机器人现场编程-川崎机器人IO信号的连接 共19页
机器人现场编程-川崎机器人IO信号的连接
2)不使用“外部暂停” 在 1TR 板的端子块连接器 X9 连接器上,将引脚 7-8 跳接。
5. 示教/再现(硬件输出信号) 此信号从 1TR 板端子块连接器 X8 的引脚 9-10 上输出。
6. 错误发生(硬件输出信号) 此信号由 1TR 板端子块连接器 X8 的引脚 11 与 12 向外部输出错误出现,
川崎工业机器人I/O信号的连接
一、I/O信号的连接
• 川崎RS10L工业机器人的硬件专用信号连
接到E20控制器的1TR 板的端子块上
(X7、X8、X9连接器)。
• 川崎RS10L工业机器人的通用信号(包括 软件专用信号)连接到E20的由控制器中
的 1TW 板处的连接器上(CN2、
CN4连接头)。
E20控制器内部结构
是个触点信号。
一、I/O信号的连接-通用信号的连接
• 通用输入/输出信号(包括软件专用信号),由控制器中的 1TW 板处理。
1)外部输入信号(外部→机器人)
1TW板 CN4连接器提供32 个输入信号,有两个由外部提供的 24V 的公 共连接:CN4 的引脚 18 和引脚 19。地线与外部电源相连,输入 24V (1GW)或 0V(1HW)。每个公共分别给 CN4 中的引脚 1-16 以及引脚 20-35 连接的 16 个通道提供电源。外部输入信号与这些引脚相连。
将 1TR 板 X9 连接器端子块的引脚 1-2 开路,将引脚3-4短接,接线方 法如图所示。
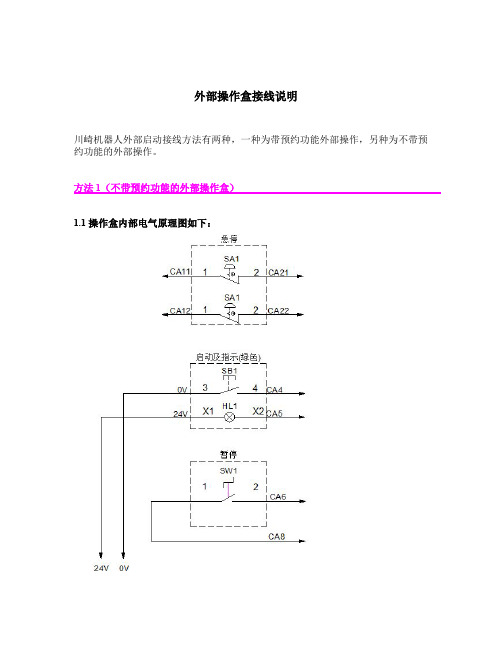
2. 外部马达电源ON 1)使用“外部马达电源 ON”时的连接 短接 1TR 板端子块连接器 X9 的引脚 5-6,开启马达电源至 ON。在连
接器 X9 上的引脚 5和 6 之间连接一个开关或继电器触点。须使用脉冲信号, 不允许一直闭合。
工业机器人现场编程(川崎) 任务工单2-工业机器人手动操作
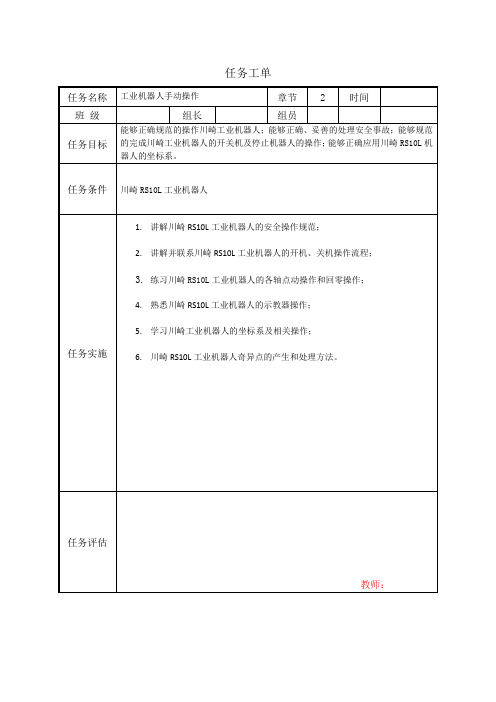
3.练习川崎RS10L工业机器人的各轴点动操作和回零操作;
4.熟悉川崎RS10L工业机器人的示教器操作;
5.学习川崎工业机器人的坐标系及相关操作;
6.川崎RS10L工业机器人奇异点的产生和处理方法。
任务评估
教师:
任务工单
任务名称
工业机器人手动操作Байду номын сангаас
章节
2
时间
班 级
组长
组员
任务目标
能够正确规范的操作川崎工业机器人;能够正确、妥善的处理安全事故;能够规范的完成川崎工业机器人的开关机及停止机器人的操作;能够正确应用川崎RS10L机器人的坐标系。
任务条件
川崎RS10L工业机器人
任务实施
1.讲解川崎RS10L工业机器人的安全操作规范;
机器人现场编程-川崎机器人IO信号的连接19页PPT

2. 外部马达电源ON 1)使用“外部马达电源 ON”时的连接 短接 1TR 板端子块连接器 X9 的引脚 5-6,开启马达电源至 ON。在连
接器 X9 上的引脚 5和 6 之间连接一个开关或继电器触点。须使用脉冲信号, 不允许一直闭合。
2)不使用“外部马达电源 ON”时的连接 断开 1TR 板端子块连接器 X9 的引脚 5-6,在这两个引脚之间不连任
4. 外部暂停 1)使用“外部保持” 将 1TR 板端子块连接器 X9 的引脚 7-8 上的跳接线去除,按下图连接
外部暂停触点。此触点开路时,机器人将暂停。
2)不使用“外部暂停” 在 1TR 板的端子块连接器 X9 连接器上,将引脚 7-8 跳接。
5. 示教/再现(硬件输出信号) 此信号从 1TR 板端子块连接器 X8 的引脚 9-10 上输出。
三、课程预告
川崎工业机器人I/O信号的应用实例
The End!
谢谢
图所示连接安全围栏的开关触点。
2)不使用“安全围栏输入”时的连接 将1TR 板的端子块连接器 X8 的引脚 1-2,3-4跳线。
(3)外部触发开关输入(仅在示教模式下有效) 1)使用“外部触发开关输入”(使用2 个安全回路)
2)不使用“外部触发开关输入” 将 1TR 板端子块连接器 X8 的引脚 5-6 和 7-8 跳接。
一、I/O信号的连接
川崎RS10L工业机器人的硬件专用信号连接
到E20控制器的1TR 板的端子块上(X7、
X8、X9连接器)。
川崎RS10L工业机器人的通用信号(包括软 件专用信号)连接到E20的由控制器中的
1TW 板处的连接器上(CN2、CN4连
接头)。
E20控制器内部结构
一、I/O信号的连接-硬件专用信号的连接
机器人现场编程-川崎机器人示教-综合命令

二 、综合命令组成要素参数的设定-夹紧
• 夹紧参数用以设定示教步骤中轴一致后夹具开合动作;
• 按示教器“A+夹紧1”键,在参数显示行夹紧参数值显示区域的显示变化 过程为:夹紧命令编号1→无显示→夹紧命令编号1。
三、 课程预告
• 工业动方式的控制指令;
• 设定插补类型的方法:A+插补
二 、综合命令组成要素参数的设定-速度
• 速度参数用以设定从前一步到当前步骤运动过程需运动速度等级;
• 按示教器“A+速度”键显示如下画面。按数字键,输入速度编号(0-9), 按 ↵ 确定输入的编号。
二 、综合命令组成要素参数的设定-精度
川崎工业机器人示教
综合命令
一 、综合命令示教
一 、综合命令示教
• 综合命令示教(又称一体化示教)编程,程序由“综合命令”来编辑。
程序行
命令要素显示行
命令要素参数 显示行
二、 综合命令的要素
• 综合命令由在机器人的各应用领域(焊接、 搬运等应用)需要的命令要素组成。
二、 综合命令组成要素参数的设定-插补
• 精度参数用以设定在当前步骤中需要的,到达示教点轴一致状态的精度值;
• 按示教器“A+精度”键显示如下的画面。用数字键,输入精度编号(04),按 ↵ 确定输入的精度编号。
二、综合命令组成要素参数的设定-计时
• 计时参数用以设定在当前步骤示教点轴一致后要等待的时间;
• 按示教器“A+计时”键显示如下的画面。按数字键,输入记时器编号(09),按 ↵ 确定输入的计时编号。
川崎机器人操作说明书

川崎机器人操作说明目录示教器主界面 (2)如何在接口面板和程序窗口之间切换 (5)接口面板有几页,如何翻页 (6)如何切换手动模式和自动模式 (6)如何手动移动机器人 (7)如何示教位置 (8)如何将机器人移动至抓取点或已示教的点 (12)如何查看机器人输入输出IO状态 (13)如何手动控制抓手打开合上 (14)示教器主界面示教器界面分两种,一种是显示接口面板如下图所示:一种是显示程序,如下图所示:按下机器人键,可以在接口面板和程序之间切换。
下面对机器人界面做个介绍显示机器人处于手动模式(示教),还是自动模式(再线)。
显示当前正在执行的前台程序。
显示当前正在执行的后台程序。
运转/暂停机器人,当机器人停止时,显示hold ,当机器人正在运行时,显示RUN打开/切断马达电源,灰色表示电源关闭。
启动循环操作,当为绿色时,正在循环执行程序。
机器人当前坐标系,点击它可以切换坐标系。
这个很重要,如果机器人不运行,检测是否设置为步骤连续,再现连续。
操作接口面板有些按钮,需要切换到许可。
这个是接口面板,上面有一些操作按钮,右右上角可以看到,这个一共有8页,当前处于第一页。
自动运行的速度,手动运行的速度,点击它,可以设定速度。
程序窗口如何在接口面板和程序窗口之间切换按下CC键,即可切换。
接口面板有几页,如何翻页1/8 表示一共有8页,当前处于第一页翻页请先按下“A”键,再按“上下”键。
如何切换手动模式和自动模式切换手动模式吧下面图中开关都拧到手状态,即为手动模式。
反之,则为自动模式。
这个开关在示教器上这个开关在控制柜上如何手动移动机器人首先,将机器人切换到手动状态下点击此按钮调整一下手动移动的速度(刚开始不熟悉的情况下,调成2或3)。
点此按钮切换坐标系,可以使用base坐标系,和joint坐标系,不要使用tool坐标系。
将RUN 和MOTOR 点亮(点亮的方法为:按住A键,再点击此图标即可)。
Cycle 不用点亮(实际上,只有自动才能点亮)按下背面的使能开关再按下轴移动键如何示教位置第一步,点击当前程序窗口按下键,点击列表。
川崎机器人程序编辑与运行

JOINT:J1,J2,J3,J4,J5,J6 BASE: X,Y,Z,O,A, TOOL: 坐标TCP是做在工具上需要用户自定义, 默认TCP为本机法兰面。
相关知识
6. 观察位置状态
显示屏幕以关节角度或直角坐标系值显示位置信息,随着机器人的运动,屏幕上的位置 信息 不断地动态更新。屏幕上的位置信息只是用来显示的,不能修改。
相关知识
4)在出现的软键盘界面输入程序代码,按回车“ENTER”确认
用软键盘在空白行中输 入程序代码
相关知识
3.插入指令代码
1)选择程序进入编辑界面 2)移动光标到所要插入指令代码的前一步代码位置
辅助键“A”与光标 键一起按下操作可在 程序代码上移动光标
相关知识
3)重复操作上一章节“输入非运动指令”中2) ~ 4)步骤,将所需要插入的程序代码填入空白行 中,点击软键盘“ENTER”。例如:插入“speed 100”
相关知识
2.移动光标选中要复制的程序名
相关知识
3.按ENTER键,出现Input copy program name画面,在屏幕出现的软键盘上输入 复制的程序名称,例如“P10.pg”,点击软键盘上的ENTER键,程序完成复制
相关知识
七.编辑指令 1.输入运动指令
1)选择程序进入编辑界面 2)将机器人控制柜及示教器打到示教状态
相关知识
3.选择程序“Program”-程序选择“PRG SEL”
相关知识
4.点击1#程序选项进入程序列表,选择需要保存的程序
第1项中自动出现刚 才选择的程序名
2~5项可以分别保存 另外需要备份的程序, 每次最多保存5个文 件
D系列川崎机器人 安装连接手册.
4.1使用吊车..................................................................14
4.2使用叉车..................................................................15
本手册只说明了控制单元的安装与连接、接线及其初级电源(主电源。机器人手臂的相关信息请参阅下列手册。
“安装和连接手册=机器人手臂=”
1.本手册并不构成对使用机器人的整个应用系统的担保。因此,川崎公司将不会对使用这样的系统而可能导致的事故、损害和(或与工业产权相关的问题承担责任。
2.川崎公司郑重建议:所有参与机器人操作、示教、维护、维修、点检的人员,预先参加川崎公司准备的培训课程。
3.无灰尘、烟雾、水、油等。(控制箱保护等级:IP53
(除主空气开关的把手、变压器和散热片部分外。见下图。
4.无易燃、腐蚀性液体和气体。
5.无有过大的振动。
6.无电气干扰。
(控制箱初级电源电气噪声:小于1KV/1μs
7.电源供电电压在规定范围内。(变化在+/-10 %以内
8.具备专用接地线。(100 Ω以下
9.安装位置位于机器人(带手爪或射枪的运动范围外(至少1 m、安全围栏的外边。
也需满足下列条件:
具备足够空间,以便在维修时进入控制箱。
安全围栏上,安装带有安全插销的进口。
关于安全围栏的技术细节,请参考对各区域的具体要求。
(例如EN953、EN294、EN811、EN1088、ISO13852、ISO13854和ISO/NP14120
川崎外部启动(15.12.2)
--------当工位 1 的预约按钮按下,
TWAIT 2
2s 后,
IF SIG(1001) THEN
检测工位 1 按钮是否仍然按下,
SWAIT -1001
等待工位 1 预约按钮弹起
IF shu[1]==1 THEN 当预约顺序为 1 的工位编号为 1 时,将其预约状态取消
shu[1] = shu[2]
SIGNAL -2
VALUE 3: SIGNAL -3
VALUE 4: SIGNAL -4
VALUE 0: ;
END
工位 2 预约状态灯灭 ... ... ... ... ...
机器人控制柜内部板及 PIN 定义
1GN
1GN
1GN
1GN
1GN
川崎机器人编程教程

川崎机器人编程教程
川崎机器人编程教程简介
川崎机器人编程是一个重要的技能,它可以帮助我们控制和操作川崎机器人。
本教程将带领大家逐步学习如何进行川崎机器人编程。
第一部分:基础知识
1. 了解川崎机器人:介绍川崎机器人的特点和应用领域。
2. 编程环境设置:如何设置川崎机器人编程环境。
3. 操作界面简介:介绍川崎机器人编程的操作界面及其功能。
第二部分:编程基础
4. 坐标系统:学习川崎机器人的坐标系统和如何进行位置指定。
5. 运动指令:学习如何使用不同的运动指令来控制川崎机器人的运动。
6. 定位工具:介绍如何使用定位工具来辅助川崎机器人的编程。
第三部分:高级编程技巧
7. 条件和循环:学习如何使用条件语句和循环语句来实现更复杂的编程逻辑。
8. 用户编程:介绍如何自定义函数和程序,以满足特定的编程需求。
9. 异常处理:学习如何捕捉和处理川崎机器人编程中可能出现的异常情况。
第四部分:实践项目
10. 案例分析:通过实际案例分析,帮助大家将所学知识应用
到实际的川崎机器人编程项目中。
本教程将采用生动易懂的方式介绍川崎机器人编程的基本概念和技巧,希望能够帮助读者快速入门并掌握川崎机器人编程的基本方法。
让我们开始学习吧!。
机器人现场编程-川崎机器人的回零
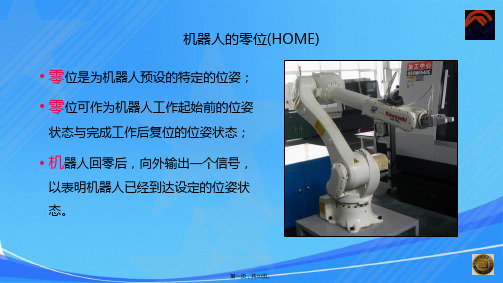
机器人的零位(HOME)
• 零位是为机器人预设的特定的位姿; • 零位可作为机器人工作起始前的位姿
状态与完成工作后复位的位姿状态;
• 机器人回零后,向外输出一个信号,
以表明机器人已经到达设定的位姿状 态。
第六页,共10页。
机器人回零的方法-方法2(续)
第七页,共10页。
机器人回零的方法-方法2(续)
第八页,共10页。
• 插入操作视频2
第九页,共10页。
第十页,共10页。
第一页,共10页。
机器人回零前的准备
第二页,共10页。
机器人回零的方法-方法1
1、打开一个有"HOME" 指令的程序。
第三页,共10页。
机器人回零的方法-方法1(续)
第四页,共10页。
• 插入操作视频1
第1、新建一个程序,输入 HOME"指令并执行。
川崎机器人ProfiNet通讯步骤说明
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
9
总线PLC端设定参考-ProfiNet从站设定(西门子PLC)
在ProfiNet模块上添加新的子网,并将川崎的机器人配置文件拖到该子网 中
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
10
总线PLC端设定参考-ProfiNet从站设定(西门子PLC)
双击川崎机器人模块并将信号数拖进设备概览一览中 图中所示为32位。
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
11
总线PLC端设定参考-ProfiNet从站设定(西门子PLC)
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
2
通用设定部分
进入辅助=>6.输入/输出信号=>11.I/O信号数设定菜单 外部输入/输出信号数根据1TW板卡的数量来决定。1块板卡自带32位输入, 32位输出(标配)。 主/从信号数则代表着主站和从站需要设定的信号的位数。(最多960个) 以主从各32位为例如下图
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
5
需要其他特殊设定的总线部分-ProfiNet从站设定
进入辅助=>6.输入/输出信号=>8.信号配置设定=>7.PROFInet Set菜单 在从口位置设定设备的名称,多台的情况下名015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
川崎机器人编程

POINT #pickb = SHIFT(pickpointb BY 0,200*(rb-1),0)
LMOVE #pickb
TWAIT 1
SIGNAL 1
SPEED 20
LAPPRO #pickb,500
LMOVE pointb3
SPEED 40
LMOVE #pickfront;抓件上方点
SPEED 10
POINT #picka = SHIFT(pickpoint BY 0,200*(ra-1),0) ;抓件点计算公式
LMOVE #picka;抓件点
TWAIT 1
SIGNAL 1
TWAIT 1
SIGNAL 1
SWAIT 1001,1002,1003
LMOVE point9
LMOVE point10
LMOVE point12
LMOVE point14
.END
.PROGRAM home()#0
HOME
.END
.PROGRAM main()#0
SPEED 20
LMOVE p1acepoint
TWAIT 1
SWAIT 1004
SIGNAL -1
LMOVE point06
LMOVE point6
SPEED 40
LMOVE point7
SPEED 80
LMOVE point8
LMOVE #pick2
SPEED 20
LAPPRO #picka,500 ;抓件后上升位
LMOVE point3
SPEED 40
LMOVE point4
电子教案-工业机器人现场编程(川崎)+沈鑫刚+PPT-C-43-O-O-川崎机器人通讯

三、课程预告
• 川崎工业机器人I/O信号的连接
使用,那些没有分配给软件专用信号的输入/输出通道,均可用作通用信号。 • 在再现模式运行程序中,通用信号被输出到端口,或从端口输入。川崎
RS10L工业机器人中通用信号连接在 1TW 的 CN2 和 CN4 连接器上。 • 从硬件配置来说,通用输入/输出信号与软件专用信号是一样的。软件专用
信号预先定义并用于条件输出、遥控操作以及专用功能。通用信号可依据 各种应用可自由使用。
三、川崎工业机器人I/O信号的类型
川崎工业机器人外部 I/O(输入/输出)信号可分为三种类型: • (1)硬件专用信号 • (2)软件专用信号 • (3)通用信号
三、川崎工业机器人I/O信号的类型-硬件专用信号
• 硬件专用信号 :信号由硬件系统提供,它的设置(使用/不使用)是可选
的。硬件专用信号被连接到 控制器内1TR板的端子块上。
• 硬件专用信号主要用于外部控制操作,它通过切换内部硬件线路来实现。
• 硬件专用信号有以下 6 个:
硬件专用输入信号
硬件专用输出信号
1. 外部控制电源 ON/OFF
1. 示教/再现开关
2. 外部马达电源 ON
2. 错误发生(故障)
3. 安全回路 OFF
4. 外部暂停
三、川崎工业机器人I/O信号的类型-软件专用信号
• 软件专用信号 :信号由软件系统提供,它的设置(使用/不使用)是可选
的。常用的软件专用信号如下:
软件专用输入信号
软件专用输出信号
1. 外部马达电源 ON(EXT. MOTOR ON) 1. 马达电源 ON(MOTOR ON)
2. 外部错误复位(EXT. ERROR RESET) 2. 错误发生(ERROR)
机器人现场编程-工业机器人IO信号应用实例

故障排除子程序
.PROGRAM emergency( ) PRINT “**error**” SWAIT retry ONI fault CALL emergency RETURN .END
主程序
SWAIT test.end JDEPART 100 SIGNAL -test.start IF SIG(a.part,-b.part) GOTO 20 IF SIG(-a.part,b.part) GOTO 30 POINT n=r GOTO 40 20 POINT n=a GOTO 40 30 POINT n=b 40 JAPPRO n,100 LMOVE n OPENI 1 TWAIT 2 LDEPART 100 GOTO 10 .END
三、机器人输入/输出信号的定义
为便于编程与程序的可读性,根据下表所列,在工业机器人示教器命令提示符“>”后定 义零件检测、分拣系统中工业机器人I/O信号命名成专用变量。 >set.end=1001 / 将放置完成信号(IN1)命名为set.end (由PLC输出信号给机器人) (由PLC输出信号给机器人)
/ 将启动测试信号(OUT1)命名为test.start (由机器人输出给PLC)
ቤተ መጻሕፍቲ ባይዱ 四、机器人控制程序
.PROGRAM main( ) SPEED 100 ALWAYS ACCURACY 100 ALWAYS HOME OPENI 1 10 JAPPRO part,100 ONI fault CALL emergency SWAIT set.end LMOVE part CLOSEI 1 TWAIT 2 LDEPART 100 JAPPRO test,100 LMOVE test BREAK ; IGNORE fault SIGNAL test.start TWAIT 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2. 外部马达电源ON 1)使用“外部马达电源 ON”时的连接 短接 1TR 板端子块连接器 X9 的引脚 5-6,开启马达电源至 ON。在连
接器 X9 上的引脚 5和 6 之间连接一个开关或继电器触点。须使用脉冲信号, 不允许一直闭合。
(2)安全围栏输入(仅在再现模式下有效) 1) 使用“安全围栏输入”(使用2 个安全回路时) 将 1TR 板的端子块连接器 X8 的引脚 1-2 和 3-4 上的跳线去除,按下
图所示连接安全围栏的开关触点。
2)不使用“安全围栏输入”时的连接 将1TR 板的端子块连接器 X8 的引脚 1-2,3-4跳线。
电路数量 输入类型 输入电压 输入电流 连接器类型
32
晶体管输出
Hale Waihona Puke DC24 V±10 %
0.1A或以下
37 针 D 型连接器
二、软件专用信号的编号
信号编 号 软件专用外部输出信号 软件专用外部输入信号
标准范围 1-32
1001-1032
最大范围 1-960
1001-1960
物料搬运软件专用信号(标准设置)
川崎工业机器人I/O信号的连接
一、I/O信号的连接
川崎RS10L工业机器人的硬件专用信号连接
到E20控制器的1TR 板的端子块上(X7、
X8、X9连接器)。
川崎RS10L工业机器人的通用信号(包括软 件专用信号)连接到E20的由控制器中的
1TW 板处的连接器上(CN2、CN4连
接头)。
E20控制器内部结构
外部暂停触点。此触点开路时,机器人将暂停。
2)不使用“外部暂停” 在 1TR 板的端子块连接器 X9 连接器上,将引脚 7-8 跳接。
5. 示教/再现(硬件输出信号) 此信号从 1TR 板端子块连接器 X8 的引脚 9-10 上输出。
6. 错误发生(硬件输出信号) 此信号由 1TR 板端子块连接器 X8 的引脚 11 与 12 向外部输出错误出现,
一、I/O信号的连接-硬件专用信号的连接
1. 外部控制电源 ON/OFF 1)使用“外部控制器电源 ON/OFF” 时的连接 将 1TR 板 X9 连接器端子块的引脚 3-4 开路,给引脚 1 供上+24 V,
给引脚 2 供上 0 V,接线方法如所示。
2)不使用“外部控制器电源 ON/OFF” 时的连接
(3)外部触发开关输入(仅在示教模式下有效) 1)使用“外部触发开关输入”(使用2 个安全回路)
2)不使用“外部触发开关输入” 将 1TR 板端子块连接器 X8 的引脚 5-6 和 7-8 跳接。
4. 外部暂停 1)使用“外部保持” 将 1TR 板端子块连接器 X9 的引脚 7-8 上的跳接线去除,按下图连接
(1)外部紧急停止(在示教和再现模式下有效) 1)使用“外部紧急停止”时的连接(使用 2 个安全回路,直接连接外部
开关触点) 将 1TR 板的端子块连接器 X7 的引脚 3-4 和 5-6 跳线去除,并按下
图来连接紧急停止开关触点,跳接引脚 1-2 与 7-8。
2)不使用“外部紧急停止”时的连接 将1TR 板的端子块连接器 X7 的引脚 1-2,3-4,5-6,和 7-8 跳线。
电路数量 输入类型 输入电压 输入电流 连接器类型
32
光电耦合器输入
DC24 V
±10 %
10 mA
37 针 D 型连接器
2)外部输出信号(机器人→外部)
1TW板 CN2连接器提供32 个输出信号。外部+24V 电源通过 CN2 的引 脚 18 和 19,提供给输出电路。两个公共引脚(CN2 中的 36和 37 引脚) 分别提供 0 V 给 OUT1-16 和 OUT17-32 输出电路。
2)不使用“外部马达电源 ON”时的连接 断开 1TR 板端子块连接器 X9 的引脚 5-6,在这两个引脚之间不连任
何电线。
3. 安全回路OFF “安全回路OFF”信号能从外部切断马达电源。当此信号断开时,马达
电源 OFF。可使用以下三类安全回路输入信号。 (1)外部紧急停止(在示教和再现模式下有效) (2)安全围栏输入(仅在再现模式下有效) (3)外部触发开关输入(仅在示教模式下有效)
是个触点信号。
一、I/O信号的连接-通用信号的连接
通用输入/输出信号(包括软件专用信号),由控制器中的 1TW 板处理。
1)外部输入信号(外部→机器人)
1TW板 CN4连接器提供32 个输入信号,有两个由外部提供的 24V 的公 共连接:CN4 的引脚 18 和引脚 19。地线与外部电源相连,输入 24V (1GW)或 0V(1HW)。每个公共分别给 CN4 中的引脚 1-16 以及引脚 20-35 连接的 16 个通道提供电源。外部输入信号与这些引脚相连。
三、课程预告
川崎工业机器人I/O信号的应用实例
The End!