信号时序知识
时序信号分类

时序信号分类
时序信号是一种按照时间顺序排列而形成的信号,其特点是具有明显的时域特性。
时序信号通常是由模拟信号转换得到的数字信号,包括连续时间信号和离散时间信号。
时序信号分类是指将时序信号按照其特征或用途进行分类。
常见的时序信号分类包括以下几类:
1. 周期信号:周期信号是指在一定时间段内重复出现的信号,比如正弦波和方波等。
2. 非周期信号:非周期信号是指没有重复周期的信号,比如随机信号和脉冲信号等。
3. 有限长度信号:有限长度信号是指在一段时间内存在的信号,比如信号的开始和结束均有限制的语音信号。
4. 稳态信号:稳态信号是指在稳态条件下存在的信号,比如交流电压信号和稳定的机械振动信号等。
5. 非稳态信号:非稳态信号是指在非稳态条件下存在的信号,比如启动电动机时的信号和瞬态信号等。
时序信号分类在信号处理、通信、控制等领域中具有广泛的应用,对于理解和分析时序信号的特性和行为具有重要意义。
- 1 -。
I2C总线信号时序总结

I2C总线信号时序总结I2C(Inter-Integrated Circuit)总线是一种串行通信协议,它用于在集成电路之间进行短距离的数据交换。
I2C总线信号时序对于正确实现I2C通信非常重要。
本文将详细总结I2C总线信号时序,包括起始条件、数据传输、停止条件等。
1.总线状态2.起始条件起始条件是指从I2C主设备(Master)向I2C从设备(Slave)发送数据之前的一系列信号。
起始条件由两个信号组成:SCL(时钟)和SDA(数据)。
当SCL为高电平时,SDA发生一个下降沿,表示开始传输数据。
3.数据传输在数据传输阶段,数据位通过SCL时钟控制的边缘传输。
这个过程类似于同步串行通信协议。
数据的传输在I2C总线上是以字节为单位进行的,每个字节有8位(bit)。
数据传输过程中,SCL和SDA的状态发生变化的规则如下:-当SCL为低电平时,数据线SDA可以发生变化。
此时SDA数据线的电平变化将被忽略。
-当SCL为高电平时,SDA数据线的电平变化将被读取或写入。
4.读取数据在I2C总线上进行数据读取时,接收设备通常在时钟的上升沿读取数据。
主设备将在SCL为高电平时将数据传输到SDA数据线上。
而从设备将在SCL下降沿读取数据。
5.写入数据在I2C总线上进行数据写入时,发送设备通常在时钟的下降沿写入数据。
主设备在SCL为高电平时,将数据传输到SDA数据线上。
从设备将在SCL下降沿写入数据。
6.停止条件停止条件是指在I2C通信完成后,由主设备发送的一系列信号。
停止条件由两个信号组成:SCL(时钟)和SDA(数据)。
当SCL为高电平时,SDA发生一个上升沿,表示结束传输。
对于I2C总线信号时序的更详细说明可以如下:-在起始条件中,SCL先于SDA变为高电平。
SDA变化的任何时间必须在SCL变高之前完成。
起始条件的结束是在SCL为高电平时,SDA发生一个下降沿。
-在数据传输阶段,数据的传输是由主设备控制的,每个字节8位。
信号时序逻辑
信号时序逻辑
信号时序逻辑是一种数字电路的设计方法,它的功能和普通逻辑电路类似,但它还包括了对时间序列的操作。
在信号时序逻辑中,数据在电路中流动的过程是同步的,并且它们的状态就像是在一个钟表上运动一样。
信号时序逻辑是通过使用时钟信号来控制数字电路的行为的。
信号时序逻辑可以用于设计各种数字电路,从简单的逻辑门到复杂的计数器和状态机。
它也常用于数字信号处理和通信领域中的设计。
比如,一个完成数据存储和读取的存储器可以使用时序逻辑进行设计。
在信号时序逻辑中,时钟信号被用来同步电路中的所有操作。
当时钟信号的边沿发生变化时,所有的电路元件都会根据它们配置的逻辑和数据输入进行计算和操作。
这种同步方式可以保证数字电路的稳定和可靠性。
信号时序逻辑的主要优点是它可以快速而准确地进行数据处理,且设计比较容易理解和实现。
缺点是它需要严格的时序控制,因此需要使用合适的时钟信号源和时序生成器,以确保设计的正确性。
笔记本上电时序及信号讲解
Page 7
时序
在+V1.5S电压稳定之后,U9(TPS51124)会发出V1.5S_PG,这个 电是用来开启+VCCP的.从下图可以看出,只有左下角的电压都 正常,才能发出PWR_GOOD_3,图左上角显然也是调 PWR_GOOD_3和PWR_GOOD_KBC之间时序的,D1003在这 里的作用是在POW_GOOD_3关电时将它的电快速放掉,防止 U2误动作.
Page 10
时序
如下图所示,在SB_3S_VRMPWRGD(VRM Power Good)和 PM_PWROK (Power ok)电压high起来1ms后,SB才会发出 PLT_RST# (Platform reset).在这1ms内PLT_RST#为低,而正是 由于这1ms的低有效,系统才识别到PLT_RST#.该信号会对 SIO,FWH,LAN,G(MCH),IDE,TPM等进行reset的动作.也就是说 如果该信号异常,这些device都没办法被激活.该信号发出后立刻 就会发出PCI_3S_RST#,可以当做是作用相似的第二次reset.
Page 12
S0~S5~S0时序表
下图是SB的S0~S5~S0时序表,里面所有信号的特性和定义在 ICH7的Datasheet里面都有很详细的描述,这里就不多说了. 这个时序表对于“系统不能休眠”和“系统休眠后不能唤醒”的主板 非常有用(对于不能开机和系统自动开关机的主板也同样有效). 分析的时候,只需要找出哪个信号异常,就可以找到问题点,当然, 还有一种特殊的情况,就是有两个(或多个)信号时序出现了问题, 这种情况在主板设计的初期可能会遇到,实际运用中导致这种现 象的情况以SB不良居多,当然,首先应该排除BIOS的可能,因为 其中有些的信号时序在BIOS是可调的,这点在设计初期也常被 运用来解决一些问题,简单经济实用.
时序信号特征
时序信号特征
一、引言
时序信号是指在时间上有序排列的信号,它可以是连续的也可以是离散的。
时序信号特征的研究对于信号处理、模式识别等领域具有重要意义。
本文将从时序信号的时域特征、频域特征和统计特征三个方面进行探讨。
二、时域特征
时域特征是指信号在时间轴上的表现特点,常用的时域特征包括振幅、周期、脉冲宽度等。
振幅是指信号的最大幅值,可以反映信号的能量大小。
周期是指信号重复出现的时间间隔,可以帮助我们了解信号的重复性。
脉冲宽度是指脉冲信号的持续时间,可以用来描述信号的时长。
三、频域特征
频域特征是指信号在频率域上的表现特点,常用的频域特征包括功率谱密度、频率分布等。
功率谱密度反映了信号在不同频率上的能量分布情况,可以用来分析信号的频谱特征。
频率分布是指信号在不同频率上的出现概率,可以帮助我们了解信号的频率分布规律。
四、统计特征
统计特征是指对信号进行统计分析得到的特征,常用的统计特征包括均值、方差、偏度、峰度等。
均值是指信号的平均值,可以反映
信号的中心位置。
方差是指信号的离散程度,可以用来描述信号的波动性。
偏度是指信号分布的偏斜程度,可以帮助我们了解信号的分布形态。
峰度是指信号分布的尖锐程度,可以用来描述信号的峰值特性。
五、总结
时序信号特征的研究对于信号处理和模式识别具有重要意义。
时域特征、频域特征和统计特征是对时序信号进行分析的重要手段。
通过对时序信号特征的研究,可以更好地理解信号的特性,并为后续的信号处理和模式识别提供参考依据。
希望本文对读者在理解和应用时序信号特征方面有所帮助。
电子电路中的时序问题解析
电子电路中的时序问题解析时序问题是电子电路中常见的一类问题,涉及到信号在电路中的传输和处理的时间序列。
解决时序问题对于电子电路的设计和性能优化至关重要。
本文将介绍时序问题的基本概念和解决方法。
1. 时序问题的定义和分类在电子电路中,时序问题指的是信号的时序关系在电路中是否能够满足要求。
时序问题可以分为两大类:同步时序问题和异步时序问题。
同步时序问题是指信号的时钟周期和延时能否满足要求,而异步时序问题是指信号的到达时间和处理时间的差异是否会导致错误。
2. 同步时序问题的解决方法同步时序问题主要通过时钟周期和延时的设计来解决。
首先,需要确定系统的时钟频率和时钟周期。
然后,根据时序要求,设计各个模块的延时电路,以确保信号在正确的时间到达目标模块。
此外,还需要考虑时钟的稳定性和抖动问题,以减小时序误差的影响。
3. 异步时序问题的解决方法异步时序问题是较为复杂的问题,通常需要进行时序分析和处理器设计。
时序分析可以通过建模和仿真工具来实现,以预测信号的到达时间和处理时间之间的差异。
在处理器设计中,需要采取一些措施来解决时序问题,如插入延时元件、使用同步信号等,以确保信号的稳定传输和正确处理。
4. 时序问题的优化和调试在电子电路设计中,时序问题的出现可能会导致电路性能下降甚至故障。
因此,需要进行优化和调试以解决时序问题。
优化方面,可以采用时序约束和布线技巧来改善时序性能。
调试方面,可以通过时序分析、波形查看和逻辑分析等方法来诊断和修复时序错误。
5. 时序问题的注意事项在解决时序问题时,需要注意以下几个方面。
首先,需要明确时序要求,包括时钟频率、延时限制等。
其次,要充分了解设备和模块的特性,以便合理设计时序电路。
此外,需要进行充分的验证和测试,以确保电路在不同工作条件下都能满足时序要求。
最后,需要及时跟踪和解决时序问题,以避免问题的扩大和影响整个电路系统。
综上所述,电子电路中的时序问题是一个重要的设计和优化问题。
笔记本上电时序及信号讲解
Page 14
VGA&VRAM
既然VRAM是存放显示数据的地方,那么,当VRAM出现问题的时候,系统肯定 是不能正常显示的(主要是花屏),不过,问题点却有很多种. 1.VRAM本身的问题;不能正常储存数据,数据会丢失或者处理错误,都会出问 题; 2.VRAM电压和clock不正常(特别是参考电压);这点很容易理解, 电路中 传输的数据都是以0和1的二进制代码存在,而都必须以参考电压为参考,如果 参考电压不准确,显然,数据会失真,导致显示问题是必然的; 3.VGA的问题;包 括VGA本身的问题和VGA的周边电压和clock,特别是负责VRAM模块的参考 电压,白屏现象多是由VGA不良导致的; 4.VBIOS(这种现象非常少见,但个人 认为最好首先排除); 5.断线当然也是一种可能,但是这种情况几乎可以排除 在考虑之外,因为断线的主板实在太少. 有些机种VRAM多的时候有8颗,要找出哪颗出了问题是很头疼的问题,不过 幸运的是,ATI生产的每一种不同型号的VGA都有对应的检查软件,可以帮助 我们找出哪一组VRAM(主板上VGA只有AB两个64位的channel,该软件将AB 各分成两个channel(0~31;32~64),所以软件上显示为ABCD四组,每组分别对 应一对VRAM)出现了问题,条件是必须在DOS模式下运行.(以Vail为例)
Page 7
时序
在+V1.5S电压稳定之后,U9(TPS51124)会发出V1.5S_PG,这个 电是用来开启+VCCP的.从下图可以看出,只有左下角的电压都 正常,才能发出PWR_GOOD_3,图左上角显然也是调 PWR_GOOD_3和PWR_GOOD_KBC之间时序的,D1003在这 里的作用是在POW_GOOD_3关电时将它的电快速放掉,防止 U2误动作.
rnn 时序信号分类
rnn 时序信号分类RNN(循环神经网络)是一种能够处理时序数据的神经网络模型,它在时序信号分类方面有着广泛的应用。
时序信号分类是指对于输入的时序数据进行分类,例如识别语音信号、手写字体识别、股票走势预测等。
RNN在这方面的应用非常广泛,下面我会从多个角度来解释RNN在时序信号分类中的应用。
首先,RNN能够处理变长的时序数据,这使得它非常适合处理语音信号、文本数据等变长的时序信号。
RNN通过循环神经元的结构,能够记忆先前的信息,并将这些信息应用到当前的输入中,这使得它能够更好地捕捉时序数据中的长期依赖关系,从而提高了时序信号分类的准确性。
其次,RNN还可以结合其他的神经网络结构,比如长短时记忆网络(LSTM)和门控循环单元(GRU),这些结构能够更好地解决RNN在处理长序列时出现的梯度消失和梯度爆炸的问题,从而提高了模型的泛化能力和准确性。
另外,RNN还可以通过堆叠多层网络来提高模型的表达能力,这样可以更好地学习复杂的时序模式,从而提高时序信号分类的准确性。
同时,可以使用双向RNN来捕捉时序数据中前后依赖关系,进一步提高分类的准确性。
除此之外,RNN还可以结合注意力机制来提高模型对时序数据的关注度,从而提高分类的准确性。
通过引入注意力机制,模型可以更加集中地关注时序数据中重要的部分,从而提高分类的准确性。
总的来说,RNN在时序信号分类中的应用是非常广泛的,它通过其循环的结构和记忆能力,能够更好地捕捉时序数据中的长期依赖关系,结合其他的神经网络结构和注意力机制,可以进一步提高分类的准确性。
希望这些信息能够帮助你更好地理解RNN在时序信号分类中的应用。
时序信号的概念和功能

时序信号的概念和功能时序信号是指在时间上有规律的信号,它们在电子电路中起着非常重要的作用。
时序信号可以分为周期性信号和非周期性信号两种。
周期性信号是指在一定时间内重复出现的信号,如正弦波、方波等。
这种信号在电子电路中的应用非常广泛,例如在数字电路中,时钟信号就是一种周期性信号,它用于同步各个部件的工作,确保它们按照正确的顺序和时间完成任务。
在通信领域中,周期性信号也被广泛应用,例如调制解调器中的载波信号就是一种周期性信号。
非周期性信号则是指在时间上没有规律的信号,如噪声、脉冲等。
这种信号在电子电路中的应用也非常广泛,例如在数字电路中,非周期性信号可以用于触发器的触发,从而实现各种逻辑功能。
在通信领域中,非周期性信号也被广泛应用,例如在雷达中,脉冲信号可以用于探测目标的距离和速度。
时序信号的功能非常重要,它们可以用于同步各个部件的工作,确保它们按照正确的顺序和时间完成任务。
例如在数字电路中,时钟信号可以用于同步各个部件的工作,确保它们按照正确的顺序和时间完成计算任务。
在通信领域中,时序信号也被广泛应用,例如在调制解调器中,时钟信号可以用于同步发送和接收数据的时序,确保数据的正确传输。
此外,时序信号还可以用于控制电子电路的工作。
例如在数字电路中,非周期性信号可以用于触发器的触发,从而实现各种逻辑功能。
在通信领域中,非周期性信号也被广泛应用,例如在雷达中,脉冲信号可以用于控制雷达的发射和接收时序,从而实现目标探测和跟踪。
总之,时序信号在电子电路和通信领域中起着非常重要的作用,它们可以用于同步各个部件的工作,控制电子电路的工作,实现各种逻辑功能,确保数据的正确传输等。
因此,对于电子工程师和通信工程师来说,掌握时序信号的概念和功能是非常重要的。
具有时钟信号时序分析技巧

没有片选 信号线 的总线分 析 , “ 用 通
CLK分 析组 件 ” 提 供 了 “ K超 时 ” CL
远电子有限公司 ,为采用具有时钟信号 非标准协议分析所推 出的一款辅助解码
分 析组 件 。其设 置 界面 如 图 l该 设 置 标 志 了如 果 CLK 号 当 信 出现 某 个 时钟 超 出该 设 置 的时 间 则表示 D T A A信号 线 上 的数 据无 效 。 现 实 开 发 中 有 许 多总 线 并 非 数 据 开 始 后 立 即 采 集数 据 ,它们 存 在 1 个或 者 多个时 钟 延迟 ,为此 “ 用 C K分析 通 L 组 件 ”提 供 了 “ 始 后 数 据 延 迟 Bi” 开 t 设置 ,实现 对该 类 型功 能 的适 应 。
协 议 都 有 时 钟 信 号 。广 州 致 远 电 子 有 限 公 司 的 逻 辑 分 析 仪 软 件 为 方 便 客 户 推 出 了 “ 用 CLK 线 分 析 ” 帮 助 用 通 总 户 分 析 具 有 CL K总 线 的数 据 ,本 篇 章
下保 持高 电平 ,传输 数据 0 时就 把数
或者高 电平标志着Da a t 总线有效 。同
时 “ 用 CLK分 析 组 件 ” 还 支 持 “ 通 边 沿 ” 模 式 ,即 CS 号 发 生 改 变 时 代 表 信 新 数 据 的 开 始 ,3 I 总 线 。  ̄I nS 很 多具 有 时 钟 信 号 的 总 线 中 也 存 在 一 定 的 协 议 不 存 在 CS 号 线 , 如 信 IC S 等 。他们 通过 信 号线 的停 止 和 I 、P 2
待 发 送 数 据 时 ,首 先 检 查 以 确 认 是 否
( DATA信号线 )和时钟总线 ( K CL 信 号线 )外 ,一般还 有一条 用于标志
ddr3 标准时序
ddr3 标准时序DDR3标准时序。
DDR3是一种电脑内存标准,它采用了高速的时序设计,以实现更快的数据传输速度。
在本文中,我们将深入探讨DDR3标准时序的相关知识,包括时序参数的意义、常见的时序设置以及时序优化的方法。
首先,我们需要了解DDR3时序参数的含义。
时序参数是指内存模块在进行读写操作时,各种信号的时序要求。
这些参数包括CAS延迟(CL)、RAS到CAS延迟(tRCD)、预充电时间(tRP)、行前置时间(tRAS)等。
这些参数的设置直接影响着内存的性能和稳定性。
接下来,我们来看一些常见的DDR3时序设置。
在实际应用中,我们通常会遇到一些常见的时序设置,比如CL9-9-9-24、CL11-11-11-30等。
这些数字分别代表了CAS延迟、RAS到CAS延迟、预充电时间和行前置时间。
一般来说,时序参数越小,内存的性能就越好,但也会增加内存稳定性方面的挑战。
除了常见的时序设置外,我们还可以通过一些方法来优化DDR3的时序。
例如,可以通过提高内存电压来改善内存稳定性,从而允许更加激进的时序设置。
此外,还可以通过超频技术来提高内存时序的性能,不过这需要谨慎操作,以免损坏硬件或降低系统稳定性。
总的来说,DDR3标准时序对于内存的性能和稳定性至关重要。
合理的时序设置可以提高内存的读写速度,从而提升整个系统的性能。
然而,过于激进的时序设置可能会导致内存稳定性问题,甚至损坏硬件。
因此,在设置DDR3时序参数时,需要权衡性能和稳定性,选择合适的时序设置,并且谨慎进行时序优化。
综上所述,DDR3标准时序是内存性能优化中至关重要的一环。
合理的时序设置和优化可以提升系统性能,但需要谨慎操作,以免影响系统稳定性。
希望本文对于DDR3标准时序的理解能够帮助读者更好地应用和优化内存,提升系统性能。
altera fifo异步清零信号的时序

altera fifo异步清零信号的时序一、引言在数字电路设计中,FIFO(First In First Out)是一种常见的数据缓冲器,用于解决不同速度的数据传输之间的数据流失问题。
Altera是一家知名的FPGA芯片制造商,其FIFO模块提供了异步清零信号来实现清空缓冲区的功能。
二、FIFO异步清零信号的定义FIFO异步清零信号是一种特殊的控制信号,用于将FIFO缓冲区中的数据全部清空。
当该信号被激活时,FIFO模块会将缓冲区中的数据全部丢弃,并将指针重置为初始状态。
三、FIFO异步清零信号的工作原理FIFO异步清零信号的工作原理如下:1. 当FIFO异步清零信号被激活时,FIFO模块会检测到该信号的变化。
2. FIFO模块会立即停止写入数据和读取数据的操作,并将指针重置为初始状态。
3. FIFO模块会将缓冲区中的数据全部丢弃,不再进行任何处理。
4. FIFO异步清零信号被取消激活后,FIFO模块会恢复正常的读写操作。
四、FIFO异步清零信号的时序特性FIFO异步清零信号的时序特性如下:1. 异步清零信号可以随时激活,无需与其他信号同步。
2. 异步清零信号的激活时间和激活持续时间可以根据设计要求进行调整。
3. FIFO模块在接收到异步清零信号后会立即响应,无需等待时钟信号。
4. 异步清零信号的取消激活时间可以根据设计要求进行调整。
5. 异步清零信号的取消激活时间应保证足够长,以确保FIFO模块完全恢复正常操作。
五、FIFO异步清零信号的注意事项在使用FIFO异步清零信号时,需要注意以下几点:1. 异步清零信号的激活和取消激活应遵循设计规范,不得出现脉冲信号或持续激活导致异常操作。
2. 异步清零信号的激活和取消激活时间应考虑到FIFO模块的响应时间和恢复时间,避免信号过短或过长导致操作不稳定。
3. 在设计中,应考虑到异步清零信号与其他控制信号的相互作用,避免冲突或误操作。
六、总结FIFO异步清零信号是一种重要的控制信号,用于清空FIFO缓冲区中的数据。
GMII,RGMII,SGMII,TBI,RTBI接口信号及时序介绍

GMII,RGMII,SGMII,TBI,RTBI接⼝信号及时序介绍简介MII是英⽂Medium Independent Interface的缩写,翻译成中⽂是“介质独⽴接⼝”,该接⼝⼀般应⽤于以太⽹硬件平台的MAC层和PHY层之间,MII接⼝的类型有很多,常⽤的有MII、RMII、SMII、SSMII、SSSMII、GMII、RGMII、SGMII、TBI、RTBI、XGMII、XAUI、XLAUI等。
下⾯对它们进⾏⼀⼀介绍。
MII接⼝:RXD(Receive Data)[3:0]:数据接收信号,共4根信号线;TX_ER(Transmit Error): 发送数据错误提⽰信号,同步于TX_CLK,⾼电平有效,表⽰TX_ER有效期内传输的数据⽆效。
对于10Mbps 速率下,TX_ER不起作⽤;RX_ER(Receive Error): 接收数据错误提⽰信号,同步于RX_CLK,⾼电平有效,表⽰RX_ER有效期内传输的数据⽆效。
对于10Mbps 速率下,RX_ER不起作⽤;TX_EN(Transmit Enable): 发送使能信号,只有在TX_EN有效期内传的数据才有效;RX_DV(Reveive Data Valid): 接收数据有效信号,作⽤类型于发送通道的TX_EN;TX_CLK:发送参考时钟,100Mbps速率下,时钟频率为25MHz,10Mbps速率下,时钟频率为2.5MHz。
注意,TX_CLK时钟的⽅向是从PHY侧指向MAC侧的,因此此时钟是由PHY提供的。
RX_CLK:接收数据参考时钟,100Mbps速率下,时钟频率为25MHz,10Mbps速率下,时钟频率为2.5MHz。
RX_CLK也是由PHY侧提供的。
CRS:Carrier Sense,载波侦测信号,不需要同步于参考时钟,只要有数据传输,CRS就有效,另外,CRS只有PHY在半双⼯模式下有效;COL:Collision Detectd,冲突检测信号,不需要同步于参考时钟,只有PHY在半双⼯模式下有效。
VBO时序信号DE、Hsync、Vsync的注意要点

VBO时序信号DE、Hsync、Vsync的注意要点
一、背景
有些TCON IC处理VBO信号时需要用到Hsync、Vsync信号,有些仅需要DE信号即可,目前常用的是仅需要DE信号。
在TCON IC需要Hsync、Vsync信号的情况下,主芯片与TCON IC可能因为Hsync、Vsync 信号极性设置不同导致的不匹配问题,对于默认两分区的面板,在各分区的开始区域会产生若干列连续的画异竖线。
因此对于新方案的TCON IC需要注意Hsync、Vsync信号的极性。
二、DE、Hsync、Vsync信号规格
下图为规格书中信号规格,要求DE信号必须为高电平有效,Hsync、Vsync信号可以为高电平有效也可为低电平有效,可按照需求进行设定。
目前整机使用的MSTAR主芯片方案,默认设置为Hsync、Vsync高有效,不支持Hsync、Vsync低有效。
三、注意事项
鉴于目前整机主芯片存在Hsync、Vsync信号不支持低电平有效的缺陷,对于新方案的TCON IC,在解析VBO信号需要Hsync、Vsync信号时,可参照以下VBO信号时序图:
注意要点:
1、确认TCON IC的Hsync、Vsync信号极性是否与整机可支持的极性相匹配;
2、确认整机发出的Hsync、Vsync与DE信号的时序关系要满足TCON IC的要求(上图中的HFP,HPW,HBP,VFP,VPW,VBP时间都有要求)。
电脑AMD芯片组时序信号解释

AMD芯片组时序信号解释:VBAT:RTC电路的供电,3V(RTC电路有问题会导致没复位或不跑码等故障)RTC clock in:晶振起振给南桥提供32.768KHz频率(RTC电路有问题会导致没复位或不跑码等故障)+3.3V_S5:南桥主待机电压,3.3V+1.2V_S5:南桥第二个待机电压,有的是1.2V,有的是1.1V,AMD单桥也是1.1VRSMRST#:南桥待机电压好,3.3VPWR_BTN#:电源开关触发后,最终送达南桥的触发信号,高低高的脉冲WAKE#:唤醒信号,通常来自于网卡芯片,作用类似于PWR_BTN#SLP_S5#:南桥发出的退出关机状态的信号,3.3V,用于控制内存供电产生SLP_S3#:南桥发出的退出睡眠状态的信号,3.3V,用于控制所有的S0电压产生ALL power rails:所有电源被开启,包括内存供电、桥供电、VDDA供电、CPU供电、总线供电(单桥无此供电)等System clocks(单桥由桥内部完成):时名钟芯片开始开作PCIE_RCLKP/N(单桥此信号不采用):时钟芯片送给南桥的100M差分时钟对,作为南桥的主时钟信号PWR_GOOD:通知南桥,此时S0状态电压全部OK (25M开始起振)。
PCICLK(5:0):南桥发出的PCI时钟NB_PWRGD(单桥无此信号):南桥发出的,表示北桥的供电正常,连接北桥的POWERGOOD脚SB700南桥具备完整时钟功能,如果启用南桥内部集成的时钟芯片,NB_PWRGD可以空置,把北桥的POWERGOOD脚连接到PWR_GOOD即可;如果不启用南桥内部全部时钟功能,必须等待时钟电路工作且稳定后,南桥才会发出NB_PWRGD给北桥POWERGOOD脚。
LDT_ STP#:南桥发给CPU的退出停止状态的信号,由内存供电上拉LDT_PG:南桥发出给CPU的电源好,由内存供电上拉A_RST#:南桥发出的平台复位,相当于INTEL的PLTRST#,3.3VPCIE_RST#:PCIE_RST#复位,仅AMD SB8XX后南桥有PCIRST#:南桥发出的PCI复位,3.3VLDT_RST#:南桥直接发给CPU的复位,由内存供电上拉。
LCD三个时序信号

24bit_TFT1、时序LCD一般需要三个时序信号:VSYNC、HSYNC和VCLK。
VSYNC是垂直同步信号,在每进行一个帧(即一个屏)的扫描之前,该信号就有效一次,由该信号可以确定LCD的场频,即每秒屏幕刷新的次数(单位Hz)。
HSYNC是水平同步信号,在每进行一行的扫描之前,该信号就有效一次,由该信号可以确定LCD的行频,即每秒屏幕从左到右扫描一行的次数(单位Hz)。
VCLK是像素时钟信号。
s3c2440处理LCD的时钟源是HCLK,通过寄存器LCDCON1中的CLKVAL可以调整VCLK频率大小,它的公式为:VCLK=HCLK÷[(CLKVAL+1)×2]例如,HCLK的频率为100MHz,要想驱动像素时钟信号为6.4MHz的LCD屏,则通过上式计算CLKVAL值,结果CLKVAL为6.8,取整后(值为6)放入寄存器LCDCON1中相应的位置即可。
由于CLKVAL进行了取整,因此我们把取整后的值代入上式,重新计算VCLK,得到VCLK=7.1MHz。
按理说,对于一个已知尺寸(即水平显示尺寸HOZVAL和垂直显示尺寸LINEVAL 已知)的LCD屏,只要确定了VCLK值,行频和场频就应该知道了。
但这样还不行的,因为在每一帧时钟信号中,还会有一些与屏显示无关的时钟出现,这就给确定行频和场频带来了一定的复杂性。
如:在HSYNC信号先后会有水平同步信号前肩(HFPD)水平同步信号后肩(HBPD)出现,在VSYNC信号先后会有垂直同步信号前肩(VFPD)垂直同步信号后肩(VBPD)出现,在这些信号时序内,不会有有效像素信号出现,另外HSYNC和VSYNC信号有效时,其电平要保持一定的时间,它们分别叫做水平同步信号脉宽HSPW垂直同步信号脉宽VSPW这段时间也不能有像素信号。
因此计算行频和场频时,一定要包括这些信号。
HBPD、HFPD和HSPW的单位是一个VCLK的时间,而VSPW、VFPD和VBPD的单位是扫描一行所用的时间。
I2C总线信号时序总结
I2C总线信号时序总结I2C(Inter-Integrated Circuit)是一种串行通信协议,用于连接微控制器、传感器、存储器等芯片之间的通信。
它的工作原理是通过两根信号线,即SCL(串行时钟线)和SDA(串行数据线),实现设备之间的通信。
下面将对I2C总线信号的时序进行详细总结。
起始条件:当SDA信号先于SCL信号变为低电平时,表示通信即将开始,这就是起始条件。
停止条件:当SCL信号先于SDA信号变为高电平时,表示通信即将结束,这就是停止条件。
在起始和停止条件之后,我们需要考虑数据传输和应答的过程。
数据传输可以分为发送和接收两个过程。
发送数据:发送数据是指主设备将数据发送给从设备。
在SCL为低电平期间,主设备可以在SDA上进行数据传输。
接收数据:接收数据是指从设备将数据发送给主设备。
在SCL为高电平期间,从设备可以在SDA上进行数据传输。
在数据传输过程中,还有一个非常重要的环节是应答。
应答用于确认数据的传输是否成功。
主设备应答:在从设备发出数据位后,主设备需要将SDA拉低作为应答信号,通知从设备数据传输成功。
从设备应答:在主设备发出数据位后,从设备需要在SDA上拉低作为应答信号,通知主设备数据已接收。
时钟频率:I2C总线的时钟频率由主设备生成,通常主设备会通过时钟分频器来控制通信速率。
时钟稳定性:I2C总线的稳定性对于数据传输非常重要。
如果时钟信号不稳定,可能导致数据传输错误。
信号的高低电平:I2C总线的信号需要保持在有效电平范围内,通常在0V到Vcc之间。
总线释放:当I2C总线上的设备不发送或接收数据时,需要释放总线,即将SDA和SCL置于高电平状态。
总结起来,I2C总线信号的时序包括起始和停止条件、数据传输和应答、速率控制等方面。
它在通信过程中使用SCL和SDA两根信号线,通过起始和停止条件来指示通信的开始和结束,通过数据传输和应答来实现发送和接收数据,通过速率控制来控制通信速率。
这些时序要求保持稳定、准确和可靠,以确保正常的数据传输和通信。
深度学习技术中的时序信号处理方法详解
深度学习技术中的时序信号处理方法详解时序信号是指随时间变化的信号,常见于日常生活中的音频、视频、语音等。
在深度学习中,针对时序信号的处理是一个重要的研究方向。
本文将详细介绍深度学习技术中用于时序信号处理的方法。
1. 循环神经网络(RNN)循环神经网络是一种专门用于处理时序信号的神经网络模型。
其特点是能够处理任意长度的序列数据,并利用网络的记忆机制传递信息。
RNN的基本单元是一个循环单元,或称为长短期记忆(LSTM)单元。
LSTM通过门控结构来控制信息的流动,具有较好的记忆性能,适用于处理长序列数据。
2. 卷积神经网络(CNN)卷积神经网络主要用于图像识别,但也可以应用于时序信号处理。
对于一维时序信号,可以将其视为一维图像,并利用卷积层提取特征。
在时序信号处理中,卷积神经网络通常用于提取局部特征,例如语音信号的频谱特征。
此外,可以通过多层卷积和池化操作来逐步提取更抽象的特征。
3. 长短时记忆网络(LSTM)长短时记忆网络是一种循环神经网络的变种,专门用于解决长期依赖问题。
在时序信号处理中,往往需要对历史信息进行建模,而传统的循环神经网络在处理长期依赖时容易出现梯度消失或爆炸的问题。
LSTM通过引入门控结构,能够更好地处理长期依赖关系,适用于模拟时序信号中的复杂规律。
4. 双向循环神经网络(Bi-RNN)双向循环神经网络由两个方向相互独立的循环神经网络组成,能够充分利用过去和未来的信息进行预测。
在时序信号处理中,双向循环神经网络能够同时考虑上下文信息,提高模型的性能。
对于音频信号的语音识别任务,双向循环神经网络可以更准确地捕捉语音中的语义信息。
5. 自注意力机制(Self-Attention)自注意力机制是一种新兴的机器学习方法,专用于处理序列数据中的依赖关系。
在时序信号处理中,自注意力机制能够自动学习不同位置之间的关系,并将重要的信息进行加权汇总。
相比于传统的循环神经网络,自注意力机制具有并行计算的优势,能够处理较长的序列数据。
I2C总线信号时序总结
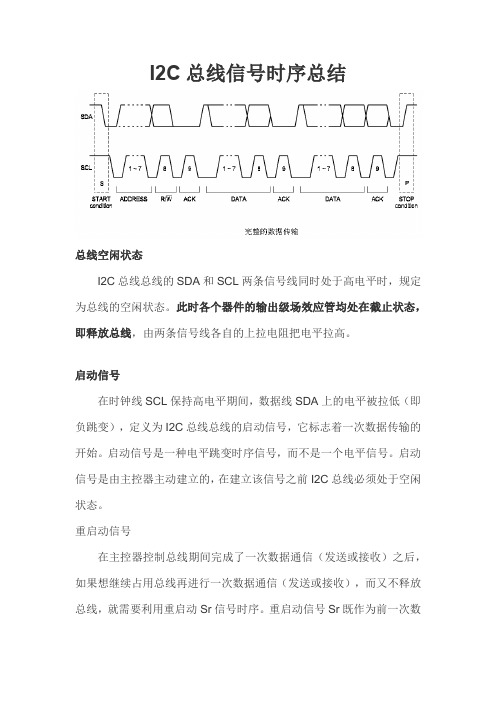
I2C总线信号时序总结总线空闲状态I2C总线总线的SDA和SCL两条信号线同时处于高电平时,规定为总线的空闲状态。
此时各个器件的输出级场效应管均处在截止状态,即释放总线,由两条信号线各自的上拉电阻把电平拉高。
启动信号在时钟线SCL保持高电平期间,数据线SDA上的电平被拉低(即负跳变),定义为I2C总线总线的启动信号,它标志着一次数据传输的开始。
启动信号是一种电平跳变时序信号,而不是一个电平信号。
启动信号是由主控器主动建立的,在建立该信号之前I2C总线必须处于空闲状态。
重启动信号在主控器控制总线期间完成了一次数据通信(发送或接收)之后,如果想继续占用总线再进行一次数据通信(发送或接收),而又不释放总线,就需要利用重启动Sr信号时序。
重启动信号Sr既作为前一次数据传输的结束,又作为后一次数据传输的开始。
利用重启动信号的优点是,在前后两次通信之间主控器不需要释放总线,这样就不会丢失总线的控制权,即不让其他主器件节点抢占总线。
重启动信号在主控器控制总线期间完成了一次数据通信(发送或接收)之后,如果想继续占用总线再进行一次数据通信(发送或接收),而又不释放总线,就需要利用重启动Sr信号时序。
重启动信号Sr既作为前一次数据传输的结束,又作为后一次数据传输的开始。
利用重启动信号的优点是,在前后两次通信之间主控器不需要释放总线,这样就不会丢失总线的控制权,即不让其他主器件节点抢占总线。
停止信号在时钟线SCL保持高电平期间,数据线SDA被释放,使得SDA返回高电平(即正跳变),称为I2C总线的停止信号,它标志着一次数据传输的终止。
停止信号也是一种电平跳变时序信号,而不是一个电平信号,停止信号也是由主控器主动建立的,建立该信号之后,I2C总线将返回空闲状态。
不是在数据有效性中规定在SDA只能在SCL的低电平的时候变化,为何STAR,STOP不一样?首先STAR和STOP不是数据,所以可以不遵守数据有效性中的规定,其它数据都遵守,而STAR和STOP “不遵守”导致STAR和STOP更容易被识别。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统时序基础理论对于系统设计工程师来说,时序问题在设计中是至关重要的,尤其是随着时钟频率的提高,留给数据传输的有效读写窗口越来越小,要想在很短的时间限制里,让数据信号从驱动端完整地传送到接收端,就必须进行精确的时序计算和分析。
同时,时序和信号完整性也是密不可分的,良好的信号质量是确保稳定的时序的关键,由于反射,串扰造成的信号质量问题都很可能带来时序的偏移和紊乱。
因此,对于一个信号完整性工程师来说,如果不懂得系统时序的理论,那肯定是不称职的。
本章我们就普通时序(共同时钟)和源同步系统时序等方面对系统时序的基础知识作一些简单的介绍。
一. 普通时序系统(共同时钟系统)所谓普通时序系统就是指驱动端和接收端的同步时钟信号都是由一个系统时钟发生器提供。
下图就是一个典型的普通时钟系统的示意图,表示的是计算机系统的前端总线的时序结构,即处理器(CPU)和芯片组(Chipset)之间的连接。
在这个例子中,驱动端(处理器)向接收端(芯片组)传送数据,我们可以将整个数据传送的过程考虑为三个步骤:1.核心处理器提供数据;2.在第一个系统时钟的上升沿到达时,处理器将数据Dp锁存至Qp输出;3.Qp沿传输线传送到接收端触发器的Dc,并在第二个时钟上升沿到达时,将数据传送到芯片组内部。
一般来说,标准普通时钟系统的时钟信号到各个模块是同步的,即图中的Tflight clka和Tflight clkb 延时相同。
通过分析不难看出,整个数据从发送到接收的过程需要经历连续的两个时钟沿,也就是说,如果要使系统能正常工作,就必须在一个时钟周期内让信号从发送端传输到接收端。
如果信号的传输延迟大于一个时钟周期,那么当接收端的第二个时钟沿触发时,就会造成数据的错误读取,因为正确的数据还在传输的过程中,这就是建立时间不足带来的时序问题。
目前普通时序系统的频率无法得到进一步提升的原因就在于此,频率越高,时钟周期越短,允许在传输线上的延时也就越小,200-300MHz已经几乎成为普通时序系统的频率极限。
那么,是不是传输延时保持越小就越好呢?当然也不是的,因为它还必须要满足一定的保持时间。
在接下来几节里,我们就建立和保持时间来分析一下时序设计需要考虑的一些问题以及正确的系统时序所必须满足的条件。
1. 时序参数的确定对于时序问题的分析,我们首先要清楚地理解相关的一些时序参数的具体含义,比如Tco,缓冲延时,传播延迟,最大/小飞行时间,建立时间,保持时间,建立时间裕量,保持时间裕量,时钟抖动,时钟偏移等等,如果对这些参数的概念理解不深刻,就很容易造成时序设计上的失误。
首先要阐明的是Tco和缓冲延时(buffer delay)的区别。
从定义上来说,Tco是指时钟触发开始到有效数据输出的器件内部所有延时的总和;而缓冲延时是指信号经过缓冲器达到有效的电压输出所需要的时间。
可以看出,Tco除了包含缓冲延时,还包括逻辑延时。
通常,确定Tco的方法是在缓冲输出的末端直接相连一个测量负载,最常见的是50欧姆的电阻或者30pF的电容,然后测量负载上的信号电压达到一定电平的时间,这个电平称为测量电压(Vms),一般是信号高电平的一半。
如Tco和缓冲延时的确定如下图所示:信号从缓冲器出来之后,就要经过传输线到接收终端,信号在传输线上的传输的延时我们称为传播延迟(propagation delay),它只和信号的传播速度和线长有关。
然而我们在大多数时序设计里面,最关键的却不是传播延迟这个参数,而是飞行时间(Flight Time)参数,包括最大飞行时间(Max Flight Time)和最小飞行时间(Min Flight Time)。
飞行时间包含了传播延迟和信号上升沿变化这两部分因素,从下图中可以很容易看出两者的区别。
在较轻的负载(如单负载)情况下,驱动端的上升沿几乎和接收端的信号的上升沿平行,所以这时候平均飞行时间和传播延迟相差不大;但如果在重负载(如多负载)的情况下,接收信号的上升沿明显变缓,这时候平均飞行时间就会远远大于信号的传播延迟。
这里说的平均飞行时间是指Buffer波形的Vms到接收端波形Vms之间的延时,这个参数只能用于时序的估算,准确的时序分析一定要通过仿真测量最大/最小飞行时间来计算。
上面只是对信号上升沿的分析,对于下降沿来说,同样存在着最大/最小飞行时间的参数,如下图。
在时序计算时我们实际取的最大飞行时间是在上升沿和下降沿中取最长的那个飞行时间,而最小飞行时间则是取上升和下降沿中最短的那个飞行时间。
也有些时候,人们对信号的最大/最小飞行时间还有其它称谓,比如在Cadence软件中,就将最大飞行时间称为最终稳定延时(Final Settle Delay),而将最小飞行时间称为最早开关延时(Firsttch Delay),如下图。
信号经过传输线到达接收端之后,就牵涉到建立时间和保持时间这两个时序参数,它们是接收器本身的特性,表征了时钟边沿触发时数据需要在锁存器的输入端持续的时间。
通俗地说,时钟信号来的时候,要求数据必须已经存在一段时间,这就是器件需要的建立时间(Setup Time);而时钟边沿触发之后,数据还必须要继续保持一段时间,以便能稳定的读取,这就是器件需要的保持时间(Hold Time)。
如果数据信号在时钟沿触发前后持续的时间均超过建立和保持时间,那么超过量就分别被称为建立时间裕量和保持时间裕量。
见图1-6-6,其中还考虑了时钟误差的因素。
每个器件的建立和保持时间参数,一般都可以在相应的DataSheet查到,对于设计者来说最大的目的是提高时序的裕量,这样即使信号完整性上出现一点问题,或者外界环境发生一定的变化,系统仍然能正常工作,这就是一个设计优良的系统应该体现出的超强的稳定性。
系统时序设计中对时钟信号的要求是非常严格的,因为我们所有的时序计算都是以恒定的时钟信号为基准。
但实际中时钟信号往往不可能总是那么完美,会出现抖动(Jitter)和偏移(Skew)问题。
所谓抖动,就是指两个时钟周期之间存在的差值,这个误差是在时钟发生器内部产生的,和晶振或者PLL内部电路有关,布线对其没有影响,如图1-6-7。
除此之外,还有一种由于周期内信号的占空比发生变化而引起的抖动,称之为半周期抖动。
总的来说,jitter可以认为在时钟信号本身在传输过程中的一些偶然和不定的变化之总和。
时钟偏移(skew)是指两个相同的系统时钟之间的偏移。
它表现的形式是多种多样的,既包含了时钟驱动器的多个输出之间的偏移,也包含了由于PCB走线误差造成的接收端和驱动端时钟信号之间的偏移,比如在图1-6-1中所示,CLKA和CLKB之间的差异,CLKC和CLKP之间的差异均为时钟偏移,这些偏移量在时序计算中需要全部考虑。
除了上面提到的这些概念,还有一点要注意的是,时刻不能忽略信号完整性对时序的影响,比如串扰会影响微带线传播延迟;反射会造成数据信号在逻辑门限附近波动,从而影响最大/最小飞行时间;时钟走线的干扰会造成一定的时钟偏移。
有些误差或不确定因素是仿真中无法预见的,设计者只有通过周密的思考和实际经验的积累来逐步提高系统设计的水平。
2 时序约束条件下面来具体讨论一下系统时序需要满足的一些基本条件。
我们仍然以图1-6-1的结构为例,并可以据此画出相应的时序分析示意图(图1-6-8)。
在上面的时序图中,存在两个时序环,我们称实线的环为建立时间环,而虚线的环我们称之为保持时间环。
可以看到,这两个环都不是闭合的,缺口的大小就代表了时序裕量的多少,因此设计者总希望尽可能增大这个缺口。
同时还要注意到,每个环上的箭头方向不是一致的,而是朝着正反两个方向,因为整个系统时序是以时钟上升沿为基准的,所以我们时序环的起点为系统时钟clk in的上升沿,而所有箭头最终指向接收端的控制时钟CLKC的边沿。
先来分析建立时间环:缺口的左边的半个时序环代表了从第一个系统时钟上升沿开始,直到数据传输至接收端的总的延时,我们计为数据延时,以Tdata tot表示:Tdata tot =Tco clkb+Tflt clkb +Tco data +Tflt data上式中:Tco clkb是系统时钟信号CLKB在时钟驱动器的内部延迟;Tflt clkb 是CLKB从时钟驱动器输出后到达发送端(CPU)触发器的飞行时间;Tco data是数据在发送端的内部延迟;Tflt data是数据从发送端输出到接收端的飞行时间。
从CLKC时钟边沿的右边半个时序环代表了系统时钟到达接收端的总的沿时,我们计为时钟延时,以Tclk tot表示:Tclk tot =Tcycle +Tco clka +Tflt clka – Tjitter其中,Tcycle是时钟信号周期;Tco clka 是系统时钟信号CLKA(第二个上升沿)在时钟驱动器的内部延迟;Tflt clka是时钟信号从时钟驱动器输出到达接收端触发器的飞行时间;Tjitter是时钟的抖动误差。
因此我们可以根据建立时间裕量的定义,得到:Tsetup margin = Tclk tot – Tdata tot – Tsetup将前面的相应等式带入可得:Tsetup marin = Tcycle + Tco clka + Tflt clka – Tjitter – Tco clkb – Tflt clkb – Tco data – Tflt data – Tsetup我们定义时钟驱动器(PLL)的两个时钟输出之间的偏移为Tclock Skew ,两根CLOCK走线之间的时钟偏移为TPCB Skew ,即:Tclock Skew = Tco clkb - Tco clka;TPCB Skew = Tflt clkb - Tflt clka这样就可以得到建立时间裕量的标准计算公式:Tsetup marin =Tcycle – TPCB skew –Tclock skew –Tjitter – Tco data – Tflt data-Tsetup (1.6.1)再来看保持时间环:对照图1-6-8,我们可以同样的进行分析:Tdata delay = Tco clkb + Tflt clkb + Tco data + Tflt dataTclock delay = Tco clka + Tflt clka于是可以得出保持时间裕量的计算公式:Thold margin = Tdata delay – Tclock dalay – Thold time即: Thold margin = Tco data + Tflt data + Tclock skew + Tpcb skew – Thold (1.6.2)可以看到,式1.6.2中不包含时钟抖动Jitter的参数。