spyglass中文使用说明
变形金刚人物名称中英文对照

变形⾦刚⼈物名称中英⽂对照变形⾦刚⼈物名称中英⽂对照Optimus Prime 擎天柱Blaster 录⾳机Perceptor 感知器Ironhide 铁⽪Hound 探长Jazz 爵⼠Prowl 警车Ratchet 救护车Wheeljack 千⽄顶Bluestreak 兰霹雳Mirage 幻影Sideswipe 横炮Trailbreaker 开路先锋Sunstreaker 飞⽑腿Grapple 吊车Hoist 滑车Inferno 消防车Red Alert 红⾊警报Smokescreen 烟幕Tracks 轮胎Skids 刹车Bumblebee ⼤黄蜂Cliffjumper 飞过⼭Gears 变速箱Brawn ⼤汉Beachcomber 巨浪Cosmos 宇宙飞碟Huffer 鲁莽Powerglide 滑翔机Seaspray 浪花Warpath 战戟Windcharger 充电器Skyfire 天⽕Omega Supreme ⼤⼒⾦刚Grimlock 钢锁Sludge 淤泥Slag 铁渣Swoop 飞标Snarl 嚎叫Superion ⼤⽆畏Silverbolt 银剑Slingshot 弹⼸Skydive 俯冲Airraid 空袭Fireflight 飞⽕Defensor 守护神Hot Spot 热点First Aid 急救员Streetwise ⼤街Blades ⼑刃Groove 车辙Elita One 艾丽塔Chromia 克劳莉娅Moonracer ⽉娇Firestar ⽕翼星Alpha Trion 钛师傅Defcon 敌⽆双*S3Rodimus Prime 补天⼠Ultra Magnus 通天晓Kup 杯⼦Blurr 罗嗦Arcee 阿尔茜Blaster 录⾳机Steeljaw 钢钳Ramhorn 犀⽜Rewind 发条Eject 喷射Springer 弹簧Sandstorm 沙漠风暴Broadside 排炮Sky Lynx 天猫Metroplex 猛⼤帅Wreck-Gar 营救车Pipes 管⼦Tailgate 挡板Outback 腹地Hubcap 的⼠Wheelie 转轮Hubcap ⾦飞⾍Computron 计算王Scattershot 机关炮Lightspeed 光速Nosecone 钻探机Afterburner 烙铁*S4Fortress Maximus 福特Chromedome 郭⽂Hardhead 费特Highbrow 海隆Brainstorm ⾥恩Pointblank 布兰卡Crosshairs 克罗斯Sureshot 沙特Punch-Counterpunch 双⾯⼈Fastlane 浪⼦Cloudraker 腾云Doublecross 双头龙Grotusque 剑齿虎Repugnus 暴乱兽Chase 追捕Freeway ⾼速Rollbar 路障Searchlight 探照灯Wideload 宽载变形⾦刚之狂派(霸天虎)*S1、S2Megatron 威震天Starscream 红蜘蛛Thundercracker 惊天雷Skywarp 闹翻天Soundwave 声波Rumble 轰隆隆Frenzy 迷乱Ravage 机器狗Laserbeak 激光鸟Buzzsaw 锯齿鸟Reflector 照相机Bliztwing 闪电Astrotrain ⼤⽕车Shrapnel 弹⽚Kickback 反冲Bombshell 炸弹Thrust 冲锋Dirge 挽歌amjet 喷⽓机Devastator ⼤⼒神Bonecrusher 推⼟机Hook 吊钩Mixmaster 搅拌机Scavenger 清扫机Scrapper 铲⼟机Long Haul 拖⽃Menasor 飞天虎Motormaster 汽车⼤师Drag Strip 抢劫Deadend 封锁Breakdown 打击Wildrider 莽撞Bruticus 混天豹Onslaught 袭击Blast Off 爆炸V ortex 旋风Brawl 吵闹Swindle 诈骗Shockwave 震荡波*S3Galvatron 惊破天Cyclonus 狂飙Scourge 瘟疫Soundwave 声波Ratbat 机器蝙蝠Slugfest 剑龙Overkill ⾓龙Octane 毒⽓弹Trypticon 铁甲龙Predaking 冲云霄Razorclaw 利⽖Divebomb ⼤鹏Headstrong 铁头Tantrum 野⽜Rampage 猛虎Abominus 求⾬⿁Hun-Gurrr 龙头魔Blot 龙头妖Cutthroad 龙头精Rippersnapper龙头兽Sinnertwin 龙头怪Runabout 浪客Runamuck 游民*S4Sixshot 六⾯兽Scorponok 撒克Weirdwolf ⼈狼Skullcruncher 鳄龙indwipe 蝙蝠魔Apeface 猿猴Snapdragon 狂龙Misfire ⽕炭Slugslinger 吊索Triggerhappy 扳机Pounce 突击Wingspan 飞翔Battletrap 圈套Flywheels 飞轮============================[MTMTE版]变形⾦刚⼈物译名表(中英对照.全)[2007.06.12修订版][注:]深红⾊的⼈物名表⽰该⼈物的档案已经翻译完成.]【Autobot汽车⼈】Alphatrion钛师⽗Beachcomber巨浪Blaster录⾳机/Eject喷射/Ramhorn犀⽜/Rewind发条/Steeljaw钢钳/Slamdance剑舞者(Raindance⾬舞/Land Slam陆攻)Blue Streak蓝霹雳Blurr罗嗦Brawn⼤汉Bumblebee⼤黄蜂Cliffjumper飞过⼭Cosmos宇宙飞碟Defcon敌⽆双(MTMTE⾥⾯缺少此⼈物资料)Gears变速箱Grapple吊车Hound探长Hoist滑车Hot Rod热破/Rodimus Prime补天⼠Hubcap整流罩Huffer鲁莽Inferno消防车Ironhide铁⽪Jazz爵⼠Jetfire(Skyfire)天⽕Kup杯⼦Metroplex猛⼤帅/Six-Gun猛攻/Slammer班房/Scamper蹦蹦跳Mirage幻影Omega Supreme⼤⼒⾦刚Optimus Prime擎天柱/Roller⼩滚珠Outback腹地Perceptor感知器Pipes管⼦Powerglide滑翔机Prowl警车Ramchet救护车Red Alert红⾊警报Seaspray浪花Sideswipe横炮/Sunstreaker飞⽑腿Skids刹车Sky Lynx天猫号Smokescreen烟幕Swerve背离Tailgate挡板Tracks轮胎Trailbreaker开路先锋Ultra Magnus通天晓Warpath战戟Wheelie转轮Wheeljack千⽄顶Windcharger充电器Wreck-Gar营救车==============【Female Autobot⼥汽车⼈】Arcee阿尔西Chromia克劳莉娅(MTMTE⾥⾯缺少此⼈物资料)Elita One艾丽塔(MTMTE⾥⾯缺少此⼈物资料)Firestar⽕翼星(MTMTE⾥⾯缺少此⼈物资料)Moonracer⽉娇(MTMTE⾥⾯缺少此⼈物资料)==============【Dinobot(汽车⼈)恐龙⾦刚】Grimlock钢锁/Slag铁渣/Sludge淤泥/Snarl嚎叫/Swoop飞标==============【Throttlebot(汽车⼈)扼杀战⼠】Chase追捕/Goldbug⾦甲⾍/Freeway⾼速路/Rollbar路障/Searchlight探照灯/Wideload宽载==============【Double Spy(汽车⼈)双重间谍】Punch/Counterpunch出击(反击)==============【The Wreckers(汽车⼈)回收救援队】Roadbuster路霸/Whirl旋刃============【Jumpstreaker(汽车⼈)快速反应部队】Topspin上旋/Twin Twist双旋==============【Decepticon霸天虎】Cyclonus狂飙Dirge挽歌/Ramjet喷⽓机/Trust冲锋Magatron威震天/Galvatron惊破天Scourge瘟疫Shockwave震荡波Soundwave声波/Buzzsaw圆锯鸟/Frenzy迷乱/Laserbeak激光鸟/Overkill暴龙/Ravage机器狗/Ratbat蝙蝠精/Rumble轰隆隆/Slugfest剑龙/Squawkbox罗嗦⼤王(Beastbox话匣⼦/Squawktalk娘娘腔)Starscream红蜘蛛/Skywarp闹翻天/Thundercracker惊天雷Trypticon铁甲龙/Brunt冲击/Full-tilt全倾=============【Insecticon(霸天虎)机器昆⾍】Bombshell炸弹/Kickback反冲/Shrapnel弹⽚/Barrage弹幕/Chopshop屠夫/Ransack掠夺/Venom毒液=============【Duocon(霸天虎)⼆重⾦刚】Battletrap⽃阵/Flywheels飞轮=============【Battale Charger(霸天虎)突击部队】Runabout浪客/Runamuck游民=============【Reflector(霸天虎)照相机三⼈组】Viewfinder反光镜/Spectro快门/Spyglass闪光灯==============【Trichanger三变⾦刚】(汽车⼈)Broadside舷炮/Sandstorm沙暴/Springer弹簧(霸天虎)Astrotrain⼤⽕车/Blitzwing闪电/Octane毒⽓弹=============【Clone克隆战⼠】(汽车⼈)Cloudraker腾云/Fastlane浪⼦(霸天虎)Pounce突击/Wingspan飞翔=============【Combiner合体⾦刚】(汽车⼈)Technobots神风队Computron计算王/Afterburner烙铁/Lightspeed光速/Nosecone钻探机/Scattershot激光炮/Strafe 钢鞭Protectbots机器卫兵Defensor守护神/Blades⼑刃/First Aid急救员/Groove车辙/Hotspot热点/Streetwise⼤街Aerialbots飞⾏太保Superion⼤⽆畏/Air Raid空袭/Firelight飞⽕/Silverbolt银剑/Skydive 俯冲/Slingshot弹⼸(霸天虎)Terrorcons龙头部队Abominus求⾬⿁/Blot污点/Cutthroat割喉/Hun-Grrr饿龙/Rippersnapper裂齿/Sinnertwin双头龙Combaticons战车队Bruticus混天豹/Blast Off爆炸/Brawl吵闹/Onslaught袭击/Swindle诈骗/V ortex旋风Constructions挖地虎Devastator⼤⼒神/Bonecrusher碾压机/Hook吊钩/Long Haul拖⽃/Mixmaster搅拌机/Scavenger 清扫机/Scrapper铲⼟机Stunticons飞虎队Menasor飞天虎/Breakdown打击/Dead End封锁/Drag Strip抢劫/Motormaster汽车⼤师/Wildrider莽撞Seacons海怪组Piranacon海底狂魔/Nautilator海员/Overbite狂咬/Seawing海翼/Skalor迷津/Snaptrap突陷/Tentakill诱杀Predacons巨狰狞部队Predaking冲云霄/Divebomb⼤鹏/Headstrong铁头/Rampage猛虎/Razorclaw利⽖/Tantrum野⽜============【Sixchanger六变⾦刚】(霸天虎)Sixshot六⾯兽(汽车⼈)Quickswitch变⾊龙============【Univerer宇宙势⼒】Gatorcons古怪佬(MTMTE⾥⾯缺少此⼈物资料)Quintessons五⾯怪(MTMTE⾥⾯缺少此⼈物资料)Sharkticons鲨鱼怪Unicron宇宙⼤帝(MTMTE⾥⾯缺少此⼈物资料)Primus元始天尊(MTMTE⾥⾯缺少此⼈物资料)Primacron⾄尊太君(MTMTE⾥⾯缺少此⼈物资料)The Fallen堕落⾦刚(MTMTE⾥⾯缺少此⼈物资料)============【Micromaster微型战⼠】(汽车⼈)[Micromaster Rocket Base⽕箭基地微型战⼠]Countdown倒计时(汽车⼈微型战⼠⾸领)[Micromaster Base基地微型战⼠]Groundshaker地震[Micromaster Battle Station战⽃岗哨微型战⼠]Hot House暖房Iron Work铁汉[Micromaster Transport装甲微型战⼠]Erector建筑⼯Overload超载[Micromaster Patrol微型战⼠⼩队]Hot Rod Patrol暴⾛⽼爷车队Big Daddy⼤腕(队长)/Greaser阔少/Hubs阿飞/Trip-Up刺头Monster Truck Patrol⼤脚卡车队Hydraulic液压箱(队长)/Big Hauler托运/Heavy Tread⼤脚/SlowPoke慢半拍Battle Patrol战⽃队Big Shot⼤炮(队长)/Flak轰天雷/Sidetrack侧炮/Sunrunner逐⽇Air Patrol空中巡逻队Eagle Eye鹰眼(队长)/Blaze Master⽕烧云/Sky High冲天豹/Tread Bolt空中霹雳Construction Patrol建筑队Takedown拆解(⼯头)/Crumble粉碎/Groundpounder挖掘机/Neutro泥球Rescue Patrol营救队Fixit救星(队长)/Red Hot⽕线/Stakeout千⾥眼/Seawatch海援Race Car Patrol跑车队Road Handler路虎(队长)/Free Wheeler⼩旋风/Swindler智多星/Tailspin尾旋Off Road Patrol越野队Powertrain动⼒机车(队长)/Highjump跳涧虎/Mudslinger挡泥板/Tote⼩霸王(霸天虎)[Micromaster Jet Command Center飞机指挥中⼼微型战⼠]Skystalker天⾏者(霸天虎微型战⼠⾸领)[Micromaster Base基地微型战⼠]Skyhopper⿎上蚤[Micromaster Transport装甲微型战⼠]Flattop⽔上飞Roughstuff暴⾏[Micromaster Battle Station战⽃岗哨微型战⼠]Airwave⽓浪Greasepit油标[Micromaster Patrol微型战⼠⼩队]Race Track Patrol巡路队Barricade没遮拦(队长)/Motorhead动⼒先锋/Ground Hog旱獭/Roller Force拦路虎Sport Car Patrol赛车队Blackjack胁迫(队长)/Detour绕⾏/Hyperdrive插翅虎/Road Hugger矮脚虎Military Patrol武装队Bombshock霹雳⽕(队长)/Dropshot俯射/Growl咆哮/Tracer⿁难缠Air Strike Patrol空袭队Whisper风语者(队长)/Nightflight夜⾏/Storm Cloud暴风云/Tailwind顺风=============【Micromaster Combiner组合微型战⼠】(汽车⼈)[Micromaster Combiner Transport装甲组合微型战⼠][Missile Launcher Transport导弹发射车] Retro回转/Surge滑绳[Tanker Truck Transport油罐运输车] Gusher喷油井/Pipeline输油管[Micromaster Combiner Battlefield Headquarters战场总部组合微型战⼠]Overflow冒顶/Full-Barrel满载[Astro Squad航空班]Missile Master导弹⼤师(班长)/Moonrock⽉⽯Barrage倾泻/Heave拖车Blast Master⽕神炮/Phaser移相器[Metro Squad都市班]Oiler油商(班长)/Slide储油罐Powerrun强⾏/Strikedown击沉Roadburner⽕流星/Whelblaze风⽕轮(霸天虎)[Micromaster Combiner Transport装甲组合微型战⼠][Cannon Transport加农炮车]Cement-Head⽔泥头/Terror-Tread巨灵神[Micromaster Combiner Anti-Aircraft Base防空基地组合微型战⼠]Blackout眩晕/Spaceshot空射[Battle Squad战⽃班]Direct-Hit直击(班长)/Power Punch加农炮Vanquish征服/Fireshot⽕枪Half-Track半履带/Meltdown熔炉[Constructor Squad建⼯班]Hammer铁锤(班长)/Sledge雪橇Excavator开凿机/Stonecrusher碎⽯器Grit砂砾/Knockout锄耕机==================【Headmaster头领战⼠】(汽车⼈)Brainstorm⼩诸葛/Arcana阿卡纳Chromedome电脑怪杰/Stylor斯泰勒Fortress Maximus巨⽆霸/Cerebros塞伯罗斯/Spike斯派克/Cog齿轮(Gasket垫圈/Gromment 索环) Hardhead⽼顽固/Duros杜罗丝Highbrow海龙/Gort⾼特Hosehead消防栓/Lug拉格Nightbeat夜巡/Muzzle禁⾔Siren警笛/Quig贵格(霸天虎)Frangy天狼/Brisko布⾥斯科Horri-Bull魔⽜/Kerb路⽯Mindwipe蝙蝠魔/V orath沃拉斯Scorponok萨克巨⼈/Lord Zark扎克领主/Fasttrack紧追Skullcruncher鳄龙/Grax格拉斯Squeezeplay蝰蛇/Lokos洛克斯Weirdwolf狂狼/Monzo蒙佐=======================【Headmaster Horrorcon(霸天虎)三变头领战⼠】Apeface猿⾯/Spasma痉挛Snapdragon狂龙/Krunk克伦科=======================【Action Master⾏动战⼠】(汽车⼈)Jackpot赌注/Sights乌鸦Kick Off踢飞/Turbo-Pack涡轮包Mainframe主机/Push-Button按钮机器⼈Over-Run蔓延/Attack Coptor攻击直升机Rad瑞德/Lionizer机器狮⼦Rollout突破/Glitch扰波器Skyfall空降/Top-Heavy⾓犀Sprocket链齿/Attack Cruiser攻击吉普(霸天虎)Axer利斧/Turbo Cycle涡轮摩托Banzai-Tron⽴地太岁/Razor-Sharp利齿蟹Gutcruncher搅碎机/Stratotronic Jet超⾳速战⽃机Krok虎睛/Gatoraider鳄鱼Treadshot跳射/Catgut雌狮========================【Firecon(霸天虎)⽕焰⾦刚】Cindersaur灰烬Flamefeather烈焰Sparktalker⽕苗===============【Sparkbot(汽车⼈)⽕花战⼠】Fizzle闪灭Guzzzle闪耀Sizzle闪现===============【Monsterbot(汽车⼈)野兽组】Doublecross双头翼龙Grotusque翼虎Repugnus异形===============【Ominbot(汽车⼈)全向车部队】Camshaft轮轴Downshit摘档Overdrive超速===============【Targetmaster先锋战⼠】(汽车⼈)Blurr罗嗦/Haywire乱线头Crosshairs瞄准器/Pinpointer准星Hot Rod热破/Firebolt霹雳Kup杯⼦/Recoil后座⼒Landfill掩埋/Silencersilencer消⾳器/Flintlock燧⽯枪Pointblank直射/Peacemaker和事佬Quickmix速混/Ricochet跳弹/Boomer临时⼯Scoop挖掘机/Tracer曳光弹/Holepunch打孔机Sureshot神枪⼿/Spoilsport扫兴(霸天虎)Cyclonus狂飙/Nightstick警棍Misfire死⽕/Aimless散漫Needlenose⼩⼼眼/Sunbeam⽇光/Zigzag⽉读Quake地震/Tiptop顶点/Herter赫尔特Scourge瘟疫/Fracas喧哗Slugslinger⽕炭/Caliburst半兽⼈Spinister刺蛇/Singe刺痛/Hairsplitter挑刺Triggerhappy扳机/Blowpipe吹管===============【Triggerbot扳机战⼠】(汽车⼈)Dogfight激⽃Override飞跃Backstreet后街(霸天虎)Crankcase曲轴箱Ruckus骚动Windsweeper扫风===============【Powermaster能量战⼠】(汽车⼈)Gataway跑路/Rev转速Joyride兜风/Hotwire热线Slapdash急先锋/Lube润滑油(霸天虎)Darkwing⿊翼/Throttle扼杀Dreadwind阴风/Hi-Test⿁⽕(两⾯派)Doubledealer⽆间⾏者/(汽车⼈)Knok刚/(霸天虎)Skar宿=============================【Pretender隐者战⼠】(汽车⼈)Landmine地雷Catilla虎符Chainclaw⼤熊Cloudburst豪⾬Crossblades⼗字⼑Doubleheader双头佛Groundbreaker草上飞Gunrunner军⽕Longtooth长⽛Pincher蝎钳Sky High摸着天Sky hammer天锤Splashdown溅落Vroom呜隆隆Waverider踏浪(霸天虎)Skullgrin⾻裂Bludgeon雷震Bomb-Burst爆弹Bugly臭⾍Carnivac饿狼Finback长须鲸Iguanus⾓蜥Octopunch⼋⽖鱼Roadblock路栅Roadgrabber拦路匪Snarler狂嚎Stranglehold窒息Submarauder⽔贼Thunderwing雷翼========【Printender Monster(霸天虎)隐者怪兽组】Birdbrain秃鹫Bristleback豪猪Icepick飞猿Scowl怒嚎Slog蹒跚Wildfly⽯像⿁Monstructor巨魔兽===========Mini-Spies迷你间谍===========Powerdashers冲锋队其他⼈物汽车⼈:Bumper缓冲器Backbeat节拍Gizmo⼩灵通霸天虎:Sunstorm太阳风。
spyglass培训
Reset synchronization
CDC常见问题
规则检查的必要性
• Early Design Closure:加快项目进度、降低风险、 降低成本
规则检查的必要性
• CDC检查可以发现仿真、FPGA测试很 难发现的跨时域问题
可以检查出基本的复位、时钟是否使用 正确 对跨时域设计进行评估检查 对潜在的跨时域处理问题进行检查
Spyglass软件介绍
运行
spyglass 命令启动软件
应用举例……
• 输入file list 和sgdc约束文件
CDC检查UI步骤
• 读取源文件
CDC检查UI步骤
• 选择goals并运行
CDC检查UI步骤 goal helps
选择6个goals
• debug
CDC检查UI步骤
CDC常见问题
• CDC常见问题
• 规则检查工具
• ATRENTA:Spyglass • Synopsys:leda
• NOVAS:nlint
• Mentor:DesignChecker • Aldec:Active-HDL
Spyglass软件介绍
• 功能
目前 license支 持的功能
Spyglass软件介绍
• 功能 Metastability
CDC常见问题 错误!
正确!
Reconvergence
CDC常见问题 错误!
Spy Sweeper Enterprise 产品说明书

Privacy. Protection. Peace of Mind.Protect Corporate Assets from SpywareSpy Sweeper EnterpriseCorporations are battling a dangerous security threat that existing security technologies do not adequately address - spyware. Spyware, which includes malware, trackware and adware, describes any program that may track online and/or offl ine PC activity and transmit those fi ndings to third parties without usersʼ knowledge or consent.Spy Sweeper Enterprise complements other necessary security measures, including antivirus, fi rewall and intrusion prevention solutions. While all of these technologies offer some level of protection against spyware and adware, the risk corporations face from preventing only some of the infections is far too great. The most nefarious forms of spyware are growing at the highest rates, and it only takes one keylogger or Trojan horse to cause detrimental effects to a corporation. The adverse effects of spyware, adware and other potentially unwanted programs in a corporation include:• Unnecessary burden on IT staff • User downtime• Increased bandwidth consumption• Diminished workstation performance and corporate network stability • Compromised security of intellectual propertyWebroot Software has been dedicated to fi ghting spyware and adware since the threats fi rst began to emerge. As spyware becomes more and more insidious, spyware developers are using variations of old tricks to bypass new solutions. Relying on a comprehensive solution with the most technically advanced threat research team is the only choice in corporate spyware defense.Spy Sweeper Enterprise is an award-winning corporate anti-spyware solution that offers the most comprehensive desktop-level spyware protection for corporations. Providing the most advanced detection and removal of spyware available, Spy Sweeper Enterprise actively defends against all types of spyware, adware, and other potentially unwanted programs, including Trojan horses, system monitors, keyloggers and more.Spy Sweeper Enterprise provides:• Centralized management using the admin console• Performance and scalability for comprehensive network-wide spyware protection • Automated or manual deployment of spyware defi nitions and product updates • Sweep setting retention and new defi nition downloads for laptop and remote users • Confi gurable sweep schedules with ability to sweep workstations on demand • Ability to create fl exible protection policies by group or workstation• Customizable, detailed reports, summaries and alerting capabilities on detected spywareSpyware Statistics92% of IT managers believe their organization has a spyware infection.~ Web @ Work Study Nine out of 10 PCs connected to the Internet have spyware.~ National Cyber Security Alliance,June 2003An average corporate PC has 20 pieces spyware. Every 8 out of 100 scans revelas a system monitor, while 6 out of 100 detect a Trojan Horse.~ Results from CorporateSpy Audit by Webroot Software IT managers, 40% of which admit they have been hit by spyware, sustain that spyware “infections” are constantly increasing.~ Adam Sehovic Mobile News,June 2004Webroot Software, Inc.2560 55th Street, Boulder, CO 80301Toll Free: 800.870.8102Telephone: 303.442.3813Facsimilie:303.442.3846Only the best...System RequirementsServer:OS: Windows NT 4.0 SP5 or higher, Windows 2000, Windows XP, Windows Server 2003CPU: 200 MHz minimum; 350 MHz or better recommended Memory: 512 MB recommended Disk: 30 MB free disk space for operation. Additional free disk space necessary for database growth. 1 GB freedisk space recommended. Client:OS: Windows 98, 2000, ME, XP, or NT 4.0CPU: 150 MHz or better recommended Memory: 32 MB RAM minimum; 128 MB RAM or better recommended Disk: 15 MB free disk space• Most comprehensive spyware protection available • Full technical support • Automated Spy Research Capability • Most fl exible andpowerful management • Highly scalable architectureWebroot ® Spy Sweeper Enterprise: Key FeaturesCentralized ManagementUsing the centralized admin console, IT administrators confi gure and automate the deployment of defi nitions, policies, sweep schedules and program updates to clients. Administrators can deploy the client to be invisible to end users, visible with user control over specifi c settings, or run in administrative mode with full control for advanced users.Seamless, Scalable DeploymentDeveloped with corporations needs in mind, Spy Sweeper Enterprise is easily scalable to fi t companies of all sizes. Spy Sweeper Enterprise is seamlessly deployed throughout the organization using login script, internal software management solution, or Group Policy in Active Directory.Powerful Sweep SettingsSpy Sweeper Enterprise scans for spyware using a regularly updated database of known spyware threats. IT administrators specify sweep schedules, establish policies for automated quarantine and removal of spyware, confi gure settings for coverage of fi les, memory, and registry in sweeps, and uncover any software that should not be removed for selectedgroups (e.g. authorized system monitoring tools used by IT). The lock down feature allows administrators to dictate network and workstation settings for compliance with the corporate security policy.Laptop and Remote User ManagementSpy Sweeper Enterprise retains the enforcement of administrator-set policies for laptop and remote users while away from the network. Laptop and mobile users directly check the Webroot update server for new defi nition updates while not connected to the corporate network, so that users continue to receive the most-up-to-date protection from spyware and adware threats.Real-time ProtectionSpy Sweeper Enterprise incorporates multiple Active Shields to proactively protect the most common spyware entry points, including changes to system memory, registry entries, host fi les, start-up processes, browser-hijackings and additional security settings. During a sweep, Spy Sweeper Enterprise immediately quarantines spyware programs that match the threat database to disable spyware functionality for immediate protection, until an administrator decides to restore or permanently remove the program.Webroot Threat Research Center Spy Sweeper Enterpriseʼs spyware defi nition database is frequently updated to counter the constantly evolving spyware threat. With the most advanced, technically effi cient spyware detection process, the Webroot Threat Research Center uses automated processes to locate spyware before an end user is infected.Reporting and AlertingBroad reporting features provide executive summaries, spy reports, and status updates.Administrators can modify reports to provide analysis of the spyware threat by workstation, group, type detected, and time. In addition, alert settings allow administrators to confi gure multiple email addresses and notifi cation options to guarantee the correct people in the organization are informed when a threat is detected.Customer SupportSpy Sweeper Enterprise is backed by an expert team of dedicated technicians, with customer support offered via web-based ticketing system, email and toll-free phone to address any spyware-related issues.© 2002 - 2004 Webroot Software, Inc. — All rights reserved. No part of this publication may be reproduced, photocopied, stored on a retrieval system, or transmitted without the prior consent of Webroot Software, Inc. Webroot, Spy Sweeper, Webroot Spy Sweeper Enterprise and their logos are registered trademarks of Webroot Software, Inc.About Webroot Software, Inc.Webroot Software, a privately held company based in Boulder, Colorado, creates innovative privacy, protection and performance products and services for millions of users around the world, ranging from enterprises, Internet service providers, banking institutions, government agencies and educational entities, to small businesses and individuals. The company provides a suite of high-quality, easy-to-use software that guides and empowers users as they surf the Web, protecting proprietary information and returning control over computing environments. Webrootʼs software consistently receives top ratings and recommendations by respected third-party media and product reviewers.。
Spyglass软件应用培训(个人总结,部门培训)

Reset synchronization
CDC常见问题 常见问题
错误!
正确!
Metastability
CDC常见问题 常见问题 错误!
正确!
Reconvergence
CDC常见问题 常见问题 错误!
正确!
Data hold problem (data loss) 错误!
CDC常见问题 常见问题
Spyglass软件应用培训
2011.9.22
内容
– – – – – – 规则检查的必要性 Spyglass软件介绍 规则检查一般步骤 RTL规则检查的TCL应用方式 CDC检查UI操作一般步骤 常见夸时域处理方式介绍
规则检查的必要性
• 执行部门编码设计规范、规范代码风格
增强代码通用性、一致性 提高代码执行效率 增强代码可读性,便于后期维护 检查通用约定 其他…
failed
Data hold problem (data loss) 正确!
CDC常见问题 常见问题
Design intent across clock domains
Handshake FIFO
CDC常见问题 常见问题
Design intent across clock domains
Handshake
• 规则检查工具
• ATRENTA:Spyglass : • Synopsys:leda • NOVAS:nlint • Mentor:DesignChecker • Aldec:Active-HDL
Spyglass软件介绍 软件介绍
• 功能
目前 license支 持的功能
Spyglass软件介绍 软件介绍
req==0
SynopsysSpyGlassCDC学习(二)
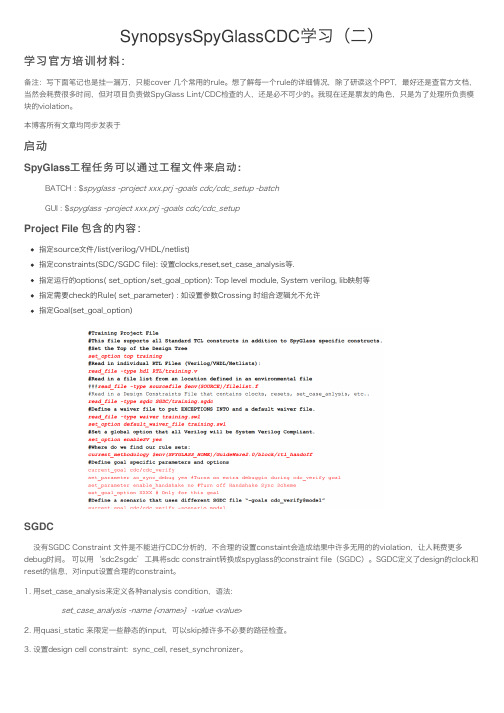
SynopsysSpyGlassCDC学习(⼆)学习官⽅培训材料:备注:写下⾯笔记也是挂⼀漏万,只能cover ⼏个常⽤的rule。
想了解每⼀个rule的详细情况,除了研读这个PPT,最好还是查官⽅⽂档,当然会耗费很多时间,但对项⽬负责做SpyGlass Lint/CDC检查的⼈,还是必不可少的。
我现在还是票友的⾓⾊,只是为了处理所负责模块的violation。
本博客所有⽂章均同步发表于启动SpyGlass⼯程任务可以通过⼯程⽂件来启动:BATCH : $spyglass -project xxx.prj -goals cdc/cdc_setup -batchGUI : $spyglass -project xxx.prj -goals cdc/cdc_setupProject File 包含的内容:指定source⽂件/list(verilog/VHDL/netlist)指定constraints(SDC/SGDC file): 设置clocks,reset,set_case_analysis等.指定运⾏的options( set_option/set_goal_option): Top level module, System verilog, lib映射等指定需要check的Rule( set_parameter) : 如设置参数Crossing 时组合逻辑允不允许指定Goal(set_goal_option)SGDC没有SGDC Constraint ⽂件是不能进⾏CDC分析的,不合理的设置constaint会造成结果中许多⽆⽤的的violation,让⼈耗费更多debug时间。
可以⽤‘sdc2sgdc’⼯具将sdc constraint转换成spyglass的constraint file(SGDC)。
SGDC定义了design的clock和reset的信息,对input设置合理的constraint。
外研版高中英语必修六_单词中英文
外研版高中英语必修六_单词中英文英文词性中文1small talk1闲谈,聊天2informal adj.2非正式的3serious adj.3严肃的4confidently adv.4自信地5make friends5交朋友,建立友谊6lack v.6缺乏,缺少7(be) nervous about7对……神经紧张/害怕/胆怯/焦虑不安8advance adj.8预先的,在前的9think of9想起,回忆起10nod v.10点头11body language11身体语言,肢体语言12yawn v.12打呵欠13sigh v.13叹气,叹息14look away from14把目光从……移开15social rules15社交规则16in addition16除此之外,另外17find out17了解(到);找出(信息)18opportunity n.18机会19obligation n.19责任;义务20prize n.20奖品,奖金21application n.21申请22form n.22表格23immigration n.23移民24visa n.24签证25impolite adj.25不礼貌的11外研版高中英语单词选修六外研版高中英语单词选修六外研版高中英语单词选修六外研版高中英语单词选修六26tidy v.26使……整洁,整理27refund n.27退款28favour n.28恩惠,照顾29reception n.29欢迎会;招待会30embassy n.30使馆31certain pron.31某些32reply n.32回答,答复,回信33saleswoman n.33女推销员,女销售员34firm n.34公司35fax n.35传真(机)36outspoken adj.36直言不讳的,坦率的,不客气的37human being37人类38motto n.38座右铭,格言39put one’s foot in one’s mouth39犯使人难堪的错误,说错话40shortcoming n.40缺点,短处41absence n.41缺乏,不存在42as a consequence42因此,结果43systematic adj.43非偶然的,经常的44coincidence n.44巧合45customer n.45顾客,客户46mature adj.46成熟的47awkward adj.47尴尬的48tease v.48戏弄,嘲弄,揶揄49typist n.49打字员50contradict v.50反驳22外研版高中英语单词选修六外研版高中英语单词选修六51pregnant adj.51怀孕的52apology n.52道歉,致歉53cautious adj.53谨慎的,慎重的,小心的54acquaintance n.54熟人55messy adj.55棘手的,难办的56divorce n.56离婚,离异57cheer sb. up57使某人高兴/振作起来58fool n.58傻瓜,笨蛋59clerk n.59职员,办事员60haircut n.60发型,发式61anyhow adv.61不管怎么说,无论如何62modest adj.62谦虚的,谦逊的63brunch n.63早午餐64anniversary n.64周年纪念日65hostess n.65女主人66interrupt v.66打断67leave out67省去,删去68factual adj.68实际的,事实的,确实的69genuine adj.69纯粹的,真正的,真实的70hospitable adj.70好客的,殷勤的71secretive adj.71秘而不宣的,隐藏的72violate v.72骚扰,妨碍,侵犯73define v.73解释,给……下定义74(be) aware of74知道75take the lead75带头,领先33外研版高中英语单词选修六外研版高中英语单词选修六76graciously adv.76优雅地77show off77炫耀78function n.78功能79psychologist n.79心理学家80successful adj.80成功的81formula n.81法则;原则82imagine v.82想象83purpose n.83目的84circumstance n.84情形,情况85apologise v.85道歉86series n.86系列,丛书87subtle adj.87精致的,精巧的88amber n.88琥珀89spyglass n.89小型望远镜90heroine n.90(小说、电影中的)女主角91hero n.91(小说、电影中的)男主角92play an important part in92在…中起重要作用93novel n.93小说94philosophical adj.94哲学的;达观的95direction n.95方向96vanish v.96消失97behave v.97表现,举动98bush n.98灌木,矮树99definitely adv.99确定地,一定地100hesitate v.100犹豫,迟疑44外研版高中英语单词选修六外研版高中英语单词选修六101scent n.101气味,香味,芳香102doubt n.102怀疑103direction n.103方向104rub v.104蹭,摩擦105knuckle n.105指节,掌指关节106bite v.106咬,咬伤107pad n.107(有规律地)悄悄行走108stupefied adj.108神志不清的,昏昏沉沉的109exhaustion n.109疲惫,精疲力竭110tabby n.110斑猫111put ... down111放下112hold out112伸出113come up to113朝……走过来114longing n.114渴望115scald v.115热泪盈眶116turn away116走开117patrol v.117巡逻,巡查118hornbeam n.118角树,(植)鹅耳枥119paw n.119爪子120pat v.120轻拍,轻打121invisible adj.121看不见的122arch v.122拱起,成弓形123tail n.123尾巴124stiffly adv.124僵硬地,不灵活地125alertly adv.125警觉地,警惕地55外研版高中英语单词选修六外研版高中英语单词选修六126patch n.126(与周围部分不同的)斑,小块127hedge n.127灌木(或小树)树篱128alarm n.128惊慌,恐慌129sniff v.129(以鼻)吸气,嗅,闻130whisker n.130(猫的)胡须,触须131twitch v.131抽动,颤动132wariness n.132谨慎,小心133blink v.133眨眼睛134sweep over134向……扩展135keep one’s yes on135注视,盯着看,注意136fix on136注视,凝视137cast about137寻找,搜寻,想办法138edge n.138边,边缘139roughly adv.139大概地,粗略地140square adj.140正方形的141shape n.141形状142level adj.142同高度的143profoundly adv.143深深地,极度地144alien adj.144其他种族的;外国的145entice v.145吸引,诱使146stoop v.146俯身,弯腰147swim v.147眩晕,头昏眼花148thump v.148(由于兴奋)砰砰直跳149scramble v.149爬,攀150fabric n.150结构,框架66外研版高中英语单词选修六外研版高中英语单词选修六151palm n.151棕榈树152boulevard n.152林荫大道,大街153utterly adv.153完全地,绝对地154(be) laden with154(空气中)充溢(某种味道)155prospect n.155视野,景象,景色156slope n.156斜坡,斜面157parkland n.157公共绿地158grove n.158树丛小树林159gleam n.159亮光,反光160bare adj.160光秃秃的161bend v.161弯腰,屈身162shudder n.162战栗,发抖163dawning adj.163开始出现的,开始发展的164light-headedness n.164头晕,眩晕165dream v.165做梦166awake adj.166醒着的,清醒的167look around for167四处寻找168revenge v.168报仇,复仇169marry v.169结婚,娶,嫁170wicked adj.170邪恶的171cottage n.171小屋172put a spell on172用咒符镇住173punish v.173惩罚174appeal n.174吸引力,魅力175cafeteria n.175自助餐厅77外研版高中英语单词选修六外研版高中英语单词选修六176envelope n.176信封177literary adj.177文学的178bond n.178纽带,接合剂,黏合剂179output n.179(文学等的)作品数量180schoolchildren n.180小学生,学童181typewriter n.181打字机182stateswoman n.182在某一领域受尊敬的女性领导人物183gifted adj.183有天才的,有天赋的184roots n.184(喻)根,根基185flesh n.185肉186(be) associated with186与……有联系187format n.187(节目等的),安排188anecdote n.188趣闻,轶事189draft n.189草稿190burden n.190负担,重负191swift adj.191快的,迅速的192stubborn adj.192顽强的,坚持的193overcome v.193克服194adjustment n.194调整195automatic adj.195自动的,习惯性的196target n.196(批评等的)对象197criticism n.197批评,评论198appeal to sb.198对某人有吸引力199curriculum n.199课程200(be) restricted to200限于88外研版高中英语单词选修六外研版高中英语单词选修六201distribute v.201(书报的)发行202accumulate v.202积累,积聚203deposit n.203存款204thus adv.204因此,所以205attain v.205达到,得到206status n.206身份,地位207billionaire n.207亿万富翁,巨富208wardrobe n.208衣橱209sorrow n.209悲哀,伤心,苦难210ahead of210在……前面211ought v.211应该,应当212inquisitive adj.212好奇的213look back ov er one’s shoulder213回头看214catch a glimpse of214瞥见215set out215出发,动身216crunch n.216嘎吱嘎吱的声音217pitter-patter217劈里啪啦的声218glossy adj.218有光泽的219trail v.219拖,曳,拖着走220muffler n.220围巾221curly adj.221(头发)卷曲的222gracious int.222(表惊讶)天哪!哎呀!223exclaim v.223惊叫,大叫224elf n.224小精灵225magical adj.225魔法的;不可思议的99外研版高中英语单词选修六外研版高中英语单词选修六226power n.226力量,能力227dwarf n.227侏儒,小矮人228possess v.228拥有229interpersonal adj.229人际关系的230close adj.230亲密的,亲近的231trust v.231信赖,信任232chat v.232闲谈,聊天233note n.233钞票,纸币234burst out234突然发生235knock ... over235(开车)撞伤,撞死236financially adv.236财政上地237moody adj.237喜怒无常的238lose interest in238对……失去兴趣239from time to time239偶尔,有时240cloakroom n.240衣帽间,临时寄物处241turn round241转过身来242amount n.242数量243locker n.243(带锁的)衣物柜244fair n.244义卖会245raise v.245筹措(金钱)246raise money246筹款247theft n.247偷,盗窃248swing v.248(使)旋转249confront v.249面对(危险、困难)250count v.250数1010外研版高中英语单词选修六外研版高中英语单词选修六251underneath prep.251在……下面252on the phone252在通电话253lively adj.253活泼的,有生气的254quarrel v.254吵架255make up255和好,和解256regret v.256后悔,悔恨257keep in touch257保持联系258lose touch with258与……失去联系259sweets n.259糖果260alike adj.260相像的,相似的261(be) ashamed of261对……感到惭愧/羞耻262betray v.262背叛263considerate adj.263体贴的,考虑周到的264forgive v.264原谅,宽恕265loss n.265损失266scold266责备,申斥267hurt adj.267(感到)痛苦的268(be) blessed with268享有……的福气269bungalow n.269(有平台的)平房270pine n.270松树271worm n.271虫,蠕虫,蚯蚓272cage n.272笼子273(be) allergic to273对……过敏274tiny adj.274细小的,细微的,微小的275swell v.275肿,肿大1111外研版高中英语单词选修六外研版高中英语单词选修六276walnut n.276胡桃277squirrel n.277松鼠278ripen v.278成熟279harvest n.279收获280slide v.280滑,滑行,滑落281stony adj.281石头的,多石的282loch n.282(狭长的)海湾283spray n.283水花,浪花284carpenter n.284木匠,木工285broom n.285扫帚286cigar n.286雪茄287slip v.287滑倒,失足288damp adj.288潮湿的289scratch v.289擦伤,划伤290heel n.290脚后跟,踵部291tear v.291撕破,撕裂292underwear n.292内衣293(be) on good terms with293与某人关系很好294salute n.294致敬,行礼295spy n.295间谍,侦探296perfect adj.296完美的297acute adj.297剧烈的,急剧的298privilege n.298权利,特权299(be) nostalgic for299对……很怀念300rewind v.300倒(磁带),倒回去1212外研版高中英语单词选修六外研版高中英语单词选修六301predic v.301预言,预测302click v.302有相同想法303Auld Lang Syne303友谊地久天长304pilgrim n.304朝圣者305glowing adj.305炽热的,发光的306murmur v.306低声说,喃喃道307flee v.307逃跑,逃走308pace v.308踱步走309amid prep.309在……中310liar n.310撒谎者311reiterate v.311反复地说,重述312bud n.312(花、叶)苞,蓓蕾313tread v.313踩,踏314all at once314突然,忽然315auld adj.315老的,旧的316bring ... to mind316使……想起317in return317反过来,作为交换318reunite318重聚319couple n.319夫妇320partner n.320合伙人,共同出资人321mention v.321提到,涉及322belong to322属于323bottom n.323底部,底端324from the bottom of one’s heart324真心诚意地325relative n.325亲戚,亲属1313外研版高中英语单词选修六外研版高中英语单词选修六326give concerts326举办音乐会327conservatory n.327音乐学院328soloist n.328独奏者;独唱者329repertoire n.329演奏曲目,演出节目330interpret v.330诠释,解释;翻译331(be) true of / for331与……情况相同332folk song332民歌333characteristic n.333特征,特性,特质334poetry n.334诗歌335poetic adj.335有诗意的;诗的336give life to336赋予……生命337(be) the same with337与……情况相同338combine v.338结合,联合339depress v.339使沮丧,使意志消沉340share feelings and ideas with340与……分享感受与想法341make contact with341与……进行来往342master musician342音乐大师343compose music343创作乐曲344ambition344345regarding n.345志气,抱负,雄心346melody n.346旋律347rhyme n.347押韵,韵348passerby n.348过路人,行349pedestrian n.349行人,步行者350semi-circle n.350半圆1414外研版高中英语单词选修六外研版高中英语单词选修六351interval n.351间隔,空隙352plug v.352插上(插头)353socket n.353插座354regulate v.354规定,管理,整顿355organ n.355风琴,手摇风琴356echo v.356回响357side road n.357小路,支路358quartet n.358四重奏,四重奏乐队359suite n.359组曲360session n.360从事某项活动的集会361saucer n.361茶碟,茶托362voluntary adj.362自愿的363shrink v.363变小,减少364vacant adj.364空的,空缺的365lid n.365盖,盖子366barrel organ366手摇风琴367handle n.367柄,把手368tap v.368轻拍,轻敲,轻叩369mop v.369擦,揩(脸、汗等)370spotted adj.370有污迹的,有斑点的371all of a sudden371突然间372popcorn n.372爆米花373dance to the music373伴着音乐跳舞374rockabilly n.374乡村摇滚乐375tunnel n.375隧道,地道1515外研版高中英语单词选修六外研版高中英语单词选修六376relay v.376转播,接转377liveliness n.377活泼,快乐,生动378relief n.378(痛苦)解除,减轻379relax v.379使放松,使轻松380collection n.380收藏;收藏品381charm v.381吸引,使陶醉382arena n.382舞台383scene n.383活动领域384billboard n.384告示牌,广告牌385draw upon385利用,凭借,依赖386signify v.386表示,表明387symbolic adj.387象征的,作为象征的388numerology n.388数字命理学389mythology n.389神话390hairpin n.390发卡,发夹391chamber adj.391室内(音乐)的392honour v.392尊敬,敬重393heritage n.393遗产394present v.394赠送,颁发(礼物等)395in addition to395除此之外396statuette396小雕(塑)像397gramophone n.397留声机398critic n.398(文艺)批评家399therefore adv.399因此,所以400clone v.400克隆1616外研版高中英语单词选修六外研版高中英语单词选修六401terrify v.401使惊恐,使受惊吓402wrinkled adj.402(皮肤等)布满皱纹的403wing n.403翅膀404chase v.404追逐,追赶,追踪405disgust v.405使觉得恶心;使厌烦406emotion n.406感情;情绪407fiancée n.407未婚妻408murder v.408谋杀409refuse v.409拒绝410burn out410(火)燃尽,烧完自灭411breathe v.411呼吸412vein n.412血管;静脉413contrast v.413对照414contrast with414与……形成对照415rush v.415冲,猛冲416throw oneself on ...416扑倒在……上417fear n.417害怕,恐惧418make a sound418发出声音419again and again419一再,屡次420nightmare n.420噩梦421gene n.421基因422identical adj.422完全相同的,同一的423beneficial adj.423有益的,有用的424by mistake424错误地425cure v.425治愈1717外研版高中英语单词选修六外研版高中英语单词选修六426treat ... as426把……当成……对待427imaginary adj.427假想的,虚构的428head n.428头目,领导429incredible adj.429难以置信的430nonsense n.430胡说八道,胡扯431acid adj.431酸(性)的432bacteria n.432细菌433embryo n.433胚胎434enzyme n.434酶435tissue n.435(生理)组织436organism n.436有机体437stem cell437干细胞438upbringing n.438抚育,养育439genetic adj.439基因的;遗传学的440make-up n.440构成,构造441genetics n.441遗传学442transparent adj.442透明的443twisting adj.443扭曲的,弯曲的444fundamental adj.444基本的,不可或缺的445component n.445成分446pea n.446豌豆447procedure n.447程序448unzip v.448解开449 a sequence of449一系列的450insert v.450植入,插入1818外研版高中英语单词选修六外研版高中英语单词选修六451(be) identical to451和……一样,与……一致452controversial adj.452有争议的453valid adj.453有确实根据的,有效的454optional adj.454可选择的455reproduce v.455复制,使再现456exceptional adj.456特别的,非凡的,卓越的457contradictory adj.457互相矛盾的,相反的458vice n.458缺点,弱点459virtue n.459道德上的优点,善行460flexible adj.460易适应的461compulsory adj.461强制的,强迫的462regulaton n.462法规,条例i463handy adj.463方便的,便利的464resist v.464抵抗465sow v.465播种466rot n.466(细菌引起的)腐败病467pest n.467害虫468rely on468依靠,依赖469biodiversity n.469生物多样性470breed n.470(动植物的)品种471analyse v.471分析472suspect n.472嫌疑人473saliva n.473唾液,口水474spit v.474吐出(唾液)475fingernail n.475手指甲1919。
北軟 GuardEyes 旗艦版 说明书

版權宣告北軟股份有限公司(以下簡稱北軟公司)有權變更本手冊的內容,如手冊內容與實際產品不符,以實際產品為準,恕不另行通知。
除非另外註明,否則本手冊範例中所使用的公司、組織、產品、人名以及資料都是虛構的。
沒有北軟公司的書面許可,您不得為任何目的而使用任何形式或方法(電子的或機械的)複製或傳送本手冊的任何部分。
北軟公司對於其應用程式、商標、版權或檔案中所涵蓋的其他智慧財產權擁有專利或正在申請專利中。
除非取得北軟公司的書面授權,否則不得擅用本手冊中的這些專利、商標、版權或其他智慧財產權。
Pentium 是英特爾公司的商標。
Microsoft Windows 是微軟公司的註冊商標。
本手冊所提到之其他商標,均屬於其合法註冊之公司所有。
版權所有 © 2000-2005 北軟股份有限公司目錄第一章系統概述 (1)系統概觀 (1)系統特點 (1)第二章系統需求 (5)硬體需求 (5)GuardEyes伺服器 (5)GuardEyes Remote Viewer (5)WEB 端 (6)軟體需求 (6)GuardEyes伺服器 (6)GuardEyes Remote Viewer (6)Web 端 (7)推薦顯示卡型號 (7)第三章安裝與啟動 (9)硬體安裝 (9)安裝DS-4001H/HC(I) (9)安裝DS-4004H/HC(I) (10)軟體安裝與啟動 (11)安裝前準備 (11)如何安裝GuardEyes (12)如何安裝GuardEyes播放器 (17)如何移除 GuardEyes (18)如何啟動GuardEyes (18)第四章探查GuardEyes (20)主視窗 (20)控制列 (21)工作區 (22)頻道狀況區 (23)語音控制區 (24)第五章主程式基本作業 (25)視窗模式設定 (25)錄製設定 (26)錄製設定--設定錄製儲存位置 (27)錄製設定--排程 (28)錄製設定--移動錄製設定 (29)錄製設定--使用預設錄製設定 (30)警報設定 (31)警報設定--影像頻道警報設定 (31)警報設定--警報排程設定 (32)警報設定--移動偵測參數設定 (34)警報設定--聯動警報 (36)警報設定--報警主機設定 (37)警報設定--電子郵件警報參數設定 (41)警報設定--電話警報參數設定 (44)警報設定--聲音警報參數設定 (45)備份管理 (46)備份管理--自動備份設定 (46)備份管理--手動備份 (47)系統設定 (48)系統設定--設備管理 (49)系統設定--一般 (51)系統設定--輪跳設定 (53)系統設定--其他 (54)影像播放 (56)影像播放 (56)本地影像播放 (57)多路回放 (58)GEPlayer (59)電子地圖 (61)編輯電子地圖 (62)手動錄製 (64)影像輪跳 (64)系統鎖定 (65)離開系統 (66)影像快照 (66)雲台控制 (68)導入導出系統配置 (69)事件檢視器 (70)使用者連線管理 (71)使用者管理 (72)第六章GuardEyes 進階作業 (75)Web服務 (75)Web 服務--即時瀏覽 (76)Web 服務--多路瀏覽 (78)Web 服務--影像播放 (79)Web 服務--日誌查詢 (80)Web 服務--警報事件查詢 (81)WatchDog (82)WatchDog 設定 (82)語音通訊/監聽 (84)語音通訊/監聽──GuardEyes 伺服器對攝影機語音通訊/監聽 (84)語音通訊/監聽──Web 瀏覽端對 GuardEyes 伺服器語音通訊/監聽 (88)語音通訊/監聽──Web 瀏覽端對攝影機語音通訊/監聽 (88)廣播 (89)第七章 GuardEyes Remote Viewer 操作 (90)系統設定 (90)其他 (91)影像播放 (92)遠端影像播放 (92)語音通訊/監聽 (94)語音通訊/監聽──RemoteViewer 對 GuardEyes 伺服器語音通訊/監聽 (94)語音通訊/監聽──RemoteViewer 系統對遠端攝影機語音通訊/監聽 (95)廣播 (97)第八章關於註冊 (98)Keypro 註冊方法 (98)第九章硬體設備的連接 (100)GuardEyes 5.5H旗艦版硬體接線說明 (100)如何安裝報警I/O 設備 (108)第十章系統安裝使用注意事項 (118)第一章系統概述系統概觀簡單打造數位監控防護網安全的生活、安心的工作GuardEyes旗艦版是全方位智慧型數位中央監控管理系統,具有遠端監看、語音通訊、語音監聽、警報、影像播放、遠端錄影及備份等功能。
Dedal Night Vision Goggles 操作手册说明书

DVS-8Night vision gogglesOPERATION MANUAL Features•Special light-powerful optics•Automatic brightness control•Adjustment of interpupillary distance•Large quantity of chargeable optics (1x,3x,4x,6.6x,9.6x) •IR-on indicator•Low battery indicator•Automatic high-light cutoff•Powerful hazard-free IR illuminator (805 or 940nm) •Weather resistant/proof•Light weightCarefully read the manual before using the night visiondevice!ContentsFeature 2 Appearance of the goggles 4 Short description 5 Specification 5 Contents of Package 7 Batteries installation 9 Operating instructions 9 Storage and maintenance 13 Troubleshooting 13Appearance of the goggles(magnification 1x)1 - Body of the device2 - Objective lens3 - Eyepiece4 - Rubber eyepiece5 – Lens cap6 - Battery compartment7 – Battery cap8 - Infrared illuminator and optical piece9 - On/off switch of the device and of IR illuminator 10 – Head mount fastener 11 – Head mount 12 – Neck cord 13 –Photo receiverShort descriptionYour DVS-8 night vision goggles is a modern Night vision device, meant for a wide range of activities from professional to amateur activity:-night observation,- guarding, search, hunting,- technical provision of law enforcement,- navigational safety of ships.Image intensifier tubes of generation II+, III, XR-5 operating on the principle of multiple increasing of image brightness within visible and near infrared spectrum.SpecificationsGeneralMagnification, x 1.0(3.0*)(4.0**)(6.6***)(9.6***)Field of view, degrees 40(10*)(10**)(6.3***)(4.0****)Objective lensFocus, mm 26(100)(165)(250)Apertureratio 1:1.1(1.2)(1:1.5**)(1:2.0***)(1:2.0****)Focusing from 0.6 m to infinity(from 10 m to infinity**)(from 30 m to infinity***)(from 30 m to infinity****)EyepieceFocus, mm 15Diopter setting +4,-3.5Mechanical characteristicsOverall dimensions, mmlength 172 (260*) (292**) (372***)width 148 (148*) (148**) (148***)height 73 (80*) (80**) (100***)Weight(1x,w/out head-mount),kg 0.42-mod. DVS-8-A,CWeight(1x,w/out head-mount),kg 0.49-mod. DVS-8-DEP_XR-5, DK2, DK3 Weight of head-mount, kg 0.28Weight of helmet mount, kg 0.24Weight of lens for IR illuminator, kg 0.02Weight of3x-magnifier lens, kg 0.24Weight of objective 100mmF/1.5, kg 0.42Weight of objective 165mmF/2.0, kg 0.63Weight of objective 250mmF/2.0, kg 1.40Electric parametersPower source, AA type batteries set 2 pc.Voltage, V 3Continuous operation time, h- in passive mode min. 60- in active mode(with max. IR illuminator) 5Image intensifier tube(Tube type, photocathode sensitivity (µA/Lm), resolution (lp/mm), hole pitchof MCP (µm), screen colour)mod. DVS-8-A Gen.II+, (min.350, min.45, 12.1, -)mod. DVS-8-СGen.II+, (min.540, min.57,-, -)mod. DVS-8-DEP_XR-5 XR-5, (min.700, min. 64,-, -)mod. DVS-8-DK2/g Gen.III, (min.1800, min.57,-, -)mod. DVS-8-DK3/f Gen.III, (min.1800, min.64,-, -)mod. DVS-8-DK3/f/bw Gen.III, (min.1800, min.64, -, black&white)NOTE.In DVS-8-DK2/g device there is installed the tube with input/output construction - glass/glass. In DVS-8-DK3/f there is installed the tube with input/output construction - glass/fiber that provides bigger contrast of supervision in comparison with the device with the tube glass/glass.Infrared illuminatorType IR light diode Power of light radiation, mW 5, 25,75Angle of radiation, degrees 40Angle of radiation with optical piece, degrees 4-10Radiation wave length, Nm 805 or 940Operation conditionsOperation temperatures range, o C -40 до +50 Relative humidity, % 0 to 98* - with 3x magnifier lens** - with 100mmF/1.5 objective lens*** - with 165mmF/2.0 objective lens**** - with 250mmF/2.0 objective lensP.S.1. The screen may have separate black dots or small groups of dots allowed by the technology of tubes’ production at the manufacturing plants.2.Two dark dots can be visible in the withdrawal point of signal light diodes at the field of vision in some positions of eye-glasses.3. Performances and appearance may be improved without prior notification.Contents of PackageDVS-8 device is supplied in the following standard set of articles:- the device with lens of 26mmF/1.1 or 26mmF/1.2 - 1 pc- lens cap - 1 pc- rubber eyepiece guard - 2 pc- operating manual - 1 pc- case - 1 pcAdditional accessories (optional):- optical piece for IR illuminator,- 3x magnifier lens,- DL105 - 100mmF/1.5 objective lens,- DL166 - 165mmF/2.0 objective lens for «DVS-8»(Gen.II+),- DL167 - 165mmF/2.0 objective lens for «DVS-8»(Gen.III),- DL250 - 250mmF/2.0 objective lens,- head mount to fix the goggles on the head (is recommended to buy for the device with magnification 1.0)- helmet mount (is recommended to buy for the device with magnification 1.0),- tripod.Appearance of the goggleson head mount and helmet mountDVS-8 device with 3x magnifier lens and objectives 165mm(magnification 6.6x)DVS-8 device with different objective lensesRigid and semi-rigid case for device DVS-8Batteries installationDVS-8 goggles require two batteries AA type. Be sure they are in good condition and installed per the picture inside battery section (minus end directed inside goggles).In the goggles made with «low battery indicator» the blinking light diode appears in the left side of the image by the voltage fall less than 1.9 V. It indicates the necessity to change the batteries.To replace the batteries it is necessary to unscrew the cap of battery section (7) and replace old batteries with new ones observing polarity.NOTE.To provide the most prolonged time of continuous operation of the device (with one set of batteries) alkaline batteries are recommended to use.Operating instructions1.Remove the lens cap.2.Switch on the scope (position ON of the switch (9). Green light should appear on the screen (the device works in a passive mode).3. Adjust (3) interpupillary distance optimal for you.4. To get a sharp image focus the device through rotating objectives (2) and eyepieces (3).NOTE.Observation and identification range provided by the device depends on the value natural night light, type of the objectiveused, transparency of the atmosphere and contrast between the target and background. The identification range increases in the conditions of good lightning, at moony night given outside illumination if the target is situated on the light background (sand, snow). The identification range decreases in the conditions of weak lightning, low transparency of the atmosphere if the target is situated on the dark background (plough-land, stems of trees, etc.).5.If necessity arises to illuminate the object observed IR illuminator is to be activated by toggle switch (9) (active mode). With toggle switch (9) one of three lighter power positions (5, 25 or 75 mW) can be set.In night vision goggles made with IR on indicator the light diode appears in the right side of the image when IR illuminator is switched on.NOTE.The device with the turned on IR illuminator does not guarantee the hidden observation because luminescence spot of light diode is visible in a red color (if length of wave of IR illumination is 805 nm) and ray of IR illumination can be seen throw other night vision device. If you use IR illumination with length of wave is 940 nm, luminescence spot of light diode is not visible, but IR illumination’s range of vision decreases. According to this length of wave, sensitivity of intensifier falls.6. To provide a more effective reach of IR illuminator auxiliary optical piece is to be set to the IR illuminator.NOTE.It is not allowed to use goggles with lens for IR illumination at adistance closer than 30 meters. If a distance is less, the power ofIR incident is excessive and it can be equal to extra flash of bright spot source of light. It leads to darkening in central part ofdevice’s field of vision. Such darkening cannot be removed.7. To fix the goggles on the head you should use the head mount (11). For secure and comfortable fixation of goggles on the head adjust the head-mount straps. According to figure below push button (1) and put together spectacles and the mechanism along the conductor (2) on the head-mount. Put on the device and the head-mount on your head and select an optimal distance for your eyes moving the scope along the conductor (2). Fix the selected position rotating mechanism (4) clockwise.The head mount mechanism provides a possibility of goggles raising without removing the head mount. For this purpose push (5) and raise the goggles by rotating (6).The removal of the head mount is effected in the inverted sequence.8.To increase the magnification of the device , you can use the optional 3x magnifier lens which provides 3x image magnification.The 3x magnifier lens can be fitted in two ways:- Install 3хmagnifier lens with the turned adapter on the objective lens of DVS-8. This variant is recommended for the fast increase of the magnification;- Leave the adaptor ring off and screw the magnifier lens directly in to the screw thread inside the front of the DVS-8’s objective lens. This is a more secure assembly designed for long term observation.DVS-8 device with 3x magnifier lensTo provide a greater magnification factor of observation the regular objective of 26mm is to be unscrewed with the device in off mode. For this purpose holding the cylindrical body in which the objective is set with one hand turn the objective counter clockwise. Screw 100mm focus objective (magnification 4.0x) or 165mm focus objective (magnification 6.6x) into the released place.The goggleswith the standard objective lens, batteries, optical piece on the IR illuminatorand objective lens 165mmF/2.09. For finishing your work switch off the power toggle switch into OFF position.10. Cover the lens with the cap after completing the goggles operation.11. The neck cord is used for carrying the goggles hanging around the neck.Recommendation.When the device is stored for a long time it is recommended not to leave batteries in the compartment of the device in order to avoid leakage of the batteries.WARNING.1.Humidity may get inside while lens is being replaced. This maylead to optics sweat. In such a case the device must be dried up with the lens removed.2. Operating device must not be pointed at bright light sources:bright lamps, sun, welding light, etc., as this may lead to the device brightness increase factor decreasing.3.To exclude the photo cathode fatigue the device in operation isnot to be left in stationary position more than for 30 min. (duringday light, morning and evening hours)DO NOT FORGET TO SWITCH OFF the device AFTER USE!NOTE.In DVS-8 goggles there was made «automatic high-light cutoff»protection the electronics switch off the device in 20-30 seconds of its operation by bright light, illumination more than 500 Lux.Storage and maintenanceKeep and carry the goggles in closed goggles-case with the lens safely covered with the cap.Protect the device from hits and direct influence of rain, snow and dust on the optical parts.The device should be kept in a warm, dry place far from heating devices, batteries should be taken out. Storage temperature must not exceed 60°C.Troubleshooting...The goggles DVS-8 does not function...Make sure the batteries are in good condition and polarity is correct.The goggles DVS-8 does not focus...Rotate the objective and ocular as the present Manual corresponding section instructs. If the scope would not focus, wipe the optical parts to remove possible humidity on external surfaces of the objective and ocular.The picture diminished or completely disappeared...A bright light source may be the reason of the fact that the picture diminished or completely disappeared. It is the automatic electronic protection of the device. If DVS-8 switches off automatically, set the switch into position OFF. The device is to be ready for use within one-two minutes.Moisture condensation effect on Instrument...In cold weather periods moisture condensation is possible on the outer surfaces of the ocular. In this case it is recommended that the optical surfaces be covered periodically with special anti-sweat liquid.There are some black spots on the screen...Small black spots on the image are allowed. Most black spots are visible only in the daytime but when the device is used in operation mode they are practically invisible.Notes______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________ ______________________________________________________________________________________DEDAL-NVRussia, 107076,18 Stromynka St., MoscowTel: +7(495) 589-31-01, +7(495) 617-05-96, -97 Fax: +7(495) 961-27-49e-mail:**********************。
Webroot Spy Sweeper Enterprise产品说明书

Privacy. Protection. Peace of Mind.Completing the IT Security SolutionWebroot Spy Sweeper EnterpriseCorporations are immersed in a battle with a dangerous security threat that existing fi rewall and antivirus technologies do not suffi ciently address - spyware. Spyware, which includes malware, trackware and adware, describes any program that monitors online activity and secretly transmits information to a third party without end userʼs knowledge. Due to itsstealthy nature, most corporations are more familiar with the symptoms of spyware infection ranging from annoying pop-ups, sluggish network and PC performance to loss of intellectual property, rather than how to prevent spyware from installing in the fi rst place.Spyware programs are becoming more insidious and aggressive everyday. Corporate users can become infected through a variety of methods, often without their knowledge, including visiting websites or installing software applications without fully reading license agreements.Adding an anti-spyware program to your security arsenal is crucial for maintaining optimal system performance and protecting corporate privacy. Spyware programs are generally more complex than viruses, with the ability to deposit hundreds of program traces throughout a PC, making manual removal nearly impossible. Firewalls are not an adequate defense because they lack the ability to discern illegitimate traffi c from legitimate traffi c and do not always block outbound communication. For complete network security protection, in addition to antivirus, fi rewall and perimeter technologies, companies need to incorporate a proactive anti-spyware solution.Webroot Spy Sweeper Enterprise is an award-winning, corporate anti-spyware solution that provides centrally managed, desktop-level spyware protection. Offering the most thorough network-wide detection and elimination of spyware available, Spy Sweeper Enterpriseproactively detects and removes all types of spyware including adware, Trojan horses, system monitors, keystroke loggers, dialers and other potentially unwanted software programs. The illustration below shows how Spy Sweeper Enterprise works in a network environment:Spy Sweeper Enterprise provides distributed spyware management using a client/serverarchitecture. The optional deployment of update distribution servers allow large organizations to balance the load of updating many clients quickly while also allowing multi-site companies to conserve bandwidth by distributing updates from servers located on the same LAN. IT administrators have complete manual control over the system or the ability to confi gure for full autonomous operation.WEBROOT UPDATE SERVERCLIENTCLIENTCLIENT SERVERPollDefinitions & UpdatesStatus, Results & PollConfiguration & UpdatesStatus Sweep NowOn the Record...Two-thirds of IT managers named spyware as the number one threat to their networksʼ security in 2005. In addition, 65 percent said that between the three threats of viruses, phishing, and spyware, their network were least protected from spyware.– Survey by Watchguard An average corporate PC has 17.5 pieces spyware. Every 14.5 out of 100 scans reveals a system monitor, while 9 out of 100 detect a Trojan Horse.– Results from CorporateSpy Audit by Webroot Software Nearly 80% of IT managers claim their organizations have been infi ltrated in the last 12 months by spyware.– Information Week In 2003, it was estimated that one or two out of every 100 support calls made by consumers concerned spyware. Now the estimated number of calls has ballooned to two out of every fi ve.– Brian Burke, IDC analystWebroot Spy Sweeper EnterpriseSpy Sweeper Enterprise Server runs within the network to manage the enterprise clients. The features in the enterprise server are delivered through the followingmajor sub-components:The Admin Console provides a user interface for confi guring clients, managingupdates, establishing alerts, viewing reports, performing real-time scans of remotesystems, and all the other administrative features.The Enterprise Database stores the settings from the admin console. The databasecollects information from spyware sweeps as well as from the update and clientservices. Spy Sweeper Enterprise supports the use of a SQL Server database, orthe pre-packaged database shipped with the product.The Update Service checks the Webroot update server for updates to software orspy defi nitions. This runs automatically on a scheduled basis without requiring userlogin to ensure the latest updates are available. The update service can also beinvoked from the admin console to manually check for updates. If distributed updateservers are deployed, updates are automatically moved to local distribution servers.When a client polls for an update, it obtains a list of local distributors and willretrieve the update from one of the available local servers.The Client Service responds to client polling requests to receive results as well asproviding confi guration settings and updates back to the clients. This componentruns automatically to ensure that clients get the latest settings, software anddefi nitions regardless of when clients are on the network.The Update Distribution Service delivers software and spy defi nitionupdates to clients. This service runs automatically on the Enterprise Server andadditional copies can be installed throughout the enterprise to balance load andminimize WAN bandwidth consumption.Spy Sweeper Enterprise Client runs on the user workstations and laptops to provide desktop-level spyware protection. The client contains three major components deployedin a single installation:The Tray Icon Application provides access to a graphic user interface for end usersto interact with the Spy Sweeper Enterprise service. The client can be deployedinvisibly to end user, visible with user control over specifi c settings or run inadministrative mode with full control for advanced users.The Spy Sweeper Service provides the engine for thorough sweeps of the system anduses proactive shields to protect against spies and their attacks. This componentoperates automatically so that scheduled sweeps or on demand sweeps will run evenwhen users are not logged into the system.The CommAgent Service handles communication with the client service runningon the enterprise server. It checks for confi guration changes or updates as well asdelivers the results from the sweeps.Spyware Detection and ControlSystem administrators and IT staff need the ability to address spyware contamination on multiple workstations from a centralized location. The Admin Console simplifi es control settings for Spy Sweeper Enterprise by enabling IT administrators to set up, manage and monitor settings from a single point.Spy Sweeper Enterprise scans the client system using a constantly evolving database of thousands of known spyware threats. If any fi les or traces of spyware match the defi nitions database, Spy Sweeper Enterprise immediately quarantines the identifi ed threat and notifi es the administrator. Quarantining disables spyware functionality for immediate protection, while giving the administrator the option to review and permanently delete suspect fi les orsafely restore them if they are essential to the operation of desirable applications. Desirable fi les that are detected as suspect can be selected to “always keep” for specifi c users, groups or within the entire enterprise. Additionally, administrators can defi ne accepted applications and block websites throughout the organization, using Spy Sweeper Enterprise to prevent employees from using unwanted software programs or to block access to specifi c Web sites. Client ManagementSchedule Spyware Sweeps• Confi gure specifi c workstation drives to sweep for spyware• Set sweeps to include or exclude memory and the registry• Exclude fi les of a specifi c size from sweeps• Determine spyware disposition by spyware category or by exact spyware name• Enable Active Shields to protect the common spyware entry points, including changes to system memory, registry entries, host fi les, start up processes, browser hijackings and other security settings• “Poll Now” command allows administrator to update workstation confi guration, clientsoftware or spy defi nitions on command• Schedule when to run sweeps by group; or if a critical situation arises, run a sweepinstantly by individual workstation or groupMonitoring, Reporting and Alerts• Confi gure who receives alerts when specifi c types of spyware are detected• View enterprise-wide summaries of spyware detected by group or spyware category• Display errors that occur during sweeps to aid technical support in resolving the problem • Generate reports of alerts and spyware found• Create custom reports if using SQL Server database and crystal reportsPrivacy. Protection. Peace of Mind.2560 55th Street, Boulder, CO 80301Toll Free: 800.870.8102Telephone: 303.442.3813Facsimile:303.442.3846© 2002 - 2005 Webroot Software, Inc. — All rights reserved. No part of this publication may be reproduced, photocopied, stored on a retrieval system, or transmitted without the prior consent of Webroot Software, Inc. Webroot, Spy Sweeper, and Webroot Spy Sweeper Enterprise and their logos are registered trademarks of Webroot Software, Inc.Corporate-wide Security PoliciesTo guarantee the companyʼs network resources are fully protected, it is important that IT administrators defi ne a security policy that is consistent throughout the organization. IT administrators confi gure security options by individual workstation, specifi c groups of users or company-wide. The control settings include:• Continuous monitoring to prevent spyware invasions; proactive protection includessystem shields to prevent spyware from installing on desktops and browser shields protect against redirected web searches, unauthorized favorites list additions and homepage hijackers and more.• The ability to set up workstation groups for administrative purposes, for example, laptop users or geographical regions• Confi guration locations to sweep for spyware, including the registry, memory and drives • Sweep on demand by entire company or specifi c groups of users and view progress of scans as they occur• Quarantine feature disables spyware functionality for immediate protection, while giving the administrator the option to delete or restore the suspect fi le • Disposition options based on specifi c type of spyware such as adware, system monitors and Trojan horses. The administrator can specify whether to always keep or always remove spyware – for example, IT system monitors can be ignored• Manual or automatic deployment of spy defi nition and program updates by user group and update type (such as spy defi nitions, minor update or major update)About Webroot Software, Inc.Webroot Software, a privately held company based in Boulder, Colorado, creates innovative privacy, protection, and performance products and services for millions of users around the world ranging from enterprises, Internet service providers, government agencies, higher education institutions, small businesses and individuals. The company provides a suite of high-quality, easy-to-use software that guides and empowers consumers as they surf the Web, protecting personal information and returning control over computing environments. Webroot software consistently receives top ratings and recommendations by respected third-party media and product reviewers.System RequirementsServer:OS: Windows NT 4.0 SP5 or higher, Windows 2000, Windows XP, Windows Server 2003CPU:200 mHz minimum; 350 mHz or better recommended Memory: 512 MB recommended Disk: 30 MB free disk space for operation. Additional free disk space necessary for database growth. 1 GB free disk space recommended.Client:OS: Windows 98, 98 SE, Me (all require Internet Explorer 6.0 with Service Pack1), 2000, XP, NT 4.0, or 2003CPU: 150 MHz or better recommended Memory: 32 MB RAM minimum; 128 MB RAM or better recommended Disk: 15 MB free disk spaceRemote and Laptop UsersSpy Sweeper Enterprise maintains the enforcement of administrator-set policies for laptop or remote users while they are away from the network. Laptop and remote user machines, when logged into the network, automatically check with the Spy Sweeper Enterprise Server to download new defi nition or product updates and send reports of spyware detected since last logging into the network. Additionally, the remote client sends report information, such as spyware detected and previous sweep date and time, allowing IT administrators to maintain accurate reporting capabilities. While disconnected from the network, laptop and remote users may check the Webroot update server directly so that they continue to receive the most up-to-date protection from spyware threats.。
变形金刚 人物名称 中英文对照
变形金刚人物名称中英文对照Optimus Prime 擎天柱Blaster 录音机Perceptor 感知器Ironhide 铁皮Hound 探长Jazz 爵士Prowl 警车Ratchet 救护车Wheeljack 千斤顶Bluestreak 兰霹雳Mirage 幻影Sideswipe 横炮Trailbreaker 开路先锋Sunstreaker 飞毛腿Grapple 吊车Hoist 滑车Inferno 消防车Red Alert 红色警报Smokescreen 烟幕Tracks 轮胎Skids 刹车Bumblebee 大黄蜂Cliffjumper 飞过山Gears 变速箱Brawn 大汉Beachcomber 巨浪Cosmos 宇宙飞碟Huffer 鲁莽Powerglide 滑翔机Seaspray 浪花Warpath 战戟Windcharger 充电器Skyfire 天火Omega Supreme 大力金刚Grimlock 钢锁Sludge 淤泥Slag 铁渣Swoop 飞标Snarl 嚎叫Superion 大无畏Silverbolt 银剑Slingshot 弹弓Skydive 俯冲Airraid 空袭Fireflight 飞火Defensor 守护神Hot Spot 热点First Aid 急救员Streetwise 大街Blades 刀刃Groove 车辙Elita One 艾丽塔Chromia 克劳莉娅Moonracer 月娇Firestar 火翼星Alpha Trion 钛师傅Defcon 敌无双*S3Rodimus Prime 补天士Ultra Magnus 通天晓Kup 杯子Blurr 罗嗦Arcee 阿尔茜Blaster 录音机Steeljaw 钢钳Ramhorn 犀牛Rewind 发条Eject 喷射Springer 弹簧Sandstorm 沙漠风暴Broadside 排炮Sky Lynx 天猫Metroplex 猛大帅Wreck-Gar 营救车Pipes 管子Tailgate 挡板Outback 腹地Hubcap 的士Wheelie 转轮Hubcap 金飞虫Computron 计算王Scattershot 机关炮Lightspeed 光速Nosecone 钻探机Afterburner 烙铁*S4Fortress Maximus 福特Chromedome 郭文Hardhead 费特Highbrow 海隆Brainstorm 里恩Pointblank 布兰卡Crosshairs 克罗斯Sureshot 沙特Punch-Counterpunch 双面人Fastlane 浪子Cloudraker 腾云Doublecross 双头龙Grotusque 剑齿虎Repugnus 暴乱兽Chase 追捕Freeway 高速Rollbar 路障Searchlight 探照灯Wideload 宽载变形金刚之狂派(霸天虎)*S1、S2Megatron 威震天Starscream 红蜘蛛Thundercracker 惊天雷Skywarp 闹翻天Soundwave 声波Rumble 轰隆隆Frenzy 迷乱Ravage 机器狗Laserbeak 激光鸟Buzzsaw 锯齿鸟Reflector 照相机Bliztwing 闪电Astrotrain 大火车Shrapnel 弹片Kickback 反冲Bombshell 炸弹Thrust 冲锋Dirge 挽歌amjet 喷气机Devastator 大力神Bonecrusher 推土机Hook 吊钩Mixmaster 搅拌机Scavenger 清扫机Scrapper 铲土机Long Haul 拖斗Menasor 飞天虎Motormaster 汽车大师Drag Strip 抢劫Deadend 封锁Breakdown 打击Wildrider 莽撞Bruticus 混天豹Onslaught 袭击Blast Off 爆炸V ortex 旋风Brawl 吵闹Swindle 诈骗Shockwave 震荡波*S3Galvatron 惊破天Cyclonus 狂飙Scourge 瘟疫Soundwave 声波Ratbat 机器蝙蝠Slugfest 剑龙Overkill 角龙Octane 毒气弹Trypticon 铁甲龙Predaking 冲云霄Razorclaw 利爪Divebomb 大鹏Headstrong 铁头Tantrum 野牛Rampage 猛虎Abominus 求雨鬼Hun-Gurrr 龙头魔Blot 龙头妖Cutthroad 龙头精Rippersnapper龙头兽Sinnertwin 龙头怪Runabout 浪客Runamuck 游民*S4Sixshot 六面兽Scorponok 撒克Weirdwolf 人狼Skullcruncher 鳄龙indwipe 蝙蝠魔Apeface 猿猴Snapdragon 狂龙Misfire 火炭Slugslinger 吊索Triggerhappy 扳机Pounce 突击Wingspan 飞翔Battletrap 圈套Flywheels 飞轮============================[MTMTE版]变形金刚人物译名表(中英对照.全)[2007.06.12修订版][注:]深红色的人物名表示该人物的档案已经翻译完成.]【Autobot汽车人】Alphatrion钛师父Beachcomber巨浪Blaster录音机/Eject喷射/Ramhorn犀牛/Rewind发条/Steeljaw钢钳/Slamdance剑舞者(Raindance雨舞/Land Slam陆攻)Blue Streak蓝霹雳Blurr罗嗦Brawn大汉Bumblebee大黄蜂Cliffjumper飞过山Cosmos宇宙飞碟Defcon敌无双(MTMTE里面缺少此人物资料)Gears变速箱Grapple吊车Hound探长Hoist滑车Hot Rod热破/Rodimus Prime补天士Hubcap整流罩Huffer鲁莽Inferno消防车Ironhide铁皮Jazz爵士Jetfire(Skyfire)天火Kup杯子Metroplex猛大帅/Six-Gun猛攻/Slammer班房/Scamper蹦蹦跳Mirage幻影Omega Supreme大力金刚Optimus Prime擎天柱/Roller小滚珠Outback腹地Perceptor感知器Pipes管子Powerglide滑翔机Prowl警车Ramchet救护车Red Alert红色警报Seaspray浪花Sideswipe横炮/Sunstreaker飞毛腿Skids刹车Sky Lynx天猫号Smokescreen烟幕Swerve背离Tailgate挡板Tracks轮胎Trailbreaker开路先锋Ultra Magnus通天晓Warpath战戟Wheelie转轮Wheeljack千斤顶Windcharger充电器Wreck-Gar营救车==============【Female Autobot女汽车人】Arcee阿尔西Chromia克劳莉娅(MTMTE里面缺少此人物资料)Elita One艾丽塔(MTMTE里面缺少此人物资料)Firestar火翼星(MTMTE里面缺少此人物资料)Moonracer月娇(MTMTE里面缺少此人物资料)==============【Dinobot(汽车人)恐龙金刚】Grimlock钢锁/Slag铁渣/Sludge淤泥/Snarl嚎叫/Swoop飞标==============【Throttlebot(汽车人)扼杀战士】Chase追捕/Goldbug金甲虫/Freeway高速路/Rollbar路障/Searchlight探照灯/Wideload宽载==============【Double Spy(汽车人)双重间谍】Punch/Counterpunch出击(反击)==============【The Wreckers(汽车人)回收救援队】Roadbuster路霸/Whirl旋刃============【Jumpstreaker(汽车人)快速反应部队】Topspin上旋/Twin Twist双旋==============【Decepticon霸天虎】Cyclonus狂飙Dirge挽歌/Ramjet喷气机/Trust冲锋Magatron威震天/Galvatron惊破天Scourge瘟疫Shockwave震荡波Soundwave声波/Buzzsaw圆锯鸟/Frenzy迷乱/Laserbeak激光鸟/Overkill暴龙/Ravage机器狗/Ratbat蝙蝠精/Rumble轰隆隆/Slugfest剑龙/Squawkbox罗嗦大王(Beastbox话匣子/Squawktalk娘娘腔)Starscream红蜘蛛/Skywarp闹翻天/Thundercracker惊天雷Trypticon铁甲龙/Brunt冲击/Full-tilt全倾=============【Insecticon(霸天虎)机器昆虫】Bombshell炸弹/Kickback反冲/Shrapnel弹片/Barrage弹幕/Chopshop屠夫/Ransack掠夺/Venom毒液=============【Duocon(霸天虎)二重金刚】Battletrap斗阵/Flywheels飞轮=============【Battale Charger(霸天虎)突击部队】Runabout浪客/Runamuck游民=============【Reflector(霸天虎)照相机三人组】Viewfinder反光镜/Spectro快门/Spyglass闪光灯==============【Trichanger三变金刚】(汽车人)Broadside舷炮/Sandstorm沙暴/Springer弹簧(霸天虎)Astrotrain大火车/Blitzwing闪电/Octane毒气弹=============【Clone克隆战士】(汽车人)Cloudraker腾云/Fastlane浪子(霸天虎)Pounce突击/Wingspan飞翔=============【Combiner合体金刚】(汽车人)Technobots神风队Computron计算王/Afterburner烙铁/Lightspeed光速/Nosecone钻探机/Scattershot激光炮/Strafe 钢鞭Protectbots机器卫兵Defensor守护神/Blades刀刃/First Aid急救员/Groove车辙/Hotspot热点/Streetwise大街Aerialbots飞行太保Superion大无畏/Air Raid空袭/Firelight飞火/Silverbolt银剑/Skydive 俯冲/Slingshot弹弓(霸天虎)Terrorcons龙头部队Abominus求雨鬼/Blot污点/Cutthroat割喉/Hun-Grrr饿龙/Rippersnapper裂齿/Sinnertwin双头龙Combaticons战车队Bruticus混天豹/Blast Off爆炸/Brawl吵闹/Onslaught袭击/Swindle诈骗/Vortex旋风Constructions挖地虎Devastator大力神/Bonecrusher碾压机/Hook吊钩/Long Haul拖斗/Mixmaster搅拌机/Scavenger 清扫机/Scrapper铲土机Stunticons飞虎队Menasor飞天虎/Breakdown打击/Dead End封锁/Drag Strip抢劫/Motormaster汽车大师/Wildrider莽撞Seacons海怪组Piranacon海底狂魔/Nautilator海员/Overbite狂咬/Seawing海翼/Skalor迷津/Snaptrap突陷/Tentakill诱杀Predacons巨狰狞部队Predaking冲云霄/Divebomb大鹏/Headstrong铁头/Rampage猛虎/Razorclaw利爪/Tantrum野牛============【Sixchanger六变金刚】(霸天虎)Sixshot六面兽(汽车人)Quickswitch变色龙============【Univerer宇宙势力】Gatorcons古怪佬(MTMTE里面缺少此人物资料)Quintessons五面怪(MTMTE里面缺少此人物资料)Sharkticons鲨鱼怪Unicron宇宙大帝(MTMTE里面缺少此人物资料)Primus元始天尊(MTMTE里面缺少此人物资料)Primacron至尊太君(MTMTE里面缺少此人物资料)The Fallen堕落金刚(MTMTE里面缺少此人物资料)============【Micromaster微型战士】(汽车人)[Micromaster Rocket Base火箭基地微型战士]Countdown倒计时(汽车人微型战士首领)[Micromaster Base基地微型战士]Groundshaker地震[Micromaster Battle Station战斗岗哨微型战士]Hot House暖房Iron Work铁汉[Micromaster Transport装甲微型战士]Erector建筑工Overload超载[Micromaster Patrol微型战士小队]Hot Rod Patrol暴走老爷车队Big Daddy大腕(队长)/Greaser阔少/Hubs阿飞/Trip-Up刺头Monster Truck Patrol大脚卡车队Hydraulic液压箱(队长)/Big Hauler托运/Heavy Tread大脚/SlowPoke慢半拍Battle Patrol战斗队Big Shot大炮(队长)/Flak轰天雷/Sidetrack侧炮/Sunrunner逐日Air Patrol空中巡逻队Eagle Eye鹰眼(队长)/Blaze Master火烧云/Sky High冲天豹/Tread Bolt空中霹雳Construction Patrol建筑队Takedown拆解(工头)/Crumble粉碎/Groundpounder挖掘机/Neutro泥球Rescue Patrol营救队Fixit救星(队长)/Red Hot火线/Stakeout千里眼/Seawatch海援Race Car Patrol跑车队Road Handler路虎(队长)/Free Wheeler小旋风/Swindler智多星/Tailspin尾旋Off Road Patrol越野队Powertrain动力机车(队长)/Highjump跳涧虎/Mudslinger挡泥板/Tote小霸王(霸天虎)[Micromaster Jet Command Center飞机指挥中心微型战士]Skystalker天行者(霸天虎微型战士首领)[Micromaster Base基地微型战士]Skyhopper鼓上蚤[Micromaster Transport装甲微型战士]Flattop水上飞Roughstuff暴行[Micromaster Battle Station战斗岗哨微型战士]Airwave气浪Greasepit油标[Micromaster Patrol微型战士小队]Race Track Patrol巡路队Barricade没遮拦(队长)/Motorhead动力先锋/Ground Hog旱獭/Roller Force拦路虎Sport Car Patrol赛车队Blackjack胁迫(队长)/Detour绕行/Hyperdrive插翅虎/Road Hugger矮脚虎Military Patrol武装队Bombshock霹雳火(队长)/Dropshot俯射/Growl咆哮/Tracer鬼难缠Air Strike Patrol空袭队Whisper风语者(队长)/Nightflight夜行/Storm Cloud暴风云/Tailwind顺风=============【Micromaster Combiner组合微型战士】(汽车人)[Micromaster Combiner Transport装甲组合微型战士][Missile Launcher Transport导弹发射车] Retro回转/Surge滑绳[Tanker Truck Transport油罐运输车] Gusher喷油井/Pipeline输油管[Micromaster Combiner Battlefield Headquarters战场总部组合微型战士]Overflow冒顶/Full-Barrel满载[Astro Squad航空班]Missile Master导弹大师(班长)/Moonrock月石Barrage倾泻/Heave拖车Blast Master火神炮/Phaser移相器[Metro Squad都市班]Oiler油商(班长)/Slide储油罐Powerrun强行/Strikedown击沉Roadburner火流星/Whelblaze风火轮(霸天虎)[Micromaster Combiner Transport装甲组合微型战士][Cannon Transport加农炮车]Cement-Head水泥头/Terror-Tread巨灵神[Micromaster Combiner Anti-Aircraft Base防空基地组合微型战士]Blackout眩晕/Spaceshot空射[Battle Squad战斗班]Direct-Hit直击(班长)/Power Punch加农炮Vanquish征服/Fireshot火枪Half-Track半履带/Meltdown熔炉[Constructor Squad建工班]Hammer铁锤(班长)/Sledge雪橇Excavator开凿机/Stonecrusher碎石器Grit砂砾/Knockout锄耕机==================【Headmaster头领战士】(汽车人)Brainstorm小诸葛/Arcana阿卡纳Chromedome电脑怪杰/Stylor斯泰勒Fortress Maximus巨无霸/Cerebros塞伯罗斯/Spike斯派克/Cog齿轮(Gasket垫圈/Gromment 索环)Hardhead老顽固/Duros杜罗丝Highbrow海龙/Gort高特Hosehead消防栓/Lug拉格Nightbeat夜巡/Muzzle禁言Siren警笛/Quig贵格(霸天虎)Frangy天狼/Brisko布里斯科Horri-Bull魔牛/Kerb路石Mindwipe蝙蝠魔/V orath沃拉斯Scorponok萨克巨人/Lord Zark扎克领主/Fasttrack紧追Skullcruncher鳄龙/Grax格拉斯Squeezeplay蝰蛇/Lokos洛克斯Weirdwolf狂狼/Monzo蒙佐=======================【Headmaster Horrorcon(霸天虎)三变头领战士】Apeface猿面/Spasma痉挛Snapdragon狂龙/Krunk克伦科=======================【Action Master行动战士】(汽车人)Jackpot赌注/Sights乌鸦Kick Off踢飞/Turbo-Pack涡轮包Mainframe主机/Push-Button按钮机器人Over-Run蔓延/Attack Coptor攻击直升机Rad瑞德/Lionizer机器狮子Rollout突破/Glitch扰波器Skyfall空降/Top-Heavy角犀Sprocket链齿/Attack Cruiser攻击吉普(霸天虎)Axer利斧/Turbo Cycle涡轮摩托Banzai-Tron立地太岁/Razor-Sharp利齿蟹Gutcruncher搅碎机/Stratotronic Jet超音速战斗机Krok虎睛/Gatoraider鳄鱼Treadshot跳射/Catgut雌狮========================【Firecon(霸天虎)火焰金刚】Cindersaur灰烬Flamefeather烈焰Sparktalker火苗===============【Sparkbot(汽车人)火花战士】Fizzle闪灭Guzzzle闪耀Sizzle闪现===============【Monsterbot(汽车人)野兽组】Doublecross双头翼龙Grotusque翼虎Repugnus异形===============【Ominbot(汽车人)全向车部队】Camshaft轮轴Downshit摘档Overdrive超速===============【Targetmaster先锋战士】(汽车人)Blurr罗嗦/Haywire乱线头Crosshairs瞄准器/Pinpointer准星Hot Rod热破/Firebolt霹雳Kup杯子/Recoil后座力Landfill掩埋/Silencersilencer消音器/Flintlock燧石枪Pointblank直射/Peacemaker和事佬Quickmix速混/Ricochet跳弹/Boomer临时工Scoop挖掘机/Tracer曳光弹/Holepunch打孔机Sureshot神枪手/Spoilsport扫兴(霸天虎)Cyclonus狂飙/Nightstick警棍Misfire死火/Aimless散漫Needlenose小心眼/Sunbeam日光/Zigzag月读Quake地震/Tiptop顶点/Herter赫尔特Scourge瘟疫/Fracas喧哗Slugslinger火炭/Caliburst半兽人Spinister刺蛇/Singe刺痛/Hairsplitter挑刺Triggerhappy扳机/Blowpipe吹管===============【Triggerbot扳机战士】(汽车人)Dogfight激斗Override飞跃Backstreet后街(霸天虎)Crankcase曲轴箱Ruckus骚动Windsweeper扫风===============【Powermaster能量战士】(汽车人)Gataway跑路/Rev转速Joyride兜风/Hotwire热线Slapdash急先锋/Lube润滑油(霸天虎)Darkwing黑翼/Throttle扼杀Dreadwind阴风/Hi-Test鬼火(两面派)Doubledealer无间行者/(汽车人)Knok刚/(霸天虎)Skar宿=============================【Pretender隐者战士】(汽车人)Landmine地雷Catilla虎符Chainclaw大熊Cloudburst豪雨Crossblades十字刀Doubleheader双头佛Groundbreaker草上飞Gunrunner军火Longtooth长牙Pincher蝎钳Sky High摸着天Sky hammer天锤Splashdown溅落Vroom呜隆隆Waverider踏浪(霸天虎)Skullgrin骨裂Bludgeon雷震Bomb-Burst爆弹Bugly臭虫Carnivac饿狼Finback长须鲸Iguanus角蜥Octopunch八爪鱼Roadblock路栅Roadgrabber拦路匪Snarler狂嚎Stranglehold窒息Submarauder水贼Thunderwing雷翼========【Printender Monster(霸天虎)隐者怪兽组】Birdbrain秃鹫Bristleback豪猪Icepick飞猿Scowl怒嚎Slog蹒跚Wildfly石像鬼Monstructor巨魔兽===========Mini-Spies迷你间谍===========Powerdashers冲锋队其他人物汽车人:Bumper缓冲器Backbeat节拍Gizmo小灵通霸天虎:Sunstorm太阳风。
Synopsys VC SpyGlass 数据手册说明书

DATASHEET OverviewAmong the many verification challenges confronting system-on-chip (SoC) designers today, clock domain crossings (CDC) ranks near the top in difficulty. Today’s SoCs have dozens, sometimes even hundreds, of asynchronous clock domains, making it very difficult to verify using conventional simulation or static timing analysis (STA). RTL simulation is not designed to verify metastability effects, which lead to data transfer issues across asynchronous clock boundaries. STA tools also do not address asynchronous clock domain issues.IntroductionWith increasing complexity and growing chip sizes, achieving predictable design closure is a challenge, and recently CDC issues have become a leading cause of design errors. Such errors can add significant time and expense to the design-and-debug cycle and may even find their way into silicon, necessitating costly re-spins. VC SpyGlass™ provides a comprehensive methodology with scalable capacity for quality signoff with high debug productivity.Smarter and fasterlow noise clockdomain crossing verificationVC SpyGlass CDCCDC BugsThe success of static CDC verification tools is determined by two critical measures—the time taken to signoff the RTL and the completeness of CDC verification. Conventional CDC analysis tools fall short in both areas. They generate large amounts of noise (false violations), extending the verification cycle, and provide inadequate coverage on various types of CDC issues. Figure 2 describes the class of bugs/scenarios, which, if not verified correctly, can cause design re-spins. These bugs can be structural as well as functional in nature.Figure 2: Typical CDC bug examplesVC SpyGlass CDC VerificationSynopsys’ VC SpyGlass CDC architecture is based on six key challenges of scalable CDC verification (see Figure 3).Figure 3: Scalable CDC platform addressing biggest challenges2Ease of Use and Functionality• Utilizing existing SpyGlass SDC Constraints from current projects provides simple setup by automatically extracting the clock, reset and clock domains information• Signoff quality using comprehensive structural and functional CDC analysis using formal and simulation based solutions• Protocol-independent analysis, recognition of the broadest variety of synchronizers and auto-detection of quasi-static signals resulting in the lowest number of false violations• Highest performance to achieve faster signoff and support very large designs• Native support for UPF and SDC based CDC analysis• Low noise with machine learning based Root Cause Analysis (RCA)• Intuitive debug with native Verdi® integration for highest performance and CDC centric debug capabilities• Hierarchical flows for fast turnaround using signoff abstract model• Consistency with DesignCompiler® and PrimeTime® use modelsSolving Problems at the RTL and Netlist LevelVC SpyGlass CDC provides an easy-to-use and comprehensive guide for solving CDC problems at the RTL and gate-level netlist to avoid costly re-spins.• Methodology documentation and rule-tags integrated for direct use• User-guided CDC methodology results in fewer, more meaningful violations, saving time for the RTL designer• Reuse the PrimeTime® setup for netlist CDC analysis• Guided steps for completing analysis of CDC problems at block-level as well as chip-level–Design setup, setup checks, design-unit integration, chip-level CDC verification, report review, and CDC verification signoff Separating True from False ViolationsIsolating real clock domain crossing issues requires detection of various synchronization schemes, not just basic two-flop or multi-flop synchronizers, and performing comprehensive protocol-independent analysis. As part of the protocol-independent analysis, VC SpyGlass CDC correlates control and data signals resulting in a good understanding of the design intent. It also detects the list of potential quasi-static signals allowing users to review the auto-generated list and use them as part of the setup. This correlation helps to produce CDC analysis with the lowest possible noise.VC SpyGlass CDC has integrated structural and functional CDC analysis. Users make use of formal based functional CDC analysisto verify CDC protocols. Users also have the flexibility to generate System Verilog Assertions (SVA) to verify CDC protocols and assumptions made for structural analysis.VC SpyGlass CDC also provides a signoff-quality hierarchical signoff abstract model SoC flow to perform CDC analysis for huge SoCs. This hierarchical flow helps users to use a divide-and-conquer approach to achieve the highest productivity and quickest turnaround time.For more information about VC SpyGlass CDC and the rest of the VC SpyGlass RTL Signoff platform, visit or contact your local sales representative.©2020 Synopsys, Inc. All rights reserved. Synopsys is a trademark of Synopsys, Inc. in the United States and other countries. A list of Synopsys trademarks isavailable at /copyright.html . All other names mentioned herein are trademarks or registered trademarks of their respective owners.02/21/20.CS449309154_VC SpyGlass CDC_DS.。
Spyker BCS25 25lb Bag Spreader 产品说明书

1
20 1019476 Combination Gear
1
21 1019597
Screw; Thread Forming, M4 x 10
1
22 1019478 Cotter Pin, 4 mm
1
23 1020071 Nut, M8 x 1.25
2
24 1020064 Shoulder Pad *
1
* not illustrated
19
Additional parts in the box:
17 1019498 Broadcast Shield
1
18 1019504 Handle Assembly
1
19 1019505 Bag Support Rod
1
16
7
7
14 12
20
7 13 12
Operator's Manual
BCS25 - 25lb Bag Spreader
Spyker Spreaders
Contact us at 800.972.6130
! ! IMPORTANT This manual contains information for the safety of persons and property.
Read it carefully before assembly and operation of the equipment!
English Manual
Page 1
1019501-B
Table of Contents + Safety
Table of Contents
Safety ������������������������������������������ 2 Parts ��������������������������������������������������� 3 Assembly ������������������������������������ 4 Use and Care ��������������������������� 5-7
Tobii Dynavox PCEye Plus 用户手册说明书

Tobii Dynavox PCEye Plus 用户手册用户手册Tobii Dynavox PCEye Plus版本1.306/2017版权所有。
Copyright©Tobii AB(publ)未经出版人事先书面许可,对本出版物的任何部分不得进行复制、保存于可检索系统内,也不得以任何形式或任何途径(如电子形式、复印、录制等)传播。
所主张的版权保护包括依成文法或司法规定而受版权保护的材料和信息的所有形式和事项,包括但不限于屏幕(如屏幕显示)、菜单等显示的软件程序生成的材料。
本文档中所含信息由Tobii Dynavox专有。
未经Tobii Dynavox事先书面授权,禁止复制任何部分或全部内容。
本文档内提及的产品是其相应所有者的商标和/或注册商标。
出版商和作者不对这些商标主张权利。
尽管在本文档的编写过程中采取了各种防范措施,但出版商和作者对本文档的任何错误或遗漏概不负责,对由于使用本文档所含信息或由于使用本文档随附的程序或源代码而引致的任何损失也概不负责。
无论在何种情况下,出版商和作者对本文档直接或间接导致的实际或指称的任何利润损失或其他商业损失一概无须负责。
内容若有更改,恕不另行通知。
请访问Tobii Dynavox网站查看本文档的更新版本。
PCEye Plus受以下美国专利保护:●7.572.008● 6.659.611目录内容1介绍 (4)1.1关于警示语的说明 (4)1.2预期用途 (4)1.3包装内容 (5)2安全性 (6)2.1安装警告 (6)2.2癫痫警告 (6)2.3红外警告 (6)2.4磁场警告 (6)2.5儿童安全 (6)2.6请勿打开PCEye Plus (6)2.7紧急情况 (6)2.8Windows Control (7)2.9第三方 (7)3PCEye Plus入门 (8)3.1系统要求: (8)3.2概览 (8)4使用PCEye Plus (9)4.1用户位置调整 (9)5设置 (10)5.1麦克风设置 (10)5.2外置按钮设置 (10)5.3设置Windows Hello (10)6适用应用程序软件 (11)7产品保养 (12)7.1温度和湿度 (12)7.1.1一般用途 (12)7.1.2运输和储存 (12)7.2清洁 (12)7.3PCEye Plus的运输 (12)7.4PCEye Plus的处置 (12)附录A支持和保修 (13)A1客户支持中心 (13)A2保修 (13)附录B合规信息 (14)B1联邦通讯委员会(FCC)声明 (14)B2加拿大工业部声明 (14)B3CE声明 (14)B4标准 (14)附录C技术规格 (15)1介绍感谢您选购Tobii Dynavox公司的PCEye Plus设备!为确保获得此产品的最佳性能,请仔细阅读本手册。
spyglass中文使用说明
望远镜用户指南概览 (5)关于本指南望远镜概观按钮手势最多显示头---(HUD)的工具和手段入门 (17)版本和功能硬件和软件兼容性说明 (17)启用定位服务设置最多望远镜开始标记和跟踪对象 (22)ViewVinder (23)设置颜色设置最多的HUD快速切换HUD的操作模式缩放指南针 (28)校准增强现实和三维罗盘 (29)寻找目标对象设置最多罗盘罗盘定位模式 (32)罗经 (34)开始使用罗经 (34)确定启动轴承 (35)漂移和调整全球定位系统 (37)设置最多的GPS获取GPS数据设置单位查找 (39)概观按钮快速目标标记添加目标管理目标寻找和跟踪在地图上观测地点的目标 (47)跟踪 (48)设置跟踪跟踪指南针寻找目标对象 (51)星 (51)设置的恒星寻找和跟踪由太阳,月亮,宝来和星导航 (52)地图 (53)设置最高的地图平移和滚动缩放RangeVinder (54)测量距离与光RangeVinder (55)六分仪 (55)用六分仪测角三角洲 (55)角计算器 (56)设置最多计算器计算对象的距离 (57)计算对象的尺寸 (57)从六分仪获取角三角洲 (57)获取对象的距离与地图 (58)斜 (59)相机 (59)精度和准确度 (60)提示 (60)测量地图点之间的距离 (60)故障排除 (60) (61)一览关于本指南本指南描述的功能:•望远镜3.3•指挥官指南针3.3•指挥官指南针精简版3.3所有软件的导航产品以上属于望远镜系列。
本指南范围内的所有产品将被简称为望远镜。
PDF及EPUB在我们本手册PDF和EPUB格式可供下载网站-访手册,并同步到您的设备。
望远镜有了望远镜3D增强现实导航和先进的军用规格的指南针,你可以标记,VIND和实时跟踪-多个地点,轴承,太阳,月亮,星星和使用它作为一喜-高科技viewVinder,罗经,光学rangeVinder,视觉六分仪,地图,全球定位系统,角计算器,倾角和变焦相机。
图文详解KeePass使用教程

图文详解KeePass使用教程KeePass Password Safe(以下简称KeePass)是一套类似数据库管理的密码管理软件,通过密码和密钥,它能够提供一个足够安全的密码存储空间。
只要你记住这一个管理密码,妥善保管好密钥文件和数据库文件,基本上可以安枕无忧了。
同时KeePass也有强大的密码生成功能,绝对比你自己想的要安全。
它的操作方式也极为简单,没有复杂的步骤。
一:下载及安装站长百科下载站最新版下载地址:/download/KeePass–1257.html,下载安装包解压后双击安装文件根据安装向导就可以安装。
选择I accept意思也就是我同意,然后next(下一步),根据提示继续next就可以安装成功。
软件是英文的,安装好之后我们看到界面仍旧都是英文的,我们可以去/translations.html,中下载简体中文插件复制放到安装目录下,运行软件“KeePass”,点击“View”菜单中“Change Language”命令,选择“简体中文”重新启动程序即可。
二:使用软件经过上面的步骤,我们返回到桌面双击keepass的快捷键,就可以看到软件的语言已经变成中文的了这样就可以方便我们的使用了。
如果是第一次使用,我们首先的是要创建数据库,也就是存放密码的数据库,KeePass将会把你的所有密码存储在这个数据库中。
单击菜单上的“文件—新建”,选择数据库存放的路径选择一个路径来保存我们的数据库,然后点击保存,这里需要填入数据库管理密码,并要确认密码,我们同时要勾选上密匙文件,并选择密钥的保存位置(可以选择不用密钥)。
这样将来在开启数据库时就要“主密码”和“密钥文件”同时具备才行。
输入完毕后点击“确定”然后点击创建鼠标在黑色区域划过生成的密码位数在下方可以很清楚的看到,然后点击确定在这里描述或者不描述都可以,点击确定后就进入主窗口并可以看到一条示例记录,点击示例记录在下方可以看到网址和密码并且也创建时间。
Webroot Spy Sweeper Enterprise商品说明书

Completing the IT Security SolutionWebroot Spy Sweeper Enterprise is an award-winning, enterprise anti-spyware solution that provides centrally managed, desktop-level spyware protection. Offering the most thorough network-wide detection, removal and blocking of spyware available, Spy Sweeper Enterprise provides distributed spyware management using a client/server architecture. The optional deployment of distribution servers allow large organizations to balance the load of updating many clients quickly while also conserving the bandwidth of multi-site companies by distributing updates from servers located on the same LAN. Administrators have complete manual control over the system or the ability to configure for full autonomous operation.The illustration below shows how Spy Sweeper Enterprise works in a network environment:Comprehensive Removal TechnologyThe Webroot Comprehensive Removal Technology (CRT) is the backbone behind the most advanced spyware removal engine in the industry. CRT uses adaptive recognition practices to remove processes, applications or files that may have changed during the remediation process or may not have been previously detected. This unique technology completely disables spyware programs detected on a system PC and sends them to quarantine, rendering them ineffective. Using CRT, Spy Sweeper Enterprise assures system stability during and after the spyware removal process.Spy Sweeper Enterprise scans the client system using a constantly evolving database of hundreds of thousands of known spyware threats. If any files or traces of spyware match the definitions database, Spy Sweeper Enterprise immediately quarantines the identified threat and notifies the administrator. Quarantining disables spyware functionality for immediate protection, while giving the administrator the option to review and permanently delete suspect files or safely restore them if they are essential to the operation of desirable applications. Desirable files that were sent to quarantine can be selected to “Always Keep” for specific users, groups or the entire enterprise.Webroot has combined its deep knowledge of spyware with years of research and development to create the most flexible, accurate and technically evolved detection, removal and blocking engine in the industry.With increased capabilities, including the detection and removal of rootkit masked spyware, Spy Sweeper Enterprise removes and blocks the most persistent and powerful spyware programs today.Malicious spyware programs can block certain windows API’s in order to prevent removal from the operating system. To effectively remove these threats, Spy Sweeper Enterprise introduces kernel-level driver protection that allows for the deletion of files (locked or otherwise) directly off of the hard disk, bypassing the Windows system API’s that are normally used to manage disk operations.Advanced Proactive ProtectionSpy Sweeper Enterprise provides Smart Shields that block spyware from installing and protects specific elements of the system that spyware attacks. The Startup, Spy Installation, Memory, Alternate Data Stream (ADS), ActiveX and Browser Helper Object (BHO) Shields block spyware before it can infect a protected workstation.■The Startup Shield blocks spyware programs fromwriting critical registry keys for their operations.This shield is configurable to allow approvedprograms to be installed.■The Spy Installation Shield detects spy processes tryingto start and immediately terminates them. It also allowsan administrator to block any unwanted executable (i.e.to stop unwanted game playing on the enterprisenetwork) in addition to blocking spyware.■The Memory Shield scans memory to catch spies thatare currently loaded and terminates those processes.■The Alternate Data Stream Shield prevents spies fromexecuting from an alternate data stream. CoolWebSearchis known to exploit this vulnerability.■The ActiveX Shield prevents the installation of anyActiveX components. This shield is configurable toallow for the installation of valid ActiveX components that ■The Spy Communication Shield blocks incoming and outgoing communication to malicious Web sites known to host potential spyware threats. This blocked list of URLs is updated via Webroot’s daily definition releases.■The BHO Shieldstops the installation of unwantedtoolbars that track Web site activities or install otheradd-ons without your consent. This shield is configurableto allow for the installation of valid BHOs that anadministrator approves.Additional Smart Shields in Spy Sweeper Enterprise defend critical areas from spyware attacks:■The IE Trusted Sites Shield prevents spyware frommodifying Internet Explorer’s security zones settings.■The Messenger Shield prevents spyware from exploitingthe Windows Messenger service.■The Hosts File Shield protects the hosts file frommodifications by spyware.■The IE Hijack Shield protects internal pages of InternetExplorer from spyware attacks.■The Favorites Shield prevents spyware from addingunwanted favorites.■The Home Page Shield protects the user’s current homepage or allows administrators to specify a corporate homepage standard.■The Common Ad Sites/Blocked Web Sites Shieldprevents access to sites that are known to deliver spywareor advertisements from spyware. This list is updated inevery definition file. Users also have the ability to addcustom sites they wish to block.Advanced Spyware Detection and ControlThe Spy Sweeper Enterprise Server runs within the network to manage the enterprise clients. The features of the Enterprise Server are described below:The Admin Console is Web-based and enables multiple simultaneous administrators with full audit logging of all user actions. The Admin Console is accessible from any Internet connected PC and provides the interface for configuring clients, managing updates, establishing alerts, viewing reports, and performing real-time scans of remote systems.The Database stores the settings from the Admin Console. The database collects information from spyware sweeps as well as from the update and client services. Spy Sweeper Enterprise supports the use of a MS SQL Server (2000 and 2005) or MS SQL Server Express 2005 database.The Update Service checks the Webroot Update Server for updates to software or threat definitions. This runs automatically on a scheduled basis without requiring any user interaction to ensure the latest updates are available. The update service can also be invoked from the Admin Console to manually check for updates. If distributed update servers are deployed, updates are automatically moved to local distribution servers. When a client polls for an update, it obtains a list of local distributors and will retrieve the update from one of the available local distributor servers.The Client Service responds to client polling requests to receive results as well as to provide configuration settings and updates back to the clients. This component runs automatically to ensure that clients get the latest settings, software and definitions regardless of when clients are on the network.The Webroot Update Distribution Service delivers software and threat definition updates to clients. This service runs on any Distributor Servers that may be installed throughout the enterprise to balance load and minimize WAN bandwidth consumption.The Spy Sweeper Enterprise Client runs on user workstations and laptops. The client contains three major components deployed in a single installation:The Spy Sweeper Enterprise User Interface provides access to a graphical user interface for end users to interact with the Spy Sweeper Enterprise service. The client can be deployed invisibly to end users, and provides user control over specific settings or runs in administrative mode with full control for advanced users.The Spy Sweeper Service does thorough sweeps of the system and uses proactive shields to protect against spies and their attacks. This component operates automatically so that scheduled sweeps or on-demand sweeps will run even when users are not logged into the system.The CommAgent Service handles communication with the Client Service running on the Enterprise Server. Itchecksforconfiguration changes or updates as well as delivers client sweep results back to the server.Client Management Remote and Laptop UsersSpy Sweeper Enterprise maintains the enforcement of administrator-set policies for laptop and remote users while they are away from the network. When logged into the network, laptop and remote user machines automatically check with the Spy Sweeper Enterprise Server to download new definitions or product updates and send reports of spyware detected since last logging into the network. Additionally, the remote client sends report information, such as spyware detected and previous sweep date and time, which allows IT administrators to maintain accurate reporting capabilities. While disconnected from the network, laptop and remote users may be configured to check the Webroot Update Server directly so that they continue to receive the most up-to-date protection from spyware threats.Schedule Spyware Sweeps ■ Configure specific workstation drives to sweep for spyware ■ Set sweeps to include or exclude memory and the registry ■ Exclude files of a specific size from sweeps ■ Determine spyware disposition by spyware category or by exact spyware name ■ Enable Smart Shields to protect the common spyware entry points, including changes to system memory, registry entries, host files, startup processes, browser hijackings, alternate data streams and other security settings ■ “Poll Now” command allows administrator to update workstation configuration, client software or spy definitions on demand ■ Schedule sweeps by group; or if a critical situation arises, run a sweep instantly by individual workstation or group© 2006 Webroot Software, Inc. — All rights reserved. No part of this publication may be reproduced, photocopied, stored on a retrieval system, or transmitted without the prior consent of ■Client reboot notifications help with the full removal of persistent threats by prompting the end user to rebootif necessary to completely remove a detected threat■Incremental Definitions allow organizations to download only the new or updated definitions from Webroot, significantly reducing the size of the definition packetsthat need to cross the network■Memory Sandboxing permits compressed executables to unpack and execute in a protected memory space where they may be scanned and quarantined without compromising the integrity of theclient workstation Monitoring, Reporting and Alerts ■ Configure who receives alerts when specific types of spyware are detected ■ SNMP alerting for detected spyware at conclusion of sweeps ■ View enterprise-wide graphical summaries of spyware detected by group or spyware category ■ Display errors that occur during sweeps to aid technical support in resolving the problem ■ Generate reports of alerts and spyware found ■ Create custom reports if using SQL Server database and Crystal ReportsSystem Requirements Server:OS: Windows 2000 Pro/Server with SP4, Windows XP Pro with SP2, Windows 2003 Standard, Enterprise or SMB with SP1CPU: 1 GHz Minimum Memory: 1 GB Minimum Disk Space: 1 GB MinimumDB Support: Microsoft SQL Server 2005 Express (.NET 2.0, MDAC 2.8+), Microsoft SQL Server2000 and 2005IE:6.0 SP1 or laterClient:OS: Windows 2000 Pro/Server, Windows XP Home, Professional, Tablet, Windows 2003 Standard, Enterprise or SMB CPU: 1 GHz MinimumMemory: 128 Minimum, 256 MB or better recommended Disk Space: 15 MB free space。
spy++中文教程
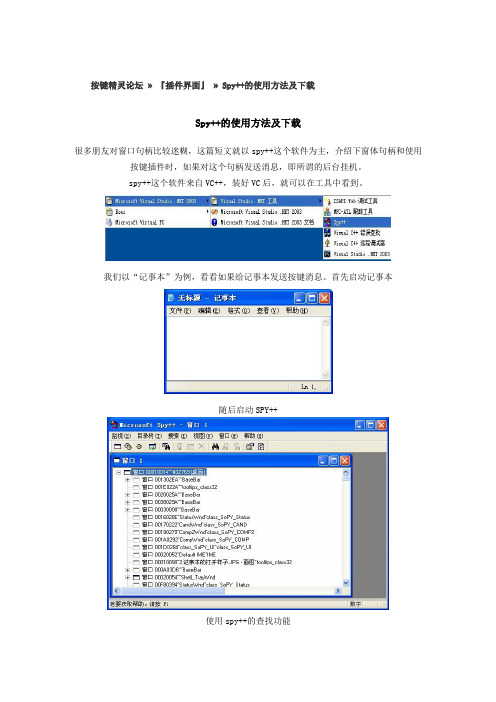
注册登录按键精灵论坛» 『插件界面』» Spy++的使用方法及下载Spy++的使用方法及下载很多朋友对窗口句柄比较迷糊,这篇短文就以spy++这个软件为主,介绍下窗体句柄和使用按键插件时,如果对这个句柄发送消息,即所谓的后台挂机。
spy++这个软件来自VC++,装好VC后,就可以在工具中看到。
我们以“记事本”为例,看看如果给记事本发送按键消息。
首先启动记事本随后启动SPY++使用spy++的查找功能点开后的效果我们把黑色准星拖动到记事本窗体上然后点击“确定”,看到了SPY++已经显示了下图红色的内容。
这三个句柄从上到下依次是:记事本的主句柄,文字输入框的句柄,状态栏的句柄我们要给记事本发送按键消息,就要选对发送对象(句柄),这里显然,我们要发送给“文字输入框”。
我们双击“文字输入框”这里,可以看到“窗口标题”、“窗口大小”、“窗口位置”等信息。
点击“类”选项卡,查看下类名是什么,代码里需要类名做参数好了,基本的数据都有了,下面给出的代码://打开记事本VBSCall RunApp("notepad.exe")1.//等待记事本完全打开2.Delay 1003.//得到当前窗口句柄4.dim hwnd5.Plugin hwnd=Window.Foreground()6.//查找当前窗口下的子句柄7.dim edithwnd8.Plugin edithwnd=Window.FindEx(hwnd,0,"Edit",0)9.//发送字符串消息10.Plugin Window.SendString(edithwnd, "看我发送字符串消息")11.//发送回车12.Plugin Window.SendKeyDown(edithwnd,13)13.//发送键盘消息14.Plugin Window.SendKeyDown(edithwnd,asc("1"))。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
望远镜用户指南概览 (5)关于本指南望远镜概观按钮手势最多显示头---(HUD)的工具和手段入门 (17)版本和功能硬件和软件兼容性说明 (17)启用定位服务设置最多望远镜开始标记和跟踪对象 (22)ViewVinder (23)设置颜色设置最多的HUD快速切换HUD的操作模式缩放指南针 (28)校准增强现实和三维罗盘 (29)寻找目标对象设置最多罗盘罗盘定位模式 (32)罗经 (34)开始使用罗经 (34)确定启动轴承 (35)漂移和调整全球定位系统 (37)设置最多的GPS获取GPS数据设置单位查找 (39)概观按钮快速目标标记添加目标管理目标寻找和跟踪在地图上观测地点的目标 (47)跟踪 (48)设置跟踪跟踪指南针寻找目标对象 (51)星 (51)设置的恒星寻找和跟踪由太阳,月亮,宝来和星导航 (52)地图 (53)设置最高的地图平移和滚动缩放RangeVinder (54)测量距离与光RangeVinder (55)六分仪 (55)用六分仪测角三角洲 (55)角计算器 (56)设置最多计算器计算对象的距离 (57)计算对象的尺寸 (57)从六分仪获取角三角洲 (57)获取对象的距离与地图 (58)斜 (59)相机 (59)精度和准确度 (60)提示 (60)测量地图点之间的距离 (60)故障排除 (60)F.A.Q (61)一览关于本指南本指南描述的功能:•望远镜3.3•指挥官指南针3.3•指挥官指南针精简版3.3所有软件的导航产品以上属于望远镜系列。
本指南范围内的所有产品将被简称为望远镜。
PDF及EPUB在我们本手册PDF和EPUB格式可供下载网站-访手册,并同步到您的设备。
望远镜有了望远镜3D增强现实导航和先进的军用规格的指南针,你可以标记,VIND和实时跟踪-多个地点,轴承,太阳,月亮,星星和使用它作为一喜-高科技viewVinder,罗经,光学rangeVinder,视觉六分仪,地图,全球定位系统,角计算器,倾角和变焦相机。
望远镜作为一个有用的工具来解决产生期间参观的地方,像汽车后Vinding以及在狩猎营地或酒店,Vishing,登山,侦察,航海,体育户外活动,从标签所有类型的任务范围和巡回演出。
望远镜的设计与真正的美国军用标准设备的热情,是基于一个想法,创建一个工具,类似常用的科幻viewVinders -六,军事和动作电影。
概观最多显示头---(HUD)的你的头 - 抬头显示(HUD)的可能看起来不同,取决于底层的传感器硬件,望远镜版,你是否已经改变其设置。
按钮几个按钮提供了方便的望远镜的主要特点。
六分仪一旦点选六分仪按钮设置出发轴承,直观地测量现场图片,从两个轴承之间,两点之间的角度的角度相机或角度的两个设备之间的态度。
点击六分仪第二次按钮,设置结束的轴承,并完成测量。
当设置的起始和结束的轴承计算器按钮显示和增强现实标记的出发和结束轴承与测量三角洲角的更新。
点击六分仪第三次,以清除所选轴承和隐藏计算器按钮按钮。
Calculator计算器按钮,打开角计算器工具,传递有由六分仪工具测量角度。
这些参数时,只有两个被称为角计算器工具可以计算距离,角度和大小的物体。
Zoom In and Zoom Out拍打在放大或缩小出的的按钮magniVies 或miniVies 要么现场照片从相机或哪一个是积极的地图。
相应的缩放级别也适用于增强现实对象的映射和HUD 的测量尺度。
Locator点选定位器按钮,从当前的位置或在地图切换手当前的实际位置,按照目前的GPS 传感器读数的地图的坐标手动设置当前坐标。
定位器按钮后,会出现平移地图或手工设置的位置。
Camer轻按相机键,你是否需要采取HUD 的叠加图片,或只是为了截图。
使截图的另一种方法是使用设备的主按钮和设备的电源按钮同时按下组合。
Tracker追踪“按钮,打开”目的地“菜单提供了访问,以先进的目标管理,并允许快速增加或标记当前位置,目前的轴承或作为跟踪目标位置的地图。
通过目的地“菜单中添加目标自动小学。
Info点击“信息”按钮访问的应用程序设置和加速度计的校准。
Gestures一个平视显示器屏幕上的任何地方内的几个手势,很容易地将应用程序功能打开或关闭,调整方位,罗盘模式,并通过现有的HUD颜色和Vilters的周期之间的开关。
Double Tap枪王手势打开快速切换菜单。
快速切换菜单允许快速和容易的切换相机,地图或指南针模式或关闭。
Long Tap龙塔手势打开目前的态度,提供复制选项的菜单。
根据目前的态度“菜单中,你可以复制当前轴承,当前位置的坐标,或在当前位置的链接。
Pinch Zoom捏缩放手势放大或缩小,从现场图片,以及增强现实对象映射和所有依赖HUD的尺度和光罩相机提供了快速简便的方法。
Vertical Swipe通过的颜色Vilters或镜头垂直轻扫手势周期来回覆盖,无论是从相机,地图或默认屏幕背景的现场图片。
当有需要得到更好的对比度之间的HUD和位于下方或以防万一你想建立您所选择的配色方案,是有用的ViltersHorizontal Swipe水平刷卡通过HUD元素可用的颜色姿态周期。
HUD的颜色是必不可少的,当你需要创建一个配色方案,你喜欢或需要一个更好的平视显示器对比的情况下。
Diagonal Swipe对角线刷卡可能HUD的背景类型的手势周期。
HUD的背景是透明的,并有权根据HUD元素,并绘制了色彩Vilters层。
Two-Finger Horizontal Swipe两手指横向轻扫手势是用来调整或纠正当前方位的价值时,在罗经或手动定位模式运作。
它的工作原理,以同样的方式,航空陀螺罗盘的行为。
最多显示头---(HUD)的首脑-显示器(HUD)是一种透明的显示屏,比其他图像或视图的数据。
一般HUD的数据被投射到一个透明的合成,reVlects单色光波或在屏幕上的实时图像绘制。
有时也被称为HUD的-屏幕显示(OSD)。
在望远镜的HUD通常绘制现场的照片,从相机,从而增强现实功能技术上是可行的和转动设备运行到一个复杂的SCI -六viewVinder。
在望远镜的HUD 也绘制在地图或彩色背景,取决于应用程序的设置,是什么让一喜-高科技罗盘或导航小工具。
望远镜提出了很多在HUD的实时数据。
GPS坐标:在当前位置测地纬度和经度坐标与相应半球度,分钟和秒表示。
MGRS:当前在军事网格定位器(MGRS)坐标。
海拔:海拔高度。
:YYYY.MM.DD为HH:MM:SS格式的当前日期和时间。
方位:目前真正的或磁罗盘或度和密尔认为,随着目前的磁偏角度和指南针拳击大地测量方位。
大地测量方位测量0°180°顺时针方向从北到南,从180°到360°顺时针从南到北在相反为天文学中使用。
模式:目前罗盘模式指示灯。
一个字母“G”代表为罗经模式。
的“M” -手动定位时,方位是由手工设置。
-“C”汽车模式时,在当前的运动当然被认为是当前方位。
没有迹象表示,指南针是在磁场的模式,是对磁力或数字指南针传感器目前的设备的默认罗盘模式运作。
方位圈:方位圈是用于测量方位的仪器。
在望远镜的方位圈是一个毕业圆度,密尔和指南针拳击标志。
当前方位标记与轴承箭。
轴承箭:轴承箭头标记的方位圈当前的方位和将指向相应的方向。
海拔(节距)的规模是在同一时间基础或轴的轴承箭头。
高程(节距):高程(节距),规模相当于目前水平面和设备的屏幕平面之间的角度。
毕业与学位和密尔规模。
当前的仰角与机翼或十字标线标记。
高程规模始终是垂直的天际线,从而使轴在同一时间或方位圈轴承箭头基地。
高程或俯仰角是多少设备是在船尾或来回旋转。
地平线(卷):地平线(卷)的角度显示装置是旋转的多少左或右。
望远镜工作在任何可能的方向调整必要零参照系,从而可以测量地平线的角度限制在两个方向上,以45°。
当你需要更大的视野角度来衡量,使用设备的方向锁定功能。
翼:像飞机驾驶舱中常见的永光罩。
翼或十字光罩对准地平线,并协助瞄准。
翼光罩可打开或关闭,并与十字线十字线代替。
翼或十字光罩在屏幕的中心,也标志着的目前高程规模的仰角。
RangeCinder:像狙击范围通常在发现一个光罩RangeVinder规模或允许快速测量距离的对象被设置为一个已知大小1.7米或5.6英尺,上取决于单位conVigured在应用程序设置的。
时,例如,对象的高度1.7米的完美VITS之间传播它的距离是100米的标志上rangeVinder规模。
当对象之间至少蔓延VITS,标志着它500米的距离。
当对象维茨之间的一半,标志着对应至100米,那么它的距离是50米。
规模的第一步是最大测量范围的十分之一,或者是50米或150英尺。
缩放级别:缩放级别显示,从现场照片,也适用于所有依赖的HUD元素一样的的高程规模或随着增强现实对象映射RangeVinder光罩相机的变焦倍数。
地图的比例因子。
增强现实标记(AR):望远镜实现增强现实技术来执行不同的导航,对象Vinding和测量任务。
要显示或标记在屏幕上,它使用特殊的增强现实标记看起来像圆圈,箭头,甚至图像星星,太阳和月亮像对象的距离,方位命名的标签和其他信息的陪同下实物计算位置和海拔高度。
天体标记看起来像空心的圆圈,或像他们的现实生活中相应的图像跟随对象的名称,方位和海拔。
轴承对象标记看起来像实心圆和也与方位角和海拔高度。
Location对象标记是实心箭头和距离和方位角。
启动轴承(AR):在视觉角度测量由六分仪工具执行的开始轴承AR标记。
当测量完成标志更新与实测值最接近的两个轴承之间的旋转角度。
结束轴承(AR):最接近的的六分仪工具的帮助下做的两个轴承之间的旋转角度的视觉测量结束轴承AR标记。
截至轴承时设置的出发和增强现实标记与实测三角洲角度更新结束轴承。
提示:提示上绘制方位圈的内缘,是用来缓解对象Vinding。
提示仅绘制的对象,目前并不在视线中。
望远镜工作在整整三年-当设备与地面平行,并作为一个共同的指南针提示对应的对象方位的三维空间。
设备的情况下是垂直Vloor,用于作为viewVinder提示建议要在视线的对象最接近的旋转方向。
天体提示:暗示的天体看起来像一个小空心圆。
天体目标指针:是手动分配给特别提示当前利益的天体看起来像一个中空的线框箭头。
位置提示:提示一个位置或一个轴承看上去像一个小实心圆。
目标位置指针:是手动分配的特别提示当前位置或息对象看起来像一个坚实的箭头。
主要目标指针:首要目标指针看起来作为magniVied目标的指针,从而更容易分辨从他人的首要目标。
目标距离:距离主要的目标位置的物体或方位角和海拔天体或轴承的主要目标。
埃塔的目标:预计抵达时间预计为当前的首要目标的基本算法距离减少的情况下随着时间的推移,目前的速度是每小时超过一公里。