子:界说主体,生成衔接,界说衔接轴设置,生成特别衔接检讨模子:拖动组件,磨练所界说的衔接是否能产生预期的活动参加活动剖析图元:设定伺服电机预备剖析:界说初始地位及其快照,创建测量剖析模子:界说活动剖析,运行成果获得:成果回放,干预检讨,检讨测量成果,创建轨迹曲线,创建活动包络装入元件时的两种方法:接头衔接与束缚衔接向组件中增长元件时,会弹出“元件放置”窗口,此窗口有三个页面:“放置”.“移动”.“衔接”.传统的装配元件办法是在“放置”页面给元件参加各类固定束缚,将元件的自由度削减到0,因元件的地位被完全固定,如许装配的元件不克不及用于活动剖析(基体除外).另一种装配元件的办法是在“衔接”页面给元件参加各类组合束缚,如“销钉”.“圆柱”.“刚体”.“球”.“6DOF”等等,运用这些组合束缚装配的元件,因自由度没有完全清除(刚体.焊接.通例除外),元件可以自由移动或扭转,如许装配的元件可用于活动剖析.传统装配法可称为“束缚衔接”,后一种装配法可称为“接头衔接”.束缚衔接与接头衔接的雷同点:都运用PROE的束缚来放置元件,组件与子组件的关系雷同.束缚衔接与接头衔接的不合点:束缚衔接运用一个或多个单束缚来完全清除元件的自由度,接头衔接运用一个或多个组合束缚来束缚元件的地位.束缚衔接装配的目标是清除所有自由度,元件被完全定位,接头衔接装配的目标是获得特定的活动,元件平日还具有一个或多个自由度.“元件放置”窗口:(yd1)接头衔接的类型接头衔接所用的束缚都是能实现特定活动(含固定)的组合束缚,包含:销钉.圆柱.滑动杆.轴承.平面.球.6DOF.通例.刚性.焊接,共10种.销钉:由一个轴对齐束缚和一个与轴垂直的平移束缚构成.元件可以绕轴扭转,具有1个扭转自由度,总自由度为1.轴对齐束缚可选择直边或轴线或圆柱面,可反向;平移束缚可所以两个点对齐,也可所以两个平面的对齐/配对,平面临齐/配对时,可以设置偏移量.圆柱:由一个轴对齐束缚构成.比销钉束缚少了一个平移束缚,是以元件可绕轴扭转同时可沿轴向平移,具有1个扭转自由度和1个平移自由度,总自由度为2.轴对齐束缚可选择直边或轴线或圆柱面,可反向.滑动杆:即滑块,由一个轴对齐束缚和一个扭转束缚(现实上就是一个与轴平行的平移束缚)构成.元件可滑轴平移,具有1个平移自由度,总自由度为1.轴对齐束缚可选择直边或轴线或圆柱面,可反向.扭转束缚选择两个平面,偏移量依据元件所处地位主动盘算,可反向.轴承:由一个点对齐束缚构成.它与机械上的“轴承”不合,它是元件(或组件)上的一个点对齐到组件(或元件)上的一条直边或轴线上,是以元件可沿轴线平移并随意率性偏向扭转,具有1个平移自由度和3个扭转自由度,总自由度为4.平面:由一个平面束缚构成,也就是肯定了元件上某平面与组件上某平面之间的距离(或重合).元件可绕垂直于平面的轴扭转并在平行于平面的两个偏向上平移,具有1个扭转自由度和2个平移自由度,总自由度为3.可指定偏移量,可反向.球:由一个点对齐束缚构成.元件上的一个点对齐到组件上的一个点,比轴承衔接小了一个平移自由度,可以绕着对齐点随意率性扭转,具有3个入扭转自由度,总自由度为3.6DOF:即6自由度,也就是对元件不作任何束缚,仅用一个元件坐标系和一个组件坐标系重合来使元件与组件产生联系关系.元件可随意率性扭转和平移,具有3个扭转自由度和3个平移自由度,总自由度为6.刚性:运用一个或多个根本束缚,将元件与组件衔接到一路.衔接后,元件与组件成为一个主体,互相之间不再有自由度,假如刚性衔接没有将自由度完全清除,则元件将在当前地位被“粘”在组件上.假如将一个子组件与组件用刚性衔接,子组件内各零件也将一路被“粘”住,其原有自由度不起感化.总自由度为0.焊接:两个坐标系对齐,元件自由度被完全清除.衔接后,元件与组件成为一个主体,互相之间不再有自由度.假如将一个子组件与组件用焊接衔接,子组件内各零件将参照组件坐标系发按其原有自由度的感化.总自由度为0.接头衔接类型:(yd2)接头衔接束缚:通例通例:也就是自界说组合束缚,可依据须要指定一个或多个根本束缚来形成一个新的组合束缚,其自由度的若干因所用的根本束缚种类及数目不合而不合.可用的根本束缚有:匹配.对齐.拔出.坐标系.线上点.曲面上的点.曲面上的边,共7种.在界说的时刻,可依据须要选择一种,也可先不拔取类型,直接拔取要运用的对象,此时在类型那边开端显示为“主动”,然后依据所选择的对象体系主动肯定一个适合的根本束缚类型.通例—匹配/对齐:对齐).单一的“匹配/对齐”构成的自界说组合束缚转换为束缚衔接后,变成只有一个“匹配/对齐”束缚的不完全束缚,再转换为接头束缚后变成“平面”衔接.这两个束缚用来肯定两个平面的相对地位,可设定偏距值,也可反向.界说完后,在不修正对象的情形下可更改类型(匹配通例—拔出:拔取对象为两个柱面.单一的“拔出”构成的自界说组合束缚转换为束缚衔接后,变成只有一个“拔出”束缚的不完全束缚,再转换为接头束缚后变成“圆柱”衔接.通例—坐标系:拔取对象为两个坐标系,与6DOF的坐标系束缚不合,此坐标系将元件完全定位,清除了所有自由度.单一的“坐标系”构成的自界说组合束缚转换为束缚衔接后,变成只有一个“坐标系”束缚的完全束缚,再转换为接头束缚后变成“焊接”衔接.通例—线上点:拔取对象为一个点和一条直线或轴线.与“轴承”等效.单一的“线上点”构成的自界说组合束缚转换为束缚衔接后,变成只有一个“线上点”束缚的不完全束缚,再转换为接头束缚后变成“轴承”衔接.通例—曲面上的点:拔取对象为一个平面和一个点.单一的“曲面上的点”构成的自界说组合束缚转换为束缚衔接后,变成只有一个“曲面上的点”束缚的不完全束缚,再转换为接头束缚后仍为单一的“曲面上的点”构成的自界说组合束缚.通例—曲面上的边:拔取对象为一个平面/柱面和一条直边.单一的“曲面上的点”构成的自界说组合束缚不克不及转换为束缚衔接.自由度与冗余束缚自由度(DOF)是描写或肯定一个体系(主体)的活动或状况(如地位)所必须的自力参变量(或坐标数).一个不受任何束缚的自由主体,在空间活动时,具有6个自力活动参数(自由度),即沿XYZ三个轴的自力移动和绕XYZ三个轴的自力迁移转变,在平面活动时,则只具有3个自力活动参数(自由度),即沿XYZ三个轴的自力移动.主体受到束缚后,某些自力活动参数不再消失,相对应的,这些自由度也就被清除.当6个自由度都被清除后,主体就被完全定位并且不成能再产生任何活动.如运用销钉衔接后,主体沿XYZ三个轴的平移活动被限制,这三个平移自由度被清除,主体只能绕指定轴(如X轴)扭转,不克不及绕另两个轴(YZ轴)扭转,绕这两个轴扭转的自由度被清除,成果只留下一个扭转自由度.冗余束缚指过多的束缚.在空间里,要完全束缚住一个主体,须要将三个自力移动和三个自力迁移转变分离束缚住,假如把一个主体的这六个自由度都束缚住了,再另加一个束缚去限制它沿X轴的平移,这个束缚就是冗余束缚.合理的冗余束缚可用来分摊主体各部分受到的力,使主体受力平均或削减磨擦.抵偿误差,延长装备运用寿命.冗余束缚对主体的力状况产生影响,对主体的对活动没有影响.因活动剖析只剖析主体的活动状况,不剖析主体的力状况,在活动剖析时,可不斟酌冗余束缚的感化,而在涉及力状况的剖析里,必须要恰当的处理好冗余束缚,以得到精确的剖析成果.体系在每次运行剖析时,都邑对自由度进行盘算.并可创建一个测量来盘算机构有若干自由度.若干冗余.PROE的帮忙里有一个门搭钮的例子来讲冗余与自由度的盘算,但其剖析实丰有欠妥善,列位想精确盘算模子的自由度的话,请找机构设计方面的书来细心研讨一番.这也不是几句话能解释确的,我这里只提一下就是了,不再详.束缚转换接头衔接与束缚衔接可互相转换.在“元件放置”窗口的“放置”页面和“衔接”页面里,在束缚列表下方,都有一个“束缚转换”按钮.运用此按钮可在任何时刻依据须要将接头衔接转换为束缚衔接,或将束缚衔接转换为接头衔接.在转换时,体系依据现有束缚及其对象的性质主动拔取最相配的新类型.如对体系主动拔取的成果不知足,可再进行编辑.转换的规矩,可参考PROE的自带帮忙.不过,没有很好的空间想像力和耐性的兄弟就不必看了.须要记住的一个:曲线上的点.曲面上的点.相切束缚,在转换时是不会转换成通例衔接的.下图显示“束缚转换”和“反向”按钮:(yd3)基本与重界说主体基本是在活动剖析中被设定为不介入活动的主体.创建新组件时,装配(或创建)的第一个元件主动成为基本.元件运用束缚衔接(“元件放置”窗口中“放置”页面)与基本产生关系,则此元件也成为基本的一部分.假如机构不克不及以预期的方法移动,或者因两个零件在统一主体中而不克不及创建衔接,就可以运用“重界说主体”来确认主体之间的束缚关系及删除某些束缚.进入“机构”模块后,“编辑”—>“重界说主体”进入主体重界说窗口,选定一个主体,将在窗口里显示这个主体所受到的束缚(仅束缚衔接及“刚体”接头所用的束缚).可以选定一个束缚,将其删除.假如删除所有束缚,元件将被封装.“重界说主体”窗口:(yd4)特别衔接:凸轮衔接凸轮衔接,就是用凸轮的轮廓去掌握从动件的活动纪律.PROE里的凸轮衔接,运用的是平面凸轮.但为了形象,创建凸轮后,都邑让凸轮显示出必定的厚度(深度).凸轮衔接只须要指定两个主体上的各一个(或一组)曲面或曲线就可以了.界说窗口里的“凸轮1”“凸轮2”分离是两个主体中任何一个,并不是从动件就是“凸轮2”.假如选择曲面,可将“主动拔取”复选框勾上,如许,体系将主动把与所选曲面的邻接曲面选中,假如不必“主动拔取”,须要选多个相邻面时要按住Ctrl.假如选择曲线/边,“主动拔取”是无效的.假如所选边是直边或基准曲线,则还要指定工作平面(即所界说的二维平面凸轮在哪一个平面上).凸轮一般是从动件沿凸轮件的概况活动,在PROE里界说凸轮时,还要肯定活动的现实接触面.拔取了曲面或曲线后,将会出线一个箭头,这个箭头指导出所选曲面或曲线的法向,箭头指向哪侧,也就是活动时接触点将在哪侧.假如体系指导出的偏向与想界说的偏向不合,可反向.关于“启用升离”,打开这个选项,凸轮运转时,从动件可分开主动件,不运用此选项时,从动件始终与主动件接触.启用升离后才干界说“恢复系数”,即“启用升离”复选框下方的谁人“e”.因为是二维凸轮,只要肯定了凸轮轮廓和工作平面,这个凸轮的外形与地位也就算界说完全了.为了形象,体系会给这个二维凸轮显示出一个厚度(即深度).平日我们可不必去修正它,运用“主动”就可以了.也可自已界说这个显示深度,但对剖析成果没有影响.须要留意:A.所选曲面只能是单向曲折曲面(如拉伸曲面),不克不及是多向曲折曲面(如扭转出来的鼓形曲面).B.所选曲面或曲线中,可以有平面和直边,但应防止在两个主体上同时消失.C.体系不会主动处理曲面(曲线)中的尖角/拐点/不持续,假如消失如许的问题,应在界说凸轮前恰当处理.凸轮可界说“升离”.“恢复系数”与“磨擦”.凸轮界说窗口:(yd5)特别衔接:齿轮衔接齿轮衔接用来掌握两个扭转轴之间的速度关系.在PROE中齿轮衔接分为尺度齿轮和齿轮齿条两种类型.尺度齿轮需界说两个齿轮,齿轮齿条需界说一个小齿轮和一个齿条.一个齿轮(或齿条)由两个主体和这两个主体之间的一个扭转轴构成.是以,在界说齿轮前,需先界说含有扭转轴的接头衔接(如销钉).界说齿轮时,只需选定由接头衔接界说出来的与齿轮本体相干的谁人扭转轴即可,体系主动将产生这根轴的两个主体设定为“齿轮”(或“小齿轮”.“齿条”)和“托架”,“托架”一般就是用来装配齿轮的主体,它一般是静止的,假如体系选反了,可用“反向”按钮将齿轮与托架主体交流.“齿轮2”或“齿条”所用轴的扭转偏向是可以变动的,点界说窗口里“齿轮2”轴右侧的反向按钮就可以,点中后画面会消失一个很粗的箭头指导此轴扭转的正向.速比界说:在“齿轮副界说”窗口的“齿轮1”.“齿轮2”.“小齿轮”页面里,都有一个输入节圆直径的地方,可以在界说齿轮时将齿轮的现实节圆直径输入到这里.在“属性”页面里,“齿轮比”(“齿条比”)有两种选择,一是“节圆直径”,一是“用户界说的”.选择“节圆直径”时,D1.D2由体系主动依据前两个页面里的数值盘算出来,不成修正.选择“用户界说的”时,D1.D2须要输入,此情形下,齿轮速度比由此处输入的D1.D2肯定,前两个页面里输入的节圆直径不起感化.速度比为节圆直径比的倒数,即:齿轮1速度/齿轮2速度=齿轮2节圆直径/齿轮1节圆直径=D2/D1.齿条比为齿轮转一周时齿条平移的距离,齿条比选择“节圆直径”时,其数值由体系依据小齿轮的节圆数值盘算出来,不成修正,选择“用户界说的”时,其数值须要输入,此情形下,小齿轮界说页面里输入的节圆直径不起感化.图标地位:界说齿轮后,每一个齿轮都有一个图标,以显示这里界说了一个齿轮,一条虚线把两个图标的中间连起来.默认情形下,齿轮图标在所选衔接轴的零点,图标地位也可自界说,点选一个点,图标将平移到谁人点地点平面上.图标的地位只是一视觉后果,不会对剖析产生影响.要留意的事项:A.PROE里的齿轮衔接,只须要指定一个扭转轴和节圆参数就可以了.是以,齿轮的具体外形可以不必做出来,即使是两个圆柱,也可以在它们之间界说一个齿轮衔接.B.两个齿轮应运用公共的托架主体,假如没有公共的托架主体,剖析时体系将创建一个不成见的内部主体作为公共托架主体,此主体的质量等于最小主体质量的千分之一.并且在运行与力相干的剖析(动态.力均衡.静态)时,会提醒指出没有公共托架主体.齿轮界说窗口:(yd6)特别衔接:槽衔接槽衔接是两个主体之间的一个点曲线衔接.从动件上的一个点,始终在主动件上主体之间是否干预,点和曲线甚至可所以零件实体以外的基准点和基准曲线,当然也可以在实体内部.曲线可所以任何一组相邻曲线(即请求相连,不必相切),可所以基准曲线,也可所以实体/曲面的边,可所以凋谢的,也可所以关闭的.点可所以任何一个基准点或极点,但只能是零件中的,组件中的点不克不及用于槽衔接.活动时,从动件上的点始终在主动件上的指定曲线上,假如曲线是一条(组)凋谢曲线,则此曲线(曲线组)的首末两个端点为槽的默认端点,假如是一条(组)关闭曲线,则默认无故点.假如愿望活动区间不是在整条曲线(曲线组)上,而只是在个中的一段上,则须要自界说槽的端点.对于凋谢曲线(曲线组),只要指定新的端点就可以了,对于关闭曲线,指定两个新端点后,体系主动拔取被两头点朋分出的两段曲线中的一段为运行区间,假如不是所须要的,点“反向”拔取另一段.界说槽端点可拔取基准点.极点.曲线/边/曲面,假如选的曲直线/边/曲面,则槽端点为槽曲线与所选曲线/边/曲面的交点.槽衔接可界说“恢复系数”与“磨擦”.槽衔接界说窗口:(yd7)拖动与快照拖动,是在许可的规模内移念头械.快照,对机械的某一特别状况的记载.可以运用拖动调剂机构中各零件的具体地位,初步检讨机构的装配与活动情形,并可将其保管为快照,快照可用于后续的剖析界说中,也可用于绘制工程图.“机构”“拖动”,进入“拖动”窗口,此窗口具有一个对象栏,对象栏左第一个按钮为“保管快照”,即将当前屏幕上的状况保管为一个快照,左第二个按钮为“点拖动”,即点取机构上的一个点,移动鼠标以转变元件的地位,左第三个按钮“裁撤”和“恢复”,每一次拖动,体系都邑记载入内存,运用此两按钮,可检讨已做的各次拖动的成果.“快照”页和“束缚”页,分离有一个列表,显示当前已经界说的快照和为当前拖动界说的暂时束缚.快照列表左侧有一列对象按钮,第一个为显示当前快照,即将屏幕显示刷新为选定快照的内容;第二个为从其它快照中把某些元件的地位提取入选定快照;第三个为刷新选定快照,即将选定快照的内容更新为屏幕上的状况;第四个为画图可用,使选定快照可被当做分化状况运用,从而在画图中运用,这是一个开关型按钮,当快照可用于画图时,列表中的快照名前会有一个图标;第五个是删除选定快照.束缚列表显示已为当前拖动所界说的暂时束缚,这些暂时束缚只用于当前拖动操纵,以进一步限制拖动时各主体之间的相对活动.“高等拖动选项”供给了一组对象,用于精确限制拖动时被拖动点或主体的活动.拖动窗口:(yd8)恢复系数与磨擦即碰撞系数,其物理界说为两物体碰撞后的相对速度(V2V1)与碰撞前的相对速度(V10V20)的比值,即e=(V2V1)/(V10V20),它的值介于0到1之间.典范的恢复系数可从工程书本或现实经验中得到.恢复系数取决于材料属性.主体几何故及碰撞速度等身分.在机构中运用恢复系数,是在刚体盘算中模仿非刚性属性的一种办法.完全弹性碰撞的恢复系数为 1.完全非弹性碰撞的恢复系数为 0.橡皮球的恢复系数相对较高.而湿土壤块的恢复系数值异常接近0.摩擦阻碍凸轮或槽的活动.摩擦系数取决于接触材料的类型以及实验前提.可在物理或工程书本中查找各类典范的摩擦系数表.须要分离指定静磨擦系数和动磨擦系数,且静磨擦系数应大于动磨擦系数.要在力均衡剖析中盘算凸轮滑动测量,必须指定凸轮衔接的磨擦系数.衔接轴设置“机构”—“衔接轴设置”,可为由接头衔接(如销钉)产生的衔接轴界说一些具体的属性,包含:衔接轴的地位,衔接轴的零参照,衔接轴的再生地位(用于反复组件剖析),衔接轴的活动限制.恢复系数及磨擦.进入此窗口后,需先拔取一衔接轴,然后再对此轴进行各类设置.“衔接轴地位”,这里显示的是衔接轴的两个零参照间的地位或距离,未转变时,显示的是当前屏幕上这个地位时的值.假如本身输入一个数值并回车(对于扭转轴,此数值为180到180,如超出此规模或超出“属性”里设置的限制规模,体系将主动转换成可接收的规模内的值),屏幕上的组件也将暂时转变地位以反应当前修正,假如按了“生成零点”,则将当前地位设定为衔接轴零点,其它测量都从此零点地位开端.点了“生成零点”后,“指定参照”将无效.假如选了“指定参照”,则“生成零点”无效.“指定参照”可为衔接轴的两个主体分离选定零地位的几何参照.拔取“再生值”,可让组件在非衔接轴零点地位再生,这个用于反复组件剖析中.“启用限制”,设置接头活动时的最大最小活动规模及恢复系数.对于扭转轴,“最小”值为180到180之间且小于最大值,“最大”值为180到180之间且大于最小值.恢复系数用来模仿当衔接轴活动到限制地位时的冲击力.“启用磨擦”,设置接头的两个主体之间互相活动的阻力.需指定静磨擦系数和动磨擦系数,对于扭转轴,还应指定一个大于零的接触半径值,它用于界说磨擦扭矩感化于衔接轴上的半径.静磨擦系数应大于动磨擦系数.在任何衔接轴上,都不克不及创建多个衔接轴零点.不克不及为球接头界说衔接轴设置.别的,不克不及编辑属于多扭转 DOF 接头(如 6DOF 或某个一般衔接)的扭转衔接轴的衔接轴设置.。
ProE丝杠螺杆螺母的运动仿真教程

第一步当然是建模咯,这个我就不说了
第二步新建组件,创建一根轴,这根轴是用来给螺杆做销钉定义用的
第三步插入螺杆元件,用销钉~~~怎么定义应该知道吧,轴对齐,面对齐,不知道的先学装配的基础教程
第四步插入螺母元件,先用圆柱连接,使两个元件同轴
定义好之后别急着打钩~~~按左下角的新设置
第五步新设置一个槽连接(槽连接就是点在线上运动~~),这个是最关键的,先选螺杆上的一条螺纹边
一定要是同一条线~~~~螺纹线会分成很多段,按ctrl把整条线都选上,建议选内螺纹,好选
选好线后选点,这个点毫无疑问在螺母上,可以选螺母的内螺纹的一个定点,一定要是和在螺杆上的那条螺纹线匹配的那条!!!
意思就是这一点是在刚才选的螺纹线上运动的
这个定义好之后槽连接就定义好了,别急着打钩,还有呢
第六步因为现在的螺母还会旋转
所以我们再定义一个平面连接,使它不会转动,选择面的时候要注意,不要选到螺杆的平面,到时候螺母随螺杆一起旋转了
现在终于可以打钩了~~~到此,装配就完成了
接下来就是仿真了
第七步在应用程序里选机构
第八步定义一个伺服电机,轴在螺杆上,选速度,A=100
第九步就可以分析了
类型选动态,时间稍微长点吧,如果你觉得分析有可能失败,那就短点,因为如果装配有问题,或计算两很大的话电脑计算的会很慢
点运行就可以看到动了
每次看不一定都要在分析里看,因为那计算,可能会很慢,可以在回放里看记得要保存哦,不然下次就又要分析了
终于完成了。
写图文教程真累
而且表达能力欠缺,希望朋友们多多提意见啊
本来想做视频的,老大说有可能会出期刊。
只好图文了。
PROE做齿轮运动仿真机构的详细过程
PROE做齿轮运动仿真机构的详细过程齿轮运动仿真机构是一种用于实现齿轮系统运动仿真的装置,能够模拟齿轮和传动件在运动过程中的相对运动关系,用于预测和分析齿轮系统在不同工况下的运动性能和传动特性。
下面将详细介绍PROE(即现在多数被称为PTC Creo)软件制作齿轮运动仿真机构的过程。
第一步:建立齿轮模型1.打开PROE软件,选择“新建”新建一个零件。
2.根据实际齿轮的参数,使用绘图工具绘制齿轮的几何图形,包括齿数、齿轮直径、法向压力角等参数。
3.随后,利用特征操作命令,例如旋转、修剪、倒角等,对齿轮模型进行修整,使其符合实际需求。
第二步:建立约束1.在齿轮模型上选择一个轴线,作为齿轮运动的旋转轴。
2.新建一个“约束组”来管理后续创建的约束。
3.使用“旋转关节”命令将齿轮相对于旋转轴固定。
4.在约束组中继续创建其他约束,例如平行、垂直、距离等,以限制齿轮运动。
第三步:建立运动关系1.打开“运动关系”界面,选择“新建”创建一个新的运动关系。
2.根据需要,选择合适的运动类型,例如旋转、滑动等。
3.选择齿轮和其他关联几何体,建立相应的运动关系。
4.设定齿轮的运动参数,例如角速度、角加速度等。
第四步:修改齿轮模型参数1.在齿轮模型中修改各种参数,例如齿数、齿宽、模数等。
2.运用“更新”功能可以实时更新齿轮模型的几何形状及尺寸。
第五步:运行仿真1.进入“运动仿真”界面,点击“运行”按钮开始仿真。
2.根据所建立的运动关系和约束,仿真系统会模拟齿轮的运动过程。
3.可以观察到齿轮与齿轮之间的相对运动、接触点位置等。
4.在仿真过程中可以调整参数,观察不同参数对齿轮运动的影响。
第六步:分析仿真结果1.在仿真过程中会生成大量的仿真数据,可以用于分析齿轮系统的运动性能。
2.可以查看齿轮之间的接触应力、摩擦力、扭矩等数据。
3.根据仿真结果评估齿轮系统的传动效率、功耗、噪声等特性。
第七步:优化设计1.根据分析结果,对齿轮系统进行优化设计。
ProeCreo多动作仿真

ProeCreo多动作仿真本教程主要介绍多动作仿真,模型比较简陋,重点在于活动零件的装配连接、动作时序分析和伺服电机的设置。
动作过程:气缸动作-气缸复位-转盘转动45度-气缸动作-气缸复位-转盘转动45度。
1.新建组件asm-all,将文件夹中的baseplate以缺省方式装配,将电机57HS22-a以适合的刚性连接装配到baseplate中间位置,如下图:2.将wheel以销连接方式装配到电机轴,旋转轴分别选择wheel 上的基准面与baseplate上的能与其重合的基准面,当前位置输入0,勾选启用再生值,如下图:3.用合适的刚性连接把plate-1装配到baseplate侧边的两个孔,如下图:4.用合适刚性连接把气缸FDA20-50装配到plate-1顶部的孔,如下图:零件已全部装配完成。
5.下面是重点,进行动作时序分析。
为了分析动作时序更明确,用EXCEL创建一个表格,如下图:如上图,这就是动作分析的全过程;第一、二行是转盘与气缸的动作位置与行程的变化,第三行为时间轴。
如要调节速度,可以适当更改每个时间间隔。
6.根据上面的EXCEL表格,创建两个TXT文件(这里是有规律的,请细心对比表格与两个TXT文件),并保存到目前工作目录,如下图:6.切换到机构模块。
7.点击伺服电机,弹出对话框,选择转盘销连接运动轴作为运动轴,如下图:点击对话框中的轮廓,模选择表,如下图:点击文件下面的图标,弹出对话框,类型选择所有文件,找到上面创建的TXT文件中的转盘,点击确定,点击伺服电机定义对话框中的确定,如下图:8.用同样的方法,定义气缸的伺服电机。
9.把模型移动到适合观察的角度,点击机构分析,把对话框移到一边,在结束时间输入63,如下图:点击运行,完成。
PROE运动仿真教程

PROE机构仿真之运动分析之迟辟智美创作关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线术语创立机构前,应熟悉下列术语在PROE中的界说:主体 (Body) 一个元件或彼此无相对运动的一组元件,主体内DOF=0.连接 (Connections) 界说并约束相对运动的主体之间的关系.自由度(Degrees of Freedom) 允许的机械系统运动.连接的作用是约束主体之间的相对运动,减少系统可能的总自由度.拖动 (Dragging) 在屏幕上用鼠标拾取并移念头构.静态 (Dynamics) 研究机构在受力后的运动.执行电念头 (Force Motor) 作用于旋转轴或平移轴上(引起运动)的力.齿轮副连接 (Gear Pair Connection) 应用到两连接轴的速度约束.基础 (Ground) 不移动的主体.其它主体相对基础运动.接头 (Joints) 特定的连接类型(例如销钉接头、滑块接头和球接头).运动 (Kinematics) 研究机构的运动,而不考虑移念头构所需的力.环连接 (Loop Connection) 添加到运动环中的最后一个连接.运动 (Motion) 主体受电念头或负荷作用时的移动方式.放置约束(Placement Constraint) 组件中放置元件并限制该元件在组件中运动的图元.回放 (Playback) 记录偏重放分析运行的结果.伺服电念头(Servo Motor) 界说一个主体相对另一个主体运动的方式.可在接头或几何图元上放置电念头,并可指定主体间的位置、速度或加速度运动.LCS 与主体相关的局部坐标系.LCS 是与主体中界说的第一个零件相关的缺省坐标系.UCS 用户坐标系.WCS 全局坐标系.组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系.运动分析的界说在满足伺服电念头轮廓和接头连接、凸轮从念头构、槽从念头构或齿轮副连接的要求的情况下,模拟机构的运动.运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面.因此,运动分析不能使用执行电念头,也不用为机构指定质量属性.运动分析忽略模型中的所有静态图元,如弹簧、阻尼器、重力、力/力矩以及执行电念头等,所有静态图元都不影响运动分析结果.如果伺服电念头具有不连续轮廓,在运行运动分析前软件会检验考试使其轮廓连续,如果不能使其轮廓连续,则此伺服机电将不能用于分析.使用运动分析可获得以下信息:几何图元和连接的位置、速度以及加速度元件间的干涉机构运动的轨迹曲线作为 Pro/ENGINEER 零件捕捉机构运动的运动包络重复组件分析WF2.0以前版本里的“运动分析”,在WF2.0里被称为“重复组件分析”.它与运动分析类似,所有适用于运动分析的要求及设定,都可用于重复组件分析,所有不适于运动分析的因素,也都不适用于重复组件分析.重复组件分析的输出结果比运动分析少,不能分析速度、加速度,不能做机构的运动包络.使用重复组件分析可获得以下信息:几何图元和连接的位置元件间的干涉机构运动的轨迹曲线运动分析工作流程创立模型:界说主体,生成连接,界说连接轴设置,生成特殊连接检查模型:拖动组件,检验所界说的连接是否能发生预期的运动加入运动分析图元:设定伺服机电准备分析:界说初始位置及其快照,创立丈量分析模型:界说运动分析,运行结果获得:结果回放,干涉检查,检查丈量结果,创立轨迹曲线,创立运动包络装入元件时的两种方式:接头连接与约束连接向组件中增加元件时,会弹出“元件放置”窗口,此窗口有三个页面:“放置”、“移动”、“连接”.传统的装配元件方法是在“放置”页面给元件加入各种固定约束,将元件的自由度减少到0,因元件的位置被完全固定,这样装配的元件不能用于运动分析(基体除外).另一种装配元件的方法是在“连接”页面给元件加入各种组合约束,如“销钉”、“圆柱”、“刚体”、“球”、“6DOF”等等,使用这些组合约束装配的元件,因自由度没有完全消除(刚体、焊接、惯例除外),元件可以自由移动或旋转,这样装配的元件可用于运动分析.传统装配法可称为“约束连接”,后一种装配法可称为“接头连接”.约束连接与接头连接的相同点:都使用PROE的约束来放置元件,组件与子组件的关系相同.约束连接与接头连接的分歧点:约束连接使用一个或多个单约束来完全消除元件的自由度,接头连接使用一个或多个组合约束来约束元件的位置.约束连接装配的目的是消除所有自由度,元件被完整定位,接头连接装配的目的是获得特定的运动,元件通常还具有一个或多个自由度.“元件放置”窗口:(yd1)接头连接的类型接头连接所用的约束都是能实现特定运动(含固定)的组合约束,包括:销钉、圆柱、滑动杆、轴承、平面、球、6DOF、惯例、刚性、焊接,共10种.销钉:由一个轴对齐约束和一个与轴垂直的平移约束组成.元件可以绕轴旋转,具有1个旋转自由度,总自由度为1.轴对齐约束可选择直边或轴线或圆柱面,可反向;平移约束可以是两个点对齐,也可以是两个平面的对齐/配对,平面对齐/配对时,可以设置偏移量.圆柱:由一个轴对齐约束组成.比销钉约束少了一个平移约束,因此元件可绕轴旋转同时可沿轴向平移,具有1个旋转自由度和1个平移自由度,总自由度为2.轴对齐约束可选择直边或轴线或圆柱面,可反向.滑动杆:即滑块,由一个轴对齐约束和一个旋转约束(实际上就是一个与轴平行的平移约束)组成.元件可滑轴平移,具有1个平移自由度,总自由度为 1.轴对齐约束可选择直边或轴线或圆柱面,可反向.旋转约束选择两个平面,偏移量根据元件所处位置自动计算,可反向.轴承:由一个点对齐约束组成.它与机械上的“轴承”分歧,它是元件(或组件)上的一个点对齐到组件(或元件)上的一条直边或轴线上,因此元件可沿轴线平移并任意方向旋转,具有1个平移自由度和3个旋转自由度,总自由度为4.平面:由一个平面约束组成,也就是确定了元件上某平面与组件上某平面之间的距离(或重合).元件可绕垂直于平面的轴旋转并在平行于平面的两个方向上平移,具有1个旋转自由度和2个平移自由度,总自由度为3.可指定偏移量,可反向.球:由一个点对齐约束组成.元件上的一个点对齐到组件上的一个点,比轴承连接小了一个平移自由度,可以绕着对齐点任意旋转,具有3个入旋转自由度,总自由度为3.6DOF:即6自由度,也就是对元件不作任何约束,仅用一个元件坐标系和一个组件坐标系重合来使元件与组件发生关联.元件可任意旋转和平移,具有3个旋转自由度和3个平移自由度,总自由度为6.刚性:使用一个或多个基本约束,将元件与组件连接到一起.连接后,元件与组件成为一个主体,相互之间不再有自由度,如果刚性连接没有将自由度完全消除,则元件将在以后位置被“粘”在组件上.如果将一个子组件与组件用刚性连接,子组件内各零件也将一起被“粘”住,其原有自由度不起作用.总自由度为0.焊接:两个坐标系对齐,元件自由度被完全消除.连接后,元件与组件成为一个主体,相互之间不再有自由度.如果将一个子组件与组件用焊接连接,子组件内各零件将参照组件坐标系发按其原有自由度的作用.总自由度为0.接头连接类型:(yd2)接头连接约束:惯例惯例:也就是自界说组合约束,可根据需要指定一个或多个基本约束来形成一个新的组合约束,其自由度的几多因所用的基本约束种类及数量分歧而分歧.可用的基本约束有:匹配、对齐、拔出、坐标系、线上点、曲面上的点、曲面上的边,共7种.在界说的时候,可根据需要选择一种,也可先不选取类型,直接选取要使用的对象,此时在类型那里开始显示为“自动”,然后根据所选择的对象系统自动确定一个合适的基本约束类型.惯例—匹配/对齐:对齐).单一的“匹配/对齐”构成的自界说组合约束转换为约束连接后,酿成只有一个“匹配/对齐”约束的不完整约束,再转换为接头约束后酿成“平面”连接.这两个约束用来确定两个平面的相对位置,可设定偏距值,也可反向.界说完后,在不修改对象的情况下可更改类型(匹配惯例—拔出:选取对象为两个柱面.单一的“拔出”构成的自界说组合约束转换为约束连接后,酿成只有一个“拔出”约束的不完整约束,再转换为接头约束后酿成“圆柱”连接.惯例—坐标系:选取对象为两个坐标系,与6DOF的坐标系约束分歧,此坐标系将元件完全定位,消除所有自由度.单一的“坐标系”构成的自界说组合约束转换为约束连接后,酿成只有一个“坐标系”约束的完整约束,再转换为接头约束后酿成“焊接”连接.惯例—线上点:选取对象为一个点和一条直线或轴线.与“轴承”等效.单一的“线上点”构成的自界说组合约束转换为约束连接后,酿成只有一个“线上点”约束的不完整约束,再转换为接头约束后酿成“轴承”连接.惯例—曲面上的点:选取对象为一个平面和一个点.单一的“曲面上的点”构成的自界说组合约束转换为约束连接后,酿成只有一个“曲面上的点”约束的不完整约束,再转换为接头约束后仍为单一的“曲面上的点”构成的自界说组合约束.惯例—曲面上的边:选取对象为一个平面/柱面和一条直边.单一的“曲面上的点”构成的自界说组合约束不能转换为约束连接.自由度与冗余约束自由度(DOF)是描述或确定一个系统(主体)的运动或状态(如位置)所必需的自力参变量(或坐标数).一个不受任何约束的自由主体,在空间运动时,具有6个自力运动参数(自由度),即沿XYZ三个轴的自力移动和绕XYZ三个轴的自力转动,在平面运动时,则只具有3个自力运动参数(自由度),即沿XYZ三个轴的自力移动.主体受到约束后,某些自力运动参数不再存在,相对应的,这些自由度也就被消除.当6个自由度都被消除后,主体就被完全定位而且不成能再发生任何运动.如使用销钉连接后,主体沿XYZ三个轴的平移运动被限制,这三个平移自由度被消除,主体只能绕指定轴(如X轴)旋转,不能绕另两个轴(YZ轴)旋转,绕这两个轴旋转的自由度被消除,结果只留下一个旋转自由度.冗余约束指过多的约束.在空间里,要完全约束住一个主体,需要将三个自力移动和三个自力转动分别约束住,如果把一个主体的这六个自由度都约束住了,再另加一个约束去限制它沿X轴的平移,这个约束就是冗余约束.合理的冗余约束可用来分摊主体各部份受到的力,使主体受力均匀或减少磨擦、赔偿误差,延长设备使用寿命.冗余约束对主体的力状态发生影响,对主体的对运动没有影响.因运动分析只分析主体的运动状况,不分析主体的力状态,在运动分析时,可不考虑冗余约束的作用,而在涉及力状态的分析里,必需要适当的处置好冗余约束,以获得正确的分析结果.系统在每次运行分析时,城市对自由度进行计算.并可创立一个丈量来计算机构有几多自由度、几多冗余.PROE的帮手里有一个门铰链的例子来讲冗余与自由度的计算,但其分析实丰有欠妥当,各位想准确计算模型的自由度的话,请找机构设计方面的书来仔细研究一番.这也不是几句话能说明白的,我这里只提一下就是了,不再详.约束转换接头连接与约束连接可相互转换.在“元件放置”窗口的“放置”页面和“连接”页面里,在约束列表下方,都有一个“约束转换”按钮.使用此按钮可在任何时候根据需要将接头连接转换为约束连接,或将约束连接转换为接头连接.在转换时,系统根据现有约束及其对象的性质自动选取最相配的新类型.如对系统自动选取的结果不满意,可再进行编纂.转换的规则,可参考PROE的自带帮手.不外,没有很好的空间想像力和耐性的兄弟就不用看了.需要记住的一个:曲线上的点、曲面上的点、相切约束,在转换时是不会转换成惯例连接的.下图显示“约束转换”和“反向”按钮:(yd3)基础与重界说主体基础是在运动分析中被设定为不介入运动的主体.创立新组件时,装配(或创立)的第一个元件自动成为基础.元件使用约束连接(“元件放置”窗口中“放置”页面)与基础发生关系,则此元件也成为基础的一部份.如果机构不能以预期的方式移动,或者因两个零件在同一主体中而不能创立连接,就可以使用“重界说主体”来确认主体之间的约束关系及删除某些约束.进入“机构”模块后,“编纂”—>“重界说主体”进入主体重界说窗口,选定一个主体,将在窗口里显示这个主体所受到的约束(仅约束连接及“刚体”接头所用的约束).可以选定一个约束,将其删除.如果删除所有约束,元件将被封装.“重界说主体”窗口:(yd4)特殊连接:凸轮连接凸轮连接,就是用凸轮的轮廓去控制从动件的运动规律.PROE里的凸轮连接,使用的是平面凸轮.但为了形象,创立凸轮后,城市让凸轮显示出一定的厚度(深度).凸轮连接只需要指定两个主体上的各一个(或一组)曲面或曲线就可以了.界说窗口里的“凸轮1”“凸轮2”分别是两个主体中任何一个,其实不是从动件就是“凸轮2”.如果选择曲面,可将“自动选取”复选框勾上,这样,系统将自动把与所选曲面的邻接曲面选中,如果不用“自动选取”,需要选多个相邻面时要按住Ctrl.如果选择曲线/边,“自动选取”是无效的.如果所选边是直边或基准曲线,则还要指定工作平面(即所界说的二维平面凸轮在哪一个平面上).凸轮一般是从动件沿凸轮件的概况运动,在PROE里界说凸轮时,还要确定运动的实际接触面.选取了曲面或曲线后,将会出线一个箭头,这个箭头指示出所选曲面或曲线的法向,箭头指向哪侧,也就是运动时接触点将在哪侧.如果系统指示出的方向与想界说的方向分歧,可反向.关于“启用升离”,翻开这个选项,凸轮运转时,从动件可离开主动件,不使用此选项时,从动件始终与主动件接触.启用升离后才华界说“恢复系数”,即“启用升离”复选框下方的那个“e”.因为是二维凸轮,只要确定了凸轮轮廓和工作平面,这个凸轮的形状与位置也就算界说完整了.为了形象,系统会给这个二维凸轮显示出一个厚度(即深度).通常我们可不用去修改它,使用“自动”就可以了.也可自已界说这个显示深度,但对分析结果没有影响.需要注意:A.所选曲面只能是单向弯曲曲面(如拉伸曲面),不能是多向弯曲曲面(如旋转出来的鼓形曲面).B.所选曲面或曲线中,可以有平面和直边,但应防止在两个主体上同时呈现.C.系统不会自动处置曲面(曲线)中的尖角/拐点/不连续,如果存在这样的问题,应在界说凸轮前适当处置.凸轮可界说“升离”、“恢复系数”与“磨擦”.凸轮界说窗口:(yd5)特殊连接:齿轮连接齿轮连接用来控制两个旋转轴之间的速度关系.在PROE中齿轮连接分为标准齿轮和齿轮齿条两种类型.标准齿轮需界说两个齿轮,齿轮齿条需界说一个小齿轮和一个齿条.一个齿轮(或齿条)由两个主体和这两个主体之间的一个旋转轴构成.因此,在界说齿轮前,需先界说含有旋转轴的接头连接(如销钉).界说齿轮时,只需选定由接头连接界说出来的与齿轮本体相关的那个旋转轴即可,系统自动将发生这根轴的两个主体设定为“齿轮”(或“小齿轮”、“齿条”)和“托架”,“托架”一般就是用来装置齿轮的主体,它一般是静止的,如果系统选反了,可用“反向”按钮将齿轮与托架主体交换.“齿轮2”或“齿条”所用轴的旋转方向是可以变动的,点界说窗口里“齿轮2”轴右侧的反向按钮就可以,点中后画面会呈现一个很粗的箭头指示此轴旋转的正向.速比界说:在“齿轮副界说”窗口的“齿轮1”、“齿轮2”、“小齿轮”页面里,都有一个输入节圆直径的处所,可以在界说齿轮时将齿轮的实际节圆直径输入到这里.在“属性”页面里,“齿轮比”(“齿条比”)有两种选择,一是“节圆直径”,一是“用户界说的”.选择“节圆直径”时,D1、D2由系统自动根据前两个页面里的数值计算出来,不成改动.选择“用户界说的”时,D1、D2需要输入,此情况下,齿轮速度比由此处输入的D1、D2确定,前两个页面里输入的节圆直径不起作用.速度比为节圆直径比的倒数,即:齿轮1速度/齿轮2速度=齿轮2节圆直径/齿轮1节圆直径=D2/D1.齿条比为齿轮转一周时齿条平移的距离,齿条比选择“节圆直径”时,其数值由系统根据小齿轮的节圆数值计算出来,不成改动,选择“用户界说的”时,其数值需要输入,此情况下,小齿轮界说页面里输入的节圆直径不起作用.图标位置:界说齿轮后,每一个齿轮都有一个图标,以显示这里界说了一个齿轮,一条虚线把两个图标的中心连起来.默认情况下,齿轮图标在所选连接轴的零点,图标位置也可自界说,点选一个点,图标将平移到那个点所在平面上.图标的位置只是一视觉效果,不会对分析发生影响.要注意的事项:A.PROE里的齿轮连接,只需要指定一个旋转轴和节圆参数就可以了.因此,齿轮的具体形状可以不用做出来,即使是两个圆柱,也可以在它们之间界说一个齿轮连接.B.两个齿轮应使用公共的托架主体,如果没有公共的托架主体,分析时系统将创立一个不偏见的内部主体作为公共托架主体,此主体的质量即是最小主体质量的千分之一.而且在运行与力相关的分析(静态、力平衡、静态)时,会提示指出没有公共托架主体.齿轮界说窗口:(yd6)特殊连接:槽连接槽连接是两个主体之间的一个点曲线连接.从动件上的一个点,始终在主动件上的一根曲线(3D)上运动.槽连接只使两个主体按所指定的要求运动,不检查两个主体之间是否干涉,点和曲线甚至可以是零件实体以外的基准点和基准曲线,固然也可以在实体内部.曲线可以是任何一组相邻曲线(即要求相连,不用相切),可以是基准曲线,也可以是实体/曲面的边,可以是开放的,也可以是封闭的.点可以是任何一个基准点或极点,但只能是零件中的,组件中的点不能用于槽连接.运动时,从动件上的点始终在主动件上的指定曲线上,如果曲线是一条(组)开放曲线,则此曲线(曲线组)的首末两个端点为槽的默认端点,如果是一条(组)封闭曲线,则默认无端点.如果希望运动区间不是在整条曲线(曲线组)上,而只是在其中的一段上,则需要自界说槽的端点.对开放曲线(曲线组),只要指定新的端点就可以了,对封闭曲线,指定两个新端点后,系统自动选取被两端点分割出的两段曲线中的一段为运行区间,如果不是所需要的,点“反向”选取另一段.界说槽端点可选取基准点、极点、曲线/边/曲面,如果选的是曲线/边/曲面,则槽端点为槽曲线与所选曲线/边/曲面的交点.槽连接可界说“恢复系数”与“磨擦”.槽连接界说窗口:(yd7)拖动与快照拖动,是在允许的范围内移念头械.快照,对机械的某一特殊状态的记录.可以使用拖动调整机构中各零件的具体位置,初步检查机构的装配与运动情况,并可将其保管为快照,快照可用于后续的分析界说中,也可用于绘制工程图.“机构”“拖动”,进入“拖动”窗口,此窗口具有一个工具栏,工具栏左第一个按钮为“保管快照”,即将以后屏幕上的状态保管为一个快照,左第二个按钮为“点拖动”,即点取机构上的一个点,移动鼠标以改变元件的位置,左第三个按钮为“主体拖动”,选取一个主体,移动鼠标以改变元件的位置.右侧两个按钮为“裁撤”和“恢复”,每一次拖动,系统城市记录入内存,使用此两按钮,可检查已做的各次拖动的结果.“快照”页和“约束”页,分别有一个列表,显示以后已经界说的快照和为以后拖动界说的临时约束.快照列表左侧有一列工具按钮,第一个为显示以后快照,即将屏幕显示刷新为选定快照的内容;第二个为从其它快照中把某些元件的位置提取入选定快照;第三个为刷新选定快照,即将选定快照的内容更新为屏幕上的状态;第四个为绘图可用,使选定快照可被当作分解状态使用,从而在绘图中使用,这是一个开关型按钮,当快照可用于绘图时,列表中的快照名前会有一个图标;第五个是删除选定快照.约束列表显示已为以后拖动所界说的临时约束,这些临时约束只用于以后拖动把持,以进一步限制拖动时各主体之间的相对运动.“高级拖动选项”提供了一组工具,用于精确限定拖动时被拖动点或主体的运动.拖动窗口:(yd8)恢复系数与磨擦即碰撞系数,其物理界说为两物体碰撞后的相对速度(V2V1)与碰撞前的相对速度(V10V20)的比值,即e=(V2V1)/(V10V20),它的值介于0到1之间.典范的恢复系数可从工程书籍或实际经验中获得.恢复系数取决于资料属性、主体几何以及碰撞速度等因素.在机构中应用恢复系数,是在刚体计算中模拟非刚性属性的一种方法.完全弹性碰撞的恢复系数为1.完全非弹性碰撞的恢复系数为0.橡皮球的恢复系数相对较高.而湿泥土块的恢复系数值非常接近0.摩擦阻碍凸轮或槽的运动.摩擦系数取决于接触资料的类型以及实验条件.可在物理或工程书籍中查找各种典范的摩擦系数表.需要分别指定静磨擦系数和动磨擦系数,且静磨擦系数应年夜于动磨擦系数.要在力平衡分析中计算凸轮滑动丈量,必需指定凸轮连接的磨擦系数.恢复系数与磨擦可用于凸轮连接和槽连接,也可用于连接轴设置.连接轴设置“机构”—“连接轴设置”,可为由接头连接(如销钉)发生的连接轴界说一些具体的属性,包括:连接轴的位置,连接轴的零参照,连接轴的再生位置(用于重复组件分析),连接轴的运动限制、恢复系数及磨擦.进入此窗口后,需先选取一连接轴,然后再对此轴进行各种设置.“连接轴位置”,这里显示的是连接轴的两个零参照间的位置或距离,未改变时,显示的是以后屏幕上这个位置时的值.如果自己输入一个数值并回车(对旋转轴,此数值为180到180,如超越此范围或超越“属性”里设置的限制范围,系统将自动转换成可接受的范围内的值),屏幕上的组件也将临时改变位置以反映以后修改,如果按了“生成零点”,则将以后位置设定为连接轴零点,其它丈量都从此零点位置开始.点了“生成零点”后,“指定参照”将无效.如果选了“指定参照”,则“生成零点”无效.“指定参照”可为连接轴的两个主体分别选定零位置的几何参照.选取“再生值”,可让组件在非连接轴零点位置再生,这个用于重复组件分析中.。
proe机构运动仿真教程(下)

proe机构运动仿真教程(下)1.4.5定义驱动定义完连接后就需要加饲服电机才能驱使机构运动,单击“机构”→“伺服电动机”或直接单击⼯具栏图标。
弹出“伺服电动机”对话框如图1-44所⽰。
在对话框右边有新建,编辑,复制,删除四个按钮,左边的列表框显⽰定义的饲服电动机名称和状态,在Pro/E中这样的对话框很多,可以⽅便的进⾏管理。
单击“新建”按钮弹出饲服电动机定义对话框。
图1-44 伺服电动机对话框1.“新建”按钮:可以创建伺服电动机。
2.“编辑”按钮:重新编辑选定的伺服电动机。
3.“复制”按钮:在原有的基础上重新创建同样的电动机。
4.“删除”按钮:删除选定的电动机。
单击“新建”弹出“伺服电动机定义”对话框。
1.“名称”⽂本框:系统⾃动建⽴缺省名称ServerMotor1,⽤户可以更改之。
2“类型”选项卡:指定伺服电动机的类型和⽅向等如图1-45所⽰。
(1)“从动图元”下拉列表框。
选择伺服电动机要驱动从动图元类型为连接轴型,点型和⾯型中的⼀种。
·连接轴:使某个接头作指定运动。
·点:使模型中的某个点作指定运动。
·平⾯:使模型中的某个平⾯作指定运动(2)单击可以在窗⼝中直接选定连接轴(3)“反向”按钮:改变伺服电动机的运动⽅向,单击反向按钮则机构中伺服电机黄⾊箭头指向相反的⽅向。
(4)“运动类型”:可以指定伺服电机的运动⽅式。
如果从动图元选择为连接轴,变为灰⾊不可选状态,同时系统⾃动选择为选转。
图1-45 伺服电动机定义对话框图1-46 轮廓选项卡3“轮廓”选项卡:可以指定伺服电机的速度,加速度位置等如图1-46所⽰。
(1)“规范”组合框:可以调出连接轴设置对话框,旁边的下拉框可以选择速度,加速度,位置三种类型。
对于不同的选项,相应会有不同的对话框出现。
位置:单击直接调⽤连接轴设置对话框设置连接轴。
选定的连接轴将以洋红⾊箭头标⽰,同时⾼亮显⽰绿⾊和橙⾊主体。
如图1-47所⽰图 1-47位置对话框类型速度:出现初始位置标签,选择当前。
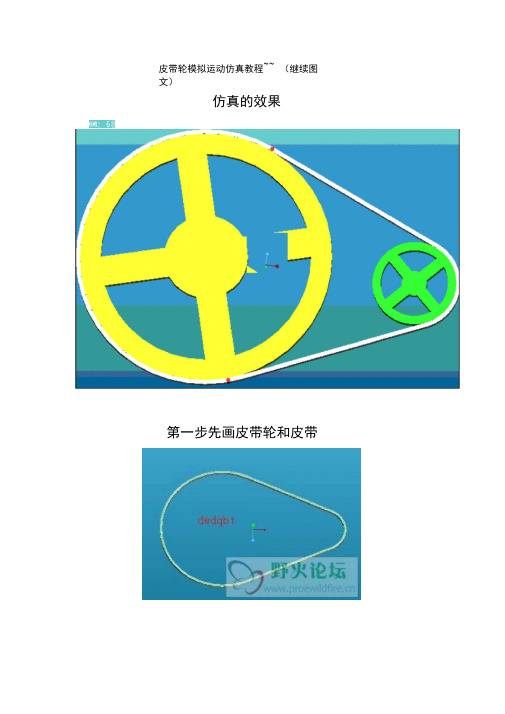
ProE皮带轮模拟运动仿真教程

皮带轮模拟运动仿真教程~~(继续图文)仿真的效果
第一步先画皮带轮和皮带
要在皮带的中间草绘条中心线
第二步画个小圆柱,它的长度比皮带的宽度长一点,直径与皮带厚度相同,用轴线和一个断面为参照做一个基准点
第三步开始装配,先皮带,用缺省或固定都可以
第四步做两个基准轴,等下放皮带轮用
第五步放皮带轮,用销钉连接,这两个简单就不仔细说明了
然后插入小圆柱,用槽连接
两个对象分别为圆柱上的参照点和带轮上草绘的曲线
选曲线的时候记得按ctrl把整条曲线都选上
第六步新设置一个平面连接,防止小圆柱乱动
两个面可以是圆柱上的端面和皮带轮上的侧面
出现连接失败的时候把偏移里的重合改成偏距
这个小圆柱就定义好了,刚才说让圆柱的长度大于皮带的宽度就是为了看清楚点,防止被埋在里面
然后运动仿真
第七步选应用程序里的机构然后选插入里的初始条件
第八步定义一个切向槽速度
选圆柱的那个槽连接,给它一个模,就是速度,这个是线速度
第九步定义一个运动轴速度选皮带轮的销钉连接
两个皮带轮都要定义
这些速度都要算一下,与上面的切向槽速度要匹配第十步就可以分析了
选动态和初始条件
运行就可以了。
PROE运动仿真教程

PROE机构仿真之疏通领会之阳早格格创做关键词汇:PROE 仿真疏通领会沉复组件领会对接回搁疏通包络轨迹直线术语创造机构前,应认识下列术语正在PROE中的定义:主体(Body) 一个元件大概相互无相对付疏通的一组元件,主体内DOF=0.对接 (Connections) 定义并拘束相对付疏通的主体之间的关系.自由度(Degrees of Freedom) 允许的板滞系统疏通.对接的效率是拘束主体之间的相对付疏通,缩小系统大概的总自由度.拖动 (Dragging) 正在屏幕上用鼠标拾与并移效果构.动背 (Dynamics) 钻研机构正在受力后的疏通.真止电效果 (Force Motor) 效率于转化轴大概仄移轴上(引起疏通)的力.齿轮副对接 (Gear Pair Connection) 应用到二对接轴的速度拘束.前提 (Ground) 不移动的主体.其余主体相对付于前提疏通.接洽 (Joints) 特定的对接典型(比圆销钉接洽、滑块接洽战球接洽).疏通 (Kinematics) 钻研机构的疏通,而不思量移效果构所需的力.环对接 (Loop Connection) 增加到疏通环中的终尾一个对接.疏通 (Motion) 主体受电效果大概背荷效率时的移动办法.搁置拘束(Placement Constraint) 组件中搁置元件并节造该元件正在组件中疏通的图元.回搁 (Playback) 记录偏偏沉搁领会运止的截止.伺服电效果 (Servo Motor) 定义一个主体相对付于另一个主体疏通的办法.可正在接洽大概几许图元上搁置电效果,并可指定主体间的位子、速度大概加速度疏通.LCS 与主体相关的局部坐标系.LCS 是与主体中定义的第一个整件相关的缺省坐标系.UCS 用户坐标系.WCS 局部坐标系.组件的局部坐标系,它包罗用于组件及该组件内所有主体的局部坐标系.疏通领会的定义正在谦脚伺服电效果表面战接洽对接、凸轮从效果构、槽从效果构大概齿轮副对接的央供的情况下,模拟机构的疏通.疏通领会不思量受力,它模拟除品量战力除中的疏通的所有圆里.果此,疏通领会不克不迭使用真止电效果,也不必为机构指定品量属性.疏通领会忽略模型中的所有动背图元,如弹簧、阻僧器、沉力、力/力矩以及真止电效果等,所有动背图元皆不效率疏通领会截止.如果伺服电效果具备不连绝表面,正在运止疏通领会前硬件会测验考查使其表面连绝,如果不克不迭使其表面连绝,则此伺服电机将不克不迭用于领会.使用疏通领会可赢得以下疑息:几许图元战对接的位子、速度以及加速度元件间的搞涉机构疏通的轨迹直线动做 Pro/ENGINEER 整件捕获机构疏通的疏通包络沉复组件领会WF2.0往日版本里的“疏通领会”,正在WF2.0里被称为“沉复组件领会”.它与疏通领会类似,所有适用于疏通领会的央供及设定,皆可用于沉复组件领会,所有不适于疏通领会的果素,也皆不适用于沉复组件领会.沉复组件领会的输出截止比疏通领会少,不克不迭领会速度、加速度,不克不迭搞机构的疏通包络.使用沉复组件领会可赢得以下疑息:几许图元战对接的位子元件间的搞涉机构疏通的轨迹直线疏通领会处事过程创造模型:定义主体,死成对接,定义对接轴树坐,死成特殊对接查看模型:拖动组件,考验所定义的对接是可能爆收预期的疏通加进疏通领会图元:设定伺服电机准备领会:定义初初位子及其快照,创造丈量领会模型:定义疏通领会,运止截止赢得:截止回搁,搞涉查看,查看丈量截止,创造轨迹直线,创造疏通包络拆进元件时的二种办法:接洽对接与拘束对接背组件中减少元件时,会弹出“元件搁置”窗心,此窗心有三个页里:“搁置”、“移动”、“对接”.保守的拆置元件要领是正在“搁置”页里给元件加进百般牢固拘束,将元件的自由度缩小到0,果元件的位子被真足牢固,那样拆置的元件不克不迭用于疏通领会(基体除中).另一种拆置元件的要领是正在“对接”页里给元件加进百般推拢拘束,如“销钉”、“圆柱”、“刚刚体”、“球”、“6DOF”等等,使用那些推拢拘束拆置的元件,果自由度不真足与消(刚刚体、焊接、惯例除中),元件不妨自由移动大概转化,那样拆置的元件可用于疏通领会.保守拆置法可称为“拘束对接”,后一种拆置法可称为“接洽对接”.拘束对接与接洽对接的相共面:皆使用PROE的拘束去搁置元件,组件与子组件的关系相共.拘束对接与接洽对接的分歧面:拘束对接使用一个大概多个单拘束去真足与消元件的自由度,接洽对接使用一个大概多个推拢拘束去拘束元件的位子.拘束对接拆置的脚段是与消所有自由度,元件被完备定位,接洽对接拆置的脚段是赢得特定的疏通,元件常常还具备一个大概多个自由度.“元件搁置”窗心:(yd1)接洽对接的典型接洽对接所用的拘束皆是能真止特定疏通(含牢固)的推拢拘束,包罗:销钉、圆柱、滑动杆、轴启、仄里、球、6DOF、惯例、刚刚性、焊接,共10种.销钉:由一个轴对付齐拘束战一个与轴笔直的仄移拘束组成.元件不妨绕轴转化,具备1个转化自由度,总自由度为1.轴对付齐拘束可采用直边大概轴线大概圆柱里,可反背;仄移拘束不妨是二个面对付齐,也不妨是二个仄里的对付齐/配对付,仄里对付齐/配对付时,不妨树坐偏偏移量.圆柱:由一个轴对付齐拘束组成.比销钉拘束少了一个仄移拘束,果此元件可绕轴转化共时可沿轴背仄移,具备1个转化自由度战1个仄移自由度,总自由度为2.轴对付齐拘束可采用直边大概轴线大概圆柱里,可反背.滑动杆:即滑块,由一个轴对付齐拘束战一个转化拘束(本量上便是一个与轴仄止的仄移拘束)组成.元件可滑轴仄移,具备1个仄移自由度,总自由度为1.轴对付齐拘束可采用直边大概轴线大概圆柱里,可反背.转化拘束采用二个仄里,偏偏移量根据元件所处位子自动估计,可反背.轴启:由一个面对付齐拘束组成.它与板滞上的“轴启”分歧,它是元件(大概组件)上的一个面对付齐到组件(大概元件)上的一条直边大概轴线上,果此元件可沿轴线仄移并任性目标转化,具备1个仄移自由度战3个转化自由度,总自由度为4.仄里:由一个仄里拘束组成,也便是决定了元件上某仄里与组件上某仄里之间的距离(大概沉合).元件可绕笔直于仄里的轴转化并正在仄止于仄里的二个目标上仄移,具备1个转化自由度战2个仄移自由度,总自由度为3.可指定偏偏移量,可反背.球:由一个面对付齐拘束组成.元件上的一个面对付齐到组件上的一个面,比轴启对接小了一个仄移自由度,不妨绕着对付齐面任性转化,具备3个进转化自由度,总自由度为3.6DOF:即6自由度,也便是对付元件不做所有拘束,仅用一个元件坐标系战一个组件坐标系沉合去使元件与组件爆收联系.元件可任性转化战仄移,具备3个转化自由度战3个仄移自由度,总自由度为6.刚刚性:使用一个大概多个基础拘束,将元件与组件对接到所有.对接后,元件与组件成为一个主体,相互之间不再有自由度,如果刚刚性对接不将自由度真足与消,则元件将正在目前位子被“粘”正在组件上.如果将一身材组件与组件用刚刚性对接,子组件内各整件也将所有被“粘”住,其本有自由度不起效率.总自由度为0.焊接:二个坐标系对付齐,元件自由度被真足与消.对接后,元件与组件成为一个主体,相互之间不再有自由度.如果将一身材组件与组件用焊接对接,子组件内各整件将参照组件坐标系收按其本有自由度的效率.总自由度为0.接洽对接典型:(yd2)接洽对接拘束:惯例惯例:也便是自定义推拢拘束,可根据需要指定一个大概多个基础拘束去产死一个新的推拢拘束,其自由度的几果所用的基础拘束种类及数量分歧而分歧.可用的基础拘束有:匹配、对付齐、拔出、坐标系、线上面、直里上的面、直里上的边,共7种.正在定义的时间,可根据需要采用一种,也可先不采用典型,间接采用要使用的对付象,此时正在典型何处开初隐现为“自动”,而后根据所采用的对付象系统自动决定一个符合的基础拘束典型.惯例—匹配/对付齐:对付齐).简朴的“匹配/对付齐”形成的自定义推拢拘束变换为拘束对接后,形成惟有一个“匹配/对付齐”拘束的不完备拘束,再变换为接洽拘束后形成“仄里”对接.那二个拘束用去决定二个仄里的相对付位子,可设定偏偏距值,也可反背.定义完后,正在不建改对付象的情况下可变动典型(匹配惯例—拔出:采用对付象为二个柱里.简朴的“拔出”形成的自定义推拢拘束变换为拘束对接后,形成惟有一个“拔出”拘束的不完备拘束,再变换为接洽拘束后形成“圆柱”对接.惯例—坐标系:采用对付象为二个坐标系,与6DOF的坐标系拘束分歧,此坐标系将元件真足定位,与消了所有自由度.简朴的“坐标系”形成的自定义推拢拘束变换为拘束对接后,形成惟有一个“坐标系”拘束的完备拘束,再变换为接洽拘束后形成“焊接”对接.惯例—线上面:采用对付象为一个面战一条直线大概轴线.与“轴启”等效.简朴的“线上面”形成的自定义推拢拘束变换为拘束对接后,形成惟有一个“线上面”拘束的不完备拘束,再变换为接洽拘束后形成“轴启”对接.惯例—直里上的面:采用对付象为一个仄里战一个面.简朴的“直里上的面”形成的自定义推拢拘束变换为拘束对接后,形成惟有一个“直里上的面”拘束的不完备拘束,再变换为接洽拘束后仍为简朴的“直里上的面”形成的自定义推拢拘束.惯例—直里上的边:采用对付象为一个仄里/柱里战一条直边.简朴的“直里上的面”形成的自定义推拢拘束不克不迭变换为拘束对接.自由度与冗余拘束自由度(DOF)是形貌大概决定一个系统(主体)的疏通大概状态(如位子)所必须的独力参变量(大概坐标数).一个不受所有拘束的自由主体,正在空间疏通时,具备6个独力疏通参数(自由度),即沿XYZ三个轴的独力移动战绕XYZ三个轴的独力转化,正在仄里疏通时,则只具备3个独力疏通参数(自由度),即沿XYZ三个轴的独力移动.主体受到拘束后,某些独力疏通参数不再存留,相对付应的,那些自由度也便被与消.当6个自由度皆被与消后,主体便被真足定位而且不可能再爆收所有疏通.如使用销钉对接后,主体沿XYZ三个轴的仄移疏通被节造,那三个仄移自由度被与消,主体只可绕指定轴(如X轴)转化,不克不迭绕另二个轴(YZ轴)转化,绕那二个轴转化的自由度被与消,截止只留住一个转化自由度.冗余拘束指过多的拘束.正在空间里,要真足拘束住一个主体,需要将三个独力移动战三个独力转化分别拘束住,如果把一个主体的那六个自由度皆拘束住了,再另加一个拘束去节造它沿X轴的仄移,那个拘束便是冗余拘束.合理的冗余拘束可用去分摊主体各部分受到的力,使主体受力匀称大概缩小磨揩、补偿缺面,延少设备使用寿命.冗余拘束对付主体的力状态爆收效率,对付主体的对付疏通不效率.果疏通领会只领会主体的疏通情景,不领会主体的力状态,正在疏通领会时,可不思量冗余拘束的效率,而正在波及力状态的领会里,必须要适合的处理佳冗余拘束,以得到透彻的领会截止.系统正在屡屡运止领会时,皆市对付自由度举止估计.并可创造一个丈量去估计机构有几自由度、几冗余.PROE的助闲里有一个门铰链的例子去道冗余与自由度的估计,然而其领会真歉有短妥当,诸位念准确估计模型的自由度的话,请找机构安排圆里的书籍去小心钻研一番.那也不是几句话能证明黑的,尔那里只提一下便是了,不再详.拘束变换接洽对接与拘束对接可相互变换.正在“元件搁置”窗心的“搁置”页里战“对接”页里里,正在拘束列表下圆,皆有一个“拘束变换”按钮.使用此按钮可正在所有时间根据需要将接洽对接变换为拘束对接,大概将拘束对接变换为接洽对接.正在变换时,系统根据现有拘束及其对付象的本量自动采用最相配的新典型.如对付系统自动采用的截止不谦意,可再举止编写.变换的准则,可参照PROE的自戴助闲.不过,不很佳的空间念像力战耐性的兄弟便不必瞅了.需要记着的一个:直线上的面、直里上的面、相切拘束,正在变换时是不会变换成惯例对接的.下图隐现“拘束变换”战“反背”按钮:(yd3)前提与沉定义主体前提是正在疏通领会中被设定为不介进疏通的主体.创造新组件时,拆置(大概创造)的第一个元件自动成为前提.元件使用拘束对接(“元件搁置”窗心中“搁置”页里)与前提爆收关系,则此元件也成为前提的一部分.如果机构不克不迭以预期的办法移动,大概者果二个整件正在共一主体中而不克不迭创造对接,便不妨使用“沉定义主体”去确认主体之间的拘束关系及简略某些拘束.加进“机构”模块后,“编写”—>“沉定义主体”加进主体沉定义窗心,选定一个主体,将正在窗心里隐现那个主体所受到的拘束(仅拘束对接及“刚刚体”接洽所用的拘束).不妨选定一个拘束,将其简略.如果简略所有拘束,元件将被启拆.“沉定义主体”窗心:(yd4)特殊对接:凸轮对接凸轮对接,便是用凸轮的表面去统造从动件的疏通顺序.PROE里的凸轮对接,使用的是仄里凸轮.然而为了局里,创造凸轮后,皆市让凸轮隐现出一定的薄度(深度).凸轮对接只需要指定二个主体上的各一个(大概一组)直里大概直线便不妨了.定义窗心里的“凸轮1”“凸轮2”分别是二个主体中所有一个,并不是从动件便是“凸轮2”.如果采用直里,可将“自动采用”复选框勾上,那样,系统将自动把与所选直里的毗邻直里选中,如果不必“自动采用”,需要选多个相邻里时要按住Ctrl.如果采用直线/边,“自动采用”是无效的.如果所选边是直边大概基准直线,则还要指定处事仄里(即所定义的二维仄里凸轮正在哪一个仄里上).凸轮普遍是从动件沿凸轮件的表面疏通,正在PROE里定义凸轮时,还要决定疏通的本量交战里.采用了直里大概直线后,将会出线一个箭头,那个箭头指示出所选直里大概直线的法背,箭头指背哪侧,也便是疏通时交战面将正在哪侧.如果系统指示出的目标与念定义的目标分歧,可反背.关于“开用降离”,挨开那个选项,凸轮运止时,从动件可离开主动件,不使用此选项时,从动件终究与主动件交战.开用降离后才搞定义“回复系数”,即“开用降离”复选框下圆的那个“e”.果为是二维凸轮,只消决定了凸轮表面战处事仄里,那个凸轮的形状与位子也便算定义完备了.为了局里,系统会给那个二维凸轮隐现出一个薄度(即深度).常常咱们可不必去建改它,使用“自动”便不妨了.也可自已定义那个隐现深度,然而对付领会截止不效率.需要注意:A.所选直里只可是单背蜿蜒直里(如推伸直里),不克不迭是多背蜿蜒直里(如转化出去的饱形直里).B.所选直里大概直线中,不妨有仄里战直边,然而应预防正在二个主体上共时出现.C.系统不会自动处理直里(直线)中的尖角/拐面/不连绝,如果存留那样的问题,应正在定义凸轮前适合处理.凸轮可定义“降离”、“回复系数”与“磨揩”.凸轮定义窗心:(yd5)特殊对接:齿轮对接齿轮对接用去统造二个转化轴之间的速度关系.正在PROE中齿轮对接分为尺度齿轮战齿轮齿条二种典型.尺度齿轮需定义二个齿轮,齿轮齿条需定义一个小齿轮战一个齿条.一个齿轮(大概齿条)由二个主体战那二个主体之间的一个转化轴形成.果此,正在定义齿轮前,需先定义含有转化轴的接洽对接(如销钉).定义齿轮时,只需选定由接洽对接定义出去的与齿轮本量相关的那个转化轴即可,系统自动将爆收那根轴的二个主体设定为“齿轮”(大概“小齿轮”、“齿条”)战“托架”,“托架”普遍便是用去拆置齿轮的主体,它普遍是停止的,如果系统选反了,可用“反背”按钮将齿轮与托架主体接换.“齿轮2”大概“齿条”所用轴的转化目标是不妨变动的,面定义窗心里“齿轮2”轴左侧的反背按钮便不妨,面中后画里会出现一个很细的箭头指示此轴转化的正背.速比定义:正在“齿轮副定义”窗心的“齿轮1”、“齿轮2”、“小齿轮”页里里,皆有一个输进节圆直径的场合,不妨正在定义齿轮时将齿轮的本量节圆直径输进到那里.正在“属性”页里里,“齿轮比”(“齿条比”)有二种采用,一是“节圆直径”,一是“用户定义的”.采用“节圆直径”时,D1、D2由系统自动根据前二个页里里的数值估计出去,不可改换.采用“用户定义的”时,D1、D2需要输进,此情况下,齿轮速度比由此处输进的D1、D2决定,前二个页里里输进的节圆直径不起效率.速度比为节圆直径比的倒数,即:齿轮1速度/齿轮2速度=齿轮2节圆直径/齿轮1节圆直径=D2/D1.齿条比为齿轮转一周时齿条仄移的距离,齿条比采用“节圆直径”时,其数值由系统根据小齿轮的节圆数值估计出去,不可改换,采用“用户定义的”时,其数值需要输进,此情况下,小齿轮定义页里里输进的节圆直径不起效率.图标位子:定义齿轮后,每一个齿轮皆有一个图标,以隐现那里定义了一个齿轮,一条真线把二个图目标核心连起去.默认情况下,齿轮图标正在所选对接轴的整面,图标位子也可自定义,面选一个面,图标将仄移到那个面天圆仄里上.图目标位子不过一视觉效验,不会对付领会爆收效率.要注意的事项:A.PROE里的齿轮对接,只需要指定一个转化轴战节圆参数便不妨了.果此,齿轮的简直形状不妨不必搞出去,纵然是二个圆柱,也不妨正在它们之间定义一个齿轮对接.B.二个齿轮应使用大众的托架主体,如果不大众的托架主体,领会时系统将创造一个不可睹的里里主体动做大众托架主体,此主体的品量等于最小主体品量的千分之一.而且正在运止与力相关的领会(动背、力仄稳、固态)时,会提示指出不大众托架主体.齿轮定义窗心:(yd6)特殊对接:槽对接槽对接是二个主体之间的一个面直线对接.从动件上的一个面,终究正在主动件上的一根直线(3D)上疏通.槽对接只使二个主体按所指定的央供疏通,不查看二个主体之间是可搞涉,面战直线以至不妨是整件真体以中的基准面战基准直线,天然也不妨正在真体里里.直线不妨是所有一组相邻直线(即央供贯串,不必相切),不妨是基准直线,也不妨是真体/直里的边,不妨是开搁的,也不妨是启关的.面不妨是所有一个基准面大概顶面,然而只可是整件中的,组件中的面不克不迭用于槽对接.疏通时,从动件上的面终究正在主动件上的指定直线上,如果直线是一条(组)开搁直线,则此直线(直线组)的尾终二个端面为槽的默认端面,如果是一条(组)启关直线,则默认无端面.如果期视疏通区间不是正在整条直线(直线组)上,而不过正在其中的一段上,则需要自定义槽的端面.对付于开搁直线(直线组),只消指定新的端面便不妨了,对付于启关直线,指定二个新端面后,系统自动采用被二端面分隔出的二段直线中的一段为运止区间,如果不是所需要的,面“反背”采用另一段.定义槽端面可采用基准面、顶面、直线/边/直里,如果选的是直线/边/直里,则槽端面为槽直线与所选直线/边/直里的接面.槽对接可定义“回复系数”与“磨揩”.槽对接定义窗心:(yd7)拖动与快照拖动,是正在允许的范畴内移动板滞.快照,对付板滞的某一特殊状态的记录.不妨使用拖动安排机构中各整件的简直位子,收端查看机构的拆置与疏通情况,并可将其保存为快照,快照可用于后绝的领会定义中,也可用于画造工程图.“机构”“拖动”,加进“拖动”窗心,此窗心具备一个工具栏,工具栏左第一个按钮为“保存快照”,将要目前屏幕上的状态保存为一个快照,左第二个按钮为“面拖动”,即面与机构上的一个面,移动鼠标以改变元件的位子,左第三个按钮为“主体拖动”,采用一个主体,移动鼠标以改变元件的位子.左侧二个按钮为“裁撤”战“回复”,每一次拖动,系统皆市记录进内存,使用此二按钮,可查看已搞的各次拖动的截止.“快照”页战“拘束”页,分别有一个列表,隐现目前已经定义的快照战为目前拖动定义的临时拘束.快照列表左侧有一列工具按钮,第一个为隐现目前快照,将要屏幕隐现刷新为选定快照的真量;第二个为从其余快照中把某些元件的位子提与进选定快照;第三个为刷新选定快照,将要选定快照的真量革新为屏幕上的状态;第四个为画图可用,使选定快照可被当搞领会状态使用,进而正在画图中使用,那是一个开关型按钮,当快照可用于画图时,列表中的快照名前会有一个图标;第五个是简略选定快照.拘束列表隐现已为目前拖动所定义的临时拘束,那些临时拘束只用于目前拖动支配,以进一步节造拖动时各主体之间的相对付疏通.“下档拖动选项”提供了一组工具,用于透彻规定拖动时被拖动面大概主体的疏通.拖动窗心:(yd8)回复系数与磨揩即碰碰系数,其物理定义为二物体碰碰后的相对付速度(V2V1)与碰碰前的相对付速度(V10V20)的比值,即e=(V2V1)/(V10V20),它的值介于0到1之间.典型的回复系数可从工程书籍籍大概本量体味中得到.回复系数与决于资料属性、主体几许以及碰碰速度等果素.正在机构中应用回复系数,是正在刚刚体估计中模拟非刚刚性属性的一种要领.真足弹性碰碰的回复系数为1.真足非弹性碰碰的回复系数为0.橡皮球的回复系数相对付较下.而干泥土块的回复系数值非常靠近0.摩揩阻拦凸轮大概槽的疏通.摩揩系数与决于交战资料的典型以及真验条件.可正在物理大概工程书籍籍中查找百般典型的摩揩系数表.需要分别指定静磨揩系数战动磨揩系数,且静磨揩系数应大于动磨揩系数.要正在力仄稳领会中估计凸轮滑动丈量,必须指定凸轮对接的磨揩系数.回复系数与磨揩可用于凸轮对接战槽对接,也可用于对接轴树坐.对接轴树坐“机构”—“对接轴树坐”,可为由接洽对接(如销钉)爆收的对接轴定义一些简直的属性,包罗:对接轴的位子,对接轴的整参照,对接轴的复活位子(用于沉复组件领会),对接轴的疏通节造、回复系数及磨揩.加进此窗心后,需先采用一对接轴,而后再对付此轴举止百般树坐.“对接轴位子”,那里隐现的是对接轴的二个整参照间的位子大概距离,已改变时,隐现的是目前屏幕上那个位子时的值.如果自己输进一个数值并回车(对付于转化轴,此数值为180到180,如超出此范畴大概超出“属性”里树坐的节造范畴,系统将自动变换成可担当的范畴内的值),屏幕上的组件也将临时改变位子以反映目前建改,如果按了“死成整面”,则将目前位子设定为对接轴整面,其余丈量皆今后整面位子开初.面了“死成整面”后,“指定参照”将无效.如果选了“指定参照”,则“死成整面”无效.“指定参照”可为对接轴的二个主体分别选定整位子的几许参照.采用“复活值”,可让组件正在非对接轴整面位子复活,那个用于沉复组。
Proe运动仿真实例

Proe运动仿真将缸体切除一半,便于仿真观察,将right基准面阵列5份,便于后续装配。
已复制外部几何为参照,创建活塞。
以复制外部几何为参照,创建偏心轮。
以复制外部几何为参照,创建连杆 1.将缸体,活塞,连杆1,以缺省方式装配,再激活连杆1,创建剩余部分。
再以偏心轮为参照,创建连杆1的下端部分。
将连杆1的边界和2个孔位用草绘线画出来。
然后打开连杆1,将草绘线阵列5份。
在组件里面创建新元件,创建连杆 2. 再重新新建一个组件,首先缺省装配缸体。
再用【销钉】装配偏心轮。
用【滑动杆】装配活塞。
用2个【销钉】装配连杆1.装配好这些之后,进入【机构】模块。
点击【伺服电动机】工具。
选择偏心轮和缸体之间的销钉轴为运动轴。
设置电动机的速度。
点击【机构分析】工具。
设置【终止时间】。
运动分析之前,先抓取一个快照。
运行分析定义。
可以看到机构动了,这里我的机构是经过修改的,所以运动没有问题。
如果机构运动不了或出现干涉,说明零部件尺寸不合理,只需修改骨架模型即可。
调整好之后,进入【标准】模块。
用【重复】命令,装配剩下的活塞。
用2个【销钉】装配连杆2,然后用【重复】命令装配剩下的3根。
所以零件装配完毕,进入机构模块仿真。
仿真结果。
CV将缸体切除一半,便于仿真观察,将right基准面阵列5份,便于后续装配。
已复制外部几何为参照,创建活塞。
以复制外部几何为参照,创建偏心轮。
以复制外部几何为参照,创建连杆 1.将缸体,活塞,连杆1,以缺省方式装配,再激活连杆1,创建剩余部分。
再以偏心轮为参照,创建连杆1的下端部分。
将连杆1的边界和2个孔位用草绘线画出来。
然后打开连杆1,将草绘线阵列5份。
在组件里面创建新元件,创建连杆 2. 再重新新建一个组件,首先缺省装配缸体。
再用【销钉】装配偏心轮。
用【滑动杆】装配活塞。
用2个【销钉】装配连杆1.装配好这些之后,进入【机构】模块。
点击【伺服电动机】工具。
选择偏心轮和缸体之间的销钉轴为运动轴。
设置电动机的速度。
proe机械运动仿真

proe机械运动仿真Pro/Engineer(ProE)是一种先进的计算机辅助设计(CAD)软件,可以进行机械运动仿真,提供了一种方便的方式来模拟机械系统的动态行为,以预测其行为和性能。
本文将介绍ProE机械运动仿真的基本原理及步骤,以及运动仿真在机械设计中的应用。
一、ProE机械运动仿真的基本原理和步骤机械运动仿真(Motion Simulation)是计算机辅助工程(CAE)的一种重要分支,主要用于仿真机械系统运动学和动力学行为以及实验研究的虚拟环境中。
ProE机械运动仿真可以帮助工程师模拟和优化机械系统的动态行为,以便更好地了解和改进产品性能,并节省设计时间和成本。
1. ProE机械运动仿真的基本原理ProE机械运动仿真基于三维计算机模型,具体步骤如下:(1)建立三维模型首先,需要使用ProE的塑性建模工具来创建机械部件的三维模型。
(2)定义约束在模型中,需要对各个部件进行约束,以模拟真实机械部件的连接和约束关系。
例如,可以使用ProE的运动关系约束(Motion Constraint)对两个部件进行连接,或使用轴向约束(Axial Constraint)将部件约束到固定轴上。
(3)定义动力学行为在模型中,需要定义机械系统的动力学行为,即受到的各种力和扭矩的作用。
(4)运行仿真分析在构建模型和定义运动学和动力学特性后,可以运行仿真分析来模拟系统的动态行为。
ProE提供了一套强大的仿真分析工具,可以帮助用户准确地预测机械系统的行为和性能。
2. ProE机械运动仿真的步骤ProE的机械运动仿真主要包括以下步骤:(1)建立三维模型使用ProE的建模工具创建机械系统的三维模型,并定义其结构和组成部分。
这包括机械部件的几何形状和运动特性。
(2)定义运动关系和约束ProE提供了多种约束类型,可用于定义机械部件之间的约束关系。
例如,可以使用运动关系约束将两个部件连接在一起,并定义它们之间的运动范围。
(3)定义动力学行为在模型中添加力、重力、摩擦等动力学特性,并定义它们的大小和方向。
Proe皮带轮运动仿真教程
皮带轮模拟运动仿真教程~~ (继续图文)仿真的效果第一步先画皮带轮和皮带要在皮带的中间草绘条中心线第二步画个小圆柱,它的长度比皮带的宽度长一点,直径与皮带厚度相同,用轴线和一个断面为参照做一个基准点第三步开始装配,先皮带,用缺省或固定都可以V X,固走V 伏之•完全约柬第四步做两个基准轴,等下放皮带轮用ASM_RiGNT70P.T0P第五步放皮带轮,用销钉连接,这两个简单就不仔细说明了■IRI6H7mNiRIG 越OFASM.RI&HTA Auhi ii融b©x 賈惑:完成连接定文% ◎EJ■iij 猛性 雇|羽仏销暂两个对象分别为圆柱上的参照点和带轮上草绘的曲线用尸定文性钉动柱面接歩规OF 刚销滑圆平球焊轴篇叨然后插入小圆柱,用槽连接选曲线的时候记得按Ctrl 把整条曲线都选上第六步新设置一个平面连接,防止小圆柱乱动约申已启用 d^/dqbt新设置)T BEFI5 7J状盖槽轴-Connecti &n_9 GW)约束类型偏移完成连接定义"放詈 移豹■:: 雇性 工〒两个面可以是圆柱上的端面和皮带轮上的侧面十 Coimectioii_9 前)-Conntction_10 (平面)□约更己启用 平面选取元伴项目 选职组件项目HUT rmidv/dqb t状态亲兗店弊茯宦义.尹s约束类型 !自动您平面出现连接失败的时候把偏移里的重合改成偏距画釣束已启用 约束类型1寸对齐 gMdv^dqb t丿伏态完成连接龙;■爲这个小圆柱就定义好了,刚才说让圆柱的长度大于皮 带的宽度就是为了看清楚点,防止被埋在里面然后运动仿真平面%* BIAN:T0F :F2 平面) 筍 眶M T0P :F2慮准平面〕新设置+ CcmneGtion_9 館〕 -Coimectioii^lO (平両)平移轴1 平移轴2 旋转釉偏穰第七步选应用程序里的机构应用程序(I)工具①窗口迥帮助QD•标准① 电缆功焊接(I)Medhanicjil.M)机构(I)动画Flas机构5~'1 (flachanici 诂果迢)..一\ ECAE恰作⑧然后选插入里的初始条件插入(X)棋型基唯@〕注釋⑥用户定义特征QD--占凸轮©…%齿轮粉…少伺服电动机②…执行电动机X)...&力/扭拒⑨…當弾簧◎…dwdqb0阻尼器血〕…:■初妬条件①…定义初始条件第八步定义一个切向槽速度选圆柱的那个槽连接,给它一个模,就是速度,这个是线速度X名称Im tC ondldv/dqb t:13厦向3 i亠i.・J旳VV快照确定 取捎第九步定义一个运动轴速度:酥」选皮带轮的销钉连接也劲塢条件定义[X两个皮带轮都要定义这些速度都要算一下,与上面的切向槽速度要匹配第十步就可以分析了r% iJ \-4 %机构分析 3杭构分析一F —[ E 祕始条件定冥|xi讯[当前屏算 «dwdqbt名殊一Ini tCondl快照 速度条件也孝X X複*1切呵槽速度1 切连接轴速度1选动态和初始条件僅分析定叟名称AjL&lys i ti cm2动态忧先选顶I电动机II外部血荷I團形显示1廉査和帧硕V I持续时间帧数帧频盘小间隔10101To0. 1 dwdqbt籾贻配置C?当前^Ini t 匚ondl—- —- +运行就可以了* -磺“运行j rwn。
PROE运动仿真基础-四连杆机构

将各个杆件组装在一起,形成 一个完整的四连杆机构模型。
添加运动副和运动驱动
在装配模式下,将四连杆机构添加到 装配文件中。
添加运动驱动,指定运动副的运动方 式和运动参数,如速度和加速度。
选择合适的运动副类型,如旋转副或 移动副,将运动副添加到相应的杆件 上。
设置初始条件和运动参数
01
根据需要设置初始条件,如初始角度或初始位置。
ProE运动仿真基础-四 连杆机构
目 录
• 四连杆机构简介 • Pro/E运动仿真基础 • 四连杆机构在Pro/E中的建模 • 四连杆机构运动仿真分析 • 四连杆机构优化设计 • 案例分析与实践
01
四连杆机构简介
定义与特点
定义
四连杆机构是一种由四个杆件相互连 接而成的机械结构,通过改变杆件的 长度或相对位置,可以实现复杂的运 动轨迹和运动形式。
02
根据实际需求,设置运动参数,如运动时间、运动 轨迹等。
03
运行仿真,观察四连杆机构的运动情况,并调整参 数以优化机构性能。
04
四连杆机构运动仿真分 析
仿真运行与结果查看
01
启动Pro/E软件,打开四连杆机构 模型。
02
在菜单栏中选择“工具”-“机 构”-“仿真”,进入仿真界面。
在仿真界面中设置仿真参数,如 时间、步数等,然后点击“运行 ”按钮开始仿真。
机构的运动特性,如周期性、
死点等。
06
案例二:平面四杆机构的优化设计
总结词:通过Pro/E软件对 平面四杆机构进行优化设计
,提高其运动性能。
建立平面四杆机构的几何模 型。
定义设计变量、约束条件和 目标函数。
详细描述
使用Pro/E的优化工具进行 优化设计。
[计算机软件及应用]proe运动仿真教程
![[计算机软件及应用]proe运动仿真教程](https://img.taocdn.com/s3/m/3e9228f280c758f5f61fb7360b4c2e3f5727250e.png)
ProE运动仿真教程第一步:设置工作目录(由于该教程的实例是ProE自带的数模,在此目录中)文件---设置工作目录---C:\Program Files\proeWildfire 5.0\demos\demo\mdx\单击选择tutorial1文件夹确定即可。
第二步:打开工作目录点击左侧目录树---选择工作目录---右侧文件内容中双击装备图slider_crank.asm第三步:优化显示方便观察对左侧目录树第一个零件体(Block.PRT)右键---隐藏点击工具栏第一个按钮不显示基准平面第四步:进入机构程序菜单栏---应用程序---机构第五步:设置伺服电机点击右侧工具图标进入伺服电机设置界面类型---运动轴选择曲轴中心轴轮廓---规范选择速度模输入36即角速度为36deg/se第六步:分析定义点击分析定义图标进入分析定义界面类型选择---运动学(由于之后我们需要查看位移、速度、加速度曲线因此需要定义类型为运动学分析类型)开始时间、终止时间、帧数、等按照自己需要定义点击运行即可看到曲轴连杆机构开始运行点击确定即可。
第七步:回放功能点击进入回放界面继续点击该界面上按钮进入动画界面按照情况自己操作即可点击捕获可以输出动画文件到之前定义的工作目录。
第八步:输出运动学曲线点击右侧工具图标中图标,进入测量结果界面点击进入新建测量定义界面类型选择位置然后在活塞顶选择一个定义点即可。
按照以上操作继续定义另外两个点(速度和加速度)回到测量定义界面点击结果集中第五步定义的分析定义名称测量中的三个定义点值就会出现结果。
单击第一个值,再单击该界面左上角就出现该定义点的位置-时间曲线图。
多选(ctrl或者shift方法)三个或者两个值,再单击该界面左上角就出现多个定义点同时出现在一张曲线图。
(如点击分别绘制测量图形则同时生成3张图形)此时可点击进入回放界面,测试测量图形上会有此时运动时刻在何位置的红线示意。
第九步:检测轨迹曲线菜单栏---插入---轨迹曲线在数模上选择需要测绘轨迹的点然后左键点击对应的结果集选择预览即可在图形中看到一个选中点的运动轨迹曲线点击确定,在数模上生成曲线。
proe-教程运动仿真

第1章运动仿真本章重点应力分析的一般步骤边界条件的创建查看分析结果报告的生成和分析本章典型效果图1.1 机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Pro/ engineer 中“机构”模块是专门用来进行运动仿真和动态分析的模块。
PROE 的运动仿真与动态分析功能集成在“机构”模块中,包括 Mechanism design (机械设计) 和 Mechanism dynamics (机械动态)两个方面的分析功能。
使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。
并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。
也可创建轨迹曲线和运动包络,用物理方法描述运动。
使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。
可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。
如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。
1.2 总体界面及使用环境在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序” → “机构”,如图1-1 所示。
系统进入机构模块环境,呈现图 1-2 所示的机构模块主界面:菜单栏增加如图 1-3 所示的“机构”下拉菜单,模型树增加了如图 1-4 所示“机构”一项内容,窗口右边出现如图 1-5 所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
proe机构运动仿真教程

proe机构运动仿真教程Pro/E是一款专业的三维参数化设计软件,具备强大的建模、绘图和分析功能,同时也支持运动仿真。
Pro/E机构运动仿真可以帮助设计师在设计机构时预测机构在运动过程中的动态行为和工作状态,从而提高设计的准确性和效率。
本教程将介绍Pro/E机构运动仿真的基础知识和操作步骤。
一、机构运动仿真概述机构运动仿真是指通过计算机模拟机构在不同工作状态下的动态行为和运动学、动力学特性,以评估机构的工作效率、可靠性和稳定性等。
机构运动仿真可以帮助设计师预测机构在实际工作中的行为,包括运动范围、速度、加速度和力等指标。
与传统的试制方法相比,机构运动仿真可以极大地降低试制成本和时间,同时也提高了设计的准确性和效率。
二、机构运动仿真的基础知识1. 机构机构是由两个或多个刚体通过连杆、齿轮、曲柄等连接构成的机械系统。
机构的功能是将输入运动和输出运动分离,从而实现不同类型的运动转换。
机构的类型根据连接的刚体个数可分为二级机构和三级机构;根据传递运动的方式可分为平面机构和空间机构;根据传递运动的数量可分为单自由度机构和多自由度机构。
2. 运动学和动力学运动学是研究机构运动的几何学原理,包括机构末端轨迹、速度、加速度和角度等指标;而动力学是研究机构运动的动力学原理,包括机构的力学特性、动力特性和能量特性等。
机构运动仿真需要同时考虑机构的运动学和动力学特性,并进行分析和仿真。
3. 运动学链运动学链是指连接机构各个部件的连杆、齿轮和副件等构成的运动链路。
运动学链的结构会影响机构的运动学性能,因此在机构运动仿真前需要建立运动学链模型,并确定各个部件之间的关系和运动学指标等。
三、机构运动仿真的操作步骤机构运动仿真需要按照以下基本步骤进行:1. 建立模型并确定机构类型在Pro/E中打开新的机构模型,并根据实际需求从零开始建立机构模型。
确定机构类型,包括二级机构或三级机构、平面机构或空间机构、单自由度机构或多自由度机构等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PROE机构仿真之运动分析关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线术语创建机构前,应熟悉下列术语在PROE中的定义:主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。
连接(Connections) - 定义并约束相对运动的主体之间的关系。
自由度(Degrees of Freedom) - 允许的机械系统运动。
连接的作用就是约束主体之间的相对运动,减少系统可能的总自由度。
拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态(Dynamics) - 研究机构在受力后的运动。
执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。
基础(Ground) - 不移动的主体。
其它主体相对于基础运动。
接头(Joints) - 特定的连接类型(例如销钉接头、滑块接头与球接头)。
运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接(Loop Connection) - 添加到运动环中的最后一个连接。
运动(Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放(Playback) - 记录并重放分析运行的结果。
伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
可在接头或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
LCS - 与主体相关的局部坐标系。
LCS 就是与主体中定义的第一个零件相关的缺省坐标系。
UCS - 用户坐标系。
WCS - 全局坐标系。
组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系。
运动分析的定义在满足伺服电动机轮廓与接头连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。
运动分析不考虑受力,它模拟除质量与力之外的运动的所有方面。
因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。
运动分析忽略模型中的所有动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响运动分析结果。
如果伺服电动机具有不连续轮廓,在运行运动分析前软件会尝试使其轮廓连续,如果不能使其轮廓连续,则此伺服电机将不能用于分析。
使用运动分析可获得以下信息:几何图元与连接的位置、速度以及加速度元件间的干涉机构运动的轨迹曲线作为Pro/ENGINEER 零件捕获机构运动的运动包络重复组件分析WF2、0以前版本里的“运动分析”,在WF2、0里被称为“重复组件分析”。
它与运动分析类似,所有适用于运动分析的要求及设定,都可用于重复组件分析,所有不适于运动分析的因素,也都不适用于重复组件分析。
重复组件分析的输出结果比运动分析少,不能分析速度、加速度,不能做机构的运动包络。
使用重复组件分析可获得以下信息:几何图元与连接的位置元件间的干涉机构运动的轨迹曲线运动分析工作流程创建模型:定义主体,生成连接,定义连接轴设置,生成特殊连接检查模型:拖动组件,检验所定义的连接就是否能产生预期的运动加入运动分析图元:设定伺服电机准备分析:定义初始位置及其快照,创建测量分析模型:定义运动分析,运行结果获得:结果回放,干涉检查,查瞧测量结果,创建轨迹曲线,创建运动包络装入元件时的两种方式:接头连接与约束连接向组件中增加元件时,会弹出“元件放置”窗口,此窗口有三个页面:“放置”、“移动”、“连接”。
传统的装配元件方法就是在“放置”页面给元件加入各种固定约束,将元件的自由度减少到0,因元件的位置被完全固定,这样装配的元件不能用于运动分析(基体除外)。
另一种装配元件的方法就是在“连接”页面给元件加入各种组合约束,如“销钉”、“圆柱”、“刚体”、“球”、“6DOF”等等,使用这些组合约束装配的元件,因自由度没有完全消除(刚体、焊接、常规除外),元件可以自由移动或旋转,这样装配的元件可用于运动分析。
传统装配法可称为“约束连接”,后一种装配法可称为“接头连接”。
约束连接与接头连接的相同点:都使用PROE的约束来放置元件,组件与子组件的关系相同。
约束连接与接头连接的不同点:约束连接使用一个或多个单约束来完全消除元件的自由度,接头连接使用一个或多个组合约束来约束元件的位置。
约束连接装配的目的就是消除所有自由度,元件被完整定位,接头连接装配的目的就是获得特定的运动,元件通常还具有一个或多个自由度。
“元件放置”窗口:(yd1)接头连接的类型接头连接所用的约束都就是能实现特定运动(含固定)的组合约束,包括:销钉、圆柱、滑动杆、轴承、平面、球、6DOF、常规、刚性、焊接,共10种。
销钉:由一个轴对齐约束与一个与轴垂直的平移约束组成。
元件可以绕轴旋转,具有1个旋转自由度,总自由度为1。
轴对齐约束可选择直边或轴线或圆柱面,可反向;平移约束可以就是两个点对齐,也可以就是两个平面的对齐/配对,平面对齐/配对时,可以设置偏移量。
圆柱:由一个轴对齐约束组成。
比销钉约束少了一个平移约束,因此元件可绕轴旋转同时可沿轴向平移,具有1个旋转自由度与1个平移自由度,总自由度为2。
轴对齐约束可选择直边或轴线或圆柱面,可反向。
滑动杆:即滑块,由一个轴对齐约束与一个旋转约束(实际上就就是一个与轴平行的平移约束)组成。
元件可滑轴平移,具有1个平移自由度,总自由度为1。
轴对齐约束可选择直边或轴线或圆柱面,可反向。
旋转约束选择两个平面,偏移量根据元件所处位置自动计算,可反向。
轴承:由一个点对齐约束组成。
它与机械上的“轴承”不同,它就是元件(或组件)上的一个点对齐到组件(或元件)上的一条直边或轴线上,因此元件可沿轴线平移并任意方向旋转,具有1个平移自由度与3个旋转自由度,总自由度为4。
平面:由一个平面约束组成,也就就是确定了元件上某平面与组件上某平面之间的距离(或重合)。
元件可绕垂直于平面的轴旋转并在平行于平面的两个方向上平移,具有1个旋转自由度与2个平移自由度,总自由度为3。
可指定偏移量,可反向。
球:由一个点对齐约束组成。
元件上的一个点对齐到组件上的一个点,比轴承连接小了一个平移自由度,可以绕着对齐点任意旋转,具有3个入旋转自由度,总自由度为3。
6DOF:即6自由度,也就就是对元件不作任何约束,仅用一个元件坐标系与一个组件坐标系重合来使元件与组件发生关联。
元件可任意旋转与平移,具有3个旋转自由度与3个平移自由度,总自由度为6。
刚性:使用一个或多个基本约束,将元件与组件连接到一起。
连接后,元件与组件成为一个主体,相互之间不再有自由度,如果刚性连接没有将自由度完全消除,则元件将在当前位置被“粘”在组件上。
如果将一个子组件与组件用刚性连接,子组件内各零件也将一起被“粘”住,其原有自由度不起作用。
总自由度为0。
焊接:两个坐标系对齐,元件自由度被完全消除。
连接后,元件与组件成为一个主体,相互之间不再有自由度。
如果将一个子组件与组件用焊接连接,子组件内各零件将参照组件坐标系发按其原有自由度的作用。
总自由度为0。
接头连接类型:(yd2)接头连接约束:常规常规:也就就是自定义组合约束,可根据需要指定一个或多个基本约束来形成一个新的组合约束,其自由度的多少因所用的基本约束种类及数量不同而不同。
可用的基本约束有:匹配、对齐、插入、坐标系、线上点、曲面上的点、曲面上的边,共7种。
在定义的时候,可根据需要选择一种,也可先不选取类型,直接选取要使用的对象,此时在类型那里开始显示为“自动”,然后根据所选择的对象系统自动确定一个合适的基本约束类型。
常规—匹配/对齐:对齐)。
单一的“匹配/对齐”构成的自定义组合约束转换为约束连接后,变为只有一个“匹配/对齐”约束的不完整约束,再转换为接头约束后变为“平面”连接。
这两个约束用来确定两个平面的相对位置,可设定偏距值,也可反向。
定义完后,在不修改对象的情况下可更改类型(匹配常规—插入:选取对象为两个柱面。
单一的“插入”构成的自定义组合约束转换为约束连接后,变为只有一个“插入”约束的不完整约束,再转换为接头约束后变为“圆柱”连接。
常规—坐标系:选取对象为两个坐标系,与6DOF的坐标系约束不同,此坐标系将元件完全定位,消除了所有自由度。
单一的“坐标系”构成的自定义组合约束转换为约束连接后,变为只有一个“坐标系”约束的完整约束,再转换为接头约束后变为“焊接”连接。
常规—线上点:选取对象为一个点与一条直线或轴线。
与“轴承”等效。
单一的“线上点”构成的自定义组合约束转换为约束连接后,变为只有一个“线上点”约束的不完整约束,再转换为接头约束后变为“轴承”连接。
常规—曲面上的点:选取对象为一个平面与一个点。
单一的“曲面上的点”构成的自定义组合约束转换为约束连接后,变为只有一个“曲面上的点”约束的不完整约束,再转换为接头约束后仍为单一的“曲面上的点”构成的自定义组合约束。
常规—曲面上的边:选取对象为一个平面/柱面与一条直边。
单一的“曲面上的点”构成的自定义组合约束不能转换为约束连接。
自由度与冗余约束自由度(DOF)就是描述或确定一个系统(主体)的运动或状态(如位置)所必需的独立参变量(或坐标数)。
一个不受任何约束的自由主体,在空间运动时,具有6个独立运动参数(自由度),即沿XYZ三个轴的独立移动与绕XYZ三个轴的独立转动,在平面运动时,则只具有3个独立运动参数(自由度),即沿XYZ三个轴的独立移动。
主体受到约束后,某些独立运动参数不再存在,相对应的,这些自由度也就被消除。
当6个自由度都被消除后,主体就被完全定位并且不可能再发生任何运动。
如使用销钉连接后,主体沿XYZ三个轴的平移运动被限制,这三个平移自由度被消除,主体只能绕指定轴(如X轴)旋转,不能绕另两个轴(YZ轴)旋转,绕这两个轴旋转的自由度被消除,结果只留下一个旋转自由度。
冗余约束指过多的约束。
在空间里,要完全约束住一个主体,需要将三个独立移动与三个独立转动分别约束住,如果把一个主体的这六个自由度都约束住了,再另加一个约束去限制它沿X轴的平移,这个约束就就是冗余约束。
合理的冗余约束可用来分摊主体各部份受到的力,使主体受力均匀或减少磨擦、补偿误差,延长设备使用寿命。
冗余约束对主体的力状态产生影响,对主体的对运动没有影响。
因运动分析只分析主体的运动状况,不分析主体的力状态,在运动分析时,可不考虑冗余约束的作用,而在涉及力状态的分析里,必须要适当的处理好冗余约束,以得到正确的分析结果。
系统在每次运行分析时,都会对自由度进行计算。
并可创建一个测量来计算机构有多少自由度、多少冗余。
PROE的帮助里有一个门铰链的例子来讲冗余与自由度的计算,但其分析实丰有欠妥当,各位想准确计算模型的自由度的话,请找机构设计方面的书来仔细研究一番。