HALCON机器视觉课件全解只是分享
机器视觉系统原理及基础知识通用课件

包括处理速度、帧率等,用于评估机器视觉系统在处理图像和视频 时的速度和效率。
鲁棒性指标
包括光照变化、遮挡、噪声等干扰因素对系统性能的影响,用于评 估机器视觉系统在实际应用中的稳定性和可靠性。
不同场景下性能评估方法
实验室环境下性能评估
通过在标准数据集上进行测试和比较,评估机器视觉系统的基本性能和算法优劣。
量,提取关键信息。
特征提取与描述
02
通过手工设计特征提取算法,如SIFT、SURF等,对图像进行特
征提取和描述,为后续分类和识别提供基础。
分类与识别
03
利用分类器如SVM、K-means等对提取的特征进行分类和识别
,实现图像内容的理解和应用。
深度学习在机器视觉中应用
01
卷积神经网络(CNN)
通过构建深度卷积神经网络,自动学习图像中的特征表达,提高图像分
触发方式
软件触发、硬件触发等,应根据实际应用场景进 行选择。
04
机器视觉系统软件平台介绍
常见软件平台对比分析
OpenCV
开源计算机视觉库,提供丰富的图像处理与计算机视觉功能,支 持多种编程语言。
Halcon
商业机器视觉软件,提供强大的图像处理和机器视觉算法库,易于 集成到工业应用中。
VisionPro
学术社区
推荐了几个重要的机器视觉学术社区和论坛,如CVPR、 ECCV等会议以及GitHub等代码分享平台,便于研究者和 开发者交流与合作。
THANKS
感谢观看
案例:应用实例展示
图像处理实例
展示如何利用软件平台对图像进行预处理、特征提取、目标检测等操作。
机器视觉应用实例
展示如何结合具体的工业应用场景,利用软件平台实现自动化检测、识别、定 位等功能。
halcon 10.0介绍与入门资料

HALCON的方法
• OCR和OCV ➢ 来自不同应用领域的许多已经训练的字体保证了“即开即用”的最 高识别率;
• 摄像机标定 ➢ 通过几个内部和外部摄像机参数,即使有复杂的畸变,也可以精准 的将图像坐标系映射到实际的坐标系中; ➢ 例如在10mm的视野内,亚像素的测量精度可达1um;
HALCON的应用领域
• 食品、医疗保健和生命科学; • 汽车和机器人。三维数据提取,机器人路线规划; • 包装、印刷检测; • 医学图像分析。CT(计算机体层成像)、MR(核磁共振)、X射线等; • PCB、BGA、AOI,焊线等; • 完整性检测。焊点检测、二极管缺失等; • 定位、识别、匹配、校准; • 表面检测。如划痕、破洞、褶皱、杂质、污点等; • 质量管理。条形码、二维码检测; • 测量。1D、2D和3D测量
• HALCON Library – 包含所有版本方法和工具
• HDevEngine – 在你的应用程序中执行HDevelop程序
集成环境HDevelop
• 数据分析 • 数据检验
Halcon采集设备接口
建议资源选择
自动代码生成
集成环境HDevelop
交互创建模板
交互模板检测
交互参数优化
Besides manyintegrated tools for visualization, prototyping, parameter tuning, programmingand debugging, HDevelop additionallyoffers assistantsto manageevencomplextasks likeimage acquisition, calibrationand matchingwitha fewmouse clicksover anintuitiveGUI.
精品课件-HALCON数字图像处理-第10章 HALCON相关实例

2、基于表面的三维匹配 【例10.6】基于表面的三维匹配实例,如图所示。
(a)原图
(d)模型场景和关 键点的可视化
HALCON数字图像
(b)选择表面模(板c区)域待搜索图像
(e)基于表面模 板的3D匹配结果
10.5 图像拼接
图像拼接(image mosaic)技术是将一组相互间重叠
字符的识别主要包含两个部分,第一个部分:将图像中的单个 字符分割出来;第二个部分:将分割出来的字符进行分类。其中 字符识别主要由字符分割、特征提取、字符分类三部分组成。
HALCON数字图像
10.1 字符分割识别
【例10.1】字符识别实例如图10-1所示。 关键点: (1) 获取单个字符的区域region(具体依据情况使用图 像增强,区域分割) (2) 选取合适的字符库,使用分类器识别字符
(a)原图 边缘映射图
HALCON数字图像
(b)3D模型 (c)匹配结果及位姿显示图
2、基于表面的三维匹配
基于表面3D模型匹配一般由下面几步组成: (1)创建表面模型所需的3D对象模型
(2)从上面的3D对象模型创建表面模型 (3)访问代表搜索数据的3D对象模型 (4)使用表面模型在搜索数据中搜索对象 (5)销毁匹配结果的句柄、所有的3D对象模型和表 面模型
(b)
二维条形码识别及实例 1.二维条码定位及解码 不同码制的二维条码具有不同的特性,彼此具有不同的 寻像图形或定位图形,因此所采用的定位方法也有所不同。 以Data Matrix条码为例,其定位图形则是由构成L形的两 条黑实线进行定位。Data Matrix二维条码如图所示。
HALCON数字图像
HALCON数字图像
10.3 去雾算法
机器视觉系统原理及基础知识PPT

本PPT将介绍机器视觉系统的概述、图像处理基础、图像分割与边缘检测、形 态学处理、特征提取与描述、相机标定与几何变换、目标跟踪、机器学习在 机器视觉中的应用等。
机器视觉系统概述
机器视觉系统是指通过计算机对图像进行处理、分析和理解,模拟人类视觉 系统的功能和能力,用于实现自动检测、识别、测量等任务。
特征提取与描述
特征提取是从图像中提取出具有代表性的特征,如颜色、纹理、形状等,特征描述是对这些特征进行数学建模 和描述,用于图像匹配和识别。
相机标定与几何变换
相机标定是确定摄像机的内部和外部参数,几何变换是通过变换矩阵对图像 进行旋转、平移、缩放等操作,用于图像校正和重建。
目标跟踪
目标跟踪是指在连续图像序列中跟踪特定的目标物体,如运动物体或行人, 用于视频监控、无人驾驶等应用。
图像处理基础
图像处理是指对图像进行数字化处理,包括图像采集、图像预处理、图像增强、图像压缩等,用于提取和改善 图像的特征和质量。
图像分割与边缘检测
图像分割是将图像分割成不同的区域,边缘检测是提取图像中的边缘线条, 用于目标检测和图像理解等应用。
形态学处理
形态学处理是一种基于图像形状和结构的图像处理技术,通过腐蚀、膨胀、开运算、闭运算等操作,用于图像 滤波和形状分析。
ห้องสมุดไป่ตู้
机器学习在机器视觉中的应用
机器学习是一种通过训练数据和统计方法来构建模型和预测的方法,应用于 图像分类、目标检测、人脸识别等机器视觉任务。
精品课件-HALCON数字图像处理-第3章 HALCON图像处理基础

(1)褐色:控制和开发算子; (2)蓝色:图像获取和处理算子; (3)浅蓝色:外部函数; (4)绿色:注释。 HALCON数字图像
2、HALCON图像显示
1.图形窗口 默认的图形窗口尺寸为512*512,因此当图像尺寸不同时
显示在图像窗口上会变形,要看到无变形的图像的步骤为:菜 单栏>可视化>图像尺寸>适应窗口,即可自动调整窗口。
2.图像显示 HDevelop中显示图像通常使用dis_display算子,格式为: dev_display(Object:::)。 运行模式下运行算子时图形窗口会实时更新,如果只想通过图 像显示算子在图形窗口显示某些图像(image,region或xld) 就可以关闭窗口的更新。 3.显示文字 显示文字常用的disp_message算子与write_string 算子。
3.3 HALCON图像处理入门
1、HALCON图像读取 利用read_image算子读取图像 算子read_image(:Image:FileName:)中Image为读取的图
像变量名称,FileName为图像文件所在的路径,HALCON支 持多利种用图采像集格助式手。批量读取文件夹下所有图像
利用采集助手批量读取文件夹下所有图像的步骤为: 菜单栏>助手>打开新的Image Acquisition>资源>图像文 件>选择路径>代码生成>插入代码,选择文件夹路径如图。
HALCON数字图像
1、条件语句
机器视觉基础知识培训课件
FOV:100MM
500 象素
象素值 = 0.2 MM
实用精品PPT课件
43
七、机器视觉系统搭建
获得完美图象的6大要素
#1:高系统精度
• 视野(FOV) - 让视觉系统“关心”的部分尽可能“充满”视野。通俗来说,FOV越小越“好”。 - 相机分辨率相同视野越小系统精度越高 - 视野相同相机分辨率越高系统精度越高
实用精品PPT课件
51
七、机器视觉系统搭建
项目评估的基本步骤1:
检测项目 条款
检测项目条款 • 条款名称及详细说明
客户需求
系统精度 要求
系统速度 要求
系统工作 空间要求
系统精度要求
• 详细记录每项条款的精度 要求
系统速度要求
• 清楚了解整个系统的速度要求
• 对于设备制造商,还需要了解 整个设备的工作流程
三维深度信息
实用精品PPT课件
29
六、软硬件知识--光源篇 常用照明技术
#6:影子的利用——最不直接的测量
待测物高度信息
待测物长度信息
实用精品PPT课件
30
六、软硬件知识--光源篇 常用照明技术
#7:彩色的考虑
光
色
的
彩
三
三
原 色
原 色
光的三原色:红、绿、蓝;色彩三原色:青、紫、黄。 世界上所有颜色都是由三原色按不同比例组合而成 三原色的色光叠加为白光。如:日光 三原色的色彩叠加为黑色。
49
七、机器视觉系统搭建
小结
• #1:获得完美图象的6大要素及控制因素 高系统精度。控制因素:视野、相机分辨率。 清晰成象。控制因素:镜头、光源 避免畸变。控制因素:镜头 保持待测物体在成象中大小一致。控制因素:视野、拍照角度、待测物位置 反差最大化。控制因素:光源、镜头 恰当的照明与曝光。控制因素:光源、镜头
4-halcon简介教学课件
3/
Halcon介绍
halcon是德国慕尼黑MVTec公司开发的机器视觉软 件。1996年成立至今,只关注于机器视觉算法与软 件的研究与开发,是世界知名的视觉软件开发公司。
halcon源自学术界,它是由一千多个各自独立的函
数,以及底层的数据管理核心构成的一套图像处理
halcon的数据类型
• halcon的Image图像
*打开图像文件 read_image (Image,'E:/示例/例4-1.bmp') *得到图像的宽高信息 get_image_size (Image, Width, Height) *得到图像的数据类型 get_image_type (Image, Type) *得到图像的通道数,结果在控制变量Channels中 count_channels (Image, Channels) *将彩色图像分解为多个单通道图像 decompose3 (Image,ImageR,ImageG,ImageB) *将多个单通道图像合并为一个多通道图像 compose3 (ImageR, ImageG, ImageB, MultiChannelImage)
halcon的数据类型 • Tuple元组
Halcon中的Tuple元组与其他语言如C语言中的数组类似。
可以直接将Tuple理解为数组。其数据类型可以是int、 string等各种类型。
Tuple元组的索引值从0开始,最后一个索引是Tuple的 长度减去1。
Tuple有多个操作函数。包括基本的数学运算、指数与 对数运算、字符串运算、三角函数运算、位运算、比 较运算等。
机器视觉及应用
第四章halcon简介
主要内容
Halcon介绍
[课件]halcon 10.0介绍与入门PPT
![[课件]halcon 10.0介绍与入门PPT](https://img.taocdn.com/s3/m/6e006e5201f69e314332942e.png)
• 形态学
基于任意结构元素的腐蚀、膨胀、开运算和闭运算; halcon提供了最全面、最快速的形态学算法; • 条形码及二维码识别 halcon可以识别线宽小于1.5个像素的任意方向的标准条形码; 可以识别任意大小的ECC 200和QR码; 即使定位图形发生畸变,也可以识别出来;
HALCON的方法
描述符:对任意旋转和倾斜的目标尤为快速;
HALCON试用
– 申请评估license (到当月月底可用); – 把license文件拷贝至%HALCONROOT%\license目录下; – 打开hdevelop 运行示例程序或者 写您自己的程序 – 参考halcon ibrary 在如 Visual Studio的编程环境下编写程序;
图形 I/O
HALCON的特点
HALCON是什么
是一款全功能的机器视觉软件包,提供原型化的集成开发环境,用户可 以灵活地搭建自己的机器视觉系统。
特点和优势:
它以最新的计算机图像处理和计算机视觉技术为基础; 世界最受欢迎的独立于硬件的机器视觉软件产品; 强大的集成开发工具HDevelop,节约程序开发时间; 世界上最全面的机器视觉处理软件,所有图像处理功能在halcon中都可 以找到对应的开发库; 为低、中、高阶图像处理提供将近1,500个函数、900多个例程; 支持最流行的图像采集设备: analog, digital, DirectShow, IEEE1394, Ethernet, 及USB;
支持的编程语言包括:C, C++, C#, Visual Basic, Delphi;
兼容Linux, UNIX, 和Windo100 x 100模板的基于形状的匹配, 搜索区域为360°旋转的全图 3.2 ms 仿射变换(最近邻插值法)0.6 ms Sobel边缘滤波0.6 ms 中值(3 x 3) 0.4 ms 二项滤波(5 x5) 0.8ms 灰度值开运算(3 x 3) 0.3ms 膨胀, 以50 x 50的正方形结构元素0.1 ms 腐蚀, 以50 x 50的正方形结构元素0.04 ms 阈值化操作0.1 ms 亚像素阈值分割1.1 ms 250 个目标区域的特征分析(blobs 重心和像素数)0.04 ms 亚像素级的边缘测量(100 x 20)0.01 ms 快速傅立叶变换4.3 ms 测试环境:3 GHz Intel双核, 图像尺寸: 640 x 480
精品课件-工业机器视觉技术及应用-第8章

第八章 机器视觉应用案例 上述程序已测试成功,如图8-7所示。
图8-7 相机测试成功界面
第八章 机器视觉应用案例
第四步,连接相机。 (1) 设置主程序入口。打开Program.cs,添加相机库函 数(using ),并添加如下代码,以实现正确引导。 (2) 实例化一个相机。在Form_Main.cs中 public partial class Form_Main : Form的第一行上加入代码:
显示输入输出控件属性为: Name(XPU_LV_ListViewMessage)、View(Details)、 HeaderStyle (NonClickable)、Dock(Fill)、集合 (Name(ColumHeader)、Text(详细)(ListViewDevice)。
第八章 机器视觉应用案例
image. */ }
第八章 机器视觉应用案例 ② 在按钮事件代码之前首先编写XPU_OneShot函数:
第八章 机器视觉应用案例
③ 在Form_Main()函数中注册: ④ 实现相机设备基本代码。基本代码包括:
· XPU_OnGrabErrorEventCallback代码: · XPU_OnDeviceRemovedEventCallback代码: · XPU_OnDeviceOpenedEventCallback代码: · XPU_OnDeviceClosedEventCallback代码: · XPU_OnGrabbingStartedEventCallback代码: · XPU_OnGrabbingStoppedEventCallback代码: · XPU_OnImageReadyEventCallback代码:
《HALCON机器视觉》课件

欢迎来到《HALCON机器视觉》PPT课件!本课程将带领您深入了解HALCON机 器视觉的魅力和应用。
HALCON机器视觉的介绍
HALCON是一款强大的机器视觉软件工具,提供广泛的视觉分析和处理功能, 可解决各种现实世界中的图像和视频问题。
HALCON机器视觉的应用场景
通过深度学习算法的应用, 进一步提升机器视觉的智 能和准确性。
结合机器视觉和增强现实 技术,创造更多智能、交 互式的应用场景。
ห้องสมุดไป่ตู้
3 移动端应用
随着智能手机和平板电脑 的普及,HALCON机器视 觉将在移动端应用迎来更 广阔的发展。
HALCON机器视觉在制造业、医疗健康、安防监控、自动化等领域中具有广泛的应用,帮助提高生产效率和质 量。
HALCON机器视觉的基本概念
1 机器视觉
通过计算机和摄像机等设备模拟人类视觉进行图像分析和处理。
2 图像处理
使用算法对图像进行增强、滤波、分割、检测等操作,以提取目标特征。
3 目标识别
根据已学习的模型,在图像中识别和定位特定的目标。
HALCON机器视觉的主要功能
图像分割
将图像分割为不同的区域,便于后续的目标识别 和图像分析。
形状匹配
根据目标物体的形状特征,寻找最匹配的模板, 并进行匹配度评估。
特征提取
通过提取图像中的关键特征,实现目标物体的识 别和分类。
3 D视觉
通过多个图像视角来还原物体的三维结构和形状 信息。
HALCON机器视觉的实现步骤
制造业质量控制
HALCON可用于在制造业中进行 质量控制和缺陷检测,提高产品 质量和生产效率。
医疗影像处理
halcon知识点
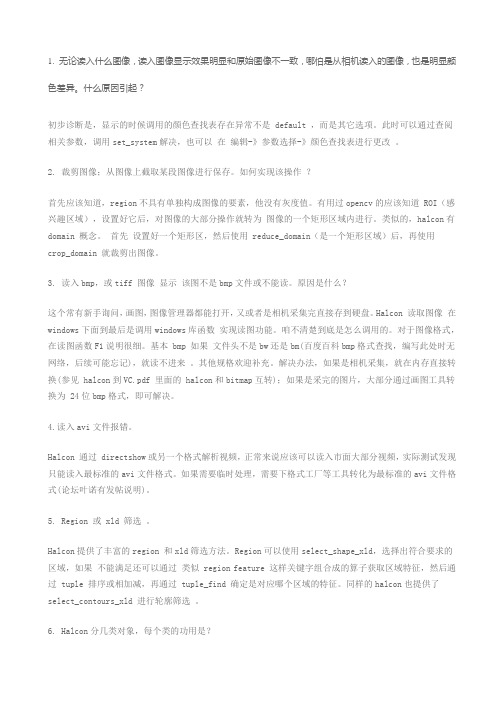
1. 无论读入什么图像,读入图像显示效果明显和原始图像不一致,哪怕是从相机读入的图像,也是明显颜色差异。
什么原因引起?初步诊断是,显示的时候调用的颜色查找表存在异常不是 default ,而是其它选项。
此时可以通过查阅相关参数,调用set_system解决,也可以在编辑-》参数选择-》颜色查找表进行更改。
2. 裁剪图像;从图像上截取某段图像进行保存。
如何实现该操作?首先应该知道,region不具有单独构成图像的要素,他没有灰度值。
有用过opencv的应该知道 ROI(感兴趣区域),设置好它后,对图像的大部分操作就转为图像的一个矩形区域内进行。
类似的,halcon有domain 概念。
首先设置好一个矩形区,然后使用 reduce_domain(是一个矩形区域)后,再使用crop_domain 就裁剪出图像。
3. 读入bmp,或tiff 图像显示该图不是bmp文件或不能读。
原因是什么?这个常有新手询问,画图,图像管理器都能打开,又或者是相机采集完直接存到硬盘。
Halcon 读取图像在windows下面到最后是调用windows库函数实现读图功能。
咱不清楚到底是怎么调用的。
对于图像格式,在读图函数F1说明很细。
基本 bmp 如果文件头不是bw还是bm(百度百科bmp格式查找,编写此处时无网络,后续可能忘记),就读不进来。
其他规格欢迎补充。
解决办法,如果是相机采集,就在内存直接转换(参见 halcon到VC.pdf 里面的 halcon和bitmap互转);如果是采完的图片,大部分通过画图工具转换为 24位bmp格式,即可解决。
4.读入avi文件报错。
Halcon 通过 directshow或另一个格式解析视频,正常来说应该可以读入市面大部分视频,实际测试发现只能读入最标准的avi文件格式。
如果需要临时处理,需要下格式工厂等工具转化为最标准的avi文件格式(论坛叶诺有发帖说明)。
5. Region 或 xld 筛选。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
判断前三位,如果为win 则为windows操作系统
设置字体,格式为:-FontName-Height-Width-ItalicUnderlined-Strikeout-[Bold-][CharSet-]
以-作为开始和结束
下划线
粗体
第二步:确立矩形框,设定ROI
以矩形两条中心轴交点作为原点, 与X轴形成的角度
显示矩形ROI
计算数组元素的个数
显示边缘线
数值的显示位置大小的设定
计算得出边缘线条的起始点和结 束点
设定显示的颜色,宽度,并显示
由于窗体 被缩放, 所以需要 重新确定 位置 从该指令中的出的字 体大小为按照文本窗 口的像素大小设定的
在适当的位置显示数值
获取当前图像的起始坐标点和 结束坐标点
提取边缘最近的点作为参考像 素
中心点的行
坐标
中心点的列坐 标
测得的图像窗 口宽和高
功能:为取得一 垂直于矩形中心
中心轴角度 主轴半径
轴的边缘直线
输出图像的窗口代 码
第三步:根据设定的参数进行测量
高斯平滑滤波器中的参数 灰度门槛值 返回所有边缘对,如果设定为last则只回最后一对, 如果为first则只回第一对
获取窗体的信息,按照无放大缩小的 像素进行测量
得出缩放前后的比 例
功能:获取文本显示 所需要的范围大小
需要显示的文本信息
文本显示有一个基 准线,Ascent为上 升值,Descent为下 降值,加起来便是 高
正常显示文本所需要 的宽和高
得出在图像中显示所需 大小
显示字符串
文本左上脚的坐标, 以一个大写字母为 依据
功能为设置文本放置的位 置
显示边缘,管脚宽度和相互之间的 距离
Thank you!
此课件下载可自行编辑修改,仅供参考! 感谢您的支持,我们努力做得更好!谢谢
HALCON机器视觉课件全解
第一步:读入图片并初始化项目
读入图像
获取图像信息:返 回宽度,和高度
设置系统字体
创建大小适合 的窗体
初始化
If语句表达方式
如果为0则,设 按比例缩小
设置系统显示字体
获取操作系统名称,放入OS
*则为系统默认,1为确认,
0为否定
斜体
提取到的边缘只返回主轴上的单个点,放入到AmplitudeFirst和 AmplitudeSecond当中。IntraDistance为一个数组,返回每对边缘的距离, InterDistance也为一个数组,返回每连续对边缘的距离。
第四步:使测量结果可视化
显示图像 用边缘线条显示 画出该矩形
显示出测量的边缘线条和结果(包括引脚的宽度和距离)
得出一垂直与矩形中心轴线的边缘直线
功能:提供一垂直于矩形中心轴线的边缘直线, 为Transition为“positive” 则当边缘灰度值由黑到白转变时,矩形主轴的位置将返回到RowEdgeFirst 和ColumnEdgeFirst中,当边缘灰度值由白到黑转变时,矩形主轴的位置 将返回到RowEdgeSecond和ColumnEdgeSecond中,如果为“negative”则 情况恰好相反。