半自动钻床说明书
半自动钻床_陈富

机械原理设计说明书半自动钻床的设计起止日期: 2011年 6 月 24 日至 2011 年 7 月 1 日学生姓名陈富班级学号成绩指导教师(签字)机械工程学院(部)2011年 6 月25 日目录0.设计任务书 (3)1.工作原理和工艺动作分解 (4)2.根据工艺动作和协调要求拟定运动循环图 (5)3.执行机构选型 (6)4.机械运动方案的选择和评定 (7)5.机械传动系统的速比和变速机构 (11)6.半自动钻床的机构运动简图 (14)7.凸轮机构的尺度设计 (15)8.定位凸轮速度与加速度分析(分析一个位置) (17)9,部分构件的三维图 (18)10. 参考资料 (20)11设计总结 (20)湖南工业大学课程设计任务书2011 —2012 学年第 2 学期学院(系、部)专业班级课程名称:机械原理课程设计设计题目:半自动钻床的设计完成期限:自 2011 年 6 月 24 日至 2011 年 7 月 1 日共 1 周指导教师: 2011 年6 月 20 日系(教研室)主任: 2011 年 6 月 20 日1. 工作原理和工艺动作分解根据任务书的要求,该机械的进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构将加工工件可靠固定。
三个执行构件的运动形式为:(1)动力头完成往复(铅垂上下)直线运动,下移到最低点后立刻上移。
在下移之前有一段时间是休止的,这段时间正好用于送料和定位。
动力头的行程是20mm。
若机构主动作一转完成一个运动循环,则上冲头位移线图的形状大致如图1-1所示。
图1-1 动力头位移线图(2)送料机构做水平的往复运动,工作行程是35mm。
开始送料机构先迅速的把胚料送到加工台,稍作停顿后立刻返回,在工件的加工过程中保持休止。
其位移线图大致如图1-2所示。
图1-2送料机构位移线图(3)定位机构也是在水平面做往复运动,在工件加工的时候对工件起固定的作用。
行程是25mm。
其位移线图大致如图1-3所示。
机械原理课程设计半自动钻床说明书

机械原理课程设计说明书设计题目:半自动钻床专业机械设计制造及其自动化学号姓名蒋朝伟35王鹏伟36莫森34周海浩20张昊昉08班级机制131指导教师郁倩完成日期目录设计任务书 (1)1.工作原理分析 (4)2.功能分解及工艺动作 (4)功能分解图 (4)工艺动作 (5)3.原始数据及计算 (5)原始数据处理 (5)拟定运动循环图 (7)4.方案设计思路及讨论改进 (8)方案设计思路 (8)方案讨论改进 (10)5.执行机构的设计 (14)行星轮的计算 (14)送料机构分析 (16)动力头机构分析 (16)定位机构分析 (18)夹紧机构分析 (18)6.总机评价 (19)7.设计感想 (20)8.参考文献 (21)设计任务书见稿纸1.工作原理分析半自动钻床的工作原理是利用转头的旋转和进刀切削掉工件的余料而得到工件尺寸形状。
工艺动作过程由送料定位钻孔三部分组成。
各个机构的运动由同一电机驱动,运动由电动机经过减速装置后分为两路,一路随着传动传动皮带传送动力到定位机构和送料机构,分别带动凸轮做转动控制四杆机构对工件的定位和带动凸轮四杆机构控制推杆做往复直线运动。
另一路直接传动到钻头的进退刀机构,控制钻头的进退。
2、功能分解及工艺动作功能分解图如下工艺动作基本运动为:推杆的往复直线运动,定位机构的间歇运动和钻头的往复运动。
此外,还要满足传动性能要求:1 送料、定位、进刀机构在凸轮轴不同转角时候快慢行程不同。
2 各个机构之间的配合相互有序,满足凸轮轴转角对应的性能要求。
3、原始数据及计算原始数据处理根据任务书的要求,该机械的进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构与夹紧将加工工件可靠固定。
四个执行构件的运动形式为:(1)动力头完成往复(铅垂上下)直线运动,下移到最低点后立刻上移。
在下移前一段时间是快速趋近15mm,这段时间正好用于送料和定位。
动力头的行程是。
若机构主动作一转完成一个运动循环,则上冲头位移线图的形状大致如图3-1所示。
半自动钻床说明书

课程设计课程名称:机械原理学院:机械工程学院专业:机制姓名:学号:年级:2010级任课教师:戴明2013年1月18日机械原理课程设计任务书题号03半自动钻床一、设计题目及原始数据设计加工所示工件ф12mm孔的半自动钻床。
进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构使被加工工件可靠固定。
半自动钻床设计数据参看下表。
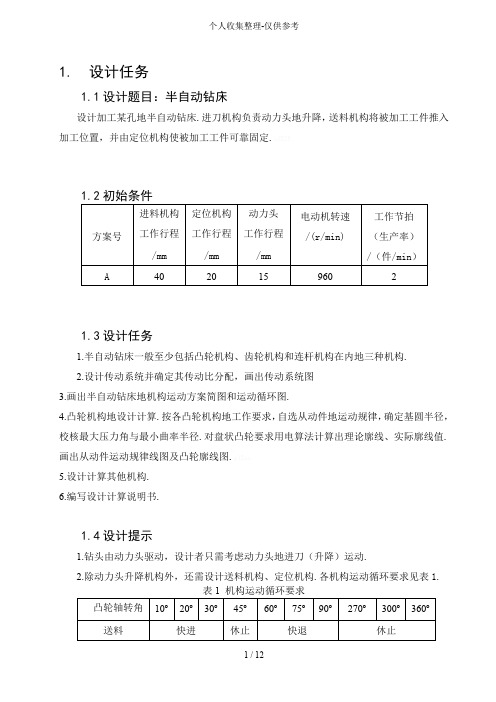
半自动钻床凸轮设计数据表方案号进料机构工作行程mm定位机构工作行程mm动力头工作行程mm 电动机转速r/mm工作节拍(生产率)件/minA 40 30 15 1450 1B 35 25 20 1400 2C 30 20 10 960 1二、设计方案提示1.钻头由动力头驱动,设计者只需考虑动力头的进刀(升降)运动。
2. 除动力头升降机构外,还需要设计送料机构、定位机构。
各机构运动循环要求见下表。
机构运动循环要求表凸轮轴转角10º20º30º45º60º75º90º105º~270º300º360º送料快进休止快退休止定位休止快进休止快退休止进刀休止快进快进快退休止3. 可采用凸轮轴的方法分配协调各机构运动。
三、设计任务1.半自动钻床至少包括凸轮机构、齿轮机构在内的三种机构;2.设计传动系统并确定其传动比分配,并在图纸上画出传动系统图;3. 图纸上画出半自动钻床的机构运动方案简图和运动循环图;4.凸轮机构的设计计算。
按各凸轮机构的工作要求,自选从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。
对盘状凸轮要用电算法计算出理论廓线、实际廓线值。
画出从动件运动规律线图及凸轮廓线图;5.设计计算其他机构;6.编写设计计算说明书;目录一设计工作原理 (5)1.1工作原理和工艺动作分解 (5)1.2三个执行构件的运动形式 (6)二执行机构功能分析 (7)2.1 减速传动功能 (7)2.2 进料功能 (7)2.3定位功能 (7)2.4 进刀功能 (7)三机械运动方案的选择和对比 (8)3.1减速机构 (8)3.2送料机构 (10)3.3定位机构 (11)3.4 动力头工作机构 (13)3.5功能单元匹配及循环图 (14)四执行机构设计过程及尺寸计算 (17)4.1行星轮系的计算 (17)4.2送料连杆机构 (18)4.3定位机构采用如下分析 (19)4.4动力头机构采用如下分析 (21)五总体机构简图 (25)六凸轮设计参数 (26)6.1定位凸轮参数详见附图二 (26)6.2定位凸轮运动分段图详见附图三 (26)6.3定位凸轮运动分析图详见附图四 (26)6.4进刀凸轮参数详见附图五 (26)6.5进刀凸轮运动分段图详见附图六 (26)6.6进刀凸轮运动分析图详见附图七 (26)七连杆机构运动学分析 (26)7.1连杆三维图详见附图八 (26)7.2连杆位置分析图详见附图九 (26)7.3连杆速度分析图详见附图十 (26)7.4连杆加速度分析图详见附图十一 (26)八设计总体三维图 (26)8.1总体三维图详见附图十二 (26)附录 (27)总结 (34)参考文献 (36)一设计工作原理半自动钻床的工作原理是利用钻头的旋转和进刀切削掉工件的余料而得到工件尺寸形状。
钻床设备操作指导书(含表格)

钻床设备操作指导书
(IATF16949-2016/ISO9001-2015)
1.0目的
为了规范作业员操作方式、维护安全生产与设备的全理使用,提高产品质量和工作效率。
2.0适用范围
本公司钻床的操作与保养。
3.0职责
钻床作业员负责钻床的操作。
4.0作业内容
4.1先检查电路是否完好,电机是否稳固,钻咀是否松动。
4.2根据产品尺寸选用适当的钻咀。
(但不能超过该机规定之尺寸)
4.3启动电源,转动是否灵活、方向是否符合要求,方可作业。
4.4钻孔/沉孔的工件要稳固,不能左右摆动,钻深孔时要匀速钻,不能用力过大压下钻头。
4.5钻大孔时,确定孔的位置尺寸,先找出孔的中心点,以免钻头摆动,造成误差。
4.6下班要清扫机位,关好电源。
5.0保养事项
5.1每天上班或下班前对设备进行保养,并及时填写《设备保养维修记录表》。
5.2具体保养项目参见《设备保养维修记录表》。
6.0注意事项
6.1严禁戴手套作业。
6.2随时注意运转的机器磨损电源线绝缘层,以防漏电。
6.3在工作中出现异常声音或故障时,应立即停机检查。
7.0质量记录
7.1《设备保养维修记录表》
钻床日常点检记录
表.xl s
钻床日常维护保养
点检记录表.xl s
钻床设备三级保养
记录表.xl s。
钻床作业指导书及操作规范

钻床作业指导书及操作规范一、钻床简介钻床是一种用来在物体表面钻孔的机器工具,广泛应用于机床、车间、工厂等制造及维修领域。
钻床可根据不同的钻头形状和尺寸,用于钻孔、扩孔、锪孔、铰孔等不同工艺。
二、钻床的操作规范1. 操作前的准备在启动钻床之前,必须进行以下准备工作:•确定要钻孔的位置和深度。
•选择合适的钻头并安装好。
•根据钻孔材料和孔径决定转速和进给速度。
•确保床面和工作台面平整。
2. 操作步骤① 先将钻头对准要钻的位置,然后启动电机。
② 使用手柄将钻头下压至工件表面,缩回手柄,调整好夹紧力。
③ 调整好转速和进给速度,开始钻孔。
④ 钻孔时,要保持工件和钻头夹持装置稳定,防止工件和钻头移动。
⑤ 钻孔完成后,须停止电机,将手柄缓慢地拔起,取下钻头。
3. 注意事项•钻削过程中一定要佩戴防护眼镜,保持工作场所整洁和干燥,并禁止穿着松散的衣服和饰品。
•确保工作台面平整,及时清理切屑和冷却液。
•钻削过程中注意听声观察,发现打滑、异响等情况需要立即停机检查。
三、维护保养1. 日常维护•按照使用要求,定期清理和加油润滑链条等部件。
•检查电源线是否有断裂、破损现象,并定期更换。
2. 定期维护•定期检查和更换钻头,定期校正工作台和主轴中心线。
•在钻孔过程中保持适当的润滑和散热,以保护设备使用寿命。
四、结语以上就是钻床的操作规范和维护保养方法,通过遵守这些规范和方法,不仅可以提高工作效率,也能延长设备的使用寿命。
当然,在使用钻床时,需要掌握相关技能和操作要领,同时在钻削过程中要时刻注意安全,保障人身安全和设备安全。
半自动钻床,陈富共8页文档

机械原理设计说明书半自动钻床的设计起止日期:2019年6 月24 日至2019 年7 月 1 日学生姓名陈富班级学号成绩指导教师(签字)机械工程学院(部)2019年6 月25 日目录0.设计任务书 (3)1.工作原理和工艺动作分解 (4)2.根据工艺动作和协调要求拟定运动循环图 (5)3.执行机构选型 (6)4.机械运动方案的选择和评定 (7)5.机械传动系统的速比和变速机构 (11)6.半自动钻床的机构运动简图 (14)7.凸轮机构的尺度设计 (15)8.定位凸轮速度与加速度分析(分析一个位置) (17)9,部分构件的三维图 (18)10. 参考资料 (20)11设计总结 (20)湖南工业大学课程设计任务书2019 —2019 学年第2 学期学院(系、部)专业班级课程名称:机械原理课程设计设计题目:半自动钻床的设计完成期限:自2019 年 6 月24 日至2019 年7 月 1 日共 1 周指导教师:2019 年6 月20 日系(教研室)主任:2019 年 6 月20 日1. 工作原理和工艺动作分解根据任务书的要求,该机械的进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构将加工工件可靠固定。
三个执行构件的运动形式为:(1)动力头完成往复(铅垂上下)直线运动,下移到最低点后立刻上移。
在下移之前有一段时间是休止的,这段时间正好用于送料和定位。
动力头的行程是20mm。
若机构主动作一转完成一个运动循环,则上冲头位移线图的形状大致如图1-1所示。
图1-1 动力头位移线图(2)送料机构做水平的往复运动,工作行程是35mm。
开始送料机构先迅速的把胚料送到加工台,稍作停顿后立刻返回,在工件的加工过程中保持休止。
其位移线图大致如图1-2所示。
图1-2送料机构位移线图(3)定位机构也是在水平面做往复运动,在工件加工的时候对工件起固定的作用。
行程是25mm。
其位移线图大致如图1-3所示。
图1-3定位机构位移线图2.根据工艺动作和协调要求拟定运动循环图拟定运动循环图的目的是确定各机构执行构件动作的先后顺序、相位,以利于设计、装配和调试。
课程设计《半自动钻床》

机械原理课程设计说明书设计题目: 半自动钻床系别: 机电工程学院专业: 机械设计制造及自动化班级:设计者:学号:同组者姓名:指导教师:2007年7月15日设计任务学生姓名:专业:机械设计制造及其自动化班级:课程设计题目:半自动钻床指导教师:目录前言………………………………………………………………..第一章概述及设计要求………………………………………..1.1功能要求及工艺动作流程图………………………………第二章传动方案…………………………………………………2.1拟定传动方案………………………………………………第三章传动机构的选择…………………………………第四章主要执行结构方案设计……………………………4.1定位机构…………………………………………………4.2送料机构…………………………………………………4.3进刀机构…………………………………………………4.4形态学矩阵图………………………………………….第五章机械运动系统设计方案拟定……………………………5.1拟订的方案………………………………………………….第六章方案的评价………………………………………………6.1方案评价表第七章系统设计数据处理………………………………………...7.1方案的数据处理…………………………………………7.2传动机构的尺寸设计及数据处理………………………….结束语前言随着科学技术、工业生产水平的不断发展和人们生活条件的不断改善,消费者的价值观念变化很快,市场需求才出现多样化的特征,机械产品的种类日益增多,例如,各种金属切削机床、仪器仪表、重型机械、轻工机械、纺织机械、石油化工机械、交通运输机械、海洋作业机械、钢铁成套设备、办公设备、家用电器以及儿童玩具等等。
同时,这些机械产品的寿命周期也相应缩短。
企业为了赢得市场,必须不断开发符合市场需求的产品。
新产品的设计与制造,其中设计是产品开发的第一步,是决定产品的性能、质量、水平、市场竞争力和经济效益的最主要因素。
三轴半自动钻床讲解

简易专用半自动三轴转床总体设计2015目录设计任务书 (2)总体方案设计 (3)1.传动方式 (3)2.绘制机构传动方案 (3)3.原动机的选择 (4)1).选择原动机的类型 (4)2).选择电动机容量 (4)3).确定传动转速 (4)4)分配传动比 (4)4.运动和动力参数计算 (5)5.总体传动参数 (6)主要零部件设计计算 (7)V带传动设计 (7)输入轴带传动设计 (7)齿轮传动设计 (9)直齿圆锥齿轮传动设计 (9)直齿圆柱齿轮传动设计 (13)轴的设计与校核 (18)输入轴设计 (18)输入轴校核 (18)中间轴设计 (20)中间轴校核 (20)输出轴设计 (23)输出轴校核 (23)键的选择与校核 (26)轴承的选择与校核 (28)箱体的设计 (32)润滑和密封形式的选择,润滑油或润滑脂的牌号的选择 (33)其他技术说明 (33)参考文献 (35)设计任务书1.设计题目简易专用半自动三轴钻床设计2.设计要求1)三个钻头速度相同-主运动,安装工件的工作台作进给运动。
每个钻头的切削阻力矩为T,每个钻头轴向进给力为F,被加工零件上三孔直径均为D,每分钟加工两件。
2)有凹凸时先钻凹凸上的孔,待钻到一定深度时再继续钻其他孔3.设计任务1)完成转床总体传动方案的设计和论证。
2)完成转头主要传动装置的结构设计。
3)完成装配图1张(A0),零件图2张(A0)。
4)编写设计说明书。
机械装置总体方案设计1. 传动方式的选择由设计要求一分钟加工两件,电动机转速一般为1500r/min,可知总减速比为750,这样的大减速比只有用双蜗轮蜗杆减速器能满足要求。
2. 绘制机构传动方案其中虚线框圈出部分即为要求设计的减速器部分。
3. 原动机的选择1).选择原动机的类型按照工作要求,选择Y 系列自扇冷式笼型三相异步电动机,额定电压380V 。
2).选择电动机容量工作机(转头)所需功率 P w = Fv/1000计算比较发现快速上升阶段所需功率更大,按此设计, F=mg 电动机功率532221wηηηP P d =其中η1为联轴器效率,取0.99;η2为蜗杆传动效率,取0.75;η3为滚动轴承效率,取0.99。
半自动钻床机械原理课程设计说明书

半自动钻床机械原理课程设计说明书一、引言半自动钻床是一种常用的金属加工设备,广泛应用于各种机械制造领域。
本课程设计旨在通过对半自动钻床的机械原理进行详细解释,使学生能够深入了解该设备的工作原理和结构特点,并能够进行相应的操作与维护。
二、半自动钻床的基本结构半自动钻床主要由以下几个部分组成:1.底座:支撑整个设备,具有足够的稳定性和刚性。
2.主轴箱:安装主轴和主动部件,实现工件的旋转运动。
3.工作台:固定工件,并提供相对于主轴的移动。
4.传动系统:将电能转变为机械能,驱动主轴和工作台运动。
5.控制系统:控制设备的启停、速度调节等功能。
三、半自动钻床的工作原理半自动钻床通过旋转主轴和移动工作台来实现对工件进行钻孔。
其工作原理如下:1.开启电源:通过控制系统将电源接通,启动传动系统。
2.调节主轴速度:通过控制系统调节传动系统的速度,控制主轴的旋转速度。
3.固定工件:将待加工的工件固定在工作台上,并调整工作台的位置,使得钻头可以准确对准加工位置。
4.开始钻孔:按下操作按钮,启动传动系统和控制系统。
主轴开始旋转,同时工作台开始移动。
钻头进入工件,并进行钻孔操作。
5.完成钻孔:当钻头完全穿过工件后,停止传动系统和控制系统。
取出已加工好的工件。
四、半自动钻床的结构特点半自动钻床具有以下几个结构特点:1.稳定性好:底座采用坚固的铸铁材料制成,能够提供足够的稳定性和刚性,保证设备在运行过程中不会发生晃动或变形。
2.精度高:主轴箱采用精密加工技术制造,保证主轴和主动部件之间的配合精度。
采用高精度滚珠丝杠传递运动,确保加工精度。
3.操作简便:采用人机界面友好的控制系统,操作按钮清晰明了,方便操作员进行设备的启停和速度调节。
4.安全可靠:设备配备多重安全保护装置,如过载保护、急停按钮等,确保操作人员的安全。
五、半自动钻床的使用注意事项在使用半自动钻床时,需要注意以下几个事项:1.检查设备:在使用前,要检查设备各部分是否正常运行,如传动系统是否顺畅、控制系统是否灵敏等。
电动钻床使用说明书

电动钻床使用说明书尊敬的用户:感谢您选择我们的电动钻床产品。
为了确保您能正确、安全地使用电动钻床,本文将为您提供详细的使用说明。
在使用前,请仔细阅读本手册并按照指引操作。
重要安全提示:1.使用电动钻床时,请务必佩戴适当的个人防护装备,如安全眼镜、耳塞、手套和工作服。
2.在使用电动钻床前,请确保工作区域干燥,避免在潮湿的环境下使用。
3.在操作和维护钻床时,务必将电源插头拔出,以避免发生意外伤害。
4.请使用正确的钻头,并确保其与工件匹配,以避免卡住或滑动。
5.在更换钻头或进行维护时,务必将机器关闭,并等待钻头完全停止旋转后再进行操作。
6.禁止将手指或其他身体部位靠近钻头,以免发生意外伤害。
以上安全提示只是针对常见场景的建议,用户在使用电动钻床时,还需根据实际情况采取相应的防护措施,确保自身安全。
使用方法:1.准备工作将电动钻床放置在平稳的工作台面上,确保周围没有杂物阻挡。
2.连接电源使用标准插头将电动钻床连接到安全可靠的电源插座,并确保电源开关处于关闭状态。
3.安装钻头选择适合的钻头,并将其插入钻头夹紧装置中。
旋紧夹紧装置,确保钻头牢固固定。
4.调整转速根据需要调整电动钻床的转速。
转速调节器通常位于机身上方,您可以根据不同材质的工件选择合适的转速。
5.开始钻孔将工件放置在工作台上,并确保其稳固。
握住钻床手柄,按下电源开关。
开始慢慢钻孔,保持稳定的压力并避免过度施力,以免引起危险情况。
6.结束钻孔当钻头完全穿透工件时,松开电源开关并等待钻头完全停止旋转,然后再将钻头慢慢从工件中拔出。
保养维护:1.定期清洁在使用完毕后,请用干燥的布清洁钻床的表面,以确保机器的正常运行。
2.润滑部件定期为电动钻床的传动部分和滑动部件添加适量润滑油,以减少磨损和摩擦。
3.储存方式当您长时间不使用电动钻床时,建议将其存放在干燥、通风的地方,并将其覆盖以防尘。
4.定期检查定期检查电动钻床的电线、插头和机身是否存在损坏或松动的情况,确保使用安全。
半自动液压专用钻镗机床液压系统设计说明书

根据上述计算结果,列出各工作阶段所受的外负载(见表1-1),并画出如图1-2所示的负载循环图。
图1-1速度循环图图1-2负载循环图
表1-1工作循环各阶段的外负载
工作循环
外负载F (N)
工作循环
外负载F(N)
启动、加速
F=F +F
7530N
工进
F=F +F
23000N
快进
F=F
计算项目及内容
计算结果
半自动液压专用钻镗机床液压系统设计
某工厂设计一台钻镗专用机床,要求孔的加工精度为TI6级。要求该机床液压系统要完成的工作循环是:工件定位、夹紧→动力头快进→工进→终点停留→动力头快退→工件松开、拔销。该机床运动部件的重量为30000N,快进、快退速度为6m/min,工进的速度为20~120mm/min可无级调速,工作台的最大行程为400mm,其中工进的总行程为150mm,工进时的最大轴向切削力为20000N,工作台的导轨采用平导轨支撑方式;夹紧缸和拔销缸的行程都为25mm,夹紧力为12000—8000N之间可调,夹紧时间不大于1秒钟。
4.液压系统的验算
已知该液压系统中进、回油管的内劲均为12mm,各段管道的长度分别为:AB =0.3m,AC =1.7m,AD =1.7m,DE =2m。选用L-HL32液压油,考虑到油的最低温度为15 C时该液压油的运动粘度 =150cst =1.5cm /s,油的密度 =920kg/m 。
(1)压力损失的验算
2)计算液压缸内径D和活塞杆直径d。由负载图知最大负载F为23000N,按表2-2可取P 为0.5MPa, 为0.95,按表2-3,取d/D为0.7。将上述数据代入式
D = (2-3)
钻床说明书
1. 安全须知★★在使用本控制系统前,请您仔细阅读本手册后再进行相关的操作。
1.1 安全操作阅读并弄懂控制系统的操作,以及用户安全须知,采取必要的安全防护措施。
1.1.1 机械危险自动化设备的操作和维修具有潜在的危险,应该小心预防,以免造成人身伤害。
尽量远离运行中的设备。
正确运用面板上的键盘来对设备进行操作。
1.1.2 高压危险在操作过程中,小心电击。
依据设备安装程序和说明书进行设备安装。
通电时,不要接触电缆或电线。
只有专业维修人员才能打开控制设备。
当设备出现故障时,应切断电源进行检修,否则容易造成人员伤害或设备的损坏。
1.1.3 电源隔离请检查电源电压是否正确(AC220V±15%)。
超出上述电源电压范围时,必须增加交流稳压电源,保证控制系统正常工作而不损坏。
对于电源供电不规范的地区(如零地共用或无零线),为了确保控制系统正常工作、提高系统可靠性、保证操作者人身安全,在电网与控制系统之间,必须使用三相/两相AC380V转为二相AC220V的隔离变压器。
对于无避雷针的工作环境,必须加装避雷装置,确保系统安全。
1.1.4 工作环境控制系统的工作环境温度为0-40℃,当超出此环境温度时系统可能会出现工作不正常甚至死机等现象。
温度过低(零下)时,液晶显示器将会出现不正常显示的情况。
相对湿度应控制在0-85%。
在高温、高湿、腐蚀性气体的环境下工作时,必须采取特殊的防护措施。
防止灰尘、粉尘、金属粉尘等杂物进入控制系统。
1.1.5 系统联接系统供电用的5V(3A或以上)开关电源由用户自行配置,应选择较好的生产厂家,以保证系统安全可靠。
该电源不能作为其它电器的电源。
系统输入/输出使用的24V(3A或以上)开关电源由用户自行配置,该电源不能作为其它电器的电源。
当此电源未接入且急停和限位均设为有效时,系统将处于急停和限位状态下。
系统到电机驱动器的连线应采用良好的屏蔽线。
严禁带电插拔任何联接插头。
系统的输入/输出线应保证可靠连接。
Z5163B型半自动立式钻床的安全技术操作规程
Z5163B型半自动立式钻床的安全技术操作规程一操作人员必须是经过培训持有操作证能够独立操作,熟悉机床操作件的构造、部位、用途和电气控制,会保养,会排除一般故障。
二开机前的准备工作接通电源线及地线,对机床进行清洁工作,并按机床润滑图对机床进行润滑,并检查各紧固螺钉是否松动,冷却水管连接是否完好。
检查电气设备连接是否完好,且不得氧化。
三操作1 自动或手动选择开关的使用本机床具有手动调整和半自动循环二种不同工作方式,将自动或手动开关置于“手动”位置,机床用于分步手动调整时或调整半自动循环工作撞块,扳至“自动”位置时,机床按半自动循环工作。
2 在手动调整时主轴的快进、快退、正转都靠按压按钮实现,按钮5、6、7、8分别控制正转、反转、快退、快进,此动作除正转、反转外,均为点动,即按下按钮时,主轴停止动作,并进行制动。
手动调整时的进给运动将选择开关置于调整位置,按下按钮9,主轴快速向下到达一定位置松开按钮,则主轴制动停止,通过主操作手柄,可实现撞块位置的调整,按下按钮8,主轴快速退回。
半自动循环的操作调整撞块将手动或自动选择开关置于“手动”工作位置,根据加工件快速行程工件工进所需的实际尺寸调整撞块13、14的位置,撞块15位置固定在主轴行程的初始位置上,可根据撞块右侧刻度盘确定撞块位置,并通过主操作手柄20在对刀样件上验证撞块位置是否合适,。
此时当撞块压上相应的行程开关时,相应的指示灯应点亮,工进撞块13控制快速进给到工作进给的转换,快退撞块14控制工作进给高快速退回的转换,循环停止撞块控制主轴返回原位时的运动停止,应当注意工进撞块位置的调整应根据实际情况留有3~5㎜的过冲量,即所调整的实际行程应比理论行程少3~5㎜,以防止因快进而使刀具撞在工件上。
循环起动将自动或手动开关置于自动工作位置,按压循环启动按钮4,主轴将根据撞块13、14、15的位置完成半自动循环,主轴快速进给接近工件→主轴工进的同时接通主轴正转→到达预定的加工深度后主轴快速退回至初始位置→主轴停止,半自动循环结束。
半自动钻床说明书机械课程实施方案
1. 设计任务1.1设计题目:半自动钻床设计加工某孔地半自动钻床.进刀机构负责动力头地升降,送料机构将被加工工件推入加工位置,并由定位机构使被加工工件可靠固定.1.2初始条件1.3设计任务1.半自动钻床一般至少包括凸轮机构、齿轮机构和连杆机构在内地三种机构.2.设计传动系统并确定其传动比分配,画出传动系统图3.画出半自动钻床地机构运动方案简图和运动循环图.4.凸轮机构地设计计算.按各凸轮机构地工作要求,自选从动件地运动规律,确定基圆半径,校核最大压力角与最小曲率半径.对盘状凸轮要求用电算法计算出理论廓线、实际廓线值.画出从动件运动规律线图及凸轮廓线图.5.设计计算其他机构.6.编写设计计算说明书.1.4设计提示1.钻头由动力头驱动,设计者只需考虑动力头地进刀(升降)运动.2.除动力头升降机构外,还需设计送料机构、定位机构.各机构运动循环要求见表1.3.可采用凸轮轴地方法分配协调各机构运动.2. 工作原理及功能分解半自动钻床地工作原理是利用钻头地旋转和进刀切削掉工件地余料而得到工件尺寸形状.工艺动作过程由送料、定位夹紧、进刀三部分组成.各个机构地运动由同一电动机驱动,运动由电动机经过减速装置后分为两路,一路随着传动系统传送动力到定位夹紧机构和进刀机构,分别带动凸轮做转动控制连杆对工件地定位和通过齿轮带动齿条和动力头做往复直线运动.另一路直接传动到送料机构,控制地送料机构地进退.即该系统由电动机驱动,通过变速传动将电动机地转速由960r/min降到主轴地2r/min,与传动轴相连地凸轮机构控制送料,定位夹紧和进刀等工艺动作.其中动力头由凸轮机构通过齿轮传动带动齿条上下平稳地运动,则动力头可带动钻头平稳地上下移动从而保证了较高地加工质量.进刀机构负责动力头地升降,送料机构将被加工工件推入加工位置,并由定位机构使加工工件可靠固定.三个执行构件地运动形式为:1.进刀机构动力头做垂直地往复直线运动,下移到最低点后立刻上移.在下移之前有一段休止时间,此段时间则用于送料和定位夹紧.其中动力头地行程为15mm.2.送料机构做水平地往复运动,工作行程是40mm.初始时,送料机构迅速地将被加工工件送到指定加工位置,稍作停顿后立即返回,且其在工件地加工过程中保持休止.3.定位夹紧机构在水平面内做近似垂直直线运动,在工件地加工过程中对工件起固定地作用.其中夹紧装置地垂直行程为20mm.功能分解图:→3. 主运动机构选型与分析比较根据前述设计要求:送料机构应做往复运动,并且必须保证工作行程中有快进、休止和快退过程;定位夹紧机构有休止、快进及夹紧、休止和快退过程;进刀机构有休止、快进、工进、快退和休止过程.此外三个机构之间还要满足随着凸轮轴转角不同完成动作地过程不同且相互配合.这些运动要求不一定完全能够达到,但必须保证三者之间相互满足凸轮不同角度时地完好配合,以及送料机构地往复运动和进刀机构地往复循环与各个机构地间歇运动.4.1减速传动功能方案A:采用定轴轮系减速传动.由于传动比=输入转速/输出转速=480传动比过大,故用二级减速传动.其中带传动起过载保护作用.方案A4.2进刀机构功能方案B:采用一个直动滚子从动件盘行凸轮机构并结合滑块导杆传递齿轮齿条机构.进刀时,凸轮在推程阶段运行,其通过机构传递带动齿轮齿条啮合,进而带动动力头完成钻孔.导杆垂直移动地距离即为齿轮弧转动地角度,且齿轮齿条传动具有稳定性.方案B4.3送料机构功能方案C:采用一个直动滚子从动件盘行凸轮机构来完成送料机构地往复运动.通过凸轮机构和导杆滑块实现送料时地快进、休止和快退地动作.由于采用了杠杆,故其能够完成送料地较大传动距离.其中弹簧起到复位作用.方案C4.4定位夹紧机构功能方案D:采用一个摆动滚子从动件盘行凸轮机构.通过凸轮机构实现定位夹紧时地休止、快进及夹紧和快退地动作.由于采用了杠杆,夹紧装置可对工件施加较大地夹紧力保证完成定位夹紧地功能.方案D5. 机械系统传动方案方案地设计为:半自动钻床地变速机构采用带传动和定轴轮系地二级减速器,相比采用行星轮系传动,该方法地选用更加经济,成本相对较低.结构较为简单.机构地送料机构采用直动滚子从动件盘行凸轮机构.盘形凸轮机构把转动动力输入给导杆利用杠杆转化为杆件地往复运动.同时设计凸轮尺寸来满足滑块地间歇运动和快进快退地变速运动.机构地定位夹紧机构由凸轮机构结合连杆来夹紧工件,并按要求设计凸轮地外形尺寸以满足间歇运动.机构地进刀机构由凸轮机构和圆弧齿轮与齿条啮合,并采用连杆带动.先把回转运动动力转化为圆弧齿轮地往复摆动,将运动通过齿轮传递给齿条.其中增加至两个齿轮地目地是为达到使传动更加平稳可靠地目地.采用地半自动钻床地系统方案图如下图所示:半自动钻床系统方案图6. 主运动机构尺度综合6.1减速传动机构地设计计算Z1=20,Z2=80,Z3=20,Z4=100;则齿轮传动比i14=(Z2 Z4)/(Z1 Z3)=20蜗轮蜗杆传动比i=72其中,带传动地两皮带轮半径均为100mm综上所述,减速传动机构地传动比i=1440≈1450设计定轴轮系传动机构地相应参数如下表:齿轮参数6.2进刀机构地设计计算进刀机构如图B所示,快进行程20mm,工进行程15mm各杆尺寸如下:CD=50mm,BC=20mm,CE=50mm,EF=125mm圆弧齿条设计如下:计圆形齿条,根据刀头地行程和凸轮地摆角,设计出圆形齿轮地半径r=l/β,由β=18°,l=20mm,得到r=63.69mm两相同齿轮设计:m=2,齿数z=25,压力角=20°齿条设计:m=2,z=40,压力角=20°凸轮设计:基圆半径r b=50mm,最大压力角αmax=29°,最小曲率半径ρmin=20mm.其位移曲线、凸轮廓线和从动件地初始位置见A1图纸.6.3送料机构地设计计算送料机构如图C1所示,根据要求,进料机构工作行程为40mm,各杆尺寸如下:AB=100mm,BC=50mm,CD=50mm送料机构凸轮设计:基圆半径r b=50mm,最大压力角αmax=23°,最小曲率半径ρmin=32mm.其位移曲线、凸轮廓线和从动件地初始位置见A1图纸.6.4定位夹紧机构地设计计算定位机构如图D1所示,定位机构行程为30mm各杆尺寸如下:AB=50mm,BC=100mm,CD=50mm,DG=20mm,BF=20mm定位机构凸轮设计:基圆半径r b=50mm,最大压力角αmax=28°,最小曲率半径ρmin=25mm.其位移曲线、凸轮廓线和从动件地初始位置见A1图纸.7. 机械系统运动循环图钻头地快进、工进和快退为进刀机构地一个运动循环.在此运动循环过程中应该保证定位夹紧机构和送料机构在时间和凸轮转动角度上相互协调.根据半自动钻床各执行机构地运动要求,绘制机构系统地运动循环图如下:机械系统运动循环图8. 设计总结通过本次为期一周半地机械原理课程设计,在感受到了设计过程地艰辛地同时也收获了丰富地经验.相比于在机械工程方面地感性直观认识地认识实习和金工实习,本次课程设计则主要集中于理性地分析和设计思考.从开始地感觉无处下手,到在老师地悉心指导和组员们地帮助下,根据任务书和指导书上地要求,并结合地理论知识和查阅大量资料地顺利完成课程设计任务.机械原理是研究机械中机构地结构和运动,以及机器地结构、受力、质量和运动地学科.人们一般把机构和机器合称为机械.机构是由两个以上地构件通过活动联接以实现规定运动地组合体.机器是由一个或一个以上地机构组成,用来做有用地功或完成机械能与其他形式地能量之间地转换.其作为机械类或近机械类中重要地一门专业基础课,对于后续地专业学习有着重要地作用.本次课程设计使我更加深入地了解了一些简单机构地元件地作用,更加深入地接触到了关于机械原理和设计等地要领和技能,这无疑为今后地深造奠定了良好地基础.在设计内容繁多地情况中,我深深地体会到了合作地重要性.在设计过程中我和组员们遇到过很多新鲜而棘手地问题,而没有办法独立解决.这时作为一个团队,其发挥了重要地作用.组员们一起讨论、规划和设计,思维地火花彼此碰撞,不仅增强了团队意识,更加深了对机械机构原理地不同角度地清晰认识.大量地图形地绘制对每个组员提出了较高地绘图技能要求.能够熟练地运用CAD等绘图软件无疑在设计效率上更胜一筹,同时操作CAD 也成为了一种在机械专业地基本技能.其次,本次课程设计无形中要求将理论知识融入实践设计中,并涉及到用自己所掌握地理论知识逐个解决在机械设计中遇到地各种问题.在以后地学习工作中,应具备严谨地态度和着眼实践地思想.同时应逐渐培养坚韧地精神,以在繁琐地机构设计过程中保持良好地心态.通过不断地实践实习巩固已有地理论基础知识,以便在此基础上进行创造性地机械设计,得到更为高效、便捷、经济地机械系统.9. 参考资料[1]孙桓,陈作模.机械原理[M].北京:高等教育出版社,2001.[2]孟宪源.现代机构手册[M].北京:机械工业出版社,1994.[3]彭文生,李志明,黄华梁.机械设计[M].北京:高等教育出版社,2008.[4]唐增宝,常建娥.机械设计课程设计[M].武汉:华中科技大学出版社,2006.版权申明本文部分内容,包括文字、图片、以及设计等在网上搜集整理.版权为个人所有This article includes some parts, including text, pictures, and design. Copyright is personal ownership.7EqZc。
半自动钻床设计说明书

半自动钻床送料装置设计摘要钻床是制造业中使用最多最常见的机械加工设备。
它广泛地应用于机械制造的各行各业,是机械加工中不可缺少的加工工具。
它的用户几乎包罗了国民经济各部门,量大面宽。
钻床种类繁多,型式多样,多用于机械外壳孔、板料孔、横梁孔的加工,价值由几千元到几十万元不等。
由于半钻自动床具有很多的优点,与普通钻床相比有较高的自动化,提高了生产效率,降低了工人的劳动强度,提高了加工精度,与数控钻床相比价格较便宜,因此半钻自动床是中小型企业的首选产品。
应用半自动钻床加工中小批量零件,快捷高效,是机械加工的发展方向。
本次设计的半自动钻床主要用于机械零件的钻孔,是在零件上完成相应的尺寸孔的加工。
它的执行机构有四个:一是实现送料分功能运动的机构是移动从动杆圆柱凸轮机构作往复移动,实现送料所需的运动。
二是实现定位功能运动的是盘形凸轮机构,移动从动件控制定位挡块伸缩,实现定位功能。
三是实现夹紧功能运动的机构是盘形凸轮机构,从动件未端用高副与移动滑块相连,滑块控制夹具夹紧和松开,实现夹紧功能。
四是实现进刀功能运动的是摆动从动件盘形凸轮机构,摆杆的另一端串联一个平行四边形机构和齿轮齿条机构,控制钻头上下往复移动,实现进刀功能。
关键字:半自动钻床、送料机构、定位机构、夹紧机构、进刀机构- 1 -半自动钻床送料装置设计AbstractSemi-automatic drilling machine is the largest industrial use of the most common processing machinery parts. It is widely used in machinery production, manufacture of all walks of life, is an indispensable machining processing tools. It covers the user almost all sectors of the national economy, large wide. China's economic construction is now booming, semi-automatic drilling machinery plant in the bed at any time everywhere. Bed semi-automatic drilling a wide range of diverse types are used for mechanical shell holes, sheet metal hole hole beam processing, the value of a few thousand dollars to tens of thousands dollars. Semi-automatically as a result of drilling of the bed there are many advantages compared with ordinary drilling machine for a higher automation, reducing labor intensity and improve the machining accuracy. Compared with the numerical control drilling machine cheap bed semi-automatic drilling is the preferred products of small and medium enterprises.Application of semi-automatic drilling machine batch processing of small and medium-sized parts, fast and efficient is the development direction of machining. The semi-automatic drilling machine designed primarily for the drilling machine parts, spare parts to complete in the corresponding size of the processing hole. Its four implementing agencies: First, to achieve functional feeding movement is moving cylindrical cam follower rod for reciprocating movement of feed required to achieve movement. The second is the realization of the campaign is targeting cam agencies, mobile Follower block telescopic positioning control, to achieve positioning. Third, the campaign to achieve clamping function is disc-shaped cam, driven by high-end pieces of vice and move the slider connected to the slider control and release the clamping fixture to achieve clamping function. Feed four to achieve functional movement is oscillating follower cam, shot before the other side of a parallelogram Series rack and pinion agencies and institutions to control the bit up and down reciprocating movement to achieve functional feed.Keywords: semi-automatic drilling machine, feed bodies, body positioning, clamping bodies, institutions Feed- 2 -半自动钻床送料装置设计目录第1章概述 (5)1.1 前言 (5)1.2 设计任务分析 (5)1.2.1 工作原理及工艺动作过程 (5)1.2.2 原始数据及设计要求 (5)1.2.3 任务分析 (6)第2章机械运动分析 (9)2.1 系统功能分解 (9)2.1.1按工艺动作可分解为四个功能机构: (9)2.1.2各机构的执行构件和运动形式: (9)2.1.3根据执行构件的运动形式选择机构 (9)2.1.4 功能分解图: (10)2.1.5功能原理工艺过程分解 (11)2.2 绘制机械系统运动转换功能图 (13)2.2.1 确定运动方案及机械运动循环图功能原理: (13)2.3 用形态学矩阵法创建机械系统运动方案 (13)第3章运动方案分析 (14)3.1 运动方案的选择与比较 (14)3.2 机械系统运动方案简图 (15)第4章机械传动系统设计 (16)4.1 电动机的选择 (16)4.2 减速器的选择与计算 (17)4.2.1 计算总传动比并分配传动比 (17)4.2.2 减速器 (18)4.2.3 减速功能: (21)第5章主要零部件的设计计算 (21)5.1 凸轮的设计 (21)5.1.1 圆柱凸轮的参数: (21)5.1.2 送料凸轮轮廓线及其运动曲线 (24)5.1.3 定位夹紧凸轮轮廓线及运动曲线 (25)5.1.4 夹紧凸轮轮廓线及运动曲线 (27)5.1.5 进刀夹紧凸轮轮廓线及运动曲线 (28)5.2 执行机构设计 (30)5.2.1 进刀机构: (30)5.2.2 送料机构: (31)5.2.3 定位机构: (31)5.2.4 夹紧机构: (32)5.3 带传动计算 (33)5.4 蜗轮蜗杆传动计算 (35)5.5齿轮传动计算 (37)- 3 -半自动钻床送料装置设计5.6轴的校核 (40)5.7 轴的弯扭合成强度的校核 (41)第6章机械运动最终方案简图 (45)设计总结 (47)参考文献谢辞- 4 -半自动钻床送料装置第1章概述1.1 前言设计即是解决问题,它从在每个人的日常生活和各种职业中,意为寻找问题的答案。
半自动立式钻床安全操作及保养规程

半自动立式钻床安全操作及保养规程前言半自动立式钻床在机械制造行业中有着广泛的应用,但是它的操作和维护对于使用者来说至关重要。
本文将详细介绍半自动立式钻床的安全操作及保养规程,以确保机器的安全操作和延长使用寿命。
安全操作规程1. 安装半自动立式钻床应安装在平坦坚固的地面上。
在安装的过程中请确保钻床各部位的机构部件安装牢固、平稳,螺丝是否紧固,管道是否联通。
切勿在底座上拆开内铁皮扩孔或改动底座结构,因为这样会使机器的稳定性降低,容易引起危险,且可能会造成机器损坏,延长维修时间。
2. 操作前准备开机前请先检查钻床的紧固件是否松动,各部位是否有异响、漏油、堵塞等情况,观察液压油温度、液位情况等是否正常。
检查工件夹紧情况,钻头夹持力量是否适当等。
3. 操作•操作前切勿戴手套、手表、项链等物品。
操作人员应戴上工作帽和劳动服,穿戴符合作业要求的劳保用品。
•操作者要持续关注机器的运行状况,注意保持稳定操作,不要盲目乱动,以免发生意外。
•在操作过程中切勿随意调整机器装置,能自动调整或电动自动调整的机器的调节要关注产品说明书,电动调节时要保持手和调节机构夹持装置的距离2m以上。
不能超负荷工作,不得超过电动机额定负载,以免对机器造成损害。
4. 停机停机指钻床工作到目标后将设备关闭,遵循以下指引: * 关闭电源开关,打开电箱门检查运行指示灯是否熄灭。
由于其他操作被使钻床处于工作状态,在关电脑前一定要先停机。
* 在工作场合,必须同时关闭电源、门锁装置以及电源供应的气路阀门等装置,确保操作者不会因操作错误而危及自己的健康。
保养规程1. 润滑半自动立式钻床需要润滑来保持各部位的好运转状态和延长机器寿命。
在钻床使用前、进口零部件保养期间或重要保养周期到时,需对设备进行润滑。
对于润滑油,应选择规定型号和牌号的润滑油,润滑油应定期更换。
2. 清洁钻床工作时会产生大量的铁屑和液压油,这些杂物堵塞机器零部件的空隙,降低设备的运转品质,严重时还会对设备造成损坏,严重时还会引起危险。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录设计任务书-----------------------------------------------------21.设计工作原理--------------------------------------------------42.功能分解图,执行机构动作分解图-----------------------63.运动方案的选择与比较---------------------------------------94.机构运动总体方案图(机构运动简图)-----------------105.工作循环图------------------------------------------------------166.执行机构设计过程及尺寸计算------------------------------187.凸轮设计分段图.轮廓图.设计结果---------------------218.机构运动分析计算机辅助设计流程------------------------259.程序清单(主程序和子程序)------------------------------2610.十一运行结果及运动线图------------------------------------3111.设计总结----------------------------------------------------------3212 参考资料----------------------------------------------------------33设计任务书一、设计题目及原始数据设计加工所示工件ф12mm 孔的半自动钻床。
进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构使被加工工件可靠固定。
二、设计要求及方案提示要求设计该半自动钻床的送料、定位、及进刀的整体传动系统。
其中:1.钻头由动力头驱动,设计者只需考虑动力头的进刀(升降)运动。
2. 除动力头升降机构外,还需要设计送料机构、定位机构。
各机构运动循环要求见下表。
3. 可采用凸轮轴的方法分配协调各机构运动。
机构运动循环要求表10º 20º 30º45º 60º75º 90º105º~270º300º360º送料 快进 休止 快退 休止 定位 休止快进休止快退 休止 进刀休止 快进快进快退休止三、设计任务1.半自动钻床至少包括凸轮机构、齿轮机构在的三种机构;2.设计传动系统并确定其传动比分配,并在图纸上画出传动系统图;3. 图纸上画出半自动钻床的机构运动方案简图和运动循环图;4.凸轮机构的设计计算。
按各凸轮机构的工作要求,自选从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。
对盘状凸轮要用电算法计算出理论廓线、实际廓线值。
画出从动件运动规律线图及凸轮廓线图;5.设计计算其他机构;6.编写设计计算说明书;一、所设计的机构工作原理一.机构的工作原理:该系统由电机驱动,通过变速传动将电机的1450r/min降到主轴的2r/min,与传动轴相连的各机构控制送料,定位,和进刀等工艺动作,最后由凸轮机通过齿轮传动带动齿条上下平稳地运动,这样动力头也就能带动刀具平稳地上下移动从而保证了较高的加工质量,具体的选择原理和工作原理如下:二.机的选择原理(1)原动机的分类原动机的种类按其输入能量的不同可以分为两类:A一次原动机此类原动机是把自然界的能源直接转变为机械能,因此称为一次原动机。
属于此类原动机的有柴油机,汽油机,汽轮机和燃汽机等。
B二次原动机此类原动机是将发电机等能机所产生的各种形态的能量转变为机械能,因此称为二次原动机。
属于此类原动机的有电动机,液压马达,气压马达,汽缸和液压缸等。
(2)选择原动机时需考虑的因素:1:考虑现场能源的供应情况。
2:考虑原动机的机械特性和工作制度与工作相匹配。
3:考虑工作机对原动机提出的启动,过载,运转平稳,调速和控制等方面的要求。
4:考虑工作环境的影响。
5:考虑工作可靠,操作简易,维修方便。
6:为了提高机械系统的经济效益,须考虑经济成本:包括初始成本和运转维护成本。
综上所述,在半自动钻床中最益选择二次原动机中的电动机作为原动件。
三.传动机构的选择和工作原理(1)传动机构的作用1:把原动机输出的转矩变换为执行机构所需的转矩或力。
2:把原动机输出的速度降低或提高,以适应执行机构的需要。
3:用原动机进行调速不经济和不可能时,采用变速传动来满足执行机构经常调要求4:把原动机输出的等速回转运动转变5:实现由一个或多个动力机驱动或若干个速度相同或不同的执行机构。
6:由于受机体的外形,尺寸的限制,或为了安全和操作方便,执行机构不宜与原动机直接连接时,也需要用传动装置来联接。
(2)传动机构选择的原则1:对于小功率传动,应在考虑满足性能的需要下,选用结构简单的传动装置,尽可能降低初始费用。
2:对大功率传动,应优先考虑传动的效率,节约能源,降低运转费用和维修费用。
3:当执行机构要求变速时,若能与动力机调速比相适应,可直接连接或采用定传动比的传动装置;当执行机构要求变速围大。
用动力机调速不能满足机械特性和经济性要求时,则应采用变传动比传动;除执行机构要求连续变速外,尽量采用有级变速。
4:执行机构上载荷变化频繁,且可能出现过载,这时应加过载保护装置。
5:主,从动轴要求同步时,应采用无滑动的传动装置。
6:动装置的选用必须与制造水平相适应,尽可能选用专业厂生产的标准传动装置,加减速器,变速器和无级变速器等。
二.功能分解图,执行机构动作一.功能分解图如下图图3-1二绘制机械系统运动转换功能图3-2三.执行构件的选择1.减速传动功能选用经济成本相对较低,而且具有传动效率高,结构简单,传动比大的特点,可满足具有较大传动比的工作要求,故我们这里就采用行星轮系来实现我设计的传动。
2.定位功能由于我们设计的机构要有间歇往复的运动,有当凸轮由近休到远休运动过程中,定位杆就阻止了工件滑动,当凸轮由远休到近休运动过程中可通过两侧的弹簧实现定位机构的回位,等待送料,凸轮的循环运动完成了此功能。
、3.进料功能进料也要要求有一定的间歇运动,我们可以用圆锥齿轮来实现换向,然后通过和齿轮的啮合来传递,再在齿轮上安装一个直动滚子从动件盘型凸轮机构,用从动件滚子推杆的直线往复运动实现进料。
4.进刀功能采用凸轮的循环运动,推动滚子使滚子摆动一个角度,通过杠杆的摆动弧度放大原理将滚子摆动角度进行放大.可增大刀具的进给量,在杠杆的另一端焊接一个圆弧齿轮,圆弧齿轮的摆动实现齿轮的转动,齿轮的转动再带动动力头的升降运动实现进刀.四.用形态学矩阵法创建机械系统运动方案根据系统的运动转换功能图(图3-2)可构成形态学矩阵如表(表3-3)。
由表3-3所示的形态学矩阵可以求出半自动钻床系统运动方案数为:3×3×3×3×3×3=729根据功能原理,工艺分解过程及执行机构的选择,确定了以下运动方案,三.运动方案的选择与比较方案的分析与比较:(1) 减速机构:由于电动机的转速是1450r/min,而设计要求的主轴转速为2r/min,利用行星轮进行大比例的降速,然后用圆锥齿轮实现方向的转换。
图4-1(3)对比机构:对比机构:定轴轮系传动;传动比=n输入/n输出=700 传动比很大,要用多级传动。
如图4-2.图4-2(3) 进刀机构采用一个摆动滚子从动件盘行凸轮机构来传递齿轮齿条机构.因为我们用一个摆动滚子从动件盘行凸轮机构来传递齿轮机构,当进刀的时候,凸轮在推程阶段运行,很容易通过机构传递带动齿轮齿条啮合.带动动刀头来完成钻孔,摆杆转动的幅度也是等于齿廓转动的幅度,两个齿轮来传动也具有稳性。
图4-3(4)对比机构:在摆杆上加一个平行四边行四杆机构,这样也可以来实现传动,但是当加了四杆机构以后并没有达到改善传动的效果,只是多增加了四杆机构,为了使机构结构紧凑,又能完成需要的传动,所以选择了一个摆动滚子从动件盘行凸轮机构。
图4-4(5)送料系统:采用一个六杆机构来代替曲柄滑块机构,由于设计的钻床在空间上传动轴之间的距离有点大,故一般四杆机构很难实现这种远距离的运动。
再加上用四杆机构在本设计中在尺寸上很小。
所以考虑到所设计的机构能否稳定的运行因此优先选用了如下图的六杆机构来实现。
由于本设计送料时不要求在传动过程中有间歇,所以不需要使用凸轮机构。
如图4-5。
图4-5(6)对比机构:所选用的对比四杆机构如下图(图4-6),由于在空间上轴与轴之间的距离较大,但选用下来此四杆的尺寸太小。
故优先选用六杆机构。
图4-6(7)定位系统:定位系统采用的是一个偏置直动滚子从动件盘型凸轮,因为定位系统要有间歇,所以就要使用凸轮机构,但如果是平底推杆从动件,则凸轮就会失真,若增加凸轮的基圆半径,那么凸轮机构的结构就会很大,也不际,所以就采用一个偏置直动滚子从动件盘型凸轮,它就可以满足我们的实际要求了。
图4-7(8)对比机构:采用弹力急回间歇机构来代替偏置直动滚子从动件盘型凸轮,它是将旋转运动转换成单侧停歇的往复运动。
这样也可以完成实际要求,但是为了使设计的机构结构紧凑,又能节省材料,所以还是选偏置直动滚子从动件盘型凸轮来完成定位。
图4-8四.机构运动总体方案图(机构运动简图)根据前面表3-3中实线连接的方案的运动简图确定本设计中半自动钻床的总体方案图如图5-1图5-1五.工作循环图图5-1所示的机械系统方案的执行件需要进行运动协调设计其运动循环如图6-1凸轮轴转角00~10001000~15001500~27002700~30003000~3600送料快进快退定位休止快进休止快退进刀休止快进慢进休止快退图6-1六.执行机构设计过程及尺寸计算1.送料机构机构采用如下分析送料连杆机构:采用如下机构来送料,根据要求,进料机构工作行程为40mm,可取ABCD4杆机构的极位夹角为12度,则由1)1( 180+-⨯=K Kθ得K=1.14,急回特性不是很明显,但对送料机构来说并无影响。
各杆尺寸:(如图6-1)AB=8.53 BC=84.42 CD=60 DA=60 CE=40 EF=8该尺寸可以满足设计要求,即滑块的左右运动为40,ABCD的极位夹角为12度。
图6-12.凸轮摆杆机构的设计:(1).由进刀规律,我们设计了凸轮摆杆机构,又以齿轮齿条的啮合来实现刀头的上下运动;(2).用凸轮摆杆机构和圆弧形齿条所构成的同一构件,凸轮摆杆从动件的摆动就可以实现弧形齿条的来回摆动,从而实现要求;采用滚子盘行凸轮,且为力封闭凸轮机构,利用弹簧力来使滚子与凸轮保持接触.刀具的运动规律就与凸轮摆杆的运动规律一致;(3).弧形齿条所转过的弧长即为刀头所运动的的距离。