材料科学基础材料的变形和再结晶介绍
材料科学基础_第五章材料的形变和再结晶

材料科学基础_第五章材料的形变和再结晶材料的形变是指材料在外力作用下发生的形状、尺寸及结构的变化。
形变可以分为弹性变形和塑性变形两种形式。
弹性变形是指物质在外力作用下只发生形状的改变,而不发生组织内部结构的改变,当外力消失时,物质能恢复到原来的形状。
塑性变形是指物质在外力作用下发生形状和内部结构的改变,当外力消失时,物质不能恢复到原来的形状。
形变过程中,材料的内部晶粒会发生滑移、动晶界和晶界迁移等变化,这些变化有助于减小材料中的位错密度,同时也能影响晶粒的尺寸、形状和分布。
当形变达到一定程度时,晶粒内部会产生高密度的位错,这会导致晶体的韧性下降,同时也容易引起晶粒的断裂和开裂。
因此,形变过程中产生的位错对材料的性能具有重要影响。
再结晶是指在材料的形变过程中,通过退火处理使晶粒重新长大,去除或减小形变过程中产生的位错和晶界等缺陷,从而改善材料的力学性能和其他性能。
再结晶的发生与材料的种类、成分、形变方式等因素有关。
再结晶可以通过两种方式实现:显微再结晶和亚显微再结晶。
显微再结晶是指晶粒在正常晶界上长大,形成新的晶粒;亚显微再结晶是指材料中的一些晶粒发生部分再结晶,形成较大的再结晶晶粒。
再结晶的发生和发展受到晶粒的尺寸、形状和分布的影响。
晶粒尺寸越小,再结晶发生越容易,且再结晶晶粒的尺寸也越小。
再结晶晶粒的尺寸和分布对材料的性能影响很大。
晶粒尺寸较小的材料通常具有优良的力学性能和高韧性,且易于加工。
因此,控制再结晶晶粒的尺寸和分布对材料的性能优化和加工有重要意义。
总之,材料的形变和再结晶是材料科学中重要的研究领域。
通过研究形变和再结晶的机制和规律,可以优化材料的性能和加工过程,从而推动材料科学的发展和应用。
材料科学基础材料的变形和再结晶介绍
空位消失有四种可能的情况: (1) 空 位 迁 移 到 晶 体 的 自 由 表 面 或 界 面 而 消 失 。 (2)空位与塑性变形所产生的间隙原子重新结合而消 失。 (3)空位与位错发生相互作用而消失。 (4)空位聚集成空位盘然后崩塌成位错环而消失。
2.中温回复 进一步升高温度,内应力进一步消除,电阻率 继续下降。这一时期,位错运动而导致部分位错复 合消失(重新组合)。有时,这一时期不明显。
变形程度对再结晶晶粒尺寸的影响
加热温度与晶粒尺寸
5.3.4. 晶粒长大
再结晶结束后,材料的晶粒一般比较细小(等 轴晶 ) ,若继续升温或延长保温时间,晶粒会继 续长大。晶粒长大是一个自发过程。晶粒长大的 驱动力来自总的界面能的降低。 根据再结晶后晶粒长大特点,分为: (1)正常晶粒长大(normal grain growth):均 匀长大 (2)异常晶粒长大(abnormal grain growth): 不 均 匀 长 大 , 又 称 二 次 再 结 晶 (secondary recrystallization) ;把通常说的再结晶称为一次 再结晶(primary recrystallization)。
一些金属的再结晶温度
影响再结晶的因素
1.变形程度:变形度增大、开始TR下降,等温退 火再结晶速度越快;而大到一定程度, TR 趋 于稳定。 2.原始晶粒尺寸:其它条件相同时,金属原始晶 粒细小,则 TR 越低,同时形核率和长大速度 均增加,有利于再结晶。 3. 微量溶质原子:其作用一方面以固溶状态存在 于金属中,会产生固溶强化作用,有利于再 结晶;另一方面溶质原子偏聚于位错和晶界 处,起阻碍作用。总体上起阻碍作用,使TR 提高。
4.第二相粒子:其作用是两方面的,这主要取决 于分散相粒子大小与分布。第二相粒子尺寸 较大 , 间距较宽( >1 微米),促进再结晶。 第二相粒子尺寸较小且又密集分布时阻碍再 结晶形成。 5.退火工艺参数:加热速度过于缓慢或极快时, TR上升; 当变形程度和保温时间一定,退火温度越 高,再结晶速度快;在一定范围内延长保温 时间,TR降低。
材料的变形和再结晶

s
y
ez g xy
SS3411
S32 S42
S33 S43
S34 S44
S35 S45
S36 S46
s z t xy
g g
xz yz
S51 S61
64
S55 S65
金属在常温和低温下,其塑性变形的主要方式是滑移和孪生。
1 滑移系及临界分切应力定律
1、滑移现象
晶体的塑性变形并非均匀地发生于整个晶体中,而是一个不均匀的过程,当应力超过其 弹性极限后,晶体中就会产生层片之间的相对位移,即滑移。发生了滑移,使试样的抛光 面上产生了高低不一的台阶即滑移线,许多密集在一起的滑移线组成滑称带。
晶向,故滑移系数目为1×3=3个。
b. 当滑移面为 1 0 1 0 时,晶体中滑移面共有3个,每个滑移面上一个 1 1 2 0 晶向,故滑移系数目为3×1=3个。
c. 当滑移面为斜面 1 0 1 1 时,此时滑移面共有6个,每个滑移面上一
个 1 1 2 0 ,故滑移系数目为6×1=6个。
弹性模量与切变弹性模量之间的关系为:
G
E
2 1
式中,为材料泊松比,表示侧向收缩能力。一般金属材料的泊松比在 0.25~0.35之间,高分子材料则相对较大些。
弹性模量代表着使原子离开平衡位置的难易程度,是表征晶体中原子间结合 力强弱的物理量。金刚石一类的共价键晶体由于其原子间结合力很大,故其弹性 模量很高;金属和离子晶体的则相对较低;而分子键的固体如塑料、橡胶等的键 合力更弱,故其弹性模量更低,通常比金属材料的低几个数量级。
2、滑移系 晶体的滑移并不是任意的,通常是沿着一定的晶面发生的,此组晶面称为滑移面,滑移
材料科学基础重点总结4 材料形变和再结晶
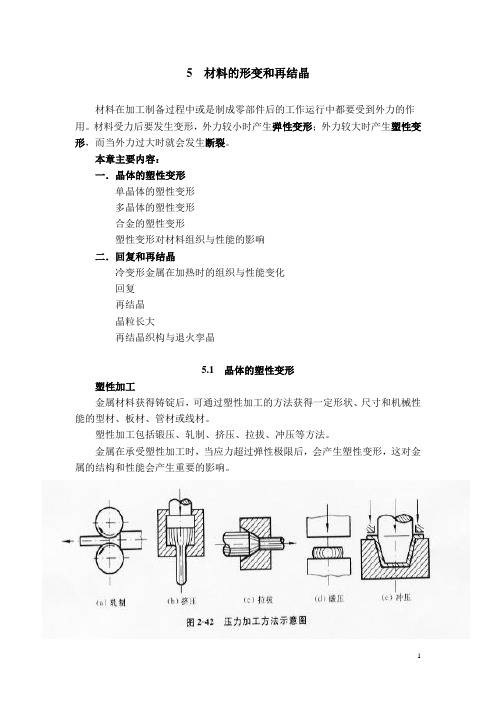
5 材料的形变和再结晶材料在加工制备过程中或是制成零部件后的工作运行中都要受到外力的作用。
材料受力后要发生变形,外力较小时产生弹性变形;外力较大时产生塑性变形,而当外力过大时就会发生断裂。
本章主要内容:一.晶体的塑性变形单晶体的塑性变形多晶体的塑性变形合金的塑性变形塑性变形对材料组织与性能的影响二.回复和再结晶冷变形金属在加热时的组织与性能变化回复再结晶晶粒长大再结晶织构与退火孪晶5.1 晶体的塑性变形塑性加工金属材料获得铸锭后,可通过塑性加工的方法获得一定形状、尺寸和机械性能的型材、板材、管材或线材。
塑性加工包括锻压、轧制、挤压、拉拔、冲压等方法。
金属在承受塑性加工时,当应力超过弹性极限后,会产生塑性变形,这对金属的结构和性能会产生重要的影响。
5.1.1 单晶体的塑性变形单晶体塑性变形的两种方式:滑移孪生滑移:滑移是晶体在切应力的作用下,晶体的一部分相对于另一部分沿着某些晶面和晶向发生相对滑动。
滑移线:为了观察滑移现象,可将经良好抛光的单晶体金属棒试样进行适当拉伸,使之产生一定的塑性变形,即可在金属棒表面见到一条条的细线,通常称为滑移线.滑移带:在宏观及金相观察中看到的滑移带并不是单一条线,而是由一系列相互平行的更细的线所组成的,称为滑移带。
滑移系:塑性变形时位错只沿着一定的晶面和晶向运动,这些晶面和晶向分别称为“滑移面”和“滑移方向”。
一个滑移面和此面上的一个滑移方向结合起来组成一个滑移系。
滑移的临界分切应力τk晶体的滑移是在切应力作用下进行的,但其中许多滑移系并非同时参与滑移,而只有当外力在某一滑移系中的分切应力达到一定临界值时,该滑移系方可以首先发生滑移,该分切应力称为滑移的临界分切应力。
滑移的特点晶体的滑移并不是晶体的一部分相对于另一部分同时做整体的刚性的移动,而是通过位错在切应力作用下沿着滑移面逐步移动的结果,因此实际滑移的临界分切应力τk 比理论计算的低得多。
(滑移面为原子排列最密的面)单晶体滑移时,除滑移面发生相对位移外,往往伴随着晶面的转动。
材料科学基础第五章材料的变形与再结晶

材料科学基础第五章材料的变形与再结晶材料的变形与再结晶是材料科学基础的重要课题之一,对于材料的使用性能和制备工艺有着重要的影响。
本文将从变形机制、再结晶机制以及变形与再结晶的关系等方面进行探讨。
材料的变形是指材料的形状、尺寸以及内部结构在受到外力作用下的改变。
变形可以分为弹性变形和塑性变形两类。
弹性变形是指材料在加载后可以恢复到原来的形状和尺寸,而塑性变形则是指材料在加载后不能恢复到原来的形状和尺寸。
材料的塑性变形主要是由于材料晶体结构中的位错导致的。
位错是指晶体中存在的局部的原子排列错误。
在加载时,外力作用在晶体上,使得晶体中的原子在位错的作用下发生滑移,从而导致整体的塑性变形。
再结晶是指材料在一定条件下,通过断裂和重结晶可以重新形成新的晶粒。
再结晶的机制主要是晶界和位错的动态行为。
晶界是指两个晶粒之间的界面,在塑性变形过程中,晶界可以通过重结晶来消除变形能量,从而保证材料的继续塑性变形。
变形和再结晶有着密切的关系。
塑性变形过程中,位错密度会不断增加,晶界也会发生移动和重新排列,从而改变了材料的晶粒形态和尺寸。
当位错密度达到一定程度时,晶界开始活动,晶粒开始长大,并且会形成新的晶粒,即再结晶发生。
再结晶可以消除塑性变形过程中的缺陷,并且通过晶界的活动实现晶粒尺寸的控制。
材料的变形与再结晶对材料的性能和制备工艺有着重要的影响。
塑性变形可以提高材料的强度和硬度,改善材料的力学性能。
再结晶可以改善材料的塑性变形能力,降低材料的应力集中和脆弱性,提高材料的韧性和延展性。
在材料制备过程中,变形和再结晶的控制对材料的组织和性能具有重要的意义。
合理的变形和再结晶工艺可以获得理想的材料微观结构,从而提高材料的使用性能。
总之,材料的变形与再结晶是材料科学基础中的重要内容。
通过对变形机制和再结晶机制的研究,可以了解材料的塑性变形和再结晶的机理,进而控制和调整材料的性能和组织。
这对于材料的应用和制备工艺都具有重要的意义。
材料科学 材料的变形与再结晶
一、冷变形后的组织结构
1. 晶粒沿变形方向伸长,形成纺锤状或纤维状。
2. 位错密度增加,位错聚集,形成位错缠节,晶粒内部被
分割破碎,形成胞状亚结构,位错集中在胞壁,或形
成位错网络。
3. 第二相或夹杂物沿变形方向拉长,形成流线或带状组织。
4. 晶粒发生转动,各晶粒的取向趋于一致,形成变形织构。
(1)变形织构
塑性变形后多晶体具有择优取向的结构称为变形织构。
(2)织构类型
•丝织构:各晶粒中某一晶向[uvw
uvw]]趋于平行力轴方向。
•板织构:各晶粒中某一晶面(hkl)趋于平行轧面,某一晶向[uvw
uvw]]趋于平行轧向。
(3)织构表示——极图。
材料科学基础重点总结4材料形变和再结晶

5 材料的形变和再结晶材料在加工制备过程中或是制成零部件后的工作运行中都要受到外力的作用。
材料受力后要发生变形,外力较小时产生弹性变形;外力较大时产生塑性变形,而当外力过大时就会发生断裂。
本章主要容:一.晶体的塑性变形单晶体的塑性变形多晶体的塑性变形合金的塑性变形塑性变形对材料组织与性能的影响二.回复和再结晶冷变形金属在加热时的组织与性能变化回复再结晶晶粒长大再结晶织构与退火孪晶5.1 晶体的塑性变形塑性加工金属材料获得铸锭后,可通过塑性加工的方法获得一定形状、尺寸和机械性能的型材、板材、管材或线材。
塑性加工包括锻压、轧制、挤压、拉拔、冲压等方法。
金属在承受塑性加工时,当应力超过弹性极限后,会产生塑性变形,这对金属的结构和性能会产生重要的影响。
5.1.1 单晶体的塑性变形单晶体塑性变形的两种方式:滑移孪生滑移 :滑移是晶体在切应力的作用下,晶体的一部分相对于另一部分沿着某些晶面和晶向发生相对滑动。
滑移线:为了观察滑移现象,可将经良好抛光的单晶体金属棒试样进行适当拉伸,使之产生一定的塑性变形,即可在金属棒表面见到一条条的细线,通常称为滑移线.滑移带:在宏观及金相观察中看到的滑移带并不是单一条线,而是由一系列相互平行的更细的线所组成的,称为滑移带。
滑移系:塑性变形时位错只沿着一定的晶面和晶向运动,这些晶面和晶向分别称为“滑移面”和“滑移方向”。
一个滑移面和此面上的一个滑移方向结合起来组成一个滑移系。
滑移的临界分切应力τk晶体的滑移是在切应力作用下进行的,但其中许多滑移系并非同时参与滑移,而只有当外力在某一滑移系中的分切应力达到一定临界值时,该滑移系方可以首先发生滑移,该分切应力称为滑移的临界分切应力。
滑移的特点晶体的滑移并不是晶体的一部分相对于另一部分同时做整体的刚性的移动,而是通过位错在切应力作用下沿着滑移面逐步移动的结果,因此实际滑移的临界分切应力τk 比理论计算的低得多。
(滑移面为原子排列最密的面)单晶体滑移时,除滑移面发生相对位移外,往往伴随着晶面的转动。
北京科技大学材料科学基础A第5章-材料的形变与再结晶(2)

第五章材料的形变与再结晶
2
第五节 孪生及扭折
滑移是形变的主要形式,孪生及扭折也是形变的不同形式。 一、孪生 孪生━ 孪生━晶体受力后,以产生孪晶的方式而进行的切变过程, 称为孪生。 孪晶━ 孪晶━以共格界面相联结,晶体学取向成镜面对称关系的 这样一对晶体(或晶粒)的合称。
晶体受到切应力后,沿着一定的晶面 (孪生面) 和一定的晶向(孪生方向) 在 孪生面) 和一定的晶向(孪生方向) 一个区域内发生连续的顺序的切变。
2. 形变引起的各向异性 金属和合金多晶体经方向性的形变后,力学性能和物理性能方 面都会出现各向异性现象。 各向异性的产生: 组织方向性 宏观偏析、微观偏析、异相晶粒、杂质等 发生方向性分布; 结构方向性 晶粒取向转动、晶体结构择尤取向, 出现织构。 3. 其它物理性能变化 结构敏感的性能(导磁率、磁饱和度、电阻) 结构敏感的性能(导磁率、磁饱和度、电阻) 明显变化 结构不敏感的性能(比重、导热性、弹性模量) 结构不敏感的性能(比重、导热性、弹性模量) 有一定影响
11
第六节 多晶体的范性形变
四、晶体的转动与形变织构
单晶体形变时,作用滑移系要发生转动: 拉伸时,作用滑移系趋于与力轴平行; 压缩时,作用滑移系趋于与力轴垂直。 多晶体在单向受力条件下形变时,各作用滑移系都有转向 与力轴平行(拉伸时)或垂直(压缩时)的总趋势。 当形变程度相当大时,多晶体会出现择尤取向,产生形变 织构。即大部分(或相当一部分)晶粒之间至少有一 个晶向相互平行或接近平行。
9
第六节 多晶体的范性形变
三、晶粒大小对形变的影响
1. 晶粒越小,试样单位横截面上晶粒的数量越多, 形变的抗力越大:
σS = σ0 + Kyd −1/ 2
晶粒的平均直径 表征晶界对形变的影响 屈服应力 屈服强度 表示晶内对形变的抗力, 约相当于单晶体τ 约相当于单晶体τk的2~3倍
学生用材料科学基础第5章

金属、陶瓷和部分高分子材料不论是加载或卸载时, (2) 金属、陶瓷和部分高分子材料不论是加载或卸载时,只要在 弹性变形范围内,其应力与应变之间都保持单值线性函数关系, 弹性变形范围内,其应力与应变之间都保持单值线性函数关系, 即服从虎克(Hooke)定律。 即服从虎克(Hooke)定律。 弹性变形量随材料的不同而异。 (3) 弹性变形量随材料的不同而异。
5.1 弹性变形
5.1.1 弹性变形的本质
定义: 定义: 外力去除后能够完全恢复的那部分变形。 外力去除后能够完全恢复的那部分变形。 从原子间结合力的角度来了解它的物理本质。
当原子受力后将偏离其平衡位置,原子 间距增大时将产生引力;原子间距减小 时将产生斥力。这样,外力去除后,原 子都会恢复其原始位置。 弹性变形
b. 滑移系 •滑移时,滑移面与滑移方向并不是任意的。 •滑移面应是面间距最大的密排面,滑移方向是原子的最密排 方向,此时滑移阻力最小。 一个滑移面和此面上的一个滑移方向合起来叫做一个滑移系。
晶体结构 面心立方 体心立方 密排六方 滑移面 {111} {110} {112} {123} 六方底面 滑移方 向 <110> <111> 底面对 角线 滑移系数 目 4×3=12 6×2=12 1 × 3 =3
圆柱形单晶体
τk σs = = m cos ϕ cos λ
1 m = cos λ cos ϕ = cos ϕ cos(90° − ϕ ) =取向因子达到最大值(0.5) σs最小,即用最小的拉应
力就能达到τk。
取向因子大的为软取向, 取向因子大的为软取向, 软取向 取向因子小的为硬取向。 取向因子小的为硬取向。 硬取向
强化机制
对于具有较多滑移系的晶体而言,除多系滑移 外,还常可发现交滑移现象,即两个或多个滑 移面沿着某个共同的滑移方向同时或交替滑移。 交滑移的实质是螺位错在不改变滑移方向的前 提下,从一个滑移面转到相交接的另一个滑移 面的过程,可见交滑移可以使滑移有更大的灵 活性。
第7章材料的变形与再结晶精品PPT课件
卸载
ε
加力 去力
t
7
实际金属
不加应力也应变
σ
去应力
ε
滞弹性应变
后降低
b
εan a
O
Ca
随时间延续回到O
ε
H
ε0
O
随时间延续回到O
c d
t
这种在弹性极限范围内,应变滞后于外加应
力,并和时间有关的现象称为弹性后效。
2020/10/13
8
(3) 弹性滞后
由于应变落后于应力,在σ-ε曲线上使加载线与卸载
2020/10/13
21
滑移的位错机制
晶体滑移并不是晶体的一部分相对于另一 部分沿着滑移面作刚性整体位移,而是借助位 错在滑移面上的运动来逐步进行的。当移动到 晶体外表面时,晶体沿其滑移面产生了位移量 为一个b的滑移。
材料科学基础
Fundamentals of Materials Science
第7章 材料的变形与再结晶
Chapter 7 Deformation and recrystallization of materials
7.1 弹性变形 7.2 晶体塑性变形 7.3 回复和再结晶 7.4 金属的热加工 小结 思考题
切应力作用下晶体滑移示意图(微观)
2020/10/13
12
滑移的特点:1) 滑移后,晶体的点阵类型不变; 2) 晶体内部各部分位向不变;3) 滑移量是滑移 方向上原子间距的整数倍;4) 滑移后,在晶体表 面出现一系列台阶,见图6.4 。
滑移线(小台阶) 滑移量
滑移块 滑移带(一组小台阶)
2020/10/13
13
滑移系
一个滑移面和此面上的一个滑移方向合起来称 为一个滑移系,可用{hkl}<uvw>来表示,见图6.5。
材料科学基础 第6章 材料的塑性变形与再结晶
两三个晶粒的拉伸试验表明:晶界处 的变形能力差,呈竹节状
2)晶界对材料的强化作用机理
晶界对材料的强化作用是通过晶界对位错 的阻塞作用实现的。塑性变形是通过位错在滑 移面上的滑移产生的,晶界可以阻止位错的滑 移,因此位错在晶界处形成阻塞,位错处阻塞 位错的数量越多,对位错源形成位错的反作用 力越大,当增大的某一数值,位错源停止形成 新的位错,因此滑移面停止进行,要使相邻晶 粒发生滑移须增大外应力,以启动其位错源动 作。这就是晶界的强化作用。
滑移方向 〈110〉 〈110〉
〈111〉
〈111〉 〈111〉 〈111〉 〈111〉 〈1120〉 〈1120〉 〈1123〉 〈1120〉 〈1120〉 〈1010〉 〈1120〉 〈1120〉 〈1120〉 〈1120〉
3.位错滑移时受到的点阵阻力
由于原子排列的周 期性,位错在滑移过程 中,位错中心的能量将 发生周期性变化,当位 错从位置1移动到位置2 时需要越过一个势垒, 即阻力,其大小如右图 所示。
切应力
2.晶体结构引起的加工硬化曲线的差异
6.1.2多晶体的塑性变形
通常使用的材料多为多晶材料,多晶材料变形 有以下特点: ①每个晶粒的变形行为方式与其单晶相同; ②每个晶粒的变形受其周围晶粒的影响;主要涉及 到晶粒之间的方位及取向关系; ③整个材料体的变形是通过各晶粒变形相互配合与 协调实现的。 因此多晶材料的屈服强度明显高于同类材料的 单晶体;并且晶粒越细,强度越高。
0 10 20 40 60 80 276 497 566 593 607 662
抗拉强度 (Mpa)
456 518 580 656 704 792
延伸率 断面收缩率 (% ) (% )
34 20 17 16 14 7 70 65 63 60 54 26
材料科学基础第五章 材料的变形与再结晶
ψ=(Fo-Fk)/ Fo×100%
2、塑性的实际意义
• 金属材料的塑性指标是安全力学性能指标;
• εf –材料均匀变形的能力。
此时,外力对两个滑移系的取向因子完全相同。
• 具有多滑移系的晶体,除多系滑移外, 还可发生交滑移
(cross-slip)
• bcc结构中最易发生交滑移。
(6)滑移中的位错机制
• 滑移是借助于位错在滑移面上运动来逐步进行的;
晶体的滑移必在一定外力作用下才能发生,说明位
错运动要克服阻力,该阻力来自点阵阻力,称为派
纳P—N力,其大小为: • ηP-N = 2Gexp(-2пW/b)/(1-ν) ηP-N与位错的宽度W 呈指数关系,滑移面间距d增大,w[=d /(1-ν)]增大, 或滑移方向上原子间距b减小,则ηP-N下降,滑移阻
力小, 滑移容易进行。
刃位错的滑移示意图
刃位错的滑移模型
螺位错的滑移模型
2.孪生
第五章 材料的变形和再结晶
概
一、 机械性能(力学性能)
述
1. 定义:材料承受外力作用的能力。 2. 机械性能四大指标: 强度、硬度、塑性、韧性。 3.实验 通过实验可以测出相应的机械性能指标, 最常见的是拉伸实验、硬度实验和冲击实验。
二、拉伸试验
⑴ 实验设备
拉伸试验的现场录像
材料试验机。 ⑵ 拉伸试样 圆试样 长试样 扁试样 短试样 ⑶ 拉伸过程
• 根据拉伸试验研究表明,金属在外力作用下一般经历三个阶段:
弹性变形(elastic deformation) 塑性变形(plastic deformation) 断裂(fracture)
814材料科学基础-第五章 材料的形变和再结晶知识点讲解

北京科技大学材料科学与工程专业814 材料科学基础主讲人:薛春阳第五章材料的形变和再结晶本章主要内容1.弹性和黏弹性2.晶体的塑性变形3.回复和再结晶4.热变形和动态回复、动态再结晶5.陶瓷形变的特点本章要求1.了解弹性和黏弹性的基本概念2.熟悉单晶体的塑性变形过程3.熟悉多晶体的塑性变形过程4.掌握塑性变形对材料组织和性能的影响5.掌握回复和再结晶的概念和过程6.熟悉动态回复和动态再结晶的概念和过程7.了解陶瓷变形的特点和一些基本概念应变应力b σsσe σbk s e ob εk ε变形的五个阶段:1.弹性变形2.不均匀的屈服变形3.均匀的塑性变形4.不均匀的塑性变形5.断裂阶段抗拉强度屈服强度弹性极限知识点1 弹性的不完整性定义:我们在考虑弹性变形的时候,通常只是考虑应力和应变的关系,而没有考虑时间的影响,即把物体看作是理想弹性体来处理。
但是,多数工程上应用的材料为多晶体甚至为非晶体,或者是两者皆有的物质,其内部存在着各种类型的缺陷,在弹性变形是,可能出现加载线与卸载线不重合、应变跟不上应力的变化等有别于理想弹性变形的特点的现象,我们称之为弹性的不完整性。
弹性不完整的现象主要包括包申格效应、弹性后效、弹性滞后、循环韧性等1.包申格效应材料预先加载才生少量的塑性变形(4%),而后同向加载则 升高,反向加载则 下降。
此现象称之为包申格效应。
它是多晶体金属材料的普遍现象。
2.弹性后效一些实际晶体中,在加载后者卸载时,应变不是瞬时达到其平衡值,而是通过一种弛豫过程来完成其变化的。
这种在弹性极限 范围内,应变滞后于外加应力,并和时间有关的现象,称之为弹性后效或者滞弹性。
3.弹性滞后由于应变落后与应力,在应力应变曲线上,使加载与卸载线不重合而是形成一段闭合回路,我们称之为弹性滞后。
弹性滞后表明,加载时消耗于材料的变形功大于卸载时材料恢复所释放的变形功,多余的部分被材料内部所消耗,称之为内耗,其大小用弹性滞后环的面积度量。
材料科学基础第五章材料的形变和再结晶

应力
b
a
a'
应变
0
0 c
时间
an
三、弹性滞后
应变落后于应力,-曲线上加载线与卸载线不再是一条 直线,而是形成一封闭回线 表明加载时消耗于材料的变形功大于卸载时材料恢复所释 放的变形功,多余的部分被材料内部所消耗,称之为内耗, 其大小即用弹性滞后环面积度量。
功
5.1.4 粘弹性(高分子材料)
1、粘弹性:一些非晶或多晶体,在比较小的应力 时可以同时表现出粘性和弹性。
广义的胡克定律:
x
y
C 11 C 21
C 12 C 22
C 13 C 23
C 14 C 24
C 15 C 25
C C
16 26
x y
z xy
C C
31 41
C 32 C 42
C 33 C 43
C 34 C 44
C 35 C 45
C C
36 46
z xy
xz yz
5.1.2 弹性变形的本质
原子、离子间的相互作用力:
平衡位置r0,系统的能量最低 受外力偏离平衡位置,有变形,产生引力或斥力, 能量升高
当外力消失,原子将恢复到平衡位置,变形完全消 失,能量下降
E
斥 力 r0
引力
r
5.1.3 弹性的不完整性
理想的弹性体:
E
理想的弹性体是不存在的,可能出现加载线与
当应力达到一定的大小时,晶体中一定方向的层片 之间就会产生的相对滑移,大量的层片间滑动的累 积,就成为宏观塑性变形。
S 32 S 42
S 33 S 43
S 34 S 44
xz yz
S
51
材料科学基础第五章1.1
抗拉强度
屈服强度 弹性极限
低碳钢ζ—ε曲线
静拉伸示意图
载荷-伸长曲线
真应力-应变曲线(考虑动态截面积的变化)
不同材料,其应力-应变曲线不同,如:
屈服强度(σ0.2) :有的金属材料的屈服点极不明显 ,在测量上有困难,因此为了衡量材料的屈服 特性,规定产生永久残余塑性变形等于一定值( 一般为原长度的0.2%)时的应力,称为条件屈服 强度或简称屈服强度σ0.2
d 式中ζ为应力;dt
一些非晶体,有时甚至多晶体,在比较小的应 力时可以同时表现出弹性和粘性,这就是粘弹性现 象。 粘弹性变形的特点是应变落后于应力。当加上 周期应力时,应力—应变曲线就成一回线,所包含 的面积即为应力循环一周所损耗的能量,即内耗。
5.2晶体的塑性变形 应力超过弹性极限,材料发生塑性变形,即产 生不可逆的永久变形。 5.2.1单晶体的塑性变形 在常温和低温下,单晶体的塑性变形主要通过 滑移方式进行的,此外,尚有孪生和扭折等方式。 1.滑移
纳米铜的室温超塑性
一、概述
金属的应力—应变曲线 金属在外力作用下一般经历弹性变形(elastic deformation)、弹塑性变形(plastic deformation)和断裂(fracture)三个阶段。
1.工程应力一应变曲线
工程应力一应变(ζ-ε)曲线: ζ= P/Ao ε= (L-Lo)/ Lo P—为载荷 Ao—原始试样的截面积 L、Lo—变形后和变形前试样的长度 低碳钢ζ—ε曲线如图5.1(P151)
1.包申格效应 材料经预先加载产生少量塑性变形(小于4%), 而后同向加载则e升高,反向加载则e下降。此现 象称之为包申格效应。它是多晶体金属材料的普遍 现象。
实际材料T10钢的包辛格效应
材科基5 材料的变形和再结晶(2)

再结晶的形核不是新相,其晶体结构没有改变。
1 形核机22
第八节 再结晶
1 形核 1)晶界弓出形核机制
变形量较小时(<20%),晶界凸出形核。晶界处A 晶粒某些亚晶粒通过晶界弓出迁移而凸向亚晶粒小的 方向,以吞食B晶粒中亚晶的方式形成无畸变的再结晶 形核。
23
2)亚晶形核机制 一般发生在冷变形度大时.分为: 亚晶合并机制和亚晶迁移机制。 ①亚晶合并机制,适于变形量大的高层错能金属.
亚晶边界上的位错网络通过解离、拆散、以及位错的滑移和 攀移,转移到周围其它晶界上,导致亚晶边界的消失和合并。
合并后的亚晶尺寸增大,以及亚晶界位错密度增加(因为位 错数量不减少但是转移到周围其他位错处),相临位错取向增大, 转化为大角度晶界,具有大的迁移速率,能清除移动过程中的位 错,使它后面留下无畸变的晶体,成为形核的核心。
构缺陷衰减速率,是缺陷浓度和缺陷迁移率的函数,仿照化学动
力学的方法,可以用一级化学反应速度方程来表达:
dCP dt
ACP
exp
Q RT
则(2)式变为:
d(P dt
P0 )
KcP
A exp
Q RT
d(P
将(1)式代入: dt
P0 )
K
P
P0 K
A
exp
Q RT
13
得: d (P P0 ) A exp Q dt 或 dx A exp Q dt
状和尺寸。
4
第六节 冷变形金属在加热时的 组织与性能变化
二 显微组织变化(示意图)
Smith W F. Foundations of Materials
Science and Engineering.
材料科学基础-变形与再结晶

向原 弹子 性非 模密 量排 低方
5
第五章
材料的变形与再结晶
★ 一般地,金属(多孔金属除外)的弹性模量对组织不敏感; ★ 陶瓷材料的弹性模量对组织敏感。
晶体相 玻璃相
泡沫铝
BN-AlN陶瓷(助烧剂Y2O3)
问题: ①Fe的熔点为1538℃,Cu的熔点为1080℃,那一个的弹性模量更高? ②细化晶粒可以提高金属的强度,可以提高其弹性模量吗?
外力 f 0
r0
r 原子间作用力 与其间距关系
吸引力 排斥力 du/dr=0
r
外力
3
第五章
材料的变形与再结晶
二、弹性变形特征和弹性模量
1、普弹性(能弹性)变形 大多数情况下,金属、无机非金属晶体材料的弹性变形都表现 为普弹性变形。
(1)变形特征:
①变形是完全可逆的。 ②应变与应力能瞬时达到平衡,且满足:σ=Eε和τ=Gγ
第五章
材料的变形与再结晶
第五章 材料的形变与再结晶
1
第五章
材料的变形与再结晶
变形:物体尺寸或形状发生改变。 变形分类: 弹性变形:变形量仅是应力函数,且可以自动恢复的变形。
塑性变形:变形量仅是应力函数,且不能自动恢复的变形。 粘弹性变形:变形量是应力和时间函数,兼有可逆和不可逆变形特 征的变形。
变形产生的原因: 在外力作用下,物体内部原子、离子或分子之间的相对空间位 置或分子形态(高分子)发生了改变。
分切向力
N
T
则外力在滑移面上沿滑移方向的分 切应力为:
F r A
Fr F cos F cos cos A A0 / cos A0 cos cos
cos cos 称为施密特因子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对于冷变形较大的晶体,再结晶形核优先地发 生于多边化区域,这些区域就是位错塞积而导致点 阵强烈弯曲的区域。因此,对这类晶体多边化是再 结晶形核的必要准备阶段。再结晶晶核通过亚晶界 的迁动吞并相邻的形变基体和亚晶而生长,或是通 过两亚晶之间亚晶界的消失使两相邻亚晶粒合并而 生长。
再结晶温度 再结晶温度(recrystallization temperature): 冷变形金属开始进行再结晶最低温度。 测定方法:金相法 硬度法 实际生产上确定方法: 一般TR = (0.35-0.40)Tm
二、回复机制 回复机制随回复退火温度而异,有下面几种。 1.低温回复 经冷加工变形的金属通常在较低的温度范围就 开始回复。表现在因变形而增多的电阻率发生不同 程度的下降,而机械性能基本保持不变。电阻率对 点缺陷很敏感,机械性能对点缺陷不敏感。因此,低 温下回复和金属中点缺陷变化有关。研究结果表明 :低温回复主要是塑性变形所产生的过量空位消失 的结果。
再结晶后晶粒大小
再结晶晶粒的平均直径 d与形核率及长大速度之间 的关系如:式5.30。 影响再结晶后晶粒大小的因素: 1. 变形程度的影响 变形度很小时,晶粒尺寸为原始晶 粒尺寸;临界变形度(critical deformation degree)εc 时,晶粒特别粗大,一般金属εc =2-8% ;当变形度大 于εc时,随变形度增加,晶粒逐渐细化。 2. 退火温度 T升高,再结晶速度快,εc值变小。 3. 原始晶粒尺寸 当变形度一定时,原始晶粒越细,D 越小。 4. 微量溶质原子和杂质元素 一般都能起细化再结晶晶 粒的作用。
二、再结晶的形核与长大 再结晶过程是形核和长大,但无晶格类型变化。 1. 形核 再结晶晶核是现存于局部高能区域内的,以多边 化形成的亚晶为基础形核。其形核机制有: (1)凸出形核机制 对于变形度较小(<20%)的 金属, 以凸出形核机制形核,弓出形核时所需 能量条件为: △Es≧2γ/L
(2) 亚晶形核 对于变形度较大的金属,再结果形核往往采用这 种方式。 亚晶核核方式有:1. 亚晶合并机制:在变形度 大且具有高层错能的金属中。 2. 亚晶迁移 (boundary migration)机制:在变形度大,而层错 能低的金属中。
3.高温回复 高温回复是指温度在0.3Tm附近的退火过程。 通常称为回复后期。这时,除内应力、电阻率下降 外,主要表现在硬度大幅度下降。一般认为,这一 时期空位和位错进一步消除,发生多边化和亚晶长 大。在高温回复过程中非常重要的一个概念就是: 多边化。
多边化机制 冷变形后的晶体,由于同号刃位错在滑移面上 的塞积而造成点阵弯曲。退火过程中,刃位错通过 滑移和攀移,使同号位错沿垂直于滑移面的方向排 列,从原子排列的效果看,这类似于我们在学习晶 界时学过的小角晶界模型,因此我们把这种整齐排 列的位错结构看成是小角度亚晶界。这一过程被称 为多边化。 多边化的结果就象在变形晶体中产生规则的亚晶粒。 多边化过程进一步进行,两个或更多的亚晶界聚合。 亚晶界合并,即所谓的亚晶粒长大。因为多边化过 程涉及到位错的攀移,因此,多边化在低温下很难 发生。
4.第二相粒子:其作用是两方面的,这主要取决 于分散相粒子大小与分布。第二相粒子尺寸 较大 , 间距较宽( >1 微米),促进再结晶。 第二相粒子尺寸较小且又密集分布时阻碍再 结晶形成。 5.退火工艺参数:加热速度过于缓慢或极快时, TR上升; 当变形程度和保温时间一定,退火温度越 高,再结晶速度快;在一定范围内延长保温 时间,TR降低。
4. 影响因素
(1) 温度 T 升高,晶粒长大速度也越快,越易粗化。 (2) 分散相微粒 当合金中存在第二相微粒时,粒子对 晶界的阻碍作用使晶粒长大速度降低。 利用分散微粒阻碍高温下晶粒的长大,已广泛应用 于金属材料和非金属材料中,如:①钢中加入V、Ti、 Nb等 ,可形成 TiN、TiC、 VC、 NbC、 VN、 NbN等粒 子有效阻碍高温下钢的晶粒长大;②在陶瓷烧结中也 常利用分散相微粒防止晶粒粗化。 (3)晶粒间位向差 一般小角度晶界或具有孪晶结构 的晶界迁移速度很小;大角度晶界迁移速度一般较快。 (4)杂质与微量元素 阻碍晶界的迁移。
一些金属的再结晶温度
影响再结晶的因素
1.变形程度:变形度增大、开始TR下降,等温退 火再结晶速度越快;而大到一定程度, TR 趋 于稳定。 2.原始晶粒尺寸:其它条件相同时,金属原始晶 粒细小,则 TR 越低,同时形核率和长大速度 均增加,有利于再结晶。 3. 微量溶质原子:其作用一方面以固溶状态存在 于金属中,会产生固溶强化作用,有利于再 结晶;另一方面溶质原子偏聚于位错和晶界 处,起阻碍作用。总体上起阻碍作用,使TR 提高。
再结晶过程不是相变,它是一种组织变化。再 结晶的形核是如何产生的? 事实上,再结晶的形核与冷变形程度有关,当 冷变形程度较小(如<20%),一般采用所谓的弓出 形核机制来描述。晶界凸出形核,形核以后,晶粒 凸向亚晶粒小的方向生长。 我们知道再结晶的驱动力是晶体的弹性畸变能 ,因此,预期晶核必然是产生在高畸变能的区域。 晶核的出现对体系的能量有两方面的影响: (1)新晶核形成使得晶体的畸变能降低。 (2)新晶核形成时由于界面的增加而带来界面能 的增加。
再结晶是一个显微组织重新改组,变形 储存能充分释放,性能显著变化的过程,其驱 动力为回复后未被释放的变形储存能。 再结晶形成的新晶粒仍是原来的晶体结 构,但取向与形变晶粒完全不同。经过再结 晶过程,塑性变形所导致的各种性能的改变 都消失。
1.再结晶的实验规律 (1)、变形量低于临界变形量时,则不能发生 再结晶。 (2)、变形程度越大,再结晶开始的温度越低。 (3)、增加退火时间可以降低再结晶所需要的 温度。 (4)、再结晶最终的晶粒大小主要取决于变形 程度,其次取决于退火温度。一般变形越大, 退火温度越低,晶粒尺寸越小。
变形程度对再结晶晶粒尺寸的影响
加热温度与晶粒尺寸
5.3.4. 晶粒长大
再结晶结束后,材料的晶粒一般比较细小(等 轴晶 ) ,若继续升温或延长保温时间,晶粒会继 续长大。晶粒长大是一个自发过程。晶粒长大的 驱动力来自总的界面能的降低。 根据再结晶后晶粒长大特点,分为: (1)正常晶粒长大(normal grain growth):均 匀长大 (2)异常晶粒长大(abnormal grain growth): 不 均 匀 长 大 , 又 称 二 次 再 结 晶 (secondary recrystallization) ;把通常说的再结晶称为一次 再结晶(primary recrystallization)。
加热时冷变形金属显微组织发生变化
(a)黄铜冷加工变形量达到CW=38%后 的组织 (b)经580ºC保温3秒后的组织
白色小的颗粒(再结晶出的新的晶粒)
(c)580ºC保温4秒后的金相组织 (d)580ºC保温8秒后的金相组织
完成了再结晶
(e)580ºC保温15分后的金相组织 (f)700ºC保温10分后晶粒长大的的金相组织
空位消失有四种可能的情况: (1) 空 位 迁 移 到 晶 体 的 自 由 表 面 或 界 面 而 消 失 。 (2)空位与塑性变形所产生的间隙原子重新结合而消 失。 (3)空位与位错发生相互作用而消失。 (4)空位聚集成空位盘然后崩塌成位错环而消失。
2.中温回复 进一步升高温度,内应力进一步消除,电阻率 继续下降。这一时期,位错运动而导致部分位错复 合消失(重新组合)。有时,这一时期不明显。
(一)晶粒正常长大
1. 晶粒长大的方式:长大是通过大晶粒吞食小晶 粒,晶界向曲率中心的方向移动进行的。 2. 驱动力:来源于晶界迁移后体系总的自由能的 降低,即总的界面能的降低。也即晶界凸侧晶粒 不断长大,凹侧晶粒不断缩小。 3. 晶粒大小: 在恒温下发生正常晶粒长大时,平均 晶粒直径随保温时间的平方根而增大。
回复 一、回复过程 回复是加热退火的第一阶段。回复可以通过两 种不同的热处理方式来实现。 一是从较低的温度连续加热到较高温度,即连 续加热退火。 另一种是在恒定温度下加热保温,即等温退火 。 在回复阶段,冷变形金属中的宏观内应力大部 分消除,而硬度、强度等基本不变。
具体观察到以下几种现象: (1)宏观内应力经过低温加热(一般在200~250℃) 后大部分去除,而微观应力仍然残存。 (2)电阻率降低。 (3)硬度的变化与具体的金属有关,如密排六方 金属Zn,Cd等,在很低的温度甚至是室温,硬度 基本恢复到变形前的水平,而面心、体心等金属如 Cu,Fe在低温时硬度没有明显的变化,直到比较高 的温度时硬度才比较多的下降。 (4) 显微组织,在光学显微镜下观察不到明显的 变化,高温回复时,在电镜下可看到晶粒内的胞状 位错结构转变为亚晶粒。
第五章(III)
回复和再结晶
金属在塑性变形后,无论在结构或性 能上都发生明显地变化。
(1)结构方面 晶粒形状变化——沿变形方向伸长; 晶粒内产亚结构;晶粒择优取向。 (2)性能方面 强度、硬度上升,塑性下降;电阻率 增加;导热性下降;扩散率增加;内应力增加(有 三种类型内应力:宏观内应力、微观内应力、点阵 畸变)。 更重要的是晶体变形后,体系处于热力学上的 高能态,是热力学不稳定的。
再结晶温度与变形量的关系
2.再结晶的开始温度 再结晶过程受温度、时间、变形量、原始晶粒 尺寸等因素影响。要精确判断再结晶的开始温度是 很困难的,通常采用以下几种方法: (1)测量金属退火后 (60分钟 )硬度的变化,将变 化50%时的温度定为再结晶温度。 (2)用金相显微镜观察到出现第一个晶粒时对应 的温度定为再结晶温度。 (3)用X射线观察出现第一个清晰的斑点,将此 时的温度称为再结晶温度。
多边化过程示意图
多边化产生的条件: (1) 塑性变形使晶体点阵发生弯曲。 (2) 在滑移面上有塞积的同号刃型位错。 (3) 需加热到较高温度使刃型位错能产生攀移运 动。
再结晶 一、再结晶的现象 冷变形晶体在回复过程中性能的变化是一个渐 变过程,组织结构没有明显的变化,而进一步提高 退火温度,达到某一临界值,就可以看到力学性能 和物理性能的急剧变化,加工硬化完全消除。性能 可以恢复到冷变形前的状态,显微组织也发生了明 显的改变,由拉长了的纤维状组织变成等轴晶粒。 这个过程就是再结晶。 再结晶是形变金属加热到一定温度后形成新的 无畸变晶粒并消耗掉冷加工的畸变晶粒而形核和长 大的过程。