一体化智能司钻终端
·修井用钻台机械手设计与仿真

2023年第52卷第6期第47页石油矿场机械犗犐犔 犉犐犈犔犇 犈犙犝犐犘犕犈犖犜2023,52(6):47 53文章编号:1001 3482(2023)06 0047 07修井用钻台机械手设计与仿真关春丽(胜利油田胜机石油装备有限公司,山东东营257000)摘要:修井作业过程中,需要对管柱进行大量的起下、排放作业,劳动强度大、安全风险高。
钻台机械手能够实现管柱在操作平台与排放架之间的移送操作,可有效提高作业效率,降低劳动强度,提升修井作业自动化水平,为此研制了一种专门用于修井作业的钻台机械手,并对钻台机械手的结构、主要技术参数、技术特点进行了阐述。
采用静力学分析方法对臂架各构件进行受力分析,验证臂架满足强度理论要求;运用ADAMS软件对臂架伸展推扶管柱过程进行运动仿真,为钻台机械手臂架轨迹控制及变幅油缸计算选型提供依据,验证了钻台机械手水平推力及推扶半径满足技术参数要求。
修井用钻台机械手的成功研制及推广应用,促进了大修自动化管柱处理系统的发展。
关键词:修井;钻台机械手;静力学分析;运动仿真;ADAMS中图分类号:TE935 文献标识码:A 犱狅犻:10.3969/j.issn.1001 3482.2023.06.006犇犲狊犻犵狀犪狀犱犛犻犿狌犾犪狋犻狅狀狅犳犇狉犻犾犾犉犾狅狅狉犕犪狀犻狆狌犾犪狋狅狉犳狅狉犠狅狉犽狅狏犲狉犗狆犲狉犪狋犻狅狀GUANChunli(犛犺犲狀犵犾犻犗犻犾犳犻犲犾犱犛犺犲狀犵犼犻犗犻犾犈狇狌犻狆犿犲狀狋犆狅.,犔狋犱.,犇狅狀犵狔犻狀犵257000,犆犺犻狀犪)犃犫狊狋狉犪犮狋:Intheprocessofworkoveroperation,itisnecessarytocarryoutalotoftrippinganddischargingoperationsonthepipestring,whichhashighlaborintensityandhighsafetyrisk.Thedrillfloormanipulatorcanrealizethetransferoperationofthepipestringbetweentheoper atingplatformandthedischargerack,whichcaneffectivelyimprovetheoperationefficiency,reducelaborintensity,andimprovetheautomationlevelofworkoveroperation.Adrillfloorma nipulatorspeciallyusedinwellworkoveroperationwasdeveloped.Thestructure,maintechnicalparameters,andtechnicalcharacteristicsofthedrillfloormanipulatorweredescribed.Thestaticanalysismethodwasusedtoanalyzetheforceofeachmemberoftheboom,verifyingthattheboommetthestrengththeoryrequirements.ADAMSsoftwarewasusedtosimulatetheprocessofextendingandpushingthepipestring,providingabasisforcontrollingtheboompathandcal culatingandselectingthevariableamplitudecylinder,aswellasverifyingthatthehorizontalthrustandpushingradiusofthemanipulatormettherequirementsofthetechnicalparameters.Thesuccessfuldevelopmentandpopularizationofdrillfloormanipulatorsforworkoverhavepro motedthedevelopmentofanautomaticworkoverstringhandlingsystem.犓犲狔狑狅狉犱狊:workover;drillfloormanipulator;staticanalysis;motionsimulation;ADAMS 近年来,随着修井作业装备应用技术的不断发展,油田对修井作业提速提效、降低人工成本、减轻 收稿日期:2023 06 08 基金项目:中国石油化工股份有限公司科研项目“大修自动化作业及一体化全电驱修井技术装备研制”(SINOPEC2020制20200603)。
石油钻井中交流变频电动机及其控制系统的应用

石油钻井中交流变频电动机及其控制系统的应用摘要:随着中国对石油能源需求的增加,石油开采的环境变得越来越复杂,增加了石油开采的难度。
在石油开采过程中,交流变频电机的应用可以使石油开采更加简单高效,因此有必要加强对交流变频电机的分析。
关键词:石油钻机;交流变频电机;控制设备;被广泛应用于现代工业的交流变频电机,拥有无法被替代的优势,以该电机为研究对象,以石油钻机为切入点,围绕电机和控制系统的应用,展开了系统而深入的分析,内容涉及交流变频电机驱动的优点分析,交流变频电机控制系统分析等方面,望能够给有关人员以启发,使交流变频电机所具有的积极作用在钻井作业中得到充分发挥。
一、交流变频电动机交流变频电动机是一种特殊的变频电动机,交流变频电动机在具体应用中与一般变频电动机相比具有以下特点:(1)在设计中所使用的绝缘材料采用的为抵抗变频器谐波突破的特殊材料,提高交变频电动机的性能。
(2)结构设计和电磁设计与一般变频电机相比较特殊。
在石油钻井中应用交流变频电动机与直流钻机和机械钻机相比,在钻井过程中,对交流变频调速技术进行合理应用,可以很好的适应石油钻井在工艺上的具体要求,并且使钻机的机械结构得到了进简化,减少了对钻井机械的保养,使设备的可靠性和安全性得到进一步提高。
此外,交流变频电动机还具有质量轻、体积小、故障少等诸多优点,因此在石油钻井中需要加强对其的应用,提高石油钻井的工作效率。
二、交流变频电动机及其控制系统的应用1.交流变频石油钻机。
(1)石油钻机钻进原理。
石油钻机用于石油或天然气资源的钻采过程,运行过程中钻机带动钻具击碎岩石向下钻进,辅助完成地下资源的开采。
现阶段,国内外石油开采中常用的钻井方式为旋转钻井,即将钻头旋转击碎岩石,形成钻井结构。
然后利用钻杆将钻头探入到钻井底部,通过转盘或驱动装置带动钻头及钻杆旋转,钻井泵向井内输送钻井液,并将井底碎石带回到地面,再利用吊车等大型设备完成钻具安置。
(2)交流变频石油钻机。
自动化智能化石油钻井系统
五、实现自动化智能化钻井系统的地面关键设备—智能司钻控制系统 1、智能司钻控制系统技术方案 智能司钻控制系统是基于神经网络控制技术,现场总线技术,信息网络技术集成于一 体的全数字化、智能化、网络化、可视化、高度集成化的控制系统。
随钻测量数据实时与钻时预测数据进行比较和修正,使钻井专家系统模型更加科学和合 理。
钻井信息化:钻井现场的钻井工程数据、井眼轨迹数据、随钻测井数据、录井数据、设 备运行以及故障信息、井场视频信息等通过无线网络(如卫星网、GSM网络)实时传送到 公司总部,现场工程师和总部的地质师、地球物理师、油藏工程师、设备工程师,可随时参 与和协同工作,设计井眼轨道、调整钻井措施、确定完井策略等提出专家会诊决策指令意见, 反馈到钻井队,实现实时最优化钻井施工,还可使钻井和油藏地质人员“透视”地下三维图 像实时监督正钻井和待钻井的井眼轨迹。
井身结构及随钻轨迹控制:采用钻柱下部组装的随钻测井工具和各类传感器,如地层 电阻率ρ、岩性特征测量探头伽玛γ、中子-密度探头 N-D、声波探头 S、核磁共振探头 NR、 地层空隙压力 P、井斜角θ、方位角α和导向工具面的工具面角ω、钻头井底钻压 pb、井底 转数 n、井底扭矩 Tb、钻柱不同截面处的测力传感器等等,采集并经过处理后准确得到真实 的地层剖面完整资料。主要可包括地层岩性和密度、储层特性及标志层、气顶、油层、夹层、 油底等岩性及其深度、地层流体深度和流体压力、流体性质、实钻三维井身轨迹、钻柱及其 各组配件与钻头的实时工况、井下钻井动态工况等,这些数据与地震、SWD、测井、工程录 井等方法及数据库中的信息,运用软件进行综合分析与整合集成,解释处理得出待钻井段优 化的技术参数及决策,并与设计井身结构地质和工程模型时刻比较,使井下执行工具准确动 作。
ZJ90DB使用说明书
ZJ90DB 钻机使用说明书及维护手册
断电。作业期间,应有专人看管电气开关(电闸),使其始终处于断开状 态。电控系统、电路的维护和检修作业必须两人以上。
9. 提升 提升和移动物体时,应充分考虑提升设备能力和被移动物体重量的比率。人 员应当远离被提升和移动的物体,任何情况下人员都不允许位于被提升的物体下 方。 9. 溶剂或染料的使用 在特定的安全的储存器中储存少量的干净的溶剂或染料。一些溶剂或染料可 能对皮肤、眼睛、呼吸系统有害。使用时必须遵守制造厂家的警告和安全指示。 并且只允许在通风和被允许的区域内使用。废弃的被溶剂或染料污染的抹布必须 放入特定的处理器中。 11. 压缩空气的使用 使用压缩空气的设备即使当压缩空气压力已降低到小于 30psi 时,也有可能 产生一个掺杂微粒的环境。因此使用压缩空气时必须带上有效的切屑防护器和个 人防护设备。而且决不允许压缩空气口对着自己和别人。 12. 移动件
当操作移动件时手、头发、衣服、首饰、抹布和工具应当远离之。 13. 可见度 当可见度不高时,不允许操作该设备。包括日出以前或日落之后都不允许操 作,除非有合适有效的光源。 14. 起动前 在起动该设备之前要确保所有控制元件都在合适的位置(开、关、中等)。 在起放该设备井架时风速要求≤8.3m/s(16knots)。 15. 工作区域 在操作该设备时要保持工作区域干净,不得有障碍物、手动工具和其它物体。 16. 动火要求 在该设备安装和拆卸的过程中,允许动火(电焊、气焊等)。但是在操作过程 中动火要远离危险区域,并且要征得有关人员的同意。
本使用维护手册对产品的安装、使用、维护与保养给出了相应指南。 本使用维护手册的使用对象是对钻井设备(或其他设备)具有一定知识、熟 悉的操作人员和技工,因此本使用维护手册并非预期涵盖了可能遇到的每一种情 况。 部分设备操作和维护资料取自各制造厂商的手册。如果该制造商颁布了新的 使用维护手册,或者有矛盾,除非另有规定,该制造厂商的资料优先于本手册给 出的资料。 本公司保留在任何时候废止(或更改)产品型号、而无须通知,也不负任何 责任和义务。 本使用维护手册未经本公司同意,不得提供给第三方,否则对所产生的后果 要负法律责任。 本使用维护手册虽经详细的审校,但仍可能有不妥之处,敬请指正。 安装、使用产品前,请仔细阅读本使用维护手册!
ZJ30DB14钻机操作

ZJ30/1700DB钻机操作手册AZ303120-00CZ宝鸡石油机械有限责任公司ZJ30/1700DB钻机是宝鸡石油机械有限责任公司根据用户的要求,为满足油田深井勘探开发的要求而新设计开发的一种AC-DC-AC交流变频电传动全数字控制钻机。
该钻机可用于3000m井深的钻井作业。
钻机设计符合GB/T 23505-2009《石油钻机和修井机》标准及API有关的规范。
为了使油田有关操作人员熟悉和掌握本钻机的使用,使用说明书中对钻机作了全面概括的介绍。
因钻机配套内容较多,说明书仅叙述了钻机主机部件的内容,对于用户自备的装置或部件作了必要的简明介绍。
在使用时所需的关于配套设备(或部件的)结构参数和使用维护等项内容以及相关的资料,详见配套设备的使用说明书和其他有关的技术文件。
在使用本钻机以前,参与此项工作的管理人员、技术人员和操作者必须仔细阅读本钻机配套的全部说明书和相关技术资料,了解并熟悉所有的细节,此外还要具备相应的安全操作知识和技能。
所有的活动应符合HSE(健康、安全、环境)的要求。
全部的管理工作和具体操作还应按照本系统、本单位相关的规章制度要求执行。
本公司可以根据服务人员的反馈信息、技术改进或更新的需要,随时对产品的型式、参数、结构进行改变。
事先或事后并不通知,也不为此而承担任何责任和义务。
本钻机随机附带了完整的技术文件提供给本设备的购买者及使用者作为管理、安装、使用、维护等方面的指导资料。
任何人不得以任何方式进行复制,也不得提供给第三方,否则对所产生的后果要负法律责任。
前言 (I)第1章概述 (1)1.1用途及特点 (1)1.2钻机设计引用文件 (1)1.3钻机技术参数 (2)1.4钻机布置与传动简介 (4)第2章钻机主机部件及配套系统 (8)2.1JC-30DB3绞车 (8)2.2转盘驱动装置 (15)2.3F-1300机泵组 (17)2.4TC-170天车 (17)2.5YG-170游车大钩 (19)2.6SL170水龙头 (20)2.7JJ170/42-K井架 (20)2.8DZ170/6-T底座 (22)2.9钻机空气系统 (23)2.10一体化钻井仪表系统 (29)2.11井口机械化工具 (30)2.12高压管汇 (30)2.13司钻偏房 (30)2.14司钻控制房 (30)2.15动力系统 (31)2.16电传动控制系统 (31)第3章钻机的安装及调试 (32)3.1钻机安装前的准备工作 (32)3.2钻机基础 (33)3.3钻机的安装 (33)3.4钻机安装后的检查 (36)3.5钻机调试 (36)3.6钻机起升 (38)第4章钻机的使用 (40)4.1警示 (40)4.2钻机使用注意事项 (40)4.3操作与维护保养 (40)第5章拆卸及运输 (43)5.1井架下放 (43)5.2钻机拆卸 (44)5.3钻机运输 (44)第6章关于防碰装置的重要提示 (45)第1章概述ZJ30/1700DB钻机是为满足油田深井勘探开发和出国承包钻井的要求而新设计开发的一种AC-DC-AC交流变频电传动全数字控制钻机。
聚焦油气勘探开发核心需求_加快构建石油工程技术新体系

聚焦油气勘探开发核心需求加快构建石油工程技术新体系新中国成立后,尤其是改革开放以来,我国油气关键技术装备不断发展突破,形成较为完整的研发、制造、销售和服务体系,市场竞争力、国际影响力不断提升,打造了一批大国重器,油气勘探开发自主能力增强,为实现能源保供作出了重要贡献。
当前,在全球新一轮科技革命和产业变革大背景下,要坚持国家战略目标,聚焦提高科技发展质量,面向油气勘探开发主战场,加强关键核心技术攻关,加速科技成果产业化,提高关键环节和重点领域创新能力,重点研发具有先发优势的关键技术和引领未来发展的基础前沿技术,推动油气工程技术装备向高端化、智能化、绿色化发展。
油气工业发展史是一部科技创新史,工程技术进步则是油气行业发展的巨大推动力。
老一辈艰苦奋斗,筑牢我国油气工业发展根基中国近代油气工业发展缓慢,工程技术装备与西方先进水平差距扩大。
新中国成立后,老一代石油人通过艰苦卓绝的奋斗,筑起油气工业发展根基,建立了钻机装备和井下工具制造厂,实现部分工程装备的国产化。
随着大庆、胜利等大油田的发现,油气工程技术装备规模迅速扩大。
改革开放后,通过引进、技术交流、合作研发及系列重大科研项目攻关,中国油气工业不断取得重大工程技术突破,与国外先进水平差距大幅度缩短,满足了国内勘探开发技术需求,实现“走出去”战略目标。
我国陆上深层油气资源量占比34%,是油气增储上产的重要领域。
几十年来,围绕深层超深层油气工程技术持续攻关,关键技术装备取得重大进展,形成全系列钻机装备生产能力,支撑由“钻井大国”迈向“钻井强国”。
1966年钻成第一口深井松基6井,1976曾义金中国石化集团公司首席专家油气工程技术向“更深、更快、更经济、更绿色、更安全、更智能”的方向发展,企业要发挥创新主体作用,担当起国家战略科技力量,强化原创技术策源地、未来产业关键技术装备攻关。
”“年钻成第一口超深井四川女基井,2021年钻成第一口特深井塔深5井。
塔里木、四川盆地特深层油气勘探开发不断取得重大突破,正在探索“万米深地油气资源”新领域。
国内一代7000米自动化钻机配套规范

国内一代7000米自动化钻机配套规范按照“两年一代、六年三代”的总体部署,2018年、2019年更新钻机为第一代新型钻机。
配置目标是:立足现有成熟产品,试验配套井口自动化设备,推广应用直驱技术,减少固控级数,优化井场辅助设备设施,改善一线员工生产生活环境,进一步降低员工劳动强度。
配套规范如下:一、钻机主体结构(一)采用宝石机械7000米电动钻机前开口K型井架、旋升式底座、绞车低位安装的形式,井架配套液压高支架,底座预留导轨式和步进式两种平移接口,底座过井口高度可满足避让1.8米高井口装置的要求。
(二)五家钻探企业各在自动化钻机上推广应用1台四川宏华石油设备有限公司(以下简称“四川宏华”)的直驱顶驱;常规顶驱采用北石厂大扭矩产品,满足强化技术参数要求。
(三)西部钻探和渤海钻探各在1部自动化钻机上推广应用1台宝美电气的直驱绞车;常规钻机绞车由两台800kW 交流变频电机驱动,采用两档单减速箱绞车、双边盘刹布置;采用宝石机械成熟产品。
盘刹液压站与绞车一体化集成设计;盘刹采用河北任丘博科机电新技术有限公司的成熟产品。
(四)转盘采用宝石机械800kW交流变频电机直驱转盘。
(五)泥浆泵组采用F-1600HL高压直驱泵组,双交流变频直驱电机驱动。
(六)钻机所有管线布置要整洁、美观。
二、井口自动化装备2018年、2019年更新的全自动化钻机配置整套井口自动化装备,包括二层台机械手、液压吊卡、钻台机械手、铁钻工、气动卡瓦(刮泥器一体式)、液压猫道、液压排管架;其余钻机配置部分井口自动化装备,包括二层台机械手、液压吊卡、钻台机械手、气动卡瓦(刮泥器一体式),并预留其他井口自动化装备接口。
各部件配置要求如下:(一)二层台及排管机械手整套设备必须满足宝石井架的安装和起升要求,整套装置重量控制在8吨以内;采用三一石油智能设备有限公司(以下简称“三一石油”)产品。
(二)液压吊卡适应最大51/2”钻杆,吊卡电缆和管线与顶驱电缆和管线集成;采用江苏如通石油机械股份有限公司(以下简称“江苏如通”)产品。
DT20型铁钻工电液控制系统的研制
2024年4月地质装备D T 20型铁钻工电液控制系统的研制孙军盈,朱江龙*,王春蕾,宋志亮,黄江涛,刘颖毅,马亦农(中地装(北京)科学技术研究院有限公司,北京 100120)摘 要:D T 20型铁钻工是一种安全㊁高效㊁全电液控制的自动化拧卸工具,其控制系统是在地质拧卸装备和电气自动化控制的基础上,开发的适合于地质行业专有工艺的铁钻工电液控制系统㊂本文主要介绍了D T 20型铁钻工的电气控制系统㊁液压系统和上卸扣的工艺与控制流程,为地质钻探自动化装备的相关研发人员提供一定的参考和借鉴㊂关键词:铁钻工;拧卸机具;自动化钻机;电液控制中图分类号:P 634 文献标识码:A 文章编号:1009282X (2024)02000705T h e d e v e l o p m e n t o f e l e c t r o -h y d r a u l i c c o n t r o l s y s t e m f o r D T 20i r o n r o u gh n e c k S U N J u n y i n g Z H U J i a n g l o n g *W A N G C h u n l e i S O N G Z h i l i a n g H U A N G J i a n gt a o L I U Y i n g y i M A Y i n o n gC h i n a G e o l o g i c a l E q u i p m e n t R e s e a r c h I n s t i t u t e C o L t d B e i j i n g 100120 C h i n a A b s t r a c t D T 20i r o n r o u g h n e c k i s a s a f e e f f i c i e n t a n d f u l l y e l e c t r o -h y d r a u l i c c o n t r o l l e d a u t o m a t i c u n s c r e w i n gt o o l I t s c o n t r o l s y s t e m i s d e v e l o p e d b a s e d o n g e o l o g i c a l u n s c r e w i n g e q u i pm e n t a n d e l e c t r i c a l a u t o m a t i o n c o n t r o l a n d i s s u i t a b l e f o r t h e i r o n r o u g h n e c k e l e c t r o -h y d r a u l i c c o n t r o l s y s t e m o f g e o l o g i c a l c o r e d r i l l i n g T h i s p a p e r m a i n l y i n t r o d u c e s t h e e l e c t r i c a l c o n t r o l s ys -t e m h y d r a u l i c s y s t e m m a k i n g -u p &b r e a k i n g -o u t p r o c e s s a n d c o n t r o l f l o w o f t h e D T 20i r o n r o u gh n e c k w h i c h c a n b e u s e d a s r e f e r e n c e f o r t h e r e s e a r c h a n d d e v e l o p m e n t p e r s o n n e l o f g e o l o g i c a l d r i l l i n g a u t o m a t i o n e q u i pm e n t K e yw o r d s i r o n r o u g h n e c k m a k i n g -u p a n d b r e a k i n g -o u t t o o l a u t o m a t i c d r i l l e l e c t r i c -h y d r a u l i c c o n t r o l s y s t e m 收稿日期:20230610基金项目:国家重点研发计划项目(编号:2018Y F C 0603402) 作者简介:孙军盈(1984-),男,高级工程师,从事地质钻探装备自动化开发工作,E -m a i l :ju n _i n @f o x m a i l .c o m ㊂ *通信作者:朱江龙(1974-),男,教授级高级工程师,从事地质钻探装备开发工作,E -m a i l :z h u j i a n g l o n g @c g e g.c o m .c n ㊂0 引言近年来,随着深孔地质钻探工程日益增多,钻具组合也变得越来越复杂,起下钻的频率也在不断增加,常规地质钻杆动力钳已逐渐无法满足钻机自动化发展的需求[1-4]㊂铁钻工作为动力钳的升级替代产品,具有操作简单㊁井口无需配置人员等特点,司钻可以通过电子手柄或遥控器进行远程操作,还可配合其他井口自动化工具实现一键上卸扣作业[6-12]㊂虽然石油钻机铁钻工发展较快且应用案例较多,但石油钻井与地质岩心钻探存在较大差异,其铁钻工无法直接应用于地质钻具拧卸㊂D T 20型铁钻工是国家重点研发项目 5000米地质岩心钻机关键技术与装备研制 的重要成果之一,适用于地质钻探过程中接卸钻杆㊁钻铤作业,其夹持范围为89~150m m ,且无需更换牙板㊂D T 20型铁钻工通过电液控制完成对各动作的控制,设备本体带有可编程逻辑控制器,既可以作为独立产品进行应用,也可以通过工业以太网与钻机配套使用,具有结构紧凑㊁布线简单㊁扩展性强等特点[13-17]㊂通过井场试验,对其控制功能和可靠性进行了验证,证明其可以节省钻井作业辅助时间㊁降低劳动强度和提高作业效率㊂1 D T 20铁钻工组成1.1 总体结构D T 20铁钻工主体主要包括以下部分:底座㊁升7孙军盈等:D T 20型铁钻工电液控制系统的研制第25卷 第2期降桅杆㊁桅杆滑架㊁伸缩臂㊁吊篮滑架㊁夹持卸扣器㊁液压总成㊁本体控制箱,见图1㊂图1 D T 20型铁钻工主机组成F i g .1 T h e m a i n c o m p o s i t i o n o f D T 20i r o n r o u gh n e c k 1.2 主要参数(表1)表1 D T 20型铁钻工主要参数T a b l e 1 T h e m a i n p a r a m e t e r s o f D T 20i r o n r o u gh n e c k 冲扣钳适应钻杆(钻铤)范围/m m 89~150冲扣钳最大卸扣转矩/(N ㊃m )33000冲扣钳最大上扣转矩/(N ㊃m )16000冲扣钳拧卸角度/(ʎ)30旋扣钳适应钻杆(钻铤)范围/m m 89~150旋扣钳最大旋扣转矩/(N ㊃m )4000旋扣钳最大旋扣速度/(r ㊃m i n-1)90铁钻工伸缩位移/m m 1850铁钻工升降位移/m m1000液压系统最大压力/M P a18液压系统最大排量/(L ㊃m i n-1)1402 电液系统控制方案D T 20型铁钻工液压控制阀采用高性能的电比例阀和开关阀,阀体带手动释放手柄㊂控制系统以西门子高性能的S 71200系列C P U 为控制核心,通过现场总线技术把本体控制器㊁遥控接收器和钻机远程控制器组成通信网络,实现远程司钻操作㊁就地应急操作㊁便携式遥控器操作㊁人机界面状态显示和参数设定等功能㊂2.1 液压系统原理D T 20型铁钻工液压系统控制的动作有背钳松紧㊁主钳拧卸扣㊁钳头伸缩㊁主钳松紧㊁旋扣钳松紧㊁钳头升降㊁旋扣器拧卸扣㊂铁钻工的三联电比例阀组和四联开关电磁阀组均通过电子技术进行控制㊂通过安装急停㊁液压缸位置和压力检测元件,系统具备精确控制扭矩㊁一键上卸扣功能㊂2.2 控制系统组成控制系统由本体控制箱㊁本体操作台㊁遥控器㊁传感器㊁急停及电磁阀等组成㊂本体控制箱固定在铁钻工本体立柱上,跟随升降机构同步运动,控制系统的核心P L C 安装在其内部㊂传感器㊁急停及电磁阀等信号接入本体控制箱,并通过现场总线与一体化司钻座椅进行通信连接㊂2.3 电液控制模式D T 20型铁钻工具备本地操作方式㊁远程一体化司钻座椅控制和便携式遥控器控制三种控制模式㊂本体控制箱预留总线接口,通过配置通信参数,铁钻工与一体化司钻座椅进行通信,司钻房一体化司钻座椅如图2所示㊂图2 一体化司钻座椅F i g .2 I n t e gr a t e d d r i l l e r s e a t 同时,为了独立运行铁钻工㊁方便副司钻更加灵活地控制,配置了如图3所示的便携式遥控器㊂图3 便携式遥控器F i g.3 P o r t a b l e r e m o t e c o n t r o l 本地操作采用液压手柄的操作台方式进行操控,操作台安装在钳头右侧(面对钳头),本体操作台82024年4月地质装备外形如图4所示㊂图4本体操作台F i g.4M a i n c o n s o l e2.4控制系统硬件设计铁钻工工作在指定的区域,需要考虑安装调试及维护的便捷性,故采用模块化设计,将铁钻工电气组成分为若干个模块,包括高防护等级的接插件㊁电源模块㊁P L C控制器㊁信号隔离及转换模块等,控制系统的总架构如图5所示㊂2.5软件控制策略铁钻工在切换冲扣与旋扣工艺时,需要单独控制冲扣钳的松开㊂夹持方式汇总为3条指令,分别是旋扣钳夹持与松开㊁背钳与冲扣钳同时夹持与松开㊁冲扣钳单独松开㊂所有动作包括:立柱升降㊁伸缩臂伸缩㊁旋扣钳夹持与松开㊁旋扣回转㊁冲扣钳夹持与松开㊁冲扣钳紧扣与松扣㊂图5控制系统架构F i g.5C o n t r o l s y s t e m f r a m e w o r k(1)手动上卸㊂手动控制铁钻工进行上卸扣作业是铁钻工最基本的功能要求,手动方式具有操作灵活的优势,也有因为操作步骤多㊁工序复杂及人为随意性带来的劣势,手动上卸扣操作步骤与自动上卸扣流程基本相同㊂(2)自动上卸㊂手动上卸扣时,需要操作人员实时观察上卸扣流程中每一步的运行状态,频繁的上卸扣操作十分消耗操作人员的精力[4-5]㊂D T20型铁钻工在保留手动操作的基础上,针对频繁㊁枯燥的上卸扣作业,研制了自动上卸扣功能,基于安全考虑,自动上卸扣的流程可以随时手动终止,自动上扣流程图如图6所示㊂图6自动上扣流程图F i g.6F l o w c h a r t f o r a u t o m a t i c m a k i n g-u p c o n n e c t i o n自动上扣操作时,立柱升降和伸缩臂的伸缩动作相对比较危险,在手动控制立柱高度和伸缩臂到位后,通过一体化司钻座椅或者遥控器发送自动上扣指令,铁钻工本体P L C将自动执行上扣流程程序,其中每一步的执行依赖主机本体安装的传感器进行判断,例如冲扣模式的背钳和冲扣钳的夹持,是通过各自的压力传感器判断是否夹紧,在夹紧压力达到设定压力后程序自动转到下一步作业程序㊂自动上扣功能在一定程度上减轻司钻人员工作强度,并能保证设定的拧紧力矩,从而减少人工操作所带来的拧紧力矩差异㊂自动卸扣流程与自动上扣流程基本相似㊂9孙军盈等:D T 20型铁钻工电液控制系统的研制第25卷 第2期2.6 HM I 人机界面基于铁钻工动作和传感器设置,兼顾实用性和易用性,开发出的HM I 界面如图7所示㊂图7 H M I 界面F i g.7 H M I i n t e r f a c e 界面按照功能类别分区如下:①界面切换及急停指示,该区域包括主界面与铁钻工界面的切换㊁本体和远程急停的状态显示㊂②运行点位显示,铁钻工在运行时,控制系统通过传感器检测到动作的运行状态㊂③实时显示冲扣钳的紧扣扭矩㊁松扣扭矩㊁旋扣转速和左右手柄的动作状态㊂④参数设定区域,包括操作模式选择功能㊁互锁保护及复位功能㊂默认情况下,操作模式为手动方式,自动方式的旋扣时间可以自行设定;系统复位功能可以将铁钻工的所有命令清除,在自动上卸扣时,可以随时暂停并恢复至初始步骤;系统互锁是在手动方式时,开启或关闭互锁保护功能,例如,伸缩臂和升降机构动作时需要判断旋扣钳和冲扣钳的状态,在传感器出现故障或者维护时,可以临时关闭系统互锁功能㊂⑤HM I 手动操控区,该区域包含了铁钻工的所有液压动作控制命令,区域内的控件只有在激活HM I 操作后才有效,在一体化座椅的手柄出现故障或者调试阶段可用此方式进行临时操控㊂⑥运行参数显示,该区域实时显示铁钻工本体运行的压力参数,包括系统压力㊁夹持压力等,方便司钻人员实时掌握铁钻工运行状态㊂3 施工应用D T 20型铁钻工通过厂内试验,并在国家重点研发项目 5000米智能地质钻探技术装备研发及应用示范 的示范工程中进行了生产试验,见图8㊂生产试验中,铁钻工整体运行良好,电液控制系统稳定㊁操作安全,具备一键上卸扣功能,符合设计要求,达到了设计预期,满足试验和生产需求,为钻探施工带来了极大的便利并提升了工作效率㊂图8 铁钻工现场施工F i g .8 I r o n r o u gh n e c k s o n s i t e 4 结语D T 20型铁钻工的开发研制,为地质岩心钻机的自动化发展做出了一次尝试㊂通过对其电液控制系统的研究和测试,为国内进一步对铁钻工的研制迭代提供借鉴和参考,主要结论归纳如下:(1)多操作模式可提高铁钻工的适配性和兼容性㊂本系统提供了本地操作台㊁远程一体化司钻台座椅㊁便携式无线遥控器三种控制模式㊂无论作为单个产品使用,还是集成在钻机控制系统中,多操作控制模式在集成灵活性㊁用户体验和安全性等方面都具有显著的优势㊂(2)精准控制扭矩,一键上卸扣功能能够减轻司钻人员的工作强度并降低潜在的施工风险㊂针对地质钻杆的特点,要求铁钻工必须能够精准控制扭矩,减少手动上卸扣的操作,尽量优化一键上卸扣流程,为司钻人员提供更加便捷和高效的操作体验,使整个钻探过程更加安全㊁高效和可靠㊂(3)D T 20型铁钻工虽然初步具备自动上卸扣功能,但仍需继续完善,如:自动上扣时,对钻杆的对扣精准判断;上卸扣时,对旋扣完成条件的判断㊁伸缩臂自动定位等㊂该系统的试制为适用于地质钻探的铁钻工国产化的发展提供一定的技术参考㊂参考文献(R e f e r e n c e s):[1] 张洪生,于昊,赵金峰.铁钻工的现状与展望[J ].石油矿场机械,2008,37(1):1216.12024年4月地质装备Z H A N G H o n g s h e n g,Y U H a o,Z H A O J i n f e n g.T h e s i t u a t i o n a n d f o r e c a s t o f i r o n r o u g h n e c k[J].O i l F i e l dE q u i p m e n t,2008,37(1):1216.[2]郝山波.I R N-120型铁钻工的研制[J].新型工业化, 2018,8(8):4750.H A O S h a n b o.D v e l o p m e n t o f I R N-120t y p e i r o n d r i l-l e r[J].T h e J o u r n a l o f N e w I n d u s t r i a l i z a t i o n,2018,8(8):4750.[3]李洪波,王洪川,赵磊,等.伸缩臂式铁钻工的研制[J].石油机械,2014,42(11):1619.L I H o n g b o,W A N G H o n g c h u a n,Z H A O L e i,e t a l.D e v e l o p m e n t o f t e l e s c o p i c-a r m i r o n r o u g h n e c k[J].C h i n a P e t r o l e u m M a c h i n e r y,2014,42(11):1619.[4]尹玉刚,高加索,陈丽琴,等.煤层气钻机旋转式轻便铁钻工的研制[J].石油机械,2014,42(2):1418.Y I N Y u g a n g,G A O J i a s u o,C H E N L i q i n,e t a l.R e-s e a r c h o n t h e r o t a r y l i g h t i r o n r o u g h n e c k f o r C B Md r i l l i n g r i g[J].C h i n a Pe t r o l e u m M a c h i n e r y,2014,42(2):1418.[5]张勇,刘清友,陈小伟.新型轻便式铁钻工的研制[J].石油矿场机械,2007,36(9):7375.Z H A N G Y o n g,L I U Q i n g y o u,C H E N X i a o w e i.D e-v e l o p m e n t o f n e w m o v a b l e r o u g h n e c k[J].O i l F i e l dE q u i p m e n t,2007,36(9):7375.[6]康亮,李亚伟,黎善猛,等.石油钻机管柱处理系统研究现状和发展趋势分析[J].液压气动与密封, 2019,39(5):110.K A N G L i a n g,L I Y a w e i,L I S h a n m e n g,e t a l.R e-s e a r c h p r e s e n t s i t u a t i o n a n d d e v e l o p m e n t t r e n d a n a l y-s i s o f p i p e l i n e h a n d l i n g s y s t e m f o r d r i l l r i g[J].H y-d r a u l i c s P ne u m a t i c s&S e a l s,2019,39(5):110.[7]李静.石油钻机自动化发展探讨[J].山东工业技术, 2015(9):7980.L I J i n g.D i s c u s s i o n o n t h e d e v e l o p m e n t o f o i l r i g a u t o-m a t i o n[J].S h a n d o n g I n d u s t r i a l T e c h n o l o g y,2015(9):7980.[8]南树歧,邹庆波,李伦,等.一体化铁钻工设计开发及关键技术研究[J].石油机械,2018,46(10): 1822.N A N S h u q i,Z O U Q i n g b o,L I L u n,e t a l.D e s i g n o f a n i n t e g r a t e d r o u g h n e c k a n d i t s k e y t e c h n o l o g i e s[J].C h i n a P e t r o l e u m M a c h i n e r y,2018,46(10):1822.[9]景佐军,徐小鹏,南树歧,等.铁钻工旋扣钳碳纤维滚轮优化与试验[J].机械工程师,2021(3):7578. J I N G Z u o j u n,X U X i a o p e n g,N A N S h u q i,e t a l.O p t i-m i z a t i o n a n d T e s t i n g o f t h e C a r b o n F i b e r R o l l e r i n a nI r o n R o u g h n e c k s S p i n n e r[J].M e c h a n i c a l E n g i n e e r, 2021(3):7578.[10]黄悦华,李洪波,王正磊,等.伸缩臂式铁钻工旋扣钳的设计研究[J].石油机械,2014,42(7):2831.H U A N G Y u e h u a,L I H o n g b o,W A N G Z h e n g l e i,e t a l.D e s i g n o f t e l e s c o p i c i r o n r o u g h n e c k s p i n n e r[J].C h i n a P e t r o l e u m M a c h i n e r y,2014,42(7):2831.[11]叶强,闫文辉,李慧莹,等.伸缩臂式铁钻工冲扣钳的设计[J].液压气动与密封,2018,38(6):811.Y E Q i a n g,Y A N W e n h u i,L I H u i y i n g,e t a l.D e s i g n o f i r o n r o u g h n e c k t o r q u e w r e n c h[J].H y d r a u l i c s P n e u-m a t i c s&S e a l s,2018,38(6):811. [12]赵金峰.T Z G216110型铁钻工控制系统的研制[D].兰州:兰州理工大学,2008.Z H A O J i n f e n g.D e v e l o p m e n t o f T Z G216110i r o n r o u g h n e c k c o n t r o l s y s t e m[D].L a n z h o u:L a n z h o uU n i v e r s i t y o f T e c h n o l o g y,2008.[13]朱永庆,罗磊,李峰,等.基于P L C的铁钻工电气系统设计[J].机械工程师,2015(8):8284.Z H U Y o n g q i n g,L U O L e i,L I F e n g,e t a l.E l e c t r i c a l s y s t e m d e s i g n o f i r o n d r i l l e r b a s e d o n P L C[J].M e-c h a n i c a l E n g i n e e r,2015(8):8284.[14]廖常初.S71200P L C编程及应用(第3版)[M].北京:机械工业出版社,2017.L I A O C h a n g c h u.S71200P L C P r o g r a m m i n g a n dA p p l i c a t i o n(3r d e d i t i o n)[M].B e i j i n g:C h i n a M a c h i n eP r e s s,2017.[15]李海军,王春光,刘宇.基于P L C的电液比例电气控制系统设计[J].内蒙古农业大学学报(自然科学版), 2010,31(2):269272.L I H a i j u n,W A N G C h u n g u a n g,L I U Y u.T h e d e s i g n o f e l e c t r o-h y d r a u l i c p r o p o r t i o n a l v a l v e o f E C S b a s e d o n P L C[J].J o u r n a l o f I n n e r M o n g o l i a A g r i c u l t u r a l U n i-v e r s i t y(N a t u r a l S c i e n c e E d i t i o n),2010,31(2): 269272.[16]何军国.铁钻工研制技术路线研究[J].河南科技, 2018(2):4749.H E J u n g u o.S t u d y o n T e c h n o l o g y o f I r o n R o u g h n e c kD e v e l o p m e n t R o u t e[J].J o u r n a l o f H e n a n S c i e n c e a n dT e c h n o l o g y,2018(2):4749.[17]廖常初,陈晓东.西门子人机界面(触摸屏)组态与应用技术(第2版)[M].北京:机械工业出版社,2008.L I A O C h a n g c h u,C H E N X i a o d o n g.S i e m e n s m a n-m a-c h i n e i n t e r f a c e(t o u c h s c r e e n)c o n f i g u r a t i o n a n d a p p l i-c a t i o n t e c h n o l o g y(2n d e d i t i o n).B e i j i n g:C h i n a M a-c h i n e P r e s s,2008.11。
司钻防提断装置—关井井控防误操作装置

司钻防提断装置—关井井控防误操作装置司钻防提断装置是一种用于钻井过程中防止钻杆提断的装置,其工作原理是利用气动控制系统将钻杆与旋转装置之间的空气压力平衡,从而达到防止钻杆提断的效果。
该装置是钻井作业中必不可少的安全设备之一,其能够有效地保障钻井作业人员和设备的安全,提高钻井作业的效率和质量。
关井井控防误操作装置是一种用于钻井过程中防止误操作的装置,其工作原理是采用机电一体化控制系统,通过操作台上的按钮和开关控制井口的开启和关闭,从而防止因误操作而导致的人员伤亡和设备损坏。
该装置是一种高度安全性的控制系统,能够有效地避免钻井过程中由于误操作而产生的事故和延误,是每一个钻井工人必须熟练掌握的关键装置之一。
司钻防提断装置的工作原理:司钻防提断装置主要由气动控制系统和机械装置两部分组成。
在钻井过程中,钻杆在旋转装置的带动下进行钻进作业。
如果钻杆在钻井过程中受到沉积物或其他障碍物的阻挡而产生提断现象,那么司钻防提断装置就会自动启动,通过气动控制系统来实现防止钻杆提断的目的。
当钻杆发生提断时,司钻防提断装置会自动接收到信号,并迅速将气动控制系统中的空气压力平衡,从而使钻杆不会继续受到外力的作用而发生更大的损坏。
除此之外,司钻防提断装置还能够在条件允许的情况下,对被卡钻杆进行抽出作业,进一步延长钻杆的使用寿命。
关井井控防误操作装置采用机电一体化控制系统,包括中央处理器、触摸屏、按钮和开关等多个部分。
在钻井作业中,操作员通过触摸屏对井口进行开启和关闭的操作,来控制钻井作业的进展。
如果由于误操作而导致井口未能及时关闭,那么关井井控防误操作装置就会自动启动,发出警报声并在一定时限内强制关闭井口,从而防止事故的发生。
关井井控防误操作装置还可以通过控制井口的开启和关闭来控制钻井液的污染和消防灭火等工作,具有多重安全功能。
在运行过程中,关井井控防误操作装置还会将各种状态信息实时传送到中央处理器,方便操作员进行监控和控制,提高了钻井作业的安全和效率。
一体化司钻控制系统房正压防爆使用说明书2016.6.24

石油钻机用正压防爆电气柜(箱)使用说明书宝美电气工业2009年9月1 概述石油钻机用正压防爆电气柜(箱)(以下简称电气柜)是根据GB3836.1《爆炸性气体环境用电气设备第1部分:通用要求》;GB3836.2《爆炸性气体环境用电气设备第2部分:隔爆型“d”》、GB3836.5《爆炸性气体环境用电气设备第5部分:正压外壳型“p”》、;GB3836.15《爆炸性气体环境用电气设备第15部分:危险场所电气安装(煤矿除外)》的规定制成的正压型防爆电气控制柜,其防爆标志为:ExpzdmIIBT4。
该控制柜经国家授权的质量监督检验部门检验合格,并取得了产品防爆合格证。
本电气柜主要适用于石油、化工、冶金、制药等领域的2区爆炸性气体环境,其空气中存在有ⅡB级T4组及以下的爆炸性气体混合物的场所,作为电气控制之用。
2 型号和基本参数2.1 电气柜型号 SZF094136-032.2 基本参数电源: 220VAC/50HZ额定电流: 32A防护等级: IP40防爆标志: ExpzdmIIBT4气源种类:洁净、安全空气气源压力: 0.4~0.8 MPa运行正压: 50 Pa~200Pa正压腔净容积:≤510 L+510L+100L吹扫时间: 30min高压排气:大于200Pa低压进气、报警:小于50Pa3、结构及原理此一体化司钻控制房正压防爆柜主要有电控柜、气控柜、左操作台三个。
电气柜主体由正压外壳、正压气路系统、隔爆型控制箱等几部分组成。
正压外壳是由2.5mm不锈钢板经折边、拼焊而成的气密外壳。
由于它能保持部保护气体的压力高于外围爆炸性气体环境的压力,从而能有效的阻止外部的爆炸性气体混合物进入外壳部。
在正压外壳正面明显区域有“ExpzdmⅡBT4”红色标志牌。
在正压外壳上安装有若干电缆引入引出装置、气路接头、电器开关等,这些器件的安装不得破坏正压外壳的气密性能;正压气路系统由过滤减压单元、节流阀、防爆电磁阀、管路及接头组成。
90DB司钻房使用说明书

第一章 结构与布局 ....................................... 1 第一节 外部结构 ........................................ 1 第二节 内部布局 ........................................ 1 一、 辅助控制台 ...................................... 1 二、电控柜 ............................................ 2 三、工作座椅 .......................................... 4
第五节 监视系统 ....................................... 16
第四章 操作规程 ........................................ 21 第一节 巡回检查 ....................................... 21 一、巡回检查路线 ..................................... 21 二.检查内容 ......................................... 21 三、注意事项 ......................................... 23 第二节 交接班检查 ..................................... 23
为了保证钻机的使用者能熟练掌握该钻机各系统设备的性能和操作特点, 以达到最大程度发挥变频钻机的优势,满足各种复杂钻井作业的需求,编者在 编写过程中,主要参考了有关钻机资料,并收集来自各方面的意见和建议,使 本手册能为现场工作人员解决实际问题,以达到其编写目的。
石油钻机中电子司钻的应用
石油钻机中电子司钻的应用
雷创国;邓月婷;李拉练
【期刊名称】《电气传动自动化》
【年(卷),期】2008(30)3
【摘要】介绍了电子司钻的几个重要功能,如PLC控制系统、钻井监控系统、一体化显示仪表、电子防碰、液压盘式刹车装置等,并讲述了这些系统在现代电驱动钻机中的重要作用、优越性及其未来的发展趋势.
【总页数】3页(P47-48,51)
【作者】雷创国;邓月婷;李拉练
【作者单位】天水电气传动研究所,甘肃,天水741018;天水电气传动研究所,甘肃,天水741018;陕西宝光真空电器股份有限公司,陕西,宝鸡721006
【正文语种】中文
【中图分类】TP273
【相关文献】
1.浅谈我国石油钻机司钻控制系统存在的问题 [J], 陈波;张旭伟;李冬屹;张嘉新
2.石油钻机司钻控制房正压防爆系统分析与设计 [J], 孙江锋;张文英;游娜;赵博;霍建强;孙景富
3.石油钻机司钻的H点研究 [J], 陈波;张茄新;栾苏;樊春明
4.试论我国石油钻机司钻控制人性化设计 [J], 陈波;张旭伟;李冬屹
5.石油钻机井场标准化电路系统司钻远程操作控制及状态显示设计 [J], 史金红;李庆福;李娜;孔瑞;冯帆;李博;尚卓;杨丰博
因版权原因,仅展示原文概要,查看原文内容请购买。
50DBS钻机司钻操作室使用说明书
1. 前言1.ZJ50DBS司钻控制室是为ZJ50DBS钻机设计的新型司钻控制室。
它融电、气、液、计算机及通讯、人机工程等技术于一体,以舒适的工作环境、简洁的操作界面、人性化的操作方式将司钻从紧张、繁重的体力劳动中解放出来,使司钻专注于钻井工艺,从而有效地保证了安全、提高了生产率。
司钻控制室是由以下三个系统组成的整体:控制系统:包括电控、气控、液控系统。
2. 钻井参数显示控制系统:采用模拟图形和数字方式实时显示悬重、钻压、钻速、泥浆返回流量、泥浆泵冲数、立管压力、转盘转速、转盘扭矩、游车高度、猫头拉力等参数。
监视系统:对二层台、滚筒、振动筛、泵房的监视,司钻与其它操作者之间的通讯。
司钻控制室具有两大特点:参数显示、记录与控制融为一体:不仅可以实现主要钻井参数的实时显示、记录,而且将这些参数融入到钻机控制程序中,实现钻机控制的信息化、智能化。
各种参数进入主控计算机,根据这些参数,司钻可以有效地控制绞车、转盘的运行。
计算机不仅可以自动防止游车的上碰下顿,而且可以实现游车的上提、下放的精确定位。
还实现了非常精确的主动式恒钻压自动送钻。
气控、液控均采用电磁阀控制:将常用的手动操作阀改为电磁阀控制,大大节省了安装空间;电磁阀采用各种转换开关和按钮控制,面板布置更加紧凑、合理;灵敏度更高的电磁阀使控制更加可靠。
2. 结构说明司钻控制室外形尺寸为长3300mm×宽2600mm×高2500mm,主体墙面及操作台为全不锈钢结构。
司钻控制室两侧开门,靠近井口的三面墙体分别安装三块防弹玻璃。
玻璃上沿挂有百叶窗,可避免强烈的阳光直射。
屋顶一块防弹玻璃倾斜一定角度以利于排水并加装遮阳布,当钻机监视系统不能正常工作时,可以满足司钻观察游车位置的需要,在司钻室外每一块玻璃均加装有网形防护装置。
控制室安装有空调。
在司钻室左侧安有梯子,可以利用它上到控制室的屋顶,进行吊装、检修等工作。
控制室底座焊有吊装耳板,屋顶焊有挡绳板,可以满足吊装和运输固定的要求。
ODPT030212-DBS系列数控变频电动钻机
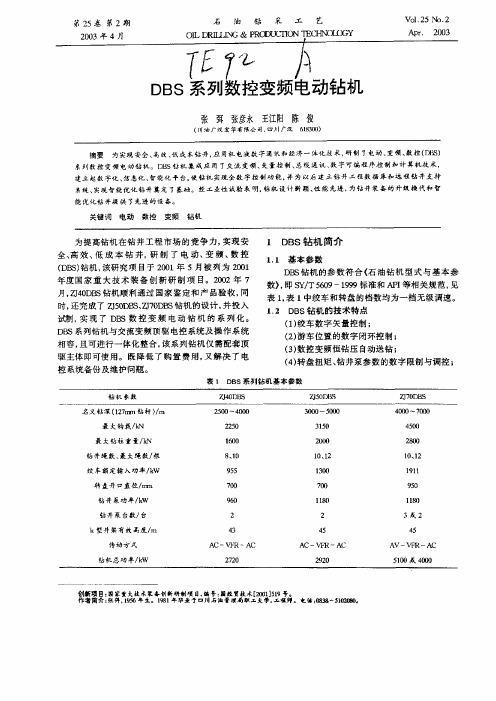
钻井莱功平/w k 钻并 泵台数/ 台 k型井架有效 高度/ m 传动方 式 钻机总功 率/W k
250 溯 朋
m s可提高钻井时效。 /, 333 钻并司钻的转“ .. 型” D S B 钻机先进的数控
4 结论 ( D S系列数控变频电动钻机总体性能优 1 B )
越, 具有明显的价格优势和良好的市场前景。 () 系列数控变频电动钻机、 2 DS B 转盘电驱钻 机和机电复合驱动钻机在我国油气钻井工程中的推 广使用, 将促进钻井装备的升级换代, 推动数控交流 变频技术在我国石油装备设计制造上的运用, 并带 动相关产业的快速发展。
能 优化 钻并提 供 了先进 的设 备。
关铆词 电动
数控
变频
钻机
为提高钻机在钻井工程市场的竞争力, 实现安 全、 高效、 低成本 钻井, 研制 了 电动、 变频、 数控 (B ) D S钻机, 该研究项目于20 年 5 01 月被列为 20 01 年度国家重大技术装备创新研制项 目。20 年 7 02 月, 4D S 刁 0B 钻机顺利通过国家鉴定和产品验收, 同 时, 还完成了Z5D SZ 0 B 钻机的设计, ) B , 7D S 0 J 并投入 试制, 实现 了 D S数控变颇 电动钻机 的系列化。 E D S系列钻机与交流变频顶驱电控系统及操作系统 B 相容, 且可进行一体化整合, 该系列钻机仅需配套顶 驱主体即可使用。既降低了购置费用, 又解决了电
第2 卷 第2期 5
20 03年 4月
石 术2 5 .
OL I , I D LLG& P O U TO R I RDC N
A r 20 p . 0 3
国外自动化钻机发展现状与趋势
3.胜利 石油 管理 局钻 井工 艺研 究院 ,山东 东营 257017)
摘 要 :介 绍 了 国外轻 型 自动化 钻机 ,分析 了绞车及 自动送 钻装 置 、顶部驱动 钻 井装置 、钻 井管柱 自 动化 操作 装置 、一体 化 司钻控 制 系统等地 面 自动化钻 井装 备 的现 状 ,阐述 了地 面 自动化 钻 井装 备 的 发展 趋 势 。 关 键词 :自动化 钻机 ;单轴 绞车 ;顶驱 ;管 子处理 系统 ;电子 司钻 中图分 类号 :TE24 文献标识 码 :B 文章 编号 :1004—5716(2O12)O6—0125—03
2012年第 6期
西部探 矿 工程
智能钻井技术研究现状及发展趋势
智能钻井技术研究现状及发展趋势摘要:由于油气开发逐渐向非常规,低渗透,深层,深水等一系列复杂环境中开展,所以,钻井工程在经济,效率和安全方面都存在着一定程度的困难和挑战。
但是另一方面,随着大数据,人工智能等科学技术的快速发展,智能化的钻井司钻技术也得到很大的帮助和发展。
并且有望实现钻井工程的超前探测、闭环控制和智能导向等多种优点。
很大程度上提高了钻井工程的效率和质量,降低了工程的成本。
所以近年来,智能钻井技术成为我国研究的重要方向之一。
本文就智能钻井技术的现状和应用及发展趋势进行了详细的分析,并且探究了未来的发展方向。
通过加强钻井工程与先进技术,前沿理论相结合,建立先进的钻井技术系统,为今后实现我国复杂油气资源的开发提供有力支撑。
非常具有代表性的价值意义。
关键词:智能钻井技术、研究现状、发展趋势。
引言目前,我国的油气开发领域由传统的常规领域到低渗透,深层等非常规油气资源领域发展。
面临着许多困难和阻碍。
因此,对于处在发展初期可以智能化钻井司钻技术,在安全、效率、技术方面,还很难满足当前的复杂油气开发的需求。
智能钻井技术还有待提高和创新。
智能相关报道显示钻井技术在各方面融合了人工智能,大数据,信息工程等先进技术,能大幅度的提高钻井技术的效率和钻井工程的成本。
但因为很多方面还处于初期阶段,所以与其他国家依然还存在一定的差距。
因此,现就在系统分析智能钻井技术和发展现状的基础上,探究智能钻井技术的重要发展方向和趋势,通过完善体系和理论的研究,实现钻井技术的跨度飞跃目标。
一、井眼轨道智能优化技术井眼轨道智能优化技术利用人工智能算法对井深度和方位角等进行一系列的动态分析和优化。
例如,通过利用遗传算法对造斜点进行了智能优化,其中还包括以网格点作为基础,对井眼轨道进行了相应的优化功能,同时采用了另一种方法是梯度搜索法,而且结合伴随矩阵函数和数值等模拟软件,对分支井眼可能会对井眼轨道造成的影响进行了探讨,并提出了用重复迭代方法对井眼轨道进行智能改善和优化,将单位长度的最大化产能设为目标,建立储存权重图以及对储层的甜点区域进行明确的了解,其中利用了克里金方法,最后还用快速行进法对分支井眼轨道进行了进一步的改进。
电动钻机概述ZJ70DB、50DB、40DB

最大快绳拉力
485kN
提升档位
1+1R
主滚筒尺寸
Φ770×1434mm
刹车盘直径
Φ1520mm
适用钢丝绳直径 Φ38mm
主刹车
液压盘式刹车
辅助刹车
电机能耗制动
四 、主要部件介绍
1、JC70DB绞车
绞车传动流程 绞车由两台700kW 0~2800r/min的交 流变频电机分别经两台二级齿轮减速箱减速 后,驱动单滚筒。在右齿轮箱输出端的另一 侧由一台37kW交流变频电机驱动一台摆线减 速箱,经推盘离合器及一级齿轮减速后带动 单滚筒。正常情况下该装置作为自动送钻用 ,一旦主电机出现异常该装置可以作为应急 用,活动钻具并可提起最大钻柱重量。
四 、主要部件介绍 4、 泵组电机配备
F-1600电动泵组
1台1200kW变频电机
F-1300电动泵组
1台970kW变频电机
四 、主要部件介绍
5、 转盘传动方案
转盘采用独立驱动方式
由1台600kW/500kW交流变频电 机经万向轴直接驱动或经链条箱减速后 驱动转盘,整体沉于钻台面下,并与钻 台面平齐。电机、冷却风机及通风管均 布置在底座内。
ZJ50DB钻机
绞车-2套:
630kW
转盘-1套:
630kW
泵组-2或3套: 1200kW
独立送钻(应急)装置-1套:45 kW ZJ40DB钻机
绞车-2套:
600kW
转盘-1套: 泵组-2或3套:
600kW 1000kW
独立送钻(应急)装置-1套:45 kW
五、电传动控制系统
三、网络系统
以西门子PLC为控制核心, 通过Profibus网络实现变频器、 智能远程司钻台、自动送钻、游 车位置、MCC、和人机界面等设 备的高速通讯,上位计算机实时 监控各系统的运行状态和故障诊 断,构成三级网络系统,留有钻 井仪表的标准接口。还配有PLC 故障时的冗余操作回路。
海洋钻井集成司钻控制系统的设计与应用

NAVAL ARCHITECTURE AND OCEAN ENGINEERING 船舶与海洋工程 2021 年第 37 卷第 1 期(总第 137 期) DOI:10.14056/ki.naoe.2021.01.013海洋钻井集成司钻控制系统的设计与应用王世栋,廖天保,代爽玲,李 浪,张会寅,吴锐锋(广州海洋地质调查局,广东 广州 510760)摘要:钻机的控制和操作日趋复杂,必然会对司钻控制房提出更严苛的整体要求。
“海洋地质十号”钻探船集成司钻控制系统的成功研制有效弥补了国产司钻控制系统操作复杂、不够人性化的缺点。
对该司钻控制系统的总体构成、控制系统设计、钻井功能操作和报警与故障诊断进行分析。
结果表明,“海洋地质十号”钻探船集成司钻控制系统为司钻提供了舒适的工作环境、简捷的操作界面和方便的观察视野,能使司钻更专注于钻井工艺,有效保证其安全性,提高其生产效率。
关键词:司钻房;集成司钻控制系统;钻机中图分类号:TE951文献标志码:A文章编号:2095-4069 (2021) 01-0072-05Design and Application of Integrated Driller Control System for Offshore DrillingWANG Shidong, LIAO Tianbao, DAI Shuangling, LI Lang, ZHANG Huiyin, WU Ruifeng(Guangzhou Marine Geological Survey, Guangzhou, 510760, China)Abstract: The increasingly complicated control and operation of drilling rigs inevitably leads to stricter requirements on the driller control room. The successful development of the integrated control system for the ship HAI YANG DI ZHI 10 effectively makes up for the deficiency of domestic control systems, including too complicated to operate and less user-friendly. This paper analyzes the overall composition, control system design, drilling operation, alarming and fault diagnosis of the driller system. The result shows that the integrated control system on this ship provides comfortable working environment, convenient operation interface and good observation field, which enables the operator to concentrate on the drilling process, so as to ensure safety and improve production efficiency. Key words: driller room; integrated control system; drilling rig0引言司钻房是石油钻机控制与显示系统的核心部件,其性能直接关系到整部钻机的生产效率。
ZJDBS钻机使用说明书
一、概述---------------------------------------------------------------------------1
钻机设计满足配套350~500t顶驱的要求。顶驱在司钻控制室内,便于操作。
钻机配套有固控系统,气源系统,钻井液管汇、固井管汇,钻台机具等其它设备(详见配套清单)
钻机井场布置分为钻台区、泵组区、固控区、动力区、油水区及井场营房区等。
2. 钻机主要技术参数
名义钻深能力(4 1/2″钻杆) 3500kN
绳系ﻩﻩﻩ6×7(顺穿)
钻机井架为K型结构,底座为弹弓式结构,利用绞车动力起升;钻台主要设备及司钻控制室等均可在低位状态下安装。
绞车为单轴齿轮传动结构,主刹车为液压盘式刹车。2台600kW电机通过齿轮箱驱动滚筒,绞车配有45kW辅助驱动装置,用于自动送钻或应急操作;绞车的提升及下放由数控变频能耗制动系统控制。绞车的所有运行参数,包括起下钻速度、大钩位置、各种安全设置等,均实现数字化控制。
转盘由1台600kW变频电机通过角齿传动箱和万向轴驱动,配有转盘惯性刹车,转盘控制系统具备完善的监控和过扭保护功能,保护扭矩值可在0~110%范围内任意设置。
钻机配有2台F-1600泥浆泵,每台泵分别由1台1200kW交流变频电动机驱动。
钻机动力系统配备3台1020kW柴油发电机组,1台辅助发电机组292kW。
底座型式 弹弓式(双升式)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一体化智能司钻终端1 范围本文件规定了石油钻机和修井机用一体化智能司钻操作终端的术语和定义、基本要求、安全要求、硬件设计、软件设计、功能测试,文件归档、包装标识。
本文件适用于石油钻机、修井机等司钻操作终端的设计、制造与测试。
2 规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 191 包装储运图示标志GB/T 4025 人机界面标志标识的基本和安全规则 指示器和操作器件的编码规则GB/T 6388 运输包装收发货标志GB/T 6995.1 电线电缆识别标志方法 第1部分:一般规定GB/T 14048.1 低压开关设备和控制设备 第1部分:总则GB/T 16656.1—2008 工业自动化系统与集成 产品数据表达与交换 第1部分:概述与基本原理 GB/T 19666 阻燃和耐火电线电缆或光缆通则GB/T 20540.2—2006 测量和控制数字数据通信 工业控制系统用现场总线 类型3:PROFIBUS规范 第2部分:物理层规范和服务定义。
GB/T 23507.2 石油钻机用电气设备规范 第2部分:控制系统GB 50254 电气装置安装工程低压电器施工及验收规范DA/T 22 归档文件整理规则IEC TR 61000-4-1 电磁兼容(EMC) 第4-1部分:试验和测量技术 IEC 61000—4系列综述IEEE 802.3—2018 信息技术 系统间的通信和信息交换 局域网和城域网 特殊要求 第3部分: 载波检测多址存取 采用冲突检测(CSMA/CD)的存取方法和物理层规范。
3 术语、定义和缩略语3.1 术语和定义下列术语和定义适用于本文件。
3.1.1一体化 intergration采用功能复用的理念,通过操控多功能键盘、多功能手柄等元件操作设备的方式。
3.1.2操作台 control panel安装钻机和修井机司钻操控元件,与座椅集成于一体,位于座椅左右两侧。
3.1.3按键式操作 push-button operation通过键盘、鼠标等机械操作终端进行指输入的操作方式。
3.1.4触摸式操作 touch operation通过触摸屏进行指令输入的操作方式。
3.1.5网络拓扑 network topology通过传输介质互联计算机和通讯设备的物理布局。
3.1.6一体机 integrated computer将主机集成到显示器,并且可以运行操作软件、通过操作发出操作命令的计算机。
3.1.7控制站 control station由I/O单元、中央处理单元、通讯转换单元等构成,用于进行数据的采集、处理与输出的模块。
3.1.8模式选择 mode selecttion实现座椅司钻模式、管柱操作模式、待机模式等功能的切换。
3.1.9功能键盘 fuction keyboard运行不同的操作界面,实现不同控制功能的按键输入设备。
3.2 缩略语下列缩略语适用于本文件。
DVI 数字信号显示接口(digital visual interface)ESD 急停(emergency shut down)I/O 输入/输出(input/output)PID 比例积分微分(proportion integration differentiation)PLC 可编程控制器(programmable logic controlller)Profibus-DP 分散外围总线(profibus-decentralized periohery)TCP/IP 传输控制协议/因特网协议(transmission control protocal/internet protocal) UDP 用户数据报协议(user datagram protocol)USB 通用串行总线(universal serial bus)VGA 视频图形阵列(video graphics array)4 总则4.1 基本要求:a)智能司钻终端的结构和强度设计应满足承载司钻人员和设备的重量;b)操作、显示元件的布局设计应符合人机工程学的基本要求和操作人员的基本操作习惯;c)可完成操作命令输入、下发、状态参数反馈、急停、麦克风通讯、视频监控系统操作等;4.2 构成元件智能司钻终端宜包含以下部件:座椅、操作台、显示器支架、一体机、控制站、交换机、操作元件等。
5 安全要求5.1 急停功能要求安全急停功能宜包含动力急停、司钻急停、管柱设备急停、泥浆泵急停、盘刹急停。
——动力急停,通过多芯线连接的方式实现钻机和修井机动力源紧急停止功能。
——司钻急停,通过多芯线连接的方式实现钻机和修井机传动单元紧急停止功能。
——管柱设备急停,通过多芯线连接的方式实现钻机和修井机管柱自动化设备紧急停止功能。
——泥浆泵急停,通过多芯线连接的方式实现钻机和修井机泥浆泵紧急停止功能。
——盘刹急停,通过多芯线连接的方式实现钻机和修井机盘刹紧急停止功能。
5.2 驻车功能要求通过多芯线连接的方式将驻车开关信号接入驻车控制系统。
5.3 操作权限5.3.1 根据人员权限的级别和职能,应设立对应的账户和密码。
5.3.2 操作界面和显示信息窗口应与已登录账户人员权限相对应。
5.3.3 同一终端,不允许同时使用多个账号登录。
5.4 报警功能5.4.1 画面具有实时显示报警的功能。
5.4.2 画面中的文本报警信息框应可以在所有界面上显示。
6 硬件设计6.1 机械设计要求6.1.1 操作台设计6.1.1.1 座椅在不安装显示屏支架时的最大回转半径不宜超过750 mm。
6.1.1.2 座椅左右两侧分别设有左操作台和右操作台, 左右操作台尺寸一致,结构对称。
6.1.1.3 按键式操作操作台宜布局如下元件:手柄、功能键盘、麦克风、司钻急停按钮、动力急停按钮、管柱设备急停按钮、泥浆泵急停按钮、驻车开关、扣合指示灯、模式选择开关、盘刹急停按钮、鼠标、数字键盘、视频监控键盘。
6.1.1.4 触摸式操作操作台宜布局如下元件:手柄、麦克风、司钻急停按钮、动力急停按钮、管柱设备急停按钮、泥浆泵急停按钮、驻车开关、扣合指示灯、模式选择开关、盘刹急停按钮、视频监控键盘。
6.1.1.5 左、右操作台内部空间应满足安装操作元件、控制站的需求。
6.1.1.6 操作元器件的间距在不相互干涉的前提下,左右间距宜在(60-70)mm之间;前后间距宜在(70-90)mm之间。
操作手柄的手握部位应与正常操作时前臂处于同一高度,避免手臂长期悬空。
功能键盘与司钻视线的夹角宜在75°-90°之间。
6.1.1.7 操作台宜采用不锈钢或铝合金材质,宜通过采用冲压成型工艺制作;不锈钢材料也可采用板材拼焊制作。
不锈钢表面宜采用抛光处理或烤漆涂装,铝合金表面宜采用阳极氧化处理。
6.1.2 显示屏支架6.1.2.1 显示屏支架安装位置包含两种方式:仅作为显示作用的显示屏支架宜安装在座椅正前方的地板上;带有触摸操作功能的显示屏支架宜安装在左、右操作台外侧。
6.1.2.2 操作终端的显示屏支架,应具有一定的抗震能力,承载能力应≥显示屏和遮光罩总重量的1.5倍。
安装与座椅前侧的显示器支架俯仰角度调节范围宜在±25°之间。
6.1.2.3 安装于座椅正前方的显示屏支架俯仰角度调节应满足显示屏上下方向与司钻视线的夹角在75°-90°之间。
6.1.2.4 安装于座椅操作台外侧的显示屏支架俯仰角度调节应满足显示屏上下方向与司钻视线的夹角在75°-90°之间;左右角度调节应满足显示屏左右方向与司钻视线的夹角在75°-90°之间。
6.1.3 座椅6.1.3.1 座椅承载应满足座椅本体重量、左右操作台重量、司钻人员体重、显示屏及支架重量、控制站重量,并且安全系数按不低于3.0倍进行设计。
6.1.3.2 座椅具有旋转功能,设置有限位装置,满足电缆抗扭和紧急逃生需求。
6.1.3.3 座椅座垫应设有高度调节装置,调节的范围能够实现座椅座垫与操作台的高度差在230 mm -270 mm之间。
座椅坐垫应设有前后调节装置,前后调节距离不宜小于160 mm。
6.1.3.4 座椅应采用皮革座椅。
靠背角度调节范围应满足坐垫与靠背之间的夹角在90°-120°之间。
6.2 电气硬件设计要求6.2.1 总体要求电气控制系统性能应符合GB/T 23507.2的要求。
所有电气元件性能应能满足司钻房内部工作环境,开关类设备应符合GB/T 14048.1的要求。
安装终端的司钻房如果是非整体正压防爆司钻房,操作台、一体机、显示屏要进行正压防爆处理。
6.2.2 一体机6.2.2.1 一体机屏幕宜具有触摸操作功能。
6.2.2.2 处理器应至少满足终端界面和脚本软件稳定运行的需求。
6.2.2.3 网络接口至少包含两个独立的10/100/1000Mbps的RJ45自适应接口和两个USB接口。
6.2.2.4 视频接口宜包含VGA、DVI接口。
6.2.2.5 内置硬盘抗震能力应大于0.5G,防冲击能力大于5G,抗干扰能力符合IEC TR 61000-4-1要求。
6.2.2.6 供电需求宜包含交流110-230 V AC 50/60HZ、直流24V DC ±10%。
6.2.3 显示器6.2.3.1 显示器屏幕宜具有触摸操作功能。
6.2.3.2 显示器尺寸应与一体机一致。
6.2.3.3 输入接口宜包含VGA接口和DVI接口。
6.2.3.4 供电需求宜包含交流110-230 V AC 50/60 HZ、直流24V DC ±10% 。
6.2.4 交换机6.2.4.1 用于环网通讯的交换机应具有故障自动恢复功能,重构时间小于300 ms;用于星形通讯的交换机网口数量至少预留20 %余量;用于运动同步控制网络通讯的交换机应具有IRT模式。
6.2.4.2 通讯模块供电应为24V DC±10%。
6.2.5 控制站6.2.5.1 控制站应具备运算功能、控制功能、通信功能、编程功能、诊断功能。
6.2.5.2 运算功能宜包含逻辑运算、计时、计数、比较、移位、PID等。
6.2.5.3 控制站应支持多种现场总线和标准通信协议,宜包含TCP/IP、Modbus1)。
6.2.5.4 控制站应具备采用离线编程的方式。
编程语言宜包含顺序功能图、梯形图、功能模块图、语句表和结构文本。
6.2.5.5 控制站的I/O点数在计算使用的点数基础上,应再增加备用15 %-25%的点数。
6.2.5.6 控制站的执行速度应至少满足0.1 ms/1000条指令。