SIFT特征
基于SIFT特征点的图像拼接技术研究

基于SIFT特征点的图像拼接技术研究一、本文概述图像拼接技术作为计算机视觉领域的重要研究方向,旨在将多幅具有重叠区域的图像进行无缝连接,生成一幅宽视角或全景图像。
这一技术在许多领域都有着广泛的应用,如遥感图像处理、虚拟现实、全景摄影等。
近年来,随着数字图像处理技术的快速发展,基于特征点的图像拼接方法因其高效性和稳定性受到了广泛关注。
其中,尺度不变特征变换(SIFT)作为一种经典的特征提取算法,在图像拼接中发挥着重要作用。
本文旨在深入研究基于SIFT特征点的图像拼接技术,分析其基本原理、算法流程以及关键步骤,并通过实验验证其在实际应用中的效果。
文章将介绍SIFT算法的基本原理和特征提取过程,包括尺度空间的构建、关键点检测和描述子的生成等。
将详细阐述基于SIFT特征点的图像拼接流程,包括特征匹配、几何变换模型的估计、图像配准和融合等步骤。
同时,还将讨论在拼接过程中可能出现的问题和相应的解决方法。
本文将通过实验验证基于SIFT特征点的图像拼接方法的有效性。
实验中,将使用不同场景和不同类型的图像进行拼接,分析算法在不同情况下的性能表现。
还将与其他图像拼接算法进行对比,以评估SIFT算法在图像拼接中的优势和局限性。
文章将总结基于SIFT特征点的图像拼接技术的研究成果和实际应用价值,并展望未来的研究方向和发展趋势。
通过本文的研究,旨在为图像拼接技术的发展和应用提供有益的参考和借鉴。
二、SIFT算法原理尺度不变特征变换(Scale-Invariant Feature Transform,SIFT)是一种广泛应用于图像处理和计算机视觉领域的特征检测和描述算法。
SIFT算法的核心思想是在不同的尺度空间上查找关键点,并计算出关键点的方向,生成一种描述子,这个描述子不仅包含了关键点,也包含了其尺度、方向信息,使得特征具有尺度、旋转和亮度的不变性,对于视角变化、仿射变换和噪声也保持一定的稳定性。
SIFT算法主要包括四个步骤:尺度空间极值检测、关键点定位、关键点方向赋值和关键点描述子生成。
特征点检测与特征描述子
特征点检测与特征描述子SIFT特征:SIFT特征(Scale invariant feature transform)是一种局部特征检测的方法。
算法可以搜索出图像中的特征点,并且对特征点计算出一个128维的特征描述子以进行图像特征点匹配。
他具有尺度不变性,旋转不变性等优良性质,并且在一定程度上不受光照的影响。
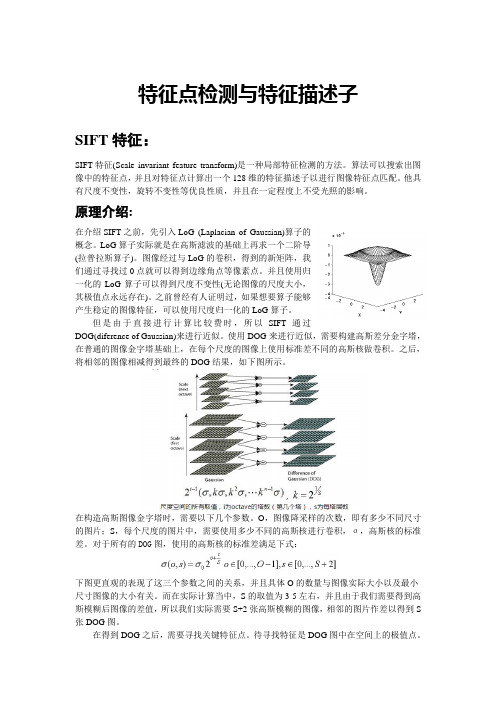
原理介绍:在介绍SIFT之前,先引入LoG (Laplacian of Gaussian)算子的概念。
LoG算子实际就是在高斯滤波的基础上再求一个二阶导(拉普拉斯算子)。
图像经过与LoG的卷积,得到的新矩阵,我们通过寻找过0点就可以得到边缘角点等像素点。
并且使用归一化的LoG算子可以得到尺度不变性(无论图像的尺度大小,其极值点永远存在)。
之前曾经有人证明过,如果想要算子能够产生稳定的图像特征,可以使用尺度归一化的LoG算子。
但是由于直接进行计算比较费时,所以SIFT通过DOG(diference of Gaussian)来进行近似。
使用DOG来进行近似,需要构建高斯差分金字塔,在普通的图像金字塔基础上,在每个尺度的图像上使用标准差不同的高斯核做卷积。
之后,将相邻的图像相减得到最终的DOG结果,如下图所示。
在构造高斯图像金字塔时,需要以下几个参数。
O,图像降采样的次数,即有多少不同尺寸的图片;S,每个尺度的图片中,需要使用多少不同的高斯核进行卷积,σ,高斯核的标准差。
对于所有的DOG图,使用的高斯核的标准差满足下式:下图更直观的表现了这三个参数之间的关系,并且具体O的数量与图像实际大小以及最小尺寸图像的大小有关。
而在实际计算当中,S的取值为3-5左右,并且由于我们需要得到高斯模糊后图像的差值,所以我们实际需要S+2张高斯模糊的图像,相邻的图片作差以得到S 张DOG图。
在得到DOG之后,需要寻找关键特征点。
待寻找特征是DOG图中在空间上的极值点。
这样对于每个像素,在他周围有8个像素点,并且和他同图片大小但是高斯核标准差不同的两个相邻的图片间,他们在空间上也有相邻关系。
SIFT研究资料
Sift是David Lowe于1999年提出的局部特征描述子,并于2004年进行了更深入的发展和完善。
Sift特征匹配算法可以处理两幅图像之间发生平移、旋转、仿射变换情况下的匹配问题,具有很强的匹配能力。
在Mikolajczyk对包括Sift算子在内的十种局部描述子所做的不变性对比实验中,Sift及其扩展算法已被证实在同类描述子中具有最强的健壮性。
总体来说,Sift算子具有以下特性:(1)Sift特征是图像的局部特征,对平移、旋转、尺度缩放、亮度变化、遮挡和噪声等具有良好的不变性,对视觉变化、仿射变换也保持一定程度的稳定性。
(2)独特性好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配。
(3)多量性,即使少数的几个物体也可以产生大量Sift特征向量。
(4)速度相对较快,经优化的Sift匹配算法甚至可以达到实时的要求。
(5)可扩展性强,可以很方便的与其他形式的特征向量进行联合。
Sift特征匹配算法主要包括两个阶段,一个是Sift特征的生成,即从多幅图像中提取对尺度缩放、旋转、亮度变化无关的特征向量;第二阶段是Sift特征向量的匹配。
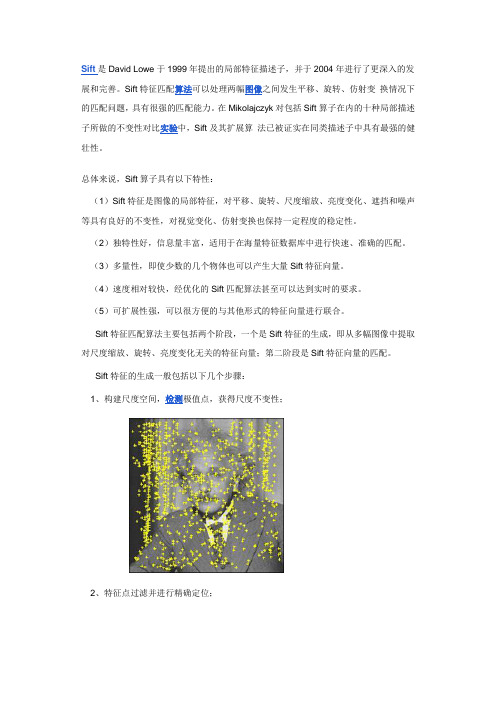
Sift特征的生成一般包括以下几个步骤:1、构建尺度空间,检测极值点,获得尺度不变性;2、特征点过滤并进行精确定位;3、为特征点分配方向值;4、生成特征描述子。
以特征点为中心取16*16的邻域作为采样窗口,将采样点与特征点的相对方向通过高斯加权后归入包含8个bin的方向直方图,最后获得4*4*8的128维特征描述子。
示意图如下:当两幅图像的Sift特征向量生成以后,下一步就可以采用关键点特征向量的欧式距离来作为两幅图像中关键点的相似性判定度量。
取图1的某个关键点,通过遍历找到图像2中的距离最近的两个关键点。
在这两个关键点中,如果次近距离除以最近距离小于某个阙值,则判定为一对匹配点。
一些Sift特征匹配的例子:SIFT算法的教程、源码及应用软件1、ubc:DAVID LOWE---SIFT算法的创始人,两篇巨经典经典的文章http://www.cs.ubc.ca/~lowe/2、cmu:YanKe---PCASIFT,总结的SIFT方面的文章SO全,巨经典/user/yke/3、ubc:MBROWN---SIFT算法用于图像拼接的经典应用autopano-sift,包括一个SIFTLIB 库http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.htmlhttp://www.cs.ubc.ca/~mbrown/panorama/panorama.html4、toronto:Jepson---Matlab SIFT tutorial, 超级超级超级经典~/~jepson5、ucla:Vedaldi---加州大学一个博士生编的SIFT,Matlab、C的都有,但没用过/~vedaldi/6、一个小的拼接软件ptasmblr/ptasmblr.htm。
基于SIFT特征的图像检索技术研究

然而,现有的基于SIFT特征的图像检索方法还存在一些挑战和问题,如特征 选择的不准确性和跨域性问题等。未来的研究可以针对这些问题展开深入探讨, 进一步提高图像检索的准确性和效率。此外,随着深度学习技术的快速发展,研 究者可以尝试将深度学习与基于SIFT特征的图像检索技术相结合,探索更有效的 图像特征表达和匹配方法。
1、图像特征提取
图像特征提取是图像检索的核心,它通过一定的算法从图像中提取出能够代 表图像内容的关键信息,如颜色、纹理、形状等。这些特征可以有效地描述图像 的内容和特征,为后续的图像比较和分析提供基础。常用的特征提取方法包括 SIFT、SURF、ORB等。
2、相似度比较
在提取出图像的特征之后,我们需要对这些特征进行比较,以确定两幅图像 的相似度。常用的相似度比较方法包括欧氏距离、余弦相似度、交叉相关等。这 些方法通过计算特征向量之间的距离或者相关系数,来评估两幅图像的相似程度。
3、检索算法
基于特征的图像检索技术中常用的检索算法包括基于内容的检索、基于神经 网络的检索和基于深度学习的检索等。其中,基于内容的检索通过比较查询图像 和库中图像的特征,找出最相似的图像;基于神经网络的检索通过训练神经网络 来学习图像特征和标签之间的关系,从而对新的图像进行分类和检索;基于深度 学习的检索通过构建深度神经网络模型,对图像进行深度特征提取和分类,从而 实现高精度的图像检索。
SIFT特征最早由David Lowe在1999年提出,具有尺度不变性、旋转不变性、 亮度不变性等优点。自提出以来,SIFT特征在计算机视觉领域得到了广泛应用, 包括目标识别、图像配准、图像检索等。在图像检索领域,SIFT特征可以有效地 表达图像的内容和特征,提高检索准确率。然而,现有的基于SIFT特征的图像检 索方法还存在一些问题,如特征选择不准确、匹配效率低等。
sift特征计算
sift特征计算SIFT(Scale-Invariant Feature Transform)是一种用于计算图像中关键点的特征点描述符的算法。
它最早由David Lowe在1999年提出,被广泛应用于计算机视觉和图像处理领域。
SIFT算法的主要目标是能够提取图像中具有尺度、旋转和光照不变性的关键点。
它通过以下步骤来计算SIFT特征:1. 尺度空间极值检测(Scale-space Extrema Detection):-首先,使用高斯滤波器对原始图像进行多次平滑处理,得到不同尺度空间的图像金字塔。
-然后,在每个尺度空间中,通过比较像素值与其周围像素值来检测图像的极值点。
-这些极值点被认为是图像中可能的关键点。
2. 关键点定位(Key Point Localization):-对于每个检测到的极值点,通过计算尺度空间的高斯差分图像来确定其精确位置。
-使用泰勒级数展开来拟合极值点周围像素的曲线,找到更精确的关键点位置。
-根据曲线的响应值和临近像素点的梯度幅值,筛选掉低对比度和边缘响应的关键点。
3. 方向分配(Orientation Assignment):-对于每个关键点,计算其周围像素点的梯度幅值和方向。
-将周围像素点的梯度方向分布转换为直方图,并找到主导方向。
-在主导方向和周围方向上进行插值,获得关键点的特征方向。
4. 关键点描述(Descriptor Representation):-在关键点周围的邻域内,根据关键点的尺度和方向构建一个相对于尺度和旋转不变的描述子。
-将关键点周围的图像区域划分为若干个子区域,并计算每个子区域内像素的梯度方向和幅值。
-将梯度方向转换为16个方向的直方图,得到长度为128的特征向量。
-对特征向量进行归一化,去除光照变化的影响。
5. 特征匹配(Feature Matching):-使用特征点的描述子来计算两幅图像中的特征点之间的距离。
-对于每个特征点,选择与其特征向量距离最近的特征点作为匹配点。
sift特征匹配步骤
sift特征匹配步骤SIFT/SURF为了实现不同图像中相同场景的匹配,主要包括三个步骤:1. 尺度空间的建⽴;2.特征点的提取;3.利⽤特征点周围邻域的信息⽣成特征描述⼦;4.特征点匹配。
SIFT1.⽣成⾼斯差分⾦字塔(DOG),尺度空间构建 (1)通过对原始图像进⾏尺度变换,获得图像多尺度下的尺度空间表⽰序列 (2)对这些序列进⾏尺度空间主轮廓的提取,并以该主轮廓作为⼀种特征向量,实现边缘、⾓点检测不同分辨率上的关键点提取等 (3)尺度空间构建的基础是DOG⾦字塔,DOG⾦字塔构建的基础是⾼斯⾦字塔2.空间极值点检测(关键点的初步查探) (1)为了寻找DOG函数的极值点,每⼀个像素点要和它所有的相邻点⽐较,看其是否⽐它的图像域和尺度空间域的相邻点⼤或者⼩ (2)在⼆维图像空间,中⼼点与它3×3邻域内⼤的8个点做⽐较,在同⼀组内的尺度空间上,中⼼点和上下相邻的两层图像2×9个点作⽐较,如此可以保证检测到的关键点在尺度空间和⼆维图像空间上都是局部极值点。
3.稳定关键点的精确定位 (1)DOG值对噪声和边缘⽐较敏感,所以在第2步的尺度空间中检测到的局部极值点还要经过进⼀步的筛选,去除不稳定和错误检测出的极值点,另⼀点就是在构建⾼斯⾦字塔过程中采⽤了下采样的图像,在下采样图像中提取的极值点对应在原始图像中的确切位置,也是要在本步骤中解决的问题。
4.稳定关键点⽅向信息分配 (1)稳定的极值点是在不同尺度空间下提取的,这保证了关键点的尺度不变性。
为关键点分配⽅向信息所要解决的问题是使得关键点对图像⾓度和旋转具有不变性,⽅向的分配是通过求每个极值点的梯度来实现的。
(2)分配给关键点的⽅向并不直接是关键点的梯度⽅向,当然梯度⽅向⼀定是在0~360度范围内,对这些梯度⽅向归⼀化到36个⽅向内,每个⽅向代表了10度的范围。
然后累计落到每个⽅向内的关键点个数,以此⽣成梯度⽅向直⽅图。
5.关键点描述 (1)对关键点的描述是后续实现匹配的关键步骤,描述其实就是⼀种以数学⽅式定义关键的过程。
尺度不变特征变换(Scale-invariant feature transform,SIFT

SIFTSIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是用于图像处理领域的一种描述。
这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部特征描述子。
该方法于1999年由David Lowe 首先发表于计算机视觉国际会议(International Conference on Computer Vision,ICCV),2004年再次经David Lowe整理完善后发表于International journal of computer vision(IJCV) 。
截止2014年8月,该论文单篇被引次数达25000余次。
算法介绍SIFT由David Lowe在1999年提出,在2004年加以完善。
SIFT在数字图像的特征描述方面当之无愧可称之为最红最火的一种,许多人对SIFT进行了改进,诞生了SIFT的一系列变种。
SIFT 已经申请了专利。
SIFT特征是基于物体上的一些局部外观的兴趣点而与影像的大小和旋转无关。
对于光线、噪声、微视角改变的容忍度也相当高。
基于这些特性,它们是高度显著而且相对容易撷取,在母数庞大的特征数据库中,很容易辨识物体而且鲜有误认。
使用SIFT特征描述对于部分物体遮蔽的侦测率也相当高,甚至只需要3个以上的SIFT物体特征就足以计算出位置与方位。
在现今的电脑硬件速度下和小型的特征数据库条件下,辨识速度可接近即时运算。
SIFT特征的信息量大,适合在海量数据库中快速准确匹配。
算法的特点SIFT算法具有如下一些特点:1.SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性;2. 区分性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配;3. 多量性,即使少数的几个物体也可以产生大量的SIFT特征向量;4.高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;5.可扩展性,可以很方便的与其他形式的特征向量进行联合。
SIFT特征关键点检测算法-论文
目录 i目录第一章绪论.................................................................................. 错误!未定义书签。
第二章相关研究. (3)2.1基本概念 (3)2.1.1 采样 (3)2.1.2 卷积 (3)2.1.3 图像金字塔 (4)2.1.4 尺度、梯度 (5)2.2 点特征提取 (5)2.3 几种物体识别算法的比较 (6)2.4 SIFT的应用 (8)2.5 SIFT算法优点 (9)2.6 SIFT的一些缺点 (10)第三章关键点提取 (11)3.1SIFT特性 (11)3.2SIFT算法步骤 (11)3.3 尺度空间的建立 (12)3.3.1高斯空间 (12)3.3.2 DOG空间的建立 (13)3.4 本地极值点获取 (15)3.5 尺度空间采样频率 (16)3.6空间域采样频率 (18)3.7 精确确定极值点 (18)3.7.1 三维二次拟合 (19)3.7.2 去除不稳定边缘响应点 (20)3.8 PCA-SIFT (21)第四章局部图像描述子 (23)Ii 目录4.1 关键点方向分配 (23)4.2特征点描述子生成 (24)第五章实验以及实验结果分析 (29)5.1 基本实验 (29)5.2 精确确定极值点实验 (30)5.3 尺度参数 概念实验 (33)5.4 最大特征值最小特征值比值r对关键点获取的影响 (34)5.5低对比度点的去除实验 (38)第六章全文总结 (43)致谢 (45)参考书目 (47)第一章绪论1第一章绪论在计算机可视化应用中,图像匹配是解决许多问题之前必须解决的基础问题,包括物体的场景识别,解决复合图像3D结构问题等。
图像中有许多很有特性的关键点,这些关键点对于尺度变换和旋转,亮度以及3D视图变换等表现出了不变的特性。
而且对视角变化,仿射变化,噪声变化也保持一定的稳定性。
SIFT特征提取及其在人脸识别中的应用

为每个关键点分配一个或多个方 向,以增强对图像旋转的鲁棒性。
4. 生成特征描述符
在关键点周围选取一定范围的邻 域,计算梯度方向直方图,生成 特征描述符。
1. 尺度空间极值检测
5. 特征匹配
在多个尺度空间上检测关键点位 置和尺度。
使用特征描述符进行相似度匹配, 找到图像之间的相似特征点。
02 人脸识别技术概述
通过改进特征描述符的设计,使其能够更好地适应尺度缩放和旋转变化,提高特征提取的 准确性。
提高对光照变化和遮挡问题的处理能力
通过引入更多的图像特征信息,或者采用其他算法来处理光照变化和遮挡问题,以增强 SIFT算法的性能。
降低计算复杂度
通过优化算法实现更高效的计算,例如采用并行计算、优化数据结构等方法,提高算法的 实时性和效率。
ORB算法是一种结合了SIFT和FAST特征检测器的算法, 通过使用旋转不变性、边缘信息和尺度空间来提高特征提 取的准确性和鲁棒性。
05 未来展望
SIFT算法的发展趋势
01
02
03
实时性提升
随着计算能力的增强, SIFT算法将进一步优化, 实现更快速的特征提取, 满足实时处理的需求。
多模态融合
结合深度学习技术,SIFT 算法将进一步发展多模态 特征融合,提升对复杂场 景的适应性。
sift特征提取及其在人脸识别中的 应用
目录
• SIFT特征提取算法简介 • 人脸识别技术概述 • SIFT在人脸识别中的应用 • SIFT算法的改进和优化 • 未来展望
01 SIFT特征提取算法简介
SIFT算法的起源和原理
01
02
03
SIFT(Scale-Invariant Feature Transform)算 法由David Lowe于1999 年提出,旨在解决图像尺 度、旋转和光照变化下的
特征点检测算法
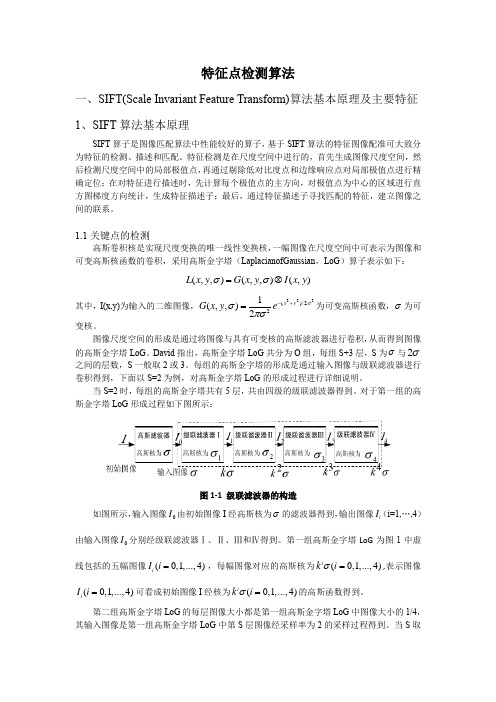
特征点检测算法一、SIFT(Scale Invariant Feature Transform)算法基本原理及主要特征1、SIFT 算法基本原理SIFT 算子是图像匹配算法中性能较好的算子,基于SIFT 算法的特征图像配准可大致分为特征的检测、描述和匹配。
特征检测是在尺度空间中进行的,首先生成图像尺度空间,然后检测尺度空间中的局部极值点,再通过剔除低对比度点和边缘响应点对局部极值点进行精确定位;在对特征进行描述时,先计算每个极值点的主方向,对极值点为中心的区域进行直方图梯度方向统计,生成特征描述子;最后,通过特征描述子寻找匹配的特征,建立图像之间的联系。
1.1关键点的检测高斯卷积核是实现尺度变换的唯一线性变换核,一幅图像在尺度空间中可表示为图像和可变高斯核函数的卷积,采用高斯金字塔(LaplacianofGaussian ,LoG )算子表示如下:(,,)(,,)(,)L x y G x y I x y σσ=⊗其中,I(x,y)为输入的二维图像,222()/221(,,)2x y G x y e σσπσ-+=为可变高斯核函数,σ为可变核。
图像尺度空间的形成是通过将图像与具有可变核的高斯滤波器进行卷积,从而得到图像的高斯金字塔LoG 。
David 指出,高斯金字塔LoG 共分为O 组,每组S+3层,S 为σ与2σ之间的层数,S 一般取2或3。
每组的高斯金字塔的形成是通过输入图像与级联滤波器进行卷积得到,下面以S=2为例,对高斯金字塔LoG 的形成过程进行详细说明。
当S=2时,每组的高斯金字塔共有5层,共由四级的级联滤波器得到。
对于第一组的高斯金字塔LoG 形成过程如下图所示:图1-1 级联滤波器的构造如图所示,输入图像0I 由初始图像I 经高斯核为σ的滤波器得到,输出图像i I (i=1,…,4)由输入图像0I 分别经级联滤波器Ⅰ、Ⅱ、Ⅲ和Ⅳ得到。
第一组高斯金字塔LoG 为图1中虚线包括的五幅图像(0,1,...,4)i I i =,每幅图像对应的高斯核为(0,1,...,4)ik i σ=,表示图像(0,1,...,4)i I i =可看成初始图像I 经核为(0,1,...,4)i k i σ=的高斯函数得到。
SIFT特征分析
所有取值小于0.04的极 值点பைடு நூலகம்可抛弃。
DX
D
D T X
X
1 2
XT
2D X 2
X
(1)
X
D T
X
(
2D X 2
)
1
(2)
D
X
D
1 2
D X
T
X
(3)
| D( X ) | (4)
2.SIFT原理
去除不稳定的边缘响应点:
获取极值点处的Hessian矩阵,主曲率 通过一个 2*2的Hessian矩阵H求出。
(x, y) tan1((L(x, y 1) L(x, y 1) (L(x 1, y) L(x 1, y))
2.SIFT原理
确定关键点的主方向 1.直方图以每10度方向为一个柱,共36个柱,柱所代表 的方向为像素点梯度方向,柱的长短代表了梯度幅值。 2.根据Lowe的建议,直方图统计半径采用3*1.5*σ。 3.在直方图统计时,每相邻三个像素点采用高斯加权, 根据Lowe的建议,模板采用[0.25,0.5,0.25],并连续加权 两次。
2.SIFT原理
SIFT算法的实质可以归为 在不同尺度空间上查找 特征点(关键点)的问 题。
关键点,就是在不同尺 度空间的图像下检测出的 具有方向信息的局部极值 点。
尺度空间理论是通过对原 始图像进行尺度变换,获 得图像多尺度下的尺度空 间表示序列,对这些序列 进行尺度空间主轮廓的提 取,并以该主轮廓作为一 种特征向量,实现边缘、 角点检测和不同分辨率上 的特征提取等。
Det (H )
2.SIFT原理
确定关键点的主方向
通过尺度不变性求极值点,可以使其具有缩放不变的性 质,利用关键点邻域像素的梯度方向分布特性,可以为 每个关键点指定方向,使描述子对图像旋转具有不变性。 像素点(x, y) 处的梯度表示:
基于SIFT特征点的图像拼接技术研究

基于SIFT特征点的图像拼接技术研究基于SIFT特征点的图像拼接技术研究图像拼接是指将多张局部图像无缝拼接成一幅全景图像的过程。
在计算机视觉和图像处理领域,图像拼接是一项挑战性的任务,需要解决视角变化、光照不一致、尺度变化等问题。
为了解决这些问题,研究者提出了基于尺度不变特征变换(Scale-Invariant Feature Transform,SIFT)的图像拼接技术。
SIFT特征点是一种基于局部特征的图像描述方法,具有尺度不变性和旋转不变性。
它通过检测图像中的关键点,然后提取关键点周围的局部特征向量。
SIFT特征点具有以下几个特点:(1)尺度不变性:SIFT特征点可以在不同尺度下检测和匹配;(2)旋转不变性:SIFT特征点对图像的旋转具有鲁棒性;(3)局部特征描述:SIFT特征点通过提取关键点周围的局部特征向量来描述图像。
在图像拼接中,SIFT特征点的检测和匹配是关键环节。
首先,通过尺度空间极值检测来检测出图像中的SIFT特征点。
尺度空间极值检测是在不同尺度下寻找像素点的局部最大或最小值,从而确定图像中的关键点。
这一步骤可以通过高斯金字塔来实现,高斯金字塔是在不同尺度下对图像进行平滑处理,然后通过差分金字塔来检测图像的极值点。
接下来,对于每个关键点,通过SIFT算法计算其局部特征向量。
SIFT算法分为关键点的定位和方向分配两个步骤。
关键点定位使用关键点的尺度空间极值来确定关键点的准确位置。
方向分配则是为关键点分配一个主方向,用于后续的特征描述。
在方向分配过程中,SIFT算法使用梯度直方图来描述关键点周围的梯度信息,并选择梯度直方图中的峰值作为关键点的主方向。
经过关键点的检测和特征向量的计算后,接下来需要进行关键点的匹配。
关键点的匹配是指找到在两幅图像中具有相似特征的关键点对。
在进行关键点的匹配时,通常使用最近邻匹配和次近邻匹配的方式进行。
最近邻匹配是指对于每个关键点,在另一幅图像中找到距离最近的关键点作为匹配点;次近邻匹配则用于判断最近邻匹配的可靠性,通过计算最近邻和次近邻之间的距离比值来筛选匹配点。
python利用opencv实现SIFT特征提取与匹配
python利⽤opencv实现SIFT特征提取与匹配本⽂实例为⼤家分享了利⽤opencv实现SIFT特征提取与匹配的具体代码,供⼤家参考,具体内容如下1、SIFT1.1、sift的定义SIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是⽤于图像处理领域的⼀种描述。
这种描述具有尺度不变性,可在图像中检测出关键点,是⼀种局部特征描述⼦。
1.2、sift算法介绍SIFT由David Lowe在1999年提出,在2004年加以完善。
SIFT在数字图像的特征描述⽅⾯当之⽆愧可称之为最红最⽕的⼀种,许多⼈对SIFT进⾏了改进,诞⽣了SIFT的⼀系列变种。
SIFT已经申请了专利(所以现在opencv使⽤这个算法,需要低的版本)。
SIFT特征是基于物体上的⼀些局部外观的兴趣点⽽与影像的⼤⼩和旋转⽆关。
对于光线、噪声、微视⾓改变的容忍度也相当⾼。
基于这些特性,它们是⾼度显著⽽且相对容易撷取,在母数庞⼤的特征数据库中,很容易辨识物体⽽且鲜有误认。
使⽤SIFT特征描述对于部分物体遮蔽的侦测率也相当⾼,甚⾄只需要3个以上的SIFT物体特征就⾜以计算出位置与⽅位。
在现今的电脑硬件速度下和⼩型的特征数据库条件下,辨识速度可接近即时运算。
SIFT特征的信息量⼤,适合在海量数据库中快速准确匹配。
SIFT算法具有如下⼀些特点:1)SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视⾓变化、仿射变换、噪声也保持⼀定程度的稳定性;2)区分性(Distinctiveness)好,信息量丰富,适⽤于在海量特征数据库中进⾏快速、准确的匹配;3)多量性,即使少数的⼏个物体也可以产⽣⼤量的SIFT特征向量;4)⾼速性,经优化的SIFT匹配算法甚⾄可以达到实时的要求;5)可扩展性,可以很⽅便的与其他形式的特征向量进⾏联合。
1.3、特征检测SIFT特征检测主要包括以下4个基本步骤:1)尺度空间极值检测:搜索所有尺度上的图像位置。
特征点识别方法

特征点识别方法是一个广泛应用的计算机视觉任务,它涉及到从图像中提取和识别关键点。
以下是一些常用的特征点识别方法:
1. SIFT(尺度不变特征变换):SIFT是一种广泛使用的特征点识别算法,它通过在不同尺度空间上检测关键点,并利用图像的尺度、方向和相位信息来描述这些关键点的特征。
SIFT算法具有对尺度和旋转的鲁棒性,能够在不同的光照条件和视角下进行有效的特征匹配。
2. SURF(加速鲁棒特征):SURF是一种改进的SIFT算法,通过使用Hessian矩阵和盒子滤波器来加速关键点的检测和描述。
SURF算法比SIFT算法更快,但可能在复杂图像或噪声环境下表现稍逊。
3. ORB(Oriented FAST and Rotated BRIEF):ORB算法是一种结合了FAST角点和BRIEF描述符的特征点识别方法。
它通过考虑角点的方向和旋转不变性,提供了一种稳健的特征描述方式。
ORB算法的计算效率较高,适用于实时应用。
4. 角点检测:角点是图像中边缘交点的位置,可以通过检测图像中的边缘然后寻找交点来识别角点。
角点检测算法可以提供图像中的角点位置信息,但通常需要与其他特征描述符结合使用才能进行有效的特征匹配。
5. 特征池:特征池是一种结合多种特征提取方法的特征点识别策略。
它将多种特征提取算法应用于同一图像,并将它们的结果组合在一起形成特征池。
这种方法可以提高特征匹配的鲁棒性和准确性,但计算成本较高。
这些方法各有优缺点,在实际应用中需要根据具体情况选择适合的方法。
同时,特征点识别方法通常与其他计算机视觉任务(如目标检测、跟踪和识别)结合使用,以提高整体性能。
sift特征通俗解释

SIFT特征通俗解释
SIFT(Scale-Invariant Feature Transform)特征是一种用于图像匹配和计算机视觉中的特征描述子。
通俗地说,SIFT 特征可以理解为图像中的一些关键点和这些关键点周围的局部特征描述。
具体来说,SIFT特征包括以下几个步骤:
1. 尺度空间极值检测:在不同尺度下检测图像中的极值点,这些极值点通常对应于图像中的角点、边缘等局部特征。
2. 关键点定位:对于每个尺度下检测到的极值点,通过高斯差分算子进行定位,得到其在不同尺度下的位置和尺度。
3. 方向分配:对于每个关键点,计算其周围像素点的梯度直方图,并根据梯度直方图的方向分布,将该点分配到不同的方向空间中。
4. 特征描述子生成:对于每个关键点,在其周围的一定区域内提取局部特征描述子,包括梯度、方向直方图等信息。
SIFT特征具有以下特点:
1. 尺度不变性:SIFT特征不受图像尺度变化的影响,可以在不同尺度下对同一物体进行匹配。
2. 旋转不变性:SIFT特征对物体的旋转也具有不变性,可以在不同角度下对同一物体进行匹配。
3. 鲁棒性:SIFT特征对图像的噪声和变形具有一定的
鲁棒性,可以在一定程度上减少匹配时的误差。
SIFT特征在计算机视觉中被广泛应用于图像匹配、目标跟踪、三维重建等领域。
基于SIFT算法的图像特征抽取算法详解

基于SIFT算法的图像特征抽取算法详解图像特征抽取是计算机视觉领域中的一个重要任务,它能够帮助计算机理解和处理图像。
在众多的图像特征抽取算法中,SIFT(Scale-Invariant Feature Transform)算法因其在尺度不变性和旋转不变性方面的优秀表现而备受关注。
本文将详细介绍基于SIFT算法的图像特征抽取算法。
一、SIFT算法的原理SIFT算法的核心思想是在图像中寻找具有尺度和旋转不变性的关键点。
它通过以下步骤实现特征抽取:1. 尺度空间极值检测:SIFT算法首先通过高斯金字塔构建图像的尺度空间,然后在每个尺度上寻找图像中的极值点。
这些极值点通常对应于图像中的角点、边缘和斑点等显著特征。
2. 关键点定位:在尺度空间极值点的基础上,SIFT算法通过对尺度空间进行高斯差分操作,进一步精确定位关键点的位置。
这样可以减少对于尺度和旋转的敏感度,提高算法的稳定性。
3. 方向分配:为了实现旋转不变性,SIFT算法对每个关键点计算其主方向。
它通过计算关键点周围像素的梯度方向直方图,找到梯度方向直方图中的峰值作为关键点的主方向。
4. 特征描述:最后,SIFT算法对每个关键点周围的局部图像区域进行特征描述。
它将关键点周围的像素划分为若干个子区域,并计算每个子区域内像素的梯度直方图。
这样可以得到一个具有128维的特征向量,用于表示关键点的特征。
二、SIFT算法的优势SIFT算法在图像特征抽取方面具有以下优势:1. 尺度不变性:SIFT算法通过尺度空间极值检测和关键点定位,可以在不同尺度下寻找到相同的关键点。
这使得SIFT算法在处理具有不同尺度的图像时具有较好的性能。
2. 旋转不变性:SIFT算法通过方向分配,可以在不同旋转角度下找到相同的关键点。
这使得SIFT算法在处理具有旋转变换的图像时具有较好的鲁棒性。
3. 高维特征描述:SIFT算法通过局部图像区域的特征描述,可以提取到丰富的特征信息。
这使得SIFT算法在图像匹配和目标识别等任务中具有较好的性能。
SIFT特征点提取与匹配算法
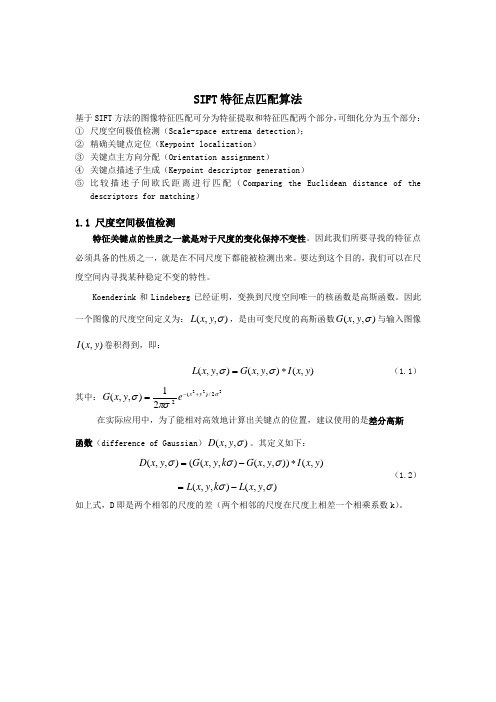
SIFT 特征点匹配算法基于SIFT 方法的图像特征匹配可分为特征提取和特征匹配两个部分,可细化分为五个部分: ① 尺度空间极值检测(Scale-space extrema detection );② 精确关键点定位(Keypoint localization )③ 关键点主方向分配(Orientation assignment )④ 关键点描述子生成(Keypoint descriptor generation )⑤ 比较描述子间欧氏距离进行匹配(Comparing the Euclidean distance of the descriptors for matching )1.1 尺度空间极值检测特征关键点的性质之一就是对于尺度的变化保持不变性。
因此我们所要寻找的特征点必须具备的性质之一,就是在不同尺度下都能被检测出来。
要达到这个目的,我们可以在尺度空间内寻找某种稳定不变的特性。
Koenderink 和Lindeberg 已经证明,变换到尺度空间唯一的核函数是高斯函数。
因此一个图像的尺度空间定义为:(,,)L x y σ,是由可变尺度的高斯函数(,,)G x y σ与输入图像(,)I x y 卷积得到,即:),(),,(),,(y x I y x G y x L *=σσ (1.1) 其中:2222/)(221),,(σπσσy x e y x G +-=在实际应用中,为了能相对高效地计算出关键点的位置,建议使用的是差分高斯函数(difference of Gaussian )(,,)D x y σ。
其定义如下:),,(),,(),()),,(),,((),,(σσσσσy x L k y x L y x I y x G k y x G y x D -=*-= (1.2)如上式,D 即是两个相邻的尺度的差(两个相邻的尺度在尺度上相差一个相乘系数k )。
图 1.1图1.1所展示的是建立DOG 的一种实用的方法。
SIFT特征提取算法总结

SIFT特征提取算法总结SIFT(Scale-Invariant Feature Transform)特征提取算法是一种旋转不变性和尺度不变性较强的特征提取算法,被广泛应用于计算机视觉领域中的图像配准、目标识别、三维重建等任务中。
SIFT算法由David Lowe在1999年提出,并在2004年发表了他的论文,成为一种经典的特征提取算法。
本篇文章将对SIFT特征提取算法进行总结和分析。
1.SIFT特征提取算法原理(1)尺度空间极值检测:在不同的尺度空间中寻找关键点。
SIFT算法使用高斯金字塔对图像进行尺度空间的离散采样。
在每个尺度空间中,通过构建DoG(Difference of Gaussian)金字塔来检测图像中的局部极值点。
(2)关键点定位:对尺度空间极值点进行精确定位以得到关键点。
在尺度空间中使用Hessian矩阵来估计关键点的位置和尺度,并通过亚像素插值来获得更加精确的关键点位置。
(3)方向分配:为每个关键点分配主方向。
SIFT算法在关键点周围的邻域内计算梯度方向直方图,选择梯度方向最大的方向作为该关键点的主方向。
(4)描述子生成:对关键点周围的邻域进行描述子的生成。
SIFT算法将关键点周围的邻域划分为一个个小区域,并计算每个小区域内的梯度方向直方图,从而生成描述子。
2.SIFT特征提取算法优点(1)尺度不变性:SIFT算法在不同尺度空间中检测图像的关键点,使得检测到的关键点能够具有尺度不变性。
(2)旋转不变性:SIFT算法对每个关键点分配主方向,通过旋转关键点周围的邻域来实现旋转不变性。
(3)良好的特征描述性:SIFT特征由128维向量表示,能够克服一些小范围内的图像变换,如亮度变化等。
(4)鲁棒性:SIFT算法对噪声、模糊等干扰具有较强的鲁棒性,适用于复杂的图像条件下提取特征。
3.SIFT特征提取算法应用SIFT特征提取算法广泛应用于计算机视觉领域中的图像配准、目标识别、三维重建等任务中。
SIFT特征提取算法详解
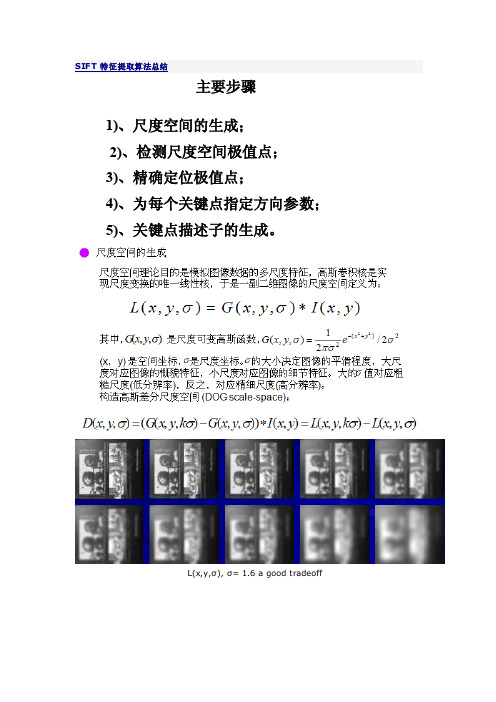
SIFT 特征提取算法总结主要步骤1)、尺度空间的生成;2)、检测尺度空间极值点;3)、精确定位极值点;4)、为每个关键点指定方向参数;5)、关键点描述子的生成。
L(x,y,σ), σ= 1.6 a good tradeoffD(x,y,σ), σ= 1.6 a good tradeoff关于尺度空间的理解说明:图中的2是必须的,尺度空间是连续的。
在 Lowe 的论文中,将第0层的初始尺度定为1.6,图片的初始尺度定为0.5. 在检测极值点前对原始图像的高斯平滑以致图像丢失高频信息,所以Lowe 建议在建立尺度空间前首先对原始图像长宽扩展一倍,以保留原始图像信息,增加特征点数量。
尺度越大图像越模糊。
next octave 是由 first octave 降采样得到(如2),尺度空间的所有取值,s为每组层数,一般为3~5在DOG尺度空间下的极值点同一组中的相邻尺度(由于k的取值关系,肯定是上下层)之间进行寻找在极值比较的过程中,每一组图像的首末两层是无法进行极值比较的,为了满足尺度变化的连续性,我们在每一组图像的顶层继续用高斯模糊生成了 3 幅图像,高斯金字塔有每组S+3层图像。
DOG金字塔每组有S+2层图像.If ratio > (r+1)2/(r), throw it out (SIFT uses r=10)表示DOG金字塔中某一尺度的图像x方向求导两次通过拟和三维二次函数以精确确定关键点的位置和尺度(达到亚像素精度)?直方图中的峰值就是主方向,其他的达到最大值80%的方向可作为辅助方向Identify peak and assign orientation and sum of magnitude to key point The user may choose a threshold to exclude key points based on theirassigned sum of magnitudes.利用关键点邻域像素的梯度方向分布特性为每个关键点指定方向参数,使算子具备旋转不变性。
sift,lbp特征与PCA降维 k-means

sift:尺度不变特征转换,是一种局部特征描述子
寻找极值点,并提取出其尺度,位置,旋转不变量
lbp:局部二值模式,用于描述局部纹理特征的算子
pca:主成分分析法,实质就是在尽可能代表原特征的情况下,将原特征进行线性变换,映射至低位空间中
k-means : 是一种聚类算法
算法过程如下:
1)从N个文档随机选取K个文档作为质心
2)对剩余的每个文档测量其到每个质心的距离,并把它归到最近的质心的类
3)重新计算已经得到的各个类的质心
4)迭代2~3步直至新的质心与原质心相等或小于指定阈值,算法结束。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
weight w * drk * (1 dr)1k * dcm * (1 dc)1m * don * (1 do)1n
m,n,k取0或1。
dr 1-dc 1-dr dc
3.SIFT研究现状
优点 缺点 1)SIFT特征是图像的局部特征, 1)实时性不高; 其对旋转、尺度缩放、亮度变 2)有时特征点较少; 化保持不变性,对视角变化、 3)对边缘光滑的目标无法准 仿射变换、噪声也保持一定 确提取特征点。 程度的稳定性; 2)独特性好,信息量丰富,适用 于海量特征数据库中进行快速、 准确的匹配; 3)多量性,即使少数的几个物体 也可以产生大量的SIFT特征向 量; 4)高速性,经优化的SIFT匹配算 法可以达到实时的要求; 5)可扩展性,可以很方便的与其 他形式的特征向量进行联合。
?
3.SIFT研究现状
PCA-SIFT PCA是一种数据降维技 术。通过降维技术,可有 效化简SIFT算子的128维 描述子。 SURF SURF是SIFT算法的增强 版,SURF算法的计算量 小,运算速度快,提取 的特征点几乎与SIFT相 同。
CSIFT 彩色尺度特征不变变换, 可以针对彩色图像进行图 像的不变特征提取。
通过尺度不变性求极值点,可以使其具有缩放不变的性 质,利用关键点邻域像素的梯度方向分布特性,可以为 每个关键点指定方向,使描述子对图像旋转具有不变性。 像素点( x, y ) 处的梯度表示:
m( x, y ) ( L( x 1, y ) L( x 1, y ))2 ( L( x, y 1) L( x, y 1))2
4.SIFT在图像中的应用
实验结果表明,文中算法 对结构内容图像的匹配性 能与SIFT算法相当, 运 算速度比SIFT算法大为 提高。
4.SIFT在图像中的应用
4.2图像配准 刘向增等人提出了一种基于仿射不变稳健 SIFT 特征的 SAR 图像配准方法(RSIFT+SVD)。在以 Hessian 矩阵特征值为参数椭圆邻域内构造特征 点的 SIFT特征具有仿射不变性,并在构造过程 中采用 Premitt算子计算像素点的梯度和方向, 利用了更多的邻域信息减小了算法的对灰度变 化的敏感性。考虑了点邻域的灰度相关性和点 对的尺度比和方位差误差,定义了新的相似性 度量,提高了算法对大几何变化及灰度变化的 稳健性。
2.SIFT原理
确定关键点的主方向 关键点主方向:极值点周 围区域梯度直方图的主峰 值也是特征点方向 关键点辅方向:在梯度方 向直方图中,当存在另一 个相当于主峰值80%能量 的峰值时,则将这个方向 认为是该关键点的辅方向。
2.SIFT原理
生成SIFT特征矢量
描述子由2×2×8维向量表征,即2×2个8方向的方向直方图组成。 左图的种子点由8×8单元组成。每一个小格都代表了特征点邻域所 在的尺度空间的一个像素,箭头方向代表了像素梯度方向,箭头长 度代表该像素的幅值。在4×4的窗口内计算8个方向的梯度方向直 方图。绘制每个梯度方向的累加可形成一个种子点,如右图所示: 一个特征点由4个种子点的信息所组成。
2.SIFT原理
尺度空间的极值点检测
建立高斯金字塔 建立DOG金字塔 DOG空间极值点检测 关键点的精确定位
确定关键点的主方向
生成SIFT特征矢量(生成关键点的描述算子)
2.SIFT原理
尺度空间的极值点检测
一个图像的尺度空间 L( x, y, ) 定义为原始图像 I ( x, y ) 与一个可变尺度的2维高斯函数 G( x, y,卷) 积运算。
( x, y ) tan1 (( L( x, y 1) L( x, y 1) ( L( x 1, y) L( x 1, y))
2.SIFT原理
确定关键点的主方向 1.直方图以每10度方向为一个柱,共36个柱,柱所代表 的方向为像素点梯度方向,柱的长短代表了梯度幅值。 2.根据Lowe的建议,直方图统计半径采用3*1.5*σ。 3.在直方图统计时,每相邻三个像素点采用高斯加权, 根据Lowe的建议,模板采用[0.25,0.5,0.25],并连续加权 两次。
2.SIFT原理
降采样 上一组图像的底层是由 前一组图像的最后一层 图像隔点采样生成的。
2.SIFT原理
建立DOG金字塔
在尺度空间中有效检测关 键点的位置,对图像使用 可变的高斯差分函数 D( x, y, ) 求尺度空间中的极值。
D( x, y, ) L( x, y, k ) L( x, y, )
描述符生成
20*20(单位为pixel)区域 划分为4*4(或2*2)的子区 域,每个子域计算8bin 直方图
20*20(单位为sigma)区域划分为 4*4子域,每个子域计算5*5个采 样点的Haar小波响 应,记录 ∑dx, ∑dy, ∑|dx|,∑|dy|。
3.SIFT研究现状
SIFT、PCA-SIFT
Octave 5 Octave 4 Octave 3
…
…
8
…
4
2
…
Octave 2
…
Octave 1
2.SIFT原理
建立高斯金字塔
高斯金字塔共O组, 每组S层,则有:
组内相邻两层的尺度 1 s 1 s S 2 组间相邻两层的尺度
o 1 ( s) o 2
L( x, y, ) G( x, y, )* I ( x, y)
G( x, y, ) 1 2
2 ( x2 y 2 )
e
2 2
2.SIFT原理
建立高斯金字塔
高斯金子塔的构建过程可 分为两步: 1)对图像做高斯平滑; 2)对图像做降采样。 根据不同的尺度,一幅图 像可以产生几组(octave) 图像,一组图像包括几层 (interval)图像。
关键点周围区域图像梯度
关键点描述子
2.SIFT原理
x
x
y
y
Lowe实验结果表明: 描述子采用4×4×8 =128维向量表征, 综合效果最优(不变 性与独特性)。
3 oct 3 oct 3 oct 3 oct
x
y
2.SIFT原理
生成SIFT特征矢量 步骤如下: 1.确定计算描述子所需的图像区域; 2.将坐标轴旋转为关键点的方向,以确保旋转不变性; 3.将邻域内的采样点分配到对应的子区域内,子区域内 的梯度值分配到8个方向上,计算其权值; 4.插值计算每个种子点八个方向的梯度; 5.如上统计的梯度信息即为该关键点的特征向量; 6.描述子向量门限; 7.按特征点的尺度对特征描述向量进行排序。
每组检测S个极值点, DOG金字塔每组需要S+2 层,高斯金字塔每组需要 S+3层。
2.SIFT原理
DOG检测局部极值点
关键点是由DOG空间的局部极值 点组成的。为了寻找DoG函数的 极值点,每一个像素点要和它所 有的相邻点比较,看其是否是所 有相邻点中的最大值或最小值, 若是就认为它是一个极值点。 中间的检测点和它同尺度的8个相 邻点和上下相邻尺度对应的9×2 个点共26个点比较,以确保在尺 度空间和二维图像空间都检测到 极值点。
3.SIFT研究现状
改进 SIFT在图像的不变特征提取方面拥有优势,但 存在着实时性不高、有时特征点较少、对边缘 模糊的目标无法准确提取特征点等缺陷。
SIFT家族
SIFT Lowe,1999
PCA-SIFT Y.ke, 2004
CSIFT Farag.2006
SURF Bay,2006
ASIFT J.M. Morel 2009
T
对尺度空间DoG函数进 行曲线拟合其Taylor展 开式(1); (1)式求导得(2); 计算(4); 所有取值小于0.04的极 值点均可抛弃。
D 2 D 1 X ( 2 ) (2) X X T 1 D D X D X (3) 2 X
T
| D( X ) | (4)
2.SIFT原理
关键点的精确定位
上面检测到的极值点是离散的空间极值点, 通过三维二次函数精确确定关键点的位置和尺 度,同时去除低对比度的极值点和不稳定的边 缘响应点(DOG算子会产生较强的边缘响应), 以增强匹配稳定性、提高抗噪声能力。
2.SIFT原理
去除低对比度的点
D 1 T 2 D D X D X X X (1) X 2 X 2
2.SIFT原理
旋转后区域内采样点的新坐标为:
ˆ x cos ˆ y sin sin x cos y
x
x
y
y
2.SIFT原理
在区域内对每个像素点求其梯度幅值和方向,然后对每 个梯度幅值乘以高斯权重参数,生成方向直方图。
ASIFT 两个向量空间之间的一个 仿射变换。ASIFT可以抵 抗强仿射情况,提取的 特征点远多于SIFT算法。
3.SIFT研究现状
SIFT
特征点检测 用不同尺度的高斯函数 与图像做卷积
ቤተ መጻሕፍቲ ባይዱ
SURF
用不同大小的box filter与原始图 像做卷积,易于并行
方向
特征点邻域内,利用梯 度直方图计算
特征点邻接圆域内,计算x、y方 向上的Haar小波响应
SIFT特征
主要内容
SIFT简介 SIFT原理 SIFT研究现状 SIFT图像中的应用 参考文献
1.SIFT简介
1999年David G.Lowe教授提出了一种基于 尺度空间的、对图像缩放、旋转甚至仿射 变换保持不变性的图像局部特征描述算子 -尺度不变特征变换(Scale Invariant Feature Transform,SIFT ),2004年得到 完善。