华南理工大学现代控制理论课件-3
合集下载
现代控制理论多媒体课件

航空器自动驾驶
在民航和通用航空领域, 现代控制理论用于实现航 空器的自动驾驶和自动降 落等功能。
工业自动化
智能制造
现代控制理论在智能制造 领域中用于实现生产线的 自动化、优化和调度。
工业机器人
通过现代控制理论对工业 机器人进行精确控制,提 高生产效率和产品质量。
过程控制
在化工、制药、冶金等行 业中,现代控制理论用于 实现生产过程的自动化和 优化。
现代控制理论多媒 体课件
contents
目录
• 现代控制理论概述 • 现代控制理论的核心概念 • 现代控制理论的应用领域 • 现代控制理论的基本方法 • 现代控制理论的挑战与展望 • 现代控制理论案例分析
01
CATALOGUE
现代控制理论概述
定义与特点
定义
现代控制理论是研究如何通过输入信号来控制和调节系统状态的一门科学。它 以数学为主要工具,通过建立系统的数学模型,分析系统的动态行为,以达到 优化系统性能的目的。
未来展望
03Biblioteka 随着科技的不断进步,现代控制理论将继续发展,并应用于更
多领域,解决更复杂的实际问题。
02
CATALOGUE
现代控制理论的核心概念
状态空间法
01
状态空间法是一种描述动态系统的方法,通过状态 变量和输入变量来描述系统的运动过程。
02
它能够全面地反映系统的内部结构和动态特性,为 系统的分析和设计提供了有力的工具。
控制系统的安全与稳定性
安全性
在控制系统中,安全性是一个重要的考虑因 素。系统需要能够应对各种异常和故障情况 ,确保设备和人员的安全。
稳定性
稳定性是控制系统的一个重要特性,它涉及 到系统的长期行为和响应。保持系统的稳定
《现代控制理论》课件

现代控制理论
目录
• 引言 • 线性系统理论 • 非线性系统理论 • 最优控制理论 • 自适应控制理论 • 鲁棒控制理论
01
引言
什么是现代控制理论
现代控制理论是一门研究动态系统控制的学科,它利用数学模型和优化方法来分析 和设计控制系统的性能。
它涵盖了线性系统、非线性系统、多变量系统、分布参数系统等多种复杂系统的控 制问题。
20世纪60年代
线性系统理论和最优控制理论得到发展,为现代控制理论的建立奠定 了基础。
20世纪70年代
非线性系统理论和自适应控制理论逐渐发展起来,进一步丰富了现代 控制理论的应用范围。
20世纪80年代至今
现代控制理论在智能控制、鲁棒控制、预测控制等领域取得了重要进 展,为解决复杂系统的控制问题提供了更有效的工具。
01
利用深度学习算法对系统进行建模和学习,实现更高
效和智能的自适应控制。
多变量自适应控制
02 研究多变量系统的自适应控制方法,以提高系统的全
局性能。
非线性自适应控制
03
发展非线性系统的自适应控制方法,以处理更复杂的
控制系统。
06
鲁棒控制理论
鲁棒控制的基本概念
鲁棒控制是一种设计方法,旨在 提高系统的稳定性和性能,使其 在存在不确定性和扰动的情况下
自适应逆控制
一种基于系统逆动态特性的自适应控制方法,通过对系统 逆动态特性的学习和控制,实现系统的自适应控制。
自适应控制系统设计
系统建模
建立被控对象的数学模型,包括线性系统和非线性系统。
控制器设计
根据系统模型和性能指标,设计自适应控制器,包括线性自适应控制器和 非线性自适应控制器。
参数调整
根据系统运行状态和环境变化,调整控制器参数,以实现最优的控制效果 。
目录
• 引言 • 线性系统理论 • 非线性系统理论 • 最优控制理论 • 自适应控制理论 • 鲁棒控制理论
01
引言
什么是现代控制理论
现代控制理论是一门研究动态系统控制的学科,它利用数学模型和优化方法来分析 和设计控制系统的性能。
它涵盖了线性系统、非线性系统、多变量系统、分布参数系统等多种复杂系统的控 制问题。
20世纪60年代
线性系统理论和最优控制理论得到发展,为现代控制理论的建立奠定 了基础。
20世纪70年代
非线性系统理论和自适应控制理论逐渐发展起来,进一步丰富了现代 控制理论的应用范围。
20世纪80年代至今
现代控制理论在智能控制、鲁棒控制、预测控制等领域取得了重要进 展,为解决复杂系统的控制问题提供了更有效的工具。
01
利用深度学习算法对系统进行建模和学习,实现更高
效和智能的自适应控制。
多变量自适应控制
02 研究多变量系统的自适应控制方法,以提高系统的全
局性能。
非线性自适应控制
03
发展非线性系统的自适应控制方法,以处理更复杂的
控制系统。
06
鲁棒控制理论
鲁棒控制的基本概念
鲁棒控制是一种设计方法,旨在 提高系统的稳定性和性能,使其 在存在不确定性和扰动的情况下
自适应逆控制
一种基于系统逆动态特性的自适应控制方法,通过对系统 逆动态特性的学习和控制,实现系统的自适应控制。
自适应控制系统设计
系统建模
建立被控对象的数学模型,包括线性系统和非线性系统。
控制器设计
根据系统模型和性能指标,设计自适应控制器,包括线性自适应控制器和 非线性自适应控制器。
参数调整
根据系统运行状态和环境变化,调整控制器参数,以实现最优的控制效果 。
华南理工大学现代控制理论复习知识点PPT课件
2
第一章复习要点
1. 建立连续时间系统的状态空间表达式
系统结构图建立
转化为有积分号的模拟图,取状态变量,根据变量 关系写出一阶微分方程组,状态空间表达式
系统机理(电气系统、动力学系统)
取状态变量,建立微分方程,整理,写出状态空间 表达式
传递函数
能控标准I型(直接写出),能观标准II型(B计算系数)
状态反馈:前提:系统完全能控
直接方法: 1) f(I (A+BK)) 2) f*() 3) f()与f*()比较得出K;
间接方法: 1) A变换为能控标I型,Tc1,A’, -> (a’0, … a’n-1 ); 2) 闭环系统新的多项式: f*(); 3) 计算K=K’ Tc1-1, K’i= a’I a*i
1、状态反馈
原理:状态反馈增益矩阵K… 结构图? 特点:改变闭环系统的特征值,可配置极点
2、输出反馈
原理:输出反馈增益矩阵H… 结构图? 特点:
3、闭环系统的能控性、能观性
状态反馈不改变系统的能控性,但不保证能观性不变 输出反馈不改变系统的能控性和能观性
21
第五章复习要点
4、极点配置
17
第四章复习要点
第二方法:平衡状态xe,满足f(xe)=0。 若存在标量函数V(x),满足:
V(x)对所有x都具有连续的一阶偏导 V(x)正定,即当x=0,V(x)=0; x0,V(x) >0; V(x)沿状态轨迹方向计算的时间导数V’(x)满足条件: V’(x)半负定(0):xe李亚普诺夫意义下稳定; V’(x)负定,或V’(x)半负定(0)但除x=0外V’(x)不恒为
12
第三章复习要点
3、标准型及转化 (单输入单输出,系统能控)
第一章复习要点
1. 建立连续时间系统的状态空间表达式
系统结构图建立
转化为有积分号的模拟图,取状态变量,根据变量 关系写出一阶微分方程组,状态空间表达式
系统机理(电气系统、动力学系统)
取状态变量,建立微分方程,整理,写出状态空间 表达式
传递函数
能控标准I型(直接写出),能观标准II型(B计算系数)
状态反馈:前提:系统完全能控
直接方法: 1) f(I (A+BK)) 2) f*() 3) f()与f*()比较得出K;
间接方法: 1) A变换为能控标I型,Tc1,A’, -> (a’0, … a’n-1 ); 2) 闭环系统新的多项式: f*(); 3) 计算K=K’ Tc1-1, K’i= a’I a*i
1、状态反馈
原理:状态反馈增益矩阵K… 结构图? 特点:改变闭环系统的特征值,可配置极点
2、输出反馈
原理:输出反馈增益矩阵H… 结构图? 特点:
3、闭环系统的能控性、能观性
状态反馈不改变系统的能控性,但不保证能观性不变 输出反馈不改变系统的能控性和能观性
21
第五章复习要点
4、极点配置
17
第四章复习要点
第二方法:平衡状态xe,满足f(xe)=0。 若存在标量函数V(x),满足:
V(x)对所有x都具有连续的一阶偏导 V(x)正定,即当x=0,V(x)=0; x0,V(x) >0; V(x)沿状态轨迹方向计算的时间导数V’(x)满足条件: V’(x)半负定(0):xe李亚普诺夫意义下稳定; V’(x)负定,或V’(x)半负定(0)但除x=0外V’(x)不恒为
12
第三章复习要点
3、标准型及转化 (单输入单输出,系统能控)
现代控制理论3
3
x3
b31
b32
b3 p
u3
xn
n xn bn1 bn2 bnp u p
➢其中的对角部分应用对角形可控判据 ,即要求输入矩阵B中 不出现全零行,则系统对角部分的状态可控。
➢约当部分,展开后可得
x&1 1x1 x2 b11u1 b12u2 L b1pup
x&2 1x2 b21u1 b22u2 L b2 pup
要求约当块最后一行对应的输入矩阵B中的行不出现全零行,则 系统约当部分的状态可控。
(b)
x&1 1 1
x&2
1
x1 b11 b12 L
x2
b21
b22
L
x&3
x&4
1 1
x3 x4
b31 b41
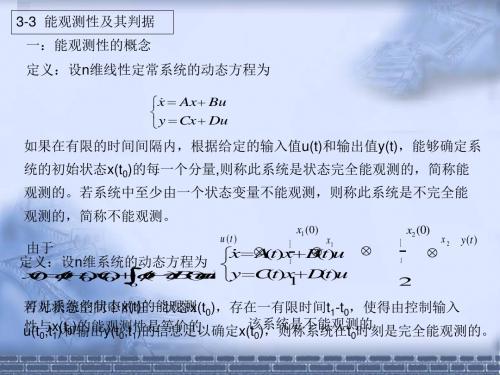
限 时 间 间 隔 0≤t≤nT 内 , 针 对 任 意 初 态 x(0) 和 任 意 终 态
x(n),当k=n时,u(0),u(1),…,u(n-1)一定存在。
因此,k=n时,u(0),u(1),…,u(n-1)的解存在的条
件,即为系统可控时应满足的条件
令k=n ,
n1
x(n) Gn x(0) Gdetb
det Sc 0
Ab b1
b2
1b1 2b2
2b1b2 1b1b2
1 2
b1 0, b2 0
输入阵中无全零行
A
1
0
1
1
b
b1 b2
det Sc det b
Ab b1 b2
1b1 b2 1b2
1b1b2 (1b1 b2 )b2 b22
(2) 线性定常连续系统可控性判据
现代控制理论(II)-讲稿-课件-ppt--3

现代控制工程基础 这种输出反馈系统的状态方程为 dX(t)/dt=AX(t)+Bu(t)=(A+BHC)X(t)+BGr(t) or X(k+1)=AX(k)+Bu(k)=(A+BHC)X(k)+BGr(k)
从而,这种输出反馈系统的传递函数矩阵为 从而,这种输出反馈系统的传递函数矩阵为(D=0)
GH ( s ) = C ( sI − ( A + BHC )) −1 BG
现代控制工程基础
例:设系统(A,B,C)为 设系统( )
0 1 A= , 1 0 0 B = , 1 C = [0 1]
试分析采用状态反馈K=[k1 k2]后的可控性和可观性。 后的可控性和可观性。 试分析采用状态反馈 后的可控性和可观性 解:容易验证原系统具有可控性和可观性,因为 容易验证原系统具有可控性和可观性,
*证明参见郭雷主编《控制理论导论》p51-55。 证明参见郭雷主编《控制理论导论》 证明参见郭雷主编 。
现代控制工程基础
(2)状态反馈保持系统的输入解耦零点不变 ) 证明:设原系统不完全可控, 是系统的一个不可控振型( 证明:设原系统不完全可控,so是系统的一个不可控振型(系统的一 个特征值),即它是系统的一个输入解耦零点, 个特征值),即它是系统的一个输入解耦零点,就有 ),即它是系统的一个输入解耦零点 rank[soI-A B]<n 那么,根据状态反馈不改变系统的可控性性质, 那么,根据状态反馈不改变系统的可控性性质,就有 rank[soI- (A+BK) BG]=rank[soI-A B] <n 也是状态反馈系统的一个输入解耦零点,反之也然。 即 so也是状态反馈系统的一个输入解耦零点,反之也然。证毕
华南理工大学现代控制理论课件-3(精选)PPT文档17页

华南理工大学现代控制理论课件-3 (精选)
36、如果我们国家的法律中只有某种 神灵, 而不是 殚精竭 虑将神 灵揉进 宪法, 总体上 来说, 法律就 会更好 。—— 马克·吐 温 37、纲纪废弃之日,便是暴政兴起之 时。— —威·皮 物特
38、若是没有公众舆论的支持,法律 是丝毫 没有力 量的。 ——菲 力普斯 39、一个判例造出另一个判例,它们 迅速累 聚,进 而变成 法律。 ——朱 尼厄斯
拉
60、生活的道路一旦选定,就要勇敢地 走到底 ,决不 回头。 ——左
40、人类法律,事物有规律,这是不 容忽视 的。— —爱献 生
56、书不仅是生活,而且是现在、过 去和未 来文化 生活的 源泉。 ——库 法耶夫 57、生命不可能有两次,但许多人连一 次也不 善于度 过。— —吕凯 特 58、问渠哪得清如许,为有源头活水来 。—— 朱熹 59、我的努力求学没有得到别的好处, 只不过 是愈来 愈发觉 自己的 无知。 ——笛 卡儿
36、如果我们国家的法律中只有某种 神灵, 而不是 殚精竭 虑将神 灵揉进 宪法, 总体上 来说, 法律就 会更好 。—— 马克·吐 温 37、纲纪废弃之日,便是暴政兴起之 时。— —威·皮 物特
38、若是没有公众舆论的支持,法律 是丝毫 没有力 量的。 ——菲 力普斯 39、一个判例造出另一个判例,它们 迅速累 聚,进 而变成 法律。 ——朱 尼厄斯
拉
60、生活的道路一旦选定,就要勇敢地 走到底 ,决不 回头。 ——左
40、人类法律,事物有规律,这是不 容忽视 的。— —爱献 生
56、书不仅是生活,而且是现在、过 去和未 来文化 生活的 源泉。 ——库 法耶夫 57、生命不可能有两次,但许多人连一 次也不 善于度 过。— —吕凯 特 58、问渠哪得清如许,为有源头活水来 。—— 朱熹 59、我的努力求学没有得到别的好处, 只不过 是愈来 愈发觉 自己的 无知。 ——笛 卡儿
现代控制理论ppt

x ( t ) f x ( t ) u( t ) y ( t ) g x ( t ) u( t )
1.1.2 控制系统的状态空间表达式
5.非线性时变系统:
x( t ) f x( t ), u( t ), t y( t ) g x( t ), u( t ), t
但因 uc1+uc2+uc3=0
显然他们是线性相关的,故只有两个变量是独立 的,因此,最小变量组的个数应是二。
一般的: 状态变量个数=系统含有独立储能元件的个数 =系统的阶数 对于n阶系统,有n个状态变量: x1(t), x2(t), … xn(t) ﹡状态变量具有非唯一性的:
1.1.1 状态、状态变量和状态空间
1 控制系统的状态空间模型
我们把这种输入/输出描述的数学模型称为系统 的外部描述,内部若干变量,在建模的中间过程, 被当作中间变量消掉了。 现代理论模型:由状态变量构成的一阶微分方 程组来描述,其中包含了系统全部的独立变量。 特别是在数字计算机上求解一阶微分方程组比 求解与之相应的高阶微分方程要容易得多,而且能 同时给出系统的全部独立变量的响应。此外,在求 解过程中,还可以方便地考虑初始条件产生的影响。 因而能同时确定系统内部的全部运动状态。
数学模型:描述系统动态行为的数学表达式, 称为控制系统的数学模型。 经典理论模型:用一个高阶微分方程或传递函 数描述。系统的动态特性仅仅由一个单输出对给定 输入的响应来表征。
实际上,系统内部还有若干其他变量,他们之 间(包含输出变量在内)是相互独立的。关于他们 对输入的响应是不易相互导出的,必须重新分别建 模求解。由此可见,单一的高阶微分方程,是不能 完全揭示系统内全部运动状态的。
1.1.1 状态、状态变量和状态空间
1.1.2 控制系统的状态空间表达式
5.非线性时变系统:
x( t ) f x( t ), u( t ), t y( t ) g x( t ), u( t ), t
但因 uc1+uc2+uc3=0
显然他们是线性相关的,故只有两个变量是独立 的,因此,最小变量组的个数应是二。
一般的: 状态变量个数=系统含有独立储能元件的个数 =系统的阶数 对于n阶系统,有n个状态变量: x1(t), x2(t), … xn(t) ﹡状态变量具有非唯一性的:
1.1.1 状态、状态变量和状态空间
1 控制系统的状态空间模型
我们把这种输入/输出描述的数学模型称为系统 的外部描述,内部若干变量,在建模的中间过程, 被当作中间变量消掉了。 现代理论模型:由状态变量构成的一阶微分方 程组来描述,其中包含了系统全部的独立变量。 特别是在数字计算机上求解一阶微分方程组比 求解与之相应的高阶微分方程要容易得多,而且能 同时给出系统的全部独立变量的响应。此外,在求 解过程中,还可以方便地考虑初始条件产生的影响。 因而能同时确定系统内部的全部运动状态。
数学模型:描述系统动态行为的数学表达式, 称为控制系统的数学模型。 经典理论模型:用一个高阶微分方程或传递函 数描述。系统的动态特性仅仅由一个单输出对给定 输入的响应来表征。
实际上,系统内部还有若干其他变量,他们之 间(包含输出变量在内)是相互独立的。关于他们 对输入的响应是不易相互导出的,必须重新分别建 模求解。由此可见,单一的高阶微分方程,是不能 完全揭示系统内全部运动状态的。
1.1.1 状态、状态变量和状态空间
现代控制理论(1-8讲第1-2章知识点)精品PPT课件
dia dt
Ke
I fD Coபைடு நூலகம்st
n f Const
nDJ , f
其中:Kf 为发电机增益常数;Ke 为电动机反电势常数。
(3).电动机力矩平衡方程:J
d
dt
f
Kmia
(Km
-电动机转矩常数)
以上三式可改写为:
d
dt
f J
Km J
ia
dia dt
Ke Ra
La
La
ia
Kf La
if
试写出其状态空间表达式。
解:选择相变量为系统的状态变量,有
•
•
•• •
x1 y x2 y x1 x3 y x2
故
即
•
x1 x2
•
x2 x3
•
x3
a0 a3
x1
a1 a3
x2
a2 a3
x3
1 a3
u
•
0
x 0
a0
a3
1 0 a1 a3
0
0
1 x 0 u
a2
1
a3 a3
a1 y a0 y
bnu (n)
b u (n1) n 1
b0u
(1)
分为两种情况讨论。
一、输入信号不含有导数项:
此时系统的运动方程为:
•
y(n)
a y(n1) n1
a1 y a0 y b u
故选
x1 y
•
x2 y
..
xn1
y(n2)
xn y(n1)
对左边各式求导一次,即有
18
24
2-3 化系统的频域描述为状态空间描述
现代控制理论理论.ppt
(t) eAt
1
(sI
A)1
2et 2et
e2t 2e2t
et e2t
et
2e2t
1(t)
(t)
e At
2et 2et
e2t 2e2t
et e2t
et
2e2t
§2 状态转移矩阵的求解
(m
1
1)
!
t
m1
e At e1t
1t
.
.
(m
1
2)
!
t
m
1
...
.
..
.
.
t
0
1
(2-23)
§2 状态转移矩阵的求解
若矩阵A为一约当矩阵,即
A1
A
J
A2
Aj
其中 A1, A2 , , Aj 为约当块
(t) eAt
(2-9)
t0 0
(t t0 ) e A(tt0 )
(2-10)
§1 自由运动
齐次方程的解,可表示为
x(t) (t)x(0)
或
x(t) (t t0)x(t0)
(2-11) (2-12)
上式表明齐次状态方程的解,在初始状态确定情况下,由状态
转移矩阵唯一确定,即状态转移矩阵 (t)包含了系统自由运动的全
§2 状态转移矩阵的求解
例2-5
考虑如下矩阵
现代控制理论教学课件

数字仿真实验结果分析 阐述如何对数字仿真实验结果进 行分析,包括性能指标的计算和 评估,以及对实验结果进行解释 和讨论。
数字仿真软件 介绍常用的数字仿真软件,如 MATLAB/Simulink等,并解释其 基本原理和使用方法。
数字仿真实验设计 详细说明数字仿真实验的设计方 法,包括如何建立系统模型、如 何设计控制器、如何设置仿真参 数等。
该方法能够全面地反映系统的性能,具有较强的适用性和实用 性。同时,该方法可通过实验手段进行验证,可靠性高。
设计过程相对较为复杂,需要一定的专业知识和经验。
适用于高阶系统和多变量系统的控制器设计,广泛应用于工程 实践中。
最优控制设计法
定义
最优控制设计法是一种基于最优化理论进行控制器设计的 方法。
缺点
现代控制理论阶段
自20世纪60年代开始,状态空间 法成为主导,适用于多输入多输 出、非线性、时变系统的分析与 设计。
现代控制理论的特点
状态空间描述
现代控制理论基于状态空间描述 ,通过状态变量全面反映系统内 部状态,提供更深入的系统分析
。
时域分析法
相比古典控制理论的频域分析法, 现代控制理论采用时域分析法,能 够直接反映系统的时间响应特性。
05
现代控制理论进阶知 识
系统的数学模型 ,包括微分方程、差分方程和状态方程等
。
A 非线性现象
介绍系统中的非线性现象,如死区 、饱和、滞后等,并分析其对系统
性能的影响。
B
C
D
非线性系统设计
探讨非线性控制系统的设计方法,如反馈 线性化、滑模变结构控制、反步法等。
稳定性分析
利用状态空间方程的特征值分析系统的稳定性,通过判断 特征值的分布来确定系统的稳定性。
数字仿真软件 介绍常用的数字仿真软件,如 MATLAB/Simulink等,并解释其 基本原理和使用方法。
数字仿真实验设计 详细说明数字仿真实验的设计方 法,包括如何建立系统模型、如 何设计控制器、如何设置仿真参 数等。
该方法能够全面地反映系统的性能,具有较强的适用性和实用 性。同时,该方法可通过实验手段进行验证,可靠性高。
设计过程相对较为复杂,需要一定的专业知识和经验。
适用于高阶系统和多变量系统的控制器设计,广泛应用于工程 实践中。
最优控制设计法
定义
最优控制设计法是一种基于最优化理论进行控制器设计的 方法。
缺点
现代控制理论阶段
自20世纪60年代开始,状态空间 法成为主导,适用于多输入多输 出、非线性、时变系统的分析与 设计。
现代控制理论的特点
状态空间描述
现代控制理论基于状态空间描述 ,通过状态变量全面反映系统内 部状态,提供更深入的系统分析
。
时域分析法
相比古典控制理论的频域分析法, 现代控制理论采用时域分析法,能 够直接反映系统的时间响应特性。
05
现代控制理论进阶知 识
系统的数学模型 ,包括微分方程、差分方程和状态方程等
。
A 非线性现象
介绍系统中的非线性现象,如死区 、饱和、滞后等,并分析其对系统
性能的影响。
B
C
D
非线性系统设计
探讨非线性控制系统的设计方法,如反馈 线性化、滑模变结构控制、反步法等。
稳定性分析
利用状态空间方程的特征值分析系统的稳定性,通过判断 特征值的分布来确定系统的稳定性。
现代控制理论ppt

求解方法
通过利用拉格朗日乘子法或Riccati方程,求 解线性二次调节器问题,得到最优控制输入
。
动态规划与最优控制策略
动态规划的基本思想
将一个多阶段决策问题转化为一系列单 阶段问题,通过求解单阶段问题得到多 阶段的最优解。
பைடு நூலகம்
VS
最优控制策略的确定
根据动态规划的递推关系,逐步求解每个 阶段的优化问题,最终得到最优控制策略 。
总结词
稳定性分析是研究非线性系统的重要方法,主要关注系统在受到扰动后能否恢 复到原始状态或稳定状态。
详细描述
稳定性分析通过分析系统的动态行为,判断系统是否具有抵抗外部干扰的能力。 对于非线性系统,稳定性分析需要考虑系统的初始状态、输入信号以及系统的 非线性特性等因素。
非线性系统的控制设计方法
总结词
要点二
详细描述
线性系统是指在输入和输出之间满足线性关系的系统,即 系统的输出量可以用输入量的线性组合来表示。线性系统 的性质包括叠加性、均匀性和时不变性等。叠加性是指多 个输入信号的响应等于各自输入信号响应的总和;均匀性 是指系统对不同频率信号的响应是一样的;时不变性是指 系统对时间的变化不敏感,即系统在不同时刻的响应是一 样的。
量随时间的变化规律,输出方程描述了输出量与状态变量之间的关系。
线性系统的稳定性分析
• 总结词:稳定性是控制系统的重要性能指标之一,线性系统的稳定性分 析是现代控制理论的重要研究内容。
• 详细描述:稳定性是控制系统的重要性能指标之一,如果一个系统受到 扰动后能够自我恢复到原来的状态,那么这个系统就是稳定的。线性系 统的稳定性分析是现代控制理论的重要研究内容,常用的方法有劳斯赫尔维茨稳定判据和奈奎斯特稳定判据等。劳斯-赫尔维茨稳定判据是 一种基于系统极点的判据,通过判断系统的极点是否都在复平面的左半 部分来判断系统的稳定性;奈奎斯特稳定判据是一种基于频率域的判据, 通过判断系统的频率响应是否在复平面的右半部分来判断系统的稳定性。
现代控制理论课件 第三讲

g(s) Y (s) 1 6s2 10s 5 1 g(s)
U (s)
s3 6s2 11s 6
令 g(s) Y (s)
则有
U (s)
Y
(
s)
U
(s)
6s1 10s2 5s3 1 6s1 11s2 6s3
E(s)
U
(s)
1
6s1
1 11s 2
6s3
即:
E(s) U (s) 6s1E(s) 11s2E(s) 6s3E(s) Y (s) 6s1E(s) 10s2E(s) 5s3E(s)
可写成向量-矩阵的形式:
x Ax bu y Cx du
即:
x1 0
x2
0
1 0
0 1
0 x1 n1
0
x2
n2
u
xn1
0
0
0
1
xn1
1
xn a0 a1 a2 an1 xn 0
y 1 0
x1
(b0 a0b3 )x1
x1 0 1 0 x1 0
x2
0
0
1
x2
0u
x3 a0 a1 a2 x3 1
y (b0 a0b3 )
(b1 a1b3 )
x1
(b2
a2b3
)
x2
x3
b3u
系统的状态方程:
x1 x2 n1u x2 x3 n2u
xn1 xn 1u xn a0 x1 a1x2 an2 xn1 an1xn nu
0
x2
nu
xn
u
0
xn S 1
1
xn
n1 n
S
xn1 x&2
现代控制理论课件

x1
R L
x1
1 L
x2
1 L
e
x 2
输出方程为
y x2
x1 i x2
1 C
x1
1 C
idt 则状态方程为
13
其向量-矩阵形式为
x1
x 2
1CR
C
1 L
0
x1 x2
1
L 0
e)
1 x1
C
x2
x1无明确意义的物理量),可以推
x 2
1 C
i
1 RC
( x1
x2 )
y x2
14
其向量-矩阵形式为
x1
x
2
1 RC
1
R L
RC
1
RC 1
x1 x2
RC
1.1 系统数学描述的两种基本方法
控制u
执行器
被控过程 x
被控对象
传感器
控制器
控制输入
典型控制系统方框图
观测y 反馈控制
u1
y1
u2
x1, x2 ,xn
y2
up
yq
被控过程
5
典型控制系统由被控对象、传感器、执行器和控制器组成。
被控过程具有若干输入端和输出端。
数学描述方法: 输入-输出描述(外部描述):高阶微分方程、传递函数矩阵。
《现代控制理论》PPT课件
精选ppt
8
4、控制理论发展趋势
❖ 企业:资源共享、因特网、信息集成、 信息技术+控制技术 (集成控制技术)
❖ 网络控制技术
❖ 计算机集成制造CIMS:(工厂自动化)
பைடு நூலகம்
精选ppt
9
三、现代控制理论与古典控制理论的对比
❖ 共同 对象-系统 主要内容 分析:研究系统的原理和性能 设计:改变系统的可能性(综合性能)
❖ 现代控制理论 哈工大 机械专业硕研
精选ppt
12
精选ppt
7
3.智能控制理论 (60年代末至今)
❖ 1970——1980 大系统理论 控制管理综合 ❖ 1980——1990 智能控制理论 智能自动化 ❖ 1990——21c 集成控制理论 网络控制自动化
(1) 专家系统;(2)模糊控制,人工智能 (3) 神经网络,人脑模型;(4)遗传算法 控制理论与计算机技术相结合→计算机控制技术
现代控制理论
Modern Control Theory
精选ppt
1
绪论
❖ 学习现代控制理论的意义: 1.是所学专业的理论基础 2.是研究生阶段提高理论水平的重要环节。 3. 是许多专业考博士的必考课。
精选ppt
2
一、控制的基本问题
❖ 控制问题:对于受控系统(广义系统)S,
寻求控制规律μ(t),使得闭环系统满足给
现代控制理论发展的主要标志 (1)卡尔曼:状态空间法; (2)卡尔曼:能控性与能观性; (3)庞特里雅金:极大值原理;
精选ppt
6
现代控制理论的主要特点
❖ 研究对象: 线性系统、非线性系统、时变系统、多 变量系统、连续与离散系统
❖ 数学上:状态空间法
现代控制理论第3章-PPT课件
2 1 1 x ( 2 ) Gx ( 1 ) hu ( 1 ) 6 2 u ( 0 ) 0 u ( 1 ) 0 1 1
2 1 1 1 x ( 3 ) Gx ( 2 ) hu ( 2 ) 12 2 u ( 0 ) 2 u ( 1 ) 0 u ( 2 ) 4 3 1 1
0 0 1 2 2 4 2 Q G H 0 1 0 2 0 4 c H GH 1 0 0 4 1 10 rankQ 3 c
系统是能控的
令x(1)=0
1 1 x ( 0 ) G Hu ( 0 )0 2
2 x ( 0 ) 1 1 x ( 0 ) 2 2 3 x ( 0 ) 3
T
t 1
0
满秩,或 C ( t ) 的列线性无关. 定理二:线性定常连续系统能观测的充分必要条件是能观测性矩阵QO满 秩,即
C CA rank CA CA 2 n n 1
rankQ
O
定理三:线性定常连续系统能观测的充分必要条件是(n+m)×n型矩阵
0 1 0 1 0 0
二:能观测性判据
1 线性时变系统 定理一:系统在t0时刻能观测的充要条件是下列格兰姆矩阵:
T T W ( t , t ) ( t , t ) C ( t ) C ( t ) ( t , t ) dt 为非奇异矩阵 01 0 0 t 1 t 0
证明:充分性
设 u(t ) 0
k 1 i xk ( ) G x ( 0 ) G H u () i k i 0
现代控制理论课件

y2
up
yq
被控过程
12
典型控制系统由被控对象、传感器、执行器和控制器组成。
被控过程具有若干输入端和输出端。
数学描述方法: 输入-输出描述(外部描述):高阶微分方程、传递函数矩阵。
种完整的描述。
状态空间描述(内部描述):基于系统内部结构,是对系统的一
13
1.2 状态空间描述常用的基本概念
1) 输入:外部对系统的作用(激励); 控制:人为施加的激励;
8
❖ 经典控制理论:
引论
数学模型:线性定常高阶微分方程和传递函数;
分析方法: 时域法(低阶1~3阶)
根轨迹法 频域法
近似分析
适应领域:单输入-单输出(SISO)线性定常系统
缺 点:只能反映输入-输出间的外部特性,难以揭示系统内部的结构和运行状态。
❖ 现代控制理论:
数学模型:以一阶微分方程组成差分方程组表示的动态方程
6
❖ 现代控制理论的基本内容 ❖ 科学在发展,控制论也在不断发展。所以“现代”两个字加在“控制理
论”前面,其含义会给人误解的。实际上,我们讲的现代控制理论指的 是五六十年代所产生的一些控制理论,主要包括: ❖ 用状态空间法对多输入多输出复杂系统建模,并进一步通过状态方程求 解分析,研究系统的可控性、可观性及其稳定性,分析系统的实现问题; ❖ 用变分法、最大(最小)值原理、动态规划原理等求解系统的最优控制 问题;其中常见的最优控制包括时间最短、能耗最少等等,以及它们的 组合优化问题;相应的有状态调节器、输出调节器、跟踪器等综合设计 问题; ❖ 最优控制往往要求系统的状态反馈控制,但在许多情况下系统的状态是 很难求得的,往往需要一些专门的处理方法,如卡尔曼滤波技术来求得。 这些都是现代控制理论的范畴。 ❖ 六十年代以来,现代控制理论各方面有了很大的发展,而且形成几个重 要的分支课程,如线性系统理论,最优控制理论,自适应控制理论,系 统辩识理论,等等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
2
x1, x2
ode45(‘dosc', [0 10], [1 0]); function time interval initial condition
0
-1
0
2
4
6
8
10
time, sec
Phase Portraits (2D systems only)
Phase plane plots show 2D dynamics as vector fields & stream functions • Plot f(x) as a vector on the plane; stream lines follow the flow of the arrows phaseplot(‘dosc’, ... d x1 x2 [-1 1 10], [-1 1 10], ... x = − x − x dt 2 1 2 boxgrid([-1 1 10], [-1 1 10]));
•
Equilibrium points (2) 200 • (0,0): unstable ⇒ species don’t die out 180 • ~(50,35): unstable ⇒ no steady state 160 population 140 Invariant curves (3) 120 • Start on curve, stay on curve x2 100 • “Limit cycle” ⇒ population of each 80 species oscillates over time 60 • This is a global feature of the dynamics 40 (not local to an equilibrium point)
20 0 0
stable unstable
50
100 x1
150
200
Input/Output Performance
• Return to system with inputs • How does system response to changes in input values? • Transient response: • What happens right after a new input is applied • Steady state response:
0 1
Example #1: Double Inverted Pendulum
• Two series coupled pendula • States: pendulum angles (2), velocities (2) • Dynamics: F = ma (balance of forces) • Dynamics are very nonlinear Eq #1 Eq #2
•
Example #2: Predator Prey (ODE version)
• Continuous time (ODE) version of predator prey dynamics:
ɺ x1 = br x1 − ax1 x2 ɺ x2 = ax1 x2 − d f x2
•
Continuous time (ODE) model MATLAB: predprey.m (from web page)
Principle: Choice of model depends on the questions you want to answer
u(t) q2 q1 m1 k1 k2 m2
k3
b
function dydt = f(t,y, k1, k2, k3, m1, m2, b, omega) u = 0.00315*cos(omega*t); dydt = [ y(3); y(4); -(k1+k2)/m1*y(1) + k2/m1*y(2); k2/m2*y(1) - (k2+k3)/m2*y(2) - b/m2*y(4) + k3/m2*u ];
Eq #3
Eq #4
•
Stability of equilibria • Eq #1 is stable • Eq #3 is unstable • Eq #2 and #4 are unstable, but with some stable “modes”
Local versus Global Behavior
Stability of Equilibrium Points
• • An equilibrium point is: 0.5 Asymptotically stable if all nearby initial conditions con- 0 verge to the equilibrium -0.5 point -1 -1 • Equilibrium point is an 1 attractor or sink Unstable if some initial 0.5 conditions diverge from the 0 equilibrium point -0.5 • Equilibrium point is a -1 source (or saddle) -1 Stable if initial conditions 1 that start near the 0.5 equilibrium point, stay near 0 • Equilibrium point is a center -0.5
Step Response
• Output characteristics in response to a “step” input • Rise time: time required to move from 10% to 90% of final value • Overshoot: ratio between amplitude of first peak and steady state value • Settling time: time required to remain w/in p% (usually 2%) of final value • Steady state value: final value at t = 1
-1 -1 1
1 0 -1 0
t →∞
5
10
lim x (t ) = xe ∀ x (0) − xe < ε
0 1
1 0 -1 0
t →∞
•
5
10
lim x (t ) = ∞ for some x (0)
0 1
1 0 -1 0 5 10
•
x (t ) − xe <ε ∀t , x (0) − xe < δ ε
-0.015 0
Mass spring system (L2.1)
200 300 400 500
100
• Nearly unstable systems (slow convergence) often exhibit “ringing” (highly oscillatory response to [non-periodic] inputs)
• Stability is a local concept • Equilibrium points define the local behavior of the dynamical system • Single dynamical system can have stable and unstable equilibrium points Region of attraction • Set of initial conditions that converge to a given equilibrium point
1 1
0.5 x x
0.5
2
0
2
0
-0.5
-0.5
-1 -1
0 x 1
1
-1 -1
0 x 1
1
Equilibrium Points
Equilibrium points represent stationary conditions for the dynamics
2
x2 0
-2 -2π 0 2π
x1
0.005 0.015
Transient
Steady State
0.01
• What happens a long time after the input is applied • Stability vs input/output performance
0
-0.005
-0.01
• Systems that are close to instability typically exhibit poor input/output performance
CDS 101: Lecture 3.1 Stability and Performance
Richard M. Murray 13 October 2003 Goals: Describe different types of stability for an equilibrium point Explain the difference between local/global stability, and related concepts Describe performance measures for (controlled) systems, including transients and steady state response Reading: Åström and Murray, Analysis and Design of Feedback Systems, Ch 3