字符驱动框架
C语言编译器前端的设计与实现 实训报告
第 1 章 绪论
1.1 C 语言及编译器概述
C 语言是在 70 年代初问世的。一九七八年由美国电话电报公司(AT&T)贝尔实验室正式 发表了 C 语言。同时由 B.W.Kernighan 和 D.M.Ritchit 合著了著名的“THE C PROGRAMMING LANGUAGE”一书。通常简称为《K&R》,也有人称之为《K&R》标准。但是,在《K&R》中并 没有定义一个完整的标准 C 语言,后来由美国国家标准学会在此基础上制定了一个 C 语言 标准,于一九八三年发表。通常称之为 ANSI C。C 语言是一种结构化语言。它层次清晰, 便于按模块化方式组织程序,易于调试和维护。C 语言的表现能力和处理能力极强。它不仅 具有丰富的运算符和数据类型,便于实现各类复杂的数据结构。它还可以直接访问内存的 物理地址,进行位(bit)一级的操作。由于 C 语言实现了对硬件的编程操作,因此 C 语言集 高级语言和低级语言的功能于一体。既可用于系统软件的开发,也适合于应用软件的开发。 此外,C 语言还具有效率高,可移植性强等特点。因此广泛地移植到了各类各型计算机上, 从而形成了多种版本的 C 语言。
2.3.1 自顶向下的语法分析...........................................................................................5 2.3.2 自底向上的语法分析...........................................................................................5 2.4 语义分析.........................................................................................................................6 2.5 符号表.............................................................................................................................6 2.6 类型检查.........................................................................................................................7 第 3 章 系统详细设计..................................................................................................................8 3.1 系统设计基本思路.........................................................................................................8 3.2 词法分析模块设计.........................................................................................................8 3.3 语法分析模块设计.......................................................................................................11 3.4 语义分析模块设计.......................................................................................................14 第 4 章 结束语............................................................................................................................16 参考文献...................................................................................................................................... 16 附录: 附录 1:词法分析核心代码............................................................................................17 附录 2:语法分析核心代码............................................................................................18
vue字符串小数相加
vue字符串小数相加1.引言1.1 概述概述部分的内容如下:随着互联网的发展,前端开发变得日益重要。
Vue.js作为一种流行的JavaScript框架,为前端开发人员提供了一个灵活且高效的工具。
在Vue.js 中,我们经常需要处理字符串和数字之间的转换,特别是当我们需要对字符串中的小数进行相加运算时。
本文将介绍如何在Vue.js中将字符串转换为小数,并且展示了一种方法来实现字符串小数的相加。
本文将按照以下结构进行介绍。
首先,我们会对Vue框架进行简要的介绍,包括它的特点和优势。
然后,我们会详细讲解如何将字符串转换为小数,包括使用parseFloat函数和乘法运算来实现。
最后,我们会展示一个实例,演示如何使用Vue.js实现字符串小数的相加。
通过阅读本文,读者将能够理解Vue.js框架的基本特性,掌握字符串转换为小数的方法,并且学会如何在Vue.js中实现字符串小数的相加。
这将有助于提升前端开发人员在处理数字和字符串相关问题时的能力和效率。
我们期望通过本文的介绍,读者能够深入了解Vue.js框架的优势,并且能够灵活运用其中的方法和技巧。
同时,我们也希望本文能够为读者提供解决字符串小数相加问题的思路和实践经验,帮助他们在实际的项目中取得更好的效果。
接下来,我们将在下一部分中详细介绍Vue框架的相关知识。
1.2 文章结构文章结构部分的内容可以包括以下内容:文章结构是指文档的整体布局和组织方式,它决定了文章内容的展示顺序和层次结构。
一个良好的文章结构能够使读者更好地理解文章的内容和逻辑关系,提高文章的可读性和可理解性。
在本篇文章中,我们将采用以下的文章结构:1. 引言:介绍整篇文章的背景和目的。
2. 正文:主要内容的阐述和论证。
2.1 Vue框架简介:对Vue框架的基本概念和特点进行介绍,包括Vue的核心思想、双向数据绑定、组件化开发等。
这一部分的目的是为读者提供对Vue框架的基本了解,为后续的内容打下基础。
字符串 转换 vue 例子-概述说明以及解释

字符串转换vue 例子-概述说明以及解释1.引言1.1 概述字符串转换是指将一个数据类型或格式的字符串转换为另一个数据类型或格式的过程。
在编程中,字符串是一种常见的数据类型,用于存储和操作文本信息。
而Vue框架是一种流行的JavaScript框架,用于构建用户界面。
在现代的Web应用程序开发中,字符串转换经常被使用,因为不同的数据源和API接口常常返回字符串格式的数据。
为了能够更好地处理和展示这些数据,我们需要将其转换为我们需要的格式,比如将字符串转换为整数、布尔值或特定的日期格式。
在本文中,我们将探讨字符串转换的重要性以及Vue框架在字符串转换中的应用示例。
通过学习这些内容,我们将能够更好地理解字符串转换的概念、原理和实际应用,从而能够在Vue项目中更加灵活和高效地处理字符串数据。
接下来的章节将依次介绍字符串的基本概念和用途,以及Vue框架的介绍和特点。
通过这些内容的学习,我们将为进一步探索字符串转换提供坚实的基础,并能够更好地理解Vue框架在字符串转换中的作用和优势。
最后,我们将总结本文的结论,概括字符串转换的重要性,并展示Vue框架在字符串转换中的应用示例。
通过本文的阅读,读者将能够更好地理解字符串转换的概念和原理,并掌握Vue框架在字符串转换中的应用方法。
无论是在前端开发中还是在做数据处理和展示时,读者都将能够更加自信和高效地处理字符串转换的需求。
在实际应用中,读者将能够更好地利用Vue框架的特点和功能,优化代码结构并提升用户体验。
希望本文能够为读者在字符串转换和Vue框架应用方面带来一定的帮助和指导。
1.2文章结构1.2 文章结构本文将按照以下结构进行叙述字符串转换与Vue框架的应用示例。
首先,我们将对字符串的基本概念和用途进行阐述。
在这一部分,我们将介绍什么是字符串以及字符串在程序中的广泛应用。
我们将探讨字符串的基本特性,比如长度、索引和字符处理等内容,以帮助读者对字符串有更全面的了解。
打印机调试记录(最终整理版)

目录一.码盘接线电缆型号 (3)1.电缆型号: (3)二.五个码盘的接线图示 (4)1.:测速辊码盘接线: (4)2 :旋转驱动码盘接线: (5)3 :水平框架驱动码盘接线: (6)4 字符库驱动码盘接线 (7)5 打印头驱动码盘接线: (8)6 快速换号码盘接线: (9)三.焊接码盘接线头. (10)1 旋转驱动接法 (10)2 快速换号驱动接法 (10)3 字符库驱动接法 (10)4 打印头驱动接法 (11)5 激光测距的接线 (11)6 水平框架的接线 (11)7 测速辊小车的接线 (12)四.送电过程: (13)1. 开关柜照明及风机送电 (13)2. 操作电源24V送电 (13)3. 动力电源380V送电: (13)4 PLC输出24V送电 (13)五测速辊小车 (14)1 工艺描述: (14)2 工作原理: (14)六模拟打印 (15)1 电压送电: (15)2 液压送电: (15)3 模式选择: (15)4. ECP机旁操作箱简易操作: (15)七码盘接线方式表览: (16)八寻找参考点 (22)1. 工作说明: (22)2. 位置说明: (22)九0.20参数的整定 (23)1 工作说明: (23)3 校准的动作 (23)4 调试过程及经验总结 (23)九UD73程序的下载 (26)1 目的: (26)2.下载方式: (26)3.电缆接线图 (26)十伺服阀的程序下载 (29)1.目的: (29)2.下载步骤: (29)2. 硬件接线: (30)3. 硬件接线表: (30)一.码盘接线电缆型号1.电缆型号:旋转驱动码盘:A30.1,A30.2: 4*2*0.25mm²(单屏蔽层)水平框架码盘:A31.1,A31.2: 4*2*0.25mm²(单屏蔽层)字符库码盘:A32.1,A32.2: 8*2*0.25mm²(单屏蔽层)快速换号码盘:A33.1,A33.2: 4*2*0.25mm²(双屏蔽层)打印头码盘:A34.1,A34.2: 8*2*0.25mm²(单屏蔽层)2.分析:为何电缆型号不同?原因:a)由于我们使用的是英国统一公司生产的CT变频器,针对其特性,再结合打印机的各个动作机械部分需求高精度的控制效果,即采用闭环矢量控制和闭环伺服电机随动控制,这就要求电机码盘的实际返回值的精度要高,另外,基于变频器的自诊断能力,给整个控制系统的运行和执行机构提出了非常高的要求,因此,我们对于整个控制系统的硬件部分要求也是相当苛刻。
什么是关键字驱动框架(自动化测试)
什么是关键字驱动框架(⾃动化测试)什么是关键字驱动框架?关键字驱动框架是⼀种功能⾃动化测试框架,它也被称为表格驱动测试或者基于动作字的测试。
关键字驱动的框架的基本⼯作是将测试⽤例分成四个不同的部分。
⾸先是测试步骤(Test Step),⼆是测试步骤中的对象(Test Object),三是测试对象执⾏的动作(Action),四是测试对象需要的数据(Test Data)。
以上四个部分,都可以使⽤Excel表格进⾏维护:Test Step:是⼀个⼩的测试步骤的描述或者测试对象的⼀个操作说明。
Test Object:是指页⾯对象或元素,就像⽤户名、密码,Action:指页⾯操作的动作,打开浏览器,点击⼀个按钮,⽂本框输⼊⼀串⽂本等。
Test Data:是任何对象操作时所需要的值,就像⽤户名、密码进⾏输⼊时的输⼊内容。
其实我们做关键字的驱动的思想,就是把编码从测试⽤例和测试步骤中分离出来,这样对于不会编码的⼈员更容易理解⾃动化,从⽽让⼿⼯测试⼈员也可以编写⾃动脚本。
(这并不意味这不需要⾃动化测试⼈员,对于⾃动化框架的构建,⾃动化代码的更新,结构调整等都需要⼀个技术性的⼈员)对于测试⼩的项⽬的团队,可以有两个⼿⼯测试⼈员和⼀个⾃动化测试⼈员。
通过⼀个简单的登录功能例⼦来理解这个概念,想想看你的⾃动化流程需要做哪些事情:1. 打开⼀个浏览器2. 输⼊url跳转到⽹站⾸页3. 点击“登录”链接,进⼊登录页⾯4. 输⼊“⽤户名”5. 输⼊“密码”6. 点击“登录”按钮,进⾏登录7. 点击“注销”按钮,退出登录8. 关闭浏览器下⾯是我们将要去实现的⼀些通⽤组件:1. Excel Sheet: 是我们存放测试⽤例(Test Case)、测试步骤(Test Step)、测试对象(Test Object)和操作动作(Action)的关键字驱动数据表。
2. Object Repository: 是个属性⽂件,⽤来存放HTML应⽤中的⼀些元素属性(可看做元素的对象仓库),该⽂件与测试对象进⾏链接。
普及型PLC自由协议通讯框架设计

普及型PLC自由协议通讯框架设计作者:徐文来源:《科技视界》 2012年第30期徐文(浙江经济职业技术学院数字信息技术分院浙江杭州310018)【摘要】针对目前基于不同协议的PLC工业通讯程序在设计成本和灵活性方面存在的问题,本文深入分析了S7-200系列PLC的通讯机理,并在此基础上通过接口抽象、中断驱动通讯流程定义的方法设计了基于自由协议的S7-200小型PLC通讯框架。
在该框架下的通讯程序开发方式具有标准一致、效率高、易于复用性的特点,并通过实验验证了功能的有效性。
【关键词】自由协议;通讯框架;PLC0 引言PLC(Programmable Logic Controller,可编程控制器)主导的工业通讯主要分为管理级、过程控制级和现场总线级等级别。
由于接口、链路、协议和应用的多样性,不同级别的PLC通讯在通常情况下需要采用不同的方法和标准进行编程,且不同品牌PLC之间的通讯标准、协议不具备通用性,由PLC设备组建通讯网络就呈现出复杂的特性。
文献1介绍了基于组态软件的Profibus通讯设计方法,文献2、3介绍了PLC与计算机和变频器之间基于MODIBUS、USS协议的通讯设计方法,文献4介绍了PPI协议的OPC通讯设计方法,这些设计大多借助高成本的组态软件等第三方工具实现,缺乏应用的灵活性。
文献5、6、7虽然自定义协议实现了最大程度通讯应用的灵活性,但可复用率低。
尤其当PLC设备承担工业网络中不同通讯层级的中转节点时,就需要编制基于不同协议、面向不同应用的PLC端通讯软件。
这样将提高开发和维护的成本,且成果较难复用。
本文通过对西门子S7-200小型机RS485口的自由协议通讯机制的分析,设计了基于自由协议的通讯框架。
1 S7-200PLC自由协议通讯机理目前不少PLC制造商都开发出自由协议通讯模式,即PLC提供串行通讯硬件和用于定制通讯协议的相关指令,由用户控制串行通讯接口,采用自定义通讯协议来编制PLC通讯程序,实现与其它控制设备的数据通讯。
PCI驱动编程
目录一、字符设备和块设备 (2)二、设备驱动程序接口 (2)三、设备驱动程序模块 (3)四、设备驱动程序结构 (4)1.驱动程序的注册与注销 (4)2.设备的打开与释放 (4)3.设备的读写操作 (4)4.设备的控制操作 (5)5.设备的中断和轮询处理 (5)五、PCI驱动程序框架 (5)1.关键数据结构 (5)a. pci_driver (5)b. pci_dev (6)2.基本框架 (9)六、框架的具体实现之模块操作 (12)1.struct pci_device_id (12)2.初始化设备模块 (12)3.卸载设备模块: (15)4.中断处理: (16)七、框架的具体实现之设备文件操作 (16)1.设备文件操作接口 (16)2.打开设备模块 (17)3.释放设备模块 (17)4.设备数据读写和控制信息模块 (18)5.内存映射模块 (19)八、附录 (19)1.PCI设备私有数据结构 (19)2.PCI配置寄存器 (20)参考资料: (21)一、字符设备和块设备Linux抽象了对硬件的处理,所有的硬件设备都可以像普通文件一样来看待:它们可以使用和操作文件相同的、标准的系统调用接口来完成打开、关闭、读写和I/O控制操作,而驱动程序的主要任务也就是要实现这些系统调用函数。
Linux系统中的所有硬件设备都使用一个特殊的设备文件来表示,例如,系统中的第一个IDE硬盘使用/dev/hda表示。
每个设备文件对应有两个设备号:一个是主设备号,标识该设备的种类,也标识了该设备所使用的驱动程序;另一个是次设备号,标识使用同一设备驱动程序的不同硬件设备。
设备文件的主设备号必须与设备驱动程序在登录该设备时申请的主设备号一致,否则用户进程将无法访问到设备驱动程序。
在Linux操作系统下有两类主要的设备文件:一类是字符设备,另一类则是块设备。
字符设备是以字节为单位逐个进行I/O操作的设备,在对字符设备发出读写请求时,实际的硬件I/O紧接着就发生了,一般来说字符设备中的缓存是可有可无的,而且也不支持随机访问。
linux字符驱动框架(用户态的read,write,poll是怎么操作驱动的)
linux字符驱动框架(⽤户态的read,write,poll是怎么操作驱动的)前⾔这篇⽂章是通过对⼀个简单字符设备驱动的操作来解释,⽤户态的读写操作是怎么映射到具体设备的。
因为针对不同版本的linux内核,驱动的接⼝函数⼀直有变化,这贴出我测试的系统信息:root@ubuntu:~/share/dev/cdev-2# cat /etc/os-release |grep -i verVERSION="16.04.5 LTS (Xenial Xerus)"VERSION_ID="16.04"VERSION_CODENAME=xenialroot@ubuntu:~/share/dev/cdev-2#root@ubuntu:~/share/dev/cdev-2# uname -r4.15.0-33-generic字符驱动这⾥给出了⼀个不怎么标准的驱动,定义了⼀个结构体 struct dev,其中buffer成员模拟驱动的寄存器。
由wr,rd作为读写指针,len作为缓存buffer的长度。
具体步骤如下:1. 定义 init 函数,exit函数,这是在 insmod,rmmod时候调⽤的。
2. 定义驱动打开函数open,这是在⽤户态打开设备时候调⽤的。
3. 定义release函数,这是在⽤户态关闭设备时候⽤到的。
4. 定义read,write,poll函数,并挂接到 file_operations结构体中,所有⽤户态的read,write,poll都会最终调到这些函数。
chardev.c/*参考:深⼊浅出linux设备驱动开发*/#include <linux/module.h>#include <linux/init.h>#include <linux/fs.h>#include <linux/uaccess.h>#include <linux/wait.h>#include <linux/semaphore.h>#include <linux/sched.h>#include <linux/cdev.h>#include <linux/types.h>#include <linux/kdev_t.h>#include <linux/device.h>#include <linux/poll.h>#define MAXNUM 100#define MAJOR_NUM 400 //主设备号 ,没有被使⽤struct dev{struct cdev devm; //字符设备struct semaphore sem;int flag;poll_table* table;wait_queue_head_t outq;//等待队列,实现阻塞操作char buffer[MAXNUM+1]; //字符缓冲区char *rd,*wr,*end; //读,写,尾指针}globalvar;static struct class *my_class;int major=MAJOR_NUM;static ssize_t globalvar_read(struct file *,char *,size_t ,loff_t *);static ssize_t globalvar_write(struct file *,const char *,size_t ,loff_t *);static int globalvar_open(struct inode *inode,struct file *filp);static int globalvar_release(struct inode *inode,struct file *filp);static unsigned int globalvar_poll(struct file* filp, poll_table* wait);/*结构体file_operations在头⽂件 linux/fs.h中定义,⽤来存储驱动内核模块提供的对设备进⾏各种操作的函数的指针。
linux-GPIO驱动实验

GPIO驱动实验一、实验目的1.理解Linux GPIO驱动程序的结构、原理。
2.掌握Linux GPIO驱动程序的编程。
3.掌握Linux GPIO动态加载驱动程序模块的方法。
二、实验内容1. 编写GPIO字符设备驱动程序。
2. 编写Makefile文件。
3. 编写测试程序。
4. 调试GPIO驱动程序和测试程序。
三、实验设备1.硬件:PC机,基于ARM9系统教学实验系统实验箱1台;网线;串口线,电压表。
2.软件:PC机操作系统;Putty;服务器Linux操作系统;arm-v5t_le-gcc交叉编译环境。
3.环境:ubuntu12.04.4;文件系统版本为filesys_clwxl;烧写的内核版本为uImage_slh_gpio,编译成的驱动模块为davinci_dm365_gpios.ko,驱动源码见GPIO文件夹。
四.预备知识4.1 概述在嵌入式系统中,常常有数量众多,但是结构却比较简单的外部设备/电路,对这些设备/电路有的需要CPU为之提供控制手段,有的则需要被CPU用作输入信号。
而且,许多这样的设备/电路只要求一位,即只要有开/关两种状态就够了,例如灯的亮与灭。
对这些设备/电路的控制,使用传统的串行口或并行口都不合适。
所以在微控制器芯片上一般都会提供一个通用可编程I/O接口,即GPIO (General Purpose Input Output)。
GPIO的驱动主要就是读取GPIO口的状态,或者设置GPIO口的状态。
就是这么简单,但是为了能够写好的这个驱动,在LINUX上作了一些软件上的分层。
为了让其它驱动可以方便的操作到GPIO,在LINUX里实现了对GPIO操作的统一接口,这个接口实则上就是GPIO驱动的框架。
在本实验中,将编写简单的GPIO驱动程序来控制LCD液晶屏屏幕的亮灭,然后动态加载模块,并编写测试程序,以验证驱动程序。
4.2 实现的功能1> 设置对应的GPIO口为输出。
基于EZ-USB FX3的驱动程序设计

基于EZ-USB FX3的驱动程序设计刘杰;刁节涛;李楠;孙兆林【摘要】USB3.0数据传输接口以其在传输速度方面具有的优势正逐渐取代USB2.0接口成为电子设备接口的主流,驱动开发需求也与日俱增.传统的Driver Studio+ WDM驱动设计方法难度大、耗时长,已无法满足现实应用需求.文中采用全新的WDF驱动架构,通过通用驱动程序改进的方法,在Visual Studio2013+ WDK8.1的开发、编译环境下进行了USB3.0驱动程序设计.实验结果表明,该方法设计的驱动可稳定运行,有效地降低了驱动开发难度,并且缩短了开发周期.【期刊名称】《电子科技》【年(卷),期】2016(029)007【总页数】4页(P68-71)【关键词】USB3.0驱动;WDF;EZ-USB FX3【作者】刘杰;刁节涛;李楠;孙兆林【作者单位】国防科学技术大学电子科学与工程学院,湖南长沙410073;国防科学技术大学电子科学与工程学院,湖南长沙410073;国防科学技术大学电子科学与工程学院,湖南长沙410073;国防科学技术大学电子科学与工程学院,湖南长沙410073【正文语种】中文【中图分类】TP334.7USB(Universal Serial Bus)接口自诞生以来已经走过了10多年的历史,其具有廉价、易用、传输速度快、兼容性好等一系列优点,被广泛用于电子设备的数据传输接口。
以前,USB开发者采用WDM的驱动模式进行Windows操作系统下的USB驱动开发,但在Windows操作系统经历了Win7、Win8和最新的Win10革新之后,原始的WDM模式已经无法满足现实的驱动开发需求。
因此,WDF这种新的驱动开发模式应运而生。
赛普拉斯的EZ-USB FX3是新一代USB 3.0外设控制器,其集成了USB 3.0和USB 2.0 传输接口和32位ARM926EJ-S 微处理器[1],具有强大的数据处理能力,在数据传输领域充当着重要角色。
编程 框架 介绍
编程框架介绍编程框架是指在软件开发过程中,为了提高开发效率和降低复杂度而提供的一种工具或者一组工具的集合。
它们提供了一种结构化的方式来组织和管理代码,同时还提供了一系列的函数、类和接口等,以便开发人员能够更加方便地进行开发工作。
本文将介绍几种常见的编程框架,并对它们的特点和应用进行简要描述。
1. Spring框架Spring框架是一个开源的Java应用程序框架,它主要用于构建企业级应用程序。
Spring框架提供了一系列的模块,包括依赖注入、面向切面编程、事务管理、MVC框架等。
它的核心原则是松耦合、面向接口编程和依赖注入。
Spring框架的主要优点是提供了很好的解耦能力,使得开发人员可以更加专注于业务逻辑的实现。
2. Django框架Django框架是一个基于Python的Web应用程序框架,它以快速开发和高效设计为目标。
Django框架提供了一系列的工具和库,用于处理URL路由、表单验证、数据库操作等常见的Web开发任务。
它的主要特点是简单易用、功能丰富和高效稳定。
Django框架的设计理念是DRY(Don't Repeat Yourself),即避免重复代码,提高开发效率。
3. React框架React框架是一个用于构建用户界面的JavaScript库。
它由Facebook开发并开源,目的是为了解决构建大规模应用程序的性能问题。
React框架采用了虚拟DOM(Virtual DOM)的概念,通过比较虚拟DOM和真实DOM的差异来减少DOM操作次数,从而提高性能。
React框架还提供了一套组件化的开发模式,使得开发人员可以将界面拆分成独立的组件,提高代码的可维护性和复用性。
4. TensorFlow框架TensorFlow框架是一个用于机器学习和深度学习的开源软件库。
它由Google开发并开源,支持多种编程语言,如Python、C++等。
TensorFlow框架提供了一系列的API和工具,用于构建和训练神经网络模型。
platfrom设备驱动框架
platfrom设备驱动框架前⾯编写的设备驱动都⾮常的简单,都是对IO进⾏最简单的读写操作。
像I2C、SPI、LCD 等这些复杂外设的驱动就不能这么去写了,Linux 系统要考虑到驱动的可重⽤性,因此提出了驱动的分离与分层这样的软件思路,在这个思路下诞⽣了我们将来最常打交道的platform 设备驱动,也叫做平台设备驱动。
1、Linux驱动的分离与分层1.1 驱动的分隔与分离对于 Linux 这样⼀个成熟、庞⼤、复杂的操作系统,代码的重⽤性⾮常重要,否则的话就会在 Linux 内核中存在⼤量⽆意义的重复代码。
尤其是驱动程序,因为驱动程序占⽤了 Linux内核代码量的⼤头,如果不对驱动程序加以管理,任由重复的代码肆意增加,那么⽤不了多久Linux 内核的⽂件数量就庞⼤到⽆法接受的地步。
假如现在有三个平台 A、B 和 C,这三个平台(这⾥的平台说的是 SOC)上都有 MPU6050 这个 I2C 接⼝的六轴传感器,按照我们写裸机 I2C 驱动的时候的思路,每个平台都有⼀个MPU6050的驱动,因此编写出来的最简单的驱动框架如图所⽰:每种平台下都有⼀个主机驱动和设备驱动,主机驱动肯定是必须要的,毕竟不同的平台其 I2C 控制器不同。
但是右侧的设备驱动就没必要每个平台都写⼀个,因为不管对于那个 SOC 来说,MPU6050 都是⼀样,通过 I2C 接⼝读写数据就⾏了,只需要⼀个 MPU6050 的驱动程序即可。
如果再来⼏个 I2C 设备,⽐如 AT24C02、FT5206(电容触摸屏)等,如果按照图中的写法,那么设备端的驱动将会重复的编写好⼏次。
显然在 Linux 驱动程序中这种写法是不推荐的,最好的做法就是每个平台的 I2C 控制器都提供⼀个统⼀的接⼝(也叫做主机驱动),每个设备的话也只提供⼀个驱动程序(设备驱动),每个设备通过统⼀的 I2C接⼝驱动来访问,这样就可以⼤⼤简化驱动⽂件,⽐如 54.1.1 中三种平台下的 MPU6050 驱动框架就可以简化为图所⽰:这个就是驱动的分隔,也就是将主机驱动和设备驱动分隔开来,⽐如 I2C、SPI 等等都会采⽤驱动分隔的⽅式来简化驱动的开发。
TSF输入法框架的工作原理
TSF输入法框架的工作原理展开全文PS:本篇文章是基于网络上的一些文章、微软官方文档以及自己的理解整理而成,若理解有误,还请大家及时提出。
在了解了TSF的强大之后,很容易产生一个疑问,TSF是如何将应用程序和 T ext Service 隔离开的呢?这里简单介绍下TSF 的工作原理。
首先需要知道,基于TSF 框架的输入法实际上是一个COM程序。
也就是说,微软为我们提供了很多的虚基类,然后我们需要实现一个COM 程序。
(1)首先要确认,在应用程序和 Text Service 之间进行传递的是一个 text stream(文本流),既然是 text stream, 肯定要有text(可以理解成 text stream 的载体),比如说notepad,word,各种输入框,都可以理解成是一个text。
TSF 的处理是首先由应用程序创建一个Thread Manager,创建方法是通过 CoCreateInstance 创建一个组件对象,对应的,微软提供的接口是 ITfThreadMgr。
(2)创建好Thread Manager 之后,用 Thread Manager 来创建一个Document Manager(文档管理器),方法是ITfThreadMgr::CreateDocumentMgr。
应用程序会为每一个不同的Document 创建一个 Document Manager(3)创建 Document Manager 后,用 ITfDocumentMgr 来创建一个 edit context,方法是 ITfDocumentMgr::CreateContext。
实际上,Thread Manager 为每个 Document Manager 都维护了一个 context stack,新创建的context 被压入到了栈中。
那么,Text Service 是如何往context 中写入text stream 的呢?对于这个问题,首先Text Service 要获得一个context。
ADC
嵌入式实验室
Makefile
编译驱动程序,并加载进内核里,首先编写Makefile。
KERN_DIR = /work/system/linux-2.6.28.6 all: make -C $(KERN_DIR) M=`pwd` modules clean: make -C $(KERN_DIR) M=`pwd` modules clean rm -rf modules.order obj-m += adc.o
嵌入式实验室
设置入口
设置驱动的入口函数static int __init adc_init(void) ,来调用 register_chrdev,实现模块的初始化工作。 修饰入口函数:module_init(adc_init); 对应的有出口函数用于卸载驱动函数,并且修饰出口函数 static int __exit adc_exit(void) module_exit (adc_exit); 至此,基本的驱动框架也就完成了,对于ADC驱动,需进行相应的硬件操作。
怎样告诉内核file_operation这个结构体?
嵌入式实验室
注册
把file_operation结构体告诉内核,是通过register_chrdev函数向内核注 册字符型设备驱动程序来完成。 ret = register_chrdev(220, DEVICE_NAME, &s3c2410_adc_fops); 其中,220是为设备驱动程序向系统申请的主设备号, DEVICE_NAME为设 备名,这里在程序一开始对其进行了定义 #define DEVICE_NAME “s3c2410-adc”//设备名 static int adcMajor = 220; //主设备号 如果register_chrdev操作成功,当驱动加载进内核后,主设备号,设备名 就会出现在/proc/devices文件里,说明注册成功。 主设备号可以手工指定(mknod),也可动态分配。 动态分配时,需给sysfs提供更多的信息,由udev(mdev)机制可自动创建 设备节点。 major = register_chrdev(0, DEVICE_NAME, &s3c2410_adc_fops);
前端开发中常用的编程语言与框架介绍

前端开发中常用的编程语言与框架介绍在当今数字化时代,互联网的发展势不可挡,而前端开发作为构建网页和应用程序用户界面的关键领域,也日益受到重视。
前端开发需要掌握多种编程语言和框架,以实现网页和应用程序的优化和交互性。
本文将介绍前端开发中常用的编程语言与框架,帮助读者了解并选择适合自己的技术栈。
一、HTML/CSSHTML(超文本标记语言)和CSS(层叠样式表)是前端开发的基础,几乎所有网页都是由HTML和CSS构建而成。
HTML用于定义网页的结构和内容,而CSS则用于控制网页的样式和布局。
HTML和CSS的学习门槛较低,是初学者入门前端开发的首选语言。
二、JavaScriptJavaScript是一种高级的、解释型的编程语言,被广泛应用于前端开发中。
它可以为网页添加动态效果、实现用户交互和处理数据等功能。
JavaScript可以直接嵌入到HTML中,也可以作为外部脚本文件引入。
由于JavaScript的灵活性和强大的功能,它成为了前端开发的核心语言。
三、ReactReact是由Facebook开发的一种JavaScript库,用于构建用户界面。
它采用组件化的开发方式,将界面拆分成多个独立的组件,使得代码更加可复用和易于维护。
React的虚拟DOM技术可以提高页面的渲染性能,使得用户在使用过程中感受到更流畅的交互。
React已经成为目前最流行的前端框架之一。
四、VueVue是一种轻量级的JavaScript框架,用于构建用户界面。
它的设计理念是渐进式的,可以根据项目需求选择性地引入不同的功能模块。
Vue具有简单易学、灵活高效的特点,适用于各种规模的项目开发。
Vue的生态系统也非常丰富,有大量的插件和工具可供选择。
五、AngularAngular是由Google开发的一种JavaScript框架,用于构建大型、复杂的Web 应用程序。
它采用了MVC(模型-视图-控制器)的架构模式,提供了丰富的功能和组件,可以帮助开发者更好地管理和组织代码。
Android 的照相机系统

硬件 操作
字符设备驱动程序核心
硬件层 摄像头 视频输出设备
2.2 硬件抽象层的内容
Camera 的硬件抽象层的在 UI 库的头文件 CameraHardwareInterface.h 文件定义。 在这个接口中,包含了控制通道和数据通道 ,控制通道用于处理预览和视频获取的开始 / 停 止、拍摄照片、自动对焦等功能,数据通道通过 回调函数来获得预览、视频录制、自动对焦等数 据。 Camera 的硬件抽象层中还可以使用 Overlay 来实现预览功能。
Android 的照相机系统
韩 超 @ Android 技术
Android 的 Camera 系统
第一部分 Camera 系统的结构 第二部分 移植和调试的要点 第三部分 Camera 实现方式
第一部分 Camera 系统的结构
照相机系统下层的硬件通常是摄像头 设备,主要用于向系统输入视频数据。摄像 头设备通常包括处理器中的数据信号处理相 关的控制器和摄像头传感器。摄像头传感器 又可以分为普通型和智能型的。摄像机硬件 对软件部分主要提供视频数据。
第一部分 Camera 系统的结构
在理论上,照相机的取景器、视频、 照片等数据都可以传送到 Java 层,但是通常 情况下,这些数据不需要传递到 Java 层。仅 有少数情况需要在 Java 层获取数据流,例如 通过摄像头进行扫面识别的时候,需要取景 器的数据帧。
第一部分 Camera 系统的结构
第一部分 Camera 系统的结构
自下而上, Camera 系统分成了以下几个部分。 ( 1 )摄像头驱动程序:通常基于 Linux 的 Video for Linux 视频驱动框架。 ( 2 ) Camera 硬件抽象层 frameworks/base/include/ui/ frameworks/base/include/camera/ 主要的文件为 CameraHardwareInterface.h ,需要各 个系统根据自己的情况实现。 ( 3 ) Camera 服务部分 frameworks/base/camera/libcameraservice/ Camera 服务是 Android 系统中一个单独部分,通过 调用 Camera 硬件抽象层来实现。
毕业设计(论文)-基于安卓的聊天App的设计与实现

本文在分析了当前环境下聊天 App 的发展前景后,进行了系统的设计和实现,并对 系统进行了完整的测试。系统具有界面友好,操作简单,方便实用的特点。 关键词: Android;即时通讯;环信;聊天 计与实现
Design and Imple mentation of Android Chat room
2.3.4 Broadcast Receiver ...................................................................................................... - 9 2.4 ANDROID 和其它手机操作系统的比较................................................................................ - 9 2.5 本章小结........................................................................................................................- 10 -
安徽工程大学毕业设计(论文)
常见编程框架介绍

常见编程框架介绍⽂章⼤纲⼀、C/C++⼆、C#三、cocos2d-x四、go语⾔五、Hadoop六、HBase七、PHP⼋、python九、Spark⼗、Storm⼗⼀、Unity3D⼗⼆、Java⼗三、Android⼗四、Object-C与swift⼗五、.NET⼗六、R语⾔⼀、C/C++1. 简介C语⾔是⽬前世界上流⾏、使⽤最⼴泛的⾼级程序设计语⾔。
C语⾔对操作系统和系统使⽤程序以及需要对硬件进⾏操作的场合,⽤C语⾔明显优于其它⾼级语⾔,许多⼤型应⽤软件都是⽤C语⾔编写的。
C语⾔具有绘图能⼒强,可移植性,并具备很强的数据处理能⼒,因此适于编写系统软件,三维,⼆维图形和动画它是数值计算的⾼级语⾔。
2. 特点(1)C语⾔属于⽐较低级的语⾔,仅次于汇编,这个低级主要指它和硬件关系⽐较紧密。
(2)应⽤⼴泛;⼏乎可以给任何电⼦设备编程,可以做很底层的开发如操作系统/驱动等。
所以如楼上所说嵌⼊式等地⽅的开发会⼤量⽤到C语⾔。
(3)简单;因为是低级语⾔,所以不会提供很多的编程特性,如⾯向对象、多态、重载等等都不会出现。
这也是为什么⼤学会⼤⾯积要求C语⾔课程⽽不是C++C#(当然,这指的是语⾔特性简单,不是指编写C语⾔程序简单,毕竟提出新的语⾔特性就是为了简化coding),⽤C语⾔写简单的程序来⼊门编程是个不错的组合。
3. 优点1.1 简洁紧凑、灵活⽅便C语⾔⼀共只有32个关键字,9种控制语句,程序书写⾃由,主要⽤⼩写字母表⽰。
它把⾼级语⾔的基本结构和语句与低级语⾔的实⽤性结合起来。
C语⾔可以象汇编语⾔⼀样对位、字节和地址进⾏操作,⽽这三者是计算机最基本的⼯作单元。
1.2 运算符丰富C的运算符包含的范围很⼴泛,共有种34个运算符。
C语⾔把括号、赋值、强制类型转换等都作为运算符处理。
从⽽使C的运算类型极其丰富表达式类型多样化,灵活使⽤各种运算符可以实现在其它⾼级语⾔中难以实现的运算。
1.3 数据结构丰富C的数据类型有:整型、实型、字符型、数组类型、指针类型、结构体类型、共⽤体类型等。
驱动的概念和分类及安全性

(3)linux 本质上是宏内核,但是又吸收了微内核的模块化特性,提现在 2 个层面。 静态模块化:在编译时实现可裁剪,特征是想要功能裁剪,改变必须重新 编译(需要关机重启)动态模块化: zImage 可以不重新编译烧录,甚至可以不关机重启就实现模块的安装和 卸载,比如驱动的安装。 4、linux 设备驱动分类 (1)驱动分类 字符设备驱动、块设备驱动、网络设备驱动; 分类原则是设备读写操作的特征差异;
(1)宏内核(又称为单内核) 将内核从整体上作为一个大过程(整体看做一个程序)实现,并同时运行 在一个单独的地址空间。 所有的内核服务都在一个地址空间运行,相互之间直接调用函数,简单高 效。 紧耦合,动一发而动全身。 (2)微内核 功能被划分成独立的过程程序(独立的模块),过程间通过 IPC(进程间 通信)进行通信。 模块化程度高,一个服务失效不会影响另外一个服务。 典型如 windows。但效率低。
(2)三类驱动程序详细对比分析 字符设备,即“字节设备”。软件操作设备时,以字节为单位进行的。典型 的如 LCD、串口、LED、蜂鸣器、触摸屏。 块设备,相对于字符设备定义的。软件操作设备时,以块(多个字节构成 的一个单位)为单位的。设备的块大小是设备本身设计时定义好的,软件不 能去更改,但不同设备的块大小可以不一样。常见的块设备都是存储类设 备,如硬盘、NandFlash、iNand、SD。 网络设备,网络设备是专为网卡设计的驱动模型。linux 中网络设备驱动 主要目的是为了支持 API 中 socket 相关函数的工作。 (3)为什幺字符设备驱动最重要? 常见大量设备都属于字符设备 5、驱动程序的安全性要求
(3)常见驱动安全性问题 未初始化指针; 恶意用户程序; 缓冲区溢出; 竞争状态。 学习驱动要点 1、先学好 C 语言 2、硬件操作方面
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
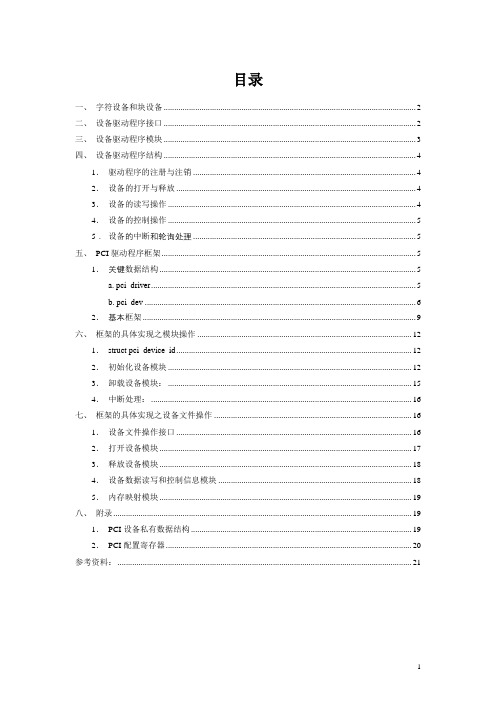
字符驱动框架1.1.1 字符驱动框架接下来将前面所讲述的编写驱动的知识融合起来,给出一个完整的字符驱动程序的框架,一个典型的字符驱动框架略缩图如图0.1所示。
相关头文件相关变量和宏定义#include <linux/init.h> #include <linux/module.h>...static int char_cdev_open(struct inode *inode, struct file *file ){}open 方法static int char_cdev_release(struct inode *inode, struct file *file ){}release 方法static ssize_t char_cdev_read(struct file *file, char *buf,size_t count, loff_t *f_pos){}read 方法static ssize_t char_cdev_write(struct file *file, const char *buf, size_t count, loff_t *f_pos){}write 方法static int char_cdev_ioctl(struct inode *inode, struct file *file, unsigned int cmd, unsigned long arg){}ioctl 方法struct file_operations char_cdev_fops = { .owner = THIS_MODULE, .read = char_cdev_read, .write = char_cdev_write,.open = char_cdev_open, .release = char_cdev_release, .ioctl = char_cdev_ioctl };fops 定义static int __init char_cdev_init(void){}module_init(char_cdev_init);static void __exit char_cdev_exit(void){}module_exit(char_cdev_exit);MODULE_LICENSE("GPL");模块初始化代码模块退出代码协议声明模块描述图0.1 char_cdev 字符驱动框架略缩图从略缩图来看,字符驱动框架很简单,与前面一节程序代码相比,只增加了fops的定义以及char_cdev_xxx各方法的实现(尽管差不多是空函数)。
一般的字符驱动都可以套用这个框架,增加设备的实质性操作代码即可。
字符驱动框架完整代码如程序清单0.1所示。
程序清单0.1字符驱动程序框架1 #include <linux/init.h>2 #include <linux/module.h>3 #include <linux/fs.h>4 #include <linux/cdev.h>5 #include <linux/device.h>67 static int major = 232; /* 静态设备号方式的默认值*/8 static int minor = 0; /* 静态设备号方式的默认值*/9 module_param(major, int, S_IRUGO);10 module_param(minor, int, S_IRUGO);1112 struct cdev *char_cdev; /* cdev数据结构*/13 static dev_t devno; /* 设备编号*/14 static struct class *char_cdev_class;1516 #define DEVICE_NAME "char_cdev"1718 static int char_cdev_open(struct inode *inode, struct file *file )19 {20 try_module_get(THIS_MODULE);21 printk(KERN_INFO DEVICE_NAME " opened!\n");22 return 0;23 }2425 static int char_cdev_release(struct inode *inode, struct file *file )26 {27 printk(KERN_INFO DEVICE_NAME " closed!\n");28 module_put(THIS_MODULE);29 return 0;30 }3132 static ssize_t char_cdev_read(struct file *file, char *buf,size_t count, loff_t *f_pos)33 {34 printk(KERN_INFO DEVICE_NAME " read method!\n");35 return count;36 }3738 static ssize_t char_cdev_write(struct file *file, const char *buf, size_t count, loff_t *f_pos)39 {40 printk(KERN_INFO DEVICE_NAME " write method!\n");41 return count;42 }4344 static int char_cdev_ioctl(struct inode *inode, struct file *file, unsigned int cmd, unsigned long arg)45 {46 printk(KERN_INFO DEVICE_NAME " ioctl method!\n");47 return 0;48 }4950 struct file_operations char_cdev_fops = {51 .owner = THIS_MODULE,52 .read = char_cdev_read,53 .write = char_cdev_write,54 .open = char_cdev_open,55 .release = char_cdev_release,56 .ioctl = char_cdev_ioctl57 };5859 static int __init char_cdev_init(void)60 {61 int ret;6263 if (major > 0) { /* 静态设备号*/64 devno = MKDEV(major, minor);65 ret = register_chrdev_region(devno, 1, "char_cdev");66 } else { /* 动态设备号*/67 ret = alloc_chrdev_region(&devno, minor, 1, "char_cdev"); /* 从系统获取主设备号*/68 major = MAJOR(devno);69 }70 if (ret < 0) {71 printk(KERN_ERR "cannot get major %d \n", major);72 return -1;73 }7475 char_cdev = cdev_alloc(); /* 分配char_cdev结构*/76 if (char_cdev != NULL) {77 cdev_init(char_cdev, &char_cdev_fops); /* 初始化char_cdev结构*/78 char_cdev->owner = THIS_MODULE;79 if (cdev_add(char_cdev, devno, 1) != 0) { /* 增加char_cdev到系统中*/80 printk(KERN_ERR "add cdev error!\n");81 goto error;82 }83 } else {84 printk(KERN_ERR "cdev_alloc error!\n");85 return -1;86 }8788 char_cdev_class = class_create(THIS_MODULE, "char_cdev_class");89 if (IS_ERR(char_cdev_class)) {90 printk(KERN_INFO "create class error\n");91 return -1;92 }9394 //device_create(char_cdev_class, NULL, devno, NULL, "char_cdev" "%d", MINOR(devno));95 device_create(char_cdev_class, NULL, devno, NULL, "char_cdev", NULL);96 return 0;9798 error:99 unregister_chrdev_region(devno, 1); /* 释放已经获得的设备号*/ 100 return ret;101 }102103 static void __exit char_cdev_exit(void)104 {105 cdev_del(char_cdev); /* 移除字符设备*/106 unregister_chrdev_region(devno, 1); /* 释放设备号*/107 device_destroy(char_cdev_class, devno);108 class_destroy(char_cdev_class);109 }110111 module_init(char_cdev_init);112 module_exit(char_cdev_exit);113114 MODULE_LICENSE("GPL");115 MODULE_AUTHOR("Chenxibing, linux@");对框架进行一些说明:⏹第(18)~(23)行是驱动open方法的实现代码,其中第(20)行的try_module_get()用于增加模块引用计数,设备每被打开1次,模块引用计数加1;⏹第(25)~(30)行市驱动release方法的实现代码,其中(28)行的module_put()用于递减模块引用计数,设备被关闭1次,模块引用计数减1;当引用计数为0时,模块可以被卸载;⏹第(32)~(36)行是驱动read方法的实现代码;⏹第(38)~(42)行是驱动write方法的实现代码;⏹第(44)~(48)行是驱动ioctl方法的实现代码;⏹第(50)~(57)行是驱动fops的定义;⏹在第(77)行通过cdev_init()将fops与设备相关联。